Изобретение относится к транспортной технике, а именно к токосъемным устройствам электроподвижного состава.
Известен токоприемник, содержащий закрепленную шарнирно одним концом на основании штангу, на другом конце которой установлен контактный узел, пневмопривод, выполненный в виде закрепленного между основанием и штангой пневмоэлемента, соединенного с источником сжатого воздуха через регулятор давления, элемент настройки которого соединен со штоком пневмоцилиндра, подпоршневое пространство которого соединено с выходным штуцером датчика обнаружения вибрации штанги и связано с атмосферой посредством дроссельного канала.
К недостаткам известного устройства можно отнести следующее. Эффективная работа регулятора давления воздуха обусловлена точностью и минимальным временем запаздывания при воздействии на элемент настройки. Это требует достаточно высокой произвоидтельности поршневого насоса, который отбирает часть кинетической энергии движения штанги. Отмеченное обстоятельство ведет к появлению силы вязкого сопротивления, в данном случае вредной для динамичевских свойств штанги, отслеживающей высотные изменения токопровода и основания при заданном уровне нажатия. Сила сопротивления со стороны насоса вызывает повышение нажатия и, следовательно, увеличение износа контактирующих элементов при движении штанги вниз относительно основания (рабочий такт насоса). К тому же демпфирующие свойства насоса имеют односторонний характер, так как при движении штанги вверх (такт всасывания) силой сопротивления насоса можно пренебречь.
Производительность насоса при вибрации штанги зависит от ее высотного положения, поскольку при колебаниях относительно верхнего положения штанги подпоршневое пространство имеет максимальный объем и часть энергии поршня уходит на сжатие воздуха в пределах этого объема, а уж затем воздух уходит к потребителю (пневмоцилиндру). При вибрации относительно нижнего положения штанги производительность насоса будет более высокой, так как в этом случае упругие свойства подпоршневого столба воздуха будут меньше, а, следовательно, большая часть энергии поступит в пневмоцилиндр. Все это ведет к неодинаковой реакции регулятора на один и тот же характер вибрации штанги при разных ее высотных положениях, что вносит ошибку в уровень стабилизируемого нажатия.
Поршневой насос на входе имеет связь с атмосферой, что отрицательно влияет на надежность работы пневматических устройств, в частности клапанной системы, особенно в условиях вибрации, требует применения установки на входе в насос фильтра, масловлагоотделителя, что усложняет конструкцию, значительно повышает входное сопротивление.
Указанные недостатки снижают точность и надежность системы регулирования, что отрицательно сказывается на надежности токосъема известного устройства.
Цель изобретения - повышение надежности токосъема.
Указанная цель достигается тем, что в токоприемнике электроподвижного состава, содержащем штангу, один конец которой шарнирно закреплен на основании, а другой связан с контактным узлом, приводной пневмоэлемент, установленный между основанием и штангой и соединенный с источником сжатого воздуха через регулятор давления, настроечный элемент которого сочленен со штоком пневмоцилиндра, датчик вибрации штанги с входным и выходным соосно расположенными штуцерами, последний из которых соединен с подпоршневым пространством пневмоцилиндра, связанным с атмосферой посредством дроссельного канала, датчик вибрации штанги выполнен в виде закрепленного на ней инерционного золотникового клапана с по крайней мере одним сквозным каналом, входной штуцер через стабилизатор давления соединен с источником сжатого воздуха. Золотник подрессорен относительно корпуса клапана и установлен поперек общей продольной оси штуцеров с возможностью свободных колебаний относительно равновесного положения, соответствующего закрытому состоянию клапана, и сообщения штуцеров сквозным каналом при отклонении от равновесного положения. В золотниковом клапане масса m золотника и жесткость с пружин подрессоривания выбраны из соотношения
ν=  > νш, где ν и νш - соответственно собственная частота свободных колебаний золотника и критическая частота вертикальных колебаний штанги при взаимодействии токоприемника с токопроводом, характеризующаяся появлением отрывов контактного узла от токопровода.
> νш, где ν и νш - соответственно собственная частота свободных колебаний золотника и критическая частота вертикальных колебаний штанги при взаимодействии токоприемника с токопроводом, характеризующаяся появлением отрывов контактного узла от токопровода.
Корпус золотникового клапана выполнен герметичным, а золотник - с дроссельным каналом между надзолотниковым и подзолотниковым пространствами. Сквозной канал золотникового клапана выполнен в виде паза на боковой поверхности золотника.
