Настоящее изобретение относится в целом к системам для загрузки и/или выгрузки текучих сред для судов, обычно называемым морскими системами загрузки. Данные системы используются для перекачки текучего продукта между судном и причалом или между двумя судами.
Понимается, что текучий продукт означает жидкий или газообразный продукт.
В частности, настоящее изобретение относится к устройствам для управления перемещением, позиционированием и соединением подобных систем загрузки и/или выгрузки.
Обычно морские загрузочные системы имеют конец трубопровода для перекачки текучих сред, который прикреплен к основанию и соединен с резервуаром для текучей среды, подлежащей перекачке, и противоположный конец трубопровода, который является подвижным и снабжен муфтой, выполненной с возможностью присоединения к целевой трубе, которая сама присоединена к резервуару для текучей среды.
Известны две группы систем для загрузки текучих сред, которые различаются своей конструкцией: системы для перекачки посредством жестких труб и системы для перекачки посредством гибких труб.
В группе систем для перекачки посредством жестких труб можно различить системы с загрузочными рукавами и пантографные системы.
Загрузочный рукав представляет собой шарнирно-сочлененную конструкцию с системами труб, содержащую основание, соединенное с резервуаром для текучей среды, на котором первая труба, названная внутренней трубой, закреплена посредством части трубы с 90-градусным коленом, обеспечивающей возможность поворота одного из ее концов вокруг вертикальной оси и поворота другого конца вокруг горизонтальной оси. На противоположном конце внутренней трубы вторая труба, названная наружной трубой, закреплена с возможностью поворота вокруг горизонтальной оси. Муфта установлена на конце наружной трубы. Регулирование каждого из трех поворотов осуществляется посредством силового гидроцилиндра или гидравлического двигателя.
Пантографные системы подобно загрузочным рукавам содержат основание, соединенное с резервуаром. Кран установлен на данном основании с возможностью поворота. Кран имеет стрелу, несущую трубу для текучей среды. На конце стрелы смонтирован пантограф, состоящий из шарнирно соединенных труб для текучей среды и обеспечивающий возможность перемещения муфты, которая установлена на свободном конце пантографа. Наклон пантографа регулируется посредством поворота на конце стрелы. Перемещение пантографа регулируется посредством гидравлических двигателей и посредством силового гидроцилиндра для поворота на основании.
Наконец, системы с гибкими трубопроводами обычно содержат трубопровод, по которому перекачивается текучий продукт, и механическую систему, обеспечивающую возможность манипулирования трубопроводом. Существует несколько типов систем манипулирования, но во всех случаях они включают в себя манипулирующий кран или конструкцию, которая обеспечивает опору для муфты, предназначенной для соединения гибких трубопроводов.
Обычно загрузочная система содержит приводной механизм на ее конце, обеспечивающий возможность фиксации или расфиксации муфты. Обычно этот приводной механизм представляет собой один или несколько силовых гидроцилиндров или один или несколько гидравлических двигателей.
На практике в большинстве систем муфта шарнирно соединена на ее конце с тремя степенями свободы поворота. Таким образом, угловая ориентация плоскости муфты относительно плоскости целевой трубы возможна независимо от наклона рукава, плоскость муфты остается параллельной к плоскости целевой трубы при приближении для соединения, и затем, как только муфта будет зафиксирована на целевой трубе, данные шарнирные соединения обеспечивают возможность «плавающего» движения узла. На практике оператор регулирует повороты посредством гидравлических двигателей или силовых гидроцилиндров до тех пор, пока не будет обеспечено соединение муфты с целевой трубой. Как только муфта будет зафиксирована, гидравлические двигатели или силовые гидроцилиндры выключаются или «устанавливаются в режиме свободного хода» для обеспечения возможности повторения загрузочной системой движений целевой трубы без деформирования муфты.
Две группы загрузочных устройств, описанные выше, имеют конструктивные различия, но их системы управления выполнены в соответствии с одинаковым общим принципом работы. Следует отметить, что во всех случаях муфта имеет, по меньшей мере, три степени свободы относительно основания, несущего зафиксированный конец трубы, и что движения в рамках каждой из данных степеней свободы независимо регулируются приводными механизмами. Оператор имеет командный интерфейс, позволяющий ему управлять перемещением муфты.
Управление каждым приводным механизмом осуществляется или по отдельности посредством независимого управления типа двухпозиционного управления, или посредством одновременного пропорционального управления.
В случае устройств двухпозиционного независимого управления оператор может воздействовать независимо на каждое из устройств управления для управления определенным элементом загрузочной системы. Комбинированное воздействие на группу приводных механизмов обеспечивает возможность установки муфты в заданном месте в пространстве.
В случае устройств пропорционального управления оператор имеет командный входной интерфейс, содержащий устройство пропорционального управления, взаимодействующее с вычислительным устройством так, что воздействие на указанное устройство пропорционального управления с большей или меньшей величиной приводит к, по меньшей мере, одной команде пропорционального управления, которая обеспечивает воздействие соответственно большей или меньшей величины для соответствующих приводных механизмов, в результате чего муфта будет перемещаться со скоростью движения, которая будет соответственно больше или меньше.
Таким образом, оператор может непосредственно управлять перемещением муфты и, следовательно, может обеспечить перемещение муфты, которое является прямолинейным и/или осуществляется с постоянной скоростью, поскольку вычислительное устройство формирует движение муфты посредством одновременного воздействия на все приводные механизмы.
Обычно используемые приводные механизмы являются гидравлическими, например, представляют собой гидравлический двигатель или силовой гидроцилиндр, хотя также известно применение электрических приводных механизмов, например электрических двигателей или пневматических приводных механизмов. Управление приводными механизмами, которыми оснащены морские загрузочные системы, осуществляется или посредством двухпозиционного управления с постоянной скоростью перемещения и в определенных случаях с возможностью задания двух скоростей перемещения по желанию для устройств независимого управления двухпозиционного типа, или посредством пропорциональных распределителей в случае устройств пропорционального управления.
Во всех случаях присоединение муфты к целевой трубе выполняется вручную, так что оператор манипулирует загрузочной системой посредством или без помощи управляющего вычислительного устройства для обеспечения соединения муфты с целевой трубой.
Данные управляющие устройства трудно использовать вследствие того, что оператор должен превосходно знать функционирование и кинематику морской загрузочной системы. Кроме того, он должен компенсировать перемещения судна, в частности, в случае волнения на море. Это увеличивает риск столкновения муфты с препятствиями или с целевой трубой, что может привести к повреждению уплотнений муфты. Таким образом, манипулирование и присоединение требуют квалифицированного персонала.
Известна система, обеспечивающая возможность облегчения соединения муфты с целевой трубой, в которой муфту заранее соединяют посредством троса с целевой трубой. Трос перебрасывают между причалом или судном, несущим основание, и судном, несущим целевую трубу, и затем закрепляют посредством операторов между целевой трубой и основанием. В этом случае лебедка обеспечивает возможность перемещения рукава вперед вдоль натянутого троса и, следовательно, перемещения муфты по направлению к целевой трубе. Данную систему обычно называют «системой нацеливания». Она представляет собой полуавтоматическую систему: после присоединения троса оператор должен регулировать перемещение муфты вдоль троса посредством выполнения операции намотки. Для конечной фазы приближения предусмотрен направляющий конус. Как только муфта будет приближена, оператор должен будет завершить ее присоединение и ее замыкание вручную.
