Область техники, к которой относится изобретение
[01] Не имеющие ограничительного характера варианты осуществления настоящей технологии в целом относятся к способам и системам для прогнозирования погоды и, в частности, к способу и системе для формирования прогноза погоды с использованием алгоритма машинного обучения, выполняемого вычислительным устройством.
Уровень техники
[02] Прогнозирование погоды широко используется в различных ситуациях. Прогнозирование погоды может быть разделено на несколько категорий и/или видов в зависимости от его назначения. Сельскохозяйственные прогнозы включают в себя подробные прогнозы атмосферных осадков; морские и речные прогнозы включают в себя подробные прогнозы ветра, волнения, атмосферных явлений, температуры воздуха; авиационные прогнозы включают в себя подробные прогнозы ветра, видимости, атмосферных явлений, облачности, температуры воздуха; прогнозы общего назначения включают в себя гораздо более общие (т.е. более высокого уровня) прогнозы облачности, осадков, атмосферных явлений, ветра, температуры, влажности, атмосферного давления и т.д.
[03] Пользователь может получать текущий прогноз погоды для конкретной территории из различных источников, например, с использованием радиовещания, телевидения, сети Интернет, погодных приложений и т.д. Точность указания текущих погодных условий можно считать достаточно высокой, поскольку они основаны на реальных данных, полученных с метеостанций. Точность указания текущих погодных условий зависит от точности оборудования поставщика данных. В настоящее время Всемирная метеорологическая организация (ВМО) собирает метеорологические, климатологические, гидрологические и океанографические данные, а также данные морских наблюдений по всему миру с использованием более чем 15 спутников, 100 заякоренных буев, 600 дрейфующих буев, 3000 летательных аппаратов, 7300 судов и приблизительно 10000 наземных станций. Эти данные доступны государствам-членам ВМО.
[04] Пользователь также может получить данные, представляющие собой прогноз погодных условий для конкретного момента времени в будущем (позже текущего момента времени) для конкретной территории, из того же и/или из других источников. При этом точность прогноза зависит от срока прогнозирования (т.е. от заблаговременности прогноза), способа прогнозирования, территории и многих других критериев.
[05] Например, в зависимости от срока прогнозирования (соотношения момента времени формирования прогноза и момента времени в будущем, для которого формируется прогноз), прогноз можно классифицировать как очень краткосрочный прогноз (до 12 часов), краткосрочный прогноз (от 12 до 36 часов), среднесрочный прогноз (от 36 часов до 10 суток), долгосрочный прогноз (от 10 суток до сезона (3 месяца)) и очень долгосрочный прогноз (больше 3 месяцев (год, несколько лет)). В общем случае точность прогноза снижается по мере увеличения промежутка между моментом времени формирования прогноза и моментом времени, для которого сформирован этот прогноз. Например, точность (достоверность) очень краткосрочного прогноза может составлять 95-96%, краткосрочного прогноза - 85-95%, среднесрочного прогноза - 65-80%, долгосрочного прогноза - 60-65%, очень долгосрочного прогноза - не более 50%.
[06] Точность также зависит от способов прогнозирования, используемых для формирования прогноза. В настоящее время наиболее точными и наиболее надежными из всех известных способов прогнозирования обычно считаются численные модели прогнозирования погоды. Иными словами, способы прогнозирования, реализуемые вычислительными системами для прогнозирования погоды с использованием данных о текущих погодных условиях. Эти вычислительные системы способны использовать первичные данные, предоставленные метеозондами, метеорологическими спутниками и наземными метеостанциями.
[07] Даже в современном мире действия людей зависят от погодных условий вне их домов. На планы и действия значительной части населения влияют температура и осадки. Подобно древним людям, учитывавшим условия окружающей среды при планировании охоты, современные люди планируют свою повседневную деятельность с учетом вероятности дождя, облачности и других явлений, потенциально влияющих на такую деятельность.
[08] Эти потребности удовлетворяются различными службами прогнозирования погоды, сообщающими основные метеорологические параметры, такие как температура, интенсивность и вид осадков, облачность, влажность, давление, направление и скорость ветра. Эти службы предоставляют информацию о текущих метеорологических условиях, оперативный прогноз на срок до 2 часов, который называется «наукастинг» (nowcasting), среднесрочный прогноз на срок до 10 суток и долгосрочный прогноз погоды на несколько месяцев. Сервис Yandex.Weather представляет собой ведущего поставщика прогнозов погоды в России с приблизительно 5 миллионами активных пользователей в сутки и ежемесячной аудиторией, превышающей 24 миллиона уникальных пользователей, включая пользователей нескольких устройств, согласно оценке сервисом Yandex.Radar на декабрь 2018 г.
[09] Один из видов прогноза, предоставляемого службой поиска, представляет собой объединенные данные метеорадиолокатора и нейронной сети для сверхкраткосрочного прогнозирования осадков (известного как «наукастинг»), чтобы обеспечить подробную (с точностью до улицы или здания) карту прогнозируемых осадков в течение двух часов с 10-минутными интервалами. Качество такого прогноза позволяет предоставлять пользователям персонализированные понятные человеку уведомления, например, «в том месте, куда вы направляетесь, через полчаса начнется дождь, не забудьте зонтик».
[10] Данные с карты осадков также используются для корректировки текущих метеорологических условий (солнечно/облачно/дождь/снег и т.д.), отображаемых на основном веб-сайте Yandex.Weather. Партнеры сервиса Yandex.Weather, прежде всего главный портал Yandex.ru, служба Yandex.Maps и пользователи радио и телевидения, не имеющие непосредственного доступа к этому сервису, также полагаются на эти данные, что по меньшей мере вдвое увеличивает эффективную аудиторию продукта для наукастинга осадков Yandex.Weather.
[11] Очевидно, что концепция наукастинга обладает преимуществами по сравнению с традиционными способами прогнозирования погоды (т.е. традиционными способами прогнозирования погоды с использованием численного моделирования атмосферы), которые не могут определять точные места выпадения дождя (называемые областями выпадения осадков) для промежутков времени, необходимых для определения, например, той части города, где в течение следующего часа пройдет дождь. Кроме того, традиционный прогноз погоды обеспечивает информацию с разрешением один час, что затрудняет выявление интервалов без дождя в случае кратковременных сильных осадков.
[12] Кроме того, пользователям часто требуется прямой ответ на простой вопрос «когда начнется (или прекратится) дождь?». В идеальном случае ответ должен выглядеть так: «сильный дождь начнется чрез 10 минут и продлится 30 минут». Традиционные модели численного прогноза погоды (NWP, Numerical Weather Prediction) имеют ограничения на прогнозирование интенсивности выпадения осадков для конкретного места и для конкретного времени. В то же время результаты экстраполяции данных радиолокатора подходят для точного прогнозирования перемещения области выпадения осадков в течение ближайших нескольких часов, но не позволяют прогнозировать осадки на более длительный срок.
[13] Поэтому основная тенденция в современном наукастинге заключается в объединении данных радиолокатора с высокой разрешающей способностью с традиционными моделями NWP.
[14] В патентной заявке US2018313975 (CHEN, опубликована 1 ноября 2018 г.) описаны системы, способы и устройства, обеспечивающие объединенные результаты прогноза погоды, предназначенные для содействия руководителям работ при принятии оперативных решений относительно запланированного события или набора событий. Описан способ обработки метеорологических данных из различных источников и в различных форматах с различным пространственным и временным разрешением с целью формирования объединенного целостного результата прогнозирования погоды, непрерывного в пространственной и временной областях, применительно к запланированному событию или набору событий.
[15] В патентной заявке US2017357029 (LAKSHMANAN, опубликована 14 декабря 2017 г.) описан прием данных радиолокационных наблюдений для некоторых моментов времени входным слоем нейронной сети для прогнозирования интенсивности осадков. Радиолокационные наблюдения распространяются в прямом направлении через скрытые слои этой сети с целью определения интенсивностей осадков для этих моментов времени. Интенсивности осадков интегрируются в течение периода времени, определенного на основе этих моментов времени, для определения прогнозируемого количества осадков. Прогнозируемое количество осадков сравнивается с фактическим количеством осадков, определенным на основе полученных результатов измерений выпадения осадков, с целью определения ошибки. Если ошибка не удовлетворяет некоторым критериям, она пропорционально распределяется между этими моментами времени. Затем пропорционально распределенные ошибки распространяются в обратном направлении через скрытые слои и обновляют весовые коэффициенты, связанные с узлами в скрытых слоях. Данные наблюдений радиолокатора снова распространяются в прямом направлении через те же слои с умножением на обновленные весовые коэффициенты и используются для определения интенсивности новых осадков.
[16] В патентной заявке CN105445816A (опубликована 3 октября 2017 г.) описана система для объединения результатов обнаружения облаков радиолокатором и спутником. Способ объединения результатов обнаружения облаков радиолокатором и спутником включает в себя: получение высот верхней границы облаков, высот нижней границы облаков и средних коэффициентов отражения, определенных радиолокатором миллиметрового диапазона для обнаружения облаков; получение данных яркостной температуры для картины распределения облачности со спутника, соответствующей верхней границе облаков, определенной радиолокатором миллиметрового диапазона для обнаружения облаков; обработку обученной нейронной сетью яркостных температур, полученных со спутника, а также высот верхней границы облаков, высот нижней границы облаков и средних коэффициентов отражения, определенных радиолокатором миллиметрового диапазона для обнаружения облаков, с целью выдачи в реальном времени высот верхней границы облаков, высот нижней границы облаков и средних коэффициентов отражения, соответствующих значениям яркостной температуры, для формирования спутниковых изображений, содержащих данные о высоте верхней границы облаков, высоте нижней границы облаков и средних коэффициентах отражения, и для получения прогнозов с целью анализа прогнозов погоды, численного прогнозирования и научных исследований атмосферы.
Раскрытие изобретения
[17] Как обнаружили разработчики настоящей технологии, несмотря на то, что разработанные до настоящего времени способы наукастинга и обеспечивают лучший или более точный или более предметный прогноз по сравнению с традиционными моделями NWP, им все же присущи технические недостатки.
