[0001] Настоящее изобретение относится к съемному приспособлению для обработки стен или потолков с удалением или сглаживанием материала для передвижного манипуляционного устройства, в частности для передвижной рабочей машины. Кроме того, настоящее изобретение относится к манипуляционному устройству, в частности к передвижной рабочей машине, содержащей ходовую часть, верхнюю часть и стрелу-манипулятор, причем стрела-манипулятор поддерживает съемное приспособление. Кроме того, изобретение относится к применению съемного приспособления с манипуляционным устройством.
[0002] Съемное приспособление в соответствии с ограничительной частью пункта 1 формулы изобретения известно из ЕР 2960014 А2. В этом документе раскрыто шлифовальное и/или фрезерное устройство для шлифования и/или фрезерования поверхностей, таких как стены, потолки и полы и т.п., здания во время его реконструкции, содержащее шлифовальную и/или фрезерную головку по меньшей мере с одним шлифовальным кругом и/или фрезой с приводом от двигателя для абразивной обработки поверхности и/или покрытия поверхности, причем шлифовальное и/или фрезерное устройство содержит шлифовальную и/или фрезерную головку, которая выполнена с возможностью прикрепления к подвижному манипулятору посредством соединительного устройства.
[0003] ЕР 2960014 А2 в одном варианте осуществления описывает так называемое телескопическое устройство между шлифовальной и/или фрезерной головкой и соединительным устройством. Однако в ЕР 2960014 А2 не описаны конкретные компоновки такого телескопического устройства. Это относится, в частности, к конкретной операции при механической обработке потолка.
[0004] Устройства для удаления, сглаживания и/или придания шероховатости материалу для целей настоящего изобретения выполнены, например, в виде полировальных машин, шлифовальных машин и/или фрезерных машин для обработки плоских поверхностей. Обычно это включает в себя обеспечение обрабатывающей головки, поддерживающей один или более инструментов. Инструменты приводят в действие для осуществления относительного перемещения между инструментами и обрабатываемой поверхностью.
[0005] Основной областью применения таких машин является обработка пола. Соответственно, известны машины для обработки (шлифования, полирования, очистки, фрезерования и т.д.) бетонных полов, каменных полов и других оснований. В этом контексте ссылка сделана в качестве примера на WO 94/08752 А1, который описывает машину для обработки каменных полов.
[0006] Однако настоящее изобретение относится к оборудованию, которое, главным образом, выполнено с возможностью обработки соответствующих плоских поверхностей на стенах и/или потолке. Для целей настоящего изобретения термин "стена" включает в себя боковые стенки и потолочные стенки. Однако термин "стена" не относится к полу или поверхности пола.
[0007] Прилагаются усилия для создания машин, подходящих для обработки стен, т.е. не полов, с удалением или сглаживанием материала. При обработке бетона, стяжки, природных камней и т.п. должно быть обеспечено определенное контактное давление и/или определенное опорное давление. Только тогда инструмент может оказывать абразивное или сглаживающее воздействие на соответствующий материал. Имеющиеся в продаже обрабатывающие головки для машин для обработки полов, например, воздействуют на пол опорным весом 80-300 кг. Соответственно, требуемое контактное давление просто обеспечивается собственным весом машины. Поскольку собственный вес не подвержен каким-либо заметным колебаниям, контактное давление является постоянным. Это важно для качества результата обработки.
[0008] Это также объясняет, почему машины, предназначенные для обработки полов, не подходят для обработки боковых стен или потолка. В этом случае потребовалось бы не только нести вес самой машины, но и обеспечить необходимое контактное давление без значительных колебаний.
[0009] Один из подходов состоит в проектировании машин как съемных приспособлений, которые могут быть установлены на стрелу-манипулятор манипуляционного устройства или передвижной рабочей машины. В этом контексте, в дополнение к ЕР 2 960 014 А2, сделана ссылка, например, на документы WO 2007/141320 Al, DE 102006056179 А1 и FR 2725932 А1. Приведенная в качестве примера компоновка подходящего манипуляционного устройства, которое выполнено как передвижная рабочая машина с дистанционным управлением, известно из ЕР 2508680 А1.
[0010] Соответственно, съемные приспособления для шлифования или фрезерования стен или потолков как таковые известны в общих чертах. Однако было обнаружено, что на практике все еще существуют недостатки, которые могут привести к неизбежному ухудшению технических характеристик и, в частности, качества результата работы.
[0011] На этом фоне задачей настоящего изобретения является создание соответствующего съемного приспособления и манипуляционного устройства, оснащенного таким съемным приспособлением, которое обеспечивает возможность обработки стен или потолков и которое дополнительно улучшает традиционные конструкции. В предпочтительном варианте осуществления изобретения могут быть увеличены производительность удаления и/или площадная производительность. Обеспечение высокого постоянного качества обработки также является предпочтительным. В предпочтительном варианте приспособление выполнено таким образом, чтобы оператор мог легко управлять обработкой и контролировать ее. Кроме того, съемное приспособление предпочтительно выполнено таким образом, что возможно универсальное применение с различными типами манипуляционных устройств, рабочих машин, держателей инструментов и т.д. Желательно, чтобы съемное приспособление было как можно более автономным, по меньшей мере в отношении управления/регулирования и/или, в целом, обмена информацией с устройством управления манипуляционного устройства. Следовательно, если это возможно, съемное приспособление должно быть выполнено таким образом, чтобы стандартные манипуляционные устройства могли быть приспособлены для использования съемного приспособления без особых усилий.
[0012] В конечном итоге, в контексте настоящего изобретения предлагается соответствующее применение съемного приспособления для обработки потолков или стен.
[0013] Что касается съемного приспособления, задача изобретения решена посредством съемного приспособления для обработки стенок или потолков при помощи операций удаления материала или сглаживания материала для передвижного манипуляционного устройства, в частности для передвижной рабочей машины, причем съемное приспособление содержит:
- монтажный блок, выполненный с возможностью установки на монтажный соединительный узел манипуляционного устройства,
причем монтажный блок обеспечивает по меньшей мере два взаимно смещенных поворотных положения для съемного приспособления,
- обрабатывающую головку, выполненную с возможностью оснащения по меньшей мере одним инструментом для обработки посредством операций удаления материала или сглаживания материала, и
- компенсационное устройство, расположенное между монтажным блоком и обрабатывающей головкой и задающее продольную ось,
причем обрабатывающая головка выполнена с возможностью перемещения относительно монтажного блока в продольном направлении вдоль продольной оси, и
компенсационное устройство выполнено с возможностью обеспечения заданной силы контактного давления, прикладываемой обрабатывающей головкой к обрабатываемой поверхности в заданном рабочем диапазоне вдоль продольной оси.
[0014] В соответствии с изобретением компенсационное устройство обеспечивает возможность простого управления во время обработки без перенапряжения оператора. Было обнаружено, что сложные средства управления приводят к сложному управлению, которое не принято на практике. В предпочтительном варианте между съемным приспособлением и манипуляционным устройством не передают управляющие команды или другую информацию. Иными словами, съемное приспособление выполнено с возможностью обеспечения его автономности с точки зрения управления по меньшей мере в примерах вариантов осуществления.
[0015] Строго говоря, с одной стороны, оператору придется управлять манипуляционным устройством, которое, в свою очередь, должно прикладывать удерживающую силу для прижатия съемного приспособления к стене или потолку с требуемым давлением. Было обнаружено, что манипуляционное устройство, которое также генерирует движение подачи обрабатывающей головки вдоль обрабатываемой поверхности, не может обеспечить желаемое контактное давление с требуемой точностью и последовательностью. Однако чрезмерные колебания давления могут повлиять на результат обработки.
[0016] Таким образом, согласно вышеупомянутому аспекту предполагается, что манипуляционное устройство прикладывает определенную удерживающую силу для поддержки съемного приспособления, но не отвечает за поддержание требуемой точности контактной силы. Компенсационное устройство на самом съемном приспособлении обеспечивает нахождение результирующего контактного давления в пределах достаточно малого поля допуска. Таким образом, компенсационное устройство может компенсировать колебания давления, которые возникают в результате изменений местоположения или других колебаний удерживающей силы, по меньшей мере в определенном рабочем диапазоне (диапазоне расстояний относительно рабочей поверхности). В предпочтительном варианте осуществления изобретения рабочий диапазон является достаточно большим, так что на практике при обычных отклонениях или перемещениях между обрабатывающей головкой и монтажным соединительным узлом манипуляционного устройства, тем не менее, присутствует контактное давление, которое является как можно более постоянным. Предпочтительно это не требует непосредственного вмешательства оператора в работу съемного приспособления.
[0017] Такой подход обеспечивает практичную и понятную работу, а также позволяет выполнить съемное приспособление как можно более автономным. Съемное приспособление может быть использовано с различными манипуляционными устройствами без особых усилий по преобразованию. Помимо приблизительного выравнивания оператор может сосредоточиться на движении подачи вдоль обрабатываемой поверхности в процессе обработки. Вмешательство потребуется, только если текущие колебания хода будут больше рабочего диапазона, например, в виде переориентации манипуляционного устройства.
[0018] Манипуляционное устройство поддерживает собственный вес съемного приспособления. Манипуляционное устройство действует как "жесткая" опора для съемного приспособления для поглощения соответствующих противодействующих сил, если это возможно. "Люфт" в климатической цепочке манипуляционного устройства или, в целом, "податливость" манипуляционного устройства могут быть компенсированы компенсационным устройством.
[0019] В предпочтительном варианте монтажный блок обеспечивает по меньшей мере одно положение для обработки потолка и еще одно положение для обработки (боковых) стен. Само собой разумеется, что может быть обеспечено более двух положений, например, для обеспечения возможности обработки стен, расположенных справа и слева, без перемещения манипуляционного устройства. Кроме того, могут быть обеспечены положения для обработки откосов.
[0020] Обрабатывающая головка оснащена приводом или соединена с приводом. Привод может быть приводом от электродвигателя или приводом от текучей среды (гидравлическим или пневматическим). Энергия для привода может подаваться на съемное приспособление через манипуляционное устройство. В принципе, также возможно использование приводов от двигателей внутреннего сгорания.
[0021] Съемное приспособление подходит для обработки бетона, натурального камня, штукатурки, гипса и т.п. Съемное приспособление может быть оснащено инструментами для шлифования, фрезерования, полирования, обработки бучардой и/или чистки. Обработка бучардой или техника обработки бучардой представляет собой способ придания шероховатости поверхностям. Таким образом, создают определенное профилирование поверхности.
[0022] В предпочтительном варианте осуществления изобретения съемное приспособление может быть приведено в действие только одним переключателем. Если такой переключатель приводит в действие как компенсационное устройство, так и обрабатывающую головку, то дальнейшее вмешательство оператора в непосредственное управление съемным приспособлением до обработки или во время обработки не требуется. Если известен фактический режим механической обработки (стен или потолка и горизонтальный или вертикальный, соответственно) и целевая скорость по меньшей мере одного инструмента на обрабатывающей головке, то достаточно простой активации с помощью переключателя ВКЛ/ВЫКЛ. В этом случае управление положением осуществляют при помощи манипуляционного устройства без вмешательства в непосредственное управление съемным приспособлением. Это позволяет оператору позиционировать съемное приспособление с обрабатывающей головкой, например, на определенном расстоянии от стены (или потолка). После приведения в действие переключателя активации приводится в действие обрабатывающая головка и компенсационное устройство, которое в этом случае прижимает обрабатывающую головку к стене (или потолку) с требуемым контактным давлением. Это значительно упрощает работу. Для съемного приспособления требуется несколько переключателей, предпочтительно только два переключателя или даже только один переключатель.
