Изобретение относится к оптической локации, в частности к системам информационного обеспечения высокоточных систем наведения лазерных локационных комплексов на подвижные объекты. Кроме того, изобретение может быть использовано в системах корреляционного сравнения изображений и корреляционного анализа.
Изобретение может быть также использовано при создании систем обнаружения объекта на фоне подстилающей поверхности и определения координат обнаруженного объекта, преимущественно подвижного (летательные аппараты, ВКО и т. п.).
Известен корреляционно-экстремальный координатор цели, содержащий приемную оптическую систему, электрически сопряженные первое фотоприемное устройство и видеоконтрольное устройство, оптически сопряженное посредством объектива переноса, пространственно-временного модулятора света (ПВМС), светоделителя, поляризатора, первой Фурье-линзы, фотопластинки, второй Фурье-линзы с вторым фотоприемным устройством, электрически связанные с вторым видеоконтрольным устройством, а также оптически связанные со светоделителем лазер и расширитель, оптически связанные с голографическим согласованным фильтром (ГСФ) объектив и фотокамеру.
К недостаткам известного координатора относятся низкие точность и быстродействие.
Низкое быстродействие обусловлено применением в качестве согласованного голографического фильтра фотопластинки, требующей продолжительной "мокрой" обработки и ее установки в координатор с точностью до микрон.
Низкая точность известного координатора обусловлена рядом причин.
Во-первых, вследствие больших временных затрат на формирование ГСФ угловая ориентация, ракурс и масштаб изображения объекта не сохраняются, что может привести к недопустимому снижению амплитуды выходного корреляционного пика.
Во-вторых, обнаружение объекта при записи ГСФ осуществляют визуально, а диафрагмирование помех и ложных объектов осуществляют с помощью вводимой маски. Форма маски (вследствие ручного характера осуществляемого диафрагмирования) не совпадает с контуром объекта, что приводит к записи на ГСФ не только изображения объекта, но и части подстилающей поверхности.
В-третьих, связана с требованиями повторной установки голографического фильтра с точностью до микрон.
Наиболее близким к данному изобретению (прототипом) является корреляционно-экстремальный координатор цели, содержащий последовательно установленные на первой оптической оси приемную систему, первый светоделитель, первый пространственно-временной модулятор света, оптически связанные и последовательно установленные на второй оптической оси лазер, расширитель, второй светоделитель, первый затвор, второй пространственно-временной модулятор света, второй Фурье-объектив, первое фотоприемное устройство, оптически сопряженное с приемной оптической системой, пороговое устройство, вход которого соединен с выходом первого фотоприемного устройства, а выход с блоком обработки, устройство управления и синхронизации, первый, второй, третий и четвертый выходы которого соединены с входами первого и второго пространственно-временных модуляторов света, затвором и пороговым устройством.
К недостаткам известного координатора следует отнести невысокую точность. Низкая точность координатора является следствием большой вероятности "перенацеливания" на ложный (фоновый) объект или помеху и связанную с этим потерю точности определения координат цели (так как будут определяться координаты не цели, а помехи). Большая вероятность "перенацеливания" объясняется тем, что при записи эталонного изображения (ГСФ) не полностью исключается влияние помех и фоновых объектов. Это обусловлено тем, что запись и перезапись ГСФ, регулируемого на втором пространственно-временном модуляторе света, осуществляют при частично открытой апертуре первого пространственно-временного модулятора света, что приводит к регистрации одновременно с объектом и окружающих его предметов - фоновых образований. Это приводит к тому, что при достаточно интенсивной помехе произойдет "перезахват" объекта, т. е. координатор будет работать по помехе, а не по объекту. Математически это условие может быть выражено в виде
где f(x,y) - распределение освещенности по светочувствительной площадке первого пространственно-временного модулятора света (текущее изображение);
Sэт - площадь, занимаемая изображением объекта;
S - площадь изображения, используемая при перезаписи эталона (перезаписи ГСФ).
Диафрагмирование части поля зрения осуществляют путем формирования на поверхности первого ПВМС не сплошных, а матричных электродов.
Однако геометрия матричных электродов не совпадает с реальной формой объекта. Кроме того, вследствие визуального характера выделения объекта и первоначальной записи ГСФ известный координатор имеет низкое быстродействие.
