Изобретение относится к области грузоподъемного оборудования, а именно к крано-манипуляторным установкам для выполнения, преимущественно в составе специализированных подъемно-транспортных средств, погрузочно-разгрузочных и монтажных работ.
Известен ряд аналогов изобретения, как отечественной, так и зарубежной разработки (см. например, RU 2037464, В 66 С 23/10, 19.06.65 г., RU 2107655C1, В 66 С 23/86. 27.03.98 г., RU 2167803 C2, В 66 С 23/00, 27.05.99 г., а также гидравлические стреловые самоходные краны общехозяйственного и военного назначения КМЦ-10, КС-6874, КС-557Кр Одесского ОАО “Краян”, КС-45716, КС-6476-1 Камышинского ОАО “Газакс”, КС-3574М Ивановского ОАО “Автокран”, бортовое крановое устройство японской фирмы "Tadano", гидравлический автомобильный кран 4056 и LTM 1030 немецкой фирмы Liebherr, общие виды которых приведены соответственно на тыльной стороне титульного листа обложки и стр.19 журнала “Строительные и дорожные машины” №3 за 1996 год, тыльной стороне титульного листа обложки журнала “Строительные и дорожные машины” №4 за 1996 год, стр.8 того же журнала №8 за 1998 год, рис.16 стр.75 книги М.И.Гриффа, Р.А.Затвана, В.Ф.Трофименкова “Автотранспортные средства с грузоподъемными устройствами для перевозки грузов в контейнерах и пакетах”, М., “Транспорт”, 1989 г., УДК 629.114.4:656.135.073.235, рис.33а стр.47 книги Александрова М.П. “Подъемно-транспортные машины”: Учебник для вузов. - 5-е изд., перераб. и доп. - М.: “Высшая школа”, 1979. ББК 39.9. А46, УДК 621.86/87 (075.8), рис.1 стр.12 журнала “Строительные и дорожные машины” №10 за 1988 год и др.).
Первые из указанных аналогов (RU 2037464, RU 2107655C1, RU 2167803C2) представляют собой соответствующие крано-манипуляторные установки с многосекционными стрелами. При этом часть из входящих в состав таких стрел секций шарнирно сочленены между собой, а последняя из них обычно снабжается соответствующим телескопическим звеном с подвешиваемым на его конце рабочим органом, преимущественно управляемым по гидравлическому каналу, например, грейферного типа.
В составе такого рода крано-манипуляторных установок не имеется грузоподъемных лебедок, а подъем и продольное перемещение груза в вертикальной плоскости осуществляются только посредством соответствующих манипуляций, производимых стрелой.
К настоящему времени указанные установки нашли достаточно широкое применение в мировой практике, как в составе различного рода специализированных подъемно-транспортных средств, так и в качестве соответствующего стационарного грузоподъемного оборудования. В немалой степени этому способствовали их особые потребительские качества, а также значительный рост номенклатуры разрабатываемых для них соответствующих сменных рабочих органов навесного типа с гидравлическим приводом.
Однако большинство из известных крано-манипуляторных установок со стреловым оборудованием указанного типа достаточно сложны в конструктивном исполнении и имеют большую стоимость. К тому же из-за специфики конструктивного исполнения использование таких установок для выполнения ряда погрузочно-разгрузочных и монтажных работ, требующих проявления чрезвычайной осторожности и малой посадочной скорости, например, при перемещении взрывоопасных объектов, а также погрузке их в высокобортовые наземные транспортные средства и трюмы соответствующего водного транспорта и выгрузки из них весьма затруднительно либо вообще невозможно.
Указанные работы могут быть выполнены при помощи стреловых самоходных кранов с прямой многосекционной телескопической стрелой, оснащенных соответствующими гидравлическими грузоподъемными лебедками, на конце гибкого тягового органа которых закреплен крюк.
В отличие от вышеупомянутых крано-манипуляторных установок перемещение груза при помощи кранов такого типа может осуществляться как соответствующими подъемом, опусканием и телескопированием стрелы, так и грузоподъемной лебедкой.
Однако большинство из производимых в настоящее время промышленностью стреловых самоходных кранов общехозяйственного и военного назначения имеют большую грузоподъемность, достаточно сложное и пространственно развитое опорно-поворотное устройство с внешним расположением грузоподъемной лебедки на его поворотной части и прокладкой ее гибкого тягового органа снаружи, над или под стрелой, с использованием соответствующих отклоняющих роликов и ограничителей, многосекционную стрелу и оснащены приборами безопасности на основе микропроцессорной элементной базы, имеющими сложную разветвленную структуру технических средств и программное обеспечение. Управление ими осуществляется, как правило, из размещенной на поворотной части опорно-поворотного устройства кабины, а это связано с прямой угрозой жизни оператора при перемещении взрывоопасных предметов.
Вследствие своей громоздкости и большой массы входящие в состав стреловых самоходных кранов грузоподъемные устройства практически полностью занимают всю свободную часть шасси, предназначенных для их размещения транспортных средств с полным востребованием его несущей способности, делая тем самым невозможными одновременное размещение и транспортировку на них различного рода грузов, технологического и иного оборудования и инструмента.
Как показывают практические запросы соответствующих потребителей для перемещения ряда особо опасных грузов относительно небольших размеров и массы на сравнительно небольшие расстояния и выполнения отдельных монтажных работ использование такого рода сложных и дорогостоящих кранов нецелесообразно.
Такие работы с успехом могут быть выполнены при помощи компактных грузоподъемных установок с более простыми по схемно-конструктивному исполнению опорно-поворотным устройством, односекционной цельносварной стрелой необходимой длины с интегрированной в ее конструкцию малогабаритной гидравлической грузоподъемной лебедкой с однорогим крюком и соответствующими недорогими средствами безопасности электромеханического и гидравлического типов и дистанционным управлением.
Из числа известных аналогов заявляемого технического решения ближайшим (прототипом) может служить предназначенная для выполнения соответствующих погрузочно-разгрузочных и монтажных работ грузоподъемная установка из состава гидравлического автомобильного крана 4056, общий вид и описание которого приведены на рис.33а и стр.46-48 учебника для вузов Александрова М.П. “Подъемно-транспортные машины”, - 5-е изд., перераб. и доп. - М., “Высшая школа”, 1979, ББК 39.9, А46, УДК 621.86/87 (075.8).
Указанная установка содержит пространственно развитое опорно-поворотное устройство с механизмом поворота на основе зубчатой передачи и четырьмя выносными аутригерами, шарнирно закрепленную на ее поворотной части, с возможностью углового перемещения в вертикальной плоскости, односекционную цельносварную стрелу коробчатого сечения с приводным гидроцилиндром, хвостовик штока которого закреплен соответствующим образом в ее присоединителях, а корпус - в ушах указанной поворотной части, размещенные на последней снаружи гидравлическую грузоподъемную лебедку с однорогим крюком, подвешенным на конце намотанного на ее барабан гибкого тягового органа, проложенного над стрелой, с использованием соответствующих отклоняющих роликов и ограничителей, выводом его на установленный в головке стрелы свободно вращающийся концевой блок и запасовкой сходящей с него ветви через аналогичный блок подвижной крюковой обоймы на металлоконструкцию указанной головки по полиспастной схеме, гидросистему привода и управления механизмами и кабину крановщика, а также соответствующие средства безопасности, фары-прожекторы для освещения крюка и места проведения работ в темное время суток и электросистему, обеспечивающую функционирование размещаемого на опорно-поворотном устройстве и стреле электрооборудования, с соответствующей коммутационной и управляющей аппаратурой и кабельной проводкой.
Однако и ей присущи многие из вышеуказанных недостатков. Она также имеет пространственно развитое и массивное опорно-поворотное устройство и занимает практически всю свободную часть шасси используемого для ее размещения автомобиля. Размещение механизма поворота и гидравлической грузоподъемной лебедки снаружи, на внешней поверхности поворотной части опорно-поворотного устройства, не совсем рационально, поскольку способствует увеличению соответствующих габаритов указанной части и ухудшает внешний вид установки и условия их работы из-за прямого воздействия на них атмосферы окружающей среды. Открытая прокладка гибкого тягового органа гидравлической грузоподъемной лебедки над стрелой опасна, поскольку при аварийном обрыве его он может ударить непосредственно по стеклам смотровых окон кабины крановщика и др.
Задачей настоящего изобретения является упрощение конструкции заявляемой крано-манипуляторной установки и улучшение ее технико-эксплуатационных качеств.
В соответствии с изобретением поставленная задача достигается конкретной совокупностью существенных признаков заявляемой крано-манипуляторной установки.
К указанной совокупности существенных признаков, характеризующих заявляемую крано-манипуляторную, относятся:
- наличие в ней опорно-поворотного устройства, которое выполнено с соответствующим гидравлическим приводом и зубчатой передачей, одно из кинематических звеньев которой сформировано на поворотной части, а другое - на неподвижном рамном основании опорно-поворотного устройства;
- наличие в ее составе шарнирно закрепленной на поворотной части опорно-поворотного устройства с возможностью углового перемещения в вертикальной плоскости, односекционной цельносварной стрелы коробчатого сечения с приводным гидроцилиндром, хвостовик штока которого закреплен соответствующим образом в ее присоединителях, а корпус - в ушах указанной поворотной части;
- наличие в ней выносных аутригеров;
- наличие в ее составе гидравлической грузоподъемной лебедки с крюком, подвешенным на конце намотанного на ее барабан гибкого тягового органа, выведенного на установленный в головке стрелы свободно вращающийся концевой блок;
- наличие в ее составе гидросистемы;
- наличие в ней ограничителя высоты подъема крюка;
- наличие в ее составе ограничителя грузоподъемности лебедки;
- наличие в ней фар-прожекторов для освещения крюка и места проведения работ;
- наличие в ее составе электросистемы, обеспечивающей функционирование размещенного на опорно-поворотном устройстве и стреле электрооборудования, с соответствующей коммутационной и управляющей аппаратурой и кабельной проводкой;
- снабжение ее ограничителями величины предельного давления в гидроцилиндрах перемещения самоустанавливающихся опорных пят выносных аутригеров и грузового момента стрелы;
- снабжение ее противоперегрузочными устройствами механизма поворота опорно-поворотного устройства, стрелы и лебедки от действия на них динамических сил, возникающих при резком изменении скорости перемещения груза;
- снабжение ее индикатором наклона опорно-поворотного устройства;
- снабжение ее клаксоном для подачи предупредительных звуковых сигналов;
- снабжение ее индикаторами электрического типа степени засоренности сменных фильтроэлементов напорного и сливного фильтров очистки жидкости гидросистемы;
- размещение выносных аутригеров на выдвижных балках, которые связаны с рамным основанием опорно-поворотного устройства посредством гибких страховочных фалов, длина полупетель провисания которых не превышает рабочего хода указанных балок;
- выполнение опоры поворотной части опорно-поворотного устройства цельнолитой в виде трубы ступенчатой конфигурации из стали, обладающей хорошей свариваемостью с ее корпусом, а располагаемого на ней одного из кинематических звеньев зубчатой передачи механизма поворота - в виде, закрепляемой посредством запрессовки и дополнительного стопорения от проворота радиальными призонными штифтами, съемной цилиндрической втулки с соответствующим зубчатым венцом из высокопрочной закаленной стали;
- формирование в районе верхнего среза опоры поворотной части опорно-поворотного устройства пояса из двух разнесенных между собой по высоте внешних шпангоутов, замкнутых друг на друга дискретно расположенными в окружном направлении вертикальными ребрами;
- выполнение ушей поворотной части опорно-поворотного устройства с отверстиями в них под ось крепления корпуса приводного гидроцилиндра стрелы заодно целое с телом вышеупомянутого пояса опоры указанной части с пространственным размещением между его шпангоутами, охватывающими их с боков своими асимметрично развитыми в радиальном направлении плоскими ответвлениями, имеющими конфигурацию горизонтально ориентированных реброобразных подкосов;
- выполнение головки стрелы из двух разнесенных между собой в поперечном направлении и консольно закрепленных во внутренней полости корпуса с соответствующим перекрытием по длине плоских щек с наклоненными книзу проушинами с отверстиями под ось крепления в них вращающегося концевого блока, жестко замкнутых друг на друга при помощи расположенных между ними, в пределах их внешнего обвода, перемычек и охватывающего проушины спереди, в плоскости установки вращающегося концевого блока, скобообразного ограничителя бокового перемещения гибкого тягового органа грузоподъемной лебедки, с приваркой их по месту сопряжения с указанными щеками;
- формирование внутри тыльной части стрелы хвостового отсека со щелевым проемом между верхним срезом его передней стенки и потолочной полкой ее корпуса, снабженного перекрываемым съемной крышкой входным люком;
- встраивание присоединителей стрелы с отверстиями под ось крепления хвостовика штока ее приводного гидроцилиндра в боковые стенки корпуса стрелы за хвостовым отсеком с образованием вокруг них заглубленного вовнутрь и обращенного кверху дном кармана и щелевого проема между ним и потолочной полкой указанного корпуса, идентичного по проходному сечению, с аналогичным проемом в зоне расположения хвостового отсека;
- размещение грузоподъемной лебедки в хвостовом отсеке стрелы с жестким закреплением болтами на его днище, проводкой гибкого тягового органа напроход внутри корпуса последней через вышеупомянутые щелевые проемы и соответствующее сквозное отверстие в вертикально ориентированной задней перемычке ее головки и блокировкой в ручье вращающегося концевого блока посредством отклоняющего блокировочного пальцев, первый из которых установлен под гибким тяговым органом с возвышением над дном кармана и закреплением своими концами в боковых стенках корпуса стрелы, а второй - в головке последней, над вращающимся концевым блоком, с закреплением в отверстиях ее щек с возможностью свободного проворота вокруг собственной оси и формированием консольно выступающих из них наружу концов;
- выполнение гидросистемы по двухнасосной открытой схеме с основным регулируемым аксиально-поршневым и вспомогательным съемным насосами, с возможностью реализации комбинированного управления гидравлическим приводом зубчатой передачи механизма поворота, приводным гидроцилиндром стрелы и грузоподъемной лебедкой как дистанционно, по электрическому кабелю, с использованием дистанционного пульта поясного типа, так и в ручном режиме, для чего в ее состав включен соответствующий многосекционный золотниковый электрогидравлический распределитель, снабженный блоком встроенных в него управляющих электромагнитов и съемными механическими ручками перемещения его золотников, и только ручного управления гидроцилиндрами перемещения самоустанавливающихся опорных пят выносных аутригеров и переключением режимов работы с задействования последних на задействование гидравлического привода вышеуказанной передачи, приводного гидроцилиндра стрелы и грузоподъемной лебедки и обратно при помощи рукояток соответствующих гидравлических распределителей и трехходового крана с ручным управлением;
- прокладка соединительных гидравлических магистралей по кратчайшим трассам с формированием соответствующих слабин и дискретным закреплением их на металлоконструкции и обеспечением подачи рабочей жидкости от неподвижного рамного основания опорно-поворотного устройства к его поворотной части и обратно через центрально закрепленный на нижнем срезе полого корпуса указанного основания съемный блок одноканальных подвижных соединителей поворотного типа с одной степенью свободы;
- закрепление ограничителя высоты подъема крюка и грузоподъемной лебедки на одном из консольных концов установленного в головке стрелы блокировочного пальца с охватом его подвесным грузилом сходящей с вращающегося концевого блока, с самоориентацией по гравитационной вертикали, ветви ее гибкого тягового органа;
- выполнение ограничителей величины предельного давления в гидроцилиндрах перемещения самоустанавливающихся опорных пят выносных аутригеров, грузового момента стрелы и грузоподъемности лебедки в виде автономных предохранительных клапанов, один из которых установлен непосредственно перед гидравлическими распределителями управления гидроцилиндрами перемещения указанных опорных пят, а остальные интегрированы в соответствующие секции электрогидравлического распределителя гидросистемы по линиям питания поршневой полости приводного гидроцилиндра стрелы и гидромотора лебедки при вращении ее барабана на поднятие груза;
- выполнение вышеупомянутых противоперегрузочных устройств в виде автономных предохранительных клапанов, интегрированных в соответствующую секцию электрогидравлического распределителя гидросистемы по линиям питания гидравлического привода зубчатой передачи механизма поворота, а также установленного на входе в поршневую и штоковую полости приводного гидроцилиндра стрелы и встроенного непосредственно в гидросхему лебедки нормально закрытых тормозных клапанов с управляемыми запорными элементами, причем первый из указанных тормозных клапанов выполнен навесным и жестко закреплен посредством болтов на опорной плите переходно-стыковочного адаптера, неподвижно зафиксированного на корпусе приводного гидроцилиндра стрелы при помощи разъемных стяжных хомутов;
- установка фар-прожекторов для освещения крюка грузоподъемной лебедки и места проведения работ на корпусе поворотной части опорно-поворотного устройства и головке стрелы, с возможностью регулировки пространственного положения, причем размещенная на головке стрелы фара-прожектор жестко закреплена, с ориентацией лицевой поверхностью книзу, на другом из консольных концов ее блокировочного пальца, со стороны, противоположной расположению ограничителя высоты подъема крюка лебедки;
- выполнение кабельной проводки электросистемы по однопроводной схеме, с подсоединением отрицательных подводов от внешних источников тока к металлоконструкции опорно-поворотного устройства и стрелы, в виде совокупности разъемных кабельных вставок, в модульном исполнении, с соответствующими концевыми присоединителями, соединяющих электрооборудование, располагаемое на стреле и опорно-поворотном устройстве, с размещенной на рамном основании последнего коммутационной аппаратурой в блочном исполнении, снабженной присоединительными электроразъемами для подстыковки к ней кабелей питания от дистанционного пульта управления и источников тока, а также кабельных вставок от указанного электрооборудования, причем идущие от ограничителя высоты подъема крюка лебедки и установленной на головке стрелы фары-прожектора кабельные вставки проложены внутри приваренной к потолочной полке корпуса стрелы защитной тоннельной трубы и совместно с кабельными вставками от клаксона и другой фары-прожектора через закрепленную в хвостовом отсеке на потолочной полке указанного корпуса соединительную колодку и внутреннюю полость поворотной части опорно-поворотного устройства выведены в районе нижнего среза этой поворотной части наружу, а кабельные вставки от блока управляющих электромагнитов упомянутого электрогидравлического распределителя и индикаторов электрического типа степени засоренности сменных фильтроэлементов напорного и сливного фильтров очистки жидкости гидросистемы проложены по металлоконструкции рамного основания указанного устройства рядом с соответствующими соединительными гидравлическими магистралями, с формированием в необходимых местах слабин и подвязкой к ним при помощи бандажей ленточного типа;
- выполнение осевой фиксации поворотной части опорно-поворотного устройства в посадочных гнездах корпуса его рамного основания в нижнем направлении посредством установки между нижним торцом закрепленного на ней кинематического звена зубчатой передачи механизма поворота и примыкающим к нему верхним торцом нижнего посадочного гнезда указанного корпуса упорного подшипника, состоящего из расположенного сверху плоского кольца из закаленной стали и находящейся под ним проставки соответствующей конфигурации из высокопрочного антифрикционного материала, а осевой фиксации от перемещения в верхнем направлении - при помощи установленного на опоре указанной части разрезного пружинного стопорного кольца, взаимодействующего с соответствующим торцом закрепленного на нижнем срезе корпуса рамного основания плоского упорного кольца;
- подкрепление снаружи боковых стенок корпуса стрелы со стороны тыльной части спрофилированными по их внешнему обводу с перекрытием области расположения хвостового отсека и присоединителей под ось крепления хвостовика штока ее приводного гидроцилиндра соответствующими плоскими приварными усилителями, снабженными центрально выполненными в них сквозными отверстиями, обеспечивающими формирование в указанных зонах дополнительных подкрепляющих кольцевых сварных швов;
- выполнение в хвостовиках щек головки стрелы открытых с их торцов криволинейных вырезов, обеспечивающих увеличение общей протяженности соответствующих сварных швов в зонах приварки к боковым стенкам корпуса стрелы;
- выполнение в нижней полке корпуса стрелы, в районе расположения хвостового отсека, между передней стенкой указанного отсека и карманом под хвостовик штока приводного гидроцилиндра стрелы и непосредственно за карманом, сквозных дренажных отверстий для слива конденсата из ее соответствующих полостей;
- выполнение гибкого тягового органа грузоподъемной лебедки в виде стального каната двойной свивки с линейным касанием проволок в прядях с одним органическим сердечником;
- установка на свободном конце гибкого тягового органа лебедки, в районе подсоединения к нему ее крюка пассивного натяжного механизма гравитационного типа;
- выполнение каждого из сведенных в единый блок гидросистемы одноканальных подвижных соединителей поворотного типа, обеспечивающих подачу рабочей жидкости от рамного основания к подвижной части опорно-поворотного устройства в виде полого корпуса втулочного типа, с боковым внешним присоединительным резьбовым штуцером и расположенной над ним шейкой квадратного сечения, внутри которого установлен с возможностью поворота вокруг собственной оси и формированием герметизированной щелевидной полости утоненный в своей средней по высоте части цилиндрический палец с соответствующим осевым присоединительным резьбовым штуцером и глухим центральным сверлением, сообщающим его напроход через сквозные отверстия в стенках утоненной части пальца и расположенную напротив них указанную щелевидную полость с боковым резьбовым штуцером корпуса, зафиксированный в последнем при помощи соответствующих подпятников из антифрикционного материала и разрезного стопорного пружинного кольца, причем они подвешены за шейки своих корпусов в спрофилированных по ним и дискретно разнесенных в окружном направлении прямоугольных пазах плоского диска, с фиксацией в них от невыпадения посредством соответствующих проволочных скруток, снабженного съемными лапками для болтового крепления его на нижнем срезе полого корпуса рамного основания опорно-поворотного устройства;
- выполнение подсоединения вспомогательного съемного насоса к гидросистеме через встроенные в нее за напорным фильтром для очистки рабочей жидкости, на входе в грузоподъемную лебедку, концевые присоединители, имеющие отжимные клапаны с замковыми механизмами шарикового типа;
- выполнение индикатора наклона опорно-поворотного устройства в виде шарнирно подвешенного на горизонтально расположенном штыре корпуса его поворотной части однокоординатного механического креномера маятникового типа со шкалой отсчета на обращенной к нему стенке указанного корпуса, на которой сформированы различимые визуально соответствующие реперы, фиксирующие границы его рабочего положения;
- выполнение клаксона в виде соответствующего электроакустического устройства и закрепление его с возможностью регулировки пространственного положения на корпусе поворотной части опорно-поворотного устройства напротив соответствующей фары-прожектора;
- электрическое сообщение корпуса поворотной части опорно-поворотного устройства с корпусом стрелы посредством соответствующей кабельной вставки;
- снабжение дистанционного пульта управления электросистемы персонифицированным ключом включения электропитания, двумя рукоятками манипуляторного типа для подачи соответствующих команд на управляющие электромагниты электрогидравлического распределителя гидросистемы со встроенной в головку одной из них кнопкой управления клаксоном, а также двухпозиционным автономным переключателем для включения и выключения фар-прожекторов и соответствующими световыми индикаторами, сигнализирующими о наличии в сети электропитания и факте засоренности фильтроэлементов напорного и сливного фильтров очистки рабочей жидкости указанной гидросистемы;
- выполнение пассивного натяжного механизма гравитационного типа в виде полого корпуса соответствующей массы с проушинами в его нижней части под ось шарнирного крепления крюка и установленного в нем через упорный шариковый подшипник подпятника с проушинами в верхней части последнего под ось крепления присоединителя свободного конца гибкого тягового органа грузоподъемной лебедки.
