Изобретение относится к области железнодорожной автоматики и может быть использовано для децентрализованного интервального регулирования движения поездов на линиях с малой и средней интенсивностью движения.
Известна комплексная система интервального регулирования движения поездов, содержащая микропроцессорную систему централизации стрелок и сигналов, связанную с системой объектных контроллеров и со стационарными техническими средствами цифрового радиоканала для передачи данных к бортовой ЭВМ локомотивов, снабженная расположенными вдоль перегонов реперными датчиками, выполненными в виде балис, стационарно расположенными радио блок-центром и системой диспетчерской централизации с отображением местоположения поездов в реальном времени, при этом микропроцессорная система централизации стрелок и сигналов, радио блок-центр и система диспетчерской централизации связаны между собой по принципу обратной связи, а бортовая ЭВМ локомотива выполнена в виде бортовой системы безопасности, включающей систему точечной передачи данных на основе балис и систему контроля целостности поезда, и связана с радио блок- центром. Радио блок-центр снабжен терминалом контроля технического состояния устройств. Бортовая система безопасности снабжена комплексным локомотивным устройством безопасности, включающим автоматическую локомотивную сигнализацию непрерывного действия и электронный локомотивный скоростемер. Система диспетчерской централизации снабжена автоматизированным рабочим местом электромеханика сигнализации, централизации, блокировки (RU 138441, B61L 23/18, 20.03.2014).
Недостатком известной системы является техническая сложность, обусловленная наличием напольных устройств и централизованным характером управления, а также недостаточная надежность в работе навигационных устройств в условиях плохой видимости спутников навигационной системы.
В качестве прототипа принята система децентрализованного интервального регулирования движения поездов, содержащая на локомотиве локомотивный навигационный приемник с антенной, принимающий сигнал от спутниковой группировки, устройство обработки, выход навигационного приемника соединен с первым входом устройства обработки, приемник линии связи, приемная антенна, хвостовое навигационное устройство с антеннами, причем сигнал со спутниковой группировки через антенну поступает в хвостовое навигационное устройство, расположенное на хвостовом вагоне впереди идущего поезда, с которого обработанная необходимым образом информация через антенну и по линии связи поступает на вход приемной антенны, выход которой подключен ко второму входу устройства обработки, в котором вычисляются координаты локомотива и хвостового вагона впереди идущего поезда с последующим определением расстояния между ними и на выходе которого формируется управляющая информация (RU 2664023, B61L 23/34, 14.08.2018).
Недостатком данной системы является недостаточно точное определение следования поезда в полном составе и координат места нахождения последнего вагона поезда, при сбоях в работе спутниковых навигационных средств, в местах ограниченной видимости спутников навигационной системы. Это создает опасные ситуации при децентрализованном интервальном регулировании движения поездов.
Технический результат заключается в повышении надежности работы в местах ограниченной видимости спутников навигационной системы и повышении безопасности движения.
Технический результат достигается тем, что в системе децентрализованного интервального регулирования движения поездов, содержащей на каждом локомотиве в устройстве управления движением модуль обработки данных, к первому входу которого подключен навигационный приемник, а выход соединен с дисплеем, и радиомодем, соединенный по радиоканалу с установленным в хвостовом вагоне радиомодемом, соединенным с микропроцессором, согласно изобретению на локомотиве установлены программный модуль расчета координаты места нахождения хвостового вагона, программный модуль контроля следования поезда в полном составе, блок памяти с записанной в ней электронной картой и датчики пути и скорости, при этом датчики пути и скорости своими выходами соединены с входами программного модуля расчета координаты места нахождения хвостового вагона и программного модуля контроля следования поезда в полном составе, входы/выходы которых подключены к соответствующим выходам/входам радиомодема, выход программного модуля расчета координаты места нахождения хвостового вагона соединен с вторым входом модуля обработки данных, а выход программного модуля контроля следования поезда в полном составе соединен с дополнительным входом дисплея, а на хвостовом вагоне установлен инерциальный датчик измерения ускорений движения вагона, который подключен к микропроцессору.
