Настоящее изобретение в общем относится к системам перекачки текучей среды и, конкретнее, морским загрузочным системам, в частности, таким как шарнирные загрузочные рукава для перекачки текучей среды из одного местоположения в другое (загрузка и/или разгрузка).
Текучая среда здесь понимается как жидкость или газообразный продукт, такой как нефтепродукт, газ или химический продукт.
Указанный тип продукта подлежит перекачке, например, между судном и причалом или пристанью или между двумя судами. На практике система перекачки, таким образом, крепится к земле на транспортном средстве или морском судне.
Для морских загрузочных систем это могут быть:
– традиционные морские загрузочные рукава, такие как описанные, например, в патентных заявках FR2813872, FR2854156 и FR2931451;
– морские загрузочные рукава без основания, которые позволяют достигать низких точек соединения, такие как описанные, например, в заявке на патент FR2964093;
– бункерные или гибридные загрузочные рукава (жесткая часть и гибкая часть), такие как описанные, например, в заявке на патент FR3003855.
Указанные морские загрузочные системы могут работать с электрическими исполнительными механизмами.
Использование таких исполнительных механизмов уже было предусмотрено в вышеупомянутой заявке на патент FR2931451.
Когда соединительная муфта загрузочного рукава, описанного в этой заявке на патент FR2931451, соединена с целевым трубопроводом, компьютер отправляет всем исполнительным механизмам инструкцию на расцепление так, чтобы делать перемещения системы свободными, чтобы позволять соединительной муфте повторять перемещения целевого трубопровода (режим «свободного хода»).
Преимущество состоит в том, что отсутствует необходимость активно направлять рукав для того, чтобы заставлять его повторять перемещения конструкций, удерживающих рукав, и целевого трубопровода, и тем самым для того, чтобы не потреблять электричество во время фазы перекачки.
В случае электрического исполнительного механизма расцепление приводит к необходимости реализации муфты сцепления между редуктором и приводной шестерней исполнительного механизма в ущерб компактности этого исполнительного механизма.
Настоящее изобретение в частности направлено на исключение этого недостатка. Оно в более общем смысле направлено на всю электрическую систему перекачки текучей среды с улучшенной производительностью.
С этой целью настоящее изобретение предлагает систему для перекачки текучей среды из положения хранения в целевой трубопровод или из этого целевого трубопровода в положение хранения, причем система содержит трубчатую линию перекачки текучей среды, содержащую на одном из ее концов соединительную систему, выполненную с возможностью соединения с целевым трубопроводом для перекачки текучей среды, и электрические исполнительные механизмы для управления перемещением линии перекачки в пространстве, каждый с помощью приводного вала, отличающуюся тем, что каждый из исполнительных механизмов для управления перемещением линии перекачки содержит электрический двигатель с выходным валом, редуктор скорости, приводной вал, вращательно приводимый в движение выходным валом двигателя посредством редуктора скорости, который является реверсивным, так, чтобы позволять приводному валу поворачиваться, когда приводной крутящий момент непосредственно прикладывается к нему, и средства торможения для запирания исполнительного механизма в положении, когда управление перемещением находится в процессе, и этот исполнительный механизм не активируется для этого управления.
