Изобретение касается устройства для регулирования пневмоприводного токоприемника для транспортного средства, при этом предусмотрен участок регулирования, который имеет первый регулятор давления, второй регулятор давления, а также активирующее устройство.
Чтобы снизить или, соответственно, предотвратить износ или, соответственно, повреждения башмаков токоприемников, требуется точное регулирование контактных усилий между этими башмаками и контактным проводом или токоведущей шиной и пр. Высокие контактные усилия приводят к износу вследствие сильного трения между башмаком и контактным проводом или токоведущей шиной, слишком низкие контактные усилия приводят к электрическим дугам между башмаком и контактным проводом или токоведущей шиной, что, в свою очередь, вызывает износ. Нормы (например, Европейская норма 50367) устанавливают допустимые пределы контактных усилий в зависимости от скорости движения.
Контактные усилия токоприемников часто настраиваются с использованием аэродинамических сил, которые подвергаются влиянию посредством обтекателей ветра.
Известны также токоприемники, имеющие пневматическое регулирование давления.
Так, например, EP 1 862 347 B1 описывает устройство управления и способ управления для токоприемника, приводимого в действие посредством воздушного сильфона, причем это устройство управления имеет регулятор давления. На основе измеренных посредством сенсора сигналов давления и сигналов скорости настраивается номинальное значение давления. Предварительная настройка этого номинального значения давления осуществляется механически, динамические адаптации предварительных настроек производятся пневматически.
Из уровня техники известна также EP 1 975 584 B1, в которой раскрыты устройство и способ для измерения контактного усилия между токоприемником и контактным проводом. Предусмотрены выполненный в виде тензосенсора сенсор контактного усилия, а также ячейка для измерения усилия, благодаря чему могут синхронно измеряться и оцениваться как статические, так и динамические контактные усилия.
При этом ячейка для измерения усилия выполнена таким образом, что вследствие характерного поведения срабатывания сенсора из оценки контактного усилия могут исключаться влияния температуры на контактные усилия, т.е. изменения температуры не влияют на результаты оценки контактного усилия.
Названные методы в своих известных вариантах имеют тот недостаток, что регулирование токоприемника, как на основе контактного усилия, так и на основе давления, не предусмотрено.
Поэтому в основе изобретения лежит задача, предложить усовершенствованное по сравнению с уровнем техники и особенно точное, а также редундантное и поэтому надежное устройство или, соответственно, усовершенствованный способ для регулирования токоприемника.
В соответствии с изобретением эта задача решается с помощью устройства для регулирования пневмоприводного токоприемника вышеназванного вида, у которого на токоприемнике может располагаться по меньшей мере один сенсор, который проводящим сигнал соединением соединен с регулятором контактного усилия участка регулирования, у которого первый регулятор давления проводящим сигнал соединением связан с регулятором контактного усилия, вторым регулятором давления, а также подачей давления, при этом второй регулятор давления имеет разъем для действительного пилотного давления из первого регулятора давления, и у которого между вторым регулятором давления и подачей давления, а также между вторым регулятором давления и активирующим устройством предусмотрены проводящие сигнал соединения.
Благодаря сенсору и соединенному с ним регулятору контактного усилия настройка контактного усилия или, соответственно, адаптация контактного усилия может осуществляться даже тогда, когда неизмеримые эксплуатационные условия (например, аэродинамические влияния) вызывают изменение контактного усилия, которое приводит к необходимости корректировки, чтобы обеспечивать надежную и с низким износом эксплуатацию токоприемника. Наряду с регулятором контактного усилия и первым регулятором давления предусмотрен второй регулятор давления, благодаря чему достигается известная редундантность и вместе с тем повышенная эксплуатационная надежность. Особая эффективность этой редундантности достигается тогда, когда регулятор контактного усилия, первый регулятор давления и второй регулятор давления питаются посредством устройств энергоснабжения различных физических принципов. В случае дефектов, неисправностей, отказов и пр. регулятора контактного усилия и/или первого регулятора давления второй регулятор давления предоставляет минимальное давление и вместе с тем минимальное контактное усилие между токоприемником и контактным проводом или токоведущей шиной, чем продолжает обеспечиваться надежный съем тока.
