Изобретение относится к области железнодорожной автоматики и может быть использовано для интервального регулирования движения поездов.
Известна система управления движением поездов на железнодорожном транспорте, содержащая стационарное оборудование и бортовое оборудование, установленное на локомотивах поездов, вовлеченных в систему управления, стационарное оборудование включает радиоблокцентры, сеть цифровой радиосвязи, устройства электрической микропроцессорной централизации и автоблокировки с тональными рельсовыми цепями и многозначной частотной автоматической локомотивной сигнализацией АЛС-ЕН без проходных светофоров на перегоне и светофорами на станции для поездных и маневровых передвижений, устройства телеуправления и телесигнализации диспетчерской централизации, объединенные магистральной линией связи и связанные с устройствами электрической микропроцессорной централизации, систему технической диагностики и мониторинга и реперные датчики, в качестве которых используют генераторы тональных рельсовых цепей, бортовое оборудование каждого поезда включает бортовое устройство управления и безопасности, входы которого через соответствующие интерфейсы подключены к выходам модуля приема навигационных сигналов, модуля приема сигналов рельсовой цепи и датчиков пути и скорости, выходы - к входам блока индикации и системы торможения поезда, а входы/выходы - к выходам/входам модуля радиосвязи и блока синхронизации, вход которого подключен ко второму выходу модуля приема навигационных сигналов, при этом радиоблокцентры соседних зон управления через соответствующие интерфейсы связаны между собой, а также с устройствами микропроцессорной централизации и автоблокировки, установленными в зоне его управления, и аппаратно-программным устройством автоматизированного рабочего места поездного диспетчера, другие входы/входы которого через блоки сопряжения подключены к соответствующим выходам/входам устройств телеуправления и телесигнализации диспетчерской централизации, причем устройства автоблокировки связаны с устройствами микропроцессорной централизации, другие входы/выходы аппаратно-программного устройства автоматизированного рабочего места поездного диспетчера через защитный узел межсетевого взаимодействия подключены к железнодорожной сети передачи данных для информационного взаимодействия с аппаратно-программными устройствами внешних систем управления перевозочным процессом, входы/выходы аппаратно-программного устройства оператора системы технической диагностики и мониторинга подключены к входам/выходам модулей технической диагностики и мониторинга устройств микропроцессорной централизации и автоблокировки, а также к соответствующим выходам/входам радиоблокцентров, каждый из которых связан по сети цифровой радиосвязи с модулем радиосвязи бортового оборудования поезда в зоне своего управления, радиоблокцентры и бортовые устройства управления и безопасности выполнены в виде аппаратно-программных вычислительных комплексов, память которых включает идентичную цифровую электронную карту с базой путевых данных, уклонов, участков постоянных ограничений скорости, а также с расположением генераторов тональной частоты с указанием для каждого из них его идентификационного номера, значения его несущей и моделирующих частот, линейной и географической координат, а программное обеспечение каждого устройства управления и безопасности дополнительно включает функцию определения идентификационного номера генератора тональной частоты и его местонахождения на основе цифровой электронной карты. (EA201700599, B61L 27/04, 28.06.2019).
Известная система не обеспечивают требуемый для высокоскоростного пассажирского движения уровень безопасности и надежности из-за недостаточной глубины взаимного резервирования входящих в них подсистем.
В качестве прототипа принята система интервального регулирования движения поездов содержащая на каждом локомотиве в устройстве управления движением модуль обработки данных, к первому входу которого подключен навигационный приемник, а выход соединен с дисплеем, радиомодем, соединенный по радиоканалу с установленным в хвостовом вагоне радиомодемом, соединенным с микропроцессором, на локомотиве установлены программный модуль расчета координаты места нахождения хвостового вагона впереди идущего поезда, программный модуль контроля следования впереди идущего поезда в полном составе, блок памяти с записанной в ней электронной картой и датчики пути и скорости, при этом датчики пути и скорости своими выходами соединены с входами программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда и программного модуля контроля следования впереди идущего поезда в полном составе, входы/выходы которых подключены к соответствующим выходам/входам радиомодема, выход программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда соединен со вторым входом модуля обработки данных, а выход программного модуля контроля следования впереди идущего поезда в полном составе соединен с дополнительным входом дисплея, а на хвостовом вагоне установлен инерциальный датчик измерения ускорений движения вагона, который подключен к микропроцессору (RU2725332, B61L 23/34, 02.07.2020).