Совпадающими в прототипе и заявляемом изобретении являются первые девять из существенных признаков, приведенных в данном перечне, а остальные - отличительными.
При этом все из указанных признаков относятся к существенным, поскольку каждый из них соответствующим образом (в той или иной мере) влияет на достигаемый при осуществлении заявляемого изобретения технический результат, т.е. находятся с ним в причинно-следственной связи.
Перечисленные в перечне отличительные существенные признаки, характеризующие заявляемую крано-манипуляторную установку, в самом общем виде выражают соответствующую оптимизацию конструкции ее опорно-поворотного устройства, стрелы, компоновки гидравлической грузоподъемной лебедки, а также гидросистемы, средств безопасности, электросистемы и других входящих в нее составных частей.
Характер вышеупомянутого влияния, применительно к каждому из существенных признаков, детально рассмотрен ниже по тексту при пояснении сущности заявляемого изобретения.
Сущность изобретения поясняется чертежами, где изображены:
На фиг.1 - Общий вид заявляемой крано-манипуляторной установки (стрела и крюк лебедки подняты в крайнее верхнее положение, выносные аутригеры опорно-поворотного устройства повернуты опорными пятами вниз, а последние опущены в крайнее нижнее положение).
На фиг.2 - Поперечное сечение А-А (см. фиг.1), крано-манипуляторной установки по месту крепления корпуса приводного гидроцилиндра стрелы в ушах поворотной части ее опорно-поворотного устройства.
На фиг.3 - Общий вид заявляемой крано-манипуляторной установки (стрела - в горизонтальном положении, крюк лебедки - в крайнем верхнем положении, выносные аутригеры опорно-поворотного устройства повернуты опорными пятами вверх, а штоки гидроцилиндров перемещения последних втянуты во внутренние полости их корпусов).
На фиг.4 - Вид Б (см. фиг.3) сверху на крано-манипулятрную установку.
На фиг.5 - Выносной элемент В (см. фиг.4) с увеличенным фрагментом механизма поворота поворотной части опорно-поворотного устройства заявляемой крано-манипуляторной установки, выполненного на основе зубчатой передачи с соответствующим гидравлическим приводом.
На фиг.6 - Поперечное сечение Г-Г (см. фиг.3) крано-манипуляторной установки по месту крепления хвостовика штока приводного гидроцилиндра ее стрелы.
На фиг.7 - Вид Д (см. фиг.3) на тыльную часть стрелы крано-манипуляторной установки в районе шарнирного сочленения ее с поворотной частью опорно-поворотного устройства.
На фиг.8 - Вид Е (см. фиг.3) на поворотную часть опорно-поворотного устройства крано-манипуляторной установки в зоне расположения индикатора его наклона.
На фиг.9 - Вид Ж (см. фиг.4) на опорно-поворотное устройство крано-манипуляторной установки со стороны расположения двухконсольного балансира его рамного основания.
На фиг.10 - Вид И (см. фиг.9) сверху на рамное основание опорно-поворотного устройства крано-манипуляторной установки (поворотная часть опорно-поворотного устройства условно не показана).
На фиг.11 - Выносной элемент К (см. фиг.1), поясняющий сущность операции выноса аутригеров.
На фиг.12 - Общий вид поворотной части опорно-поворотного устройства крано-манипуляторной установки.
На фиг.13 - Вид Л (см. фиг.12) сбоку на поворотную часть опорно-поворотного устройства.
На фиг.14 - Выносной элемент М (см. фиг.13), поясняющий конструктивное исполнение опоры поворотной части опорно-поворотного устройства.
На фиг.15 - Вид Н (см. фиг.14) сверху на опору поворотной части опорно-поворотного устройства (корпус поворотной части условно не показан).
На фиг.16 - Поперечное сечение О-О (см. фиг.14) опоры поворотной части опорно-поворотного устройства.
На фиг.17 - Поперечное сечение П-П (см. фиг.13) опоры поворотной части опорно-поворотного устройства.
На фиг.18 - Выносной элемент Р (см. фиг.12), поясняющий конструктивное исполнение сформированного на поворотной части опорно-поворотного устройства кинематического звена зубчатой передачи механизма ее поворота (поворотная часть условно не показана).
На фиг.19 - Продольный разрез С-С (см. фиг.4) хвостового отсека стрелы с установленной в нем гидравлической грузоподъемной лебедкой.
На фиг.20 - Продольный разрез Т-Т (см. фиг.19) гидравлической грузоподъемной лебедки (гибкий тяговый орган лебедки и заделка соответствующего конца его в проушине ее барабана условно не показаны).
На фиг.21 - Вид У (см. фиг.4) на одну из выдвижных балок выносных аутригеров опорно-поворотного устройства в районе установки гибкого страховочного фала, связывающего ее с рамным основанием указанного устройства.
На фиг.22 - Выносной элемент Ф (см. фиг.9), поясняющий особенности фиксации поворотной части опорно-поворотного устройства в корпусе его рамного основания от несанкционированного перемещения в посадочных гнездах указанного корпуса в верхнем направлении и крепления съемного блока одноканальных подвижных соединителей поворотного типа.
На фиг.23 - Поперечный разрез Х-Х (см. фиг.22) блока одноканальных подвижных соединителей.
На фиг.24 - Продольный разрез Ц-Ц, (см. фиг.23) одного из одноканальных подвижных соединителей, входящих в съемный блок.
На фиг.25 - Поперечное сечение Ш-Ш (см. фиг.24) одного из одноканальных подвижных соединителей, входящих в съемный блок, по месту расположения шейки квадратного сечения в теле его полого корпуса с боковым внешним присоединительным резьбовым штуцером (цилиндрический палец указанного соединителя с осевым присоединительным резьбовым штуцером условно не показан).
На фиг.26 - Выносной элемент Щ (см. фиг.23), поясняющий особенности крепления одноканальных подвижных соединителей в прямоугольных пазах плоского диска (три остальные соединителя из четырех условно не показаны).
На фиг.27 - Выносной элемент Э (см. фиг.3), поясняющий особенности крепления навесного тормозного клапана на корпусе приводного гидроцилиндра стрелы.
На фиг.28 - Поперечное сечение Ю-Ю (см. фиг.27) приводного гидроцилиндра стрелы в районе закрепления на его корпусе тормозного клапана.
На фиг.29 - Поперечный разрез Я-Я (см. фиг.9) рамного основания опорно-поворотного устройства крано-манипуляторной установки в районе крепления на нем многосекционного золотникового электрогидравлического распределителя гидросистемы.
На фиг.30 - Поперечное сечение A1-A1 (см. фиг.19) тыльной части стрелы в районе закрепления выходящих из ее хвостового отсека соответствующих гидравлических магистралей.
На фиг.31 - Вид Б1 (см. фиг.3) сверху на головку стрелы в районе закрепления кабельных вставок от подвешенных на ней ограничителя высоты подъема крюка лебедки и фары-прожектора.
На фиг.32 - Вид B1 (см. фиг.9) сбоку на клаксон.
На фиг.33 - Общий вид стрелы.
На фиг.34 - Поперечное сечение Г1-Г1 (см. фиг.33) стрелы по месту установки в ней отклоняющего пальца, минимизирующего провисание гибкого тягового органа грузоподъемной лебедки в районе расположения кармана под хвостовик штока ее приводного гидроцилиндра.
На фиг.35 - Поперечное сечение Д1-Д1 (см. фиг.33) головки стрелы по месту закрепления в ней вращающегося концевого блока.
На фиг.36 - Вид E1 (см. фиг.3) с торца на головку стрелы.
На фиг.37 - Общий вид корпуса стрелы.
На фиг.38 - Вид Ж1 (см. фиг.37) снизу на корпус стрелы.
На фиг.39 - Поперечное сечение И1-И1 (см. фиг.37) корпуса стрелы в районе приварки к его потолочной полке защитной тоннельной трубы.
На фиг.40 - Поперечный разрез K1-K1 (см. фиг.37) корпуса стрелы в районе расположения вертикально ориентированной задней перемычки ее головки.
На фиг.41 - Поперечный разрез Л1-Л1 (см. фиг.38) тыльной части корпуса стрелы.
На фиг.42 - Схема принципиальная гидравлическая крано-манипуляторной установки.
На фиг.43 - Общий вид дистанционного пульта управления крано-манипуляторной установки в аксонометрической проекции.
На фиг.44 - Фигура оператора крано-манипуляторной установки с дистанционным пультом управления в рабочем положении.
На фиг.45 - Общий вид дистанционного пульта управления в ортогональной проекции.
На фиг.46 - Вид M1 (см. фиг.45) сверху на дистанционный пульт управления.
На фиг.47 - Схема электрическая общая монтажа электрооборудования, располагаемого на стреле и опорно-поворотном устройстве крано-манипуляторной установки.
На фиг.48 - Грузовысотная характеристика одного из возможных вариантов реализации заявляемой крано-манипуляторной установки.
На фиг.49 - Общий вид одного из возможных вариантов использования заявляемой крано-манипуляторной установки в составе специализированного подъемно-транспортного средства.
На фиг.50 - Поперечное сечение H1-H1 (см. фиг.49) специализированного подъемно-транспортного средства по месту крепления заявляемой крано-манипуляторной установки на его шасси.
На фиг.51 - Поперечное сечение O1-O1 (см. фиг.49) специализированного подъемно-транспортного средства по месту крепления заявляемой крано-манипуляторной установки на его шасси.
На фиг.52 - Выносной элемент П1 (см. фиг.33), поясняющий особенности конструктивного исполнения гравитационного механизма натяжения гибкого тягового органа грузоподъемной лебедки и крепления ее крюка.
На фиг.53 - Вид P1 (см. фиг.52) сбоку на крюк грузоподъемной лебедки.
Заявляемая крано-манипуляторная установка 1 предназначена для выполнения, преимущественно в составе специализированных подъемно-транспортных средств 2, погрузочно-разгрузочных и монтажных работ. В принципе она может быть использована и в качестве соответствующего стационарного грузоподъемного оборудования.
Конструктивно крано-манипуляторная установка содержит опорно-поворотное устройство 3 с выносными аутригерами 4, 5, шарнирно закрепленную на его поворотной части 6 с возможностью углового перемещения в вертикальной плоскости односекционную цельносварную стрелу 7 коробчатого сечения с приводным гидроцилиндром 8, хвостовик 9 штока 10 которого закреплен соответствующим образом в ее присоединителях 11, 12, а корпус 13 - в ушах 14, 15 указанной поворотной части, гидравлическую грузоподъемную лебедку 16 с крюком 17, подвешенным на конце намотанного на ее барабан 18 гибкого тягового органа 19, выведенного на установленный в головке 20 стрелы свободно вращающийся концевой блок 21, гидросистему 22, соответствующие средства безопасности в составе ограничителя 23 высоты подъема крюка контактного типа с нормально замкнутым при помощи подвесного грузила 24 электрическим концевым выключателем, автоматически размыкаемым при подъеме грузила крюком в крайнем верхнем положении, ограничителей 25÷27 величины предельного давления в гидроцилиндрах 28, 29 перемещения самоустанавливающихся опорных пят 30 выносных аутригеров, грузового момента стрелы и грузоподъемности лебедки, противоперегрузочных устройств 31÷33 для защиты элементов конструкции входящего в состав опорно-поворотного устройства механизма поворота 34 его соответствующей части, выполненного на основе зубчатой передачи 35 с соответствующим гидравлическим приводом 36, одно 37 из кинематических звеньев которой сформировано на поворотной части, а другое 38 - на неподвижном рамном основании 39 опорно-поворотного устройства, а также стрелы и лебедки от действия на них динамических сил, реализуемых при резком изменении скорости перемещения груза, индикатора наклона 40 опорно-поворотного устройства и клаксона 41 для подачи предупредительных звуковых сигналов, установленные на корпусе 42 поворотной части опорно-поворотного устройства и головке стрелы с возможностью регулировки пространственного положения, фары-прожекторы 43, 44 для освещения крюка и места проведения работ и электросистему 45, обеспечивающую функционирование размещенного на опорно-поворотном устройстве и стреле электрооборудования с соответствующей коммутационной и управляющей аппаратурой 46, 47 и кабельной проводкой 48.
Рамное основание 39 опорно-поворотного устройства 3 крано-манипуляторной установки 1 выполнено из двух разнесенных между собой в продольном направлении и кинематически сочлененных друг с другом посредством цилиндрического шарнира 49 поперечной коробчатой направляющей 50 балочного типа с центрально приваренным к ней вертикально ориентированным полым корпусом 51 и двухконсольного балансира 52 с соответствующей опорно-установочной базой и монтажно-присоединительными элементами 53÷56. Такое конструктивное исполнение рамного основания 39 опорно-поворотного устройства 3 обеспечивает хорошее прилегание опорных поверхностей 57, 58 коробчатой направляющей 50 и двухконсольного балансира 52 по четырем точкам к плоскости соответствующей монтажной площадки за счет возможности относительного разворота последних вокруг оси соединяющего их цилиндрического шарнира 49.
Выносные аутригеры 4, 5 опорно-поворотного устройства 3 выполнены в виде телескопически установленных во внутренней полости 59 коробчатой направляющей 50 его рамного основания 39, с возможностью перемещения в противоположных направлениях и стопорения в крайних положениях при помощи двухпозиционных фиксаторов 60 ригельного типа, двух выдвижных балок 61, на внешних концах которых шарнирно подвешены сформированные на основе гидроцилиндров 28, 29 двойного действия поворотные лапы 62 с самоустанавливающимися опорными пятами 30, фиксируемые в крайних позициях шкворнями 63, 64. При этом выдвижные балки 61 выносных аутригеров 4, 5 связаны с рамным основанием 39 опорно-поворотного устройства 3 посредством гибких страховочных фалов 65, длина полупетель провисания которых не превышает рабочего хода указанных балок.
Поворотная часть 6 опорно-поворотного устройства 3 представляет собой установленную в соответствующих посадочных гнездах 66, 67 полого корпуса 51 его рамного основания 39 с возможностью вращения вокруг собственной оси двухопорную консольную балку, состоящую из сваренных между собой коробчатого корпуса 42 и полой опоры 68, снабженных соответствующими верхним концевым присоединителем 69 и ушами 14, 15.
Опора 68 поворотной части 6 опорно-поворотного устройства 3 выполнена цельнолитой в виде трубы ступенчатой конфигурации из стали, обладающей хорошей свариваемостью с ее корпусом 42.
Указанная особенность конструктивного исполнения опоры позволяет существенно упростить технологию изготовления и улучшить ее весовое совершенство по сравнению с известными техническими решениями (см., например, пат. № RU 2085471, В 66 С 23/84, 27.07.97 г.).
Располагаемое на опоре 68 одно из кинематических звеньев 37 зубчатой передачи 35 механизма поворота 34 выполнено в виде закрепляемой посредством запрессовки и дополнительного стопорения от проворота радиальными призонными штифтами 70 необходимых размеров съемной цилиндрической втулки, относительно небольшой высоты, с соответствующим зубчатым венцом 71 из высокопрочной закаленной стали.
При этом в районе верхнего среза указанной опоры 68 сформирован силовой пояс 72 повышенной прочности из двух разнесенных между собой по высоте внешних шпангоутов 73, 74, замкнутых друг на друга дискретно расположенными в окружном направлении вертикальными ребрами 75. Уши 14, 15 с отверстиями 76 под ось 77 крепления корпуса 13 приводного гидроцилиндра 8 стрелы 7 выполнены за одно целое с телом силового пояса 72 и пространственно размещены между его шпангоутами 73, 74, охватывающими их с боков своими асимметрично развитыми в радиальном направлении плоскими ответвлениями 78, 79, имеющими конфигурацию горизонтально ориентированных реброобразных подкосов.
В конструкции крано-манипуляторных установок данного типа поворотная часть их опорно-поворотных устройств занимает особое положение. На ней крепится стрела крано-манипуляторной установки с соответствующим приводным гидроцилиндром. Кинематически она напрямую связана с механизмом ее поворота. Под действием достаточно больших эксплуатационных нагрузок конструкция указанной части опорно-поворотного устройства испытывает сложное напряженно-деформированное состояние.
Поэтому реализованные в ней оптимизация силовой схемы и специфика указанных технических решений помимо вышеотмеченных позитивных моментов обеспечивают высокую несущую способность и практически полностью исключают возможность ее поломки в процессе эксплуатации заявляемой крано-манипуляторной установки.
Другое кинематическое звено 38 зубчатой передачи 35 механизма поворота 34 выполнено в виде сопряженной с зубчатым венцом 71 ее первого кинематического звена 37 зубчатой рейки, концы которой шарнирно сочленены с хвостовиками штоков 80, 81 двух входящих в состав гидропривода 36 гидроцилиндров 82, 83 одностороннего действия, обеспечивающих попеременное перемещение рейки в противоположных направлениях.
Подобные известные механизмы поворота на основе одинарных реечных зубчатых передач с соответствующим гидроприводом (см., например, авт. свид. SU 704888, В 66 С 23/86, 28.12.79 г. и SU 1009988, В 66 С 23/86, 07.04.83 г., а также пат. RU 2096308, В 66 С 23/84, 20.11.97 г. и др.) широко применяются в опорно-поворотных устройствах крано-манипуляторных установок. Данное обстоятельство обусловлено, в основном, наличием хорошо освоенной промышленностью элементной базы, относительно небольшими габаритами указанных механизмов в продольном направлении и другими факторами.
При этом последний из отмеченных факторов позволяет существенно сократить соответствующие размеры опорно-установочной базы крано-манипуляторной установки и высвободить на этой основе достаточно большое место на шасси специализированного подъемно-транспортного средства для других целей.
Осевая фиксация поворотной части 6 опорно-поворотного устройства 3 заявляемой крано-манипуляторной установки 1 в посадочных гнездах 66, 67 корпуса 51 рамного основания 39 в нижнем направлении выполнена посредством установки между нижним торцом 84 кинематического звена 37 зубчатой передачи 35 механизма поворота 34 и примыкающим к нему верхним торцом 85 нижнего посадочного гнезда указанного корпуса упорного подшипника 86, состоящего из расположенного сверху плоского кольца 87 из закаленной стали и находящейся под ним бронзовой проставки 88 соответствующей конфигурации.
От несанкционированного перемещения в посадочных гнездах 66, 67 корпуса 51 рамного основания 39 опорно-поворотного устройства 3 в верхнем направлении его поворотная часть 6 зафиксирована при помощи установленного на ее опоре 68 разрезного пружинного стопорного кольца 89, взаимодействующего с соответствующим торцом 90 закрепленного на нижнем срезе указанного корпуса плоского упорного кольца 91.