Далее, разъем для действительного пилотного давления на втором регуляторе давления способствует тому, что настраиваемое посредством второго регулятора давления минимальное давление (т.е. минимально допустимое давление) может временно повышаться, чтобы можно было быстро реагировать на динамические колебания контактного усилия (например, вследствие аэродинамических влияний, неравномерностей прохождения контактного провода и пр.), т.е. можно было быстро предоставлять достаточное контактное усилие между токоприемником и контактным проводом или, соответственно, токоведущей шиной.
Благодаря регулятору контактного усилия в порядке получения допуска рельсового транспортного средства могут сокращаться или, соответственно, отменяться определенные измерительные поездки с целью адаптации обтекателей ветра токоприемника, влияющих на контактное усилие между токоприемником и контактным проводом, так как точное регулирование контактного усилия осуществляется с помощью регулятора контактного усилия, и необходим только грубый выбор размеров обтекателей ветра токоприемника.
Далее, регулирование контактного усилия приводит к пониженному износу токоприемника и контактного провода, благодаря чему могут увеличиваться интервалы технического и профилактического обслуживания.
Удобно, когда указанный по меньшей мере один сенсор выполнен в виде тензосенсора, расположенного на башмаке токоприемника.
С помощью этой меры достигается простое и надежное определение контактных усилий. Если тензосенсор выполнен в виде оптического сенсора (например, как сенсор в виде волоконной решетки Брэгга), то достигается особенно высокая чувствительность измерения, которая позволяет измерять очень низкие удлинения. Кроме того, оптические сенсоры могут быть также расположены в зонах высокого напряжения, т.е., например, непосредственно на токоприемнике.
Одно из предпочтительных решений получают, когда контактные усилия сохранены в памяти данных регулятора контактного усилия.
Благодаря этой мере становится возможной непосредственная или отложенная по времени оценка контактных усилий или, соответственно, кривых изменения контактных усилий. Благодаря этому могут обнаруживаться повреждения контактного провода или токоприемника.
Одно из удобных решений получается, когда в регулятор контактного усилия имплементированы линии характеристик. Эти линии характеристик устанавливают для регулятора контактного усилия, например, давления или номинальные контактные усилия в зависимости от скорости движения рельсового транспортного средства.
Благодаря этой мере становятся возможными особенно точное регулирование контактного усилия, а также контроль измеренных контактных усилий.
Далее, благодаря этому даже в случае дефекта, неисправности и пр. сенсора или измерительной цепи регулирование контактного усилия остается функциональным по меньшей мере в виде ограниченного, т.е. базирующегося чисто на линии характеристики регулирования.