[0023] Заданный рабочий диапазон предпочтительно представляет собой заданную область пути вдоль продольной оси. Продольная ось определяет локальное продольное направление съемного приспособления. Во время механической обработки продольная ось перпендикулярна обрабатываемой поверхности, так что рабочий диапазон описывает расстояние или диапазон расстояний относительно этой поверхности.
[0024] Манипуляционное устройство представляет собой, например, передвижную рабочую машину с множеством осей перемещения и разомкнутой кинематической цепью, на конце которой установлено съемное приспособление. Кинематическая цепь может включать в себя, например, множество рычагов, которые могут поворачиваться на шарнирах относительно друг друга. Для целей настоящего изобретения тот участок или часть, которая находится ближе к обрабатываемой поверхности, называется дальним от центра участком или дальней от центра частью. Тот участок или часть, которая находится дальше от обрабатываемой поверхности, называется ближним к центру участком или ближней к центру частью. Далее термины "ближний к центру" и "дальний от центра" использованы для изображения и различения соответствующих секций или концевых участков деталей и узлов. Для целей вышеприведенного определения съемное приспособление расположено на дальнем от центра конце кинематической цепи манипуляционного устройства.
[0025] Для целей настоящего изобретения во время обработки регулярно происходит абразивное истирание или износ и удаление. С одной стороны, это может приводить к образованию пыли. Поэтому часто предусмотрено удаление пыли. Кроме того, также известна влажная механическая обработка, при которой для связывания пыли применяют жидкость. Тем не менее, следует обычно предполагать, что непосредственно обрабатываемая область загрязнена, так что даже опытному оператору нелегко немедленно оценить, есть ли существующее контактное давление, или выбраны ли должным образом другие параметры обработки. Кроме того, в этом контексте предпочтительно, чтобы компенсационное устройство регулировало и/или компенсировало контактное давление по меньшей мере в рабочем диапазоне.
[0026] В соответствии с примером варианта осуществления съемного приспособления компенсационное устройство компенсирует в рабочем диапазоне изменения положения соединительного узла съемного приспособления манипуляционного устройства вдоль продольной оси. Рабочий диапазон может покрывать определенное расстояние, например, определенное отклонение расстояния от нейтрального положения (нулевого положения) в обоих направлениях. Например, рабочий диапазон составляет 250 мм, причем в каждом случае обеспечено 125 мм от нейтрального положения в обоих направлениях для соответствующих колебаний хода. Таким образом, задача компенсационного устройства состоит в обеспечении достаточно высокого и как можно более постоянного контактного давления или соответствующей контактной силы даже в случае колебаний хода.
[0027] Иными словами, компенсационное устройство в примере варианта осуществления выполнено с возможностью обеспечения по существу постоянного или постоянного контактного давления в рабочем диапазоне, составляющем около 250 мм. Рабочий диапазон представляет собой, например, диапазон 250 мм +/- 25 мм.
[0028] В соответствии с другим примером варианта осуществления съемного приспособления в рабочем диапазоне компенсационного устройства возможны компенсирующие перемещения величиной по меньшей мере 200 мм вдоль продольной оси. В соответствии еще с одним вариантом осуществления возможны компенсирующие перемещения, равные по меньшей мере 300 мм. В соответствии с дополнительным вариантом осуществления возможны компенсирующие перемещения, равные по меньшей мере 400 мм. Значения представляют собой сумму отклонений в обоих направлениях от нейтрального положения.
[0029] Оператор выравнивает манипуляционное устройство таким образом, чтобы съемное приспособление находилось предпочтительно в нейтральном положении компенсационного устройства. Если механическая обработка начинается в этом положении, имеется достаточно компенсационного пространства для возможных компенсирующих перемещений. Целью является обеспечение контактного давления, которое будет как можно более постоянным.
[0030] В соответствии еще с одним примером варианта осуществления съемного приспособления компенсационное устройство может работать в первом рабочем режиме и по меньшей мере в одном втором рабочем режиме, причем первый рабочий режим учитывает вертикальную ориентацию продольной оси (или предназначен для нее), и по меньшей мере один второй рабочий режим учитывает горизонтальную ориентацию продольной оси (или предназначен для нее). В дополнительном рабочем режиме также может присутствовать горизонтальная ориентация продольной оси, в которой съемное приспособление повернуто на 180°. Дополнительный (второй) рабочий режим настроен соответствующим образом. Таким образом, можно обрабатывать правую или левую стену.
[0031] В этом контексте следует отметить, что в вертикальной ориентации для обработки потолков собственный вес действует иначе, чем в горизонтальной ориентации для обработки боковых стен. Это необходимо учитывать при обеспечении требуемого контактного давления. Таким образом, это не только вопрос поворота съемного приспособления. В этом случае по меньшей мере компенсационное устройство должно быть адаптировано к текущей ориентации, например, путем выбора соответствующего режима работы. Возможное целевое значение для контактного давления и/или контактной силы может составлять около 750-1800 Н (Ньютон) независимо от ориентации.
[0032] В соответствии с другим примером варианта осуществления съемного приспособления компенсационным устройством управляют таким образом, чтобы обеспечивать по существу постоянное контактное давление в рабочем диапазоне. Это относится, в частности, к обычным вариантам применения без преднамеренной или непреднамеренной неправильной работы. В соответствии с одним примером варианта осуществления результирующее контактное давление в рабочем диапазоне изменяется максимум на 15%. В соответствии с другим примером варианта осуществления результирующее контактное давление в рабочем диапазоне изменяется максимум на 10%. В соответствии еще с одним примером варианта осуществления результирующее контактное давление в рабочем диапазоне изменяется максимум на 5%. Иными словами, компенсационное устройство может обеспечивать по существу постоянное контактное давление даже при значительных компенсирующих перемещениях.
[0033] Если в контексте настоящего изобретения сделана ссылка на заданное контактное давление, это может также включать заданный диапазон допуска и/или диапазон колебаний. В контексте настоящей заявки следует понимать, что это не вопрос абсолютной точности, а вопрос обеспечения постоянного результата работы без значительных колебаний.
[0034] В соответствии еще с одним примером варианта осуществления съемного приспособления компенсационное устройство содержит по меньшей мере один рабочий цилиндр, проходящий в продольном направлении, причем рабочий цилиндр выполнен с возможностью соединения с источником подачи рабочей среды под давлением манипуляционного устройства, и регулирование фактического давления в рабочем цилиндре при текущем давлении подачи осуществляют за счет регулирования давления, обеспечиваемого в самом съемном приспособлении. В случае колебаний хода, которые оказывают соответствующее влияние на положение рабочего цилиндра, встроенный регулятор давления обеспечивает поддержание требуемого уровня давления и/или уровня силы на обрабатывающей головке. Например, рабочий цилиндр проходит между ближним к центру концом и дальним от центра концом компенсационного устройства.
[0035] Нет необходимости в передаче осуществления этого управления манипуляционному устройству. Вместо этого достаточно, чтобы манипуляционное устройство обеспечивало определенное входное давление, причем колебания давления в применяемом давлении системы (давлении подачи) выравнивают в съемном приспособлении при помощи подходящих компонентов (редукторов давления или аналогичных компонентов).
[0036] Кроме того, оператор освобожден от задачи проверки и, при необходимости, повторной регулировки давления. Управление давлением на съемном приспособлении обеспечивает независимо от текущего положения рабочего цилиндра приложение давления одного и того же уровня, насколько это возможно, по крайней мере в рабочем диапазоне для обеспечения требуемого контактного давления. Иными словами, также нет необходимости в постоянном повторном выравнивании манипуляционного устройства для компенсации каких-либо колебаний хода в продольном направлении. Это может быть необходимо, если существующие колебания или отклонения превышают текущий рабочий диапазон.
[0037] В соответствии с другим примером варианта осуществления съемного приспособления компенсационное устройство дополнительно содержит продольную направляющую для обрабатывающей головки, которая направляет перемещение обрабатывающей головки в продольном направлении независимо от текущей ориентации съемного приспособления. В качестве примера, продольная направляющая выполнена в виде роликовой направляющей. Направляющая выполнена с возможностью обеспечения низкого трения. Если выполнена отдельная направляющая, то задача обеспечения направленного движения не является задачей рабочего цилиндра или не является только задачей рабочего цилиндра. Любое воздействие (боковых) направляющих на рабочий цилиндр может быть сведено к минимуму. Продольная направляющая обеспечивает положительное направленное движение в продольном направлении. Продольная направляющая предпочтительно выполнена в виде закрытой направляющей, так что направляющая функция обеспечивается независимо от текущей ориентации съемного приспособления.
[0038] В соответствии с другим примером варианта осуществления съемного приспособления продольная направляющая содержит направляющую раму, в которой расположена профильная каретка, выполненная с возможностью перемещения относительно направляющей рамы, которая опирается на направляющую раму, причем на одном конце профильной каретки расположена обрабатывающая головка.
[0039] Иными словами, одна из двух направляющих частей, которые выполнены с возможностью перемещения относительно друг друга, соединена с обрабатывающей головкой. Другая направляющая часть соединена с монтажным блоком. Это обеспечивает возможность перемещения вдоль продольной оси между обрабатывающей головкой и монтажным блоком. Например, рабочий цилиндр содержит корпус цилиндра и поршневой шток, расположенный в корпусе цилиндра. Например, поршневой шток соединен с обрабатывающей головкой. Соответственно, корпус цилиндра соединен с монтажным блоком. Однако возможно и обратное соотнесение. Компенсационное устройство также может называться телескопической направляющей или телескопическим компенсационным устройством.
[0040] В качестве примера, направляющая содержит профиль каретки и/или каретку, установленную на роликовую направляющую и/или роликовые подшипники. Возможный вариант осуществления продольной направляющей включает в себя направляющие поверхности на продольных краях профиля скольжения, причем элементы качения или ролики снабжены соответствующими V-образными или U-образными канавками, которые контактируют с краями профиля скольжения. Соответственно, профиль скольжения может содержать четыре края по периметру, на которых расположены соответствующие элементы качения или ролики. Это обеспечивает направляющую функцию независимо от текущей ориентации съемного приспособления.
[0041] В соответствии с другим примером варианта осуществления съемного приспособления компенсационное устройство также содержит визуальный индикатор для визуализации текущего рабочего положения обрабатывающей головки в рабочем диапазоне. Визуальный индикатор прикреплен к съемному приспособлению таким образом, чтобы он был хорошо виден оператору. Это может быть просто указатель, к которому привязана шкала, например, для представления рабочего диапазона. Например, съемное приспособление содержит соответствующие указатели на двух или более сторонах, так что индикатор может быть виден независимо от текущей ориентации съемного приспособления.
[0042] Кроме того, эта мера имеет преимущество, заключающееся в отсутствии необходимости обмена информацией с манипуляционным устройством для предоставления оператору информации. Например, шкала может содержать качественную информацию, такую как цветовое кодирование, в дополнение к количественной информации (такой как длина и деление рабочего диапазона). Например, зеленый цвет может обозначать центральную область шкалы, где находится нейтральное положение. Например, в направлении к двум краям шкалы цвет может меняться через желтый на красный. Если указатель находится в красной области, это заставит оператора переместить манипуляционное устройство или иным образом воздействовать на манипуляционное устройство и/или съемное приспособление.
[0043] И наоборот, индикатор может обеспечивать обратную связь оператору, свидетельствующую о том, что стена или потолок обрабатываются правильно, и что контактное давление находится в пределах требуемого диапазона.