Вопреки всем ожиданиям реверсивные редукторы скорости, доступные на рынке, оказались способны работать в реверсивном режиме с очень высокими понижающими передаточными отношениями, требуемыми в области систем перекачки текучей среды с трубчатой линией перекачки (которых может быть до 700 на практике), и тем самым позволять достигать искомой цели компактности с допустимыми крутящими моментами реверсивности.
Более того, в результате исполнительный механизм требует небольшого обслуживания. Он уже требует меньше, чем традиционный гидравлический исполнительный механизм, и отсутствие муфты сцепления дополнительно уменьшает эту необходимость в обслуживании.
Вышеуказанные положения, более того, обеспечивают возможность достижения других целей при необходимости.
В частности, реверсивность исполнительного механизма может, в режиме свободного хода, позволять производить ток посредством работы в качестве генератора тока. В результате этого возникает система перекачки текучей среды, которая является особенно экономичной, так как в режиме свободного хода она не только не потребляет энергию, но производит ее. Этот исполнительный механизм также может действовать в режиме генератора тока в случае торможения рукава в частности во время аварийного разъединения.
Настоящее изобретение также обеспечивает шарнирный рукав для перекачки текучей среды, содержащий систему перекачки, которая определена выше, причем система перекачки содержит шарнирный трубопровод, смонтированный на опоре, имеющий три степени свободы вращения в пространстве относительно опоры, причем перемещения в каждой из степеней свободы управляются по меньшей мере одним из электрических исполнительных механизмов для управления перемещением линии перекачки в пространстве.
Также другие особенности и преимущества изобретения будут представлены в нижеследующем описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На сопровождающих чертежах, приведенных в качестве неограничивающего примера:
– Фигура 1 представляет собой обзорное изображение шарнирного рукава для перекачки текучей среды на причале с установкой электрической части согласно первому варианту осуществления;
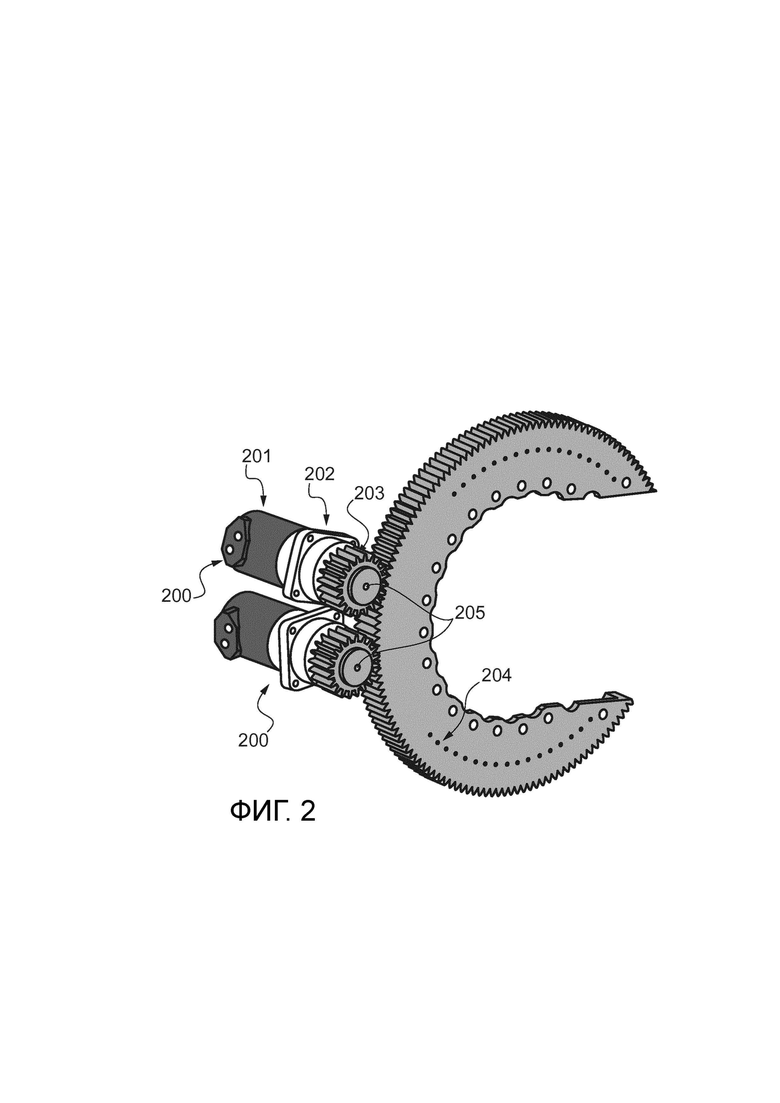
– Фигура 2 иллюстрирует общий вид двух электрических исполнительных механизмов, приводящих в движение зубчатое колесо согласно первому варианту осуществления;
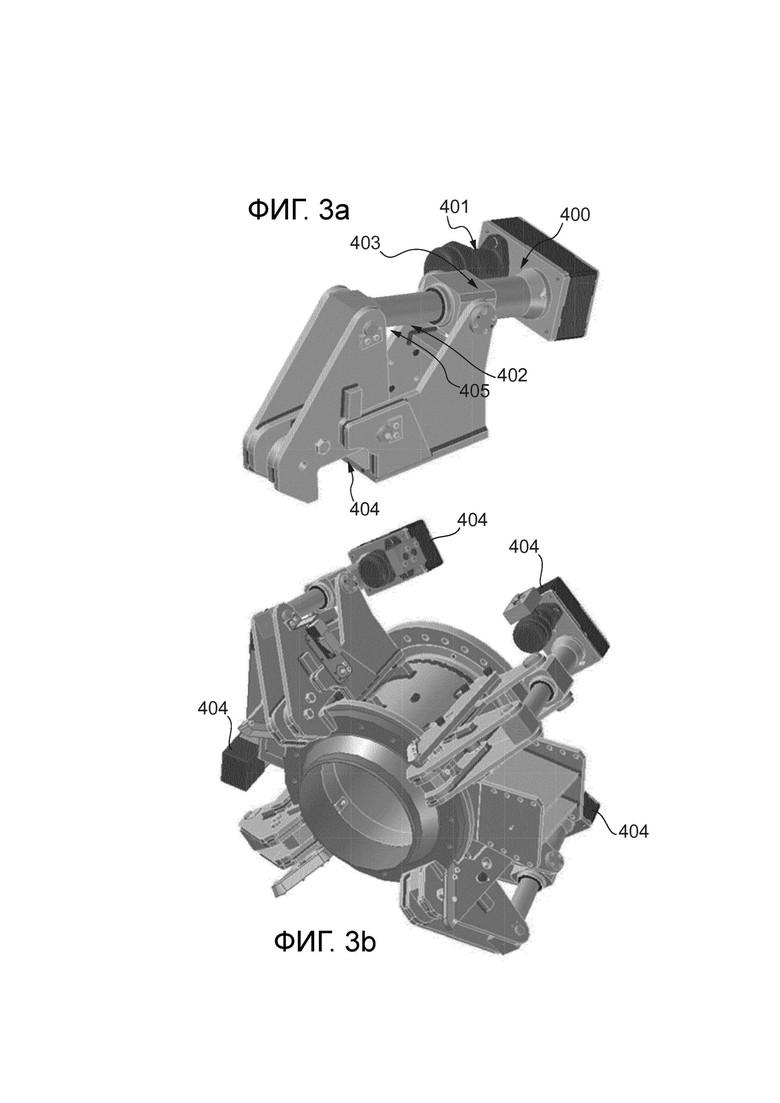
– Фигура 3a иллюстрирует общий вид ответвления соединительной муфты согласно первому варианту осуществления изобретения;
– Фигура 3b иллюстрирует общий вид соединительной муфты, проиллюстрированной ранее, в положении монтажа;
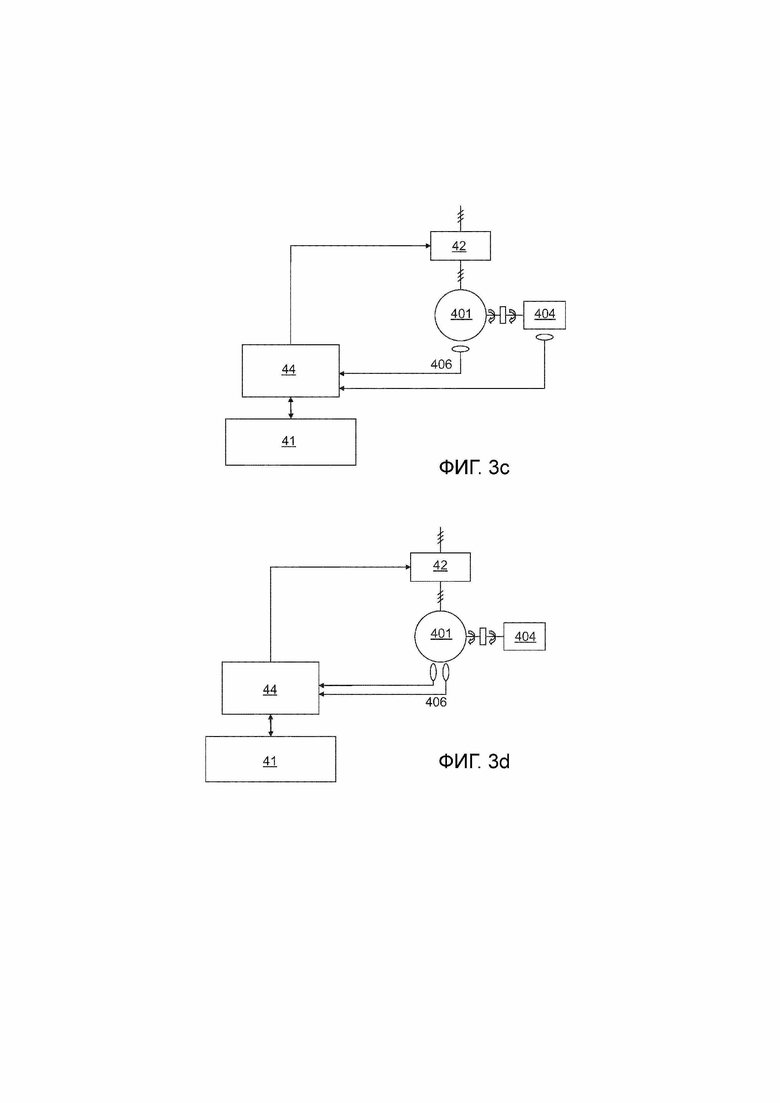
– Фигура 3c иллюстрирует рабочую схему проверки закрытия соединительной муфты, когда проверка выполняется с использованием датчика силы зажима;
– Фигура 3d представляет собой рабочую схему проверки закрытия соединительной муфты, когда проверка выполняется с использованием датчика крутящего момента зажима;
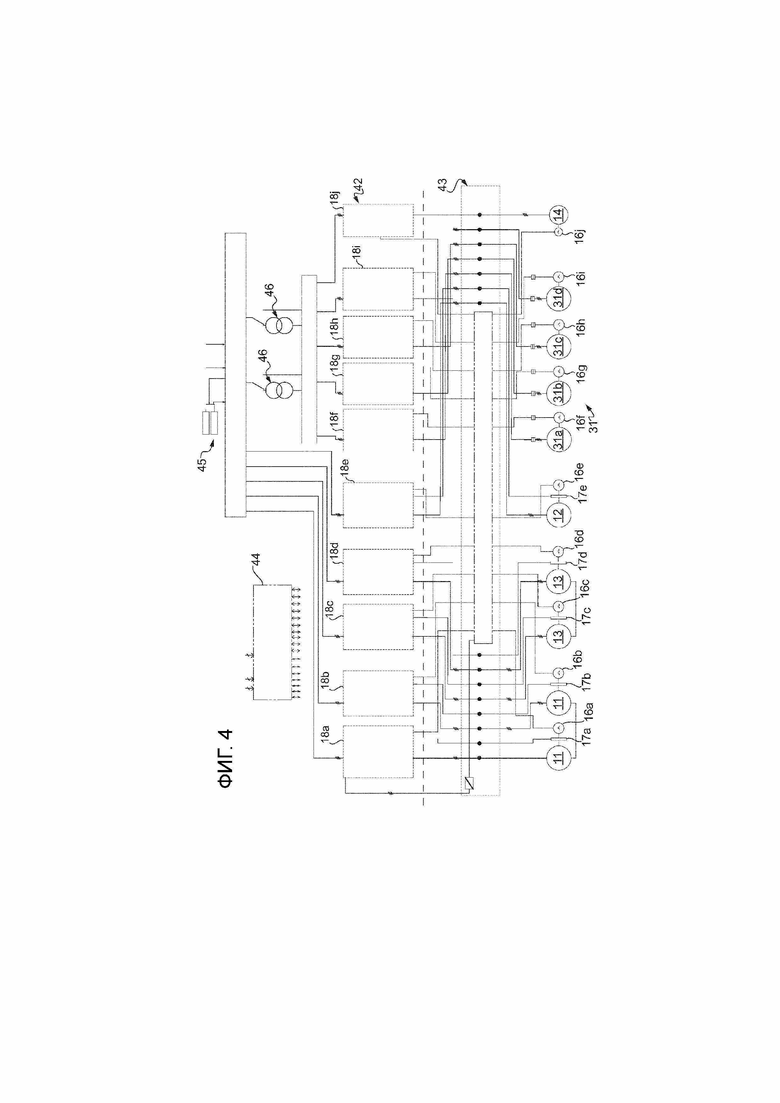
– Фигура 4 представляет собой схему электрической архитектуры варианта согласно изобретению;
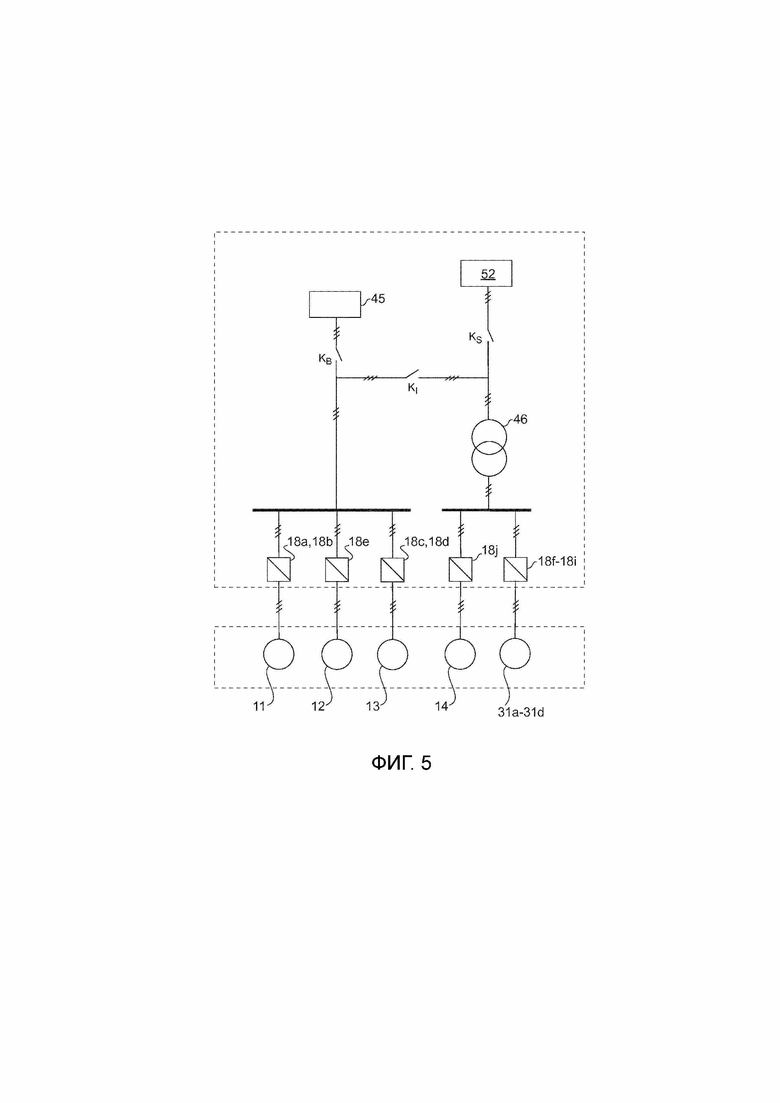
– Фигура 5 иллюстрирует обзорную электрическую схему регенерацию энергии.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Описание будет далее выполнено со ссылкой на Фигуру 1 примера системы 10 для перекачки текучей среды из положения хранения в целевой трубопровод 33, расположенный на судне 3, и из этого целевого трубопровода 33 в положение хранения, причем система 10 перекачки текучей среды содержит линию перекачки текучей среды, содержащую на одном из ее концов соединительную муфту 31 типа «QCDC», что означает «Быстроразъемное соединение», которая выполнена с возможностью соединения с целевым трубопроводом 33 для перекачки текучей среды, и электрические исполнительные механизмы 11, 12, 13 для управления перемещением линии перекачки в пространстве, каждый с помощью приводного вала.