Ниже изобретение поясняется подробнее на примерах осуществления.
В качестве примеров показано:
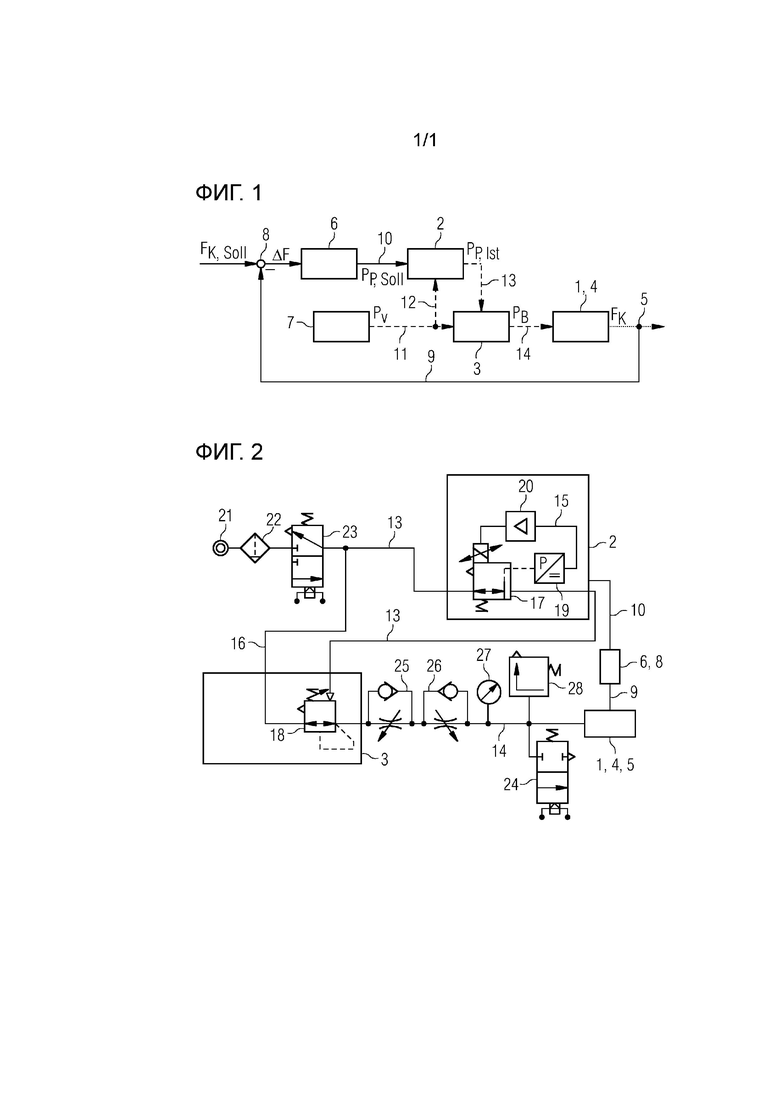
фиг.1: блок-схема одного из примерных вариантов осуществления предлагаемого изобретением устройства для регулирования токоприемника, и
фиг.2: схема одного из примерных вариантов осуществления предлагаемого изобретением устройства для регулирования токоприемника.
На фиг.1 показана блок-схема одного из примерных вариантов осуществления предлагаемого изобретением устройства для регулирования поднимаемого и опускаемого посредством активирующего устройства 4 токоприемника 1 не показанного рельсового транспортного средства, который выполнен в виде однополозного токоприемника или, соответственно, пантографа. Вдоль участка регулирования каскадного регулирования предусмотрены электропневматический первый регулятор 2 давления, механико-пневматический второй регулятор 3 давления, а также электронный регулятор 6 контактного усилия.
Токоприемник 1 и устройство для его регулирования частично расположены на кузове вагона рельсового транспортного средства, частично внутри него.
Для измерения контактного усилия FK между токоприемником 1 и не показанным контактным проводом предусмотрен сенсор 5, выполненный как известный сенсор в виде волоконной решетки Брэгга (тензосенсор). Он расположен на не изображенном тензоэлементе. Этот тензоэлемент расположен между не показанной удерживающей рамой, которая соединена с верхней стороной токоприемника 1, и башмаком, который, тоже не изображенный, контактирует с контактным проводом. Возникающее между токоприемником 1 и контактным проводом контактное усилие FK приводит к пропорциональному ему удлинению тензоэлемента и вместе с тем к пропорциональному контактному усилию FK удлинению сенсора 5.
Это удлинение посредством известной физико-математической зависимости (закон Гука) между удлинением, модулем упругости, напряжением, площадью и контактным усилием FK пересчитывается в контактное усилие FK и в виде сигнала контактного усилия по электрической первой линии 9 и через сравнительное звено 8 передается в регулятор 6 контактного усилия.
В соответствии с изобретением возможно также непосредственно, т.е. в виде оптического сигнала, передавать создаваемый сенсором 5 сигнал в регулятор 6 контактного усилия, при этом первая линия 9 выполнена в виде оптической линии.
Посредством сравнительного звена 8 из обратной связи контактного усилия FK и номинального контактного усилия FK,номин., которое выполняет функцию задающей величины, получается разностное контактное усилие ΔF, которое выполняет функцию разности регулирования.
В регуляторе 6 контактного усилия из разностного контактного усилия ΔF получается номинальное пилотное давление pp,номин. как уставка для временного повышения давления или, соответственно, контактного усилия на основе настраиваемого с помощью второго регулятора 3 давления, выполняющего функцию минимального давления базового давления pA.