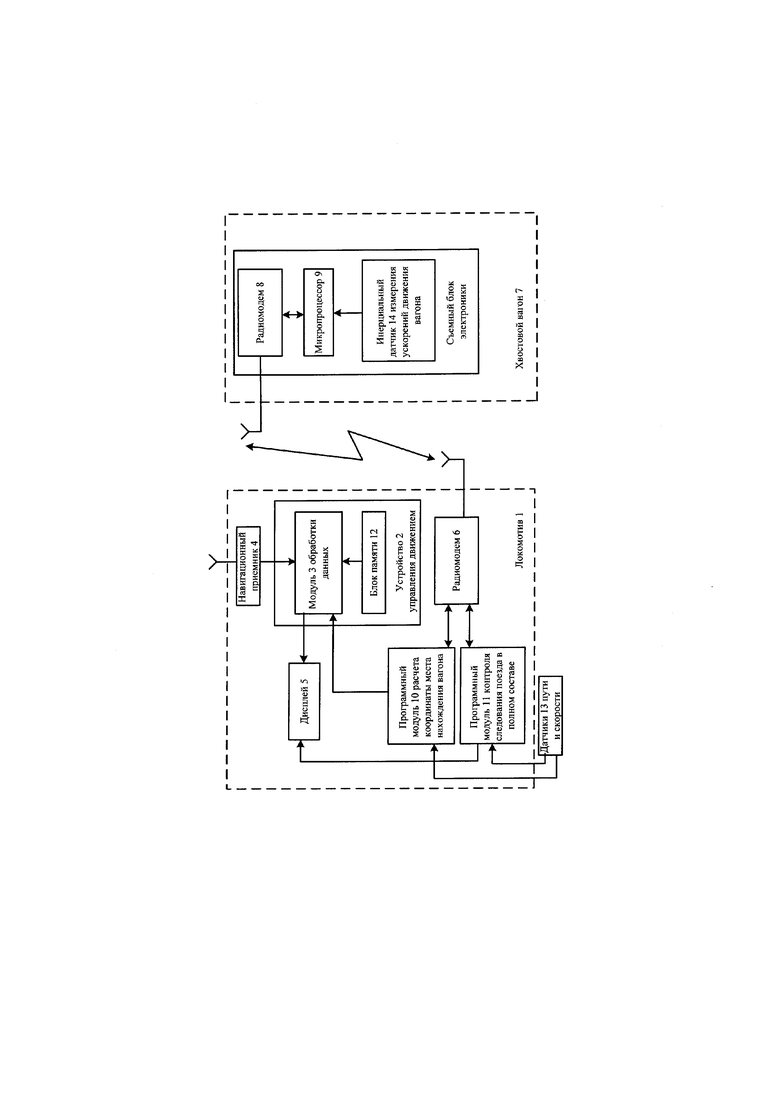
На чертеже приведена структурная схема системы децентрализованного интервального регулирования движения поездов.
Система децентрализованного интервального регулирования движения поездов содержит на каждом локомотиве 1 в устройстве 2 управления движением модуль 3 обработки данных, к первому входу которого подключен навигационный приемник 4, а выход соединен с дисплеем 5, радиомодем 6, соединенный по радиоканалу с установленным в хвостовом вагоне 7 радиомодемом 8, соединенным с микропроцессором 9, на локомотиве 1 установлены программный модуль 10 расчета координаты места нахождения хвостового вагона, программный модуль 11 контроля следования поезда в полном составе, блок памяти 12 с записанной в ней электронной картой и датчики 13 пути и скорости, при этом датчики 13 пути и скорости своими выходами соединены с входами программного модуля 10 расчета координаты места нахождения хвостового вагона и программного модуля 11 контроля следования поезда в полном составе, входы/выходы которых подключены к соответствующим выходам/входам радиомодема 6, выход программного модуля 10 расчета координаты места нахождения хвостового вагона соединен с вторым входом модуля 3 обработки данных, а выход программного модуля 11 контроля следования поезда в полном составе соединен с дополнительным входом дисплея 5, а на хвостовом вагоне 7 установлен инерциальный датчик 14 измерения ускорений движения вагона, который подключен к микропроцессору 9.
Система децентрализованного интервального регулирования движения поездов работает следующим образом.
Данная система предназначена в основном для линий с малой и средней интенсивностью движения поездов. Именно такие линии чаще всего проходят через районы с плохой видимостью навигационных спутников и предлагаемая система решает проблему обеспечения безопасного интервального регулирования движения поездов в условиях сбоев в работе спутниковых навигационных приемников.