Здесь система 10 для перекачки текучей среды представляет собой морской загрузочный рукав.
Более того, система 10 перекачки текучей среды связана с резервуаром для текучей среды, не показанным на фигурах.
Из этого следует, что система 10 перекачки текучей среды содержит электрическую конструкцию и механическую конструкцию.
Механическая конструкция содержит конструкцию потока текучей среды и манипуляционную конструкцию. Электрическая конструкция будет описана позже в описании.
Манипуляционная конструкция содержит основание 21, внутреннюю трубу 22, внешнюю трубу 23 и соединительную систему 32, вместе образующие шарнирный рукав 2.
Шарнирный рукав 2 здесь представляет собой шарнирный рукав, уравновешенный посредством противовесов 19a и 19b, в частности, посредством противовеса 19a, расположенного на одном конце внутренней трубы 22, и другого противовеса 19b, расположенного на пантографе 15.
Основание 21 зафиксировано на пристани 5. Основание 21 также может быть зафиксировано на транспортном средстве или на морском судне.
Внутренняя труба 22 соединена первым концом с основанием 21 и вторым концом с первым концом внешней трубы 23 с помощью поворотного шарнира. Внешняя труба 23 соединена вторым концом с первым концом соединительной системы 32 с помощью поворотного шарнира.
Маневрирующие электрические исполнительные механизмы 11, 12, 13 позволяют системе перекачки текучей среды быть шарнирной.
Более того, система перекачки текучей среды приводится в действие, в частности, системой 15 пантографа. Система 15 пантографа обычно расположена выше основания 21 на внутренней трубе 22.
Вращение вокруг вертикальной оси окружности, образованной трубами 22 и 23, управляется вращением маневрирующего электрического исполнительного механизма 12.
Приведение в действие пантографа 15 управляется вращением второго маневрирующего электрического исполнительного механизма 13 и позволяет удлинять внешнюю трубу 23.
Более того, вращение внутренней трубы 22 вокруг горизонтальной оси, параллельной горизонтальной оси вращения внешней трубы 23, обеспечивается посредством маневрирующего электрического исполнительного механизма 11.
Более того, соединительная система 32 содержит электрический исполнительный механизм 14 для системы 14’ аварийного разъединения (или «ERS»). Система 14’ аварийного разъединения, как известно, по существу содержит два клапана, соединенных с использованием тарелки с отверстием, управляемым по меньшей мере электрическим исполнительным механизмом 14.
Соединительная система 32 на практике имеет три поворотных шарнира, обозначенных 32a, 32b и 32c, и оборудована соединительной муфтой 31 на ее свободном конце и также содержит систему 14’ аварийного разъединения.
Система 14’ аварийного разъединения расположена между поворотным шарниром 32b и поворотным шарниром 32c.
Более того, соединительная муфта 32 содержит четыре электрических исполнительных механизма 31a, 31b, 31c, 31d соединительной муфты (смотри описание Фигур 3a–3d далее).
Полная механическая конструкция расположена здесь в зоне ATEX. ATEX получила свое название из французского названия директивы 94/9/EC: Appareils destinés à être utilisés en ATmosphères EXplosives
Электрическая конструкция разделена между двумя зонами: зоной ATEX и безопасной областью.