В не показанном вычислительном блоке регулятора 6 контактного усилия разностное контактное усилие ΔF посредством известных, имплементированных в вычислительный блок зависимостей между разностным контактным усилием ΔF, характерной первой площадью активирующего устройства 4, другими параметрами активирующего устройства 4, характерной второй площадью между башмаком и контактным проводом, коэффициентами полезного действия (например, коэффициент полезного действия не показанной системы тяг токоприемника), а также номинальным пилотным давлением pp,номин. пересчитывается в номинальное пилотное давление pp,номин. и по электрической второй линии 10 передается в первый регулятор 2 давления.
В соответствии с изобретением возможно также, чтобы предназначенный для регулирования 6 контактного усилия вычислительный блок был расположен в отдельном от регулятора 6 контактного усилия месте и соединен с регулятором 6 контактного усилия соответствующими проводящими путями.
В регулятор 6 контактного усилия имплементирован алгоритм регулирования, посредством которого первый регулятор 2 давления включается таким образом, что абсолютные значения разностного контактного усилия ΔF минимизируются.
Первый регулятор 2 давления выполнен в виде электропневматического регулятора. Посредством этого первого регулятора 2 давления номинальное пилотное давление pp,номин., которое передается в виде электрического сигнала в первый регулятор 2 давления, преобразуется в пневматический сигнал.
Первый регулятор 2 давления через показанный на фиг.2 разъем 21 питающего давления, а также пневматическую третью линию 11 и пневматическую четвертую линию 12 соединен с подачей 7 давления, которая имеет не изображенный компрессор, и в которой действует питающее давление pV.
Посредством электрического сигнала номинального пилотного давления pp,номин. как величины уставки из питающего давления pv получается действительное пилотное давление pp,действ., которое по пневматической пятой линии 13 передается во второй регулятор 3 давления.
Второй регулятор 3 давления выполнен в виде механико-пневматического регулятора. Он соединен через разъем 21 питающего давления и третью линию 11 с подачей 7 давления и имеет маховик. С помощью этого маховика из питающего давления pV настраивается базовое давление pA. Получается давление pB активирования токоприемника, при этом базовое давление pA повышается на действительное пилотное давление pp,действ., в результате чего получается давление pB активирования токоприемника как суммарное давление или пропорциональное давление.
Это давление pB активирования токоприемника по пневматической шестой линии 14 передается в активирующее устройство 4 токоприемника 1, которое выполнено в виде известного пневматического рессорного устройства, имеющего не показанный воздушный сильфон. Изменения давления в воздушном сильфоне приводят к тому, что токоприемник 1 поднимается или опускается, и при этом контактное усилие FK между токоприемником 1 и контактным проводом увеличивается или уменьшается.
Измеренные сенсором 5 контактные усилия FK сохраняются в памяти вычислительного блока регулятора 6 контактного усилия и через беспроводной интерфейс вычислительного блока, имеющий антенну, передаются в пункт технического обслуживания для оценки.
Вычислительный блок имеет устройство для регистрации времени и соединен с не показанным приемником системы глобального позиционирования (GPS) рельсового транспортного средства. Поэтому контактные усилия FK сохраняются в памяти вместе с отметками времени и места, которые присвоены этим контактным усилиям FK. Благодаря этому на основании сохраненных в памяти контактных усилий FK или, соответственно, полученных из них кривых контактного усилия возможно обнаружение времени и места повреждений токоприемника 1 и/или контактного провода. В соответствии с изобретением возможно также, чтобы оценка осуществлялась непосредственно в вычислительном блоке.
Если, например, контактное усилие FK не достигает некоторого заданного порогового значения, то в вычислительном блоке создается событие-предупреждение, по не изображенному сигнальному проводу в виде предупредительного сигнала передается на пульт машиниста рельсового транспортного средства и там отображается на дисплее в виде предупредительного указания.
При дефекте или, соответственно, отказе сенсора 5 или в случае прочих неисправностей осуществляется получение номинального пилотного давления pp,номин. посредством линий характеристик номинального давления, которые в виде математической зависимости между номинальными пилотными давлениями pp,номин. и скоростями движения имплементированы в вычислительный блок регулятора 6 контактного усилия.