[0044] В соответствии с другим примером варианта осуществления съемного приспособления обрабатывающая головка соединена с одним концом компенсационного устройства посредством шарнирного соединения. В качестве примера обеспечен по меньшей мере один смещающий элемент для приведения обрабатывающей головки к требуемой ориентации. Шарнирное соединение обеспечивает выравнивание обрабатывающей головки как можно ближе к параллельному положению относительно обрабатываемой поверхности. Шарнирное соединение расположено на дальнем от центра конце компенсационного устройства.
[0045] Выравнивание обрабатывающей головки осуществляют посредством контактной силы и/или контактного давления. Тем не менее, смещающие элементы, такие как пружины в виде пружин растяжения, могут помочь обеспечить предпочтительную ориентацию обрабатывающей головки относительно продольной оси даже при отсутствии контакта с обрабатываемым участком.
[0046] В соответствии еще с одним примером варианта осуществления съемного приспособления, шарнирное соединение выполнено в виде карданного шарнирного соединения, обеспечивающего две оси поворота, которые ориентированы перпендикулярно друг другу и перпендикулярно продольной оси. В примере варианта осуществления изобретения две оси поворота пересекаются, при этом продольная ось также пересекает оси поворота. Карданный подвес съемного приспособления обеспечивает легкое выполнение необходимых компенсирующих перемещений для обеспечения требуемой параллельной опоры обрабатывающей головки при необходимости.
[0047] Кроме того, задача изобретения решена при помощи передвижного манипуляционного устройства, в частности передвижной рабочей машины, которое содержит следующее:
- ходовую часть, содержащую ходовой привод,
- верхнюю часть, поддерживающую управляемую стрелу-манипулятор,
- блок подачи рабочей среды под давлением,
- устройство управления и
- съемное приспособление в соответствии по меньшей мере с одним из примеров вариантов осуществления, описанных в настоящей заявке,
причем компенсационное устройство снабжается рабочей средой под давлением посредством блока подачи рабочей среды под давлением,
средство управления выполнено с возможностью направления съемного приспособления в заданной ориентации относительно стены или потолка и позиционирования соединительного узла съемного приспособления на заданном расстоянии от стены или потолка во время движения подачи съемного приспособления вдоль стены или потолка, которым управляют посредством команд оператора, а
компенсационное устройство выполнено с возможностью обеспечения контактного давления, прикладываемого обрабатывающей головкой к обрабатываемой поверхности, причем съемное приспособление опирается на манипуляционное устройство.
[0048] Таким образом, задача изобретения полностью решена.
[0049] В качестве примера, манипуляционное устройство выполнено в виде передвижной рабочей машины, такой как передвижная строительная машина. В качестве примера, манипуляционное устройство выполнено в виде передвижной рабочей машины с дистанционным управлением с собственным ходовым приводом. Такое устройство в целом схоже по конструкции с гидравлическим экскаватором, но непосредственно на устройстве отсутствует стойка управления или кабина водителя. Вместо этого им управляют при помощи отдельного блока управления, который соединен с устройством либо посредством кабеля, либо посредством беспроводной связи. Привод обычно является электрогидравлическим приводом, хотя возможны и другие типы привода. Вследствие своей компактности и отсутствия двигателей внутреннего сгорания такие машины также могут быть использованы внутри зданий.
[0050] Таким образом, манипуляционное устройство применяют не только для удержания и позиционирования съемного приспособления. Манипуляционное устройство также обеспечивает противодействующую или удерживающую силу для поддержания контактного давления, прикладываемого компенсационным устройством. Если возможно, манипуляционное устройство может быть позиционировано таким образом, что съемное приспособление и стрела-манипулятор находятся в очень жестком и неподатливом состоянии, с тем, чтобы обеспечить большую удерживающую силу. Однако практика показывает, что обычно имеется определенный люфт или податливость.
[0051] По этой причине только лишь манипуляционное устройство само по себе не может обеспечить требуемое постоянство контактного давления. Соответственно, предпочтительно обеспечить наличие своего рода "буфера" с компенсационным устройством, расположенным между обрабатывающей головкой и манипуляционным устройством.
[0052] Ходовая часть включает в себя гусеницы или колеса. Блок подачи рабочей среды под давлением содержит, например, встроенный насос. В альтернативном или дополнительном варианте осуществления изобретения блок подачи рабочей среды под давлением может быть оснащен соответствующим напорным резервуаром. При помощи соответствующих соединений для съемных приспособлений на него могут подавать соответствующую рабочую среду под давлением (гидравлическое масло).
[0053] В примере варианта осуществления корпус может вращаться вокруг вертикально ориентированной оси относительно ходовой части. Обычно стрела-манипулятор содержит ряд шарнирно-соединенных секций стрелы-манипулятора, расположенных последовательно с образованием кинематической цепи (разомкнутой кинематической цепи). Соответственно, конструкция со стрелой-манипулятором аналогична роботу с сочлененной рукой. Однако по сравнению с роботом с сочлененной рукой по меньшей мере в некоторых примерах вариантов осуществления имеется ограничение, заключающееся в том, что между шарнирно-соединенными секциями стрелы-манипулятора обеспечены в основном горизонтально ориентированные поворотные оси, которые ориентированы параллельно друг другу. Однако это не следует понимать как ограничение.
[0054] В соответствии еще с одним примером варианта осуществления манипуляционного устройства корпус выполнен с возможностью поворота относительно ходовой части, причем стрела-манипулятор содержит первую секцию стрелы-манипулятора, вторую секцию стрелы-манипулятора и третью секцию стрелы-манипулятора, которые образуют разомкнутую кинематическую цепь и выполнены с возможностью поворота относительно друг друга, причем первая секция стрелы-манипулятора установлена с возможностью поворота на корпусе, третья секция стрелы-манипулятора поддерживает монтажный соединительный узел, который расположен с возможностью поворота на третьей секции стрелы-манипулятора, причем оси поворота секций стрелы-манипулятора ориентированы параллельно друг другу и перпендикулярно оси поворота корпуса относительно ходовой части, при этом оси поворота связаны с приводами, которые выполнены с возможностью управления посредством устройства управления. Приводы представляют собой, например, соответствующие цилиндры. Само собой разумеется, что при необходимости также обеспечено наличие устройств для определения положения и контроля положения.
[0055] В соответствии еще с одним примером варианта осуществления манипуляционного устройства монтажный соединительный узел выполнен с возможностью поворота на шарнире вокруг оси поворота для обеспечения параллельной ориентации обрабатывающей головки относительно стены или потолка. Это поворотное шарнирное перемещение может происходить относительно третьей секции стрелы-манипулятора. Таким образом, может быть обеспечена требуемая ориентация, параллельная обрабатываемой поверхности, независимо от текущего положения/ориентации стрелы-манипулятора. В качестве примера, устройство управления выполнено с возможностью обеспечения горизонтальной ориентации обрабатывающей головки в горизонтальном режиме посредством поворотных перемещений вокруг (горизонтальной) оси поворота относительно третьей секции стрелы-манипулятора. В этом случае примером служит продольная ось съемного приспособления, перпендикулярная ему, т.е. вертикально ориентированная. В качестве примера, этот режим подходит для механической обработки потолков.
[0056] В соответствии еще с одним примером варианта осуществления манипуляционного устройства, устройство управления может работать по меньшей мере в горизонтальном режиме или в вертикальном режиме, причем устройство управления управляет приводами манипуляционного устройства в горизонтальном режиме таким образом, что съемное приспособление перемещается (может перемещаться) по горизонтальной траектории, и устройство управления управляет приводами манипуляционного устройства в вертикальном режиме таким образом, что съемное приспособление перемещается (может перемещаться) по вертикальной траектории.
[0057] В соответствии еще с одним примером варианта осуществления устройство управления дополнительно выполнено с возможностью обеспечения перемещения съемного приспособления в горизонтальной плоскости в горизонтальном режиме. В альтернативном или дополнительном варианте осуществления устройство управления выполнено с возможностью обеспечения перемещения съемного приспособления в вертикальной плоскости в вертикальном режиме.
[0058] Предпосылки к этим вариантам осуществления заключаются в упрощении работы манипуляционного устройства в контексте задачи механической обработки и типичных вариантов применения съемного приспособления. Обработку стен или потолков обычно выполняют по извилистой линии, зигзагообразной линии или петлеобразной линии для обработки поверхности полностью и в кратчайшие сроки. Предпочтительно, это должно включать в себя как можно более равномерную обработку. Время выстоя обрабатывающей головки на каждом участке поверхности должно быть как можно более одинаковым.
[0059] Манипуляционное устройство, выполненное в соответствии с вариантами осуществления, описанными выше в настоящей заявке, в основном обеспечивает большее количество степеней свободы для перемещения, чем потребовалось бы для желаемой механической обработки плоских поверхностей обрабатывающей головкой, ориентированной как можно ближе к параллельному положению относительно поверхности.
[0060] В соответствии с вышеприведенным вариантом осуществления устройство управления манипуляционного устройства работает таким образом, что в результате некоторые степени свободы блокируются. Иными словами, "моделируется" уменьшенное количество степеней свободы, что обеспечивает возможность перемещения в требуемых плоскостях, но без отклонений от них. Если возможно, после установки оператором съемного приспособления с обрабатывающей головкой в требуемое начальное положение (параллельное выравнивание и контакт обрабатывающей головки с поверхностью), он может перемещать съемное приспособление только в двух измерениях, т.е. в пределах требуемой плоскости обработки. Устройство управления преобразует соответствующие управляющие команды в перемещения звеньев кинематической цепи. Таким образом, перемещение вдоль плоскости требует использования множества осей перемещения, которые взаимодействуют таким образом, что происходит предположительно простое перемещение в требуемой плоскости.
[0061] Это имеет особое значение для вышеописанного варианта осуществления манипуляционного устройства, содержащего стрелу-манипулятор с несколькими секциями стрелы-манипулятора и горизонтально проходящими осями поворота между секциями, особенно для механической обработки потолков вдоль плоскостей, проходящих по существу горизонтально. Если в данном случае устройство управления может работать таким образом, что текущее положение по высоте (вертикальное положение) и текущее выравнивание съемного приспособления могут быть "заблокированы" с точки зрения управления, то дальнейшая работа в отношении подачи вдоль требуемой траектории перемещения съемного приспособления значительно упрощается.
[0062] Таким образом, в горизонтальном режиме и/или вертикальном режиме определяют "виртуальные" плоскости, в которых обрабатывающая головка может перемещаться с требуемой ориентацией с помощью простых команд оператора. Оператор может легко использовать "виртуальные" оси или направления, такие как вверх/вниз и вправо/влево для механической обработки боковых стен и/или вправо/влево и вперед/назад для обработки потолков. Ввод может быть легко осуществлен посредством блока управления, например, при помощи джойстика. Преобразование в соответствующие перемещения звеньев кинематической цепи манипуляционного устройства осуществляют посредством устройства управления.
[0063] Кроме того, эти меры помогают поддерживать контактное давление в пределах требуемого целевого диапазона. Если бы оператору пришлось вручную управлять перемещением манипуляционного устройства вдоль всех имеющихся осей, это привело бы к значительным колебаниям контактного давления.