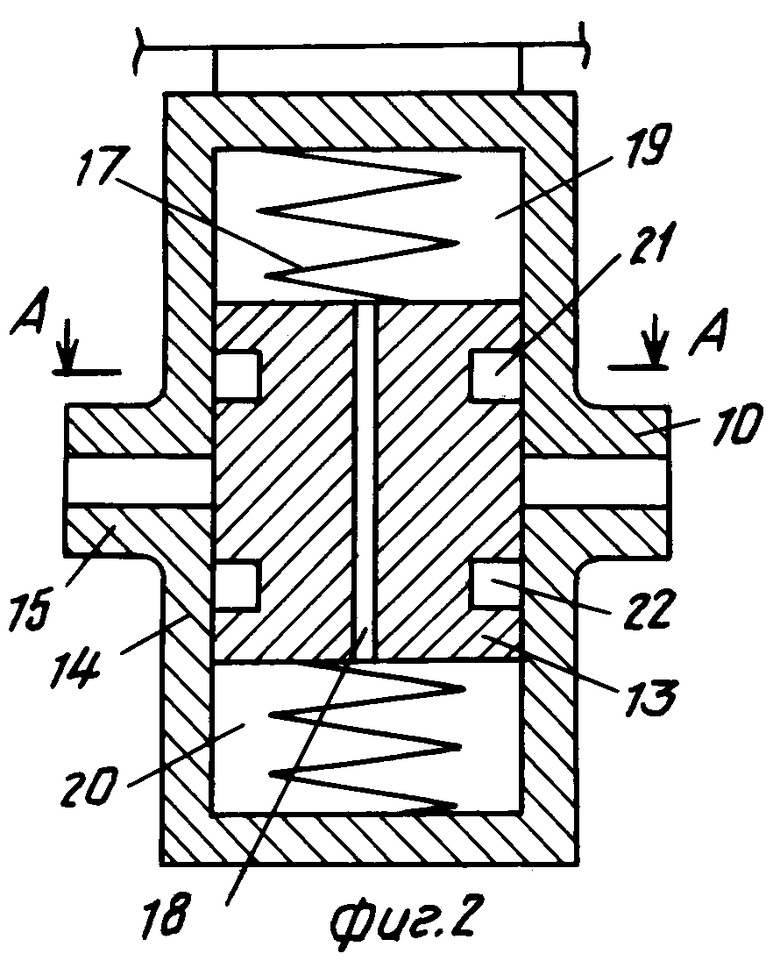
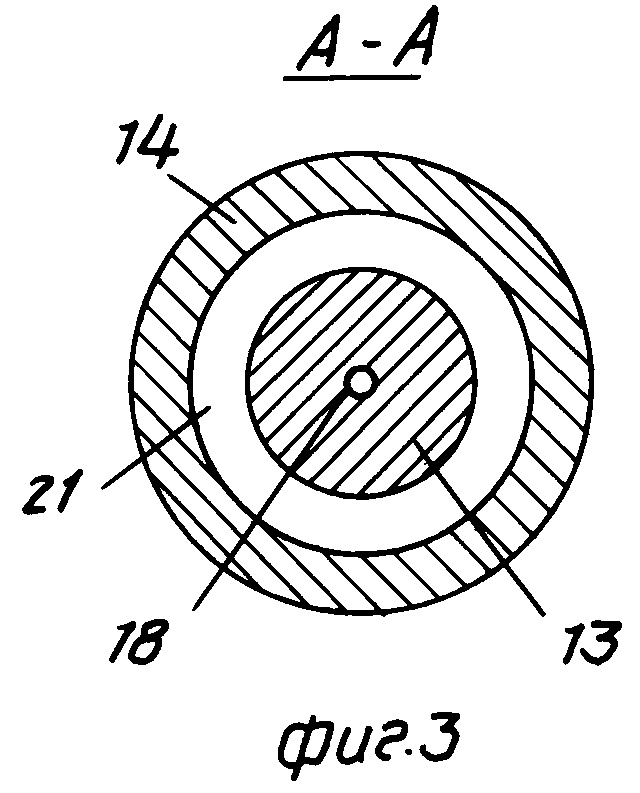
На фиг. 1 приведена схема предлагаемого токоприемника; на фиг.2 - клапан; на фиг.3 - разрез А-А на фиг.2.