[18] Например, модель осадков на основе данных радиолокатора ограничивается местоположением радиолокаторов и поэтому плохо масштабируется. Радиолокаторы представляют собой дорогостоящее оборудование, их установка зависит от соглашений с местными властями и населением, а для их эксплуатации требуется обученный обслуживающий персонал.
[19] Например, в России особенно плохое покрытие вызвано большими размерами страны, крайне неравномерным распределением населения и отсутствием во многих удаленных регионах инфраструктуры для эксплуатации радиолокационного комплекса. Подобные проблемы существуют во многих развивающихся странах с большим населением, нуждающимся в метеорологической информации, но не располагающих инфраструктурой для поддержки радиолокационных сетей.
[20] Поэтому разработчики настоящей технологии разработали системы и способы наукастинга осадков на основе сочетания спутниковых снимков и моделей NWP. В целом, в не имеющих ограничительного характера вариантах осуществления настоящей технологии используются области выпадения осадков, полученные из данных радиолокаторов и спутника, а затем формируются прогнозы наукастинга для значительно большей территории с использованием той же или подобной модели для прогнозирования. Иными словами, не имеющие ограничительного характера варианты осуществления настоящей технологии позволяют либо дополнять радиолокационные данные прогнозами, выполненными алгоритмом машинного обучения на основе спутниковых изображений, либо использовать спутниковые изображения для формирования синтезированных радиолокационных данных (таких как трехмерные карты осадков) для областей, где такие радиолокационные данные недоступны.
[21] В частности, не имеющие ограничительного характера варианты осуществления настоящей технологии относятся к формированию прогноза на основе наукастинга. Здесь термин «наукастинг» используется для обозначения прогноза погоды, включая прогноз осадков, сформированного для текущего времени, например, для интервала времени, включающего в себя 2 предыдущих часа и 2 следующих часа относительно момента времени формирования прогноза. Разумеется, срок прогноза может быть больше или меньше приведенного в качестве примера значения ±2 часа.
[22] Основная техническая проблема, связанная с известными подходами к наукастингу, заключается в том, что он основан на данных метеорадиолокаторов, обладающих высокой точностью, но не одинаково доступных для всех территорий.
[23] Метеорадиолокаторы устанавливаются только в городах с большим населением, а в средних и малых городах метеорадиолокаторы отсутствуют. Покрытие по горизонтали каждого метеорадиолокатора составляет 200-250 км. Обычно установленные в крупных городах радиолокаторы не обеспечивают покрытия территории городов с небольшим населением. Например, в России покрытие метеорадиолокаторами обеспечено только для приблизительно 40% заселенной территории.
[24] Другая связанная с метеорадиолокаторами проблема заключается в зонах затенения, где работа метеорадиолокаторов невозможна. Очевидно, что на радиолокационных картах имеются так называемые «слепые зоны» - секторы, недоступные для сканирования радиолокатором из-за окружающих зданий или других непрозрачных для радиоволн препятствий.
[25] Не имеющие ограничительного характера варианты осуществления настоящей технологии преследуют цель решить по меньшей мере некоторые из описанных выше технических проблем с помощью способов, использующих данные метеорадиолокатора и спутниковые данные. В общем случае, соответствующий не имеющим ограничительного характера вариантам осуществления настоящей технологии способ может быть разделен на несколько этапов, выполняемых электронным устройством.
[26] Сбор данных от метеорадиолокаторов
[27] Как и в случае любого радиолокатора, анализ данных метеорадиолокатора основан на эффекте Доплера. Метеорадиолокатор через каждые 10 минут излучает радиоволны, которые отражаются окружающей средой, включая крупные капли воды. Отраженная таким образом волна в виде радиочастотного эхо-сигнала возвращается к метеорадиолокатору. Радиочастотный эхо-сигнал представляет собой отражение, а связанные с ним данные радиальной скорости содержат информацию об окружающей среде, включая местоположение капель воды и их плотность.
[28] На основе радиочастотного эхо-сигнала метеорадиолокатор формирует трехмерную (3D) карту осадков, которая описывает атмосферу в диапазоне дальности 200-250 км по горизонтали и 10 км по вертикали.
[29] На 3D-карте осадков изображаются области с крупными каплями воды (крупнее 50 мкм). Насыщенность и цвет используются, чтобы представить плотность капель воды. Чем насыщенней цвет, тем выше вероятность осадков. На карте осадков каждый пиксел изображения соответствует участку размером 2×2 км фактического ландшафта. Иными словами, 3D-карта позволяет прогнозировать осадки с точностью до 2×2 км.
[30] На этом шаге метеорадиолокатор собирает множество последовательных 3D-карт осадков и передает их для дальнейшей обработки электронному устройству.
[31] Формирование обучающего набора данных для наукастинга с использованием метеорадиолокатора
[32] Обучающий набор данных содержит множество обучающих выборок для первого алгоритма машинного обучения (MLA, Machine Learning Algorithm), такого как первая нейронная сеть (NN, Neural Network).
[33] Каждая обучающая выборка включает в себя входные данные (т.е. обучающий объект) и метку или целевые данные. Входные данные представляют собой шесть 3D-карт осадков, сформированных через каждые 10 минут. Целевые данные представляют собой седьмую 3D-карту, следующую непосредственно за последовательностью из этих шести 3D-карт осадков. Иными словами, каждая последовательность из шести 3D-карт помечена седьмой 3D-картой.
[34] Обучение первого алгоритма MLA с использованием набора данных метеорадиолокатора
[35] Обучающий набор данных используется для обучения первого алгоритма MLA, чтобы формировать прогнозную следующую 3D-карту на основе предыдущих шести 3D-карт.
[36] В общем случае можно сказать, что первый алгоритм MLA обучается прогнозировать следующее состояние на основе «тенденции», выявленной для этих 3D-карт. Иными словами, первый алгоритм MLA обучен прогнозировать будущее состояние (т.е. формировать седьмую 3D-карту) на основе тенденций в прошлом (в предыдущих шести 3D-картах).
[37] В частности, первый алгоритм MLA может обеспечиваться последовательностью из шести 3D-карт осадков в качестве входных данных и седьмой 3D-картой атмосферы в качестве целевых данных. Процесс обучения может быть реализован с использованием любого подходящего алгоритма обратного распространения.
[38] Формирование прогноза с использованием обученного первого алгоритма MLA
[39] На основе последовательности из шести карт осадков первый алгоритм MLA прогнозирует следующую седьмую 3D-карту осадков. Прогнозирующая способность может, например, составлять 2 часа с интервалами 10 минут.
[40] Первый алгоритм MLA формирует признаки входных 3D-карт осадков в нескольких последовательных слоях первого алгоритма MLA. Каждый сверточный слой первого алгоритма MLA содержит несколько фильтров, применяемых к введенным 3D-картам осадков. Каждый фильтр извлекает признак 3D-карт осадков. Выходные данные первого алгоритма MLA объединяют извлеченные признаки для формирования прогнозной седьмой 3D-карты осадков.
[41] На 3D-карте осадков представлен прогноз вероятности осадков. Более насыщенный цвет на прогнозной седьмой 3D-карте осадков соответствует большей вероятности выпадения дождя в отмеченном месте. На такой созданной 3D-карте осадков для каждого участка размером 2×2 км оценивается вероятность осадков, которая, например, может быть в диапазоне от 0 до 1.
[42] Использование прогноза радиолокационных данных для обучения второго алгоритма MLA для формирования 3D-карт осадков на основе спутниковых данных
[43] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии для дополнения наукастинга на основе данных метеорадиолокатора используются спутниковые данные.
[44] Для получения спутниковых данных может использоваться спутник Meteosat-8. Разумеется, что в качестве источника спутниковых данных могут использоваться и другие спутники.
[45] Очевидно, что спутник перемещается вокруг Земли с соответствующей скоростью так, чтобы его положение относительно Земли не изменялось (т.е. чтобы спутник находится на геостационарной орбите). Обычно спутники находятся над Индийским океаном на 41-м градусе долготы. Спутник способен фиксировать фотографию через каждые 15 минут. Каждая фотография содержит информацию из 12 каналов: 11 каналов в видимом и инфракрасном диапазонах с пространственным разрешением 3×3 км и 1 визуальный канал с пространственным разрешением 1×1 км.
[46] Например, каждая фотография имеет разрешение 3712×3712 пикселов или 14 мегапикселов.
[47] В дополнение к спутниковым фотографиям могут собираться данные глобальной системы прогнозирования (GFS, Global Forecast System). Кроме того, могут выполняться расчеты положения солнца относительно горизонта. Дополнительно возможно получение информации о ландшафте.
[48] Формирование обучающего набора данных на основе спутниковых фотографий
[49] Затем электронное устройство формирует обучающий набор данных для наукастинга на основе спутниковых данных, содержащий обучающий объект (т.е. входные данные) и целевые данные.
[50] Например, обучающий объект может содержать: 11 слоев фотографий, сделанных со спутника; 1 слой топографической информации о соответствующем ландшафте; 1 слой, представляющий высоту солнца над горизонтом; 7 слоев метеорологических данных, собранных системой GFS.
[51] В качестве целевых данных (т.е. метки для обучения) используются 3D-карты осадков, сформированные первым алгоритмом MLA. Каждая 3D-карта осадков имеет сетку с размером ячейки 2×2 км. Для каждого участка размером 2×2 км на 3D-карте имеется прогноз вероятности осадков.
[52] Следует отметить, что прогноз вероятности осадков для каждого участка размером 2×2 км сформирован с использованием описанного выше наукастинга на основе информации метеорадиолокатора и может быть в диапазоне от 0 до 1.
[53] Обучение второго алгоритма MLA с использованием обучающего набора данных, содержащего спутниковые фотографии
[54] Описанный выше сформированный обучающий набор данных подается в качестве входных данных во второй алгоритм MLA, такой как вторая сеть NN. Для обучения второго алгоритма MLA в качестве целевых данных предоставляется 3D-карта осадков. Алгоритм обратного распространения может применяться так, чтобы отклонение результатов расчетов сети NN от целевых данных использовалось в качестве ошибки. Ошибка возвращается к весовым коэффициентам сети NN и эти весовые коэффициенты корректируются на основе этой ошибки. Обратное распространение итеративно повторяется, пока ошибка не будет сведена к минимуму.