Данное техническое решение не сложно в реализации и обеспечивает сравнительно малые потери на трение между соответствующими подвижными и неподвижными частями конструкции опорно-поворотного устройства заявляемой крано-манипуляторной установки.
Корпус 92 стрелы 7 заявляемой крано-манипуляторной установки 1 выполнен примерно равнопрочным из плоских листовых профилей соответствующей формы и размеров с локальным подкреплением в местах действия сосредоточенных нагрузок, а головка 20 - из двух разнесенных между собой в поперечном направлении и консольно закрепленных во внутренней полости 93 корпуса, с соответствующим перекрытием по длине, плоских щек 94, 95 с наклоненными книзу проушинами с отверстиями 96 под ось 97 крепления вращающегося концевого блока 21.
Щеки 94, 95 головки 20 стрелы 7 жестко замкнутых друг на друга при помощи расположенных между ними, в пределах их внешнего обвода, локальных перемычек 98÷100 и охватывающего проушины спереди, в плоскости установки вращающегося концевого блока 21, скобообразного ограничителя 101 бокового перемещения гибкого тягового органа 19 грузоподъемной лебедки 16, с приваркой их по месту сопряжения с указанными щеками.
Указанные особенности конструктивного исполнения стрелы заявляемой крано-манипуляторной установки позволяют достигнуть максимального облегчения при сохранении необходимой несущей способности и использовать для ее изготовления широко доступный стандартный листовой прокат и простые технологии.
Внутри тыльной части стрелы 7 сформирован хвостовой отсек 102 с соответствующими присоединительными отверстиями 103 в днище 104 и щелевым проемом 105 между верхним срезом его передней стенки 106 и потолочной полкой 107 ее корпуса 92, снабженный перекрываемым съемной крышкой 108 входным люком 109.
Наличие такого отсека позволяет рационально использовать внутреннее пространство стрелы для размещения там ее соответствующего оборудования с обеспечением удобного доступа к нему.
Присоединители 11, 12 с отверстиями 110 под ось 111 крепления хвостовика 9 штока 10 приводного гидроцилиндра 8 стрелы 7 встроены непосредственно в боковые стенки 112, 113 ее корпуса 92 за хвостовым отсеком 102, с образованием вокруг них заглубленного вовнутрь и обращенного кверху дном 114 кармана 115 и щелевидного проема 116 между ним и потолочной полкой 107 указанного корпуса, идентичного по проходному сечению с аналогичным проемом 105 в зоне расположения хвостового отсека 102.
Данное техническое решение позволяет при заданном угловом перемещении стрелы и ограничении соответствующего транспортного габарита заявляемой крано-манипуляторной установки в вертикальной плоскости оптимизировать величину рабочею хода и длину ее приводного гидроцилиндра, а также прочность конструкции в районе крепления хвостовика его штока.
Боковые стенки 112, 113 корпуса 92 стрелы 7 со стороны тыльной части подкреплены снаружи спрофилированными по их внешнему обводу, с относительно небольшим смещением книзу и перекрытием области расположения хвостового отсека 102 и присоединителей 11,12 под ось 111 крепления хвостовика 9 штока 10 ее приводного гидроцилиндра 8, соответствующими приварными усилителями 117, 118, снабженными центрально выполненными в них развитыми по диаметру сквозными отверстиями 119, обеспечивающими формирование в указанных зонах дополнительных подкрепляющих кольцевых сварных швов 120.
Наличие указанных усилителей позволяет относительно несложным способом существенно увеличить фактический момент сопротивления тыльной части конструкции стрелы заявляемой крано-манипуляторной установки действующим в данной зоне сосредоточенным нагрузкам.
В хвостовиках щек 94, 95 головки 20 стрелы 7 выполнены открытые с их торцов криволинейные вырезы 121, обеспечивающие увеличение общей протяженности и оптимизацию конфигурации соответствующих сварных швов 122 в зонах приварки щек к боковым стенкам 112, 113 корпуса 92 стрелы.
В нижней полке 123 корпуса 92 стрелы 7, в районе расположения днища 104 хвостового отсека 102, между передней стенкой 106 указанного отсека и карманом 115 под хвостовик 9 штока 10 приводного гидроцилиндра 8 стрелы и непосредственно за карманом выполнены сквозные дренажные отверстия 124÷126 для слива конденсата из ее соответствующих полостей.
Лебедка 16 заявляемой крано-манипуляторной установки 1 выполнена в виде компактного грузоподъемного модуля с вращающимся барабаном 18, приводимым в действие героторным гидромотором 127, и встроенными в нее редуктором 128 планетарного типа, дисковым тормозом 129 и соответствующими гидравлическими клапанами 130, 131, один из которых тормозной, а другой - типа “или”. В качестве гибкого тягового органа 19 указанной лебедки 16 использован стальной канат двойной свивки с линейным касанием проволок в его прядях типа ЛК-Р с одним органическим сердечником.
Такой канат слабо раскручивается под действием растягивающей нагрузки (либо после снятия ее) вокруг собственной оси, когда крюк подвешивается на одной ветви.
Наличие в составе заявляемой крано-манипуляторной установки гидравлической грузоподъемной лебедки позволяет выполнять погрузочно-разгрузочные, либо монтажные, работы, требующие большой точности и плавной посадки перемещаемых объектов, в том числе и связанные с опусканием их на большую глубину.
Конструктивно грузоподъемная лебедка 16 размещена в хвостовом отсеке 102 стрелы 7 с жестким закреплением болтами 132 на его днище 104, проводкой гибкого тягового органа 19 напроход внутри корпуса 92 последней через вышеуказанные щелевые проемы 105, 116 и соответствующее сквозное отверстие 133 в вертикально ориентированной задней перемычке 100 ее головки 20, минимизацией провисания его в районе расположения кармана 115 и дополнительной блокировкой в ручье 134 вращающегося концевого блока 21 посредством соответствующих отклоняющего и блокировочного пальцев 135 и 136. Первый из указанных пальцев 135 установлен под гибким тяговым органом 19 с возвышением над дном 114 кармана 115 и закреплением своими концами в боковых стенках 112, 113 корпуса 92 стрелы 7, а второй - в головке 20 последней, над вращающимся концевым блоком 21, с закреплением в отверстиях 137 ее щек 94, 95 с возможностью свободного проворота вокруг собственной оси и формированием консольно выступающих из них наружу концов.
Такое размещение грузоподъемной лебедки с проводкой гибкого тягового органа напроход внутри корпуса стрелы позволяет сократить соответствующие габариты последней и сделать ее внешний облик более совершенным.
Конструкция используемых в составе стрелы заявляемой крано-манипуляторной установки для упорядочения расположения гибкого тягового органа ее грузоподъемной лебедки отклоняющего и блокировочного элементов предельно проста, а установка их не вызывает каких-либо затруднений. При этом корпус стрелы обеспечивает надежную экранировку указанного гибкого тягового органа, сводя к минимуму вероятность травмирования им обслуживающего персонала в случае его аварийного обрыва.
На свободном конце гибкого тягового органа 19 лебедки 16, в районе подсоединения к нему ее крюка 17 установлен пассивный натяжной механизм 138 гравитационного типа.
Гидросистема 22 заявляемой крано-манипуляторной установки 1 выполнена по двухнасосной открытой схеме с основным регулируемым аксиально-поршневым и вспомогательным съемным (с ручным либо электрическим приводом) насосами 139, 140, с возможностью реализации комбинированного управления гидравлическим приводом 36 зубчатой передачи 35 механизма поворота 34, приводным гидроцилиндром 8 стрелы 7 и грузоподъемной лебедкой 16, как дистанционно, например, по электрическому кабелю 141, с использованием дистанционного пульта 142 поясного типа, так и напрямую, в ручном режиме, для чего в ее состав включен соответствующий многосекционный золотниковый электрогидравлический распределитель 143, снабженный блоком встроенных в него управляющих электромагнитов 144 и съемными механическими рукоятками 145 перемещения его золотников 146, и только ручного управления гидроцилиндрами 28, 29 перемещения самоустанавливающихся опорных пят выносных аутригеров 4, 5 и переключением режимов работы с задействования последних на задействование гидравлического привода вышеуказанной передачи, приводного гидроцилиндра стрелы и грузоподъемной лебедки и обратно при помощи рукояток 147÷149 соответствующих гидравлических распределителей 150, 151 и трехходового крана 152 с прямым управлением, прокладкой соединительных гидравлических магистралей 153 по кратчайшим трассам, с формированием соответствующих слабин и дискретным закреплением их в необходимых местах на металлоконструкции установки при помощи механических прихватов 154 и обеспечением подачи рабочей жидкости от неподвижного рамного основания 39 к поворотной части 6 опорно-поворотного устройства 3 и обратно через центрально закрепленный на нижнем срезе полого корпуса 51 указанного основания съемный блок 155 стандартных одноканальных подвижных соединителей 156 поворотного типа с одной степенью свободы.
Каждый из сведенных в единый блок 155 гидросистемы 22 одноканальных подвижных соединителей 156 выполнен в виде полого корпуса 157 втулочного типа, с боковым внешним присоединительным резьбовым штуцером 158 и расположенной над ним шейкой 159 квадратного сечения, внутри которого установлен, с возможностью поворота вокруг собственной оси и формированием герметизированной щелевидной кольцевой полости 160, утоненный в своей средней по высоте части, цилиндрический палец 161 с соответствующим осевым присоединительным резьбовым штуцером 162 и глухим центральным сверлением 163, сообщающим его напроход через сквозные отверстия 164 в стенках утоненной части пальца и расположенную напротив них указанную щелевидную кольцевую полость с боковым резьбовым штуцером корпуса, зафиксированный в последнем при помощи соответствующих подпятников 165, 166 из антифрикционного материала и разрезного стопорного пружинного кольца 167.
При этом схемно одноканальные подвижные соединители 156 подвешены за шейки 159 своих корпусов 157 в спрофилированных по ним и дискретно разнесенных в окружном направлении прямоугольных пазах 168 плоского диска 169 с фиксацией в них от невыпадания посредством соответствующих проволочных скруток 170 снабженного съемными лапками 171 для болтового крепления 172 его на нижнем срезе полого корпуса 51 рамного основания 39 опорно-поворотного устройства 3.
Такое конструктивное исполнение гидросистемы заявляемой крано-манипуляторной установки рационально как с точки зрения эксплуатации, так и в отношении оптимизации ее стоимости. Обусловлено это тем, что операции, связанные с выносом аутригеров опорно-поворотного устройства, переводом их в транспортное положение для данного типа установки и переключение режимов работы последней без особых затруднений могут выполняться с использованием прямого (рычажного) управления соответствующей аппаратурой указанной гидросистемы, а непосредственное производство особо опасных погрузочно-разгрузочных либо монтажных, работ - с использованием дистанционного управления, когда оператор может находиться на некотором удалении от места их проведения или в специально оборудованном укрытии.
Использование в ее составе регулируемого аксиально-поршневого насоса позволяет в процессе работы заявляемой крано-манипуляторной установки посредством изменения его рабочего объема соответствующим образом варьировать подачу рабочей жидкости к ее исполнительным механизмам в зависимости от потребляемой ими мощности.
Специально предусмотренный в конструкции указанного насоса регулятор обеспечивает бесступенчатое изменение его рабочего объема пропорционально рабочему давлению в гидросистеме крано-манипуляторной установки. Для относительно небольшого количества гидравлических каналов, в данном случае четырех, и ограниченного угла поворота стрелы заявляемой крано-манипуляторной установки в окружном направлении используемый в составе ее гидросистемы способ подачи рабочей жидкости от неподвижного рамного основания к поворотной части опорно-поворотного устройства и обратно вполне оправдан. Стандартные одноканальные подвижные соединители поворотного типа с одной степенью свободы достаточно просты в конструктивном исполнении и хорошо освоены промышленностью. Предлагаемый для решения данной задачи вариант компоновки блока указанных соединителей отличается легкостью сборки и демонтажа, а также удобством доступа при подсоединении к нему соответствующих внешних соединительных гидравлических магистралей.
Подсоединение вспомогательного съемного насоса 140 к гидросистеме 22 осуществляется через встроенные в нее за напорным фильтром 173, на входе в лебедку 16, быстродействующие концевые присоединители 174, на основе отжимных клапанов с замковыми механизмами шарикового типа, исключающие выброс (слив) рабочей жидкости из гидросистемы при съеме указанного насоса.
Ограничитель 23 высоты подъема крюка 17 грузоподъемной лебедки 16 закреплен на одном из консольных концов установленного в головке 20 стрелы 7 блокировочного пальца 136 с охватом его подвесным грузилом 24 сходящей с вращающегося концевого блока 21, с самоориентацией по гравитационной вертикали, ветви 175 ее гибкого тягового органа 19.
Ограничители 25÷27 величины предельного давления в гидроцилиндрах 28, 29 перемещения самоустанавливающихся опорных пят 30 выносных аутригеров 4, 5, грузового момента стрелы 7 и грузоподъемности лебедки 16 выполнены в виде настраиваемых соответствующим образом автономных предохранительных клапанов 176÷178, один из которых установлен непосредственно перед гидравлическими распределителями 150, 151 управления гидроцилиндрами 28, 29 перемещения указанных опорных пят, а остальные интегрированы в соответствующие секции 179, 180 электрогидравлического распределителя 143 гидросистемы 22 по линиям питания поршневой полости 181 приводного гидроцилиндра 8 стрелы и гидромотора 127 лебедки при вращении ее барабана 18 на поднятие груза.
Вышеуказанные противоперегрузочные устройства 31÷33 выполнены в виде настраиваемых соответствующим образом автономных предохранительных клапанов 182, 183, интегрированных в соответствующую секцию 184 электрогидравлического распределителя 143 по линиям питания гидроцилиндров 82, 83 гидравлического привода 36 зубчатой передачи 35 механизма поворота 34, а также установленного на входе в поршневую и штоковую полости 181, 185 приводного гидроцилиндра 8 стрелы 7 и встроенного непосредственно в гидросхему 186 лебедки 16 нормально закрытых гидравлических тормозных клапанов 187 и 130 с управляемыми запорными элементами.
При этом первый из указанных тормозных клапанов 187 выполнен навесным и жестко закреплен посредством болтов 188 на опорной плите переходно-стыковочного адаптера 189, неподвижно зафиксированного на корпусе 13 приводного гидроцилиндра 8 стрелы 7 при помощи легкоразъемных стяжных хомутов 190.
Данное техническое решение позволяет использовать для оснащения приводного гидроцилиндра стрелы заявляемой крано-манипуляторной установки серийно производимую специализированными предприятиями, а значит и достаточно хорошо отработанную и надежную функционально законченную защитную и регулирующую аппаратуру навесного типа в модульном исполнении и на этой основе предельно упростить конструкцию самого гидроцилиндра и значительно улучшить его качественные показатели. При этом крепление устанавливаемого таким образом на гидроцилиндре тормозного клапана не вызывает никаких затруднений.
Установленная на головке 20 стрелы 7 фара-прожектор 44 жестко закреплена, с ориентацией лицевой поверхностью книзу, на другом из консольных концов ее блокировочного пальца 136, со стороны, противоположной размещению ограничителя 23 высоты подъема крюка 17 лебедки 16.
Такое закрепление фары-прожектора обеспечивает автоматическую синхронизацию ее пространственного положения с ограничителем высоты подъема крюка грузоподъемной лебедки под действием соответствующего натяжного усилия его подвесного грузила.
В заявляемой крано-манипуляторной установке предусмотрена возможность регулировки пространственного положения обеих фар-прожекторов. При этом световое пятно располагаемой на поворотной части опорно-поворотного устройства фары-прожектора фокусируется в направлении места проведения работ (к головке стрелы), а другой - на крюке грузоподъемной лебедки и располагаемой ниже зоне захвата груза. При этом данная регулировка первой из указанных фар-прожекторов осуществляется непосредственно перед работой крано-манипуляторной установки и далее ее пространственное положение в процессе производства работ практически не корректируется.
Корректировка пространственного положения другой, располагаемой на головке стрелы, фары-прожектора благодаря ее способности к самоориентации происходит в процессе работы крано-манипуляторной установки автоматически.
Индикатор 40 наклона опорно-поворотного устройства 3 заявляемой крано-манипуляторной установки 1 выполнен в виде шарнирно подвешенного на горизонтально расположенном штыре 191 корпуса 42 его поворотной части 6 однокоординатного механического креномера маятникового типа со шкалой отсчета на обращенной к нему стенке указанного корпуса, на которой сформированы хорошо различимые визуально соответствующие реперы 192, фиксирующие границы его рабочего положения.
Индикатор такого конструктивного исполнения предельно прост и дешев в изготовлении, надежен в работе и удобен в эксплуатации.
Клаксон заявляемой крано-манипуляторной установки 1 выполнен в виде соответствующего электроакустического устройства по безрупорной схеме и закреплен, с возможностью регулировки пространственного положения, на корпусе 42 поворотной части 6 ее опорно-поворотного устройства 3, напротив соответствующей фары-прожектора 43. Он имеет небольшие габариты и массу и управляется по электрическому каналу. Звуковой сигнал его отчетливо слышен в пределах рабочей площадки.
Кабельная проводка 48 электросистемы 45 заявляемой крано-манипуляторной установки 1 выполнена по однопроводной схеме, с подсоединением отрицательных подводов от внешних источников тока к металлоконструкции опорно-поворотного устройства 3 и стрелы 7, в виде совокупности легкоразъемных кабельных вставок 193÷200, в модульном исполнении, с соответствующими концевыми электрическими присоединителями, соединяющих электрооборудование, располагаемое на стреле и опорно-поворотном устройстве, с размещенной на рамном основании 39 последнего коммутационной аппаратурой в блочном исполнении, снабженной присоединительными электроразъемами 201÷204 для подстыковки к ней кабелей питания 141, 205 от дистанционного пульта управления 142 и источников тока, а также кабельных вставок 193, 195 от указанного электрооборудования. При этом идущие от ограничителя 23 высоты подъема крюка 17 лебедки 16 и установленной на головке 20 стрелы 7 фары-прожектора 44 кабельные вставки 194, 199 проложены внутри приваренной к потолочной полке 107 корпуса 92 стрелы защитной тоннельной трубы 206 и совместно с кабельными вставками 196, 197 от клаксона 41 и другой фары-прожектора 43 через закрепленную в хвостовом отсеке 102 на потолочной полке указанного корпуса соединительную колодку 207 и внутреннюю полость 208 поворотной части 6 опорно-поворотного устройства 3 выведены в районе ее нижнего среза наружу, а кабельная вставка 195 от блока управляющих электромагнитов 144 электрогидравлического распределителя 143 гидросистемы 22 и индикаторов электрического типа степени засоренности сменных фильтроэлементов напорного и сливного фильтров 173 и 209 очистки рабочей жидкости гидросистемы проложены по металлоконструкции рамного основания 39 опорно-поворотного устройства рядом с соответствующими соединительными гидравлическими магистралями 153, с формированием в необходимых местах слабин и подвязкой к ним при помощи бандажей 210 ленточного типа.
В связи с вышеотмеченной спецификой исполнения кабельной проводки 48 электросистемы 45 заявляемой крано-манипуляторной установки 1 корпус 42 поворотной части 6 опорно-поворотного устройства 3 электрически сообщен с корпусом 92 стрелы 7 посредством соответствующей токопроводящей кабельной вставки 198.
Вследствие указанных особенностей конструктивного исполнения она относительно проста и дешева в изготовлении и отличается легкостью монтажа и демонтажа и удобством обслуживания. Прокладка указанной кабельной проводки во внутренней полости корпуса стрелы с использованием для экранировки тоннельной трубы практически полностью исключает возможность повреждения ее располагающимся вблизи гибким тяговым органом грузоподъемной лебедки.
Дистанционный пульт управления 142 электросистемы снабжен персонифицированным ключом 211 включения электропитания, двумя рукоятками 212, 213 манипуляторного типа для подачи соответствующих команд на управляющие электромагниты 144 электрогидравлического распределителя 143 гидросистемы 22 со встроенной в головку 214 одной из них кнопкой 215 управления клаксоном 41, а также двухпозиционным автономным переключателем 216 для включения и выключения фар-прожекторов 43, 44 и соответствующими световыми индикаторами 217÷219, сигнализирующими о наличии в сети электропитания и факте засоренности фильтроэлементов напорного и сливного фильтров 173 и 209 очистки рабочей жидкости гидросистемы.
Без указанного ключа никто, кроме оператора, не сможет подать в электросистему заявляемой крано-манипуляторной установки соответствующее электропитание. Используемые в составе данного дистанционного пульта рукоятки манипуляторного типа предельно просты и удобны в управлении. Они, пожалуй, в наибольшей степени подходят для оператора, поскольку управляющие перемещения их хорошо ассоциируются в его сознании с соответствующими рабочими движениями стрелы и грузоподъемной лебедки.