Данный способ полуавтоматического соединения требует квалифицированного персонала и соответствующей тяжелой механической конструкции (в частности, двигателя, выполненного с возможностью перемещении рукава под действием тягового усилия вдоль троса, места крепления для противоположного конца троса и направляющего конуса для приближения на конечной стадии).
Исходя из данных наблюдений, в качестве цели изобретения определена разработка устройства для облегчения операции управления перемещением муфты для оператора, в частности для обеспечения возможности успешного выполнения присоединения муфты при неблагоприятном состоянии моря, и в более общем случае для облегчения соединения и выполнения его быстрее во всех случаях при одновременном снижении риска столкновения муфты.
Для этого в соответствии с изобретением разработано устройство управления перемещением и позиционированием муфты для морской загрузочной системы, при этом морская загрузочная система содержит, по меньшей мере, один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию, и подвижный конец трубопровода, снабженный муфтой, выполненной с возможностью присоединения к целевой трубе, при этом муфта имеет, по меньшей мере, три степени свободы относительно основания, при этом устройство характеризуется тем, что оно содержит, по меньшей мере, три приводных механизма, каждый из которых предназначен для управления перемещением системы с одной степенью свободы, и, по меньшей мере, один элемент из группы, состоящей из муфты и целевой трубы, или элемент, расположенный непосредственно рядом с одним, по меньшей мере, из элементов группы, состоящей из муфты и целевой трубы, содержит, по меньшей мере, одно средство для предоставления информации о положении муфты, и, кроме того, устройство содержит вычислительные средства, выполненные с возможностью:
вычисления относительного положения муфты непосредственно относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные движения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе,
подачи управляющих команд для приближения муфты к целевой трубе,
повторения трех предшествующих операций до тех пор, пока муфта не окажется размещенной перед целевой трубой в заданном положении для присоединения.
Под элементами, расположенными непосредственно рядом, понимаются элементы морской загрузочной системы, которые являются неподвижными или подвижными соответственно относительно муфты или целевой трубы, но находятся достаточно близко к ним, какой бы ни была геометрическая конфигурация загрузочной системы, для выдачи точной информации об относительном положении муфты относительно целевой трубы, в частности для обеспечения возможности точного автоматического размещения муфты перед целевой трубой для присоединения.
Предпочтительно устройство согласно изобретению позволяет оператору обходиться без управления перемещением муфты во время приближения к целевой трубе для присоединения, поскольку устройство выполняет задачу управления перемещением муфты автоматически до тех пор, пока муфта не окажется размещенной перед целевой трубой.
Другими словами, устройство согласно изобретению обеспечивает возможность автоматического перемещения муфты до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения. Оператору больше не нужно управлять перемещением муфты для присоединения ее к целевой трубе, поскольку перемещение муфты в заданное положение для присоединения осуществляется автоматически.
Это предпочтительно обеспечивает возможность облегчения присоединения и выполнения его быстрее во всех случаях, и, более точно, успешного выполнения присоединения муфты при неблагоприятном состоянии моря при одновременном снижении риска удара муфты.
При использовании устройства согласно изобретению соединение может выполнить даже неопытный оператор.
Устройство согласно изобретению обеспечивает возможность повышения безопасности использования за счет устранения какого-либо риска неправильного манипулирования.
Изобретение предпочтительно адаптировано к любому типу морской загрузочной системы, к системам для перекачки посредством жестких труб, а также к системам для перекачки посредством гибких труб, поскольку средства для предоставления информации о положении муфты обеспечивают возможность получения информации об относительном положении муфты непосредственно относительно целевой трубы независимо от кинематики и конструкции загрузочной системы.
В соответствии с предпочтительными признаками, которые могут быть скомбинированы:
по меньшей мере, один элемент из группы, состоящей из муфты и целевой трубы, или элемент, который зафиксирован относительно, по меньшей мере, одного из элементов из группы, состоящей из муфты и целевой трубы, содержит, по меньшей мере, одно средство для предоставления информации о положении целевой трубы, и вычислительные средства выполнены с возможностью определения относительного положения муфты относительно целевой трубы на основе информации о положении трубы и информации о положении муфты, предоставленной, по меньшей мере, двумя средствами, предназначенными для предоставления информации о положении;
средство для предоставления информации о положении муфты и средство для предоставления информации о положении целевой трубы выполнены с возможностью коммуникации друг с другом и содержат вычислительные средства для вычисления и непосредственно предоставления информации об относительном положении муфты относительно целевой трубы;
муфта шарнирно присоединена на ее конце с тремя степенями свободы поворота, и, по меньшей мере, один из трех поворотов регулируется приводным механизмом, при этом устройство предусмотрено со средствами для предоставления информации об угловой ориентации муфты и средствами для предоставления информации об угловой ориентации целевой трубы, причем вычислительные средства выполнены с возможностью вычисления - на основе информации, предоставленной средствами, предназначенными для предоставления информации об угловой ориентации, - параметров, определяющих управляющие команды, подлежащие выдаче, по меньшей мере, одному приводному механизму, чтобы угловая ориентация муфты в заданном положении для присоединения была по существу такой же, как угловая ориентация целевой трубы.
Предпочтительно муфта ориентирована вдоль той же оси, что и целевая труба, что обеспечивает возможность точного и надежного соединения при одновременном ограничении риска столкновения и повреждения уплотнений.
В соответствии с предпочтительными признаками изобретения, которые могут быть скомбинированы:
устройство дополнительно содержит приводной механизм, обеспечивающий возможность фиксации и расфиксации муфты, и, как только муфта окажется размещенной перед целевой трубой в заданном положении для присоединения, вычислительные средства подают управляющую команду указанному приводному механизму на фиксацию муфты на целевой трубе;
как только муфта будет присоединена и зафиксирована на целевой трубе, вычислительные средства подают команду на выключение приводных механизмов для управления перемещением системы с ее степенями свободы для того, чтобы сделать перемещения системы свободными.
Таким образом, соединение предпочтительно выполняется без вмешательства человека даже в том случае, если целевая труба перемещается, например, при волнении на море. Фиксация муфты выполняется автоматически, как только она окажется размещенной в заданном положении для присоединения. После этого обеспечивается возможность свободного перемещения приводных механизмов загрузочной системы для того, чтобы муфта и загрузочная система могли «следовать» за перемещениями целевой трубы без повреждения загрузочной системы.