[0064] Согласно другому аспекту настоящее изобретение относится к применению съемного приспособления в соответствии с одним из примеров вариантов осуществления, описанных в настоящей заявке, с манипуляционным устройством для обработки стен или потолков с удалением или сглаживанием материала, причем манипуляционное устройство предпочтительно выполнено в виде дистанционно управляемой передвижной рабочей машины, и съемное приспособление может работать независимо от управляющих команд, подаваемых манипуляционным устройством, и может перемещаться вдоль обрабатываемой поверхности. Иными словами, во время работы отсутствует обмен информацией между съемным приспособлением и манипуляционным устройством по меньшей мере в примерах вариантов осуществления изобретения. Манипуляционное устройство удерживает и позиционирует съемное приспособление. Кроме того, манипуляционное устройство обеспечивает подачу рабочей среды под давлением, которую используют, например, для управления рабочим цилиндром компенсационного устройства съемного приспособления. Однако помимо этого нет никакого вмешательства в управление или регулирование работы компенсационного устройства со стороны манипуляционного устройства.
[0065] Например, само съемное приспособление не требует никаких прямых управляющих команд от оператора после приведения в действие во время работы. Таким образом, съемное приспособление может работать автономно с точки зрения управления. Съемное приспособление не работает автономно сточки зрения энергии, так как подачу энергии обеспечивает манипуляционное устройство. Это может включать электрическую или гидравлическую энергию. В частности, привод обрабатывающей головки может включать в себя электродвигатель или гидравлический привод.
[0066] Кроме того, согласно дополнительному аспекту настоящее изобретение относится к способу работы передвижного манипуляционного устройства, в частности передвижной рабочей машины, для обработки поверхностей стен или потолка с удалением или сглаживанием материала, причем манипуляционное устройство выполнено в соответствии по меньшей мере с одним из примеров вариантов осуществления, описанных в настоящей заявке, и поддерживает съемное приспособление в соответствии по меньшей мере с одним из примеров вариантов осуществления, описанных в настоящей заявке. Работа манипуляционного устройства может, как уже описано выше, включать в себя работу устройства управления в вертикальном или горизонтальном режиме с тем, чтобы обеспечивать разрешенные плоскости перемещения для съемного приспособления. Это может существенно снизить нагрузку на оператора, так как он, так сказать, предлагает только те степени свободы, которые фактически требуются для текущей операции механической обработки.
[0067] Следует понимать, что признаки изобретения, упомянутые выше и описанные ниже, могут быть применены не только в соответственно указанной комбинации, но также в других комбинациях или сами по себе в пределах объема настоящего изобретения.
[0068] Дополнительные признаки и преимущества изобретения раскрыты в последующем описании множества примеров вариантов осуществления со ссылкой на чертежи, на которых:
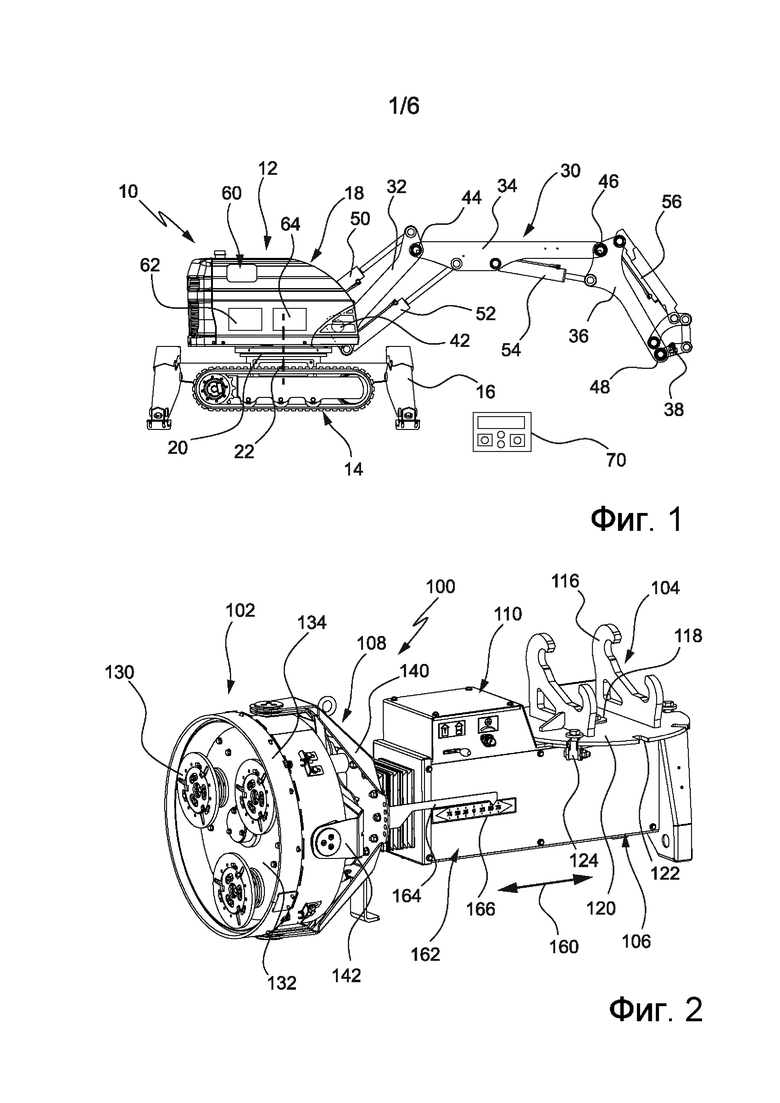
Фиг. 1 изображает вид сбоку примера варианта осуществления манипуляционного устройства, выполненного в виде передвижной рабочей машины;
Фиг. 2 изображает вид в перспективе варианта осуществления съемного приспособления;
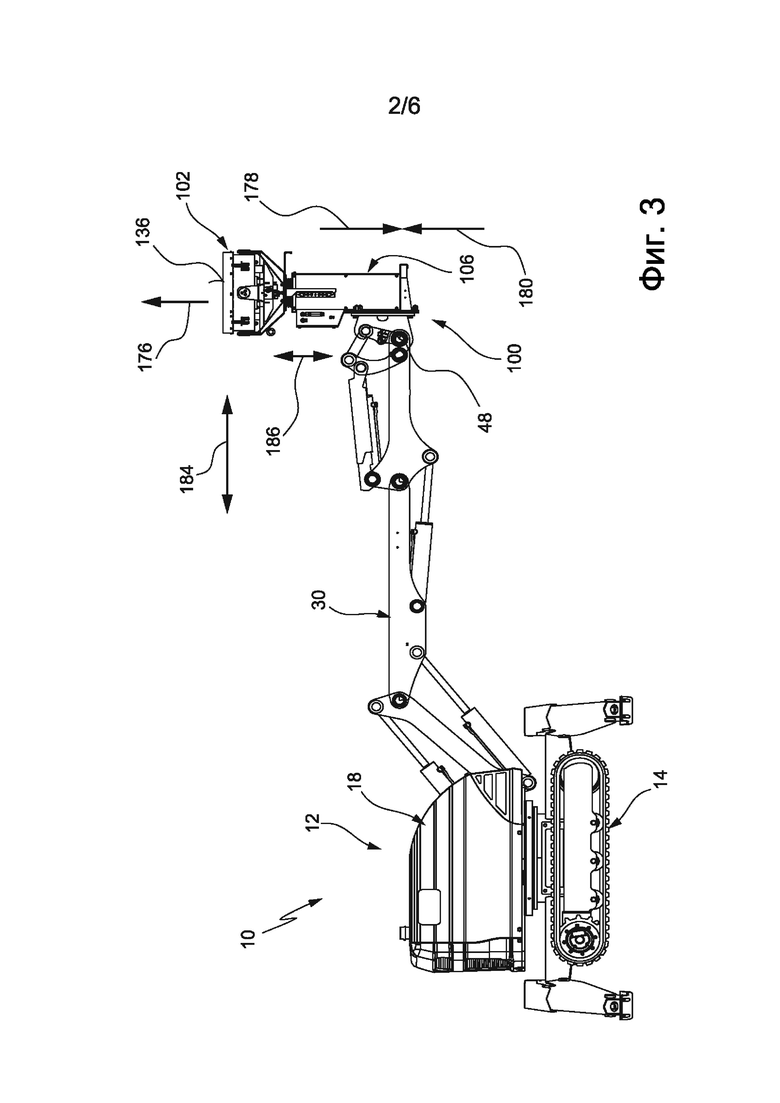
Фиг. 3 изображает вид сбоку манипуляционного устройства в соответствии с Фиг. 1, которое оснащено съемным приспособлением в соответствии с Фиг. 2, в конфигурации для обработки потолков;
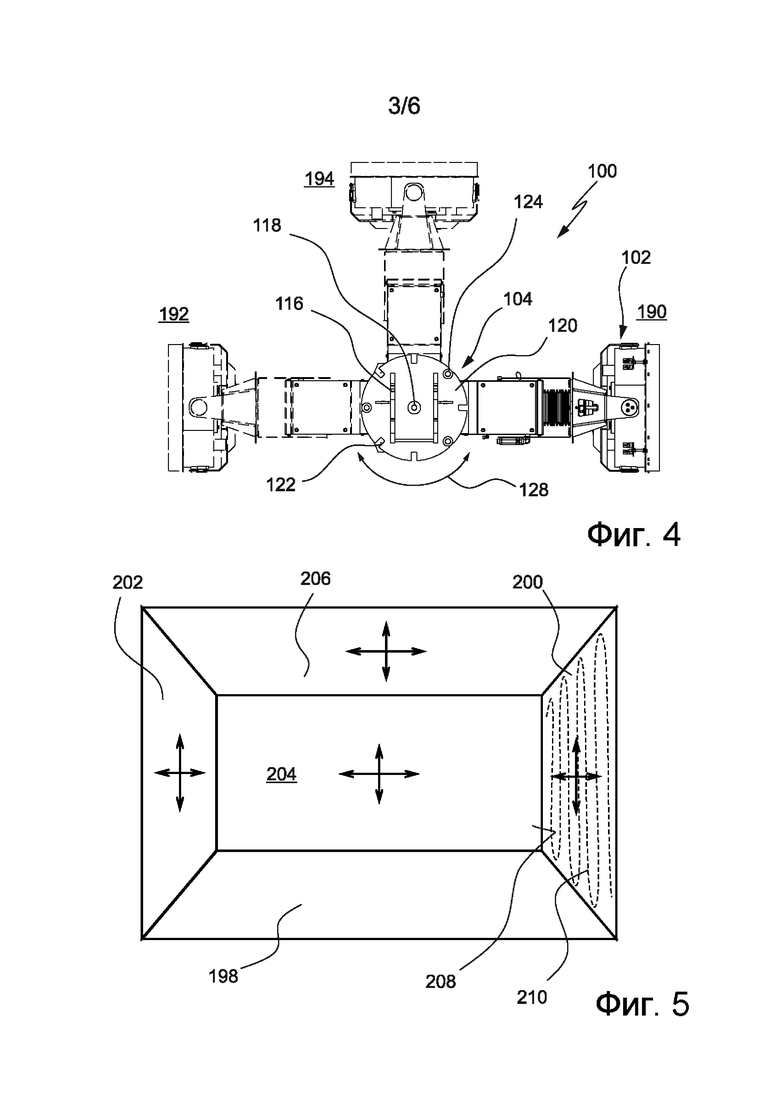
Фиг. 4 изображает компоновку съемного приспособления с точки зрения соединительного узла съемного приспособления манипуляционного устройства, на которой показаны различные варианты ориентации съемного приспособления;
Фиг. 5 изображает вид в перспективе помещения для изображения возможных поверхностей для механической обработки;
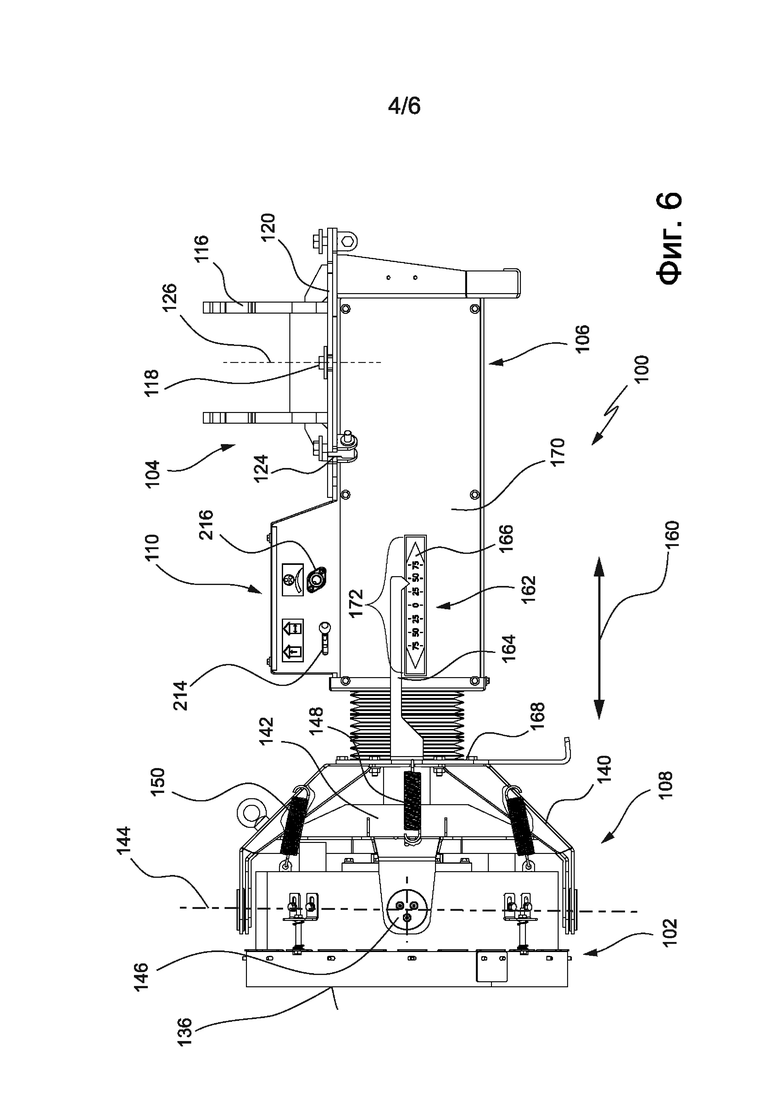
Фиг. 6 изображает вид сбоку съемного приспособления по Фиг. 2;
Фиг. 7 изображает еще один вид сбоку съемного приспособления по Фиг. 6, компоненты которого скрыты в иллюстративных целях; и
Фиг. 8 изображает вид в перспективе съемного приспособления в соответствии с Фиг. 6 и Фиг. 7 в частично разобранном состоянии.