Один из возможных вариантов размещения заявляемой крано-манипуляторной установки 1 на шасси 220 автомобильного транспортного средства 221 с использованием устанавливаемого на его хребтовых лонжеронах 222, 223 промежуточного надрамника 224 показан на фиг.49.
Крепление крано-манипуляторной установки 1 на надрамнике 224 выполнено при помощи совокупности пропущенных сквозь щелевые пазы монтажно-присоединительных элементов 53÷56 коробчатой направляющей 50 и двухконсольного балансира 52 рамного основания 39 ее опорно-поворотного устройства 3 и охватывающих хребтовые лонжероны 225, 226 надрамника с обеих сторон как индивидуально, без расположенных под ними лонжеронов 222, 223 шасси 220 автомобильного транспортного средства 221, так и в пакете с ними, стяжных резьбовых шпилек 227, 228, а также установочных шайб 229, накладных планок 230 и поджимных и контровочных гаек 231, 232.
Такое крепление предельно просто в исполнении, обладает достаточно высоким весовым совершенством и обеспечивает необходимую жесткость сопряжения и совместность деформирования рамы шасси автомобильного транспортного средства и установленного на ней надрамника с крано-манипуляторной установкой.
Для укладки стрелы 7 заявляемой крано-манипуляторной установки 1 в конструкции такого специализированного подъемно-транспортного средства 2 должна быть предусмотрена соответствующая стойка 233.
Маслобак 234 гидросистемы 22 заявляемой крано-манипуляторной установки 1 выполнен в виде автономного функционального законченного модуля, устанавливаемого на надрамнике 224, либо шасси 220 автомобильного транспортного средства 221.
Аксиально-поршневой насос 139 гидросистемы 22 крано-манипуляторной установки 1 размещают на надрамнике 224 либо шасси 220 автомобильного транспортного средства 221 вблизи от коробки отбора мощности двигателя указанного средства, используемой для его привода. При этом кинематическое сопряжение приводного вала коробки отбора мощности двигателя автомобильного транспортного средства 221 осуществляется напрямую при помощи соответствующей соединительной муфты либо через промежуточный соединитель карданного типа.
Электроснабжение электрической системы 45 заявляемой крано-манипуляторной установки 1 при размещении ее на шасси 220 автомобильного транспортного средства 221 осуществляют от его бортовых источников питания по кабелю 205.
Погрузочно-разгрузочные и монтажные работы с использованием заявляемой крано-манипуляторной установки 1 выполняют, как правило, с выносом лап 62 аутригеров 4, 5. В конструкции заявляемой крано-манипуляторной установки 1 использованы выносные аутригеры 4, 5 по пат. RU 2124993, B 60 S 9/02, В 66 С 23/28, от 20.11.2001 г.
В исходном (транспортном) положении лапы 62 выносных аутригеров 4, 5 опорно-поворотного устройства 3 крано-манипуляторной установки 1 повернуты опорными пятами 30 вверх и зафиксированы шкворнями 63, 64, вставленными в соответствующие отверстия 235 в их теле и выдвижных балках 61, задвинутых до конца во внутреннюю полость 59 коробчатой направляющей 50 рамного основания 39 со стопорением их там при помощи двухпозиционных фиксаторов 60 ригельного типа.
Перевод выносных аутригеров 4, 5 в рабочее положение осуществляют следующим образом. Сначала посредством извлечения шкворней 63, 64 из отверстий 235 выдвижных балок 61 и поворотных лап 62 расфиксируют последние. После расфиксации лапы 62 выносных аутригеров 4, 5 находятся в сбалансированном относительно осей 236 их поворота состоянии. Данная балансировка достигается тем, что обусловленные весом каждой из поворотных лап 62 моменты уравновешиваются соответствующими противодействующими моментами, реализуемыми упруго-деформируемыми элементами 237, например пружинного типа, кинематически связывающими указанные лапы с выдвижными балками 61. Затем лапы 62 поворачивают вручную относительно осей 236 на 180° опорными пятами 30 книзу и фиксируют их шкворнями 63, 64, вводимыми в предусмотренные для этого отверстия 238 в их теле и выдвижных балках 61.
После этого, используя двухпозиционные фиксаторы 60, расцепляют выдвижные балки 61 с коробчатой направляющей 50 рамного основания 39 опорно-поворотною устройства 3 и посредством перемещения их вручную на себя осуществляют вынос лап 62 аутригеров 4, 5 в боковом направлении.
В крайнем выдвинутом положении указанные балки 61 стопорятся при помощи двухпозиционных фиксаторов 60. При выполнении указанной операции несанкционированный выброс выдвижных балок 61 из внутренней полости 59 коробчатой направляющей 50, например в связи с аварийным срезанием ригелей двухпозиционных фиксаторов или заклиниванием их пружин, исключается посредством гибких страховочных фалов 65, ограничивающих величину рабочего хода указанных балок.
Убедившись в надежности стопорения поворотных лап 62 и выдвижных балок 61, включают основной (аксиально-поршневой) насос 139 гидросистемы 22 заявляемой крано-манипуляторной установки 1 и переводят управляющую рукоятку 149 трехходового крана 152 в позицию I (“Перемещение опорных пят 30 поворотных лап 62 выносных аутригеров 4, 5”). При этом поток рабочей жидкости от насоса 139 направляется в сторону гидроцилиндров 28, 29 указанных лап 62.
Затем соответствующими движениями управляющих рукояток 147, 148 гидравлических распределителей 150, 151 гидросистемы 22 перемещают в необходимом направлении их золотники 239. При этом рабочая жидкость через них и соответствующие соединительные гидравлические магистрали 153 поступает в поршневые полости 240 гидроцилиндров 28, 29 поворотных лап 62 выносных аутригеров 4, 5.
Под действием давления рабочей жидкости поршни со штоками 241 указанных гидроцилиндров 28, 29 и жестко сцепленными с ними самоустанавливающимися опорными пятами 30 поворотных лап 62 опускаются вниз до упора последних в поверхность грунта, обеспечивая соответствующую устойчивость специализированного подъемно-транспортного средства 2 от опрокидывания.
При этом опускание опорных пят 30 поворотных лап 62 выносных аутригеров 4, 5 может осуществляться как индивидуально (поочередно), так и одновременно.
В процессе установки опорных пят 30 поворотных лап 62 выносных аутригеров 4, 5 на грунт непревышение величины давления в поршневых полостях 240 гидроцилиндров 28, 29 лап, а следовательно и соответствующей силы поджатия пят к нему, обеспечивается при помощи ограничителя 25 посредством перепускания рабочей жидкости из указанных полостей на слив со снижением избыточного давления в них до необходимой величины, обусловленной настройкой предохранительного клапана 176 гидросистемы 22.
В принципе вместо выносных аутригеров по патенту RU 2124993 в конструкции заявляемой крано-манипуляторной установки без каких-либо ограничений могут быть использованы также и любые иные, например по патенту RU 2116210, B 60 S 9/02, В 66 С 23/78 от 27.07.98 г., с кривошипно-шатунным механизмом поворота лап, со стационарными (неповоротными) лапами и гидравлически выдвигаемыми балками их выноса и т.д.
Убедившись в правильности и надежности выставки поворотных лап 62 выносных аутригеров 4, 5, рукоятку 149 трехходового крана 152 переводят в позицию II (“Работа механизма поворота 34 поворотной части 6 опорно-поворотного устройства 3, приводного гидроцилиндра 8 стрелы 7 и грузоподъемной лебедки 16”).
При этом поток рабочей жидкости от насоса 139 направляется в сторону указанных исполнительных механизмов крано-манипуляторной установки.
Затем разматывают электрический кабель 141 и подстыковывают один из его концов к присоединительному электроразъему 201 коммутационной аппаратуры 46, а другой к розетке 242 пульта управления 142. Подача электропитания в электросистему 45 заявляемой крано-манипуляторной установки осуществляется соответствующим поворотом ключа 211 пульта управления 142. При этом на лицевой панели 243 пульта управления 142 загорается световой индикатор 217, подтверждающий наличие электропитания в электросистеме 45.
Погрузочно-разгрузочные либо монтажные работы с использованием заявляемой крано-манипуляторной установки 1 могут осуществляться посредством соответствующих манипуляций как ее стрелы 7 и механизма поворота 34, так и крюка 17 грузоподъемной лебедки 16.
Перед началом указанных работ нажатием кнопки 215 управляющей рукоятки 213 пульта управления 142 при помощи клаксона 41 подают соответствующий звуковой предупредительный сигнал, оповещающий находящихся в опасной зоне людей о необходимости срочно покинуть ее.
Убедившись в отсутствии посторонних лиц в опасной зоне оператор крано-манипуляторной установки 1 расфиксирует стрелу 7 и, пользуясь пультом управления 142, поднимает ее со стойки 233 специализированного подъемно-транспортного средства 2 и, поворачивая в окружном направлении с промежуточными остановками в двух взаимно-перпендикулярных плоскостях, при помощи индикатора 40 наклона опорно-поворотного устройства 3 визуально контролирует правильность горизонтирования последнего относительно гравитационной вертикали. При правильной выставке опорно-поворотного устройства 3 маятниковый отвес 244 индикатора 40 должен находиться в секторе шкалы отсчета, ограниченном реперами 192. В этом случае фактический угол наклона опорно-поворотного устройства 3 крано-манипуляторной установки не превышает допустимого по условиям ее эксплуатации значения. На этом собственно и завершается перевод заявляемой крано-манипуляторной установки 1 в рабочее положение.
Для необходимого перемещения груза стрелу 7 заявляемой крано-манипуляторной установки 1 посредством соответствующего подъема (опускания) и поворота ее в окружном направлении устанавливают непосредственно над ним и, пользуясь лебедкой 16, опускают крюк 17 последней вниз и подвешивают указанный груз на нем.
Затем при помощи лебедки 16 поднимают груз на необходимую высоту и, посредством соответствующих угловых перемещений стрелы 7 в вертикальной плоскости и окружном направлении, переносят его к месту разгрузки. В указанном месте при помощи лебедки 16 груз опускают вниз и снимают его с крюка 17.
В процессе выполнения погрузочно-разгрузочных, либо монтажных, работ подъем (опускание) стрелы 7 заявляемой крано-манипуляторной установки 1 осуществляется следующим образом.
Для подъема стрелы 7 соответствующим движением рукоятки 213 дистанционного пульта управления 142 подают управляющий сигнал на необходимый электромагнит 144 секции 179 электрогидравлического распределителя 143 гидросистемы 22. При срабатывании электромагнита 144 происходит соответствующее перемещение золотника 146 указанной секции 179 электрогидравлического распределителя 143 и рабочая жидкость от насоса 139 через него, обходной контур 245 располагаемого в линии питания поршневой полости 181 приводного гидроцилиндра 8 стрелы 7 нормально закрытого запорного элемента 246 клапанного типа тормозного клапана 187 и соответствующие соединительные гидравлические магистрали 153 поступает в поршневую полость указанного гидроцилиндра.
Под действием давления рабочей жидкости происходят соответствующее перемещение поршня с выдвижением штока 10 приводного гидроцилиндра 8 и подъем шарнирно связанной с его хвостовиком 9 стрелы 7. При этом отвод рабочей жидкости из штоковой полости 185 приводного гадроцилиндра 8 стрелы 7 осуществляется через принудительно открываемый, отбираемым из линии питания его поршневой полости 181 соответствующим управляющим давлением, другой запорный элемент 247 того же тормозного клапана 187, расположенный в линии питания штоковой полости указанного гидроцилиндра.
Непревышение грузового момента стрелы 7 заявляемой крано-манипуляторной установки 1 при подъеме груза обеспечивается при помощи ограничителя 26 посредством перепускания рабочей жидкости из поршневой полости 181 ее приводного гидроцилиндра 8 на слив через предохранительный клапан 177 со снижением избыточного давления в ней до необходимой величины, определяемой его настройкой.
Для опускания стрелы 7 соответствующим движением рукоятки 213 дистанционного пульта управления 142 подают управляющий сигнал на необходимый электромагнит 144 секции 179 электрогидравлического распределителя 143 гидросистемы 22. При срабатывании электромагнита 144 происходит соответствующее перемещение золотника 146 указанной секции 179 электрогидравлического распределителя 143 и рабочая жидкость от насоса 139 через него, обходной контур 248 располагаемого в линии питания штоковой полости 185 приводного гидроцилиндра 8 стрелы 7 нормально закрытого запорного элемента 247 клапанного типа тормозного клапана 187 и соответствующие соединительные гидравлические магистрали 153 поступает в штоковую полость указанного гидроцилиндра.
Под действием давления рабочей жидкости происходят соответствующее перемещение поршня со втягиванием штока 10 приводного гидроцилиндра 8 и опускание шарнирно связанной с его хвостовиком 9 стрелы 7. При этом отвод рабочей жидкости из поршневой полости 181 приводного гидроцилиндра 8 стрелы 7 осуществляется через принудительно открываемый, отбираемым из линии питания его штоковой полости 185 соответствующим управляющим давлением, другой запорный элемент 246 того же тормозного клапана 187, расположенный в линии питания поршневой полости указанного гидроцилиндра.
При резком изменении скорости перемещения стрелы 7, например в момент экстренного торможения опускаемого груза, защита ее от реализуемой при этом перегрузки осуществляется при помощи соответствующего противоперегрузочного устройства 32 путем перепускания рабочей жидкости на слив через открываемый в этом случае избыточным давлением указанной жидкости запорный элемент 247 тормозного клапана 187.
При аварийном обрыве подводящих магистралей питания приводного гидроцилиндра 8 стрелы 7 рабочая жидкость автоматически запирается при помощи нормально закрывающихся в этом случае элементов 246, 247 тормозного клапана 187 и несанкционированного опускания стрелы не происходит.
Для подъема груза лебедкой 16 соответствующим движением рукоятки 212 дистанционного пульта управления 142 подают управляющий сигнал на необходимый электромагнит 144 секции 180 электрогидравлического распределителя 143 гидросистемы 22. При срабатывании электромагнита 144 происходит соответствующее перемещение золотника 146 указанной секции 180 электрогидравлического распределителя 143 и рабочая жидкость от насоса 139 через него и соответствующие соединительные гидравлические магистрали 153 поступает в рабочую полость 249 гидромотора 127 привода ее барабана 18, в сторону вращения его на поднятие груза, и одновременно через клапан 131 типа “или” - под нажимной поршень 250 нормально замкнутого (заторможенного) дискового тормоза 129. Под действием давления рабочей жидкости нажимной поршень 250 дискового тормоза 129, преодолевая сопротивление поджимных тарельчатых пружин 251 отходит в сторону от его фрикционных дисков, обеспечивая их растормаживание, а выходной вал 252 гидромотора 127 приходит во вращение.
От выходного вала 252 гидромотора 127 вращение через соединительную муфту 253 передается солнечному колесу 254 встроенного в барабан 18 лебедки 16 планетарного редуктора 128. Солнечное колесо 254 приводит во вращение сателлиты 255 планетарного редуктора, кинематически взаимодействующие с его корончатым колесом 256, зубья которого сформированы на внутренней поверхности барабана 18, и последний начинает вращаться в сторону наматывания на него гибкого тягового органа 19.
При наматывании гибкого тягового органа 19 на барабан 18 лебедки 16 происходит поднятие ею груза. Отвод рабочей жидкости из противоположной рабочей полости 257 гидромотора 127 в процессе поднятия груза осуществляется через принудительно открываемый отбираемым из линии питания его другой полости 249 соответствующим управляющим давлением нормально закрытый запорный элемент тормозного клапана 130 лебедки 16.
При перемещении крюка 17 лебедки 16 в крайнее верхнее положение подвесное грузило 24 ограничителя 23 приподнимается верхним срезом наталкивающегося на него механизма 138 с образованием соответствующей слабины провисания его подвесов. При этом происходят размыкание контактов концевого выключателя ограничителя 23 высоты подъема крюка 17, подключенного при помощи кабельной вставки 194 к электросистеме 45 заявляемой крано-манипуляторной установки 1, обесточивание соответствующего управляющего электромагнита 144 секции 180 электрогидравлического распределителя 143 гидросистемы и автоматический останов барабана 18 грузоподъемной лебедки 16.
Для остановки барабана 18 лебедки 16 в любом из промежуточных положений рукоятку 212 дистанционного пульта управления переводят в нейтральное положение. При этом запорный элемент тормозного клапана 130 лебедки 16 закрывается, неподвижно фиксируя гидромотор 127 привода ее барабана 18.
Таким образом, происходит гидравлический останов барабана 18 лебедки 16, а следовательно, и ее крюка 17 с подвешенным на нем грузом.
Одновременно с этим рабочая жидкость через клапан 131 типа “или” отводится из под нажимного поршня 250 и последний под действием поджимных тарельчатых пружин 251 автоматически перемещается в сторону фрикционных дисков тормоза 129, осуществляя сжатие их с необходимой силой. В результате указанного затормаживания фрикционных дисков тормоза 129 происходит дополнительная механическая блокировка барабана 18 грузоподъемной лебедки 16 от проворачивания вокруг собственной оси.
Непревышение установленной грузоподъемности лебедки 16 при подъеме груза обеспечивается при помощи ограничителя 27 посредством перепускания рабочей жидкости на слив через предохранительный клапан 178 со снижением избыточного давления в соответствующей рабочей полости 249 гидромотора 127 до необходимой величины, обусловленной настройкой указанного клапана.
Для опускания груза лебедкой 16 соответствующим перемещением рукоятки 212 дистанционного пульта управления 142 подают управляющий сигнал на другой электромагнит 144 секции 180 электрогидравлического распределителя 143 гидросистемы 22. При срабатывании электромагнита 144 происходит соответствующее перемещение золотника 146 указанной секции 180 электрогидравлического распределителя 143 и рабочая жидкость от насоса 139 через него, обходной контур 258 расположенного в данной линии питания гидромотора 127 нормально закрытого запорного элемента тормозного клапана 130, клапан 131 типа “или” и соответствующие соединительные гидравлические магистрали 153 одновременно поступает в рабочую полость 257 гидромотора и под нажимной поршень 250 дискового тормоза 129. При этом под действием давления рабочей жидкости нажимной поршень 250, преодолевая сопротивление поджимных тарельчатых пружин 251, отходит в сторону от его фрикционных дисков тормоза 129 и последние растормаживаются, а выходной вал 252 гидромотора 127 после снятия указанной механической блокировки начинает вращаться в противоположном направлении, в сторону сматывания гибкого тягового органа 19с барабана 18 лебедки 16. Вращение выходного вала 252 гидромотора 127 через соединительную муфту 253 передается солнечному колесу 254 и далее от него через сателлиты 255 - на корончатое колесо 256 планетарного редуктора 128. Поскольку корончатое колесо 256 жестко связано с барабаном 18, то последний приходит во вращение в сторону сматывания с него гибкого тягового органа 19. В результате сматывания гибкого тягового органа 19 происходит соответствующее опускание крюка 17 лебедки 16 с подвешенным на нем грузом. Отвод рабочей жидкости из другой полости 249 гидромотора 127 при опускании груза осуществляется по соответствующим соединительным гидравлическим магистралям 153 через золотник 146 секции 180 электрогидравлического распределителя 143 гидросистемы 22.
При резком изменении скорости опускаемого лебедкой груза, например в момент экстренного торможения, защита ее от реализуемой при этом перегрузки осуществляется при помощи соответствующего противоперегрузочного устройства 33 путем перепускания рабочей жидкости на слив через открываемый в этом случае избыточным давлением указанной жидкости запорный элемент тормозного клапана 130.
При аварийном обрыве подводящих магистралей питания гидромотора 127 лебедки 16 рабочая жидкость автоматически запирается при помощи тормозного клапана 130 в соответствующей рабочей полости 257 указанного гидромотора и его выходной вал 252 не может провернуться. В результате барабан 18 останавливается и несанкционированного опускания груза не происходит.
Для поворота стрелы 7 в окружном направлении соответствующим перемещением рукоятки 213 дистанционного пульта управления 142 подают управляющий сигнал на необходимый электромагнит 144 секции 184 электрогидравлического распределителя 143 гидросистемы 22. При срабатывании электромагнита 144 указанной секции 184 электрогидравлического распределителя 143 происходит соответствующее перемещение ее золотника 146 и рабочая жидкость от насоса 139, в зависимости от необходимого направления вращения поворотной части 6 опорно-поворотного устройства 3, поступает через него и соответствующие соединительные гидравлические магистрали 153 в рабочую полость 259 одного из двух, например 82, гидроцилиндров гидропривода 36 зубчатой передачи 35 механизма поворота 34.
Под действием давления рабочей жидкости происходит поступательное перемещение штока 80 указанного гидроцилиндра 82 и шарнирно сочлененного с ним соответствующего кинематического звена (рейки) 37 зубчатой передачи 35 механизма поворота 34. Поступательное перемещение указанного звена (рейки) 37 преобразуется во вращательное движение кинематически сочлененного с ним другого звена 38 (зубчатого венца 71) зубчатой передачи 35, сформированного на поворотной части 6 опорно-поворотного устройства 3, а с последней поворачивается соответствующим образом шарнирно закрепленная на ее верхнем конце стрела 7 заявляемой крано-манипуляторной установки 1.