[55] Может использоваться вторая сеть NN с архитектурой U-net. Архитектура U-net позволяет рассчитывать вероятность осадков одновременно для всех 3D-карт.
[56] Формирование прогноза с использованием второго алгоритма MLA
[57] Затем обученный второй алгоритм MLA формирует данные для прогноза.
[58] В частности, обученная сеть NN с архитектурой U-net принимает входные данные (спутниковые фотографии некоторого географического региона) и формирует 3D-карту осадков, указывающую вероятность выпадения осадков на каждом участке 3D-карты размером 2×2 км. Иными словами, обученный второй алгоритм MLA способен формировать 3D-карту осадков для области, где радиолокационные данные недоступны, или дополнительные данные для области 3D-карт низкого качества.
[59] Таким образом, можно сказать, что преимущество не имеющих ограничительного характера вариантов осуществления настоящей технологии связано с доступностью спутниковых данных для всей территории. Обученный второй алгоритм MLA может использоваться для формирования 3D-карт осадков для областей, где радиолокационные данные недоступны (или имеют низкое качество), чтобы обеспечить формирование прогнозов наукастинга.
[60] Сформированные таким образом 3D-карты осадков могут использоваться совместно с прогнозирующими алгоритмами общего назначения (такими как описанная выше модель NWP) с целью формирования окончательного прогноза погоды, возможно, повышенного качества (например, более точного или более предметного для конкретной географической области).
[61] Таким образом, можно сказать, что не имеющие ограничительного характера варианты осуществления настоящей технологии формируют на основе данных метеорадиолокатора и спутниковых фотографий прогноз для данной территории, включающий в себя вероятность осадков.
[62] Формирование прогноза на основе спутниковых данных для будущего периода времени
[63] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии может быть сформирован прогноз для будущего периода времени (например, на следующие два часа и далее). В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии этот прогноз для будущего периода времени основан на описанных выше прогнозах, сформированных первым алгоритмом MLA и вторым алгоритмом MLA.
[64] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии для формирования прогноза для будущего периода времени дополнительно формируются синтезированные 3D-карты осадков для этого периода времени или синтезированные спутниковые фотографии для этого периода времени. Эта синтезированная информация используется в качестве входных данных для сети NN.
[65] Для формирования синтезированных 3D-карт осадков может использоваться технология оптического потока. Концепция оптического потока используется в компьютерном зрении для обнаружения сдвигов между изображениями. Алгоритм оптического потока включает в себя анализ последовательности изображений и обнаружение поля векторов сдвига в каждой точке изображения. На основе предыдущего изображения и обнаруженного поля векторов сдвига алгоритм оптического потока формирует следующее изображение. Сформированное следующее изображение представляет следующую карту осадков для ближайших 15 минут.
[66] Аналогичный по сути подход может использоваться и для формирования синтезированных спутниковых фотографий.
[67] В некоторых дополнительных не имеющих ограничительного характера вариантах осуществления изобретения алгоритм оптического потока может использоваться для выравнивания временных интервалов различных прогнозирующих моделей. Например, когда данные метеорадиолокатора фиксируются с интервалом X минут, а спутниковые данные фиксируются с другим интервалом Y минут, алгоритм оптического потока может использоваться, чтобы сформировать синтетические данные для одного или нескольких наборов данных метеорадиолокатора и спутника с целью приведения их к единому временному интервалу фиксации.
[68] В частности, 3D-карта на основе данных метеорадиолокатора обычно формируется через каждые 10 минут, а 3D-карта на основе спутниковых данных формируется с 15-минутными интервалами. Для устранения этой проблемы может использоваться программное обеспечение Optical Flow (Оптический поток) с открытым исходным кодом. Алгоритм оптического потока позволяет добавлять отсутствующие изображения в последовательность изменяющихся фотографий.
[69] Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии формирование прогноза наукастинга включает в себя дополнение прогноза на основе спутниковых данных. Сверхкраткосрочные прогнозы, сформированные на основе радиолокационных данных, имеют ограниченное покрытие с точки зрения территории, а для прогнозов на основе спутниковых данных такие ограничения отсутствуют. С целью покрытия большей территории в рамках прогноза 3D-карта, сформированная сетью NN, обученной на данных метеорадиолокаторов, объединяется с 3D-картой осадков, сформированной сетью NN, обученной на основе спутниковых данных.
[70] Таким образом, в соответствии с первым аспектом настоящей технологии разработан выполняемый сервером способ формирования прогноза погоды. Сервер содержит процессор, способный выполнять алгоритм MLA. Способ включает в себя: прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала этого периода времени; прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени; формирование алгоритмом MLA на основе спутниковых данных дополнительной 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за данным периодом времени; формирование алгоритмом MLA прогноза погоды для данного периода времени на основе заранее заданного количества последовательных 3D-карт осадков и дополнительной следующей 3D-карты осадков.
[71] В некоторых не имеющих ограничительного характера вариантах осуществления способа прогноз погоды представляет собой прогноз наукастинга.
[72] В некоторых не имеющих ограничительного характера вариантах осуществления способа прогноз наукастинга имеет очень короткий срок прогноза.
[73] В некоторых не имеющих ограничительного характера вариантах осуществления способа очень короткий срок прогноза находится в пределах двухчасового периода времени.
[74] В некоторых не имеющих ограничительного характера вариантах осуществления способа формирование прогноза погоды дополнительно включает в себя формирование прогноза погоды для будущего периода времени, следующим за данным периодом времени.
[75] В некоторых не имеющих ограничительного характера вариантах осуществления способа формирование дополнительной следующей 3D-карты включает в себя применение технологии оптического потока.
[76] В некоторых не имеющих ограничительного характера вариантах осуществления способа технология оптического потока обеспечивает формирование будущих 3D-карт осадков на основе заранее заданного количества последовательных 3D-карт осадков и/или формирование будущих спутниковых данных на основе спутниковых данных.
[77] В некоторых не имеющих ограничительного характера вариантах осуществления способа формирование алгоритмом MLA прогноза погоды для данного периода времени осуществляется для географического региона прогноза, который шире данного географического региона.
[78] В некоторых не имеющих ограничительного характера вариантах осуществления способа алгоритм MLA включает в себя первый алгоритм MLA и второй алгоритм MLA.
[79] В некоторых не имеющих ограничительного характера вариантах осуществления способа первый алгоритм MLA способен формировать прогнозную дополнительную следующую 3D-карту на основе заранее заданного количества последовательных 3D-карт осадков.
[80] В некоторых не имеющих ограничительного характера вариантах осуществления способа это заранее заданное количество равно шести.
[81] В некоторых не имеющих ограничительного характера вариантах осуществления способа первый алгоритм MLA представляет собой сеть NN.
[82] В некоторых не имеющих ограничительного характера вариантах осуществления способа второй алгоритм MLA способен формировать прогнозную дополнительную следующую 3D-карту осадков на основе спутниковых данных.
[83] В некоторых не имеющих ограничительного характера вариантах осуществления способа второй алгоритм MLA представляет собой сеть NN.
[84] В некоторых не имеющих ограничительного характера вариантах осуществления способа сеть NN содержит сеть NN с архитектурой U-net.
[85] В некоторых не имеющих ограничительного характера вариантах осуществления способ дополнительно включает в себя обучение второго алгоритма MLA на основе обучающего набора, содержащего обучающий объект и обучающую метку, при этом обучающий объект содержит спутниковые данные, а обучающая метка содержит результат прогноза от первого алгоритма MLA, представляющий собой дополнительную следующую 3D-карту.
[86] В некоторых не имеющих ограничительного характера вариантах осуществления способа спутниковые данные содержат: множество слоев фотографий, сделанных со спутника; слой топографической информации; слой, представляющий высоту солнца над горизонтом; множество слоев метеорологических данных, собранных системой GFS.
[87] В соответствии с другим аспектом настоящей технологии разработан выполняемый сервером способ формирования прогноза погоды. Сервер содержит процессор, способный выполнять алгоритм MLA. Способ включает в себя: прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, зафиксированные до начала данного периода времени; прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени; формирование алгоритмом MLA на основе спутниковых данных дополнительных данных, представляющих собой прогнозируемые метеорологические данные для другого географического региона, который по меньшей мере частично отличается от данного географического региона, и/или для периода времени, следующего за данным периодом времени; формирование алгоритмом MLA прогноза погоды на основе данных метеорадиолокатора и дополнительных данных.
[88] В некоторых не имеющих ограничительного характера вариантах осуществления способа прогноз погоды предназначен для данного периода времени, или для периода времени, следующего за данным периодом времени, или для данного географического региона, или для другого географического региона.
[89] В соответствии с другим аспектом настоящей технологии разработан способ формирования прогноза погоды, выполняемый сервером, содержащим процессор. Процессор способен выполнять алгоритм MLA. Способ включает в себя: прием алгоритмом MLA в течение некоторого периода времени спутниковых данных для некоторого географического региона; формирование алгоритмом MLA на основе спутниковых данных 3D-карты осадков для данного географического региона; формирование алгоритмом MLA на основе 3D-карты осадков прогноза погоды для данного периода времени и данного географического региона.
[90] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии алгоритм MLA представляет собой первый алгоритм MLA, а способ дополнительно включает в себя обучение первого алгоритма MLA путем выполнения следующих действий: прием вторым алгоритмом MLA в течение периода времени обучения указания на данные метеорадиолокатора для обучающего географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени; формирование вторым алгоритмом MLA прогнозной дополнительной 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за периодом времени обучения; прием первым алгоритмом MLA в течение данного периода времени спутниковых данных для обучающего географического региона; обучение первого алгоритма MLA на основе спутниковых данных для формирования прогнозной 3D-карты осадков путем предоставления первому алгоритму MLA обучающего набора, содержащего спутниковые данные в качестве обучающего объекта и сформированную вторым алгоритмом MLA прогнозную дополнительную следующую 3D-карту осадков в качестве целевых данных.