В соответствии с предпочтительными признаками, которые могут быть скомбинированы:
средство для предоставления информации о положении целевой трубы включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения целевой трубы, при этом вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно целевой трубы на основе информации об абсолютном положении целевой трубы;
средство для предоставления информации о положении муфты включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения муфты, при этом вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно целевой трубы на основе информации об абсолютном положении муфты и целевой трубы;
устройства для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), представляют собой устройства, предназначенные для коммуникации друг с другом, и содержат вычислительные средства, предназначенные для вычисления и непосредственного предоставления информации об относительном положении муфты относительно целевой трубы;
одно из средств для предоставления информации о положении муфты или целевой трубы включает в себя оптическое устройство, выполненное с возможностью взаимодействия соответственно с целевой трубой или муфтой или с мишенью, которая зафиксирована соответственно относительно целевой трубы или относительно муфты, посредством излучения светового луча, такого как лазерный луч, по направлению к целевой трубе или к муфте, или к мишени, которая зафиксирована соответственно относительно целевой трубы или муфты, и обнаружения отраженного луча и измерения времени прохождения луча для получения, исходя из этого, информации об относительном положении муфты непосредственно относительно целевой трубы;
средство для предоставления информации о положении муфты включает в себя оптическую камеру, выполненную и установленную с возможностью выдачи изображения муфты вычислительным средствам, при этом вычислительные средства выполнены с возможностью обработки изображения, выданного камерой, для вычисления относительного положения муфты относительно целевой трубы;
по меньшей мере, один шнур натянут посредством использования бобины между муфтой и целевой трубой, и средства для предоставления информации о положении представляют собой, по меньшей мере, один датчик угла и/или, по меньшей мере, один датчик длины размотанного шнура на бобине, выбранные для предоставления вычислительным средствам информации, обеспечивающей возможность вычисления относительного положения муфты относительно целевой трубы;
по меньшей мере, один из приводных механизмов, каждый из которых предназначен для управления перемещением системы с одной степенью свободы, представляет собой исполнительный механизм пропорционального управления;
устройство содержит командный интерфейс для оператора, и связь между командным интерфейсом и вычислительными средствами осуществляется, как беспроводная связь, при этом командный интерфейс содержит передатчик для беспроводной связи с приемником, соединенным с вычислительными средствами;
устройство содержит, по меньшей мере, два средства для предоставления информации о положении муфты, при этом одно из них обеспечивает возможность определения положения муфты с большей точностью, чем другое, и вычислительные средства используют для определения местоположения муфты средство определения местоположения, имеющее большую точность, когда расстояние между муфтой и целевой трубой становится меньше заранее заданного расстояния.
При перемещении муфты слишком далеко от основания существует риск повреждения системы, в частности, за счет разрыва или столкновения. При перемещении муфты слишком далеко от основания во время выдвигания/удлинения существует риск разрыва системы. При повороте муфты относительно основания, в частности, когда несколько загрузочных систем расположены параллельно на причале, существует риск столкновения с соседними загрузочными системами: используется термин «повреждение из-за столкновения».
Для избежания подобного повреждения загрузочной системы на определенных типах загрузочных устройств были предусмотрены устройства аварийной сигнализации.
Известны системы, в которых используются бесконтактные датчики приближения объекта и датчики угла, расположенные на элементах или на траектории элементов загрузочной системы. Недостатком систем для обнаружения приближения или переключателей является то, что они требуют знания кинематики загрузочной системы и определяемой ею установки переключателей или датчиков в определенном положении в системе для ограничения рабочих зон. Кроме того, данные датчики выдают только сигнал типа «включено/выключено», что ограничивает возможности для аварийных сигналов. Существует одна граница зоны на датчик. Устройства с датчиками угла обеспечивают возможность ограничения рабочих зон, но обеспечивают придание системе жесткой структуры для размещения датчиков в ней. В заключение, в настоящее время не известны никакие системы, обеспечивающие возможность включения аварийных сигналов для систем с гибкими трубами.
С этой целью в соответствии с предпочтительным признаком настоящего изобретения, по меньшей мере, одно средство для предоставления информации о положении муфты или выполнено с возможностью взаимодействия непосредственно со средством, предназначенным для предоставления информации о положении основания и расположенным на основании или на элементе, который зафиксирован относительно основания, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания, или выполнено с возможностью предоставления информации об абсолютном положении муфты в пространстве, и при основании, имеющем фиксированное положение в пространстве, устройство содержит вычислительное средство, обеспечивающее возможность вычисления параметров, составляющих информацию об относительном положении муфты непосредственно относительно основания на основе информации об абсолютном положении муфты и данных о положении основания, зафиксированного в пространстве, при этом устройство дополнительно содержит вычислительные средства, выполненные с возможностью:
вычисления в реальном времени, в соответствии с перемещениями муфты относительно основания, параметров, составляющих информацию о положении муфты относительно основания, при этом данные, определяющие границы, по меньшей мере, одной зоны позиционирования, разрешенной для муфты, параметризованы в вычислительных средствах,
проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны,
выдачи определенного аварийного сигнала, когда муфта выйдет из соответствующей разрешенной зоны для предупреждения оператора.
Таким образом, границы разрешенных зон или рабочих зон определяются виртуально вычислительными средствами. Отсутствует необходимость в обеспечении наличия датчиков или переключателей, физически расположенных на загрузочной системе для определения границ подобных зон, и они могут быть легко параметризованы посредством вычислительных средств.
Это обеспечивает возможность повышения безопасности использования за счет аварийных сигналов, включаемых более точно, независимо от кинематики и конструкции загрузочной системы.
Кроме того, существует возможность обеспечения множества разрешенных зон, например, перекрывающих друг друга, имеющих разные степени риска в процессе работы и соответствующих разным аварийным сигналам в соответствии с тем, сопряжена ли работа в рассматриваемой зоне с большим или меньшим риском.
В соответствии с предпочтительным признаком вычислительные средства выполнены с возможностью прекращения подачи управляющих команд, подлежащих выдаче каждому из приводных механизмов для сообщения движения муфте.
Таким образом, операция соединения автоматически прекращается при включении аварийного сигнала, что обеспечивает возможность повышения безопасности устройства согласно изобретению.
В соответствии с предпочтительным признаком несколько морских загрузочных систем соединены с вычислительными средствами, и на командном интерфейсе предусмотрен переключатель для избирательного управления одной из загрузочных систем, соединенных с вычислительными средствами.
Таким образом, оператор должен просто выбрать рукав, который он хочет соединить с муфтой, и операция будет выполнена автоматически независимо от того, является ли целевая труба подвижной или статичной.
В соответствии с другим аспектом изобретения разработано вычислительное устройство для устройства, подобного описанному выше, которое выполнено с возможностью:
вычисления относительного положения муфты относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные перемещения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе,
подачи указанных управляющих команд для приближения муфты к целевой трубе до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения.
В соответствии с еще одним аспектом изобретения разработан способ для вычислительных средств устройства, подобного описанному выше, включающий в себя следующие вычислительные операции:
вычисление относительного положения муфты относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисление параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные перемещения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе,
подачу указанных управляющих команд для приближения муфты к целевой трубе до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения.
Разъяснение изобретения далее будет продолжено посредством подробного описания одного варианта осуществления, приведенного ниже в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - схематический вид в перспективе загрузочного рукава, снабженного управляющим устройством согласно изобретению;
фиг.2 - обзорная схема работы устройства с фиг.1;
фиг.3 - функциональная схема для представления принципа работы управляющего устройства с фиг.1 и 2;
фиг.4 - схематический вид в перспективе другого варианта осуществления загрузочного рукава, снабженного управляющим устройством согласно изобретению; и
фиг.5 - схематический вид в перспективе еще одного варианта осуществления загрузочного рукава, снабженного управляющим устройством согласно изобретению.
Фиг.1 - очень схематичное изображение загрузочного рукава 2, снабженного управляющим устройством 1 согласно изобретению. Изображение загрузочного рукава здесь очень упрощено, и в этой связи следует напомнить о том, что управляющее устройство согласно изобретению адаптируется к любому типу морской загрузочной системы, в частности к загрузочным системам, описанным выше.