Одновременно шток 81 другого гидроцилиндра 83 утапливается движущимся кинематическим звеном (рейкой) 37 зубчатой передачи 35 вовнутрь его корпуса 260. При этом рабочая жидкость из полости 259 указанного гидроцилиндра 83 отводится по соответствующим соединительным гидравлическим магистралям 153 напрямую через золотник 146 электрогидравлического распределителя 143.
Смена направления вращения поворотной части 6 опорно-поворотного устройства 3 с закрепленной на ней стрелой 7 осуществляется посредством подачи рабочей жидкости в полость 259 гидроцилиндра 83 гидропривода 36 зубчатой передачи 35 механизма поворота 34. При этом кинематическое звено (рейка) 37 указанной зубчатой передачи 35 перемещается штоком 81 гидроцилиндра 83 в обратном направлении.
При резком изменении скорости поворота стрелы 7 в окружном направлении, например в момент экстренного торможения перемещаемого груза, защита элементов конструкции механизма ее поворота 34 от действия реализуемых при этом перегрузок осуществляется при помощи соответствующего противоперегрузочного устройства 31 путем перепускания рабочей жидкости из рабочих полостей 259 гидроцилиндров 82, 83 гидравлического привода 36 зубчатой передачи на слив через предохранительные клапаны 182, 183 со снижением избыточного давления в указанных полостях до величины, обусловленной их настройкой. Электрогидравлический распределитель 143 гидросистемы 22 заявляемой крано-манипуляторной установки 1 обеспечивает в процессе ее работы пропорциональное управление, при котором интенсивность движения исполнительных механизмов прямо пропорциональна величине соответствующих отклонений рукояток 212, 213 дистанционного пульта управления 142.
Факт засоренности сменных фильтроэлементов напорного и сливного фильтров 173, 209 гидросистемы 22 заявляемой крано-манипуляторной установки 1 фиксируется загоранием на лицевой панели 243 дистанционного пульта управления 142 его соответствующих световых индикаторов 218, 219. При загорании указанных индикаторов работу крано-манипуляторной установки останавливают и производят замену засоренных фильтроэлементов новыми.
После снятия перемещаемого груза с крюка 17 лебедки 16 заявляемой крано-манипуляторной установки 1 натяжение ее гибкого тягового органа 19 осуществляется механизмом 138 гравитационного типа, конструктивно выполненным в виде полого корпуса 261 соответствующей массы с проушинами 262, 263 в его нижней части под ось 264 шарнирного крепления крюка и установленного в нем с механической развязкой через упорный шариковый подшипник 