Зона ATEX в этом случае соответствует зоне с взрывоопасной атмосферой. В этой атмосфере присутствует смесь воздуха и воспламеняющихся веществ в форме газа, пара или пыли. Эта атмосфера представляет риск взрыва при наличии искр или чрезмерного нагрева. Электрическая конструкция должна в связи с этим быть выполнена с возможностью избежания образования электрических дуг в зоне ATEX.
Именно поэтому в зоне ATEX определенные устройства электрически изолированы для избежания электрических дуг во время фазы соединения из–за чрезмерной разности потенциалов между целевым трубопроводом 33 судна 3 и соединительной системой 32.
С другой стороны, безопасная область представляет собой зону, в принципе не имеющую атмосферу с риском взрыва.
В зоне ATEX расположена механическая конструкция, обеспеченная электрическими исполнительными механизмами 11, 12, 13, 14, 31a, 31b, 31c, 31d.
Еще в зоне ATEX также расположен электрический шкаф 43, устанавливающий связь между шкафом 42 управления и электрическими исполнительными механизмами 11, 12, 13, 14, 31a, 31b, 31c, 31d.
Электрический шкаф 43 представляет собой взрывоустойчивый шкаф, содержащий соединительные выводы. Он имеет корпус, обозначенный «Ex d». Это означает, что корпус выдерживает давление, развиваемое при внутреннем взрыве взрывной смеси, и тем самым предотвращает передачу взрыва в атмосферу, окружающую корпус.
В качестве варианта, электрический шкаф 43 представляет собой шкаф, имеющий корпус, обозначенный «Ex e». Это означает, что корпус имеет усиленную безопасность.
В зоне ATEX также имеется шкаф 42 управления. Шкаф 42 управления содержит один контроллер на электрический исполнительный механизм (на практике привод). Шкаф 42 управления снабжен изолирующим трансформатором 46 и сообщается с пультом 41 управления. Более того, шкаф 42 управления отправляет информацию электрическим исполнительным механизмам 11, 12, 13,14, 31a, 31b, 31c, 31d с помощью электрического шкафа 43.
Шкаф 42 управления имеет корпус, обозначенный «Ex p». Это означает, что предотвращается попадание окружающей атмосферы внутрь корпуса шкафа 42 управления посредством поддержания внутри корпуса защитного газа с давлением больше, чем давление окружающей атмосферы.
В зоне ATEX также расположен пульт LCP 41 управления, благодаря которому оператор может отправлять установки электрическим исполнительным механизмам 11, 12, 13,14, 31a, 31b, 31c, 31d. Пульт LCP 41 управления также защищен.
В безопасной области расположен PLC 44 (PLC означает программируемый логический контроллер) и аварийный источник 45 питания.
Аварийный источник 45 питания работает, когда основной источник больше не способен обеспечивать электропитание, в частности, электропитание для электрических исполнительных механизмов 11, 12, 13,14, 31a, 31b, 31c, 31d. Аварийный источник 45 питания обеспечивает возможность маневрирования электрических исполнительных механизмов 11, 12, 13,14, 31a, 31b, 31c, 31d в течение короткого периода, обеспечивая возможность аварийного разъединения, сопровождающегося аварийным отведением на несколько метров и по возможности полным отведением шарнирного рукава 2.
Далее будет приведено описание со ссылкой на Фигуру 2 электрического исполнительного механизма 200, содержащего электрический двигатель 201 с выходным валом, не показан, редуктором 202 скорости, приводным валом 205, вращательно приводимым в движение выходным валом двигателя посредством редуктора 202 скорости, который является реверсивным, так, чтобы позволять приводному валу 205 поворачиваться, когда приводной крутящий момент непосредственно прикладывается к нему, и тормоз, не показан, для запирания электрического исполнительного механизма 200 в положении, когда команда на перемещение находится в процессе, и этот электрический исполнительный механизм 200 не был активирован для этой команды.
Более того, Фигура 2 представляет конкретнее два электрических исполнительных механизма 200, каждый из которых приводит в движение сегментированное зубчатое колесо 204 с помощью шестерни 203, соединенной с приводным валом 205. В общем, один электрический исполнительный механизм 200 способен приводить в движение зубчатое колесо 204. Однако, когда один электрический исполнительный механизм 200 не имеет достаточно мощности для вращательного приведения в движение зубчатого колеса, могут быть смонтированы два электрических исполнительных механизма 204.
На практике понижающее передаточное отношение, получаемое с редуктором 202 скорости, лежит между 25 и 700 для электрического исполнительного механизма 200. Это неограничивающие значения. Необходимо добавлять передаточное отношение между зубчатым колесом 204 и шестерней 203, которое может изменяться между 2 и 20.
Электрический двигатель 201, применяемый здесь, представляет собой бесщеточный двигатель.
Редуктор 202 скорости представляет собой редуктор с блоком шестерен эпициклической передачи. Такой редуктор 202 скорости способен работать реверсивным образом, поскольку производится мало трения, и эффективность редуктора 202 скорости является высокой, порядка 90%. Реверсивная работа описана подробно позже.
Тормоз, не показан, здесь представляет собой электрически активируемый механический тормоз, оборудованный фрикционными накладками. Он смонтирован до электрического двигателя 201. Другими словами, имеется следующая конфигурация: тормоз соединен с электрическим двигателем 201, который соединен с редуктором 202 скорости, который сам соединен с шестерней 203.
В качестве варианта, тормоз также может быть интегрирован в электрический двигатель 200.
Такой узел, образованный двумя исполнительными механизмами 200 и зубчатым колесом 204, может быть реализован в системе перекачки на Фигуре 1 в местоположении каждого из узлов, образованных электрическими исполнительными механизмами 11, 12, 13, сцепленными с зубчатым колесом.
Как ясно проиллюстрировано на Фигурах 3a и 3b, соединительная система 32 оборудована для связи с целевым трубопроводом 33 соединительной муфты 31, оборудованной четырьмя электрическими исполнительными механизмами 31a, 31b, 31c и 31d. Целью является обеспечение оптимального зажима в местоположении связи. Соединительная муфта 31 содержит с этой целью четыре зажимные губки 404, позволяющие обеспечивать крепление к целевому трубопроводу 33.
Как проиллюстрировано на Фигуре 3b, четыре зажимные губки 404 приводятся в действие посредством четырех электрических исполнительных механизмов 31a, 31b, 31c и 31d. Альтернативный вариант осуществления будет заключаться в применении одного электрического исполнительного механизма для приведения в действие четырех зажимных губок 404.
Каждый электрический исполнительный механизм 31a, 31b, 31c и 31d, содержащий редуктор 400 скорости и электрический двигатель 401, связан с приводной системой и датчиком положения. Датчик положения, не показан, может представлять собой кодер.
Приводная система содержит приводной винт 402 и приводную гайку 403.
К техническим признакам электрического исполнительного механизма 31, 31b, 31c и 31d, изложенным выше, следует добавить измерение крутящего момента или силы зажима посредством привода.
Со ссылкой на Фигуры 3c и 3d, зажимная губка 404 приводится в действие электрическим двигателем 401, который генерирует крутящий момент двигателя. Крутящий момент двигателя передается зажимной губке 404 с помощью редуктора скорости и приводной системы.
На практике датчик положения обозначает линейное перемещение приводной системы. Предпочтительно, датчик положения также может представлять собой датчик числа оборотов электрического двигателя 401.
С целью проверки крутящего момента зажима зажимной губки 404 косвенное измерение крутящего момента зажима выполняется с помощью измерения потребляемого тока.
В первой альтернативе, чей принцип работы проиллюстрирован на Фигуре 3с, датчик силы представляет собой датчик тока, потребляемого электрическим двигателем 401.
Во второй альтернативе, чей принцип работы проиллюстрирован на Фигуре 3d, датчик силы представляет собой датчик тока, потребляемого для генерации крутящего момента вращения.