[91] В контексте настоящего описания термин «сервер» означает компьютерную программу, выполняемую соответствующими аппаратными средствами и способную принимать запросы (например, от электронных устройств) через сеть и выполнять эти запросы или инициировать их выполнение. Аппаратные средства могут представлять собой один физический компьютер или одну компьютерную систему, что не существенно для настоящей технологии. В настоящем контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая определенная задача принимается, выполняется или запускается одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или инициировать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[92] В контексте настоящего описания термин «электронное устройство» (или «компьютерное устройство») означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что в данном контексте устройство, функционирующее как электронное устройство, также может функционировать как сервер в отношении других электронных устройств. Использование выражения «электронное устройство» не исключает использования нескольких электронных устройств для приема, отправки, выполнения или инициирования выполнения любой задачи или запроса либо результатов любых задач или запросов, либо шагов любого описанного здесь способа.
[93] В этом контексте порядковые числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между соответствующими существительными, но не для описания какого-либо определенного вида взаимосвязи между ними.
[94] В контексте настоящего описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или обеспечения их использования иным способом. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или множество серверов.
[95] В контексте настоящего описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Таким образом, информация включает в себя аудиовизуальные произведения (изображения, фильмы, звукозаписи, презентации и т.д.), данные (данные о местоположении, числовые данные и т.д.), текст (описания, рекламные объявления, сообщения и т.д.), документы, электронные таблицы и т.д., но не ограничивается ими.
[96] В контексте настоящего описания, если явно не указано другое, в качестве указания на цифровой объект может выступать сам цифровой объект, а также указатель, ссылка, гиперссылка или другое косвенное средство, с помощью которого получатель указания может найти место в сети, памяти, базе данных или другой пригодной для чтения компьютером среде, откуда можно извлечь этот цифровой объект. Например, указание на документ может включать в себя сам документ (т.е. его содержимое) или это указание может представлять собой уникальный дескриптор документа, указывающий на файл в определенной файловой системе, или на какие-либо другие средства для указания получателю данных места в сети, адреса памяти, таблицы в базе данных или другого места, где можно получить доступ к файлу. Специалисту в данной области должно быть очевидно, что степень точности, требуемая для такого указания, зависит от объема предварительных пояснений относительно интерпретации информации, которой обмениваются отправитель и получатель данных. Например, если перед началом обмена данными между отправителем и получателем известно, что указание на цифровой объект представляет собой ключ базы данных для элемента в определенной таблице заранее заданной базы данных, содержащей этот цифровой объект, то для эффективной передачи такого цифрового объекта получателю достаточно оправить этот ключ базы данных, даже если сам цифровой объект не передается между отправителем и получателем данных.
[97] В контексте настоящего описания термин «местоположение объекта» означает местоположение географического объекта, т.е. конкретного региона, города, области, аэропорта, железнодорожной станции и т.д. Конкретные географические координаты, например, данные геолокации, которые могут быть приняты сервером от электронного устройства по сети связи, также могут использоваться в качестве местоположения объекта.
[98] В контексте настоящего описания выражение «устройство хранения данных» означает носители любого рода и вида, включая ОЗУ, ПЗУ, диски (CD-ROM, DVD, гибкие диски, жесткие диски и т.д.), USB-накопители, твердотельные накопители, накопители на магнитных лентах и т.д.
[99] Каждый вариант реализации настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов.
[100] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, в приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[101] Дальнейшее описание приведено для лучшего понимания настоящей технологии, а также других аспектов и их признаков, и должно использоваться совместно с приложенными чертежами.
[102] На фиг. 1 представлена схема системы, реализованной согласно вариантам осуществления настоящей технологии, не имеющим ограничительного характера.
[103] На фиг. 2 приведена схема работы первого алгоритма машинного обучения, выполняемого сервером системы, представленной на фиг. 1.
[104] На фиг. 3 приведена схема работы второго алгоритма машинного обучения, выполняемого сервером системы, представленной на фиг. 1.
[105] На фиг. 4 приведена блок-схема способа формирования прогноза погоды, соответствующего не имеющим ограничительного характера вариантам осуществления настоящей технологии и выполняемого сервером в представленной на фиг. 1 системе.
[106] На фиг. 5 приведена блок-схема способа формирования прогноза погоды, соответствующего дополнительным не имеющим ограничительного характера вариантам осуществления настоящей технологии и выполняемого сервером в представленной на фиг. 1 системе.
[107] На фиг. 6 приведена блок-схема способа формирования прогноза погоды, соответствующего другим дополнительным не имеющим ограничительного характера вариантам осуществления настоящей технологии и выполняемого сервером в представленной на фиг. 1 системе.
Осуществление изобретения
[108] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, но не для ограничения ее объема до таких специально приведенных примеров и условий.
[109] Кроме того, чтобы способствовать лучшему пониманию, следующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалисту в данной области должно быть понятно, что различные варианты осуществления данной технологии могут быть значительно сложнее.
[110] В некоторых случаях также приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объема или границ данной технологии. Представленный перечень модификаций не составляет исчерпывающего перечня и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что это описание содержит единственный вариант реализации того или иного элемента настоящей технологии.
[111] На фиг. 1 приведена схема компьютерной системы 100. Должно быть однозначно понятно, что компьютерная система 100 представляет собой только один возможный вариант осуществления настоящей технологии. В некоторых случаях также приводятся полезные примеры модификаций компьютерной системы 100. Это описание не предназначено для определения объема или границ настоящей технологии. В некоторых случаях также приводятся полезные примеры модификаций компьютерной системы 100. Они способствуют пониманию, но также не определяют объема или границ данной технологии. Эти модификации не составляют исчерпывающего перечня. Как понятно специалисту в данной области, вероятно, возможны и другие модификации. Кроме того, следует понимать, что компьютерная система 100 в некоторых случаях может представлять собой упрощенную реализацию настоящей технологии, и что такие варианты представлены для того, чтобы способствовать лучшему ее пониманию. Специалисту в данной области должно быть понятно, что различные варианты осуществления данной технологии могут быть значительно сложнее.
[112] Компьютерная система 100 содержит электронное устройство 102. Электронное устройство 102 взаимодействует с пользователем 104 и иногда может называться «клиентским устройством». Следует отметить, что связь электронного устройства 102 с пользователем 104 не означает необходимости указывать или предполагать какой-либо режим работы, например, вход в систему, регистрацию и т.п.
[113] В контексте настоящего описания, если явно не указано другое, термин «электронное устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения данной задачи. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты. Следует отметить, что в данном контексте устройство, функционирующее как электронное устройство, также может функционировать как сервер в отношении других электронных устройств. Использование выражения «электронное устройство» не исключает использования нескольких электронных устройств для приема, отправки, выполнения или инициирования выполнения любой задачи или запроса либо результатов любых задач или запросов, либо шагов любого описанного здесь способа.
[114] Электронное устройство 102 содержит энергонезависимое ЗУ 106. Энергонезависимое ЗУ 106 может содержать один или несколько носителей информации и в общем случае обеспечивает пространство для хранения выполняемых компьютером команд, которые выполняются процессором 108. Например, энергонезависимое ЗУ 106 может реализовываться как пригодная для чтения компьютером среда, включая ПЗУ, жесткие диски (HDD), твердотельные накопители (SSD) и карты флэш-памяти.
[115] Электронное устройство 102 содержит аппаратные средства и/или программное обеспечение и/или встроенное программное обеспечение (либо их сочетание) для выполнения погодного приложения 110. В общем случае погодное приложение 110 может активироваться без использования рук в ответ на одно ли несколько активизирующих слов и способно выполнять задачи или предоставлять услуги в ответ на команды, принятые от пользователя 104. Например, погодное приложение 110 может быть реализовано в виде приложения Yandex.Weather (предоставляется компанией Yandex LLC, ул. Льва Толстого, 16, Москва, 119021, Россия). В качестве альтернативы, погодное приложение 110 может быть реализовано в виде браузерного приложения, где пользователь 104 осуществляет доступ к погодному порталу или другой службе погоды, чтобы получить прогноз погоды. Например, погодный портал может быть связан с новостным агентством или с другим поставщиком услуг прогнозирования погоды. В качестве альтернативы или дополнительно, погодное приложение 110 может представлять собой «родное приложение» электронного устройства. Например, в некоторых вариантах осуществления настоящей технологии, где электронное устройство 102 реализовано в виде смартфона, такого как смартфон марки Apple, погодное приложение 110 может быть реализовано в виде приложения Weather, предоставляемого операционной системой (iOS) электронного устройства 102.
[116] Электронное устройство 102 связано с сервером 114 через сеть 112 связи.
[117] Сервер 114 может быть реализован в виде традиционного компьютерного сервера. В примере осуществления настоящей технологии сервер 114 может быть реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™. Очевидно, что сервер 114 может быть реализован с использованием любых других подходящих аппаратных средств и/или прикладного программного обеспечения и/или встроенного программного обеспечения, либо их сочетания. В этом не имеющем ограничительного характера варианте осуществления настоящей технологии сервер 114 реализован в виде одного сервера. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии функции сервера 114 могут быть распределены между несколькими серверами.
[118] Реализация сервера 114 хорошо известна. Вкратце, сервер 114 содержит интерфейс связи (не показан), структура и настройки которого позволяют осуществлять связь с различными элементами через сеть 112 связи. Сервер 114 также содержит по меньшей мере один процессор 116, связанный с интерфейсом связи, структура и настройки которого позволяют выполнять различные описанные в настоящем документе процессы.
[119] С сетью 112 связи также связаны источник 118 метеорологических данных и источник 120 спутниковых данных.
[120] В общем случае источник 118 метеорологических данных способен передавать серверу 114 указание на данные 126 метеорадиолокатора для некоторого географического региона. Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии данные 126 метеорадиолокатора могут быть представлены в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала заданного периода времени. Заранее заданное количество последовательных 3D-карт осадков может быть равно шести.