265 подпятника 266 с проушинами 267, 268 в верхней части последнего под ось 269 крепления присоединителя 270 свободного конца указанного гибкого тягового органа. Благодаря специфике своего конструктивного исполнения указанный механизм, помимо обеспечения постоянного натяжения гибкого тягового органа лебедки, практически полностью исключает возможность раскрутки ее крюка гибким тяговым органом после снятия с него груза. Последнее обстоятельство в значительной мере облегчает задачу выбора типа каната для указанного органа лебедки и повышает безопасность ее эксплуатации.
По окончании погрузочно-разгрузочных либо монтажных работ стрелу заявляемой крано-манипуляторной установки 1 устанавливают на стойку 233 специализированного подъемно-транспортного средства 2 и фиксируют ее в данном положении, после чего, действуя в обратном порядке, переводят в исходное (транспортное) положение и выносные аутригеры 4, 5.
В случае выхода из строя дистанционного пульта управления 142 для возврата вышеуказанных исполнительных механизмов заявляемой крано-манипуляторной установки 1 в исходное (транспортное) положение необходимые перемещения золотников 146 соответствующих секций 180, 181, 184 электрогидравлического распределителя 143 осуществляют в режиме прямого (ручного) управления при помощи извлекаемых из комплекта запасных частей, инструмента и приспособлений съемных рукояток 145. При аварийной поломке двигателя автомобильного транспортного средства 221 для экстренного опускания либо подъема груза лебедкой 16 используют вспомогательный ручной насос 140 гидросистемы 22. При этом в зависимости от типа указанного насоса подача рабочей жидкости к гидромотору 127 и дисковому тормозу 129 лебедки 16 осуществляется вручную посредством реверсивного качания с необходимой частотой его ручки либо с использованием в качестве привода насоса соответствующего электродвигателя, подключаемого к аккумуляторному источнику питания.
При стационарном применении заявляемую крано-манипуляторную установку размещают не на шасси автомобильного транспортного средства, а на специальной подставке, снабженной соответствующими присоединительными элементами. При этом в качестве опорно-установочной базы указанной установки может быть использовано то же самое рамное основание ее опорно-поворотного устройства. Только в данном случае выносные аутригеры указанного устройства не задействуются. Это позволяет использовать заявляемую крано-манипуляторную установку без каких либо ограничений, для любых условий ее применения. В принципе для