Как проиллюстрировано на Фигуре 3с, электрический двигатель 401 генерирует крутящий момент двигателя, который приводит в движение зажим зажимной губки 404. Конкретнее, когда электрический двигатель 401 генерирует крутящий момент двигателя, электрический двигатель 401 приводит в движение приводной винт 402. Датчик положения отправляет измеренное значение положения API 44. API 44 сообщает измеренное значение положения командному 41 пульту. Оператор может подавать значение установки, которое отправляется в API 44. Согласно значению установки, измеренному значению и значению косвенно измеренного крутящего момента зажима зажимной губки 404 API 44 отправляет установку электрическому двигателю с помощью шкафа 42 управления.
Принцип проверки зажима, проиллюстрированный на Фигуре 3d, является таким же, что представлен ранее. Измерение значения крутящего момента зажима было заменено на измерение крутящего момента вращения в электрическом двигателе 401. Этот крутящий момент вращения измеряется посредством измерения тока, потребляемого посредством использования привода.
В варианте работы значение установки может автоматически быть отправлено API 44 в шкаф 42 управления.
Во всех случаях цель проверки зажима заключается в получении оптимальной и равномерной силы зажима на зажимных губках 404.
Согласно другому варианту осуществления изобретения, представленному на Фигуре 4, проиллюстрирована электрическая схема всей системы.
Электрические компоненты распределены на две зоны, которые разделены штрихами на схеме на Фигуре 4.
Электрические исполнительные механизмы 11, 12, 13, 14, 31a–31d представлены в рабочей зоне.
Маневрирующие электрические исполнительные механизмы 11, 12, 13 содержат, в частности, тормоз 17a–17e.
Электрические исполнительные механизмы 31a, 31b, 31c, 31d содержат, в частности, аварийное разъединение 20, 20b, 20c и 20d. Аварийное разъединение 20, 20b, 20c и 20d обеспечивает возможность электрического отсоединения двигателей 31, 31b, 31c и 31d, когда аварийное разъединение 14’ приводится в действие.
Все электрические исполнительные механизмы 11, 12, 13, 14, 31 здесь содержат кодер 16a–16j. Кодеры 16a–16j обеспечивают возможность определения в реальном времени положения механической конструкции 2 и, конкретнее, внутренней трубы 22 и внешней трубы 23, а также зажимных губок 404 и системы 14 аварийного разъединения. На основе этой информации будет, в частности, возможно выводить положение конца механической конструкции 2, который образует связь с целевым трубопроводом 33.
Информация, поступающая от различных кодеров 16a–16e, также может обеспечивать возможность выполнения функции PMS, другими словами «Системы отслеживания положения», и, таким образом, обнаружения входа механической конструкции 2 в критические зоны рабочего пространства и тем самым запуска аварийных сигналов. Информация, поступающая от различных кодеров 16a–16e, таким образом, также обеспечивает возможность автоматического запуска последовательностей для аварийного разъединения ERS с помощью электрического исполнительного механизма 14.
Конкретнее в отношении электрических исполнительных механизмов 31a, 31b, 31c, 31d, наличие кодера 16f–16i на каждом электрическом исполнительном механизме представляет преимущества и по созданию соединения, и по созданию отсоединения.
При создании соединения с землей на транспортном средстве или плавучем средстве, в частности, судне 3 соединительная муфта 31 будет соединяться в три этапа.
На первом этапе соединительная муфта 31 должна преодолевать крутящий момент трения разных компонентов соединительной муфты 31, в частности, зажимных губок 404. На первом этапе необходимый крутящий момент двигателя высокий, но скорость низкая.
Второй этап соответствует фазе приближения разных компонентов соединительной муфты 31. На втором этапе крутящий момент двигателя низкий, но скорость высокая.
Третий этап соответствует фазе зажима. На третьем этапе крутящий момент двигателя высокий, но скорость низкая.
Один кодер 16f–16i на электрический исполнительный механизм 31a, 31b, 31c, 31d, более того, обеспечивает возможность определения положения разных компонентов соединительной муфты 31 и адаптации крутящего момента двигателя и скорости, передаваемой с помощью API 44.
Один кодер 16f–16i на электрический исполнительный механизм 31a, 31b, 31c, 31d также обеспечивает возможность отправки информации о соединенном или отсоединенном состоянии соединительной муфты 31 и обеспечения оптимального и равномерного запирания на каждой из зажимных губок 404 на основе информации о потреблении тока, считываемой в каждом кодере 16f–16i.
При создании отсоединения с землей на транспортном средстве или плавучем средстве, в частности, судне 3, соединительная муфта 31 будет открепляться в три этапа.
На первом этапе соединительная муфта 31 должна преодолевать крутящий момент трения разных соединенных компонентов соединительной муфты 31, в частности, зажимных губок 404. На первом этапе необходимый крутящий момент двигателя высокий, но скорость низкая.
Второй этап соответствует фазе отведения разных компонентов соединительной муфты 31. На втором этапе крутящий момент двигателя низкий, но скорость высокая.
Третий этап соответствует фазе размещения в упор. На третьем этапе крутящий момент двигателя высокий, но скорость низкая.
Настоящее изобретение имеет преимущество установки кодера на каждом электрическом исполнительном механизме 31a, 31b, 31c, 31d.
Один кодер 16f–16i на электрический исполнительный механизм 31a, 31b, 31c, 31d обеспечивает возможность определения положения разных компонентов соединительной муфты 31 и адаптации крутящего момента двигателя и скорости, передаваемой с помощью API 44.
Один кодер 16f–16i на электрический исполнительный механизм 31a, 31b, 31c, 31d также обеспечивает возможность отправки информации о соединенном или отсоединенном состоянии соединительной муфты 31.
Более того, благодаря считыванию в реальном времени положения зажимных губок 404 с помощью кодеров 16f–16i будет обнаружен любой риск утечки в зоне соединения из–за непреднамеренного открытия одной или нескольких зажимных губок 404 во время операции загрузки или разгрузки. Уровень безопасности, таким образом, увеличивается.
Более того, возвращаясь к электрической схеме на Фигуре 4, каждый электрический исполнительный механизм 31a, 31b, 31c, 31d электрически соединен со шкафом 42 управления с помощью отсоединителей 20a–20d.
Более того, каждый маневрирующий электрический исполнительный механизм 11, 12, 13 содержит тормоз. Эти тормоза 17a–17e обеспечивают возможность фиксации положения соответствующего исполнительного механизма, когда он не используется, во время манипулирования загрузочного рукава.
Тормоза 17a–17e также служат в качестве стояночного тормоза для фиксации рукава в положении покоя. Тормоза, таким образом, обеспечивают возможность обеспечения безопасности для оборудования или людей, расположенных вокруг загрузочного рукава.
Все электрические исполнительные механизмы 11, 12, 13,14, 31a, 31b, 31c, 31d электрически соединены и также соединены полевой шиной типа EtherCAT со шкафом 43 управления. Каждый электрический исполнительный механизм 11, 12, 13, 14, 31a, 31b, 31c, 31d, более того, связан с конкретными средствами 18a–18j управления. Средства 18a–18j управления содержат электрическое оборудование, необходимое для управления электрическими исполнительными механизмами, такое как приводы и фильтры.
Средства управления 18f–18j соединены с электропитанием 45 с помощью изолирующего трансформатора 46, описанного подробно позже.
В варианте осуществления на Фигуре 4 шкаф 42 управления содержит средства управления для управления кодерами 16a–16j. Подобно средствам управления, упомянутым ранее, эти средства расположены в зоне безопасности.
Для управления кодерами 16a–16j шкаф 43 управления расположен непосредственно в рабочей зоне, но служит только в качестве переключателя. В целях надежности передачи сигналов шкаф 43 управления не может быть размещен в безопасной области. Однако, API 44 расположена в безопасной области. Таким образом, пространство, занимаемое в безопасной области, уменьшается, и условия герметизации электрических компонентов менее важны.