Вычислительный блок включает в себя независимое от других компонентов регулятора 6 контактного усилия устройство электроснабжения, поэтому при дефекте, отказе или повреждении и пр. регулятора 6 контактного усилия остается активным и посредством линий характеристик номинального давления передает номинальные пилотные давления pp,номин. в первый регулятор 2 давления. Эти линии характеристик номинального давления устанавливают номинальные пилотные давления pp,номин. в зависимости от скоростей движения. Вычислительный блок соединен с не изображенным устройством измерения скорости рельсового транспортного средства. Посредством измеренной скорости движения и названной математической зависимости между номинальными пилотными давлениями pp,номин. и скоростями движения находится подходящее к измеренной скорости номинальное пилотное давление pp,номин. и по второй линии 10 передается в первый регулятор 2 давления.
Токоприемник 1 в этом примере осуществления выполнен в виде пантографа. Однако в соответствии с изобретением возможно, чтобы токоприемник 1 был выполнен, например, в виде параллелограммного токоприемника, в виде бокового токоприемника для токоведущей шины или в виде другого устройства транспортного средства, которое подводится к контактному проводу. Токоприемник 1 может быть расположен на рельсовых транспортных средствах, а также на других транспортных средствах, таких как, например, электробусы или грузовые электромобили.
На фиг.2 изображена пневматическая схема того примерного варианта осуществления предлагаемого изобретением устройства для регулирования токоприемника 1, который показан также на фиг.1. Поэтому частично применяются одинаковые ссылочные обозначения.
Устройство для регулирования токоприемника 1, а также сам токоприемник 1 расположены на не изображенном рельсовом транспортном средстве.
Токоприемник 1 имеет пневматическое активирующее устройство 4, а также выполненный в виде тензосенсора сенсор 5, которые описаны в связи с фиг.1.
Сигналы измерений применительно к контактному усилию FK по электрической первой линии 9 передаются в электронный регулятор 6 контактного усилия, имеющий сравнительное звено 8, и посредством регулятора 6 контактного усилия преобразуются в номинальное пилотное давление pp,номин.
Это номинальное пилотное давление pp,номин. по электрической второй линии 10 передается в известный первый регулятор 2 давления.
Первый регулятор 2 давления выполнен в виде электропневматического регулятора и имеет приводимый в действие посредством переставляемой магнитной катушки первый клапан 17 регулирования давления, имеющий пружинный возврат и выпуск воздуха, сенсор 19 давления, а также исполнительный элемент 20, которые соединены друг с другом седьмой линией 15.
Первый регулятор 2 давления через разъем 21 питающего давления соединен с изображенной на фиг.1 подачей 7 давления.
Посредством сенсора 19 давления и исполнительного элемента 20 активируется первый клапан 17 регулирования давления, и при этом на основе предоставленного по первой ветви пневматической пятой линии 13 от известного второго регулятора 3 давления из питающего давления pV базового давления pA, а также номинального пилотного давления pp,номин. получается действительное пилотное давление pp,действ. Это действительное пилотное давление pp,действ. по второй ветви пятой линии 13 передается на разъем второго клапана 18 регулирования давления второго регулятора 3 давления.
Второй регулятор 3 давления имеет маховик, который изображен на фиг.2 в виде символа пружины второго клапана 18 регулирования давления, и через разъем 21 питающего давления соединен с подачей 7 давления. Посредством маховика, например, машинистом тягового транспортного средства на пульте машиниста рельсового транспортного средства, из питающего давления pV настраивается базовое давление pA.
Питающее давление pV через фильтр 22 и первый ходовой клапан 23, который выполнен в виде предварительно регулируемого, трехходового двухпозиционного капана, запитывается в первую ветвь пятой линии 13 или, соответственно, в восьмую линию 16.
Восьмая линия 16 и первая ветвь пятой линии 13 соответствуют третьей линии 11 и четвертой линии 12, которые показаны на фиг.1.
Первый ходовой клапан 22 имеет пружинный возврат, а также выпуск воздуха, через который из первой ветви пятой линии 13 или, соответственно, восьмой линии 16 может выпускаться воздух.