Известная система не обеспечивает требуемый для высокоскоростного пассажирского движения уровень безопасности и надежности из-за недостаточной глубины взаимного резервирования входящих в нее подсистем и отсутствия согласованного управления поездами из общего центра диспетчерского управления.
Технический результат изобретения заключается в повышении безопасности и надежности за счет осуществления приоритетного управления движением поездов путем эффективного использования возможностей взаимного резервирования различных подсистем в различных эксплуатационных ситуациях.
Технический результат достигается тем, что в системе интервального регулирования движения поездов, содержащей на каждом локомотиве в устройстве управления движением модуль обработки данных с подключенными к нему навигационным приемником, блоком памяти, с записанной в нем электронной картой маршрутов движения и участков выдачи и отмены ограничений скорости, программным модулем расчета координаты места нахождения хвостового вагона и дисплеем, к дополнительному входу которого подключен выход программного модуля контроля следования поезда в полном составе, при этом входы программного модуля расчета координаты места нахождения хвостового вагона и программного модуля контроля следования поезда в полном составе соединены с выходами датчиков пути и скорости, а их входы/выходы подключены к соответствующим выходам/входам радиомодема, который по радиоканалу соединен с установленным в блоке электроники хвостового вагона радиомодемом, соединенным с микропроцессором, к которому подключен инерциальный датчик измерения ускорений движения вагона, согласно изобретению на каждом локомотиве установлен второй радиомодем, который по криптографически защищенным каналам радиосвязи соединен с приемопередатчиком зонального центра радиоблокировки, подключенным к вычислительному устройству, при этом вход/выход второго радиомодема соединен с выходом/входом модуля обработки данных, вход которого подключен к выходу приемника комплексного сигнала АЛС и КРЛ, вход которого посредством индуктивного канала связи и рельсовой линии соединен с выходами путевых генераторов комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты, второй выход/вход модуля обработки данных соединен с входом/выходом блока проверки соответствия данных, поступающих на модуль обработки данных, дополнительный вход которого подключен к выходу блока проверки соответствия данных.
На чертеже приведена функциональная схема системы интервального регулирования движения поездов.
Система интервального регулирования движения поездов содержит на каждом локомотиве 1 в устройстве 2 управления движением модуль 3 обработки данных с подключенными к нему навигационным приемником 4, блоком 5 памяти, с записанной в нем электронной картой маршрутов движения и участков выдачи и отмены ограничений скорости, программным модулем 6 расчета координаты места нахождения хвостового вагона и дисплеем 7, к дополнительному входу которого подключен выход программного модуля 8 контроля следования поезда в полном составе, при этом входы программного модуля 7 расчета координаты места нахождения хвостового вагона и программного модуля 8 контроля следования поезда в полном составе соединены с выходами датчиков 9 пути и скорости, а их входы/выходы подключены к соответствующим выходам/входам радиомодема 10, который по радиоканалу соединен с установленным в блоке 11 электроники хвостового вагона 12 радиомодемом 13, соединенным с микропроцессором 14, к которому подключен инерциальный датчик 15 измерения ускорений движения вагона, дополнительно на каждом локомотиве 1 установлен второй радиомодем 16, который по криптографически защищенным каналам радиосвязи соединен с приемопередатчиком 17 зонального центра 18 радиоблокировки, подключенным к вычислительному устройству 19, при этом вход/выход второго радиомодема 16 соединен с выходом/входом модуля 3 обработки данных, вход которого подключен к выходу приемника 20 комплексного сигнала АЛС и КРЛ, вход которого посредством индуктивного канала связи и рельсовой линии 21 соединен с выходами путевых генераторов 22 комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты, второй выход/вход модуля 3 обработки данных соединен с входом/выходом блока 23 проверки соответствия данных, поступающих на модуль 3 обработки данных, дополнительный вход которого подключен к выходу блока 23 проверки соответствия данных.
Система интервального регулирования движения поездов функционирует следующим образом.