Возможны разные режимы работы механической конструкции, в частности, режим приведения в движение, неподвижный режим и режим свободного хода.
В режиме приведения в движение перемещения механической конструкции обеспечиваются электрическими исполнительными механизмами 11, 12, 13,14, 31a, 31b, 31c, 31d. Режим приведения в движение используется во время соединения, отсоединения и обслуживания.
В неподвижном режиме маневрирующие электрические исполнительные механизмы 11, 12, 13 зафиксированы с помощью механического тормоза 17a–17d, интегрированного в исполнительный механизм.
В режиме свободного хода механическая конструкция после соединения повторяет перемещения судна 3 во время загрузки и разгрузки. В связи с этим для режима свободного хода маневрирующие электрические исполнительные механизмы 11, 12, 13 повторяют перемещения, которые им навязаны, при этом минимизируя противодействующие крутящие моменты и/или противодействующие силы посредством реверсивных редукторов. В этом режиме свободного хода загрузочный рукав непосредственно прикладывает крутящий момент к приводному валу каждого исполнительного механизма, заставляя его поворачиваться в направлении вращения, обратном направлению, которое наблюдается во время фазы соединения.
Этот режим свободного хода также может применяться в режиме аварийного разъединения. Тормоза должны быть разжаты в случае этого режима свободного хода.
Режим свободного хода, в частности, также обеспечивает возможность внедрения принципа регенерации энергии. Фигура 5 иллюстрирует электрическую схему принципа регенерации энергии, в котором электрические двигатели исполнительных механизмов 11, 12, 13 могут быть преобразованы в генераторы тока с этой целью.
Фигура 5 представляет разные возможности электропитания электрических исполнительных механизмов 11, 12, 13,14, 31a, 31b, 31c, 31d.
В режиме приведения в движение электропитание может быть обеспечено либо основным источником 52, либо аварийным источником 45 питания.
Когда работает электропитание от аварийного источника 45 питания, переключатели Kb и Kl замкнуты, а переключатель Ks разомкнут.
Когда питание от аварийного источника 45 питания не работает, переключатели Kl и Ks замкнуты, а переключатель Kb разомкнут. Другими словами, питание обеспечивается основным источником 52 электропитания.
Когда аварийный источник 45 питания регенерирует электроэнергию от маневрирующих электрических исполнительных механизмов 11, 12, 13, переключатели Kl и Ks разомкнуты, а переключатель Kb замкнут.
В качестве варианта, генерируемый ток также может быть подан обратно в основной источник 52 электропитания при условии, что выполняются операции преобразования электричества, требуемые в области электричества.
Когда используемый двигатель представляет собой бесщеточный двигатель, регенерация энергии возможна в режиме свободного хода или аварийного разъединения, тогда как когда двигатель представляет собой асинхронный двигатель, регенерация энергии возможна только в режиме аварийного разъединения. На самом деле в режиме свободного хода исполнительные механизмы не питаются.
На практике один или другой из этих двигателей работает с возможностью генерации тока согласно традиционным принципам.
Поскольку редуктор скорости является реверсивным, каждое не приведенное в действие перемещение механической конструкции позволяет генерировать электрический ток и питать устройство регенерации энергии посредством вращения верхнего приводного вала с синхронной скоростью.
В более общем смысле дополнительно следует отметить следующие моменты относительно объекта вариантов осуществления, описанных выше, и их возможных вариантов. Система перекачки текучей среды, описанная со ссылкой на чертежи, представляет собой шарнирный рукав, чья внутренняя и внешняя трубы являются самоподдерживающимися. В качестве варианта, они могут поддерживаться опорной конструкцией. В более общих чертах она может представлять собой тип системы перекачки текучей среды такого же вида, как и те, которые описаны в патентных заявках, упомянутых выше.
В случае вариантов осуществления, описанных выше, реверсивный редуктор сцеплен с зубчатым колесом, вращательно соединенным с линией перекачки, или соединен с приводной системой последней. Он, конкретнее, прикреплен к поворотному шарниру из нескольких изгибов и поворотных шарниров, обычно соединяющих два сегмента трубы линии перекачки, или к системе пантографа, служащей для вращательного приведения в движение секции трубы линии перекачки. Когда реализована опорная конструкция, зубчатое колесо может, разумеется, быть соединено с этой опорной конструкцией.
Реверсивный редуктор, описанный выше со ссылкой на чертежи, представляет собой редуктор с блоком шестерен эпициклической передачи. В качестве варианта, он может представлять собой редуктор с параллельными валами или редуктор с перпендикулярными валами при условии, что они являются реверсивными. В качестве варианта, реверсивный редуктор также может быть соединен с линией перекачки или с ее опорной конструкцией с помощью цепи, зубчатого ремня или системы передачи перемещения, содержащей по меньшей мере один шкив, трос, намотанный на последний или эти последние, и по меньшей мере один реверсивный линейный исполнительный механизм, связанный с тросом и сцепленный с одним из исполнительных механизмов с реверсивным редуктором. Шкив может, например, представлять собой шкив системы пантографа со шкивами и тросом, описанной со ссылкой на чертежи, в случае чего зубчатое колесо, соединенное со шкивом, будет заменено на такую систему передачи.
Под реверсивным линейным исполнительным механизмом здесь подразумевается негидравлический или неэлектрический исполнительный механизм. На практике исполнительный механизм с реверсивным редуктором образует электрический подъемник. Линейный исполнительный механизм по существу может представлять собой, например, шариковый или роликовый винтовой подъемник.
Двигатель и редуктор также могут принимать форму редукторного двигателя. Более того, электрический двигатель может быть синхронным или асинхронным.
В случае вариантов осуществления, описанных выше со ссылкой на чертежи, средства торможения принимают форму механического тормоза, интегрированного в исполнительный механизм. В качестве варианта, эти тормозные средства могут, например, быть выполнены с возможностью выполнения торможения посредством самого двигателя и обратной связи по положению.
Соединительная система, описанная выше, содержит соединительную муфту, шарнирно соединенную с концом линии перекачки с тремя степенями свободы вращения посредством применяемых поворотных шарниров. В возможном случае по меньшей мере одна из трех степеней свободы вращения может управляться электрическим исполнительным механизмом. На практике, начиная с линии перекачки, это вторая из трех степеней свободы вращения.
В общем, соединительная муфта может представлять собой соединительную муфту с ручным или электрическим зажимом на целевом трубопроводе и содержит, в случае электрического зажима, по меньшей мере один электрический исполнительный механизм, выполненный с возможностью приведения в движение приводной системы одной или более зажимных губок соединительной муфты.
Как обозначено выше, соединительная система оборудована системой аварийного разъединения, содержащей два клапана, которые расположены рядом с использованием тарелки, чье отверстие управляется по меньшей мере одним электрическим исполнительным механизмом, причем указанный по меньшей мере один электрический исполнительный механизм также управляет по меньшей мере закрытием клапанов. На практике это управление может, например, быть получено посредством перемещения при перемещении стержня, такого как описанный, например, в заявке на патент WO2007/017559.
Как также описано выше, электрический исполнительный механизм или исполнительные механизмы соединительной системы предпочтительно соединены с источником подачи электроэнергии с помощью изолирующего трансформатора. В качестве варианта, этот электрический исполнительный механизм или эти электрические исполнительные механизмы могут иметь электрические изолирующие элементы между валом двигателя и редуктором скорости и на двигателе. Более того, соединительная система предпочтительно содержит, в дополнение к вышеупомянутым средствам, электрически изолирующий барьер механической природы на ее поворотном шарнире. На практике, он представляет собой второй шарнир из трех, которые упоминаются выше.
Определенное число датчиков и средств измерения были описаны выше со ссылкой на чертежи. В более общем смысле, могут быть реализованы следующие положения.