[0069] На Фиг. 1 представлен со ссылкой на вид сбоку пример варианта осуществления манипуляционного устройства, которое в целом обозначено номером 10. В данном примере варианта осуществления согласно Фиг. 1 манипуляционное устройство 10 выполнено в виде передвижной рабочей машины 12.
[0070] Манипуляционное устройство 10 содержит ходовую часть 14, которая в примере варианта осуществления согласно Фиг. 1 выполнена в виде гусеничной ходовой части. Само собой разумеется, что ходовая часть 14 также может содержать колеса. Кроме того, манипуляционное устройство 10 содержит опоры, обозначенные номером 16, которые могут быть выдвинуты во время использования манипуляционного устройства 10. Иными словами, манипуляционное устройство 10 может быть поддомкрачено при необходимости.
[0071] Кроме того, ходовая часть 14 несет корпус 18, выполненный с возможностью вращения, например, относительно ходовой части 14 и/или опор 16. Для этой цели, например, между ходовой частью 14 и корпусом 18 расположен вращающийся узел или опорно-поворотный круг 20, который определяет вертикально ориентированную ось 22 вращения для корпуса 18. Опорно-поворотный круг 20 связан с подходящим приводом вращения.
[0072] Корпус 18 несет стрелу-манипулятор 30, которая выполнена в виде шарнирно-сочлененной стрелы. Стрела-манипулятор 30 содержит секции 32, 34, 36 стрелы-манипулятора. Секция 32 стрелы-манипулятора установлена на корпусе 18. Секция 34 стрелы-манипулятора расположена между секциями 32, 36 стрелы-манипулятора. Секция 36 стрелы-манипулятора расположена обращенной от корпуса 18 и/или удаленной от него. Секция 32 стрелы-манипулятора также может называться ближней к центру секцией 32 стрелы-манипулятора. Секция 36 стрелы-манипулятора также может называться дальней от центра секцией 36 стрелы-манипулятора. Секция 36 стрелы-манипулятора несет соединительный узел устройства или соединительный узел 38 съемного приспособления. К соединительному узлу 38 съемного приспособления могут быть присоединены съемные приспособления
[0073] Секция 32 стрелы-манипулятора прикреплена к корпусу 18 с возможностью поворота относительно оси 42 поворота. Секция 34 стрелы-манипулятора прикреплена к секции 32 стрелы-манипулятора с возможностью поворота относительно оси 44 поворота. Секция 36 стрелы-манипулятора прикреплена к секции 34 стрелы-манипулятора с возможностью поворота относительно оси 46 поворота. Соединительный узел 38 съемного приспособления установлен на секции 36 стрелы-манипулятора с возможностью поворота относительно оси 48 поворота. Начиная от ходовой части 14, корпус 18, секции 32, 34, 36 стрелы-манипулятора и соединительный узел 38 съемного приспособления образуют линейную разомкнутую кинематическую цепь. Оси 42, 44, 46 и 48 параллельны друг другу и каждая ориентирована перпендикулярно оси 22.
[0074] Для перемещения секции 32 стрелы-манипулятора относительно корпуса 18 обеспечен цилиндр 50. Для перемещения секции 34 стрелы-манипулятора относительно секции 32 стрелы-манипулятора обеспечен цилиндр 52. Для перемещения секции 36 стрелы-манипулятора относительно секции 34 стрелы-манипулятора обеспечен цилиндр 54. Для перемещения монтажного соединительного узла 38 относительно секции 36 стрелы-манипулятора обеспечен цилиндр 56.
[0075] На Фиг. 1 устройство управления манипуляционного устройства 10 обозначено номером 60. Устройство 60 управления управляет работой манипуляционного устройства 10. Кроме того, обеспечен приводной блок, обозначенный номером 62, в частности, электрогидравлический приводной блок. Кроме того, обеспечен блок 64 подачи рабочей среды под давлением. Блок 64 подачи рабочей среды под давлением содержит по меньшей мере один насос или напорный резервуар для обеспечения рабочей среды под давлением. Рабочей средой под давлением является подходящая текучая среда, такая как гидравлическое масло.
[0076] Кроме того, на Фиг. 1 показан блок 70 управления, который в примерах вариантов осуществления представляет собой пульт дистанционного управления. Блок 70 управления соединен кабелем или без кабеля с устройством 60 управления манипуляционного устройства 10. Посредством блока 70 управления оператор может управлять манипуляционным устройством 10. В соответствии с примером варианта осуществления, представленным на Фиг. 1, непосредственно на корпусе 18 отсутствует пульт оператора, стойка управления или аналогичное устройство. Пригодность манипуляционного устройства 10 к дистанционному управлению имеет преимущество, заключающееся в том, что оператор может управлять манипуляционным устройством 10 с безопасного расстояния. Кроме того, оператор может свободно располагаться для получения хорошего обзора текущего применения манипуляционного устройства 10.
[0077] Со ссылкой на Фиг. 2 и дополнительной ссылкой на Фиг. 3 изображено и более подробно описано съемное приспособление, обозначенное номером 100, для манипуляционного устройства 10.
[0078] Съемное приспособление 100 выполнено в виде устройства для обработки стен или потолков с удалением или сглаживанием материала. Обработка может включать в себя шлифование, фрезерование, полирование, обработку бучардой и/или сглаживание. Как указано выше, термин "стена" может включать в себя как боковые стенки, по существу проходящие в вертикальном направлении, так и потолочные стенки, по существу проходящие в горизонтальном направлении.
[0079] Съемное приспособление 100 содержит обрабатывающую головку 102, которая также может называться рабочей головкой. Обрабатывающая головка 102 расположена на дальнем от центра конце съемного приспособления 100. На ближнем к центру конце съемного приспособления 100 расположен монтажный блок 104, который обращен от него. Монтажный блок 104 выполнен с возможностью поддержания съемного приспособления на монтажном соединительном узле 38 манипуляционного устройства 10, см. Фиг. 1 и Фиг. 3.
[0080] Между монтажным блоком 104 и обрабатывающей головкой 102 расположено компенсационное устройство 106. По меньшей мере в соответствии с примером варианта осуществления, показанным на Фиг. 2, обрабатывающая головка 102 соединена с компенсационным устройством 106 посредством шарнирного соединения 108. Шарнирное соединение 108 также может быть описано как карданный подвес. Кроме того, обеспечен блок управления, обозначенный номером 110, который выполнен в качестве компонента съемного приспособления 100.
[0081] Как уже упоминалось выше, по меньшей мере некоторые из вариантов осуществления выполнены с возможностью обеспечения как можно меньшего количества соединительных узлов или отсутствия соединительных узлов для обмена информацией и/или управляющими командами между манипуляционным устройством 10 и съемным приспособлением 100. Это повышает гибкость, съемное приспособление 100 может быть использовано с различными манипуляционными устройствами 10 без необходимости сложных преобразований и т.п.
[0082] Со ссылкой на Фиг. 2 и дополнительной ссылкой на Фиг. 3-8 более подробно описаны компоненты и функции съемного приспособления 100.
[0083] Монтажный блок 104 содержит опору 116, которая адаптирована к монтажному соединительному узлу 38 манипуляционного устройства 10. Опора 116 обеспечивает возможность прикрепления съемного устройства 100 к монтажному соединительному узлу 38. Кроме того, монтажный блок 104 содержит поворотный подшипник 118, который образует центр вращения для диска 120, который несет опору(-ы) 116.
[0084] Диск 120 содержит распределенные по окружности стопорные углубления 122, которые определяют разделение диска 120. Кроме того, съемное приспособление 100 оснащено удерживающими элементами 124, которые взаимодействуют со стопорными углублениями 122 для обеспечения текущего углового положения диска 120 относительно съемного приспособления 100. Поворотный подшипник 118 обеспечивает ось 126 поворота для опоры 116 вместе с диском 120. В связи с этим на Фиг. 4 в качестве примера показаны поворотные перемещения между диском 120 с опорой 116 и съемным приспособлением 100 посредством изогнутой двойной стрелки 128.
[0085] Обрабатывающая головка 102 содержит по меньшей мере один держатель 130 инструмента, который может быть оснащен инструментом. В примере варианта осуществления, показанном на Фиг. 2, обеспечены три пластинчатых держателя 130 инструментов, которые расположены внутри кольца. Само собой разумеется, что иным образом сконструированные обрабатывающие головки могут содержать только один держатель 130 инструмента или несколько держателей 130 инструмента. Для приведения в действие инструментов, расположенных по меньшей мере на одном держателе 130 инструмента, обеспечен привод 132, который выполнен в виде гидравлического привода или электрического привода. Кроме того, в качестве примера, для уменьшения образования пыли во время механической обработки обеспечена система 134 удаления пыли.