Модуль 3 обработки данных в устройстве управления движением поезда на локомотиве 1 выбирает параметры движения из условий предотвращения возможности столкновения с хвостовым вагоном 7 впереди идущего поезда. Для этого используются данные из блока 12 памяти, содержащего электронную карту маршрута своего движения, и информацию о координатах хвостового вагона 7 впереди идущего поезда, получаемую по радиоканалу.
Для обеспечения устройства управления на локомотиве 1 более надежной и безопасной информацией о расчетной координате места нахождения хвостового вагона 7 впереди идущего поезда расчетная координата вычисляется с коэффициентом запаса, который выбирается так, чтобы погрешности расчетов и измерений приводили только к завышению реального расстояния от локомотива 1 поезда до хвостового вагона 7 впереди идущего поезда. При увеличении минимального интервала попутного следования поездов снижается пропускная способность только для железнодорожных линий с высокой интенсивностью движения поездов.
Если локомотивный навигационный приемник 4, принимающий сигнал от спутниковой группировки, не видит достаточного количества спутников, то он прекращает нормальную работу и устройство управления движением локомотива 1 использует другие данные о перемещении поезда для того, чтобы сохранить правильность измерения текущей координаты локомотива. Наиболее надежные данные в этот период поступают от датчиков 13 пути и скорости. Точечно текущие координаты локомотива 1 могут корректироваться по координатам объектов инфраструктуры, указанных в электронной карте маршрута.
Модуль 3 обработки данных с помощью программного модуля 10 расчета координаты текущего места нахождения, получающего данные с датчиков 13 пути и скорости локомотива 1 и данных, получаемых по радиоканалу с хвостового вагона 7 впереди идущего поезда, рассчитывает координаты текущего места нахождения хвостового вагона 7 впереди идущего поезда с добавлением запаса на минимальный интервал безопасного попутного следования локомотива. В расчете используются хранящаяся в электронной памяти устройства управления движением локомотива 1 длина состава поезда, электронная карта маршрута движения поезда и измеренные текущие координаты локомотива 1, полученные от датчиков 13 пути и скорости. Эта информация с периодичностью в 1 секунду рассылается по радиоканалу на локомотив позади идущего поезда. На локомотиве позади идущего поезда принятая информация используется для расчета тормозной кривой и предотвращения столкновения с хвостовым вагоном впереди идущего поезда.
На локомотиве 1 каждого поезда функционирует также программный модуль 11 контроля следования поезда в полном составе. Он осуществляет контроль следования поезда в полном составе методом проверки соответствия ускорений движения локомотива 1 и хвостовой части впереди идущего поезда. Этот метод позволяет контролировать следование поезда в полном составе независимо от надежности измерения координат места нахождения локомотива 1, определяемых только локомотивным навигационным приемником 4. При отрыве хвостовой части от состава впереди идущего поезда эта часть начинает двигаться с замедлением по отношению к локомотиву 1. Ускорение движения локомотива вычисляется в модуле 3 обработки данных устройства управления локомотивом 1 на основе данных от датчиков 13 пути и скорости, а ускорение движения хвостового вагона 7 впереди идущего поезда измеряется инерциальным датчиком 14 измерения ускорений движения вагона, находящимся в съемном блоке электроники хвостового вагона 7. Данные с цифрового выхода этого датчика 14 измерения ускорений движения вагона поступают на обработку микропроцессором 9 и после фильтрации и усреднения с интервалом порядка 1-3 сек. передаются по радиоканалу в программный модуль 11 контроля следования поезда в полном составе. После обработки этих данных в программном модуле 11 контроля следования поезда в полном составе информация передается на информационный дисплей 5 машинисту для принятия дальнейшего решения об управлении движением поезда. В частности, при разделении впереди идущего состава отменяется расчет на локомотиве 1 текущей координаты хвостового вагона 7 впереди идущего поезда, так как данные о длине состава поезда, используемые ранее для такого расчета, становятся некорректными. Информация предупреждения о прекращении следования впереди идущего поезда в полном составе передается в устройство управления движением локомотива, следующего за этим составом.