Дополнительным недостатком известного устройства является также неработоспособность при низких уровнях входной освещенности, связанная с необходимостью деления светового потока на две части (одна - на второе фотоприемное устройство и далее на ВКУ для визуального обнаружения объекта, другая на - первый ПВМС), а также с недостаточной чувствительностью используемых в качестве ПВМС модуляторов света типа "ПРОМ".
Целью изобретения является повышение точности известного координатора в условиях сложной помеховой обстановки.
Цель изобретения достигается тем, что в известный корреляционно-экстремальный координатор цели, содержащий последовательно установленные на первой оптической оси приемную оптическую систему и первый ПВМС, последовательно установленные на второй оптической оси первый лазер, первый расширитель, светоделитель, затвор, второй пространственно-временной модулятор света, второй Фурье-объектив, первое фотоприемное устройство, а также первый Фурье-объектив, пороговое устройство, блок обработки, блок управления и синхронизации, первый, второй, третий и четвертый выходы блока управления и синхронизации соединены соответственно с первым и вторым ПВМС, затвором и пороговым устройством, введены третий пространственно-временной модулятор света, объектив переноса, электрооптический модулятор, поляризационный светоотделитель, коммутатор, управляемое пороговое устройство, пиковый детектор, усилитель, блок селекции, высокояркостная телевизионная камера, второй лазер, второй расширитель, причем лазер, второй расширитель, первый ПВМС оптически сопряжены с вторым ПВМС посредством поляризационного светоделителя и первого Фурье-объектива, третий ПВМС оптически сопряжен с первым лазером посредством светоделителя, с вторым ПВМС - посредством поляризационного светоделителя и первого Фурье-объектива, первый и третий ПВМС оптически сопряжены с вторым фотоприемным устройством посредством поляризационного осветителя и объектива переноса, выход второго фотоприемного устройства соединен с первым входом порогового устройства, выход которого соединен с входом блока селекции, выход блока селекции подключен к входу высокояркостной телевизионной камеры, оптически сопряженной с третьим пространственно-временным модулятором света, выход первого фотоприемного устройства соединен с входом коммутатора, первый выход которого соединен с входом пикового детектора, а второй выход соединен с первым входом управляемого порогового устройства, выход пикового детектора соединен через усилитель с вторым входом управляемого порогового устройства, выход которого соединен с входом блока обработки, выход которого соединен с входом блока обработки, выход которого соединен с первым входом блока управления и синхронизации, пятый, шестой и седьмой выходы блока управления и синхронизации соединены с третьим ПВМС, электрооптическим модулятором, управляющим входом коммутатора соответственно.
Цель достигается также тем, что первый ПВМС выполнен в виде электронно-оптического преобразователя, сопряженного с ПВМС на основе электрооптического эффекта посредством волоконно-оптической планшайбы, третий ПВМС оптически сопряжен с высокояркостной телевизионной камерой посредством волоконно-оптической планшайбы.
Цель достигается также тем, что блок селекции содержит первый и второй блоки памяти, первый и второй разностные усилители, первый и второй компараторы, логический элемент И, логический элемент ИЛИ, схему формирования строба, причем вход блока селекции соединен с входами первого и второго разностных усилителей и с входом первого блока памяти, выход которого соединен с входами формирования строба, первого и второго разностных усилителей, выходы которых соединены с входами соответствующих компараторов, выходы которых являются входами элемента ЛОГИЧЕСКОЕ ИЛИ, выход которого подключен к первому входу элемента ЛОГИЧЕСКОЕ И и к входу второго блока памяти, выход которого через элемент ЛОГИЧЕСКОЕ И соединен с управляющим входом схемы формирования, выход которой является выходом блока селекции.
На фиг. 1 приведена блок-схема устройства, где приведены следующие обозначения: 1 - приемная оптическая система, 2 - первый ПВМС, 3 - поляризационный светоделитель, 4 - объектив переноса, 5 - второе фотоприемное устройство, 6 - пороговое устройство, 7 - блок селекции, 8 - первый Фурье-объектив, 9 - первый лазер, 10 - первый расширитель, 11 - светоделитель, 12 - затвор, 13 - второй ПВМС, 14 - второй Фурье-объектив, 15 - первое фотоприемное устройство, 16 - пиковый детектор, 17- коммутатор, 18 - усилитель, 19 - управляемое пороговое устройство, 20 - блок обработки, 21 - блок управления и синхронизации, 22 - второй лазер, 23 - второй расширитель, 24 - волоконно-оптическая планшайба, 25 - электронно-оптический преобразователь, 26 - электрооптический модулятор, 27 - третий ПВМС, 27а - высокояркостная телевизионная камера, 28 - светомодулирующий слой, 29 - дихроичное диэлектрическое покрытие, 3- прозрачные электроды.