Безопасное интервальное регулирование движения поездов на перегонах без напольных светофоров обеспечивается путем взаимодействия по криптографически защищенным каналам радиосвязи
зонального центра 18 радиоблокировки с бортовым устройством 2 управления движением поезда, находящегося в зоне его управления, посредством приемопередатчика 17 и второго радиомодема 16 каждого поезда. Приемопередатчик 17 передает на поезд данные системного номера и идентификационного номера поезда, запросы текущих измеренных и расчетных данных о параметрах движения поезда для выработки адресной команды управления движением поезда в соответствии с оптимальным графиком его движения. Зональный центр радиоблокировки осуществляет контрольные расчёты для определения фактических интервалов между поездами и допустимых скоростей движения поезда по необходимому тормозному пути служебного торможения, для определения свободного состояния пути и целостности проследовавшего состава (контроль длины состава).
Вычислительное устройство 19 зонального центра 18 радиоблокировки и устройство 2 управления движением выполнены в виде аппаратно-программных вычислительных комплексов, память которых включает идентичную цифровую электронную карту с базой путевых данных, уклонов, участков постоянных ограничений скорости, а также с расположением путевых генераторов 22 комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты, с указанием для каждого из них его идентификационного номера, значения его несущей и моделирующих частот, линейной и географической координат. Программное обеспечение каждого устройства управления движением дополнительно включает функцию определения идентификационного номера генератора 22 и его местонахождения на основе цифровой электронной карты маршрутов движения и участков выдачи и отмены ограничений скорости, записанных в блоке 5 памяти. Текущее место нахождения головы локомотива 1 поезда определяется данными от навигационного приемника 4, с периодической точечной проверкой достоверности этих данных по известному расположению путевых генераторов 22 комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты и с непрерывной поправкой на данные измерения датчиков 9 пути и скорости. Навигационный приемник 4 является также для системы источником системного времени.
Для обеспечения устройства 2 управления на локомотиве 1 более надежной и безопасной информацией о расчетной координате места нахождения хвостового вагона 12 впереди идущего поезда расчетная координата вычисляется с коэффициентом запаса, который выбирается так, чтобы погрешности расчетов и измерений приводили только к завышению априорно известной длины поезда для оценки реального расстояния от локомотива 1 поезда до хвостового вагона 12 каждого впереди идущего поезда. Увеличение минимального интервала попутного следования поездов снижает пропускную способность железнодорожных линий с высокой интенсивностью движения поездов, поэтому приказы передаваемые поездам приемопередатчиком 17 зонального центра 18 радиоблокировки часто направлены на достижение минимальных интервалов попутного следования. Однако на поездах эти приказы могут приниматься к буквальному исполнению только если соблюдены все условия обеспечения безопасности движения. Если по причине воздействия помех или неисправностей устройство 2 управления движением локомотива 1 данного поезда определяет, что обеспечение безопасности движения на заданном уровне невозможно, его модуль 3 обработки данных самостоятельно выбирает альтернативный безопасный режим движения, например, со сниженной скоростью и увеличенными интервалами попутного следования поездов, вплоть до прицельной остановки перед препятствием.
Если локомотивный навигационный приемник 4, принимающий сигнал от спутниковой группировки, не видит достаточного количества спутников, то устройство 2 управления движением локомотива 1 использует другие данные о перемещении поезда для того, чтобы сохранить правильность измерения текущей координаты локомотива. Наиболее надежные данные в этот период поступают от датчиков 9 пути и скорости. Точечно текущие координаты локомотива 1 могут корректироваться по координатам объектов инфраструктуры, указанных в электронной карте маршрута.
Модуль 3 обработки данных с помощью программного модуля 6 расчета координаты места нахождения хвостового вагона 12, получающего данные от датчиков 9 пути и скорости локомотива 1 и данных, получаемых по радиоканалу от хвостового вагона 12 впереди идущего поезда, рассчитывает координаты текущего места нахождения хвостового вагона 12 впереди идущего поезда, с добавлением запаса на минимальный интервал безопасного попутного следования локомотива 1. В расчете используются хранящаяся в электронной памяти устройства 2 управления движением локомотива 1 длина состава поезда, электронная карта маршрута движения поезда и измеренные текущие координаты локомотива 1, полученные от датчиков 9 пути и скорости. Эта информация с периодичностью в 1 секунду передается по радиоканалу на локомотив 1 позади идущего поезда. На локомотиве 1 позади идущего поезда принятая информация используется модулем 3 обработки данных, для расчета тормозной кривой и предотвращения столкновения с хвостовым вагоном 12 впереди идущего поезда.