Загрузочный рукав по фиг.1 содержит основание 21, соединенное с резервуаром для текучей среды, который расположен под поверхностью 22, на которой зафиксировано основание. В данном случае она представляет собой причал, но в одном варианте она представляет собой судно. На вершине основания шарнирно, с возможностью поворота, присоединена коленчатая труба 23, к которой, в свою очередь, шарнирно присоединена первая труба, называемая внутренней трубой 24, противоположный конец которой шарнирно соединен со второй трубой, называемой наружной трубой 25. Конец наружной трубы несет муфту 26, выполненную с возможностью присоединения к целевой трубе 35, расположенной в данном примере на судне 36, показанном очень схематично.
В изображенном варианте осуществления само по себе известным образом муфта имеет три степени свободы при повороте относительно конца наружной трубы. В этом варианте осуществления данные три поворота являются свободными, так что оператор может свободно регулировать угол муфты во время конечной фазы приближения для присоединения муфты к целевой трубе.
В альтернативном непоказанном варианте осуществления управление одним или несколькими из данных поворотов осуществляется посредством приводных механизмов, которые присоединены к командному интерфейсу для того, чтобы позволить оператору непосредственно управлять поворотами при конечном приближении муфты.
Само по себе известным образом муфта в данном варианте осуществления содержит фиксирующие захваты 31, которые закрываются посредством приводного механизма 30, изображенного очень схематично, для удерживания муфты 26 вокруг целевой трубы 35, как только они будут соединены.
В целом данный тип загрузочного рукава сам по себе известен и не будет описан здесь более подробно. Кроме того, следует напомнить, что управляющее устройство согласно изобретению адаптируется ко всем морским загрузочным системам, и что адаптация управляющего устройства согласно изобретению к любому другому типу загрузочной системы, в частности к одной из систем, описанных выше, находится в пределах способностей специалиста в данной области техники.
В устройстве согласно изобретению, подобном схематически изображенному на фиг.1, приводные механизмы 27, 28, 29 предусмотрены у каждого из трех шарнирных соединений загрузочного рукава (символически изображенных двойными стрелками А, В, С). Более точно, первый приводной механизм 27 предусмотрен между вершиной основания 21 и коленчатой трубой 23 для поворота коленчатой трубы 23 в горизонтальной плоскости относительно основания, второй приводной механизм 28 предусмотрен между концом коленчатой трубы 23 и внутренней трубой 24 для поворота внутренней трубы в вертикальной плоскости, и третий приводной механизм 29 предусмотрен между внутренней трубой 24 и наружной трубой 25 для обеспечения поворота наружной трубы 25 в вертикальной плоскости.
Три приводных механизма 27, 28, 29 представляют собой гидравлические цилиндры, изображенные очень схематично на фиг.1. В варианте, который не проиллюстрирован, один или несколько из гидравлических цилиндров заменены гидравлическими двигателями. В соответствии с другим вариантом, который не проиллюстрирован, приводные механизмы представляют собой электрические или пневматические двигатели.
Целевая труба 35, предусмотренная здесь на судне 36, показанном очень схематично, снабжена блоком 34, ограждающим средство для предоставления информации о положении целевой трубы, которое в данном варианте осуществления представляет собой устройство системы для глобального определения местоположения типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения и, более точно, пространственных координат свободного конца целевой трубы.
То же самое применимо для муфты 26, которая содержит блок 33, ограждающий устройство системы для глобального определения местоположения типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения и, более точно, пространственных координат присоединительного конца муфты.
Вычислительные средства управляющего устройства объединены в вычислительное устройство 41, расположенное в шкафу 40 электроавтоматики.
Гидравлическая станция 42 предусмотрена для снабжения приводных механизмов гидравлической энергией, необходимой для их работы. Управление гидравлической станцией 42 осуществляется посредством вычислительного устройства 41.
Каждый из блоков 33 и 34 глобальной системы навигации и определения местоположения (GPS) соответственно снабжен излучающим устройством 33А и 34А для выдачи сигнала, содержащего информацию о положении. Вычислительное устройство соединено с принимающим устройством 40А, выполненным с возможностью приема указанных сигналов от излучателей 33А и 34А. Кроме того, управляющее устройство содержит командный интерфейс 60 для оператора.
Альтернативно, блок 33 расположен на элементе, расположенном непосредственно рядом с муфтой, например, на одном из элементов, шарнирно присоединенных к концу рукава, при этом вычислительные средства выполнены с возможностью экстраполяции информации о положении муфты по отношению к информации, предоставленной блоком.
Как можно видеть более детально на фиг.2, на обзорной схеме работы устройства согласно фиг.1 вычислительное устройство 41 соединено с принимающим устройством 40А, которое представляет собой радиоприемник, выполненный с возможностью сообщения с радиопередающими устройствами 33А и 34А, соответственно соединенными с блоками 33 и 34 глобальной системы навигации и определения местоположения (GPS), предусмотренными на муфте и на целевой трубе. Таким образом, блоки глобальной системы навигации и определения местоположения (GPS) обеспечивают предоставление вычислительному устройству информации о положении муфты и целевой трубы.
В альтернативном варианте осуществления блоки глобальной системы навигации и определения местоположения (GPS) представляют собой устройства, предназначенные для сообщения друг с другом для предоставления непосредственно вычислительному устройству информации об относительном положении муфты относительно целевой трубы.
Загрузочный рукав 2 снабжен приводными механизмами 27, 28, 29, управление которыми осуществляется посредством клапанов, при этом управление самими клапанами осуществляется посредством вычислительного устройства. Гидравлическая станция 42 снабжает приводные механизмы гидравлической энергией, необходимой для их работы, через посредство указанных клапанов. Вычислительное устройство управляет гидравлической станцией 42 посредством реле 43 мощности для управления запуском и остановом гидравлической станции. Гидравлическая станция содержит насос (непоказанный), выполненный с возможностью перекачивания рабочей жидкости для гидравлических систем для снабжения приводных механизмов.
Командный интерфейс 60 соединен с вычислительным устройством для того, чтобы оператор мог выдать команду на соединение муфты с целевой трубой.
Как показано на фиг.2 и 3, когда оператор хочет соединить муфту с целевой трубой, он приводит в действие кнопку 61 на командном интерфейсе 60 для выдачи команды на соединение. Сигнал, соответствующий его команде, передается затем вычислительному устройству. В этом случае вычислительное устройство запускает процедуру автоматического соединения.
Вычислительное устройство через посредство радиоприемника 40А получает информацию о положении муфты и целевой трубы от соответствующих блоков 33 и 34 глобальной системы навигации и определения местоположения (GPS). Альтернативно, в другом варианте осуществления вычислительное устройство получает информацию по кабелю непосредственно от блоков глобальной системы навигации и определения местоположения (GPS).
В соответствии с альтернативным вариантом осуществления блок 34 глобальной системы навигации и определения местоположения (GPS), расположенный на судне, передает информацию о положении целевой трубы блоку 33 глобальной системы навигации и определения местоположения (GPS), предусмотренному на загрузочном рукаве, который вычисляет относительное положение муфты относительно целевой трубы и передает результат назад вычислительному устройству посредством линии радиосвязи или проводной связи.