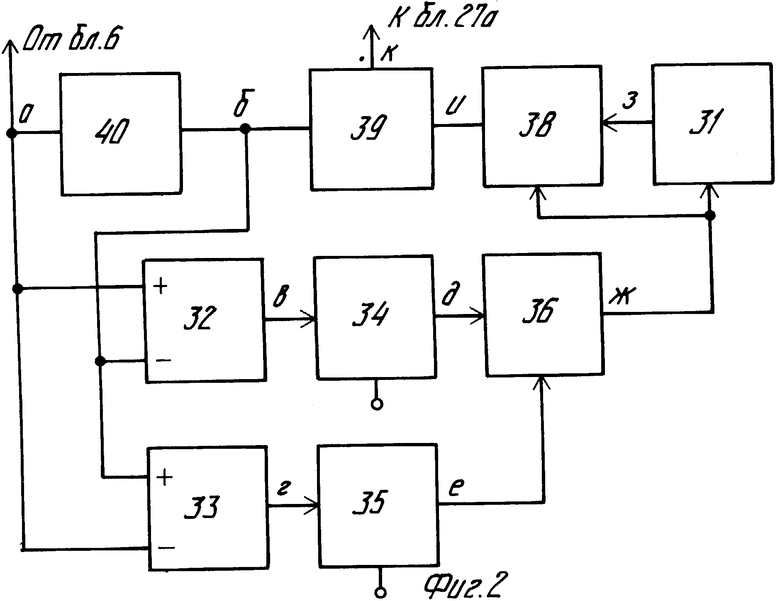
На фиг.2 представлена структурная схема блока селекции, где обозначено: 31 и 40 - второй и первый блок памяти, 32 и 33 - первый и второй разностные усилители, 34 и 35 - первый и второй компараторы, 36 - элемент ЛОГИЧЕСКОЕ ИЛИ, 39 - схемы формирования строба, 38 - элемент ЛОГИЧЕСКОЕ И.
На фиг. 3 приведены примеры изображения объекта и помеховой обстановки.
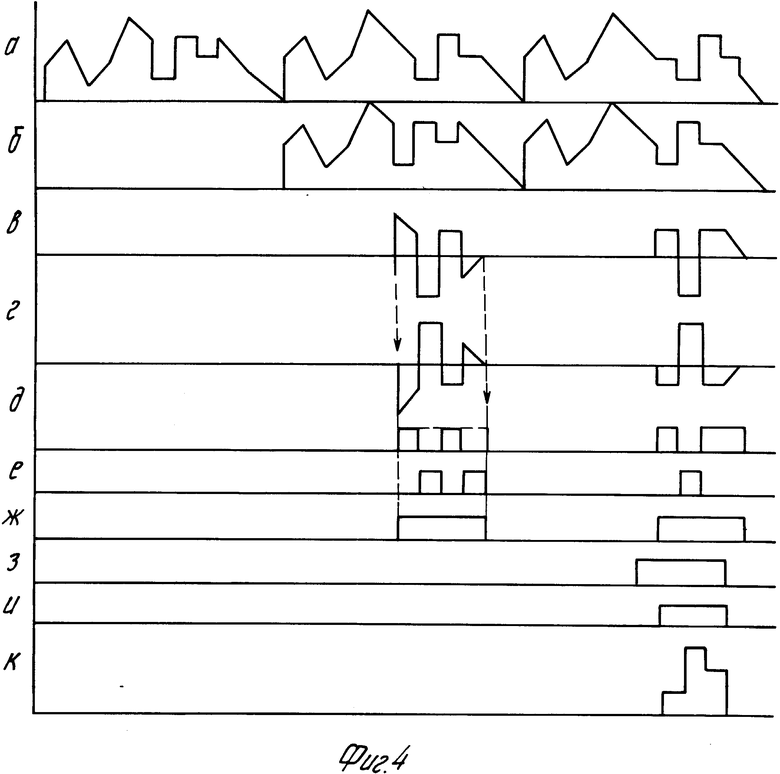
На фиг. 4 приведены эпюры напряжений, снимаемых с различных узлов блока селекции.