[0086] В зависимости от варианта применения съемное приспособление 100 может быть использовано для сухой обработки или для влажной обработки путем добавления жидкости для связывания пыли. Соответственно, в дополнение или в качестве альтернативы системе 134 удаления пыли может быть обеспечена система подачи жидкости, которая, например, подает воду в точку механической обработки.
[0087] На Фиг. 3, а также на Фиг. 6 рабочая плоскость обозначена номером 136. При использовании съемного приспособления 100 для механической обработки поверхностей рабочую плоскость 136 выравнивают как можно ближе к параллельному положению относительно соответствующей рабочей поверхности.
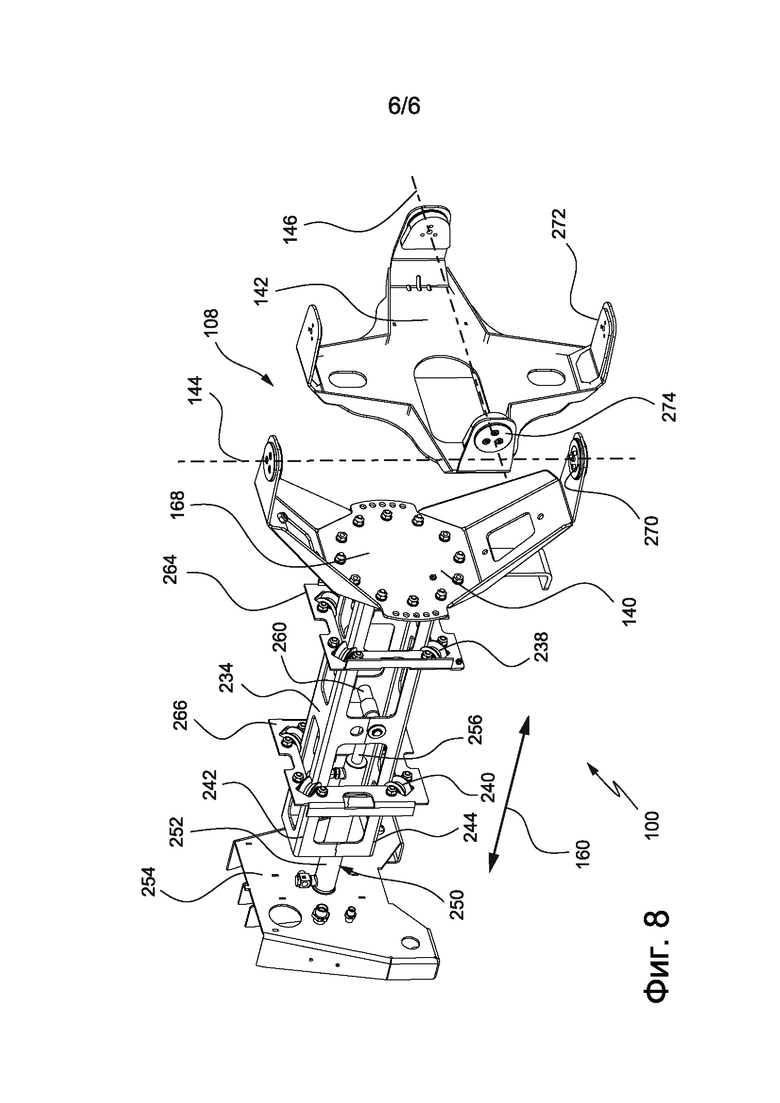
[0088] Конструкция шарнирного соединения 108 описана более подробно со ссылкой на Фиг. 2, 6, 7 и 8. Шарнирное соединение 108 содержит первый опорный кронштейн 140 и второй опорный кронштейн 142. Первый опорный кронштейн 140 обеспечивает ось 144 поворота для второго опорного кронштейна 142, см. Фиг. 6 и Фиг. 8. Второй опорный кронштейн 142 установлен с возможностью поворота на первом опорном кронштейне 140. Второй опорный кронштейн 142 обеспечивает ось 146 поворота для обрабатывающей головки 102. Обрабатывающая головка 102 установлена с возможностью поворота на втором опорном кронштейне 142.
[0089] Оси 144, 146 поворота опорных кронштейнов 140, 142 перпендикулярны друг другу. В примере варианта осуществления, показанном на Фиг. 6, две оси поворота пересекаются. Опорные кронштейны 140, 142 обеспечивают карданный подвес обрабатывающей головки 102. Это обеспечивает возможность компенсационных перемещений, так что рабочая плоскость 136 может быть выровнена параллельно обрабатываемой поверхности с высокой точностью при текущем контактном давлении.
[0090] На Фиг. 6 смещающие элементы 148, 150 изображены в виде пружин. Смещающие элементы 148, 150 смещают обрабатывающую головку 102 в шарнирном соединении 108 в требуемое положение. По меньшей мере один соответствующий смещающий элемент 148 расположен между опорным кронштейном 140 и опорным кронштейном 142. По меньшей мере еще один смещающий элемент 150 расположен между опорным кронштейном 142 и обрабатывающей головкой 102. Возможно попарное противоположное расположение соответствующих смещающих элементов 148, 150. По меньшей мере один смещающий элемент 148 смещает опорный кронштейн 142 в требуемое положение относительно опорного кронштейна 140. По меньшей мере один смещающий элемент 150 смещает обрабатывающую головку 102 в требуемое положение относительно опорного кронштейна 142.
[0091] На Фиг. 2 двойная стрелка, обозначенная номером 160, обозначает продольное направление съемного приспособления 100 и/или компенсационного устройства 106. Компенсационное устройство 106 определяет продольную ось для соответствующего перемещения между обрабатывающей головкой 102 и монтажным блоком 104. Это перемещение (компенсирующие перемещения) происходит вдоль продольной оси в продольном направлении 160.
[0092] Текущее положение обрабатывающей головки 102 указано индикатором 162. Индикатор 162 содержит указатель 164 и шкалу 166. В примере варианта осуществления, показанном на Фиг. 2, указатель 164 расположен на пластине 108 основания шарнирного соединения 108. Пластина 168 основания представляет собой компонент опорного кронштейна 140 или прочно соединена с ним. Следовательно, когда обрабатывающую головку 102 выдвигают или отводят в продольном направлении 160, указатель 164 совершает такое же перемещение. Шкала 166, например, прикреплена к корпусу 170 компенсационного устройства 106. Шкала 166 может содержать количественную информацию и качественную информацию. Качественная информация может включать в себя цветовые поля и т.п.
[0093] Шкала 166 изображает рабочий диапазон 172 (Фиг. 6), в котором обеспечено функционирование съемного приспособления 100. В рабочем диапазоне 172 обеспечено нахождение значения контактного давления обрабатывающей головки 102 в требуемом целевом диапазоне. Кроме того, на индикаторе 162 оператор может с определенного расстояния считывать показания, находится ли обрабатывающая головка 102 в предпочтительном рабочем положении по отношению к монтажному блоку 104 и, таким образом, к манипуляционному устройству 10. В частности, когда съемное приспособление 100 может работать в разных ориентациях, может быть обеспечено множество индикаторов 162 для облегчения получения информации о положении.
[0094] На Фиг. 3 изображено съемное приспособление 100 на монтажном соединительном узле 38 манипуляционного устройства 10 в собранном состоянии. Манипуляционное устройство 10 на Фиг. 3 установлено для обработки потолка. Съемное приспособление 100 установлено в вертикальной ориентации на стреле-манипуляторе 30, причем рабочая плоскость 136 обрабатывающей головки 102 расположена параллельно плоской поверхности потолка. В состоянии согласно Фиг. 3 манипуляционное устройство 10 должно не только удерживать съемное приспособление 10, но и обеспечивать дополнительную опору таким образом, чтобы можно было приложить силу 176 контактного давления.
[0095] При работе съемного приспособления 100 требуется значительное контактное давление, которое следует прикладывать как можно более постоянно. На Фиг. 3 стрелка, обозначенная номером 176, изображает соответствующее контактное давление. Контактное давление 176 прикладывают при помощи компенсационного устройства 106. Кроме того, компенсационное устройство 106 передает противодействующую силу 178, которую должна принимать на себя или выдерживать стрела-манипулятор 30 манипуляционного устройства 10. Необходимая для этого удерживающая сила обозначена номером 180 на Фиг. 3.
[0096] На Фиг. 3 представлена траектория 184 механической обработки, показывающая горизонтальное перемещение обрабатывающей головки 102 вдоль обрабатываемой поверхности. Во время механической обработки непременно возникают колебания положения и другие переменные возмущения, которые могут приводить к отклонениям в результирующем контактном давлении 176. Компенсационное устройство 106 выполнено с возможностью обеспечения как можно более постоянного контактного давления 176, даже если требуются компенсирующие перемещения, см. двойную стрелку 186 на Фиг. 3. Такие компенсирующие перемещения могут быть использованы, например, для реагирования на колебания положения или на определенную величину податливости стрелы-манипулятора 30 манипуляционного устройства 10. Величина компенсирующего перемещения 186 может быть легко считана с индикатора 162.
[0097] Поворот соединительного узла 38 съемного приспособления вокруг оси 48 поворота позволяет достичь и поддерживать требуемую ориентацию съемного приспособления 100 относительно обрабатываемой поверхности (например, стены или потолка). Это может быть сделано независимо от фактической ориентации секции 36 стрелы-манипулятора (Фиг. 1) относительно этой поверхности. Таким образом, может быть обеспечено выравнивание обрабатывающей головки 102 как можно ближе к параллельному положению относительно соответствующей поверхности. Это также применимо, когда съемное приспособление 100 перемещается вдоль обрабатываемой поверхности при помощи стрелы-манипулятора 30 манипуляционного устройства 10.
[0098] На Фиг. 4 изображены различные возможные ориентации для съемного приспособления 100 с точки зрения монтажного соединительного узла 38 манипуляционного устройства 10. На Фиг. 4 позиция 190 обозначает ориентацию для механической обработки правой стенки. Позиция 192 обозначает со ссылкой на пунктирное изображение ориентацию для механической обработки левой стенки. Позиция 194 обозначает ориентацию для механической обработки потолочной стенки. Изогнутая двойная стрелка 128 на Фиг. 4 показывает, что диск 120 с опорой 116 может поворачиваться вокруг поворотного подшипника 118 монтажного блока 104, причем стопорные углубления 122 определяют различные стопорные положения для удерживающих элементов 124. Шаг может составлять приблизительно 90° (градусов). Само собой разумеется, что также возможны промежуточные шаги, такие как приблизительно 45°. Такая ориентация в принципе возможна в связи с механической обработкой наклонных стенок.
[0099] Со ссылкой на Фиг. 5, а также с дополнительной ссылкой на Фиг. 3 и Фиг. 4 показаны различные варианты применения установленного съемного приспособления 100 для механической обработки поверхностей. На Фиг. 5 показан вид в перспективе помещения с полом 198, правой стенкой 200, левой стенкой 202, задней стенкой 204 и потолочной стенкой или верхней стенкой 206. Съемное приспособление 100 выполнено с возможностью обработки боковых стенок 200, 202, 204. Это может потребовать перемещения манипуляционного устройства 10 для приблизительного выравнивания. Кроме того, съемное приспособление 100 может быть использовано для механической обработки верхней стенки 206. В принципе, также можно обрабатывать и нижнюю стенку 198, но это не главное применение.
[00100] Например, правая стенка 200 образует плоскую поверхность 208, которая должна быть обработана как можно более полно и равномерно. Пунктирная кривая, обозначенная номером 210, в очень упрощенной форме изображает возможную траекторию механической обработки или соответствующую траекторию движения съемного приспособления 100.