Вычислительное устройство преобразует данную информацию в пространственные координаты для получения относительного положения муфты относительно целевой трубы.
На основе информации об относительном положении муфты относительно целевой трубы вычислительное устройство вычисляет расстояния, которые остаются между муфтой и целевой трубой по осям X, Y и Z, схематически показанным на фиг.1.
Если данные три расстояния не равны нулю или не равны расстояниям, параметризованным в качестве контрольных расстояний, которые известны для соединения, вычислительное устройство вычисляет параметры, определяющие управляющие команды для каждого из приводных механизмов 27, 28, 29 рукава так, чтобы их комбинированные движения приводили к перемещению муфты, направленному на приближение муфты к целевой трубе по трем осям. После этого вычислительное устройство подает управляющие команды, определенные для каждого приводного механизма, приводным механизмам 27, 28, 29 через посредство соответствующих клапанов. Как только команды будут выполнены приводными механизмами, вычислительное устройство снова вычисляет расстояния, остающиеся между муфтой и целевой трубой, вдоль осей X, Y и Z. Если данные расстояния по-прежнему не равны нулю или не равны параметризованным расстояниям (например, когда состояние моря плохое), вычислительное устройство возобновляет вычисления параметров, определяющих команды для приводных механизмов и подает их до тех пор, пока расстояния не станут равными нулю или равными параметризованным расстояниям. Другими словами, вычислительное устройство подает управляющие команды по команде оператора через посредство командного интерфейса 60 для приближения муфты к целевой трубе до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения.
Если три расстояния равны нулю или равны параметризованным расстояниям, это означает, что муфта размещена напротив целевой трубы в заданном положении для присоединения. В этом случае вычислительное устройство передает управляющую команду приводному механизму 30 муфты для фиксации муфты на целевой трубе и затем команду на выключение приводных механизмов 27, 28, 29 рукава для того, чтобы сделать перемещения рукава свободными, как только муфта будет присоединена к целевой трубе и зафиксирована относительно нее.
В заключение, индикаторная лампа 62 на командном интерфейсе показывает оператору, что автоматическое соединение успешно завершилось.
Непоказанная кнопка аварийного останова, предназначенная для останова процедуры автоматического соединения, предусмотрена на командном интерфейсе 60.
В варианте, который не показан, на командном интерфейсе предусмотрены другие индикаторы для выдачи оператору сигналов о различных отказах или проблемах в процессе автоматического соединения.
В соответствии с непоказанным вариантом осуществления средство для предоставления информации о положении муфты выполнено с возможностью взаимодействия непосредственно со средством для предоставления информации о положении основания, расположенным на основании или на элементе, который зафиксирован относительно основания, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания. Это может быть, например, тот же блок 33 глобальной системы навигации и определения местоположения (GPS), взаимодействующий с другим блоком глобальной системы навигации и определения местоположения (GPS), расположенным на основании. Альтернативно, если основание зафиксировано относительно причала, средство для предоставления информации о положении муфты выполнено с возможностью предоставления информации об абсолютном положении муфты в пространстве, например, посредством блока глобальной системы навигации и определения местоположения (GPS), и при основании, занимающем фиксированное положение в пространстве, вычислительное устройство выполнено с возможностью вычисления относительного положения муфты непосредственно относительно основания на основе координат зафиксированного основания в глобальной системе навигации и определения местоположения (GPS) и координат муфты, подвижной в пространстве, в глобальной системе навигации и определения местоположения (GPS). В данном варианте осуществления вычислительное устройство вычисляет в реальном времени параметры, составляющие информацию о положении муфты относительно основания в соответствии с перемещениями муфты и информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты. В вычислительном устройстве параметризованы данные, определяющие границы, по меньшей мере, одной разрешенной зоны для позиционирования муфты, и вычислительное устройство выполнено с возможностью проверки в реальном времени того, находится ли муфта в разрешенной зоне. В противном случае вычислительное устройство выполнено с возможностью выдачи аварийного сигнала, когда муфта выходит из соответствующей разрешенной зоны. Предпочтительно, в соответствии с одним вариантом вычислительные средства выполнены с возможностью прекращения выполнения команды на автоматическое присоединение муфты при выдаче подобного аварийного сигнала. Предпочтительно то, что факт наличия подобных разрешенных зон или рабочих зон позволяет избежать риска повреждения системы, в частности, вследствие разрыва или столкновения, когда муфта переместится слишком далеко от основания во время удлинения или поворота.
В данном случае вычислительное устройство является программируемым для задания границ рабочих зон и/или запрещенных зон, которые могут быть параметризованы оператором в соответствии с каждой операцией загрузки или выгрузки текучих продуктов. Это обеспечивает возможность, например, адаптации операции автоматического соединения к разным судам, которые могут иметь разные возможные зоны столкновения.
Световые или звуковые индикаторы предусмотрены для предупреждения оператора о пересечении границы разрешенной зоны.
В варианте осуществления, который не показан, несколько морских загрузочных систем соединены с одним и тем же вычислительным устройством 41, и на командном интерфейсе предусмотрен переключатель для избирательного управления присоединением одной или другой из загрузочных систем, связанных с вычислительным устройством. Рабочие зоны, соответствующие соседним загрузочным системам, запрограммированы так, чтобы избежать столкновений между разными загрузочными системами.
В альтернативном варианте осуществления, который не показан, три степени свободы поворота муфты на ее конце относительно конца наружной трубы регулируются посредством приводных механизмов, например, посредством гидравлических двигателей или силовых гидроцилиндров. Устройство предусмотрено со средствами для предоставления информации об угловой ориентации муфты и со средствами для предоставления информации об угловой ориентации целевой трубы, например, маятниковыми датчиками. Соответствующие вычислительные средства предусмотрены для вычисления параметров, определяющих управляющие команды, выдаваемые приводным механизмам, в соответствии с информацией, предоставленной средствами, предназначенными для предоставления информации об угловой ориентации муфты и целевой трубы, для того, чтобы угловая ориентация муфты в положении для присоединения была по существу такой же, как угловая ориентация целевой трубы. Таким образом, соединение выполняется более точно и более надежно за счет того, что при соединении целевая труба и муфта выровнены друг относительно друга. Это позволяет, в частности, уменьшить риски повреждения уплотнений между муфтой и целевой трубой.
Во всех случаях, когда соединение было выполнено, то есть когда муфта была зафиксирована на целевой трубе, вычислительное устройство передает команду на выключение приводных механизмов, чтобы сделать перемещения системы свободными для того, чтобы муфта могла свободно повторять движения целевой трубы.
Фиг.4 представляет собой схематический вид в перспективе другого варианта осуществления загрузочного рукава, снабженного управляющим устройством согласно изобретению, в котором средство для предоставления информации о положении муфты представляет собой камеру, установленную на муфте. Изображение муфты было упрощено для ясности.
Мишень 71 расположена на целевой трубе 35. Камера предназначена для фокусировки на мишени и передачи вычислительному устройству изображения мишени. Вычислительное устройство выполнено с возможностью вычисления относительного положения муфты относительно целевой трубы, исходя из данного изображения.