[121] Источник 118 метеорологических данных может формировать данные 126 метеорадиолокатора на основе показаний метеорадиолокатора (не показан). Как описано выше, источник 118 метеорологических данных может принимать данные от метеорадиолокатора, который сформировал метеорологические данные с использованием анализа результатов наблюдений метеорадиолокатора, основанного на эффекте Доплера. Метеорадиолокатор через каждые 10 минут излучает радиоволны, которые отражаются окружающей средой, включая крупные капли воды. Отраженная таким образом волна в виде радиочастотного эхо-сигнала возвращается к метеорадиолокатору. Радиочастотный эхо-сигнал представляет собой отражение, а связанные с ним данные радиальной скорости содержат информацию об окружающей среде, включая местоположение капель воды и их плотность. На основе радиочастотного эхо-сигнала метеорадиолокатор формирует трехмерную (3D) карту осадков, описывающую атмосферу в диапазоне дальности 200-250 км по горизонтали и 10 км по вертикали.
[122] На 3D-карте осадков изображаются области с крупными каплями воды (крупнее 50 мкм). Насыщенность и цвет используются для представления плотности капель воды. Чем насыщенней цвет, тем выше вероятность осадков. На 3D-карте осадков каждый пиксел изображения соответствует участку размером 2×2 км фактического ландшафта. Иными словами, 3D-карта осадков позволяет прогнозировать осадки с точностью до 2×2 км.
[123] Источник 120 спутниковых данных способен передавать серверу 114 указание на спутниковые данные 128 для заданного географического региона. Источник 120 спутниковых данных формирует спутниковые данные 128 на основе сигналов 124, принятых от спутника 122.
[124] В некоторых вариантах осуществления настоящей технологии спутник 122 может представлять собой геостационарный спутник. Как описано выше, спутник 122 может представлять собой спутник, который перемещается вокруг Земли с соответствующей скоростью так, чтобы его положение относительно Земли не изменялось (т.е. спутник находится на геостационарной орбите). Такие спутники обычно находятся над Индийским океаном на 41-м градусе долготы.
[125] Спутник 122 способен фиксировать фотографию через каждые 15 минут. Каждая фотография содержит информацию из 12 каналов: 11 каналов в видимом и инфракрасном диапазонах с пространственным разрешением 3×3 км и 1 визуальный канал с пространственным разрешением 1×1 км. Должно быть понятно, что спутник 122 может быть способным формировать фотографии с различной частотой фиксации, а также с различным содержимым и/или с различным распределением каналов и/или различным количеством каналов. Например, каждая фотография может иметь разрешение 3712×3712 пикселов или 14 мегапикселов.
[126] В конкретном не имеющем ограничительного характера варианте осуществления настоящей технологии спутник 122 может быть реализован в виде спутника Meteosat-8. Разумеется, что в качестве источника спутниковых данных 128 могут использоваться и другие спутники.
[127] Источник 118 метеорологических данных и/или источник 120 спутниковых данных и/или сервер 114 могут принимать указание на дополнительную информацию. В частности, источник 118 метеорологических данных и/или источник 120 спутниковых данных и/или сервер 114 могут принимать указание на информацию, представляющую собой данные из системы GFS. Эти данные могут быть внедрены в качестве прогноза погоды для данного географического региона. Система GFS представляет собой глобальную систему численного прогнозирования погоды, включающую в себя глобальную компьютерную модель и выполняющую анализ изменчивости, эксплуатируемую Национальной метеорологической службой (NWS, National Weather Service) США.
[128] Кроме того, источник 118 метеорологических данных и/или источник 120 спутниковых данных и/или сервер 114 могут принимать указание на расчеты положения солнца относительно горизонта.
[129] Кроме того, источник 118 метеорологических данных и/или источник 120 спутниковых данных и/или сервер 114 могут принимать или формировать указание на информацию относительно ландшафта, связанного с данным географическим регионом.
[130] Следует отметить, что несмотря на то, что источник 118 метеорологических данных и источник 120 спутниковых данных показаны как отдельные элементы, они могут быть реализованы как единый элемент. Кроме того, источник 118 метеорологических данных и источник 120 спутниковых данных могут быть реализованы как объединенный с сервером 114 элемент.
[131] Процессор 116 сервера 114 способен выполнять первый алгоритм 140 MLA. Процессор 116 сервера 114 дополнительно способен выполнять второй алгоритм 150 MLA. Кроме того, процессор 116 сервера 114 дополнительно способен выполнять процедуру 160 обучения алгоритма MLA (процедура MLATR, Machine Learning Algorithm Training Routine).
[132] Следует отметить, что несмотря на то, что первый алгоритм 140 MLA, второй алгоритм 150 MLA и процедура 160 MLATR изображены как отдельные элементы, это не является обязательным. Например, первый алгоритм 140 MLA и второй алгоритм 150 MLA могут быть реализованы с использованием одного алгоритма MLA, при этом второй алгоритм 150 MLA может рассматриваться как дополнительно обученный (или повторно обученный) первый алгоритм 140 MLA. Кроме того, первый алгоритм 140 MLA, второй алгоритм 150 MLA и процедура 160 MLATR могут быть распределенными, т.е. они могут быть реализованы в нескольких процессах, выполняемых одним или несколькими вычислительными устройствами, включая сервер 114 и другие серверы, потенциально присутствующие в архитектуре компьютерной системы 100.
[133] Первый алгоритм 140 MLA может быть реализован в виде нейронной сети (NN, Neural Network). В общем случае сеть NN состоит из группы взаимосвязанных искусственных «нейронов», обрабатывающих информацию с использованием коннекционного подхода к вычислениям.
[134] Сети NN используются для моделирования сложных взаимосвязей между входами и выходами (без фактической информации об этих взаимосвязях) или для поиска закономерностей в данных. Сети NN сначала адаптируются на этапе обучения, когда они обеспечиваются известным набором входных данных и информацией для адаптации сети NN с целью формирования соответствующих выходных данных (для ситуации, в отношении которой выполняется попытка моделирования). На этом этапе обучения сеть NN адаптируется к изучаемой ситуации и изменяет свою структуру так, чтобы она была способна обеспечить адекватные предсказанные выходные данные для входных данных в новой ситуации (на основе обучения). Таким образом, вместо попытки определения сложных статистических распределений или математических алгоритмов для некоторой ситуации, сеть NN пытается предоставить «интуитивный» ответ на основе «восприятия» этой ситуации.
[135] Сети NN широко используются во многих ситуациях, где важно получать выходные данные на основе входных данных и менее важна или вовсе не важна информация о том, как получены эти выходные данные. Например, сети NN широко используются для оптимизации распределения веб-трафика между серверами, а также при сравнении, обработке и кластеризации данных, включая фильтрацию, векторизацию и т.п.
[136] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый алгоритм 140 MLA реализован в виде сверточной сети NN.
[137] Второй алгоритм 150 MLA также может быть реализован в виде сети NN. Для второго алгоритма 150 MLA может использоваться сеть NN с архитектурой U-net. Архитектура U-net позволяет рассчитывать вероятность осадков одновременно для всех 3D-карт. Тем не менее, следует отметить, что в альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии могут быть использованы сети NN и алгоритмы MLA других видов.
[138] На фиг. 2 представлена схема работы первого алгоритма 140 MLA. В общем случае первый алгоритм 140 MLA предназначен для формирования прогнозных выходных данных 204 на основе входных данных 202. Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии, входные данные 202 содержат последовательность 206 из шести 3D-карт осадков (в качестве примера заранее заданного количества 3D-карт осадков), а прогнозные выходные данные 204 содержат дополнительную седьмую 3D-карту 208 атмосферы.
[139] В частности, первый алгоритм 140 MLA формирует признаки входных данных 202 (представленных в виде входных 3D-карт, т.е. в виде последовательности 206 из шести 3D-карт осадков) в нескольких последовательных слоях первого алгоритма 140 MLA, реализованного в виде сети NN.
[140] Каждый сверточный слой первого алгоритма 140 MLA, реализованного в виде сети NN, содержит несколько фильтров, которые применяются к входным данным 202. Каждый фильтр извлекает признак входных данных 202. Прогнозные выходные данные 204 первого алгоритма 140 MLA, реализованного в виде сети NN, объединяют извлеченные признаки для формирования прогнозной седьмой 3D-карты.
[141] Седьмая 3D-карта в известном смысле используется для иллюстрации прогноза выпадения осадков на каждом участке седьмой 3D-карты. Более насыщенный цвет на прогнозной седьмой 3D-карте соответствует большей вероятности выпадения осадков в отмеченном месте. На прогнозной седьмой 3D-карте для каждого участка размером 2×2 км оценивается вероятность осадков, которая, например, может быть от 0 до 1.
[142] На фиг. 3 приведена схема работы второго алгоритма 150 MLA. В общем случае второй алгоритм 150 MLA предназначен для формирования на основе спутниковых данных 128 прогнозной 3D-карты для данного географического региона, связанной со спутниковыми данными 128. В частности, второй алгоритм 150 MLA способен формировать прогнозные выходные данные 304 на основе входных данных 302.
[143] Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии, входные данные 302 содержат спутниковые данные 128 в виде спутникового изображения 306. Прогнозные выходные данные 304 содержат прогнозную 3D-карту 308 осадков для соответствующего географического региона.
[144] Как известно, чтобы первый алгоритм 140 MLA и второй алгоритм 150 MLA могли реализовать свои соответствующие прогнозы на этапе использования, первый алгоритм 140 MLA и второй алгоритм 150 MLA сначала должны быть обучены. С этой целью процедура 160 MLATR способна выполнять процедуры обучения для первого алгоритма 140 MLA и второго алгоритма 150 MLA.
[145] Согласно по меньшей мере некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, процедура 160 MLATR последовательно выполняет обучение первого алгоритма 140 MLA и второго алгоритма 150 MLA. В некоторых вариантах осуществления настоящей технологии прогнозные выходные данные первого алгоритма 140 MLA используются для обучения второго алгоритма 150 MLA.
[146] Обучение первого алгоритма 140 MLA
[147] Процедура 160 MLATR принимает данные 126 метеорадиолокатора для некоторого географического региона. Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии, данные 126 метеорадиолокатора могут быть представлены в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала заданного периода времени. Заранее заданное количество последовательных 3D-карт осадков может быть равно шести.
[148] Как описано выше, анализ результатов наблюдений метеорадиолокатора (как и любого другого радиолокатора) основан на эффекте Доплера. Метеорадиолокатор через каждые 10 минут излучает радиоволны, которые отражаются окружающей средой, включая крупные капли воды. Отраженная таким образом волна в виде радиочастотного эхо-сигнала возвращается к метеорадиолокатору. Радиочастотный эхо-сигнал представляет собой отражение, а связанные с ним данные радиальной скорости содержат информацию об окружающей среде, включая местоположение капель воды и их плотность.