На локомотиве 1 каждого поезда функционирует также программный модуль 8 контроля следования поезда в полном составе. Он осуществляет контроль следования поезда в полном составе методом проверки соответствия ускорений движения локомотива 1 и хвостового вагона 12 впереди идущего поезда. Этот метод позволяет контролировать следование поезда в полном составе независимо от надежности измерения координат места нахождения локомотива 1, определяемых только локомотивным навигационным приемником 4. При отрыве хвостовой части от состава впереди идущего поезда, эта часть начинает двигаться с замедлением по отношению к локомотиву 1. Ускорение движения локомотива 1 вычисляется в модуле 3 обработки данных устройства 2 управления локомотивом 1 на основе данных от датчиков 8 пути и скорости, а ускорение движения хвостового вагона 12 впереди идущего поезда измеряется инерциальным датчиком 15 измерения ускорений движения вагона 12, находящимся в съемном блоке 11 электроники хвостового вагона 12. Данные с цифрового выхода этого датчика 15 измерения ускорений движения вагона 12 поступают на обработку микропроцессором 14 и после фильтрации и усреднения с интервалом порядка 1-3 сек. передаются по радиоканалу в программный модуль 8 контроля следования поезда в полном составе. После обработки этих данных в программном модуле 8 контроля следования поезда в полном составе, информация передается машинисту на информационный дисплей 7 для принятия дальнейшего решения об управлении движением поезда. В частности, при разделении впереди идущего состава отменяется расчет на локомотиве 1 текущей координаты хвостового вагона 12 впереди идущего поезда, так как данные о длине состава поезда, используемые ранее для такого расчета, становятся некорректными. Информация предупреждения о прекращении следования впереди идущего поезда в полном составе передается в устройство 2 управления движением локомотива 1, следующего за этим составом.
Переданные приемопередатчиком 17 сообщения зонального центра 18 радиоблокировки по разрешению на движение, которые принимаются вторым радиомодемом 16, поступают в модуль 3 обработки данных устройства 2 управления движением. Перед использованием этих сообщений для управления движением поезда модуль 3 обработки данных совместно с блоком 23 проверки соответствия проверяет соответствие данных, содержащихся в сообщении, оперативным данным, которые поступают на локомотив 1 от приемника 20 комплексного сигнала АЛС и КРЛ по индуктивному каналу связи из каждой рельсовой цепи 21 тональной частоты, текущего места нахождения локомотива 1, и также проверяет на соответствие релевантным данным из блока 5 памяти, с записанной в нем электронной картой маршрутов движения и участков выдачи и отмены ограничений скорости.
Если данные о кодовых идентификаторах рельсовых цепей 21, текущего места нахождения головы состава поезда, о несущих частотах выходных сигналов путевых генераторов 22 комплексных сигналов АЛС и КРЛ этих рельсовых цепей 21, о кодовых номерах этих путевых генераторов 22, о кодовых признаках текущего направления движения и о кодовых номерах пути следования данного поезда, принимаемые по всем перечисленным каналам передачи информации совпадают, сообщение, принимаемое вторым радиомодемом 16 локомотива, считается защищенным от мошеннических и злонамеренных действий, которые могут выполнятся посредством компьютерных атак на аппаратуру криптографически защищенного канала радиосвязи, и может использоваться устройством 2 управления движением локомотива 1 для движения с максимальной скоростью и минимальным интервалом попутного следования за хвостовым вагоном 12 предыдущего поезда. При этом на дополнительный вход модуля 3 обработки данных поступает соответствующий сигнал, формируемый на выходе блока 23 проверки соответствия и дающий максимальный приоритет такому режиму движения.
При обнаружении вмешательства в правильную работу криптографически защищенного канала радиосвязи, блоком 23 проверки соответствия формируется специальный сигнал на его выходе управления назначением приоритетов внутренних каналов безопасного управления движением модуля 3 обработки данных для перехода устройства 2 управления движением данного поезда только по сигналам АЛС. При этом движение поезда управляется без использования приказов от зонального центра 18 радиоблокировки, а только по сигналам АЛС, принимаемым приемником 20 комплексного сигнала АЛС и КРЛ по индуктивному каналу связи из данной рельсовой цепи 21 тональной частоты текущего места нахождения локомотива 1.