Для этого в вычислительном устройстве предусмотрен алгоритм обработки изображения и распознавания формы для определения расстояния и угла, чтобы, исходя из них, определить относительное положение муфты относительно целевой трубы. Для вычисления расстояния алгоритм использует принцип, в соответствии с которым чем больше расстояние между муфтой и целевой трубой, тем меньше изображение мишени, и для вычисления угла - принцип, в соответствии с которым для круглой мишени изображение мишени является круглым, когда муфта находится вдоль оси целевой трубы, и изображение мишени является эллиптическим, когда муфта смещена в аксиальном направлении относительно целевой трубы.
В другом варианте несколько камер расположены с возможностью фокусировки на одной и той же мишени и выдачи нескольких изображений вычислительному устройству, при этом вычислительное устройство выполнено с возможностью обработки всех этих изображений для вычисления координат относительного положения муфты относительно целевой трубы.
В еще одном варианте осуществления камера установлена на моторизованной опоре, управление которой осуществляется с помощью вычислительных средств для поворота ее так, чтобы она была постоянно ориентирована по направлению к мишени и обеспечивала возможность того, что угловая ориентация камеры относительно оси муфты будет известна в любой момент времени, при этом вычислительные средства выполнены с возможностью обработки данной информации об угловой ориентации и обработки изображения, передаваемого камерой, для управления перемещением муфты в заданное положение для присоединения.
Предпочтительно, по соображениям, связанным с эксплуатационными характеристиками, мишень представляет собой отражающий визир.
В соответствии с предпочтительным вариантом, который не проиллюстрирован, мишень может быть исключена, и камера может быть выполнена так, что она будет воспринимать свободный конец самой целевой трубы в качестве мишени. Данный вариант осуществления позволяет обходиться, в частности, без визира или мишени на целевой трубе. Таким образом, если, например, целевая труба находится на судне, обеспечивается возможность адаптации устройства ко всем судам, трубы которых совместимы с муфтой, независимо от того, снабжены ли они мишенью или нет.
За исключением различий, описанных выше, структурно и функционально данный вариант осуществления такой же, как вариант осуществления по фиг.1-3, и, следовательно, он не будет описан здесь более подробно.
В соответствии с еще одним вариантом осуществления, который не проиллюстрирован, камера может быть расположена на целевой трубе или на мостике судна так, что она будет зафиксирована или моторизована относительно мостика судна и будет ориентирована с возможностью выдачи вычислительному устройству изображения муфты, чтобы вычислительное устройство могло вычислить относительное положение муфты относительно целевой трубы, используя тот же принцип.
Фиг.5 представляет собой схематический вид в перспективе еще одного варианта осуществления загрузочного рукава, снабженного управляющим устройством согласно изобретению, в котором средство для предоставления информации о положении муфты представляет собой шнур, натянутый между целевой трубой и муфтой.
На одном из своих концов шнур 75 имеет средства для крепления его к целевой трубе. Другой конец шнура прикреплен к барабану бобины 72, которая сама смонтирована на муфте. Бобина содержит датчик 73 относительного отсчета, обеспечивающий возможность определения длины размотанного шнура, при этом данная информация передается в вычислительное устройство, которое, исходя из нее, определяет расстояние между муфтой и целевой трубой.
Кроме того, датчик 74 угла шнура предусмотрен для шнура 75 для определения наклона шнура относительно, по меньшей мере, двух опорных углов.
Таким образом, существует возможность определения относительного положения муфты относительно целевой трубы, исходя из двух опорных углов и расстояния, на которое размотаны шнуры. Датчик угла представляет собой, например, датчик, в котором инклинометр или лазер используется для определения наклона шнура относительно указанных, по меньшей мере, двух опорных углов.
В качестве варианта устройство предусмотрено с множеством бобин, шнуры которых прикреплены в отдельных местах, так что только на основе информации о расстояниях, на которые размотаны шнуры, предоставленной датчиками на бобинах, вычислительное устройство вычисляет углы и расстояние для относительного положения муфты относительно целевой трубы.
При установке его в заданное положение шнур в первую очередь прикрепляют к метательному снаряду, который бросают с помощью средств, известных специалисту в данной области техники, с причала на судно или с судна на другое судно. После этого оператор прикрепляет свободный конец шнура к месту, предусмотренному на целевой трубе. Затем оператор может инициировать процедуру автоматического соединения, используя тот же принцип, что и в варианте осуществления по фиг.1-3.
В соответствии с вариантом, который не проиллюстрирован, бобина снабжена датчиком разрыва шнура для приостановки операции соединения в случае разрыва шнура и инициирования операции отвода рукава. В этом случае соответствующее предупреждение передается оператору посредством командного интерфейса, например посредством индикаторной лампы, указывающей на разрыв шнура.
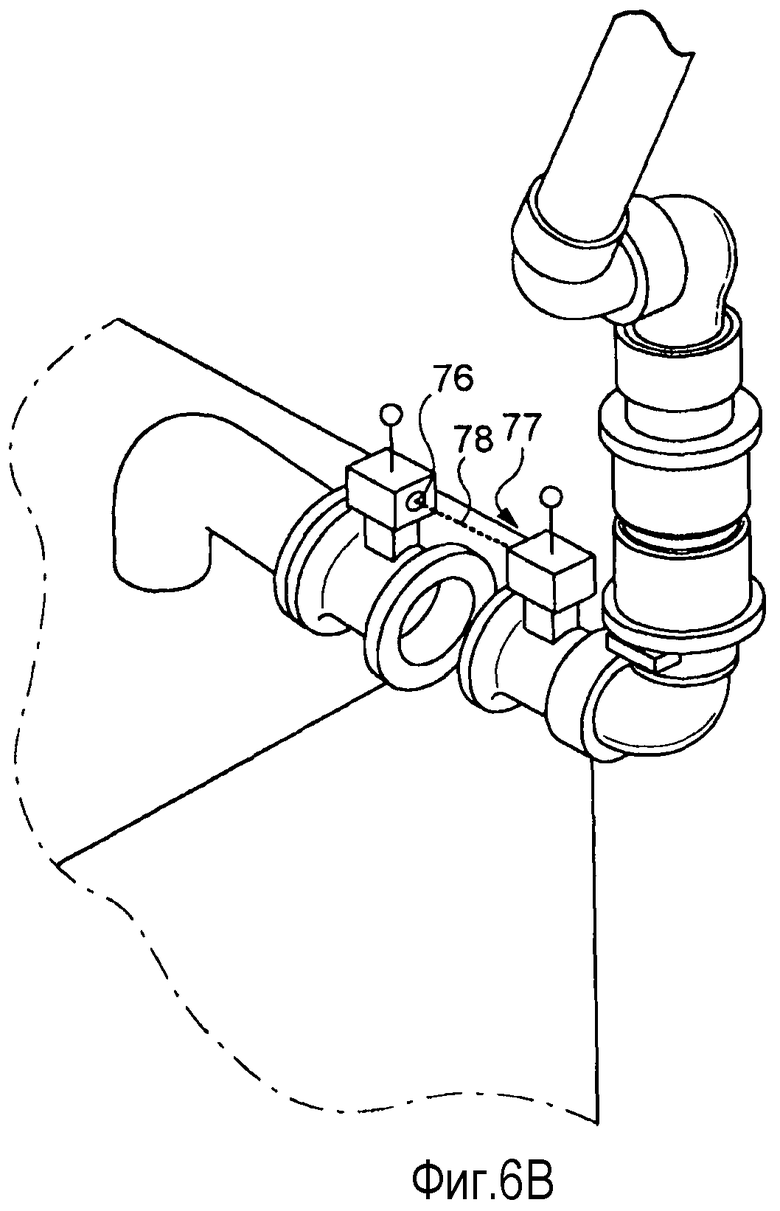
Фиг.6а и 6b представляют собой схематические виды в перспективе еще одного варианта осуществления загрузочного рукава, снабженного управляющим устройством согласно изобретению, в котором используются два разных средства предоставления информации о положении муфты. Одно из средств обеспечивает возможность определения положения муфты с большей точностью, чем другое. Вычислительное устройство 41 выполнено с возможностью использования средства для определения местоположения муфты, имеющего наименьшую точность, для выполнения неточного приближения для присоединения муфты к целевой трубе, и затем, когда расстояние между муфтой и целевой трубой становится меньше заранее заданного расстояния, вычислительное устройство использует средство для предоставления информации о положении муфты, имеющее наибольшую точность, для выполнения конечной стадии приближения для размещения муфты перед целевой трубой в заданном положении для присоединения. На практике на первой стадии вычислительное устройство использует блоки 33 и 34 глобальной системы навигации и определения местоположения (GPS) в соответствии с таким же принципом, какой описан ранее, и на второй стадии - лазерное устройство, содержащее лазерный излучатель 77 и мишень 76, при этом устройство выполнено с возможностью определения посредством лазерного луча 78 относительного положения муфты относительно целевой трубы во время конечной стадии приближения, направленного на размещение муфты перед целевой трубой в заданном положении для присоединения. Таким образом, устройство предпочтительно использует преимущества, связанные с признаками разных средств для предоставления информации о положении муфты и целевой трубы, посредством согласования их степеней точности с оставшимся расстоянием до заданного положения для присоединения. Посредством этого оптимизируется точность соединения. В качестве варианта лазерное устройство заменено инфракрасным устройством.