Корреляционно-экстремальный координатор цели работает следующим образом.
На фоточувствительной площадке первого ПВМС формируют текущее изображение эталонного объекта S(х,у) и фона g(х,у)
f(x,y)=S(x,y)+g(x,y). (1)
Первый ПВМС состоит из собственно оптически управляемого ПВМС (например, на основе электрооптического кристалла или жидкого кристалла, оптически сопряженного с электронно-оптическим преобразователем (ЭОП) 25 посредством, например, волоконно-оптической планшайбы 24, а также необходимых для функционального ЭОП и ПВМС блоков питания. При этом управление ПВМС 2 сводится к подаче с соответствующего (первого) выхода блока управления и синхронизации 21 управляющего низковольтного напряжения.
Излучение второго лазера 22 коллимируется и расширяется вторым расширителем 23 и поступает на первый ПВМС 2. На этом этапе на электрооптический модулятор 26 от блока 21 управляющее напряжение не подается, поэтому поляризация лазерного излучения не меняется (для определенности в плоскости чертежа фиг.1). После двухкратного прохождения через светомодулирующий слой 28 первого ПВМС 2 излучение, промодулированное по поляризации в соответствии с зарегистрированным изображением (1) попадает на поляризационный светоделитель 3, ориентированный таким образом, что пропускает излучение, поляризованное в плоскости чертежа. При этом на второе фотоприемное устройство 5 объективом переноса 4 фокусируют модулированное по амплитуде излучение второго лазера, преобразуемое в видеосигнал V(t). Распределение интенсивности излучения по светочувствительной площадке второго фотоприемного устройства пропорционально (1). После пороговой обработки в пороговом устройстве 6, реализованном на основе ключа, управляемого от блока 21, компаратора и стробирующего устройства, видеосигнал Vn(t), подвергнутый обработке вида
реализуемой в блоке 6, поступает на блок селекции 7. Блок селекции 7 реализует алгоритм селекции изображения объектов, основанный, например, на межкадровом вычитании. В этом случае блок селекции 7 содержит первый и второй блоки памяти 4 и 31 соответственно, реализованные, например, на основе матрицы ПЗС-структуры, работающей в режиме линии задержки, первый и второй разностные усилители 32 и 33, выходы которых соединены со входами первого и второго компараторов (34 и 35), выходы которых соединены с входами элемента ЛОГИЧЕСКОЕ ИЛИ 36, выход которого подключен к первому входу элемента ЛОГИЧЕСКОЕ И 38 и к входу второго блока памяти (31), выход которого подключен к второму входу элемента ЛОГИЧЕСКОЕ И, выход которого является управляющим входом схемы формирования строба 39, вход которой соединен с выходом первого блока памяти 4, а выход является выходом блока селекции, вход которого соединен с входами первого и второго разностных усилителей и с входом первого блока памяти (см. фиг.2). Блок селекции 7 функционирует следующим образом. Последовательно регистрируя три изображения объекта и фона, осуществляют их вычитание, выделяют область ненулевых значений разностных изобретений (на выходе блока 37), а путем сравнения областей разностного изображения, соответствующих первому и второму разностным изображением, выделяют их пересекающуюся область (на выходе элемента ЛОГИЧЕСКОЕ И), которая соответствует изображению селектируемого объекта на втором зарегистрированном изображении. На фиг.4 приведены эпюры напряжений, снимаемых с выходов блоков, поясняющие описанный выше алгоритм работы.
Последовательное формирование второго и третьего изображений на первом ПВМС 2 осуществляется аналогично формированию первого изображения синхронизированно с работой блоков 5, 6, 7, что обеспечивается наличием синхронизации в блоке 21 (связи синхронизации на фиг.1 не показаны).