Таким образом, предлагаемое изобретение обеспечивает повышение надежности и безопасности движения поездов в местах ограниченной видимости спутников навигационной системы и повышении безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2743103C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2761485C1 |
| Способ децентрализованного интервального регулирования движения поездов и система для его реализации | 2019 |
|
RU2722780C1 |
| Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением | 2019 |
|
RU2724476C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2776133C1 |
Изобретение относится к средствам децентрализованного интервального регулирования движения поездов. На каждом локомотиве в устройстве управления движением система содержит модуль обработки данных, к первому входу которого подключен навигационный приемник, а выход соединен с дисплеем, и радиомодем, соединенный по радиоканалу с установленным в хвостовом вагоне радиомодемом, соединенным с микропроцессором. При этом на локомотиве установлены программный модуль расчета координаты места нахождения хвостового вагона впереди идущего поезда, программный модуль контроля следования впереди идущего поезда в полном составе, блок памяти с записанной в ней электронной картой и датчики пути и скорости, при этом датчики пути и скорости своими выходами соединены с входами программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда и программного модуля контроля следования впереди идущего поезда в полном составе, входы/выходы которых подключены к соответствующим выходам/входам радиомодема, выход программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда соединен с вторым входом модуля обработки данных, а выход программного модуля контроля следования впереди идущего поезда в полном составе соединен с дополнительным входом дисплея, а на хвостовом вагоне установлен инерциальный датчик измерения ускорений движения вагона, который подключен к микропроцессору. Достигается повышение надежности работы в местах ограниченной видимости спутников навигационной системы. 1 ил.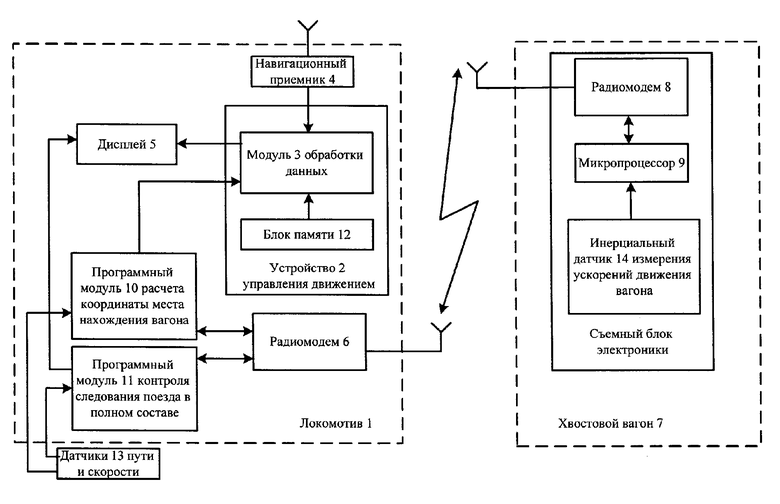
Система децентрализованного интервального регулирования движения поездов, содержащая на каждом локомотиве в устройстве управления движением модуль обработки данных, к первому входу которого подключен навигационный приемник, а выход соединен с дисплеем, и радиомодем, соединенный по радиоканалу с установленным в хвостовом вагоне радиомодемом, соединенным с микропроцессором, отличающаяся тем, что на локомотиве установлены программный модуль расчета координаты места нахождения хвостового вагона впереди идущего поезда, программный модуль контроля следования впереди идущего поезда в полном составе, блок памяти с записанной в ней электронной картой и датчики пути и скорости, при этом датчики пути и скорости своими выходами соединены с входами программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда и программного модуля контроля следования впереди идущего поезда в полном составе, входы/выходы которых подключены к соответствующим выходам/входам радиомодема, выход программного модуля расчета координаты места нахождения хвостового вагона впереди идущего поезда соединен со вторым входом модуля обработки данных, а выход программного модуля контроля следования впереди идущего поезда в полном составе соединен с дополнительным входом дисплея, а на хвостовом вагоне установлен инерциальный датчик измерения ускорений движения вагона, который подключен к микропроцессору.
| Способ и система децентрализованного интервального регулирования движения поездов | 2017 |
|
RU2664023C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СЛЕДУЮЩИМИ ДРУГ ЗА ДРУГОМ ПОЕЗДАМИ НА ОСНОВЕ ЦИФРОВОЙ РАДИОСВЯЗИ | 2015 |
|
RU2578646C1 |
| CN 103144654 A, 12.06.2013 | |||
| CN 104260758 A, 07.01.2015. | |||