– электрические исполнительные механизмы для управления перемещением линии перекачки могут быть оборудованы датчиками, выполненными с возможностью определения конфигурации линии перекачки; и/или
– каждый электрический исполнительный механизм соединительной муфты с электрическим зажимом может быть обеспечен средствами изменения, выполненными с возможностью получения сведений о положении узла, образованного зажимной губкой и ее приводной системой; и/или
– система перекачки содержит несколько электрических исполнительных механизмов соединительной муфты и привод связан с каждым электрическим исполнительным механизмом соединительной муфты и содержит средства измерения тока, потребляемого исполнительным механизмом, так, чтобы иметь способность обеспечивать, на основе информации о потреблении тока, идентичный зажим на каждой из связанных губок и обеспечивать возможность непроницаемого для текучей среды соединения соединительной муфты с целевым трубопроводом, причем для привода также возможно содержать средства измерения, позволяющие ему знать, находится ли соединительная муфта в зажатом положении на целевом трубопроводе или нет, адаптацию скорости и/или крутящего момента узла, образованного зажимной губкой и ее приводной системой согласно ее положению, или привод также может содержать средства, обеспечивающие возможность адаптации скорости и/или крутящего момента электрического исполнительного механизма, связанного с системой аварийного разъединения, согласно положению клапанов этой системы; и/или
– электрический исполнительный механизм системы аварийного разъединения может быть обеспечен средствами измерения, выполненными с возможностью получения сведений о положении клапанов системы аварийного разъединения.
Средства измерения, обеспеченные на исполнительных механизмах, представляют собой предпочтительно кодеры. Эти датчики и/или средства измерения оказываются особенно полезными в контексте процедуры соединения, которая является автоматической или полуавтоматической (оператор принимает участие в процедуре соединения). В контексте ручного соединения, в дальнейшем возможно, в частности, обеспечивать датчики, такие как инклинометры, для того, чтобы иметь информацию в виде обратной связи об объекте конфигурации линии перекачки.
В случае вариантов осуществления, описанных со ссылкой на чертежи, электрический двигатель одного или более электрических исполнительных механизмов для управления перемещением линии перекачки в пространстве представляет собой двигатель, чья работа способна преобразовываться в режим генератора тока, когда приводной крутящий момент непосредственно прикладывается к приводному валу соответствующего электрического исполнительного механизма или исполнительных механизмов.
В качестве варианта, приводной вал одного или более электрических исполнительных механизмов для управления перемещением линии перекачки в пространстве может быть связан с генератором тока для производства электричества из приводного крутящего момента, прикладываемого непосредственно к нему.
Таким образом, в общем, один или более электрических исполнительных механизмов для управления перемещением линии перекачки в пространстве может быть связан со средствами генерации тока для производства электричества.
Генерируемый ток может быть регенерирован в аккумуляторной батарее или в реверсивном аварийном источнике питания или может даже подаваться обратно в цепь или находить потребителя для него, такого как сопротивление торможению.
Также в более общем смысле и согласно положению, которое является по существу первоначальным, система перекачки может содержать первое средство управления электрических исполнительных механизмов, связанное с линией перекачки, расположенное на расстоянии от этой линии перекачки, и второе средство управления одного или более средств измерения, связанное с электрическими исполнительными механизмами, причем второе средство управления установлено во взрывоустойчивом корпусе вблизи линии перекачки.
Эти положения были описаны выше для особого варианта осуществления на Фигуре 4. Следует отметить в связи с этим, что они могут быть реализованы без необходимости реализации конкретных электрических исполнительных механизмов, таких как описанные выше, но могут быть реализованы с традиционными электрическими исполнительными механизмами.
Более того, средства измерения, определенные выше, могут в таком случае также быть заменены на один или несколько средств измерения любого типа, которые обычно связаны с электрическими исполнительными механизмами.
Многочисленные другие варианты возможны согласно обстоятельствам и в связи с этим следует отметить, что изобретение не ограничено представленными и описанными примерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ | 2013 |
|
RU2582507C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ СОЕДИНЕНИЕ | 2018 |
|
RU2765853C2 |
| ПРИВОДНОЙ РЕМЕНЬ И СПОСОБ СБОРКИ ПРИВОДНОГО РЕМНЯ | 2007 |
|
RU2413105C2 |
| ПРИВОДНОЙ РЕМЕНЬ И СПОСОБ СБОРКИ ПРИВОДНОГО РЕМНЯ | 2007 |
|
RU2408807C2 |
| БЛОК ПРОТИВОВЫБРОСОВЫХ ПРЕВЕНТОРОВ И СИСТЕМА ПИТАНИЯ | 2014 |
|
RU2663845C2 |
| УСТАНОВКА НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2015 |
|
RU2651613C1 |
| МРТ С УЧАСТИЕМ РАСПРЕДЕЛЕННОГО ДАТЧИКА ДЛЯ КОНТРОЛЯ ТЕМПЕРАТУРЫ И/ИЛИ ДЕФОРМАЦИИ КАБЕЛЕЙ КАТУШКИ И ФИЛЬТРОВ | 2013 |
|
RU2637398C2 |
| ПРЕДОХРАНИТЕЛЬНЫЙ РАЗЪЕДИНИТЕЛЬ | 2018 |
|
RU2773582C2 |
| МАНЖЕТА СФИГМОМАНОМЕТРА И СФИГМОМАНОМЕТР С ТАКОЙ МАНЖЕТОЙ | 2009 |
|
RU2455927C2 |
| Приводная муфта аварийного разъединения (ПМАР) | 2020 |
|
RU2782230C1 |

Группа изобретений относится к системам перекачки текучей среды, и конкретнее к морским загрузочным система. Технический результат – обеспечение компактности привода. Система для перекачки текучей среды из положения хранения в целевой трубопровод или из указанного целевого трубопровода в положение хранения содержит трубчатую линию перекачки текучей среды, которая содержит на одном из ее концов соединительную систему, выполненную с возможностью соединения с целевым трубопроводом для перекачки текучей среды, и электрические исполнительные механизмы для управления перемещением линии перекачки в пространстве, каждый с помощью приводного вала. Каждый из исполнительных механизмов для управления перемещением линии перекачки содержит электрический двигатель с выходным валом, редуктор скорости, приводной вал, вращательно приводимый в движение выходным валом двигателя посредством редуктора скорости, который является реверсивным, так, чтобы позволять приводному валу поворачиваться, когда приводной крутящий момент непосредственно прикладывается к нему, и средства торможения для запирания исполнительного механизма в положении, когда управление перемещением находится в процессе, и указанный исполнительный механизм не активируется для указанного управления. 2 н. и 18 з.п. ф-лы, 8 ил.
1. Система (10) для перекачки текучей среды из положения хранения в целевой трубопровод (33) или из указанного целевого трубопровода (33) в положение хранения, содержащая трубчатую линию (22, 23) перекачки текучей среды, содержащую на одном из ее концов соединительную систему (32), выполненную с возможностью соединения с целевым трубопроводом (33) для перекачки текучей среды, и электрические исполнительные механизмы для управления перемещением линии перекачки в пространстве, каждый с помощью приводного вала (205), отличающаяся тем, что каждый из исполнительных механизмов (11–13, 200) для управления перемещением линии перекачки содержит электрический двигатель (201) с выходным валом, редуктор (202) скорости, приводной вал, вращательно приводимый в движение выходным валом двигателя посредством редуктора (202) скорости, который является реверсивным, так, чтобы позволять приводному валу (205) поворачиваться, когда приводной крутящий момент непосредственно прикладывается к нему, и средства (17а–17e) торможения для запирания исполнительного механизма (11–13, 200) в положении, когда управление перемещением находится в процессе, и указанный исполнительный механизм (11–13, 200) не активируется для указанного управления.