После селекции объекта наблюдения (цели) изображение объекта (цели) поступает на электронный вход третьего ПВМС 27, реализованного, например, посредством высокояркостной трубки, оптически сопряженной с оптически управляемым ПВМС, аналогичным используемому в первом ПВМС 2 (структура: волоконно-оптическая планшайба, дихроичное диэлектрическое зеркало, прозрачный электрод, светомодулирующая среда - прозрачный электрод). Подавая на прозрачные электроды 3 управляющее напряжение по сигналу управления с блока 21, записывают на ПВМС изображение цели. Излучение первого лазера 9 через распределитель 10 поступает на светоделитель 11, который может представлять собой также, как и поляризационный светоделитель 3, поляризационный светоделитель, отражающий излучение с плоскостью поляризации, лежащей в плоскости чертежа (излучение первого лазера поляризовано в плоскости, наклонной к плоскости чертежа, причем угол наклона плоскости поляризации выбирается таким образом, чтобы обеспечить оптимальное для регистрации голограммы соотношение интенсивности опорного и предметного пучков в плоскости второго ПММС13). Отраженное от светоделителя 11 излучение, промодулированное по поляризации в соответствии с зарегистрированным на втором ПВМС 27 изображении при отражении от поляризационного светоделителя 3 оказывается промодулированным по амплитуде. С помощью первого Фурье-объектива 8 формируют на поверхности второго ПВМС 13, реализованного, например, на основе фототермопластического носителя, например ФТПН (при этом второй ПВМС 13 включает в состав собственно ПВМС на основе ФТПН с необходимыми блоками питания, управления и т.п.), распределение комплексных амплитуд  ≈ F{s(x,y)}, пропорциональное Фурье-спектру эталонного изображения.
≈ F{s(x,y)}, пропорциональное Фурье-спектру эталонного изображения.
На время записи голографического фильтра по сигналам с блока 21 открывают затвор 12, снимают управляющее напряжение с первого ПВМС 2 и подают на электрический модулятор 26 управляющее напряжение, вызывающее поворот плоскости поляризации излучения второго лазера на угол π/2. При этом излучение второго лазера отражается от поляризационного светоделителя 3. Одновременно с блока 21 на пороговое устройство 6 подается управляющий сигнал, отключающий блок селекции.
При открытом затворе 12 на втором ПВМС 13 формируется интерференционная картина и осуществляется запись согласованного фильтра аналогично прототипу. По окончании цикла записи согласованного фильтра затвор 12 закрывают, в плоскости первого фотоприемного устройства 15 формируют корреляционное поле К(х,у)
K(x,y) = ∫∫ S2(x1y1)S*(x+x1,y+y1)dx1dy1 (3)
Так как входное изображение на данном этапе работы совпадает с записанным в качестве согласованного фильтра S*(ωxωy) = F{S*(-x,-y)}, то в точке  = (х,у)=0 существует максимум корреляционного поля К(х,у). Величину этого максимума определяют в блоке определения максимума 16, на который поступает видеосигнал Vк(t) ≈ К(х,у) через коммутатор 17. Переключение коммутатора осуществляют по управляющему сигналу с блока 21. В блоке 16, реализуемом, например, на основе пикового детектора, определяют величину максимального значения видеосигнала Vк(t)
= (х,у)=0 существует максимум корреляционного поля К(х,у). Величину этого максимума определяют в блоке определения максимума 16, на который поступает видеосигнал Vк(t) ≈ К(х,у) через коммутатор 17. Переключение коммутатора осуществляют по управляющему сигналу с блока 21. В блоке 16, реализуемом, например, на основе пикового детектора, определяют величину максимального значения видеосигнала Vк(t)
Полученное значение максимума Vm умножают в усилителе 18 на коэффициент К<1.
По окончании цикла формирования корреляционного поля происходит переход координатора в режим определения координат: включаются управляющие сигналы на первый ПВМС 2, снимаются управляющие сигналы с третьего ПВМС 27. На управляющий вход коммутатора 17 подают управляющий сигнал с блока 21 для его обратного переключения. После этого переключения видеосигнал с выхода блока 15 будет поступать на вход управляемого порогового устройства 19, на управляющий вход которого поступает выходной сигнал усилителя 18.
Далее работа данного устройства не отличается от прототипа.
Излучение от объекта и фона фокусируют приемной оптической системой 1 на светочувствительной площадке первого ПВМС 2. Излучение второго лазера 22, расширенное вторым расширителем 23 и повернутое по поляризации на π/2 в электрооптическом модуляторе 26, модулируется в первом ПВМС 2 с соответствии с (1) по состоянию поляризации. В поляризационном светоделителе 3 модуляция по поляризации преобразуется в модуляцию по амплитуде. В плоскости второго ПВМС 13 с Фурье-объективом 8 формируют пространственное распределение амплитуд, пропорциональное
F{S(x+δx,y+δy)} + F{g(x,y)}, (4)
где δx,δy - смещение объекта.