Характерным примером такого управления движением является вариант управления движением на участке подхода к остановочному пункту. Здесь может произойти случай, когда данный поезд должен предельно сблизится с впередиидущим поездом, еще не отправившимся с остановочного пункта. Для предельного сближения с впередиидущим поездом, данный поезд с установленной минимальной скоростью может заехать на рельсовые цепи 21 защитного участка пути, в которых нет кодовых сигналов АЛС, а есть только кодовый сигнал КРЛ. Кодовый сигнал КРЛ продолжает приниматься приемником 20 комплексного сигнала АЛС и КРЛ и декодироваться в модуле 3 обработки данных.
И в этом, критическом для безопасности движения, случае предлагаемое устройство надежно защищают поезда от столкновения при случайном или злонамеренном вмешательстве в управление по радиоканалу. Поскольку сигналы АЛС в рельсовых цепях 21 защитного участка пути отсутствуют, модуль 3 обработки данных фиксирует ситуацию предельного сближения и инициирует экстренное торможение заднего поезда для надежного предотвращения столкновения.
Приведенные примеры показывают, что предлагаемое изобретение обеспечивает повышение безопасности и надежности, за счет осуществления приоритетного управления движением поездов путем эффективного использования возможностей взаимного резервирования подсистем в различных эксплуатационных ситуациях. При этом из-за повышения отказоустойчивости системы в целом аппаратура отдельных ее подсистем может быть выполнена с меньшим уровнем аппаратной и информационной избыточности. Например, аппаратура приемопередатчика 17 зонального центра 18 радиоблокировки может быть выполнена одноканальной и использовать общепромышленные радиоканалы связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Система децентрализованного интервального регулирования движения поездов | 2019 |
|
RU2725332C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2761485C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2743103C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2776133C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2746629C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
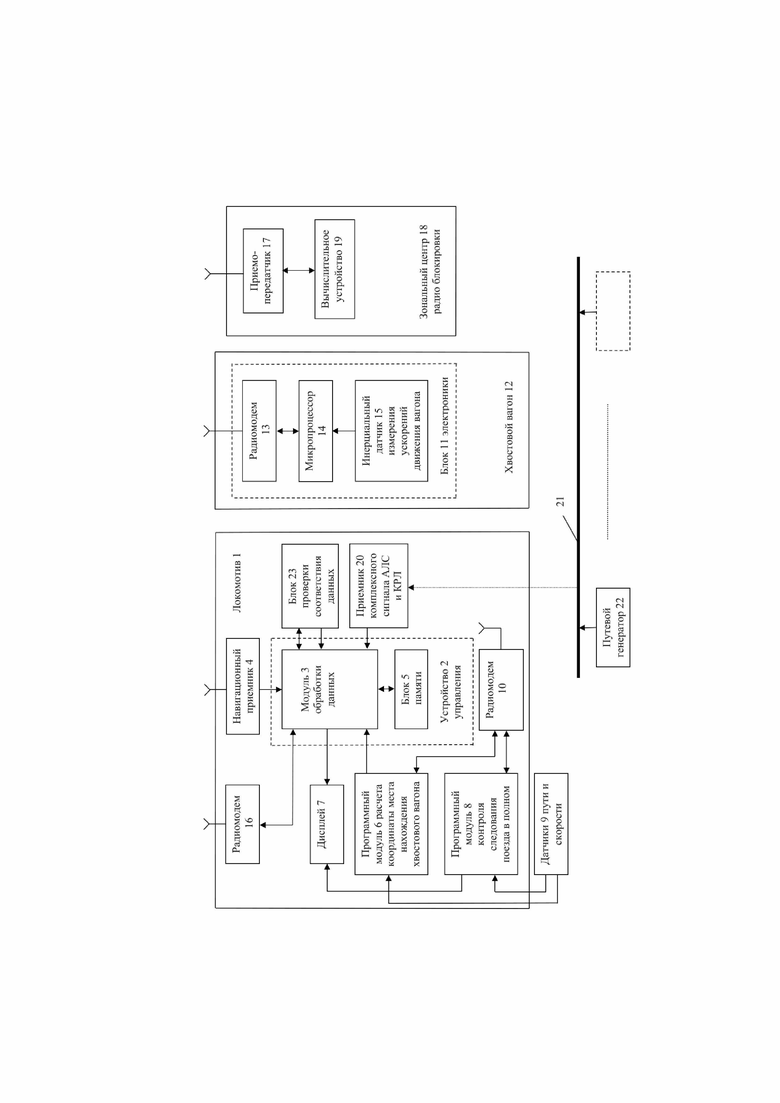
Изобретение относится к средствам интервального регулирования движения поездов. Система включает бортовую - локомотивную часть, бортовую - хвостовую часть и наземную часть. Каждый задействованный локомотив (1) на борту имеет устройство (2) управления движением, навигационный приемник (4), программный модуль (6) расчета координаты места нахождения хвостового вагона, дисплей (7), программный модуль (8) контроля следования поезда в полном составе, радиомодемы (10) и (16), приемник (20) комплексного сигнала АЛС и КРЛ, блок (23) проверки соответствия данных. Причем устройство (2) управления