Токоприемник содержит закрепленную шарнирно одним концом на основании штангу 1, на другом конце которой установлен контактный узел 2. В состав устройства входит пневмопривод, выполненный в виде закрепленного между основанием и штангой 1 пневмоэлемента 3, соединенного с источником жатого воздуха 4 через регулятор давления 5. Элемент настройки 6 регулятора соединен со штоком 7 пневмоцилиндра 8, подпоршневое пространство 9 которого соединено с выходным штуцером 10 датчика 11 вибрации штанги 1 и связано с атмосферой посредством дроссельного канала 12. Датчик 11 вибрации штанги 1 выполнен в виде снабженного инерционным золотником 13 клапана, корпус 14 которого закреплен на штанге 1, а входной штуцер 15 через стабилизатор давления 16 соединен с источником сжатого воздуха 4. Золотник 13 подрессорен относительно корпуса 14 клапана и установлен поперек канала, сообщающего входной 15 и выходной 10 штуцеры, с возможностью свободных вертикальных колебаний относительно своего равновесного положения, которому соответствует закрытое состояние клапана. Золотник 13 снабжен по меньшей мере одним сквозным каналом, сообщающим входной 15 и выходной 10 штуцеры клапаны при отклонении золотника 13 от положения равновесия.
Корпус 14 клапана выполнен герметичным. Золотник 13 снабжен дроссельным каналом 18, сообщающим подзолотниковое 19 и надзолотниковое 20 пространства.
Золотник 13 снабжен двумя сквозными каналами 21 и 22, каждый из которых поочередно сообщает входной 15 и выходной 10 штуцеры клапана при отклонении золотника 13 от положения равновесия, соответственно в одну и другую сторону. Каналы выполнены в виде пазов на боковой поверхности золотника 13.
Токоприемник работает следующим образом.
Сжатый воздух от источника 4 через стабилизатор давления 16 подается к входному штуцеру 15 датчика 11. Стабилизатор 16 поддерживает уровень давления на входе в датчик 11 для обеспечения необходимой точности работы системы регулирования. При отсутствии вертикальных колебаний штанги 1 золотник 13 находится в положении равновесия, в котором удерживается пружинами 17 и свободных колебаний не совершает. Входной 15 и выходной 10 штуцеры клапана разобщены, так как каналы 21 и 22 выполнены на участках боковой поверхности золотника 13, которые в данный момент не находятся в створе отверстий штуцеров 15 и 10. Сжатый воздух от стабилизатора 16 в подпоршневое пространство 9 пневмоцилиндра 8 не попадает и элемент настройки 6 регулятора 5 обеспечивает работу последнего в номинальном режиме, поддерживая установленный минимальный уровень нажатия.
При появлении вибрации штанги 1 корпус 14, закрепленный на штанге, начинает совершать периодические колебания.
При ν > νш золотник 13 совершает колебания синфазно с колебаниями корпуса 14 клапана. Амплитуда колебаний золотника 13 зависит от ускорения, с которым колеблется штанга.
Параметры золотника 13 и его подрессоривания подобраны так, что каналы 21 и 22 начинают поочередно пропускать воздух от входного 15 к выходному 10 штуцеру при превышении порога ускорения штанги 1, который предшествует резкому ухудшению стабильности нажатия и появлению отрывов контактного узла 2 от токопровода. Воздух через датчик 11 начинает поступать в подпоршневое пространство 99 пневмоцилиндра 8 и воздействует на поршень, шток 7 которого, соединенный с элементом настройки 6, изменяет установку регулятора 5, увеличивая уровень давления в пневмоэлементе 3. Нажатие на токопровод увеличивается, вероятность отрывов резко уменьшается. При прекращении опасных вибраций штанги 1 амплитуда колебаний золотника 13 снижается и каналы 21 и 22 не сообщают входной 15 и выходной 10 штуцеры. Из подпоршневого пространства 9 воздух через дроссельный канал 13 выходит в атмосферу и подпружиненный поршень занимает исходное положение, возвращая элемент настройки 6 на заранее заданный уровень. Нажатие при этом уменьшается до установленного минимального значения.