[149] На основе радиочастотного эхо-сигнала источник 118 метеорологических данных формирует 3D-карту осадков, которая, например, описывает атмосферу в диапазоне дальности 200-250 км по горизонтали и 10 км по вертикали.
[150] На 3D-карте осадков изображаются области с крупными каплями воды (крупнее 50 мкм). Насыщенность и цвет используются, чтобы представить плотность капель воды. Чем насыщенней цвет, тем выше вероятность осадков. На карте осадков каждый пиксел изображения соответствует участку размером 2×2 км фактического ландшафта. Иными словами, 3D-карта позволяет прогнозировать осадки с точностью до 2×2 км.
[151] Формирование обучающего набора данных для первого алгоритма 140 MLA
[152] Затем процедура 160 MLATR формирует обучающий набор данных, содержащий множество обучающих выборок для первого алгоритма 140 MLA. Каждая обучающая выборка включает в себя входные данные (т.е. обучающий объект) и метку или целевые данные.
[153] Входные данные представляют собой последовательность из шести 3D-карт осадков, формируемых через заранее заданный период времени, равный, например, 10 минутам. Целевые данные представляют собой седьмую 3D-карту, которая следует непосредственно за последовательностью из шести 3D-карт осадков. Иными словами, каждая последовательность из шести 3D-карт помечена процедурой 160 MLATR седьмой 3D-картой. Этот обучающий набор данных используется для обучения первого алгоритма 140 MLA, чтобы формировать прогнозную следующую 3D-карту на основе предыдущего заранее заданного количества 3D-карт (шести в этом примере).
[154] В общем случае можно сказать, что первый алгоритм 140 MLA обучается прогнозировать следующее состояние на основе «тенденции», выявленной для 3D-карт. Иными словами, первый алгоритм 140 MLA обучен прогнозировать будущее состояние (т.е. седьмую 3D-карту) на основе тенденций в прошлом (предыдущих шести 3D-карт).
[155] Обучение второго алгоритма 150 MLA
[156] Процедура 160 MLATR использует прогноз от первого алгоритма 140 MLA для обучения второго алгоритма 150 MLA. В частности, процедура 160 MLATR обучает второй алгоритм 150 MLA прогнозировать (т.е. формировать) 3D-карту осадков для некоторого географического региона на основе спутниковых данных 128 (т.е. спутникового изображения географической области). Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии каждое спутниковое изображение может представлять собой спутниковую фотографию с разрешением 3712×3712 пикселов (т.е. 14 мегапикселов).
[157] Следует отметить, что процедура 160 MLATR может использовать дополнительную информацию для обучения второго алгоритма 150 MLA. Эта дополнительная информация может включать в себя данные из системы GFS и/или расчеты положения солнца относительно горизонта и/или информацию о ландшафте соответствующего географического региона.
[158] Формирование обучающего набора данных на основе спутниковых фотографий
[159] Затем процедура 160 MLATR формирует обучающий набор данных для второго алгоритма 150 MLA. Обучающий набор данных содержит множество обучающих пар, каждая из которых содержит обучающий объект (т.е. входные данные) и целевые данные.
[160] Например, обучающий объект может содержать спутниковое изображение. В других вариантах осуществления изобретения обучающий объект может содержать информацию спутникового изображения и дополнительную информацию, в частности, 11 слоев фотографий, сделанных со спутника; 1 слой топографической информации о соответствующем ландшафте; 1 слой, представляющий высоту солнца над горизонтом; 7 слоев метеорологических данных, собранных системой GFS.
[161] В качестве целевых данных (т.е. метки для обучения) процедура 160 MLATR использует 3D-карты осадков, сформированные метеорадиолокаторами. Каждая 3D-карта осадков имеет сетку с ячейками размером 2×2 км. Для каждого участка размером 2×2 км на 3D-карте имеется прогноз вероятности осадков. Следует отметить, что прогноз вероятности осадков для каждого участка размером 2×2 км сформирован с использованием описанного выше наукастинга на основе информации метеорадиолокатора и может быть выражен в диапазоне от 0 до 1.
[162] Обучение второго алгоритма 150 MLA с использованием обучающего набора данных, содержащего спутниковые фотографии
[163] Описанный выше сформированный обучающий набор данных подается в качестве входных данных во второй алгоритм 150 MLA. Процедура 160 MLATR может использовать для обучения второго алгоритма 150 MLA алгоритм обратного распространения так, чтобы отклонение (невязка) прогноза, сформированного вторым алгоритмом 150 MLA, от целевых данных (т.е. от 3D-карты осадков, сформированной первым алгоритмом 140 MLA) использовалось в качестве ошибки. Ошибка возвращается к весовым коэффициентам второго алгоритма 150 MLA, и эти весовые коэффициенты корректируются на основе ошибки. Обратное распространение итеративно повторяется, пока ошибка не будет сведена к минимуму.
[164] Формирование прогноза с помощью второго алгоритма 150 MLA, обученного с использованием обучающего набора данных, содержащего спутниковые фотографии
[165] Затем обученный таким образом второй алгоритм 150 MLA формирует прогноз.
[166] В частности, обученный таким образом второй алгоритм 150 MLA на этапе использования принимает входные данные 302 (в виде спутникового изображения 306 для географического региона, где требуется прогноз погоды) и формирует прогнозные выходные данные 304 в виде прогнозной 3D-карты 308 осадков, указывающей вероятность выпадения осадков на каждом участке размером 2×2 км прогнозной 3D-карты 308 осадков (т.е. в соответствующем географическом регионе).
[167] Таким образом, можно сказать, что второй алгоритм 150 MLA формирует прогноз для некоторой территории, включая вероятность осадков, основываясь на данных метеорадиолокатора (т.е. на данных прогнозной 3D-карты 308 осадков), прогнозируемых на основе данных спутниковых фотографий.
[168] Сформированный таким образом прогноз (т.е. прогнозная 3D-карта 308 осадков) может быть использован для формирования прогноза погоды. Следует отметить, что прогнозная 3D-карта 308 осадков может быть использована совместно с фактическими данными 126 метеорадиолокатора (т.е. для дополнения данных 126 метеорадиолокатора) или вместо них (т.е. в тех областях, где фактические данные 126 метеорадиолокатора недоступны).
[169] Также следует отметить, что прогнозная 3D-карта 308 осадков может быть использована (совместно с фактическими данными 126 метеорадиолокатора или без них) для формирования прогноза погода с использованием множества способов, включая модели NWP.
[170] Формирование прогноза на основе спутниковых данных для будущего периода времени
[171] Описанный выше прогноз формируется вторым алгоритмом 150 MLA для текущего времени, т.е. второй алгоритм 150 MLA обучен формировать прогнозную 3D-карту 308 осадков на основе текущих и прошлых спутниковых фотографий.
[172] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии также может быть сформирован прогноз для будущего периода времени (например, на следующие два часа). Для формирования прогноза будущих осадков второй алгоритм 150 MLA (и/или первый алгоритм 140 MLA) дополнительно способен формировать синтезированные 3D-карты осадков для будущего периода времени или синтезированные спутниковые фотографии для будущего периода времени.
[173] Эта синтезированная информация используется в качестве входных данных для первого алгоритма 140 MLA и/или для второго алгоритма 150 MLA. Для формирования синтезированных 3D-карт осадков или синтезированных спутниковых фотографий может использоваться технология оптического потока.
[174] Концепция оптического потока используется в компьютерном зрении для обнаружения сдвигов между изображениями. Алгоритм оптического потока включает в себя анализ последовательности изображений и обнаружение поля векторов сдвига в каждой точке изображения.
[175] На основе предыдущего изображения и обнаруженного поля векторов сдвига алгоритм оптического потока формирует следующее изображение для синтезированных 3D-карт осадков. Сформированное следующее изображение представляет собой следующую 3D-карту осадков для следующих 15 минут.
[176] Аналогичный по сути подход может использоваться и для формирования синтезированных спутниковых фотографий.
[177] С учетом описанной выше архитектуры возможна реализация способа формирования прогноза погоды. На фиг. 4 представлена блок-схема способа 400, который реализован согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии. Способ 400 можно разделить на два основных этапа: этап 402 обучения и этап 404 использования. Способ 400 может выполняться процессором 116 сервера 114. В частности, этап 402 обучения может быть реализован процедурой 160 MLATR, а этап 404 использования может быть реализован вторым алгоритмом 150 MLA.
[178] Шаг 406: прием алгоритмом MLA в течение периода времени обучения указания на данные 126 метеорадиолокатора для обучающего географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени.
[179] На шаге 406 процедура 160 MLATR принимает указание на данные 126 метеорадиолокатора для обучающего географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени.
[180] Как описано выше, шаг 406 выполняется в течение периода времени обучения. Дополнительно следует отметить, что обучающий географический регион представляет собой регион, для которого данные 126 метеорадиолокатора доступны из источника 118 метеорологических данных. Также следует отметить, что обучающий географический регион может отличаться от региона, для которого будет формироваться прогноз погоды.
[181] Шаг 408: формирование алгоритмом MLA прогнозной дополнительной 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за периодом времени обучения.
[182] На шаге 408 процедура 160 MLATR инициирует формирование первым алгоритмом140 MLA прогнозной дополнительной следующей 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за периодом времени обучения.
[183] Следует еще раз отметить, что первый алгоритм 140 MLA обучен формировать такой прогноз на основе заранее заданного количества последовательных 3D-карт. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии это заранее заданное количество может быть равно шести.
[184] Шаг 410: прием алгоритмом MLA в течение данного периода времени спутниковых данных для данного географического региона.
[185] На шаге 410 процедура 160 MLATR принимает спутниковые данные 128 для данного географического региона. Как описано выше, спутниковые данные 128 принимаются от источника 120 спутниковых данных. Выше также указано, что спутниковые данные 128 могут быть представлены в виде спутникового изображения 306.