Осуществляя фильтрацию (4) зарегистрированным согласованным фильтром S*(ωxωy) в плоскости первого фотоприемного устройства 15 имеет распределение комплексных амплитуд излучения, пропорциональное
После пороговой обработки в управляемом пороговом устройстве 19 фоновая составляющая 6 отсекается, так как в блоке 19 (реализованном на основе компаратора) видеосигнал V(t) ≈ К1(х,у) сравнивают с заранее установленным порогом h, адаптированным к величине полезного сигнала от объекта в соответствии с (3), т.е. осуществляют сравнение
Или (применительно к видеосигналу)
Видеосигнал Vв(t) с выхода блока 19, пропорциональный амплитуде корреляционного поля в окрестности вершины корреляционного пика, поступает в блок обработки, реализованный, например, на основе пикового детектора, функциональных преобразователей время-код (осуществляющих преобразование временной координаты видеосигнала в однозначно определяемые параметрами развертки ТВ растра пространственные координаты, выдаваемые на внешние устройства и в блок 21 в виде кода), а также компаратора и линии задержки.
Блок управления и синхронизации 21 представляет собой, например, микроЭВМ с устройствами сопряжения (аналого-цифровые и цифроаналоговые преобразователи) и с устройством синхронизации, реализующей программными средствами временную диаграмму работы координатора.
Повышение точности работы координатора по сравнению с известным обеспечивается уменьшением вероятности "ложной привязки" координатора к помехам за счет того, что запись (перезапись) эталона осуществляются в автоматическом режиме, при этом введение блока селекции и третьего ПВМС для формирования согласованного фильтра на эталонное изображение позволяет избежать ограничений по форме объекта, накладываемых в известном координаторе.
Повышение точности работы координатора обеспечивается также тем, что запись ГСФ осуществляется (независимо от уровня входной экспозиции изображения объекта S(х, у) на первом ПВМС 2 при оптимальных уровнях экспозиции второго ПВМС 13, так как для записи эталона используется третий ПВМС 27 и другой источник когерентного излучения (первый лазер 9).
Кроме того, вследствие более высокой чувствительности используемого ПВМС 2 предлагаемый координатор будет за счет более высокой чувствительности модульного ПВМС 2, сопряженного с ЭОПом, обеспечивать высокое отношение сигнал/шум при низких уровнях входной освещенности, при которых в известном координаторе формирование эталонного изображения затруднено (вследствие недопустимого уровня шумов).
Управляемое пороговое устройство позволяет выбирать величину порога, априорно обеспечивающего выделение автокорреляционного пика при подавлении ложных пиков взаимно корреляционных функций.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1988 |
|
RU2042155C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2081437C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| ОПТИЧЕСКАЯ НЕЙРОННАЯ СЕТЬ | 1990 |
|
RU2024940C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2050560C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| ДИНАМИЧЕСКИЙ ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 1991 |
|
RU2022326C1 |

Изобретение относится к оптической локации, в частности к системам информационного обеспечения высокоточных систем наведения лазерных локационных комплексов на подвижные объекты. Целью изобретения является повышение точности в условиях сложной помеховой обстановки. Цель достигается тем, что в известное устройство, содержащее первый Фурье-объектив 8, последовательно установленные на первой оптической оси приемную оптическую систему 1 и первый пространственно-временной модулятор света 2 (ПВМС), последовательно установленные на второй оптической оси первый лазер 9, первый расширитель 10, светоделитель 11, затвор 12, второй ПВМС 13, второй Фурье-объектив 14, первое фотоприемное устройство 15, а также пороговое устройство 6, блок обработки 2, блок управления и синхронизации 21, введены третий ПВМС 27, объектив переноса 4, электрооптический модулятор 26, поляризационный светоделитель 3, коммутатор 17, управляемое пороговое устройство 19, пиковый детектор 16, усилитель 18, блок селекции 7, высокояркостная телевизионная камера 27а, второй лазер 22 и второй расширитель 23. Кроме того, первый ПВМС выполнен в виде электронно-оптического преобразователя, сопряженного с ПВМС на основе электрооптического эффекта посредством волоконно-оптической планшайбы, на поверхность которой, обращенную к ПВМС, нанесено дихроичное диэлектрическое покрытие. 3 з.п. ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Василенко Г.И., Цибулькин Л.М | |||
| Голографические распознающие устройства | |||
| - М.: Радио и связь, 1985, с.291, 292 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПОЛИМЕРНАЯ КОМПОЗИЦИЯ | 1996 |
|
RU2130039C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