Диаметр дроссельного канала 18 золотника 13 подобран таким образом, чтобы обеспечить гашение амплитуды колебаний золотника 13 при частоте, близкой к резонансной, т.е. при ν ≈ νш. Собственная частота колебаний золотника 13 выбрана из условия ν > νш для того, чтобы обеспечить синфазную с колебаниями штанги 1 его работу, т.е. чтобы его резонансная частота находилась за пределами частоты колебаний штанги, являющихся следствием внешних воздействий (стрела провеса токопровода, скорость движения, длина пролета токопровода, вибрации основания), на обработку которых рассчитана конструкция токоприемника.
Наличие двух каналов 21 и 22 на золотнике 13 позволяет сделать поступление воздуха в пневмоцилиндре 8 более равномерным. Размеры сечения каналов 21 и 22 могут быть подобраны для конкретных условий работы и типов токосъемных устройств.
Настройка системы регулирования, установка пороговых значений срабатывания, времени задержки, точности работы может оперативно осуществляться посредством настройки стабилизатора 16 (подбор уровня давления на выходе), регулировкой сечения дроссельного канала 12, расстоянием крепления датчика 11 от оси вращения штанги 1. Входной 15 и выходной 10 штуцеры датчика 11 оснащены гибкими воздухопроводами, что позволяет практически исключить влияние на штангу 1 мешающей массы. Сам датчик 11 имеет незначительные габариты и массу.
Использование изобретения позволяет значительно повысить точность и быстродействие системы регулирования за счет применения датчика вибрации не в качестве насоса, а в качестве клапана, сообщающего источник сжатого воздуха с пневмоцилиндром привода элемента настройки.
Исключается влияние мешающей для работы штанги силы вязкого сопротивления, свойственной поршневому насосу. Датчик не имеет на входе прямой связи с атмосферой, не требует специальных мер по очистке и осушению воздуха и может устанавливаться в любой штанге токоприемника без механической связи с основанием. Точность его работы не зависит от высотного положения точки токоприемника, на которой он закреплен. Датчик прост в изготовлении, может быть выполнен с использованием стандартных элементов пневмораспределительных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник электроподвижного состава | 1984 |
|
SU1234247A1 |
| Токоприемник транспортного средства | 1985 |
|
SU1276535A2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ НАЖАТИЯ ТОКОПРИЕМНИКА | 1991 |
|
RU2023602C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ ЖЕСТКОСТИ ТОКОПРИЕМНИКА ПРЕИМУЩЕСТВЕННО С ПОЛОЗОМ | 1991 |
|
RU2025311C1 |
| Токоприемное устройство | 1990 |
|
SU1801808A1 |
| Токоприемник транспортного средства | 1987 |
|
SU1463544A1 |
| Токоприемник | 1988 |
|
SU1576368A1 |
| Токоприемник транспортного средства | 1991 |
|
SU1782792A1 |
| Токоприемник транспортного средства | 1985 |
|
SU1306755A1 |
| Токоприемник электроподвижного состава | 1983 |
|
SU1134423A1 |

Использование: в электрооборудовании транспортных средств с электротягой. Сущность изобретения: в токоприемнике, содержащем регулятор давления, штангу с контактным узлом, пневмопривод, датчик вибрации штанги, соединенный своим выходом с элементом настройки регулятора через пневмоцилиндр, датчик обнаружения вибрации выполнен в виде инерционного золотникового клапана, вход которого соединен с источником сжатого воздуха через стабилизатор давления. Инерционный клапан содержит подрессоренный золотник, установленный с возможностью свободных колебаний относительно своего положения равновесия. При появления вибраций штанги золотник обеспечивает подачу воздуха в пневмоцилиндр, воздействующий на элемент настройки регулятора с высокой точностью, что повышает надежность токосъема. 3 з.п. ф-лы, 3 ил.
ν =  > νш,
> νш,
где ν и νш - соответственно собственная частота свободных колебаний золотника и критическая частота вертикальных колебаний штанги при взаимодействии токоприемника с токопроводом, характеризующаяся появлением отрывов контактного узла от токопровода.
| Михеев В.П | |||
| и др | |||
| Результаты динамических испытаний пневматического токоприемника транспорта на электромагнитном подвесе с линейным тяговым приводом | |||
| Проблема создания скоростного пассажирского транспорта на электромагнитной подвеске с линейным тяговым двигателем | |||
| науч | |||
| тр | |||
| М.: ВНИИПИ гидротурбопровод, 1988, с.104-111. |