[00101] С точки зрения оператора манипуляционного устройства 10, которое удерживает съемное приспособление 100, фактическая обработка происходит соответственно в одной плоскости, так что не обязательно должны быть использованы все имеющиеся степени свободы манипуляционного устройства 10. Кроме того, съемное приспособление 100 должно направляться манипуляционным устройством 10 как можно ближе к параллельному положению относительно соответствующей стенки 200, 202, 204, 206. Однако по меньшей мере в варианте осуществления, представленном на Фиг. 1 и 3, манипуляционное устройство 10 содержит кинематическую цепь, которая конструктивно не идеально сконфигурирована для таких перемещений в одной плоскости. Если бы сам оператор должен был обеспечивать соответствующую аппроксимацию перемещения, это привело бы к значительно более высоким усилиям со стороны оператора и, в конечном итоге, к гораздо большим отклонениям и колебаниям контактного давления.
[00102] По этой причине устройство 60 управления манипуляционного устройства 10 выполнено, по меньшей мере в соответствии с примерами вариантов осуществления, с возможностью работы в вертикальном режиме и/или горизонтальном режиме. В соответствующем режиме устройство 60 управления обеспечивает нахождение в требуемой плоскости, параллельной обрабатываемой стене, если это возможно, так что усилия по управлению со стороны оператора значительно уменьшены. Если возможно, оператор должен управлять только простым перемещением в двухмерном пространстве, см. траекторию 210 обработки на Фиг. 5. Это значительно уменьшает колебания давления, возникающие в контактном давлении. Механическая обработка может быть выполнена с высокой степенью равномерности и соответственно хорошими результатами.
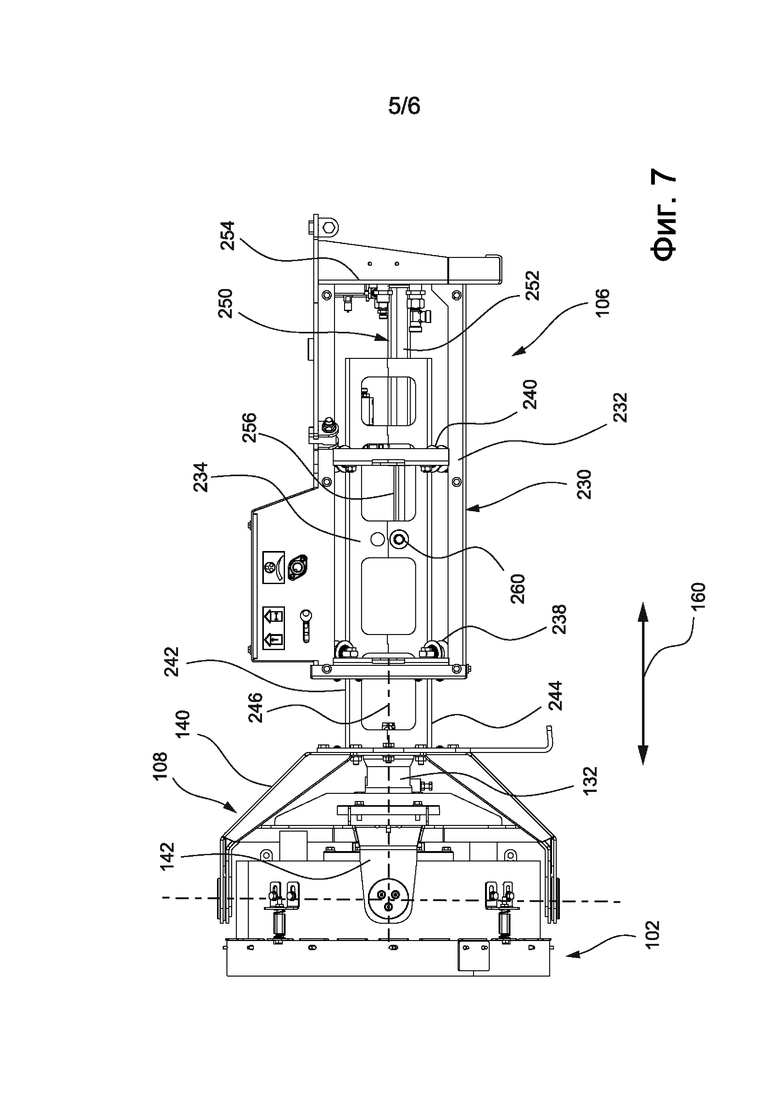
[00103] На Фиг. 6 и Фиг. 7 изображены виды сбоку съемного приспособления 100. На Фиг. 8 дополнительно показан вид в перспективе в частично разобранном состоянии.
[00104] На Фиг. 6 показано, что блок 110 управления съемного приспособления 100 может содержать разные простые элементы управления. В качестве примера, с помощью селекторного переключателя 214 можно переключаться между обработкой боковых стенок и обработкой потолка. При обработке потолка компенсационное устройство 106 должно учитывать собственный вес съемного приспособления 100 иным образом, чем при обработке боковых стенок.
[00105] Кроме того, номер 216 обозначает регулятор скорости, который управляет скоростью механической обработки, такой как угловая скорость и/или скорость вращения, по меньшей мере одного держателя 130 инструмента. Относительная скорость между инструментом и обрабатываемой поверхностью зависит от типа механической обработки и материала стенки. Предпочтительно, чтобы блок 110 управления по меньшей мере в примерах вариантов осуществления не содержал дополнительных элементов управления. Это дополнительно упрощает работу. Во время работы съемного приспособления 100 оператору не нужно управлять элементами управления блока 110 управления.
[00106] Во время работы индикатор 162 обеспечивает обратную связь о текущем компенсирующем перемещении компенсационного блока 106. Если возможно, указатель 164 располагают в нулевом или нейтральном положении шкалы 166. Это означало бы, что приложено требуемое контактное давление, и что компенсирующее перемещение не требуется. Из этого нулевого положения в продольном направлении 160 могут быть выполнены компенсирующие перемещения для реагирования, например, на изменения расстояния между установочным соединительным узлом 38 стрелы-манипулятора 30 манипуляционного устройства 10 и обрабатываемой поверхностью. Если присутствуют только умеренные компенсирующие перемещения, то компенсационное устройство может поддерживать контактное давление в пределах целевой области. Отсутствует необходимость прерывания механической обработки, и сохраняется равномерность механической обработки. Только в случае возникновения чрезмерных компенсирующих перемещений оператор должен прервать процесс механической обработки, например, для приблизительного выравнивания манипуляционного устройства 10.
[00107] Компенсирующее перемещение обеспечивается компенсационным устройством 106. На Фиг. 7 показано компенсационное устройство 106 в состоянии, в котором корпус 170 не показан в иллюстративных целях. Компенсационное устройство 106 содержит направляющую 230. Направляющая 230 содержит направляющую раму 232 и профильную каретку 234, которая установлена в раме с возможностью перемещения. Между направляющей рамой 232 и профильной кареткой 234 расположены ролики 238, 240, см. Фиг. 8. Ролики 238, 240 в качестве примера выполнены в виде профильных роликов и приспособлены к продольным краям профильной каретки 234 на направляющих поверхностях 242, 244.
[00108] Отведение и выдвижение профильной каретки 234 происходит вдоль продольной оси 246, которая также определяет продольное направление 160. Вдоль продольной оси 246 возможны компенсирующие перемещения для поддержания как можно более постоянного контактного давления или контактной силы. Компенсирующее перемещение или компенсация контактного давления выполняется рабочим цилиндром 250, который также относится к компенсационному устройству 106. Рабочий цилиндр 250 расположен внутри направляющей 230 и параллельно продольной оси 246. Рабочий цилиндр 250 содержит корпус 252 цилиндра, поддерживаемый на пластине 254 основания на ближнем к центру конце компенсационного устройства 106. Кроме того, рабочий цилиндр 250 содержит поршневой шток 256, который взаимодействует с поперечиной 260 и, таким образом, с профильной кареткой 234. Корпус 252 цилиндра соединен с направляющей рамой 232. Поршневой шток 256 соединен с профильной кареткой 234. Соответственно, перемещение поршневого штока 256 относительно корпуса 252 цилиндра вызывает продольное перемещение между профильной кареткой 234 и направляющей рамой 232.
[00109] Для рабочего цилиндра 250 обеспечено управление давлением, которое осуществляет, например, блок 110 управления. Управление давлением встроено в съемное приспособление и предпочтительно не зависит от манипуляционного устройства 10. Однако манипуляционное устройство 10 обеспечивает подачу рабочей среды под давлением.
[00110] Перспективное изображение на Фиг. 8 ясно показывает, что направляющие ролики 238, 240 установлены на направляющих стенках 264, 266, которые смещены относительно друг друга. Направляющие стенки 264, 266 соединены с направляющей рамой 232.
[00111] Дальний от центра конец профильной каретки 234 соединен с пластиной 168 основания. Соответственно, первый опорный кронштейн 140 жестко прикреплен к профильной каретке 234. На Фиг. 8 показан второй опорный кронштейн 142 в разобранном разъединенном состоянии. Ось 144 поворота обеспечена между первым опорным кронштейном 140 и вторым опорным кронштейном 142. Кроме того, второй опорный кронштейн 142 обеспечивает ось 146 поворота для обрабатывающей головки 102 (не показана на Фиг. 8).