движением снабжено модулем (3) обработки данных с подключенным к нему блоком (5) памяти. На каждом задействованном хвостовом вагоне (12) поезда установлен блок (11) электроники, включающий радиомодем (13), микропроцессор (14), инерциальный датчик (15) измерения ускорений движения вагона. Наземная часть включает датчики (9) пути и скорости, задействованные рельсовые линии (21), путевые генераторы (22) комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты, зональный центр (18) радиоблокировки с вычислительным устройством (19) и приемопередатчиком (17). Достигается повышение безопасности движения. 1 ил.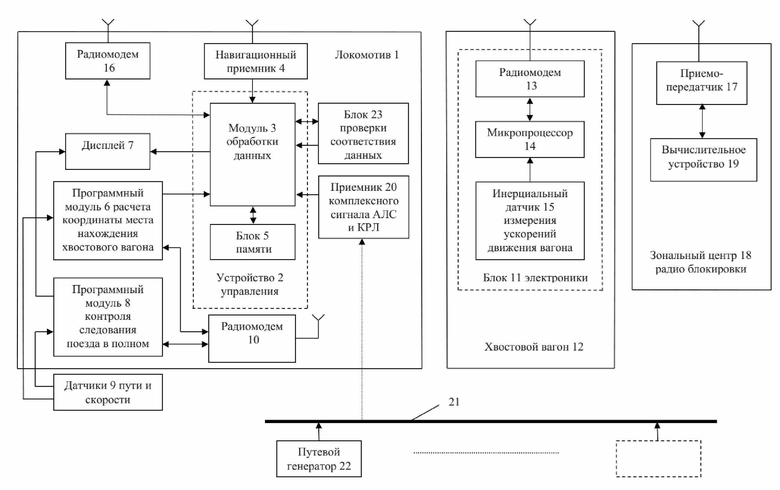
Система интервального регулирования движения поездов, содержащая на каждом локомотиве в устройстве управления движением модуль обработки данных с подключенными к нему навигационным приемником, блоком памяти, с записанной в нем электронной картой маршрутов движения и участков выдачи и отмены ограничений скорости, программным модулем расчета координаты места нахождения хвостового вагона и дисплеем, к дополнительному входу которого подключен выход программного модуля контроля следования поезда в полном составе, при этом входы программного модуля расчета координаты места нахождения хвостового вагона и программного модуля контроля следования поезда в полном составе соединены с выходами датчиков пути и скорости, а их входы/выходы подключены к соответствующим выходам/входам радиомодема, который по радиоканалу соединен с установленным в блоке электроники хвостового вагона радиомодемом, соединенным с микропроцессором, к которому подключен инерциальный датчик измерения ускорений движения вагона, отличающаяся тем, что на каждом локомотиве установлен второй радиомодем, который по криптографически защищенным каналам радиосвязи соединен с приемопередатчиком зонального центра радиоблокировки, подключенным к вычислительному устройству, при этом вход/выход второго радиомодема соединен с выходом/входом модуля обработки данных, вход которого подключен к выходу приемника комплексного сигнала АЛС и КРЛ, вход которого посредством индуктивного канала связи и рельсовой линии соединен с выходами путевых генераторов комплексных сигналов АЛС и КРЛ рельсовых цепей тональной частоты, второй выход/вход модуля обработки данных соединен с входом/выходом блока проверки соответствия данных, поступающих на модуль обработки данных, дополнительный вход которого подключен к выходу блока проверки соответствия данных.
| Система интервального регулирования движения поездов | 2020 |
|
RU2743103C1 |
| Система децентрализованного интервального регулирования движения поездов | 2019 |
|
RU2725332C1 |
| ПОВОРОТНЫЙ РАЗМЕТОЧНЫЙ СТОЛ | 1932 |
|
SU36029A1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| CN 103144654 A, 12.06.2013. | |||