стационарного варианта работы заявляемой крано-манипуляторной установки, преимущественно по желанию заказчика или иным причинам, рамное основание опорно-поворотного устройства рассмотренного типа может быть заменено его модификацией упрощенного конструктивного исполнения, например с плоской опорно-установочной базой в виде плиты необходимых размеров с соответствующими монтажно-присоединительными элементами.
Заявляемая крано-манипуляторная установка имеет относительно несложную кинематику и невысокую цену. Она непритязательна в обслуживании, удобна в управлении и отвечает всем требованиям безопасности, предусматриваемым для данного рода техники соответствующими нормативными документами.
В конструкции заявляемой крано-манипуляторной установки использованы широко применяемые в краностроении отечественные материалы и подавляющее большинство из комплектующих изделий, рациональные технические решения и типовые технологии изготовления.
С учетом этого, а также соответствующих требований, предъявляемых ГОСГОР-ТЕХНАДЗОРом к подобного рода продукции, она может быть многократно воспроизведена по разработанной на нее документации в условиях серийного производства на специализированных машиностроительных заводах, располагающих необходимым оборудованием, персоналом и соответствующей нормативно-разрешающей базой.
В настоящее время в ЗАО "НК Уралтерминалмаш" разработана конструкторская документация, по которой изготовлен полноразмерный действующий опытный образец заявляемой крано-манипуляторной установки С-75К с максимальным вылетом стрелы 6,27 м и грузоподъемностью (на всех вылетах) 0,5 т.
Эффективность заложенных в конструкцию заявляемой крано-манипуляторной установки технических решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в упрощении конструкции и улучшении ее технико-эксплуатационных качеств, подтверждены соответствующими расчетами и результатами натурных испытаний действующего опытного образца.
Решение о серийном производстве заявляемой крано-манипуляторной установки будет принято после всестороннего апробирования ее в реальных условиях эксплуатации на полигонах заказчика в составе специализированного подъемно-транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
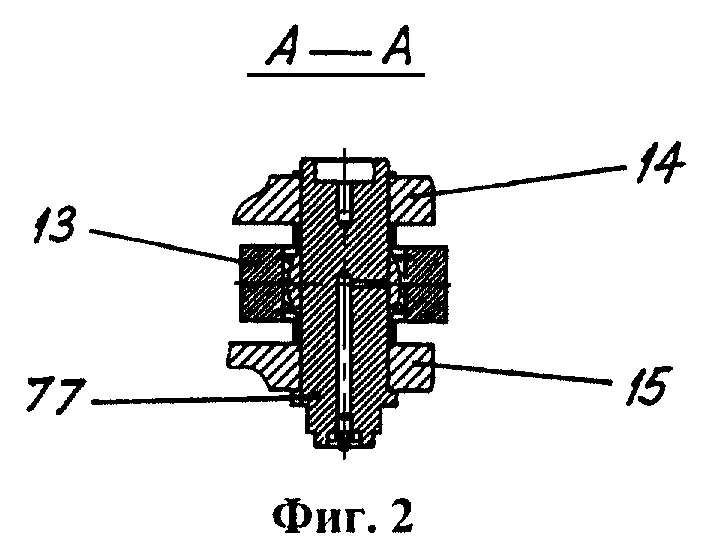
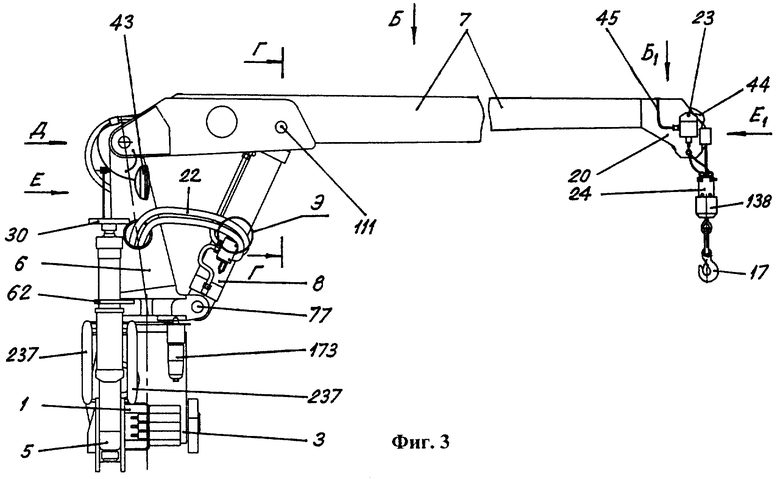
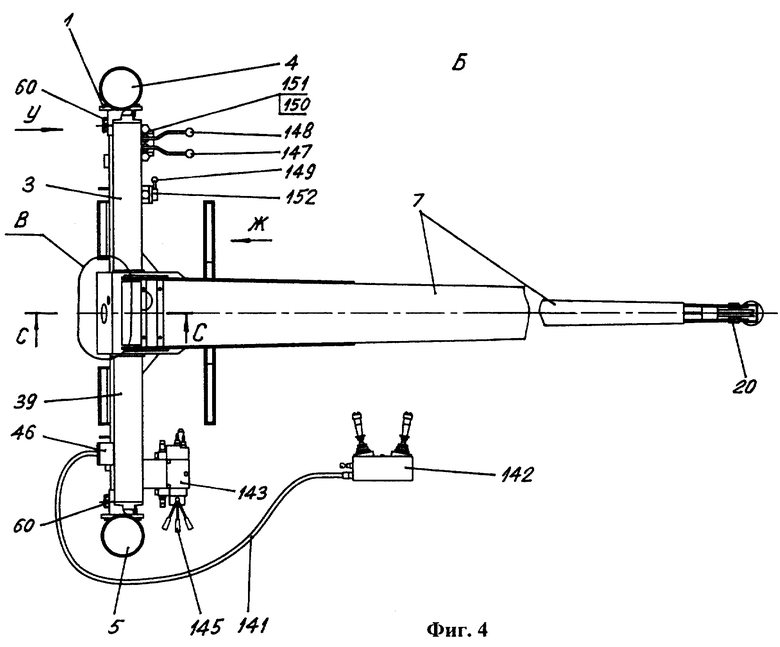
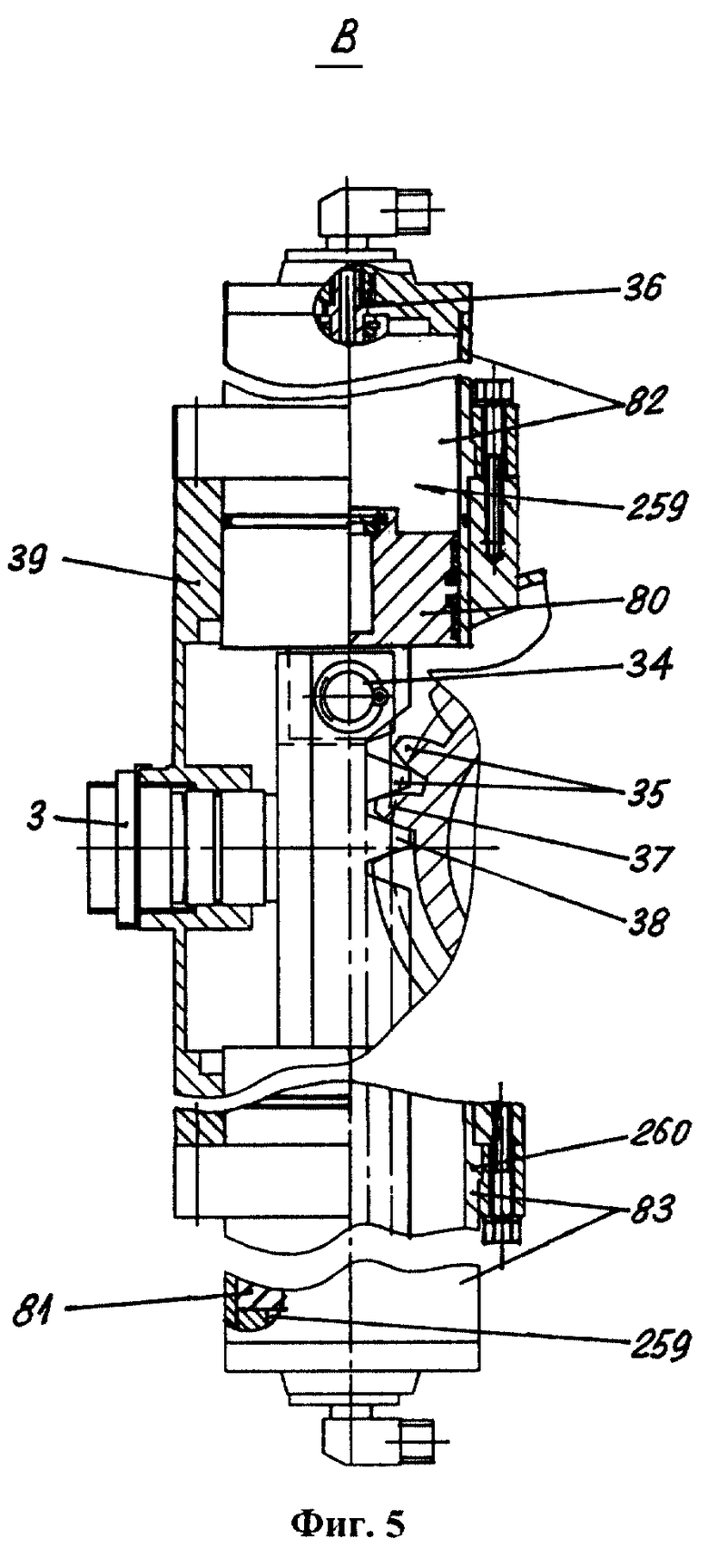


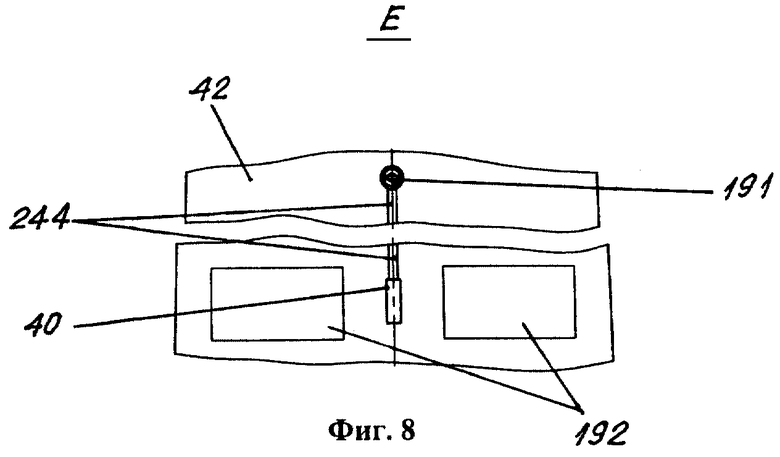
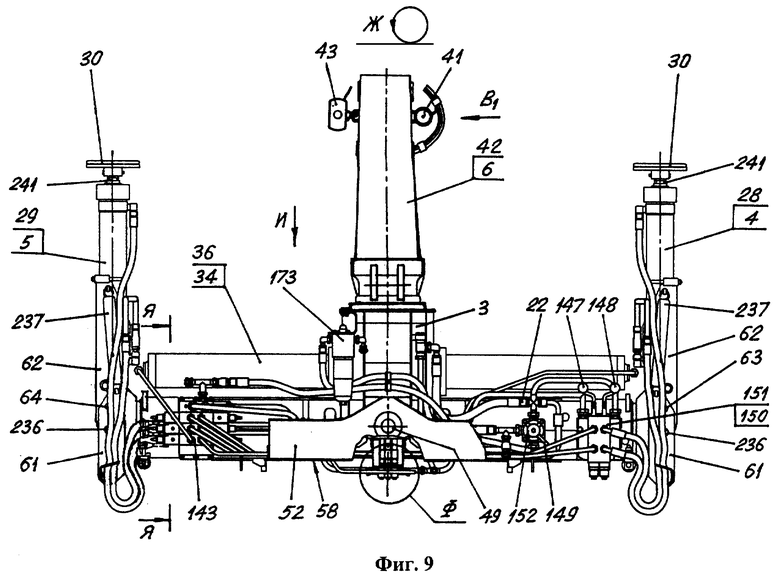
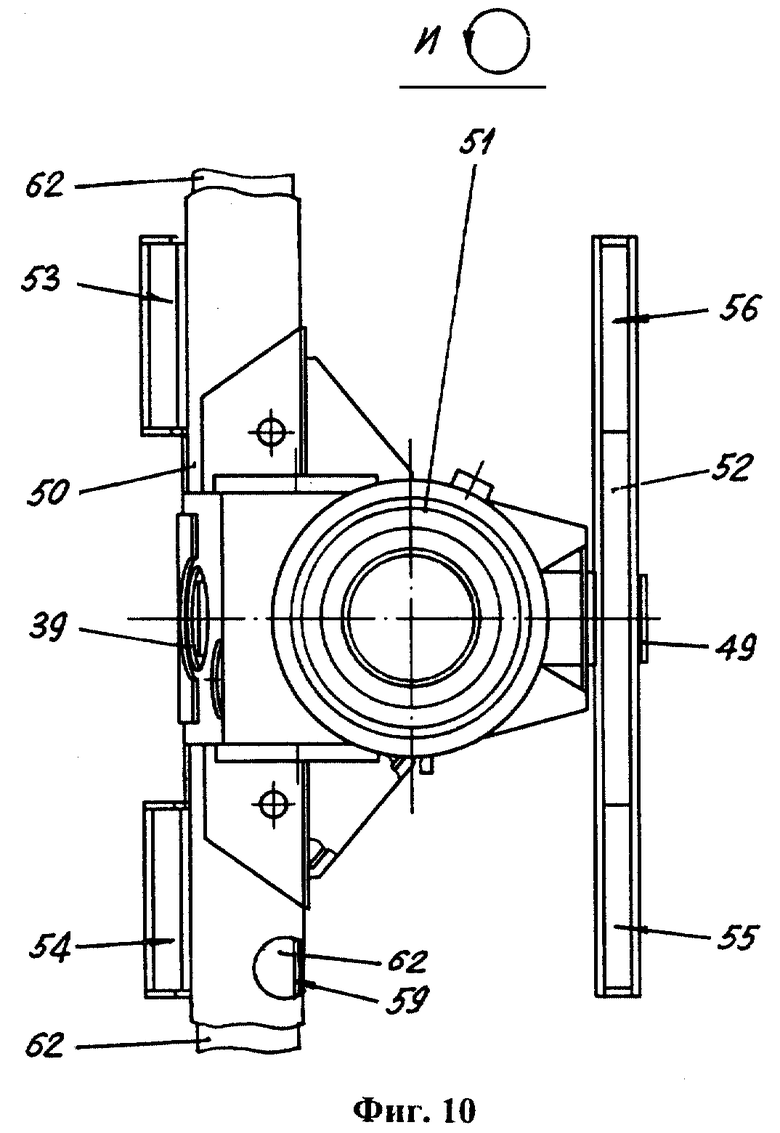
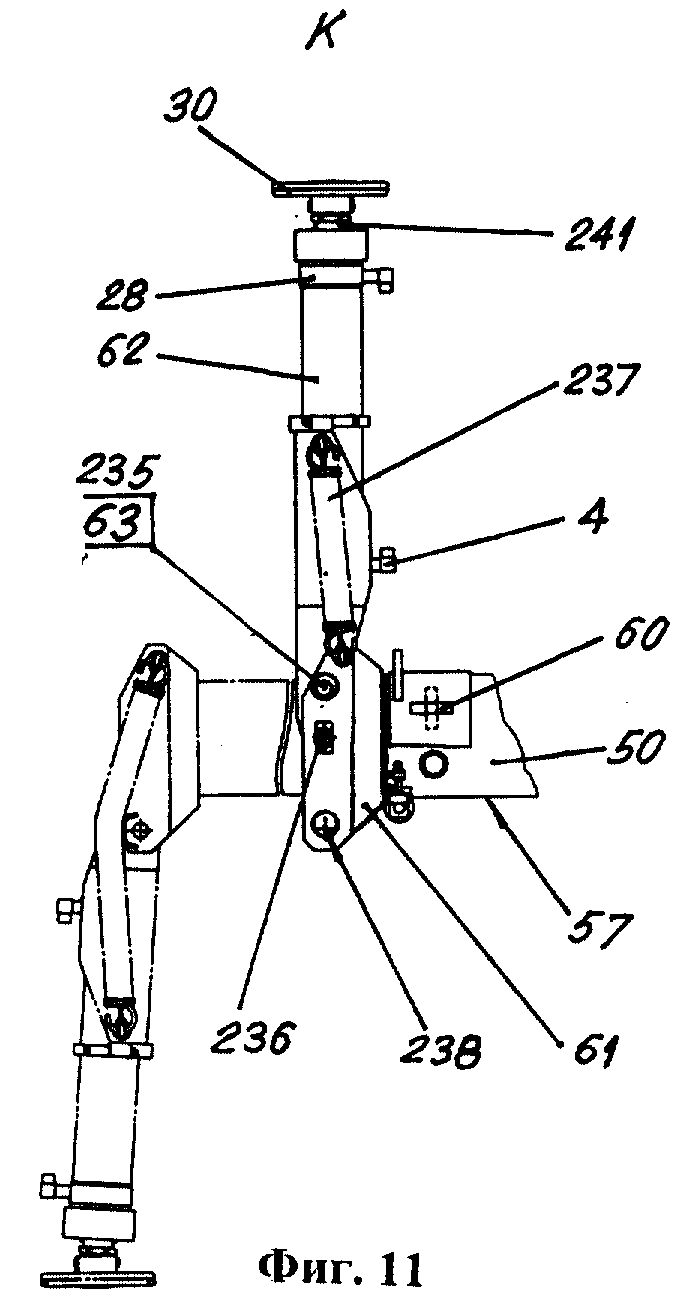