По восьмой линии 16 базовое давление pA передается в настраиваемый второй клапан 18 регулирования давления, который имеет выпуск воздуха. Из базового давления pA и переданного по второй ветви пятой линии 13 и запитанного через разъем во второй клапан 18 регулирования давления действительного пилотного давления pp,действ. во втором клапане 18 регулирования давления получается давление pB активирования токоприемника. Это давление pB активирования токоприемника по шестой линии 14 и через настраиваемый первый дроссельный обратный клапан 25, а также настраиваемый второй дроссельный обратный клапан 26, имеющий свободные протоки в каждом направлении, передается в воздушный сильфон активирующего устройства 4 токоприемника 1 и превращается активирующим устройством 4 в процесс подъема или опускания токоприемника 1.
Посредством первого дроссельного обратного клапана 25, а также второго дроссельного обратного клапана 26 могут настраиваться продолжительности подъема и опускания токоприемника 1.
Шестая линия 14 имеет также известный манометр 27, известный предохранительный клапан 28, а также второй ходовой клапан 24.
Посредством предохранительного клапана 28, который рассчитан на пороговое значение давления 6 бар и имеет пружинный возврат, а также выпуск воздуха, предотвращаются избыточные давления больше 6 бар в шестой линии 14 и вместе с тем повреждения (например, воздушного сильфона активирующего устройства 4).
Посредством второго ходового клана 24, который выполнен в виде предварительно управляемого, двухходового двухпозиционного клапана, имеющего пружинный возврат и выпуск воздуха, при соответствующем включении осуществляется быстрое опускание токоприемника 1.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Токоприемник
2 Первый регулятор давления
3 Второй регулятор давления
4 Активирующее устройство
5 Сенсор
6 Регулятор контактного усилия
7 Подача давления
8 Сравнительное звено
9 Первая линия
10 Вторая линия
11 Третья линия
12 Четвертая линия
13 Пятая линия
14 Шестая линия
15 Седьмая линия
16 Восьмая линия
17 Первый клапан регулирования давления
18 Второй клапан регулирования давления
19 Сенсор давления
20 Исполнительный элемент
21 Разъем питающего давления
22 Фильтр
23 Первый ходовой клапан
24 Второй ходовой клапан
25 Первый дроссельный обратный клапан
26 Второй дроссельный обратный клапан
27 Манометр
28 Предохранительный клапан
FK Контактное усилие
FK,номин. Номинальное контактное усилие
pp,номин. Номинальное пилотное давление
pV Питающее давление
pp,действ. Действительное пилотное давление
pA Базовое давление
pB Давление активирования токоприемника
ΔF Разностное контактное усилие.
Группа изобретение относится к токоприемникам для транспортных средств. Устройство для регулирования пневмоприводного токоприемника для транспортного средства содержит участок регулирования, который имеет первый регулятор давления, второй регулятор давления, а также активирующее устройство. При этом на токоприемнике расположен сенсор, который соединен проводящим сигнал соединением с регулятором контактного усилия. Первый регулятор давления проводящим сигнал соединением связан с регулятором контактного усилия, вторым регулятором давления, а также подачей давления. При этом второй регулятор давления имеет разъем для действительного пилотного давления pp,действ. из первого регулятора давления. Между вторым регулятором давления и подачей давления, а также между вторым регулятором давления и активирующим устройством предусмотрены проводящие сигнал соединения. Также заявлены токоприемник, имеющий устройство для регулирования пневмоприводного токоприемника, и способ регулирования устройства для регулирования пневмоприводного токоприемника. Технический результат заключается в быстрой адаптации контактного усилия FK к изменчивым эксплуатационным условиям. 3 н. и 9 з.п. ф-лы, 2 ил.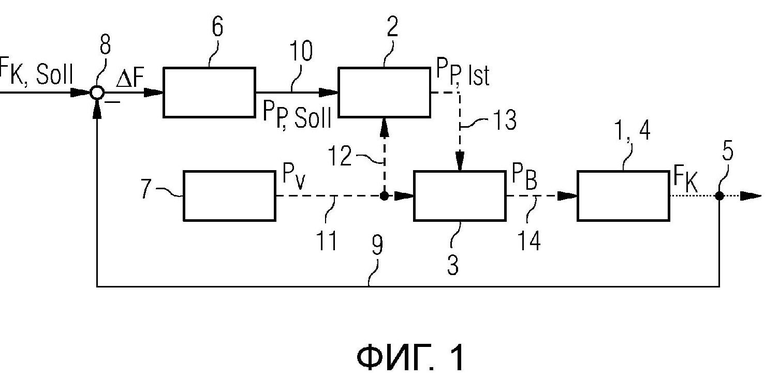
1. Устройство для регулирования пневмоприводного токоприемника для транспортного средства, при этом предусмотрен участок регулирования, который имеет первый регулятор давления, второй регулятор давления, а также активирующее устройство, отличающееся тем, что на токоприемнике (1) расположен по меньшей мере один сенсор (5), который соединен проводящим сигнал соединением с регулятором (6) контактного усилия,
что первый регулятор (2) давления проводящим сигнал соединением связан с регулятором (6) контактного усилия, вторым регулятором (3) давления, а также подачей (7) давления, при этом второй регулятор (3) давления имеет разъем для действительного пилотного давления pp,действ. из первого регулятора (2) давления, и
что между вторым регулятором (3) давления и подачей (7) давления, а также между вторым регулятором (3) давления и активирующим устройством (4) предусмотрены проводящие сигнал соединения.