[00112] Опорный кронштейн 140 содержит боковые опорные рычаги 270. Опорный кронштейн 142 содержит первые опорные рычаги 272 и вторые опорные рычаги 274. Опорные рычаги 272 относятся к опорным рычагам 270 опорного кронштейна 140. Опорные рычаги 274 используют для поддержки обрабатывающей головки 102. Вместе опорные рычаги 270 и 272 образуют ось 144 поворота. Опорные рычаги 274 образуют ось 146 поворота. В целом, конструкция шарнирного соединения 108, изображенного в настоящей заявке, обеспечивает возможность простого выравнивания и адаптации обрабатывающей головки 102 относительно обрабатываемой поверхности. Это поддерживает требуемое параллельное выравнивание.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Опорное устройство робота манипуляционного промышленного (варианты) | 2021 |
|
RU2756901C1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| СЪЕМНЫЙ УЗЕЛ ПРИЖИМНОГО ЭЛЕМЕНТА И МЕХАНИЗМ ОБРАТНОЙ ЛОПАТЫ С ТАКИМ УЗЛОМ | 2010 |
|
RU2594398C2 |
| Приспособление для разметки | 1990 |
|
SU1749015A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| УСТРОЙСТВО И СПОСОБ УДАЛЕНИЯ ОБЛОМКОВ ИЗ СКВАЖИННОГО ФЛЮИДА В СТВОЛЕ СКВАЖИНЫ | 2011 |
|
RU2534175C2 |
| ВЕНТИЛЯТОР В СБОРЕ, СОДЕРЖАЩИЙ КОЛЬЦЕВОЕ СОПЛО И ПОТОЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2011 |
|
RU2575208C2 |
| УСОВЕРШЕНСТВОВАНИЯ БУРОВОГО УСТРОЙСТВА | 2004 |
|
RU2333333C2 |
| Мобильная буровая установка | 2016 |
|
RU2647522C2 |
Группа изобретений относится к устройствам для обработки стен и потолков и может быть использована при обработке бетона, натурального камня, штукатурки и других материалов с удалением или сглаживанием материала. Съемное приспособление (100) для передвижного манипуляционного устройства (10) содержит монтажный блок (104), выполненный с возможностью опоры на указанный соединительный узел (38), обрабатывающую головку (102), содержащую по меньшей мере один инструмент, и компенсационное устройство (106), расположенное между монтажным блоком (104) и обрабатывающей головкой (102) и задающее продольную ось (246). Обрабатывающая головка (102) выполнена с возможностью перемещения относительно монтажного блока (104) в продольном направлении (160) вдоль продольной оси (246). Компенсационное устройство (106) выполнено с возможностью обеспечения заданной силы контактного давления, прикладываемой обрабатывающей головкой (102) к обрабатываемой поверхности в заданном рабочем диапазоне (172) вдоль продольной оси (246). Приведена конструкция соответствующего манипуляционного устройства (10). Повышается производительность обработки материалов и качество обработанной поверхности. 3 н. и 17 з.п. ф-лы, 8 ил.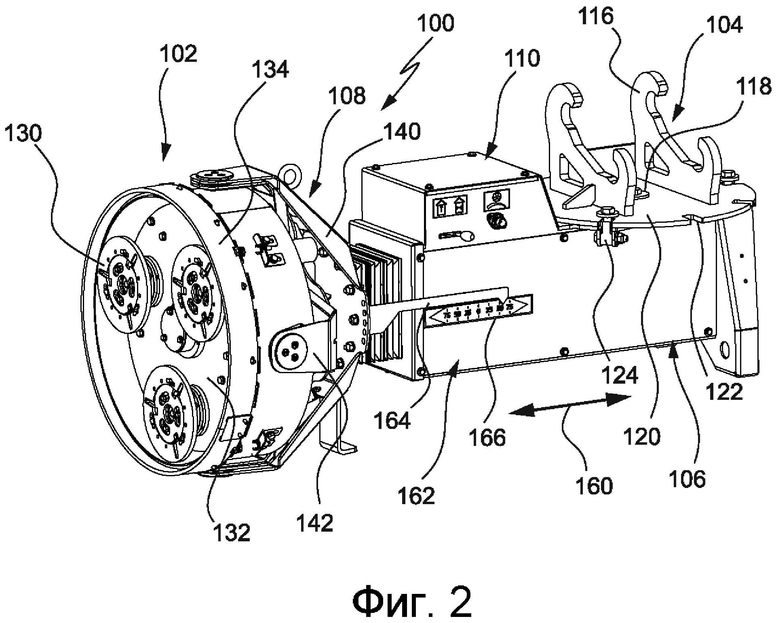
1. Съемное приспособление для обработки стен или потолков с удалением или сглаживанием материала для передвижного манипуляционного устройства (10), причем съемное приспособление (100) содержит:
- монтажный блок (104), выполненный с возможностью установки на монтажный соединительный узел (38) манипуляционного устройства (10),
причем монтажный блок (104) выполнен с возможностью обеспечения по меньшей мере двух смещенных относительно друг друга поворотных положений (190, 192, 194) для съемного приспособления (100), и
- обрабатывающую головку (102), выполненную с возможностью оснащения по меньшей мере одним инструментом для обработки с удалением или сглаживанием материала,
отличающееся тем, что оно снабжено
компенсационным устройством (106), расположенным между монтажным блоком (104) и обрабатывающей головкой (102) и задающим продольную ось (246),
причем обрабатывающая головка (102) выполнена с возможностью перемещения относительно монтажного блока (104) в продольном направлении (160) вдоль продольной оси (246), а
компенсационное устройство (106) выполнено с возможностью обеспечения заданной силы контактного давления, прикладываемой обрабатывающей головкой (102) к обрабатываемой поверхности в заданном рабочем диапазоне (172) вдоль продольной оси (246), причем в рабочем диапазоне (172) компенсационного устройства (106) обеспечена возможность компенсирующих перемещений вдоль продольной оси (246) с абсолютной величиной по меньшей мере 200 мм.
2. Съемное приспособление по п.1, в котором компенсационное устройство (106) выполнено с возможностью обеспечения компенсации в рабочем диапазоне (172) изменения положения соединительного узла (38) съемного приспособления манипуляционного устройства (10) вдоль продольной оси (246).
3. Съемное приспособление по п.1 или 2, в котором в рабочем диапазоне (172) компенсационного устройства (106) обеспечена возможность компенсирующих перемещений вдоль продольной оси (246) с абсолютной величиной по меньшей мере 300 мм, более предпочтительно по меньшей мере 400 мм.
4. Съемное приспособление по одному из пп.1-3, в котором компенсационное устройство (106) выполнено с возможностью работы в первом рабочем режиме и по меньшей мере в одном втором рабочем режиме,
причем первый рабочий режим предназначен для вертикальной ориентации продольной оси (246), а по меньшей мере один второй рабочий режим предназначен для горизонтальной ориентации продольной оси (246).
5. Съемное приспособление по одному из пп.1-4, в котором компенсационное устройство (106) выполнено с возможностью управления таким образом, чтобы обеспечивать по существу постоянное контактное давление в рабочем диапазоне (172),
причем результирующее контактное давление в рабочем диапазоне (172) предпочтительно способно изменяться максимум на 15%, более предпочтительно максимум на 10% и еще более предпочтительно максимум на 5%.
6. Съемное приспособление по одному из пп.1-5, в котором компенсационное устройство (106) содержит по меньшей мере один рабочий цилиндр (250), проходящий в продольном направлении (160),
причем рабочий цилиндр (250) выполнен с возможностью соединения с источником (64) подачи рабочей среды под давлением манипуляционного устройства (10), а регулирование фактического давления в рабочем цилиндре (250) при текущем давлении подачи обеспечено за счет регулирования давления, предусмотренного в самом съемном приспособлении (100).
7. Съемное приспособление по одному из пп.1-6, в котором компенсационное устройство (106) дополнительно содержит продольную направляющую (230) для обрабатывающей головки (102), обеспечивающую направление перемещения обрабатывающей головки (102) в продольном направлении (160) независимо от текущей ориентации съемного приспособления (100).
8. Съемное приспособление по п.7, в котором продольная направляющая (230) выполнена в виде роликовой направляющей.
9. Съемное приспособление по п.7 или 8, в котором продольная направляющая (230) содержит направляющую раму (232), в которой расположена профильная каретка (234), выполненная с возможностью перемещения относительно направляющей рамы (232) и опирающаяся на направляющую раму (232), причем на одном конце профильной каретки (234) расположена обрабатывающая головка (102).
10. Съемное приспособление по одному из пп.1-9, в котором компенсационное устройство (106) дополнительно содержит визуальный индикатор (162) для визуализации текущего рабочего положения обрабатывающей головки (102) в рабочем диапазоне (172).
11. Съемное приспособление по одному из пп.1-10, в котором обрабатывающая головка (102) соединена с одним концом компенсационного устройства (106) посредством шарнирного соединения (108) и в котором обеспечен по меньшей мере один смещающий элемент (148, 150), обеспечивающий смещение обрабатывающей головки (102) к требуемой ориентации.
12. Съемное приспособление по п.11, в котором шарнирное соединение (108) выполнено в виде карданного шарнирного соединения, обеспечивающего две оси (144, 146) поворота, которые ориентированы перпендикулярно друг другу и перпендикулярно продольной оси (246).
13. Съемное приспособление по любому из пп.1-12, в котором передвижное манипуляционное устройство (10) представляет собой передвижную рабочую машину (12).
14. Передвижное манипуляционное устройство (10), содержащее:
- ходовую часть (14), содержащую ходовой привод (62),
- корпус (18), поддерживающий управляемую стрелу-манипулятор (30),
- блок (64) подачи рабочей среды под давлением и
- устройство (60) управления,
отличающееся тем, что оно содержит съемное приспособление для обработки стен или потолков с удалением или сглаживанием материала, выполненное по одному из пп.1-13,
причем съемное приспособление (100) размещено на соединительном узле (38) съемного приспособления на стреле-манипуляторе (30),
компенсационное устройство (106) снабжено рабочей средой под давлением при помощи блока (64) подачи рабочей среды под давлением,
устройство (60) управления выполнено с возможностью направления съемного приспособления (100) в заданной ориентации относительно стены (200, 202, 204) или потолка (206) и позиционирования соединительного узла (38) съемного приспособления в заданном диапазоне расстояний от стены (200, 202, 204) или потолка (206) во время движения подачи съемного приспособления (100) вдоль стены (200, 202, 204) или потолка (206), управляемого посредством команд оператора, а
компенсационное устройство (106) выполнено с возможностью обеспечения силы контактного давления, прикладываемой обрабатывающей головкой (102) к обрабатываемой поверхности, причем съемное приспособление (100) опирается на манипуляционное устройство (10).
15. Манипуляционное устройство (10) по п.14, в котором корпус (18) выполнен с возможностью поворота относительно ходовой части (14),
при этом стрела-манипулятор (30) содержит первую секцию (32) стрелы-манипулятора, вторую секцию (34) стрелы-манипулятора и третью секцию (36) стрелы-манипулятора, которые образуют разомкнутую кинематическую цепь и выполнены с возможностью поворота относительно друг друга,
причем первая секция (32) стрелы-манипулятора установлена с возможностью поворота на корпусе (18), а третья секция (36) стрелы-манипулятора поддерживает монтажный соединительный узел (38), который расположен с возможностью поворота на третьей секции (36) стрелы-манипулятора,
причем оси (42, 44, 46, 48) поворота секций (32, 34, 36) стрелы-манипулятора (30) соответственно ориентированы параллельно друг другу и перпендикулярно оси (22) поворота корпуса (18) относительно ходовой части (14),
причем приводы (20, 50, 52, 54, 56) связаны с осями (42, 44, 46, 48) поворота и осью (22) поворота и выполнены с возможностью управления посредством устройства (60) управления.
16. Манипуляционное устройство (10) по п.14 или 15, в котором монтажный соединительный узел (38) выполнен с возможностью поворота вокруг оси (48) поворота, предпочтительно относительно третьей секции (36) стрелы-манипулятора, для обеспечения параллельной ориентации обрабатывающей головки (102) относительно стены (200, 202, 204) или потолка (206).
17. Манипуляционное устройство (10) по п.15 или 16, в котором устройство (60) управления выполнено с возможностью работы по меньшей мере в горизонтальном режиме или в вертикальном режиме,
причем устройство (60) управления в горизонтальном режиме обеспечивает управление приводами манипуляционного устройства (10) таким образом, что обеспечено перемещение съемного приспособления (100) по горизонтальной траектории, и устройство (60) управления в вертикальном режиме обеспечивает управление приводами манипуляционного устройства (10) таким образом, что обеспечено перемещение съемного приспособления (100) по вертикальной траектории.
18. Манипуляционное устройство (10) по п.17, в котором устройство (60) управления предпочтительно обеспечивает возможность перемещений съемного приспособления (100) в горизонтальной плоскости в горизонтальном режиме и обеспечивает возможность перемещений съемного приспособления (100) в вертикальной плоскости в вертикальном режиме.
19. Манипуляционное устройство (10) по одному из пп.14-18, которое представляет собой передвижную рабочую машину (12).
20. Применение съемного приспособления для обработки стен или потолков с удалением или сглаживанием материала для манипуляционного устройства (10) по одному из пп.1-12 в качестве съемного приспособления для манипуляционного устройства (10) в виде дистанционно управляемой передвижной рабочей машины (12), при этом указанное съемное приспособление (100) выполнено с возможностью работы независимо от управляющих команд, подаваемых манипуляционным устройством (10), и перемещения вдоль обрабатываемой поверхности.
| EP 2960014 A3, 11.05.2016 | |||
| CN 107336098 A, 10.11.2017 | |||
| Приспособление для погружения в почву грунтоноса | 1941 |
|
SU68413A1 |
| US 2015290761 A1, 15.10.2015 | |||
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ КАК СИСТЕМОЙ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 2004 |
|
RU2275297C1 |