2. Система по п. 1, отличающаяся тем, что реверсивный редуктор (202) представляет собой редуктор с блоком шестерен эпициклической передачи, редуктор с параллельными валами или редуктор с перпендикулярными валами.
3. Система по любому из пп. 1 или 2, отличающаяся тем, что реверсивный редуктор сцеплен с зубчатым колесом (204), вращательно связанным с линией перекачки, или соединен с ее опорной конструкцией или с системой, приводящей в движение линию перекачки.
4. Система по п. 3, отличающаяся тем, что зубчатое колесо (204) прикреплено к поворотному шарниру из нескольких изгибов, причем этот шарнир соединяет две секции трубы линии перекачки, или к системе пантографа, служащей для вращательного приведения в движение секции трубы линии перекачки.
5. Система по любому из пп. 1–4, отличающаяся тем, что реверсивный редуктор соединен с линией перекачки или с ее опорной конструкцией с помощью цепи, зубчатого ремня или системы (15) передачи перемещения, содержащей по меньшей мере один шкив, трос, намотанный на последний или эти последние, и по меньшей мере один реверсивный линейный исполнительный механизм, связанный с тросом и сцепленный с одним из исполнительных механизмов с реверсивным редуктором.
6. Система по любому из пп. 1–5, отличающаяся тем, что средства (17а–17e) торможения способны обеспечивать торможение посредством механического тормоза, интегрированного в исполнительный механизм, или посредством двигателя и обратной связи по положению.
7. Система по любому из пп. 1–6, отличающаяся тем, что соединительная система содержит соединительную муфту (31), шарнирно присоединенную на конце линии перекачки с тремя степенями свободы вращения, и по возможности по меньшей мере одна из трех степеней свободы вращения управляется электрическим исполнительным механизмом.
8. Система по п. 7, отличающаяся тем, что соединительная муфта (31) представляет собой соединительную муфту с ручным или электрическим зажимом на целевом трубопроводе и содержит, в случае электрического зажима, по меньшей мере один электрический исполнительный механизм, выполненный с возможностью приведения в движение приводной системы одной или более зажимных губок соединительной муфты.
9. Система по любому из пп. 1–8, отличающаяся тем, что соединительная система оборудована системой (14’) аварийного разъединения, содержащей два клапана, которые расположены рядом с использованием тарелки, чье отверстие управляется по меньшей мере одним электрическим исполнительным механизмом, причем указанный по меньшей мере один электрический исполнительный механизм также управляет по меньшей мере закрытием клапанов.
10. Система по любому из пп. 1–9, отличающаяся тем, что электрический исполнительный механизм или исполнительные механизмы соединительной системы соединены с источником электроэнергии (52) с помощью изолирующего трансформатора (46) или имеют электрически изолирующие элементы между валом двигателя и редуктором скорости и на двигателе, и соединительная система содержит электрически изолирующий барьер механической природы на одном из поворотных шарниров последней.
11. Система по любому из пп. 1–10, отличающаяся тем, что электрические исполнительные механизмы для управления перемещением линии перекачки оборудованы датчиками (16а–16e), выполненными с возможностью определения конфигурации линии перекачки.
12. Система по любому из пп. 1–11, отличающаяся тем, что каждый электрический исполнительный механизм (31a–31d) соединительной муфты с электрическим зажимом обеспечен средствами (16f–16i) измерения, выполненными с возможностью получения сведений о положении узла, образованного зажимной губкой и ее приводной системой.
13. Система по любому из пп. 1–12, отличающаяся тем, что система перекачки содержит несколько электрических исполнительных механизмов (31a–31d) соединительной муфты и привод, связанный с каждым электрическим исполнительным механизмом соединительной муфты, и содержит (i) средства измерения тока, потребляемого исполнительным механизмом, так, чтобы иметь способность обеспечивать, на основе информации о потреблении тока, идентичный зажим на каждой из связанных губок и обеспечивать возможность непроницаемого для текучей среды соединения соединительной муфты с целевым трубопроводом, (ii) средства измерения, обеспечивающие возможность определения, находится ли соединительная муфта в зажатом положении на целевом трубопроводе или нет, (iii) средства измерения, обеспечивающие возможность адаптации скорости и/или крутящего момента узла, образованного зажимной губкой и ее приводной системой, согласно ее положению, или (iv) средства измерения, обеспечивающие возможность адаптации скорости и/или крутящего момента электрического исполнительного механизма, связанного с системой аварийного разъединения, согласно положению клапанов этой системы.
14. Система по п. 9, отличающаяся тем, что электрический исполнительный механизм (14) системы (14’) аварийного разъединения обеспечен средством (16j) измерения, выполненным с возможностью получения сведений о положении клапанов системы аварийного разъединения.
15. Система по любому из пп. 1–14, отличающаяся тем, что один или более электрических исполнительных механизмов (11–13, 200) для управления перемещением линии перекачки в пространстве связан со средствами генерации тока для производства электричества.
16. Система по п. 15, отличающаяся тем, что приводной вал одного или более электрических исполнительных механизмов (11–13, 200) для управления перемещением линии перекачки в пространстве связан с генератором тока для производства электричества из приводного крутящего момента, прикладываемого непосредственно к нему.
17. Система по п. 15, отличающаяся тем, что электрический двигатель одного или более электрических исполнительных механизмов (11–13, 200) для управления перемещением линии перекачки в пространстве представляет собой двигатель, чья работа способна преобразовываться в режим генератора тока, когда приводной крутящий момент непосредственно прикладывается к приводному валу соответствующего электрического исполнительного механизма или исполнительных механизмов.
18. Система по любому из пп. 1–17, отличающаяся тем, что система перекачки содержит по меньшей мере одну систему (16a–16j) измерения, способную записывать заранее определенные параметры линии (22, 23) перекачки, и электрические исполнительные механизмы (11–13, 200) для управления перемещением линии перекачки в пространстве и/или электрический исполнительный механизм или исполнительные механизмы (31a–31d), связанные с соединительной системой, и средства (44) управления, связанные с системой или системами измерения, которые способны обнаруживать возможные неисправности с целью выполнения работы по обслуживанию или профилактическому обслуживанию.
19. Система по любому из пп. 11–14, отличающаяся тем, что система перекачки содержит первое средство (44) управления электрических исполнительных механизмов, связанное с линией перекачки, расположенное на расстоянии от этой линии перекачки, и второе средство (43) управления одного или более средств измерения, связанное с электрическими исполнительными механизмами, причем второе средство управления установлено во взрывоустойчивом корпусе вблизи линии перекачки.
20. Шарнирный рукав для перекачки текучей среды, содержащий систему перекачки по любому из предыдущих пунктов, причем система перекачки содержит шарнирный трубопровод (22, 23), смонтированный на опоре, имеющий три степени свободы вращения в пространстве относительно опоры, причем перемещения в каждой из степеней свободы управляются по меньшей мере одним из электрических исполнительных механизмов для управления перемещением линии перекачки в пространстве.
| WO 2009141675 A1, 26.11.2009 | |||
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ ЗАГРУЗКИ И/ИЛИ ВЫГРУЗКИ ТЕКУЧИХ СРЕД | 2008 |
|
RU2472696C2 |
| УСТРОЙСТВО С ПРЯМЫМ УПРАВЛЕНИЕМ, В ЧАСТНОСТИ С ПРОПОРЦИОНАЛЬНЫМ И/ИЛИ ЛИНЕЙНЫМ УПРАВЛЕНИЕМ, ДЛЯ СИСТЕМЫ ПОГРУЗКИ И/ИЛИ РАЗГРУЗКИ ЖИДКОСТИ | 2008 |
|
RU2488547C2 |
| US 4408943 A1, 11.10.1983 | |||
| ПРОТЕЗ СУСТАВА ПАЛЬЦА | 2011 |
|
RU2543624C2 |
| JP 2004155471 A, 03.06.2004. | |||