В целом, в варианте, который не проиллюстрирован и который применим для всех вариантов осуществления, описанных выше, одно и то же вычислительное устройство обеспечивает управление несколькими рукавами. Переключатель, предусмотренный на командном интерфейсе, обеспечивает возможность управления множеством загрузочных рукавов, соединенных с одним и тем же вычислительным устройством, посредством использования одного и того же принципа и с помощью одного и того же командного интерфейса.
В другом общем варианте, который не проиллюстрирован, командный интерфейс представляет собой устройство дистанционного управления, предусмотренное с передатчиком, предназначенным для беспроводной связи с приемником, соединенным с вычислительным устройством в шкафу электроавтоматики. Связь между передатчиком и приемником осуществляется посредством радиоволн. В качестве варианта связь между передатчиком и приемником осуществляется посредством световых волн, например, инфракрасных волн.
В одном варианте, который не проиллюстрирован, по меньшей мере, один из приводных механизмов загрузочного рукава представляет собой исполнительный механизм пропорционального управления. В данном варианте вычислительное устройство выполнено с возможностью управления исполнительными механизмами пропорционального управления. Предпочтительно то, что применение исполнительного механизма пропорционального управления обеспечивает возможность выполнения перемещения муфты, которое является перемещением в прямом направлении и прямолинейным и, следовательно, более коротким и более быстрым. Это позволяет сократить время на операцию автоматического соединения.
В соответствии с обстоятельствами возможны многочисленные другие варианты, и в этой связи следует отметить, что изобретение не ограничено представленными и описанными примерами.





Устройство (1) управления перемещением и позиционированием муфты (26) для морской загрузочной системы (2) содержит, по меньшей мере, один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе (35). При этом устройство (1) содержит, по меньшей мере, три приводных механизма (27, 28, 29), каждый из которых предназначен для управления перемещением системы с одной степенью свободы, и командный интерфейс (60), и, по меньшей мере, один элемент из группы, состоящей из муфты и целевой трубы, или элемент, который зафиксирован относительно одного, по меньшей мере, из элементов группы, состоящей из муфты и целевой трубы, содержит, по меньшей мере, одно средство (33, 34) для предоставления информации о положении муфты. Устройство (1) содержит, кроме того, вычислительные средства (41), выполненные с возможностью: вычисления относительного положения муфты непосредственно относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты, вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные движения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе, подачи указанных управляющих команд для приближения муфты к целевой трубе, повторения трех предшествующих операций до тех пор, пока муфта не окажется размещенной перед целевой трубой в заданном положении для присоединения. Технический результат - ускорение и облегчение операции управления перемещением муфты для оператора в процессе присоединения муфты к целевой трубе и обеспечение возможности использования различных типов консолей. 3 н. и 16 з.п. ф-лы, 7 ил.
1. Устройство (1) управления перемещением и позиционированием муфты (26) для морской загрузочной системы (2), при этом морская загрузочная система содержит, по меньшей мере, один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе (35), причем муфта имеет, по меньшей мере, три степени (А, В, С) свободы относительно основания, отличающееся тем, что оно содержит, по меньшей мере, три приводных механизма (27, 28, 29), каждый из которых предназначен для управления перемещением системы с одной степенью свободы, и, по меньшей мере, одно средство (33, 34) для предоставления информации о положении муфты, размещаемое на, по меньшей мере, одном элементе из группы, состоящей из муфты и целевой трубы, или элементе, расположенном непосредственно рядом с одним, по меньшей мере, из элементов группы, состоящей из муфты и целевой трубы, причем устройство дополнительно содержит вычислительные средства (41), выполненные с возможностью:
вычисления относительного положения муфты непосредственно относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные движения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе,
подачи управляющих команд для приближения муфты к целевой трубе,
повторения трех предшествующих операций до тех пор, пока муфта не окажется размещенной перед целевой трубой в заданном положении для присоединения;
при этом, по меньшей мере, один элемент из группы, состоящей из муфты и целевой трубы, или элемент, который зафиксирован относительно, по меньшей мере, одного из элементов из группы, состоящей из муфты и целевой трубы, содержит, по меньшей мере, одно средство (34) для предоставления информации о положении целевой трубы, причем вычислительные средства выполнены с возможностью определения относительного положения муфты (26) относительно целевой трубы (35) на основе информации о положении трубы и информации о положении муфты, предоставленной, по меньшей мере, двумя средствами (33, 34), предназначенными для предоставления информации о положении,
при этом средство (34) для предоставления информации о положении целевой трубы включает в себя устройство системы для глобального определения местоположения, в частности, типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения целевой трубы, причем вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно целевой трубы на основе информации об абсолютном положении целевой трубы.
2. Устройство по п.1, отличающееся тем, что муфта (26) шарнирно присоединена на ее конце с тремя степенями свободы поворота, причем, по меньшей мере, один из трех поворотов регулируется приводным механизмом, при этом устройство предусмотрено со средствами для предоставления информации об угловой ориентации муфты и средствами для предоставления информации об угловой ориентации целевой трубы, причем вычислительные средства (41) выполнены с возможностью вычисления на основе информации, предоставленной средствами, предназначенными для предоставления информации об угловой ориентации, параметров, определяющих управляющие команды, подлежащие выдаче, по меньшей мере, одному приводному механизму, чтобы угловая ориентация муфты (26) в положении для присоединения была, по существу, такой же, как угловая ориентация целевой трубы (35).