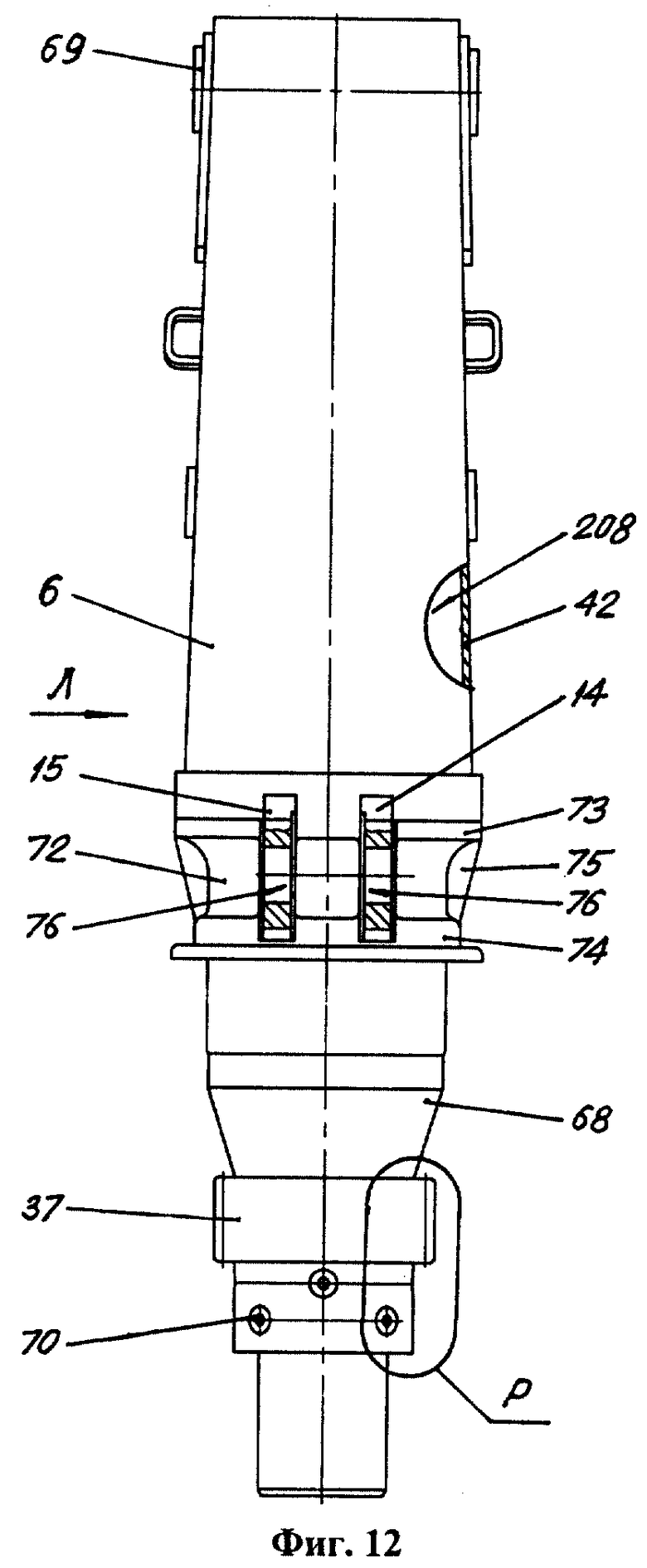

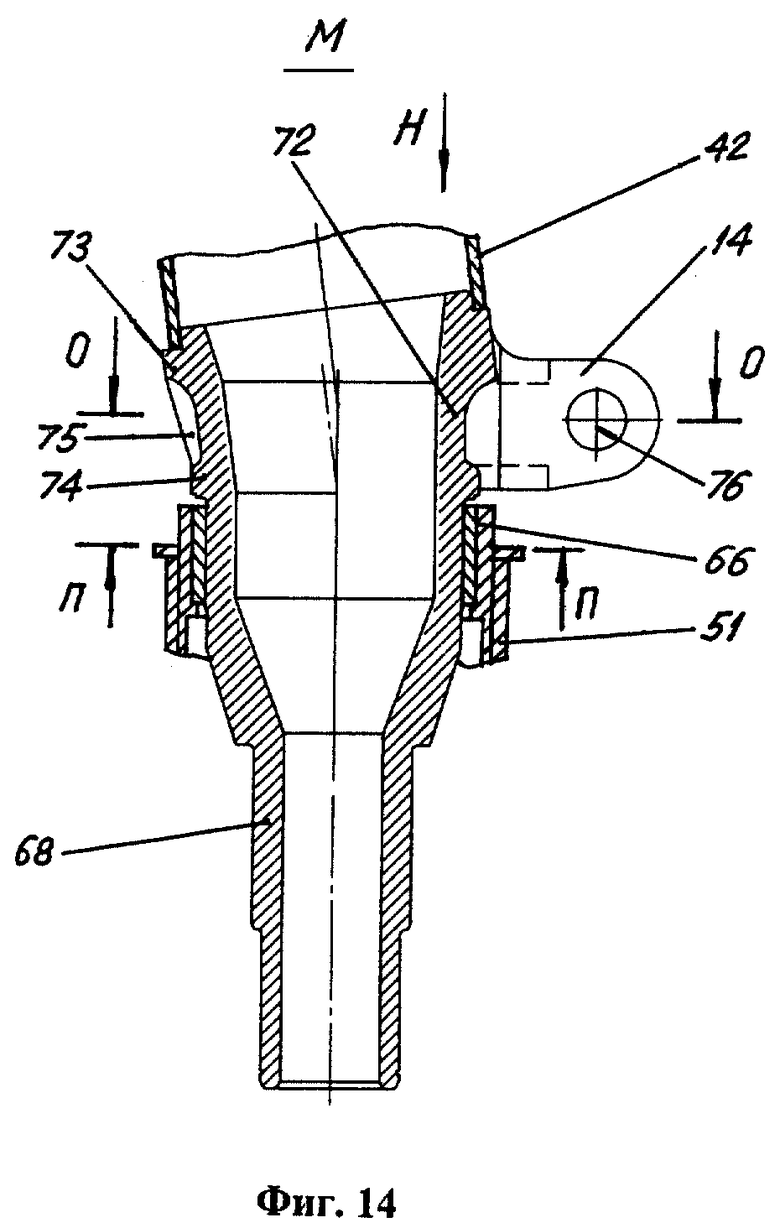
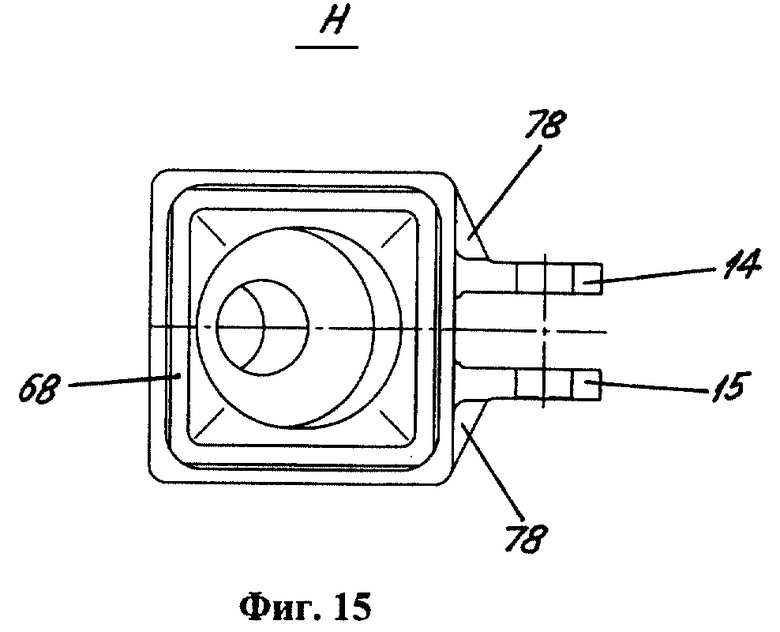
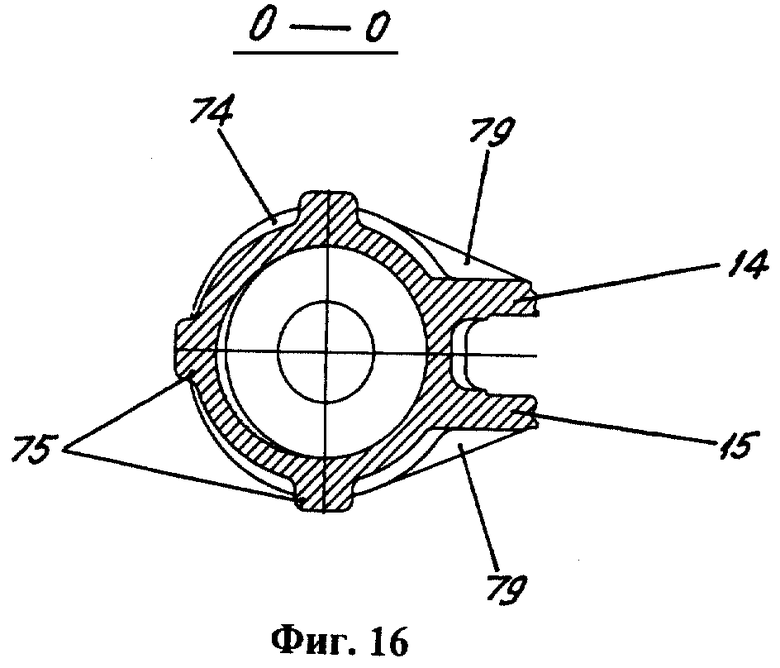
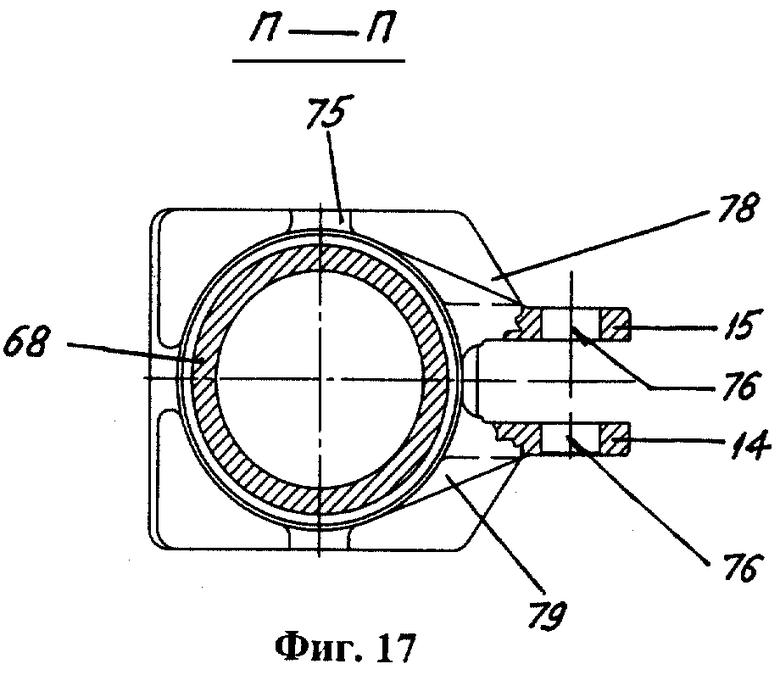
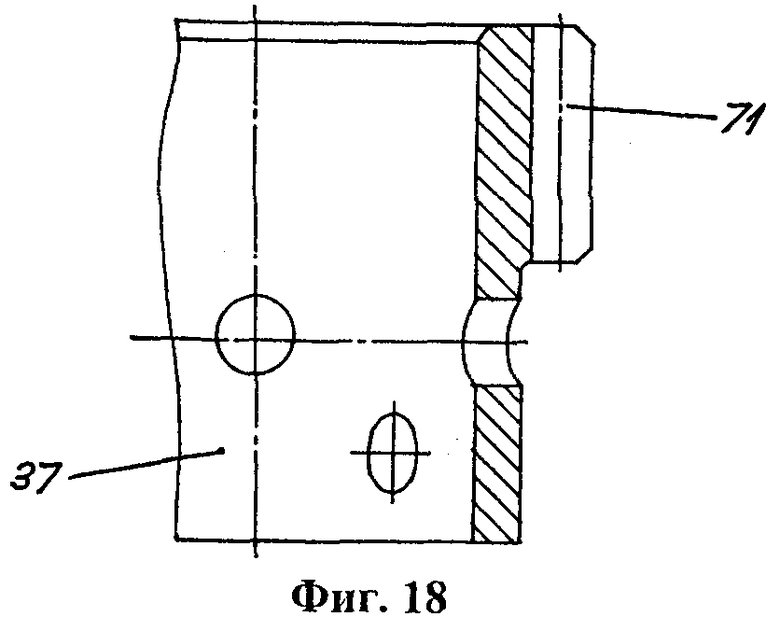

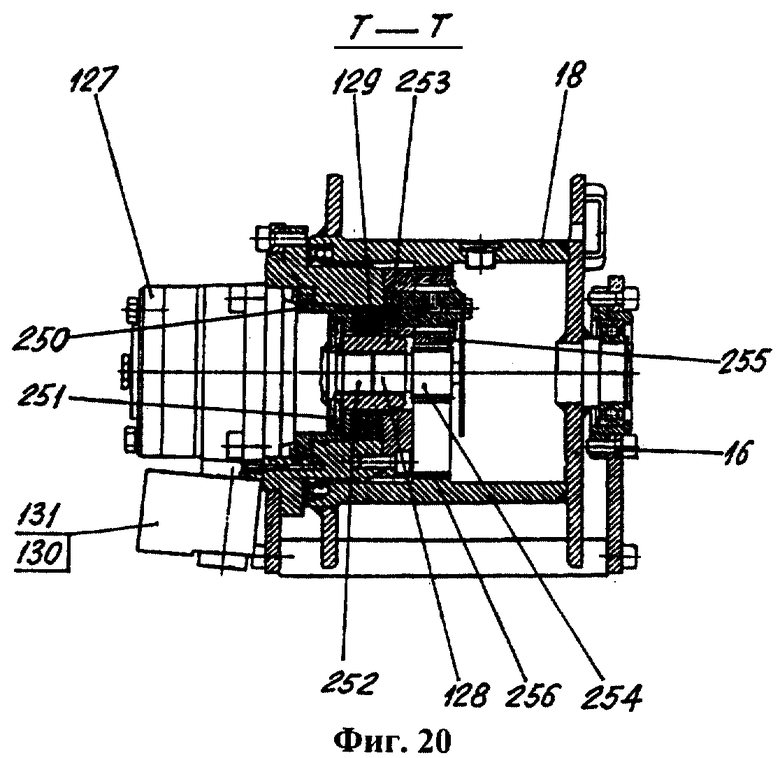
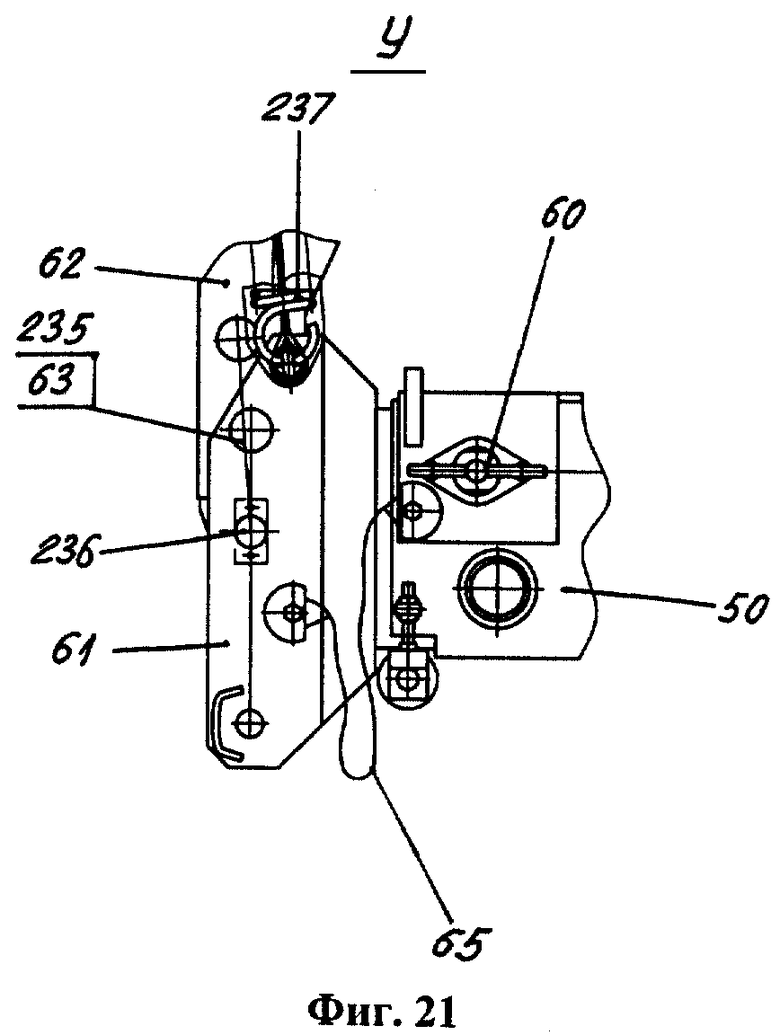
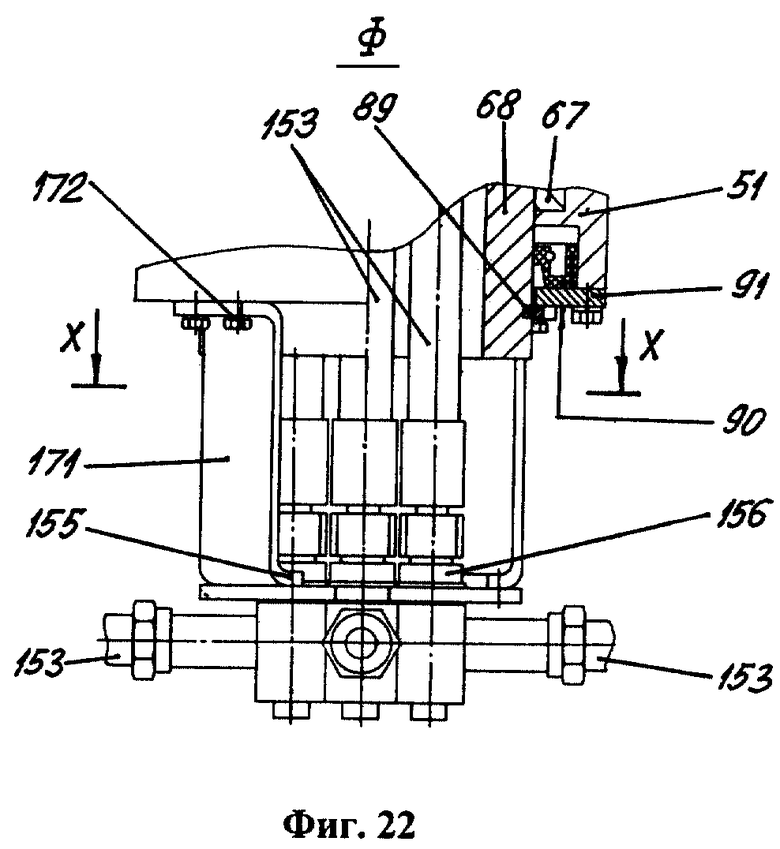

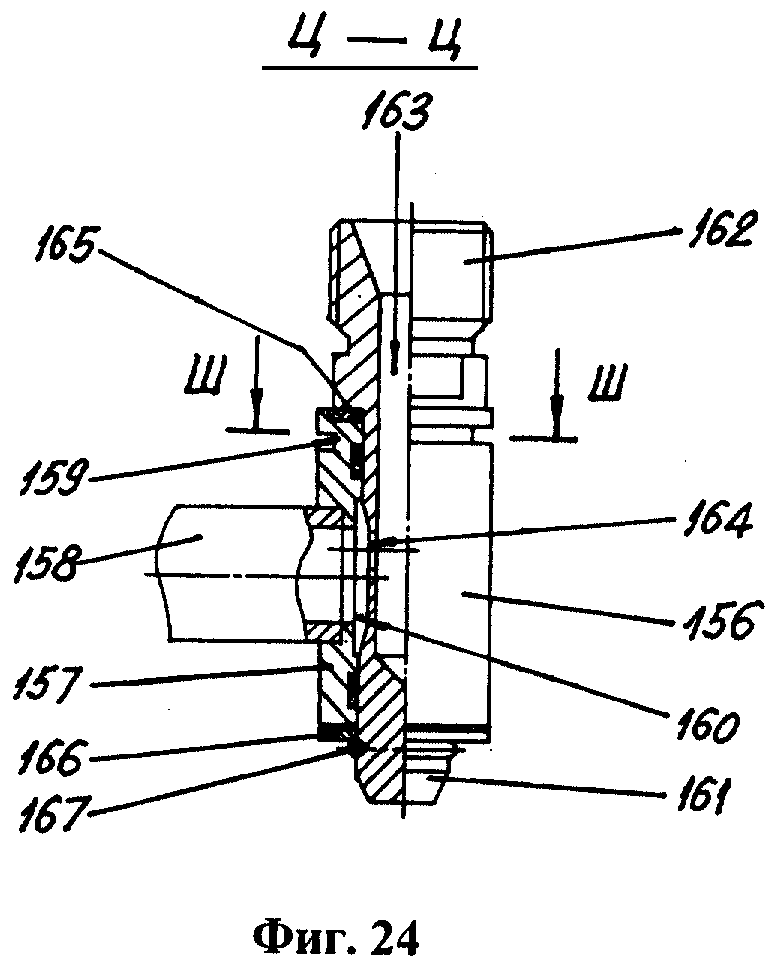
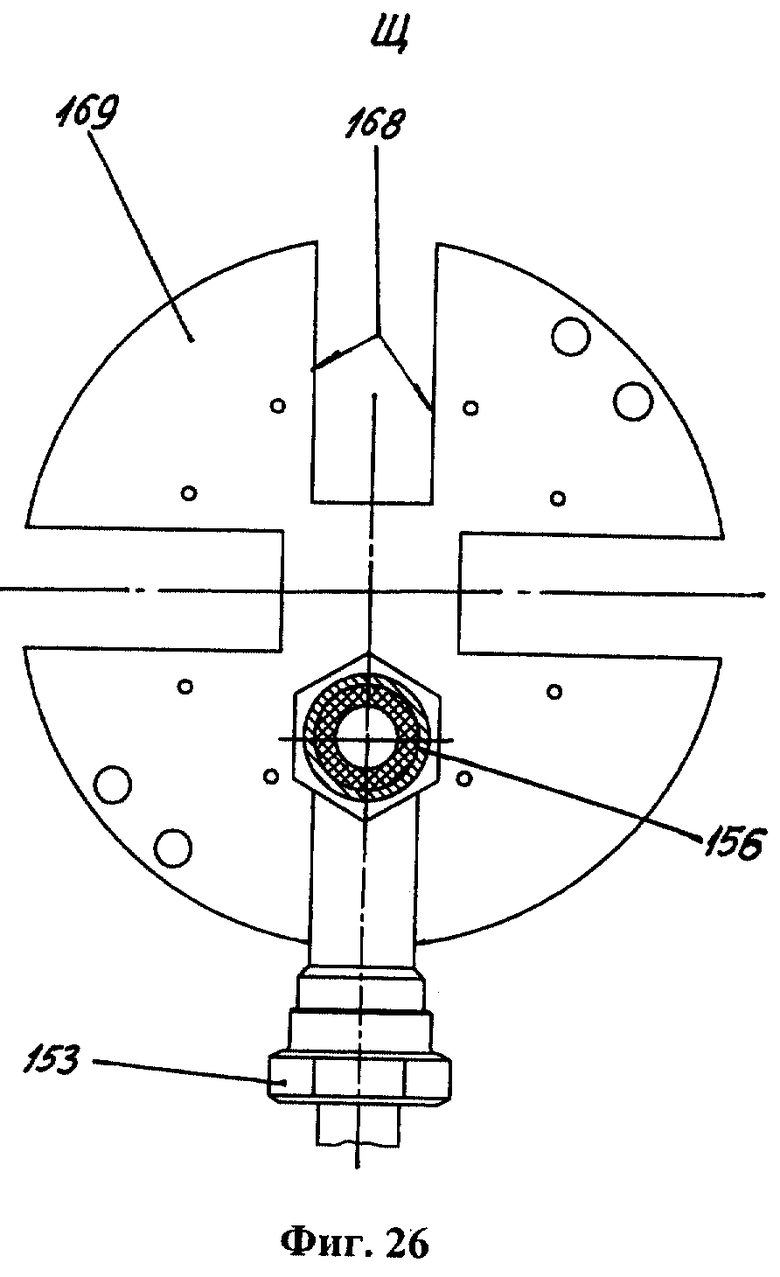
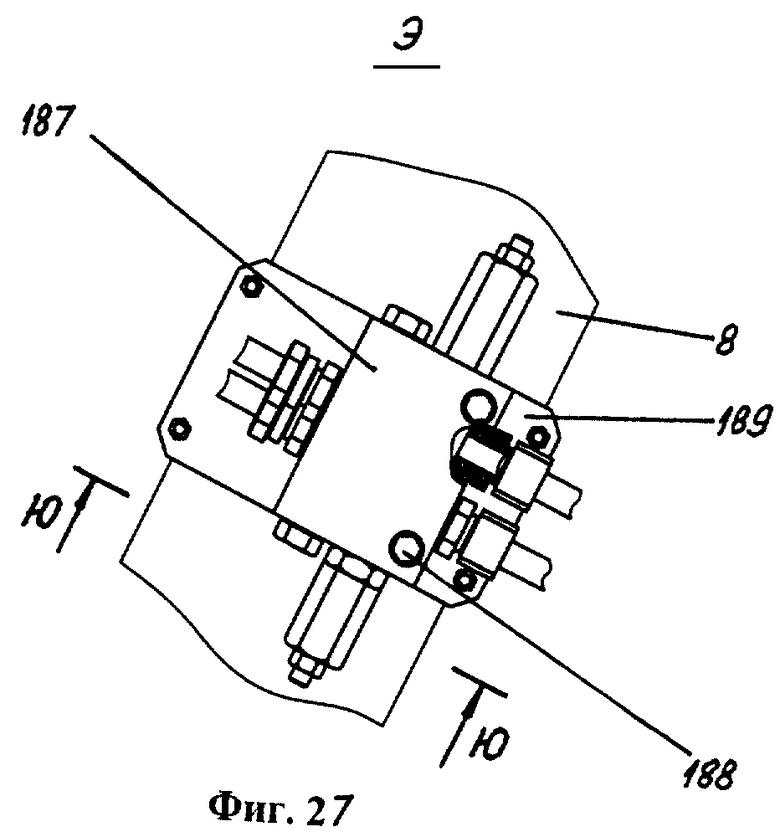

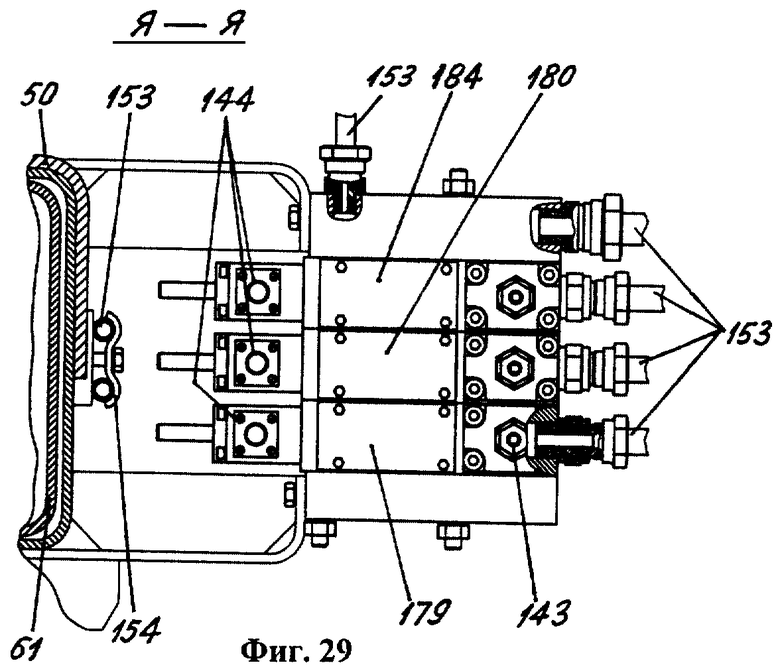
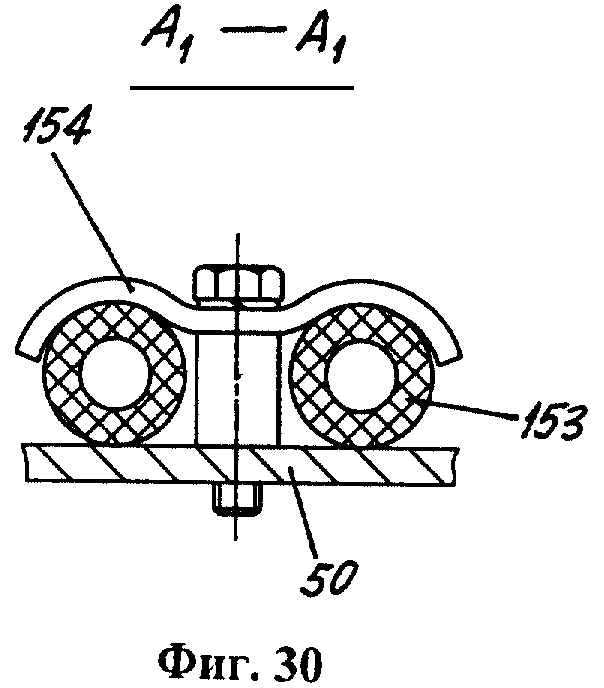
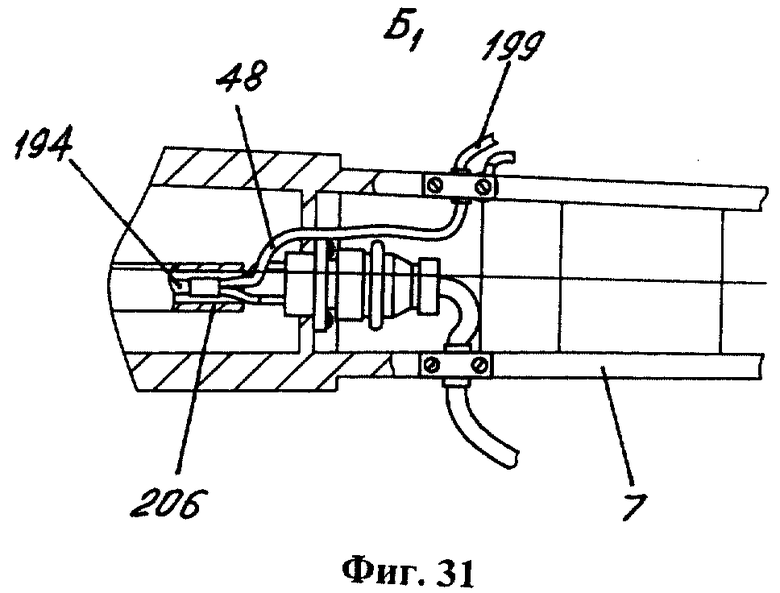
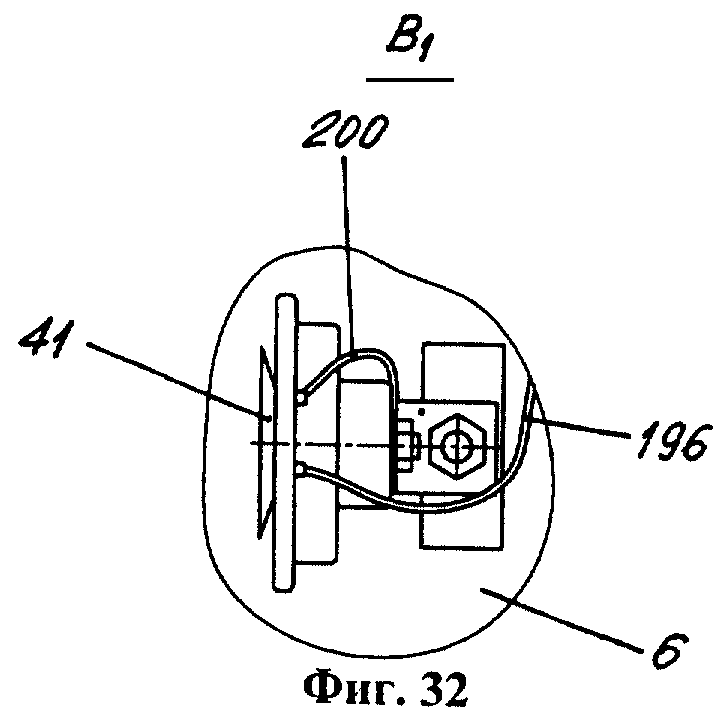
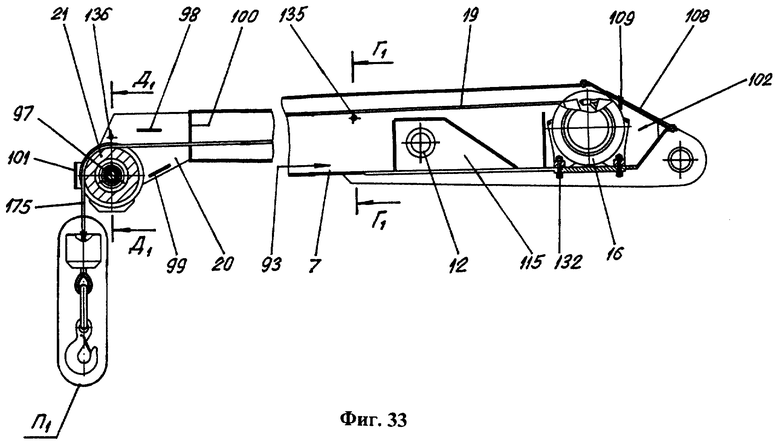
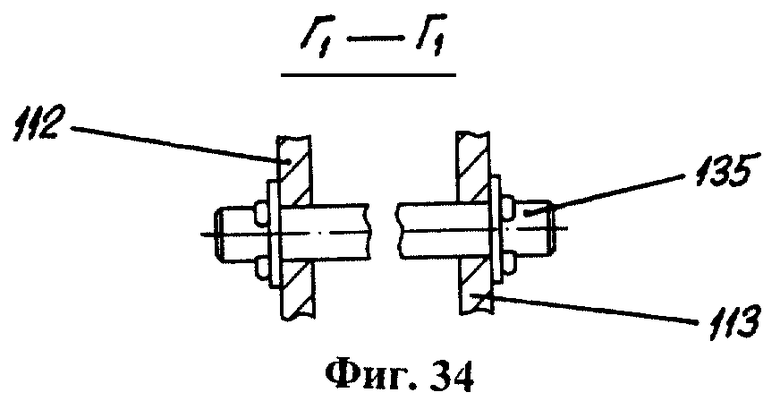
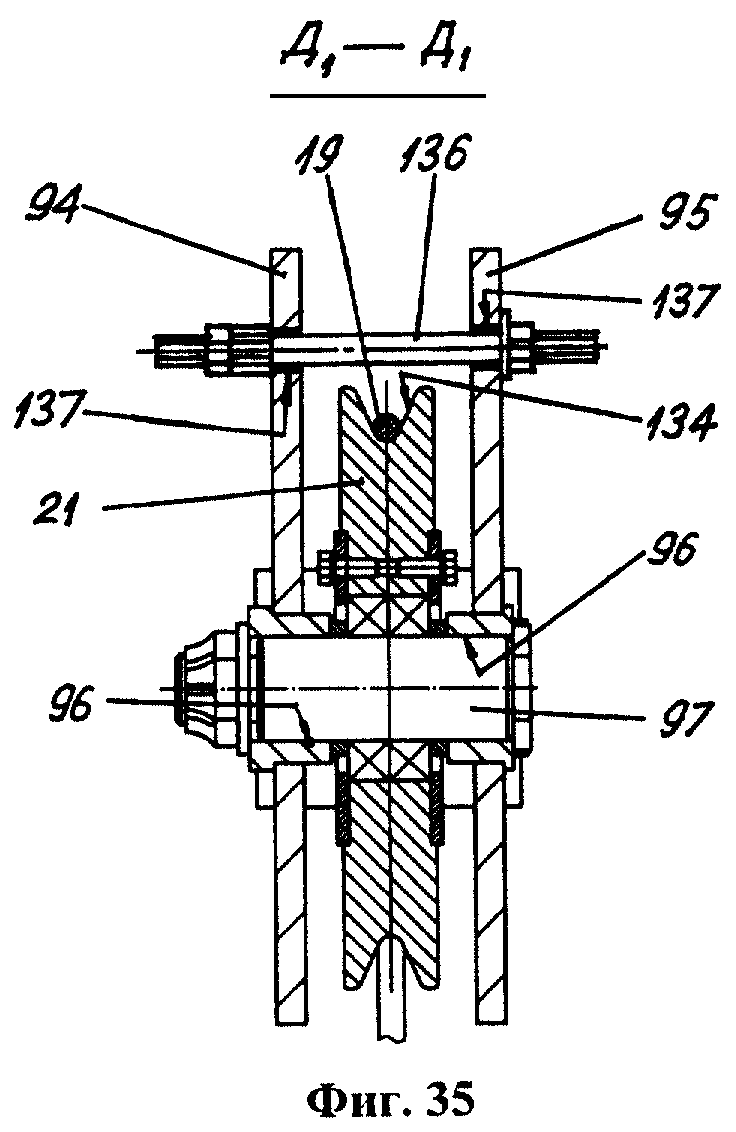
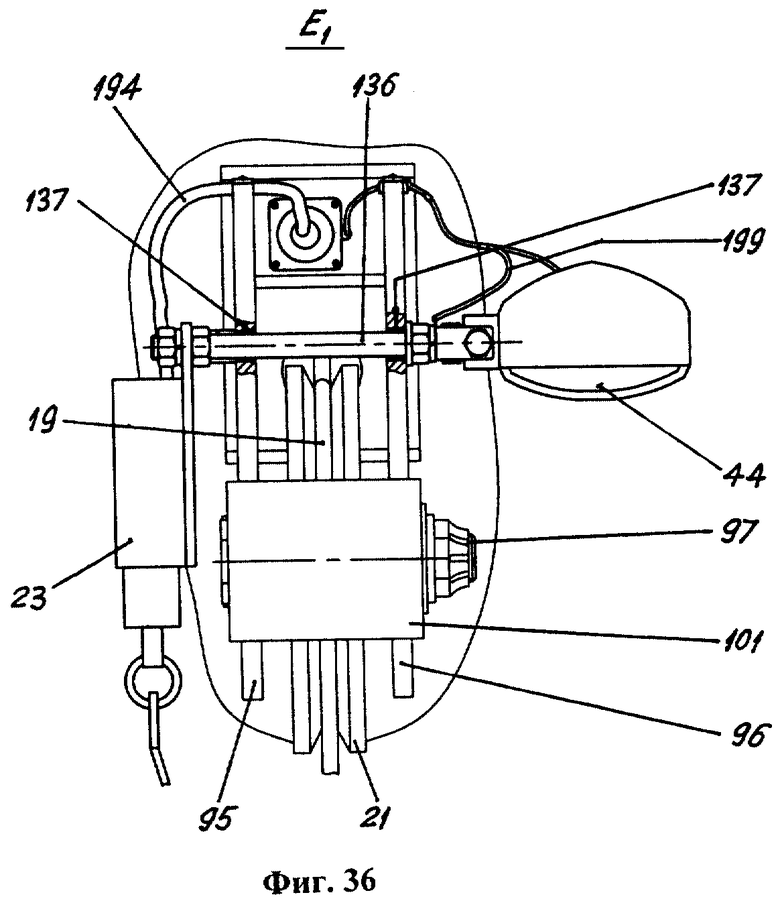
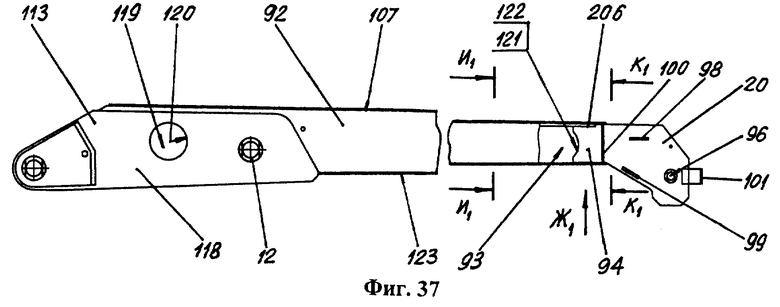
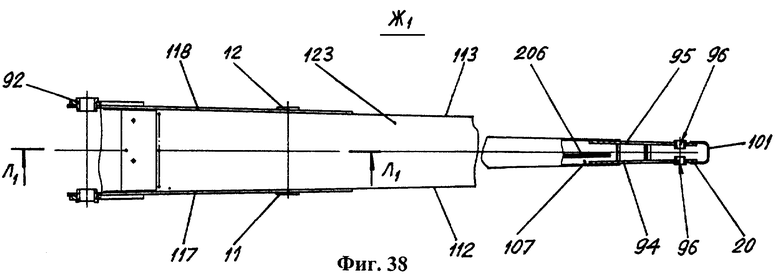



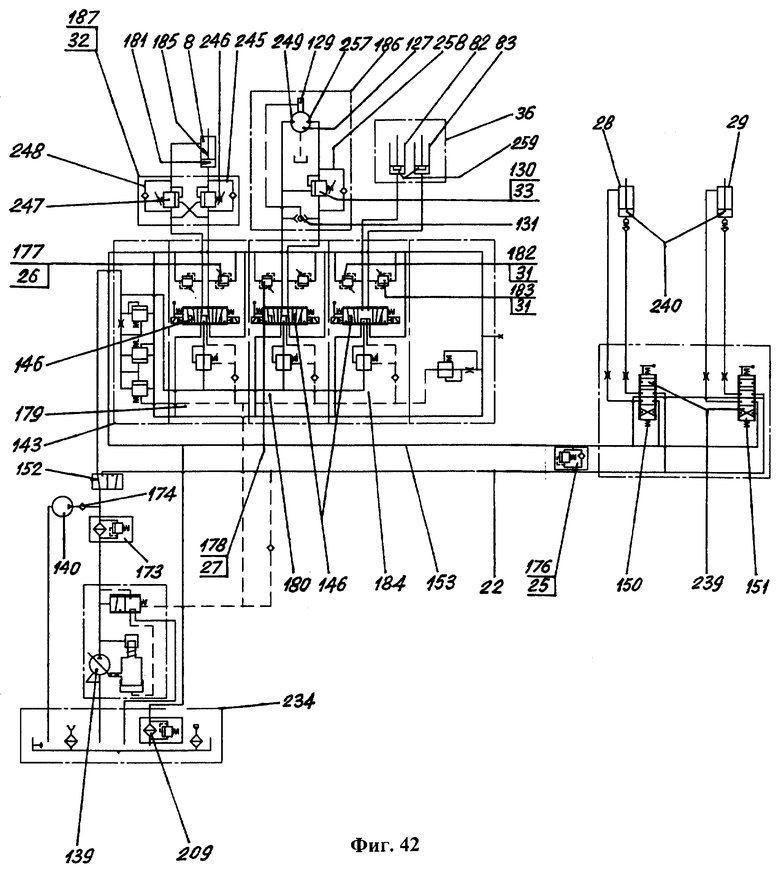
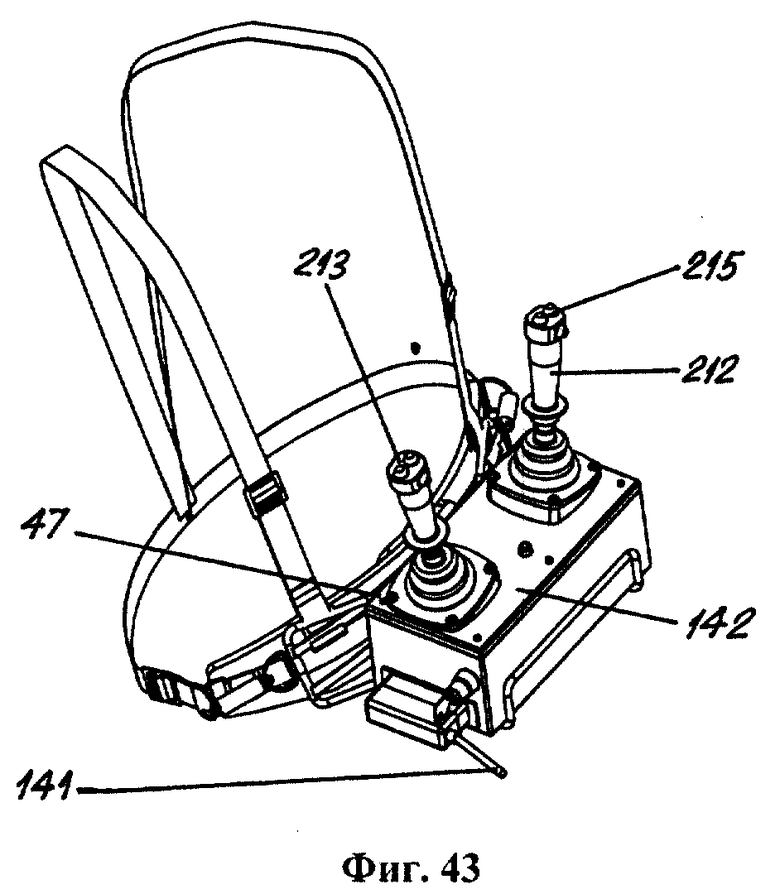

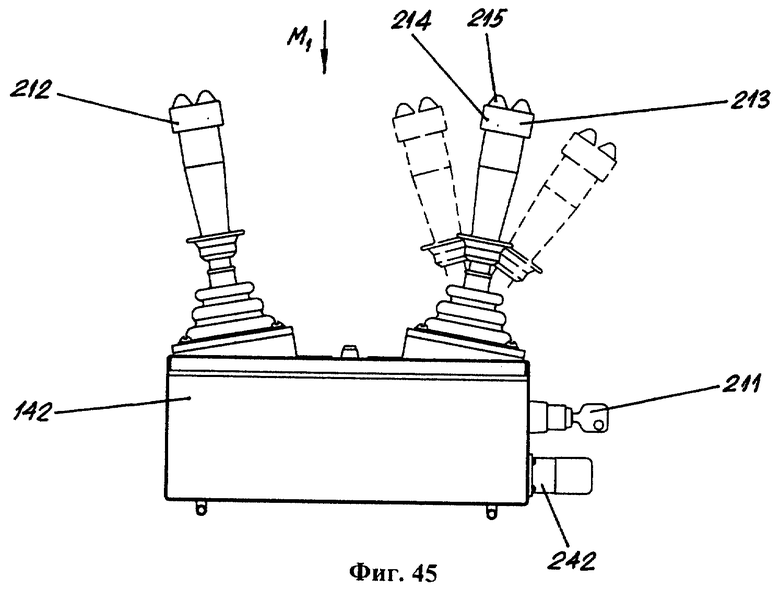
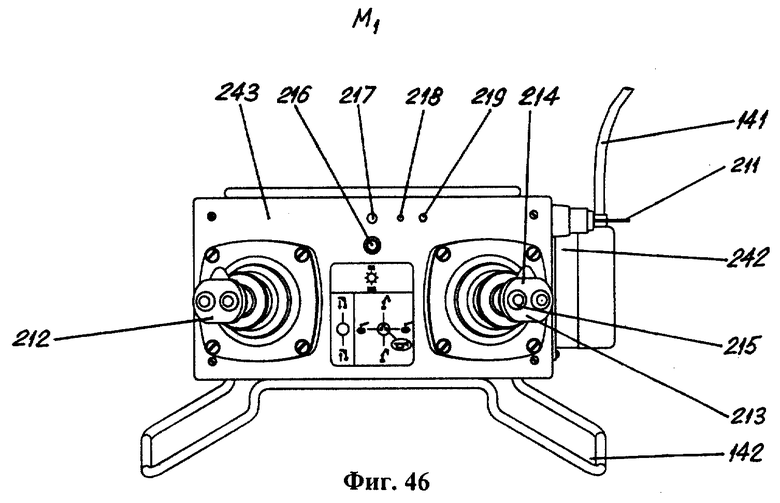

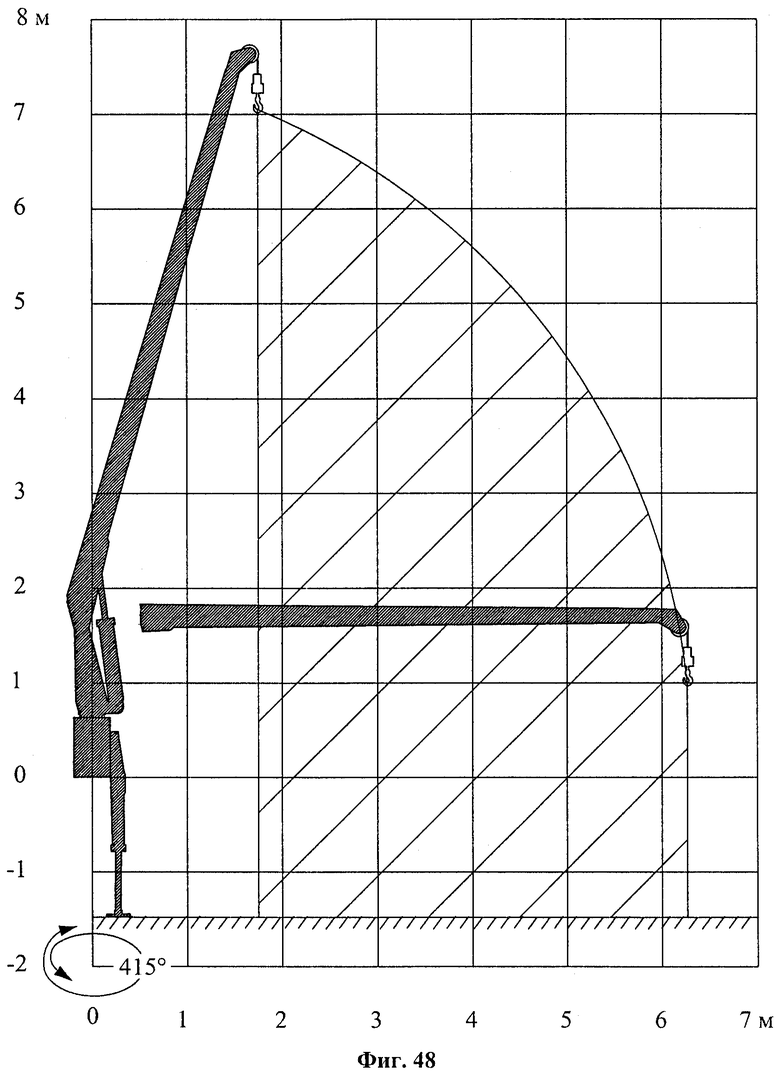

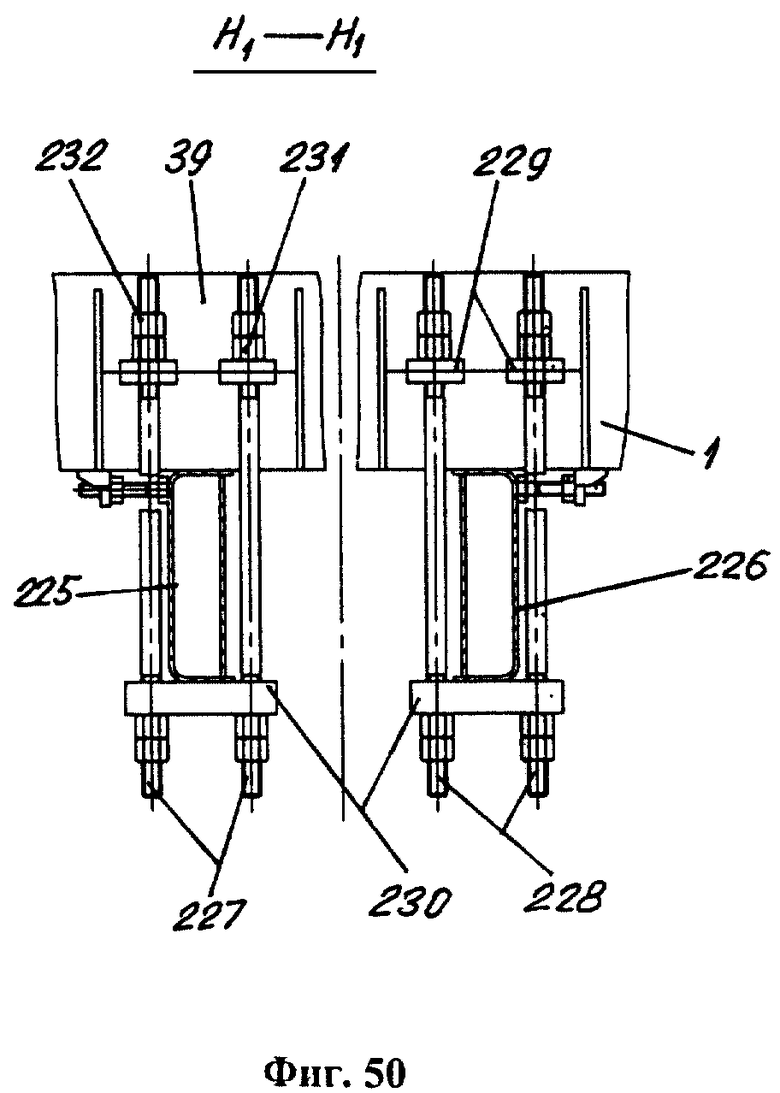
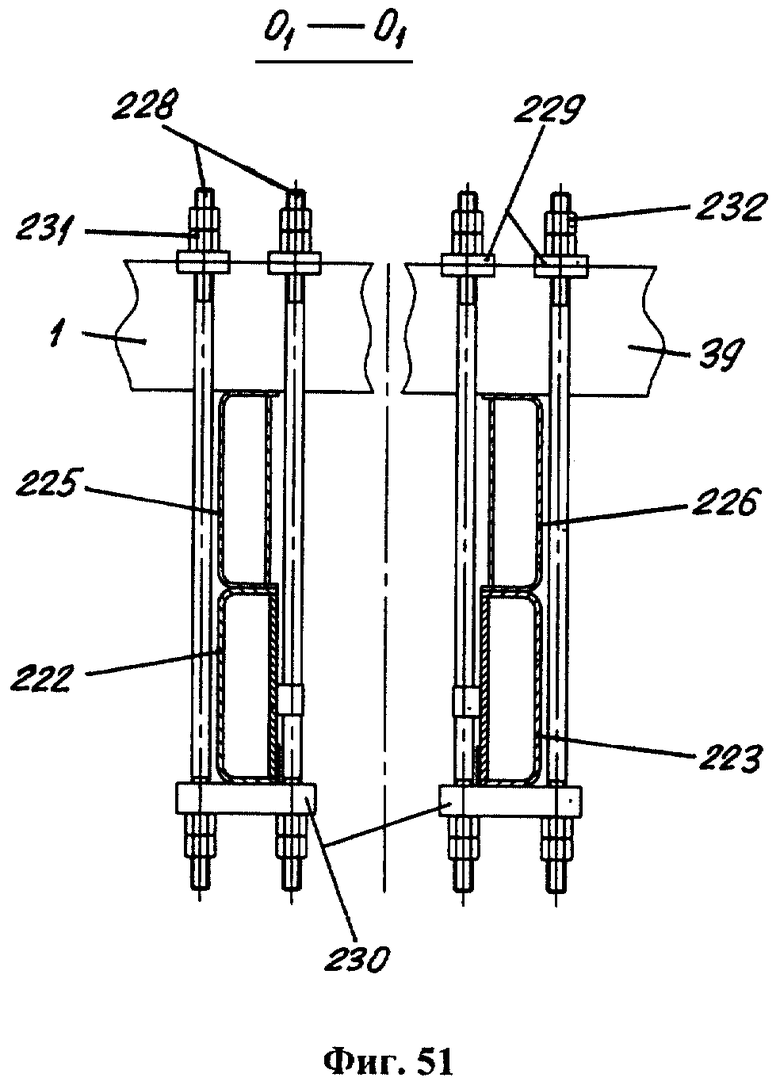

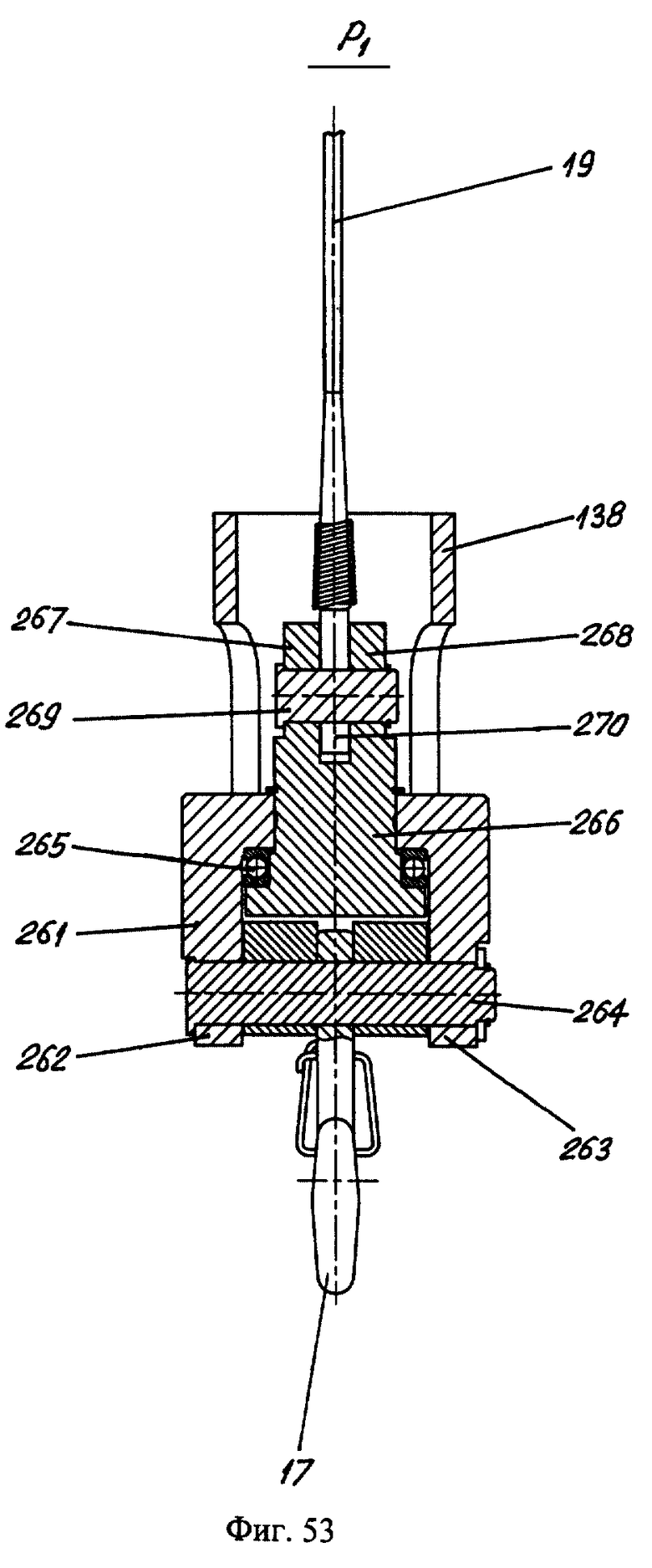
Изобретение относится к области грузоподъемного оборудования, а именно к крано-манипуляторным установкам для выполнения, преимущественно в составе специализированных подъемно-транспортных средств, погрузочно-разгрузочных и монтажных работ. Крано-манипуляторная установка содержит опорно-поворотное устройство с выносными аутригерами, односекционную стрелу с размещенной внутри нее гидравлической грузоподъемной лебедкой, гидросистему, соответствующие средства безопасности электромеханического и гидравлического типов и электросистему. В указанной установке оптимизированы, в части упрощения и улучшения технико-эксплуатационных качеств, выносные аутригеры, конструкция поворотной части опорно-поворотного устройства, стрелы, а также гидро- и электросистемы и другие узлы. Установка снабжена также фарами-прожекторами для освещения крюка и места проведения работ, которые установлены на корпусе поворотной части опорно-поворотного устройства и головке стрелы. Технический результат – улучшение условий эксплуатации установки. 13 з.п. ф-лы, 53 ил.

| Александров М.П | |||
| Подъемно-транспортные машины: Учебник для вузов.-М.: Высшая школа, 1979, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| US 4461369 A, 24.07.1984 | |||
| МАНИПУЛЯТОР | 1991 |
|
RU2037464C1 |