2. Устройство по п.1, отличающееся тем, что регулятор (6) контактного усилия выполнен в виде электронного регулятора, при этом между регулятором (6) контактного усилия и указанным по меньшей мере одним сенсором (5), а также между регулятором (6) контактного усилия и первым регулятором (2) давления предусмотрены электрические проводящие пути.
3. Устройство по п.1, отличающееся тем, что регулятор (6) контактного усилия выполнен в виде электронного регулятора, при этом между регулятором (6) контактного усилия и указанным по меньшей мере одним сенсором (5) предусмотрены оптические проводящие пути, а также между регулятором (6) контактного усилия и первым регулятором (2) давления – электрические проводящие пути.
4. Устройство по одному из пп.1-3, отличающееся тем, что первый регулятор (2) давления выполнен в виде электропневматического регулятора, при этом между первым регулятором (2) давления и подачей (7) давления, а также между первым регулятором (2) давления и вторым регулятором (3) давления предусмотрены пневматические проводящие пути.
5. Устройство по одному из пп.1-4, отличающееся тем, что второй регулятор (3) давления выполнен в виде механико-пневматического регулятора, при этом между вторым регулятором (3) давления и подачей (7) давления, а также между вторым регулятором (3) давления и активирующим устройством (4) предусмотрены пневматические проводящие пути.
6. Устройство по одному из пп.1-5, отличающееся тем, что указанный по меньшей мере один сенсор (5) выполнен в виде расположенного на башмаке токоприемника (1) тензосенсора.
7. Устройство по одному из пп.2-6, отличающееся тем, что в памяти данных регулятора (6) контактного усилия сохранены контактные усилия FK.
8. Устройство по одному из пп.2-6, отличающееся тем, что в регулятор (6) контактного усилия имплементированы линии характеристик.
9. Токоприемник, имеющий устройство по одному из пп.1-8.
10. Способ регулирования устройства по одному из пп.1-8, отличающийся тем,
что действующее между токоприемником (1) и контактным проводом контактное усилие FK измеряется посредством указанного по меньшей мере одного сенсора (5), что из измеренного контактного усилия FK и номинального контактного усилия FK,номин. посредством регулятора (6) контактного усилия получается номинальное пилотное давление pp,номин., что из номинального пилотного давления pp,номин. посредством первого регулятора (2) давления путем настройки питающего давления pV подачи (7) давления получается действительное пилотное давление pp,действ., и что посредством второго регулятора (3) давления из настроенного посредством питающего давления pV базового давления pA и действительного пилотного давления pp,действ. создается давление pB активирования токоприемника.
11. Способ регулирования по п.10, отличающийся тем, что измеренное контактное усилие FK сохраняется в памяти данных регулятора (6) контактного усилия.
12. Способ регулирования по п.10 или 11, отличающийся тем, что номинальное пилотное давление pp,номин. получается посредством линий характеристик, имплементированных в регулятор (6) контактного усилия.
| DE 10126042 A1, 24.01.2002 | |||
| WO 2004026615 A1, 01.04.2004 | |||
| DE 19540913 C1, 06.02.1997 | |||
| Турбобур | 1957 |
|
SU115725A2 |