3. Устройство по п.1 или 2, отличающееся тем, что оно дополнительно содержит приводной механизм (30), обеспечивающий возможность фиксации и расфиксации муфты, причем как только муфта окажется размещенной перед целевой трубой в заданном положении для присоединения, вычислительные средства (41) подают управляющую команду приводному механизму (30) на фиксацию муфты на целевой трубе.
4. Устройство по п.3, отличающееся тем, что, как только муфта (26) будет присоединена и зафиксирована на целевой трубе (35), вычислительные средства (41) подают команду на выключение приводных механизмов для управления перемещением системы с ее степенями свободы для того, чтобы сделать перемещения системы свободными.
5. Устройство по п.1 или 2, отличающееся тем, что средство (33) для предоставления информации о положении муфты и средство (34) для предоставления информации о положении целевой трубы выполнены с возможностью коммуникации друг с другом и содержат вычислительные средства для вычисления и непосредственно предоставления информации об относительном положении муфты относительно целевой трубы.
6. Устройство по п.1 или 2, отличающееся тем, что средство (33) для предоставления информации о положении муфты включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи абсолютного положения муфты, при этом вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно целевой трубы на основе информации об абсолютном положении муфты и целевой трубы.
7. Устройство по п.6, отличающееся тем, что устройства (33, 34) для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), представляют собой устройства, предназначенные для коммуникации друг с другом, и содержат вычислительные средства, предназначенные для вычисления и непосредственного предоставления информации об относительном положении муфты относительно целевой трубы.
8. Устройство по п.1 или 2, отличающееся тем, что одно из средств для предоставления информации о положении муфты или целевой трубы включает в себя оптическое устройство (76, 78), выполненное с возможностью взаимодействия соответственно с целевой трубой, или муфтой, или с мишенью, которая зафиксирована соответственно относительно целевой трубы или относительно муфты, посредством излучения светового луча (78), такого как лазерный луч, по направлению к целевой трубе или к муфте, или к мишени, которая зафиксирована соответственно относительно целевой трубы или муфты, и обнаружения отраженного луча и измерения времени прохождения луча для получения исходя из этого информации об относительном положении муфты непосредственно относительно целевой трубы.
9. Устройство по п.1 или 2, отличающееся тем, что средство для предоставления информации о положении муфты включает в себя оптическую камеру (70), выполненную и установленную с возможностью выдачи изображения муфты вычислительным средствам, при этом вычислительные средства выполнены с возможностью обработки изображения, выданного камерой, для вычисления относительного положения муфты относительно целевой трубы.
10. Устройство по п.1 или 2, отличающееся тем, что, по меньшей мере, один шнур (75) натянут посредством использования бобины (72) между муфтой и целевой трубой, причем средства для предоставления информации о положении представляют собой, по меньшей мере, один датчик (74) угла и/или, по меньшей мере, один датчик (73) длины размотанного шнура на бобине, выбранные для предоставления вычислительным средствам (41) информации, обеспечивающей возможность вычисления относительного положения муфты относительно целевой трубы.
11. Устройство по п.1 или 2, отличающееся тем, что, по меньшей мере, один из приводных механизмов (27, 28, 29), каждый из которых предназначен для управления перемещением системы с одной степенью свободы, представляет собой исполнительный механизм пропорционального управления.
12. Устройство по п.1 или 2, отличающееся тем, что оно содержит командный интерфейс (60) для оператора, причем связь между командным интерфейсом (60) и вычислительными средствами осуществляется по беспроводной связи, при этом командный интерфейс содержит передатчик для беспроводной связи с приемником, соединенным с вычислительными средствами.
13. Устройство по п.1 или 2, отличающееся тем, что оно содержит, по меньшей мере, два средства (33, 34, 77, 76) для предоставления информации о положении муфты, одно (77, 76) из которых обеспечивает возможность определения положения муфты с большей точностью, чем другое (33, 34), при этом вычислительные средства (41) используют для определения местоположения муфты средство определения местоположения, имеющее большую точность, когда расстояние между муфтой и целевой трубой становится меньше заданного расстояния.
14. Устройство по п.1 или 2, отличающееся тем, что, по меньшей мере, одно средство (33) для предоставления информации о положении муфты либо выполнено с возможностью взаимодействия непосредственно со средством, предназначенным для предоставления информации о положении основания и расположенным на основании (21) или на элементе, который зафиксирован относительно основания, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания, либо выполнено с возможностью предоставления информации об абсолютном положении муфты в пространстве, и при основании, имеющем фиксированное положение в пространстве, устройство содержит вычислительные средства, обеспечивающие возможность вычисления параметров, составляющих информацию об относительном положении муфты непосредственно относительно основания на основе информации об абсолютном положении муфты и данных о положении основания, зафиксированного в пространстве, при этом устройство дополнительно содержит вычислительные средства, выполненные с возможностью:
вычисления в реальном времени, в соответствии с перемещениями муфты относительно основания, параметров, составляющих информацию о положении муфты относительно основания, при этом данные, определяющие границы, по меньшей мере, одной зоны позиционирования, разрешенной для муфты, параметризованы в вычислительных средствах,
проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны, и
выдачи определенного аварийного сигнала, когда муфта выйдет из соответствующей разрешенной зоны для предупреждения оператора.
15. Устройство по п.14, отличающееся тем, что
вычислительные средства (41) выполнены с возможностью прекращения подачи управляющих команд, подлежащих выдаче каждому из приводных механизмов для сообщения движения муфте.
16. Устройство по п.1 или 2, отличающееся тем, что несколько морских загрузочных систем соединены с вычислительными средствами (41), причем на командном интерфейсе (60) предусмотрен переключатель для избирательного управления одной из загрузочных систем, соединенных с вычислительными средствами.
17. Вычислительное устройство (41) для устройства по любому из пп.1-16, отличающееся тем, что оно выполнено с возможностью:
вычисления относительного положения муфты относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные перемещения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе, и
подачи управляющих команд для приближения муфты к целевой трубе до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения.
18. Способ вычислений для вычислительных средств устройства по любому из пп.1-16, отличающийся тем, что он включает в себя вычислительные операции, состоящие из:
вычисления относительного положения муфты относительно целевой трубы в соответствии с информацией, предоставленной средством, предназначенным для предоставления информации о положении муфты,
вычисления параметров, определяющих управляющие команды, подлежащие выдаче каждому из приводных механизмов так, что их комбинированные перемещения приводят к перемещению муфты, направленному на приближение муфты к целевой трубе,
подачи управляющих команд для приближения муфты к целевой трубе до тех пор, пока она не окажется размещенной перед целевой трубой в заданном положении для присоединения.
19. Морская загрузочная система (2), отличающаяся тем, что она содержит, по меньшей мере, один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе (35) и имеющей, по меньшей мере, три степени (А, В, С) свободы относительно основания, и устройство (1) управления по любому из пп.1-16.
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ (ВАРИАНТЫ) | 1998 |
|
RU2184090C2 |
| US 4408943, 11.10.1983 | |||
| US 4758970, 19.07.1988 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕКЛА С ГРАДИЕНТОМ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ | 1991 |
|
RU2008287C1 |