[186] Шаг 412: обучение алгоритма MLA на основе спутниковых данных для формирования прогнозной 3D-карты осадков путем предоставления алгоритму MLA обучающего набора, содержащего спутниковые данные в качестве обучающего объекта и сформированной вторым алгоритмом MLA прогнозной дополнительной следующей 3D-карты осадков в качестве целевых данных.
[187] На шаге 412 процедура 160 MLATR обучает второй алгоритм 150 MLA на основе спутниковых данных для формирования прогнозной 3D-карты осадков путем предоставления второму алгоритму 150 MLA множества обучающих наборов, каждый из которых содержит спутниковые данные 128 в качестве обучающего объекта и сформированную вторым алгоритмом MLA на шаге 408 прогнозную дополнительную следующую 3D-карту осадков в качестве целевых данных.
[188] После обучения второго алгоритма 150 MLA в достаточном объеме (определяется с использованием любой подходящей метрики, известной в области алгоритмов MLA и обучения алгоритмов MLA) способ 400 может использоваться на этапе 404 использования.
[189] Шаг 414: прием вторым алгоритмом 150 MLA в течение данного периода времени спутниковых данных для некоторого географического региона.
[190] На этапе 414 второй алгоритм 150 MLA принимает в течение периода использования спутниковые данные 128 для географического региона, для которого требуется прогноз погоды.
[191] Шаг 416: формирование алгоритмом MLA на основе спутниковых данных 3D-карты осадков для данного географического региона.
[192] На шаге 416 второй алгоритм 150 MLA формирует на основе спутниковых данных прогнозную 3D-карту 308 осадков для данного географического региона.
[193] Шаг 418: формирование алгоритмом MLA на основе 3D-карты осадков прогноза погоды для данного периода времени и данного географического региона.
[194] На шаге 418 второй алгоритм 150 MLA на основе по меньшей мере 3D-карты осадков формирует прогноз погоды для данного периода времени и данного географического региона.
[195] Как описано выше, второй алгоритм 150 MLA может формировать прогноз погоды на основе прогнозной 3D-карты 308 осадков или на основе сочетания 3D-карты 308 осадков и фактических данных 126 метеорадиолокатора для данного географического региона.
[196] На шаге 418 может использоваться любая подходящая модель NWP.
[197] Другие конкретные варианты осуществления способа формирования прогноза погоды
[198] На фиг. 5 представлена блок-схема способа 500, который выполняется согласно альтернативным вариантам осуществления настоящей технологии, не имеющим ограничительного характера.
[199] Способ 500 предназначен для формирования прогноза погоды и выполняется процессором 116 сервера 114, при этом процессор 116 способен выполнять алгоритм MLA, такой как описанные выше первый алгоритм 140 MLA и второй алгоритм 150 MLA, и процедуру 160 MLATR.
[200] Шаг 502: прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени.
[201] На шаге 502 первый алгоритм 140 MLA принимает в течение некоторого периода времени указание на данные 126 метеорадиолокатора для некоторого географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени.
[202] Шаг 504: прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени.
[203] На шаге 504 второй алгоритм 150 MLA принимает спутниковые данные 128 для данного географического региона и данного периода времени.
[204] Шаг 506: формирование алгоритмом MLA на основе спутниковых данных дополнительной 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за данным периодом времени.
[205] На шаге 506 второй алгоритм 150 MLA формирует на основе спутниковых данных дополнительную следующую 3D-карту осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за данным периодом времени.
[206] Шаг 508: формирование алгоритмом MLA прогноза погоды для данного периода времени на основе заранее заданного количества последовательных 3D-карт осадков и дополнительной следующей 3D-карты осадков.
[207] На шаге 508 второй алгоритм 150 MLA формирует прогноз погоды для данного периода времени на основе заранее заданного количества последовательных 3D-карт осадков и дополнительной следующей 3D-карты осадков.
[208] В некоторых вариантах осуществления способа 400 и/или способа 500 прогноз погоды представляет собой прогноз наукастинга.
[209] В некоторых вариантах осуществления способа 400 и/или способа 500 прогноз наукастинга имеет очень короткий срок прогноза.
[210] В некоторых вариантах осуществления способа 400 и/или способа 500 очень короткий срок прогноза не превышает двух часов в пределах данного периода времени.
[211] В некоторых вариантах осуществления способа 400 и/или способа 500 формирование прогноза погоды дополнительно включает в себя формирование прогноза погоды для будущего периода времени, следующим за данным периодом времени.
[212] В некоторых вариантах осуществления способа 400 и/или способа 500 формирование дополнительной следующей 3D-карты включает в себя применение технологии оптического потока.
[213] В некоторых вариантах осуществления способа 400 и/или способа 500 применение технологии оптического потока обеспечивает формирование будущих 3D-карт осадков на основе заранее заданного количества последовательных 3D-карт осадков и/или формирование будущих спутниковых данных на основе спутниковых данных.
[214] В некоторых вариантах осуществления способа 400 и/или способа 500 формирование алгоритмом MLA прогноза погоды для данного периода времени осуществляется для географического региона прогноза, который шире данного географического региона.
[215] В некоторых вариантах осуществления способ 400 и/или способ 500 дополнительно включает в себя обучение второго алгоритма MLA на основе обучающего набора, содержащего обучающий объект и обучающую метку, при этом обучающий объект содержит спутниковые данные, а обучающая метка содержит результат прогноза первой обученной сетью NN, представляющий собой дополнительную следующую 3D-карту.
[216] В некоторых вариантах осуществления способа 400 и/или способа 500 спутниковые данные содержат: множество слоев фотографий, сделанных со спутника; слой топографической информации; слой, представляющий высоту солнца над горизонтом; множество слоев метеорологических данных, собранных системой GFS.
[217] На фиг. 6 представлена блок-схема способа 600, который выполняется согласно альтернативным вариантам осуществления настоящей технологии, не имеющим ограничительного характера.
[218] Способ 600 предназначен для формирования прогноза погоды и выполняется процессором 116 сервера 114, при этом процессор 116 способен выполнять алгоритм MLA, такой как описанные выше первый алгоритм 140 MLA и второй алгоритм 150 MLA, и процедуру 160 MLATR.
[219] Шаг 602: прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, зафиксированные до начала данного периода времени.
[220] На шаге 602 второй алгоритм 150 MLA принимает в течение некоторого периода времени указание на данные 126 метеорадиолокатора для некоторого географического региона, зафиксированные до начала данного периода времени.
[221] Шаг 604: прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени.
[222] На шаге 604 второй алгоритм 150 MLA принимает спутниковые данные 128 для данного географического региона и данного периода времени.
[223] Шаг 606: формирование алгоритмом MLA на основе данных метеорадиолокатора и спутниковых данных дополнительных данных, представляющих собой прогнозные метеорологические данные для другого географического региона, который по меньшей мере частично отличается от данного географического региона, и/или для периода времени, следующего за данным периодом времени.
[224] На шаге 606 второй алгоритм 150 MLA на основе спутниковых данных формирует дополнительные данные, представляющие собой прогнозные метеорологические данные для другого географического региона, который по меньшей мере частично отличается от данного географического региона, и/или для периода времени, следующего за данным периодом времени.
[225] Шаг 608: формирование алгоритмом MLA прогноза погоды на основе данных метеорадиолокатора и дополнительных данных.
[226] На шаге 608 второй алгоритм 150 MLA формирует прогноз погоды на основе данных метеорадиолокатора и дополнительных данных.
[227] Следует отметить, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии прогноз погоды может быть предназначен для некоторого конкретного периода времени, для периода времени, следующего за этим периодом времени, для некоторого географического региона, для другого географического региона.
[228] Для специалиста в данной области могут быть очевидными изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено исключительно в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И СЕРВЕРЫ ДЛЯ ГЕНЕРИРОВАНИЯ ПРОГНОЗНОЙ ОЦЕНКИ АЛГОРИТМОМ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2831623C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО ПРОГНОЗИРОВАНИЯ ВЕРОЯТНОСТИ ВОЗНИКНОВЕНИЯ ПРИРОДНЫХ ПОЖАРОВ | 2023 |
|
RU2832688C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2767955C1 |
| Способ корректировки цифровой модели высот (варианты) | 2021 |
|
RU2818049C2 |
| Способ и система для хранения множества документов | 2018 |
|
RU2744028C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБУЧЕНИЯ АЛГОРИТМА МАШИННОГО ОБУЧЕНИЯ ПРОГНОЗИРОВАНАНИЮ ОЦЕНКИ ВИДИМОСТИ | 2022 |
|
RU2814079C1 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ОБУЧАЮЩЕГО НАБОРА ДЛЯ АЛГОРИТМА МАШИННОГО ОБУЧЕНИЯ | 2017 |
|
RU2711125C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБУЧЕНИЯ НЕЙРОННОЙ СЕТИ ФОРМИРОВАНИЮ ТЕКСТОВОЙ ВЫХОДНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2020 |
|
RU2798362C2 |
| СИСТЕМА И СПОСОБ ОБУЧЕНИЯ МОДЕЛЕЙ МАШИННОГО ОБУЧЕНИЯ ДЛЯ РАНЖИРОВАНИЯ РЕЗУЛЬТАТОВ ПОИСКА | 2023 |
|
RU2832419C2 |
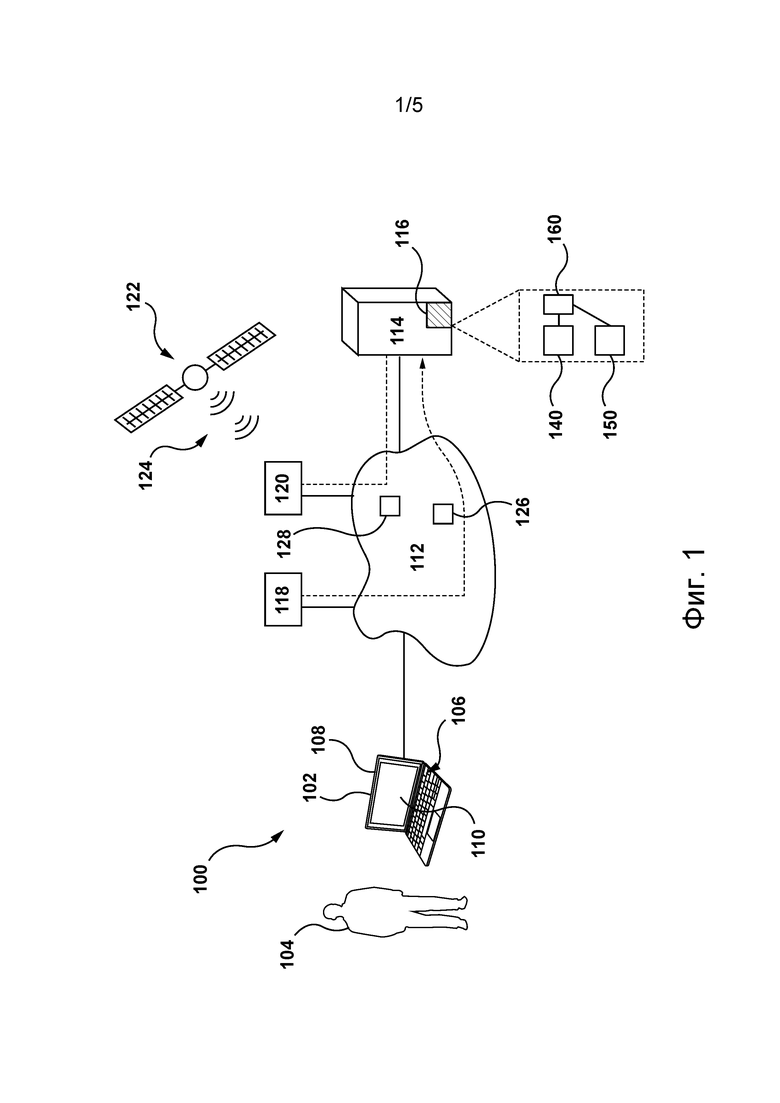
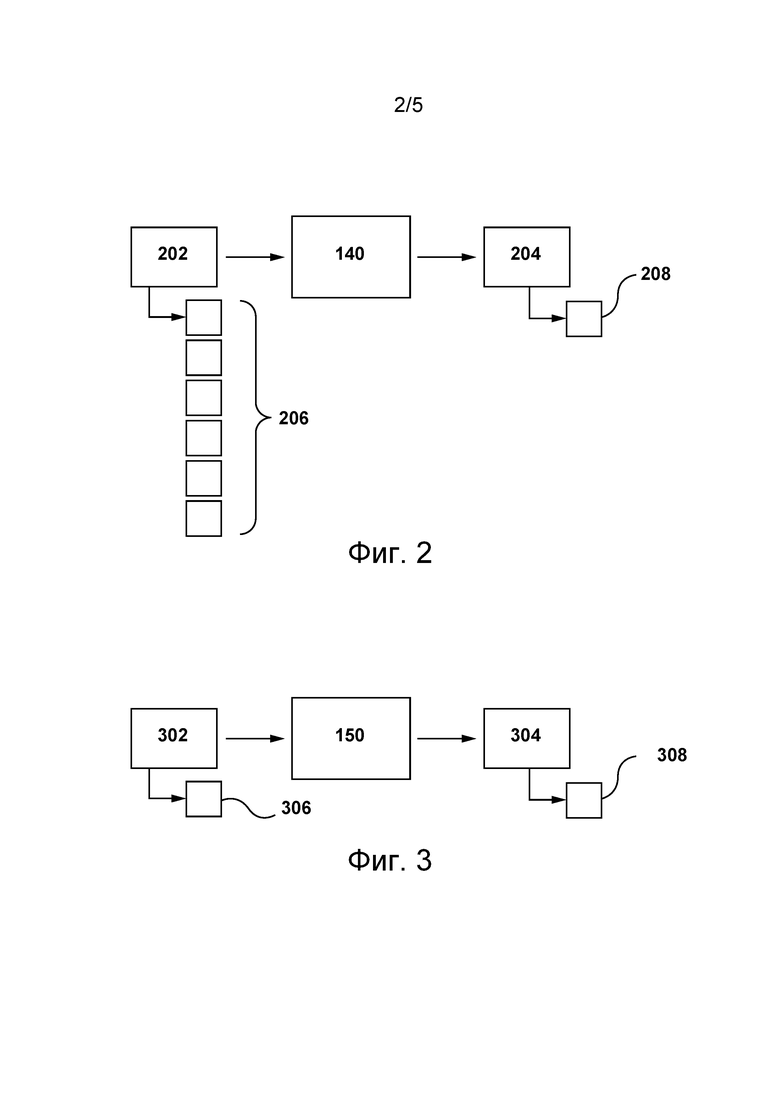
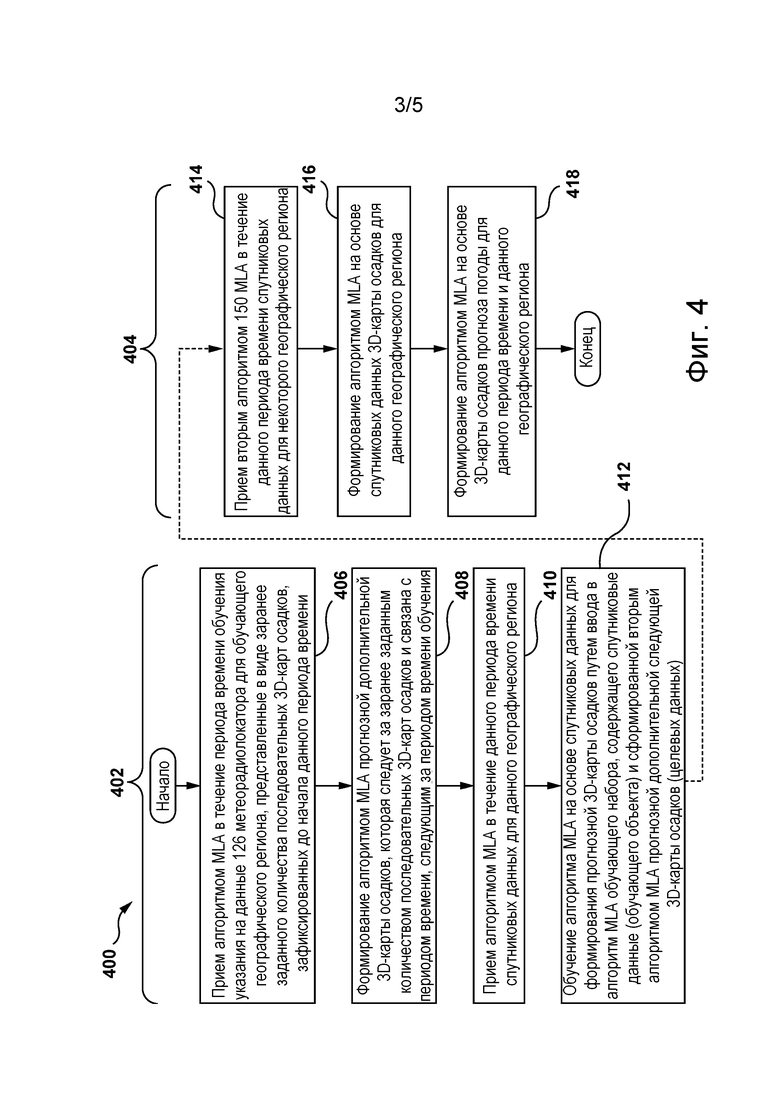
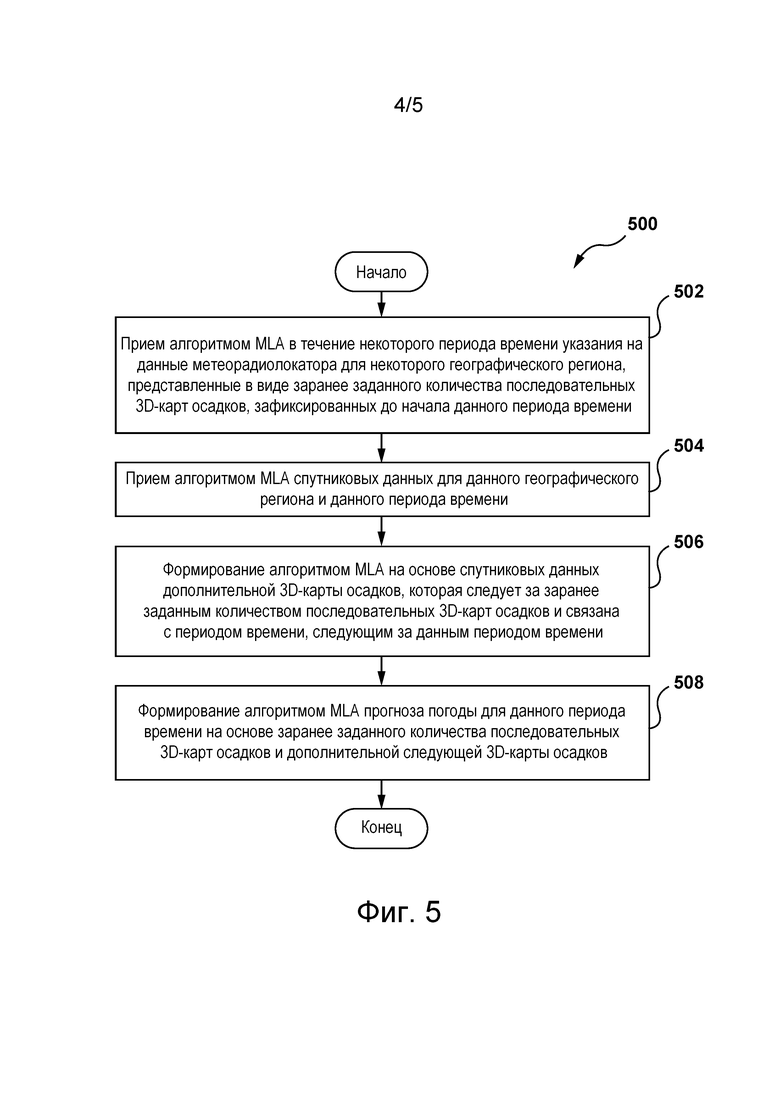
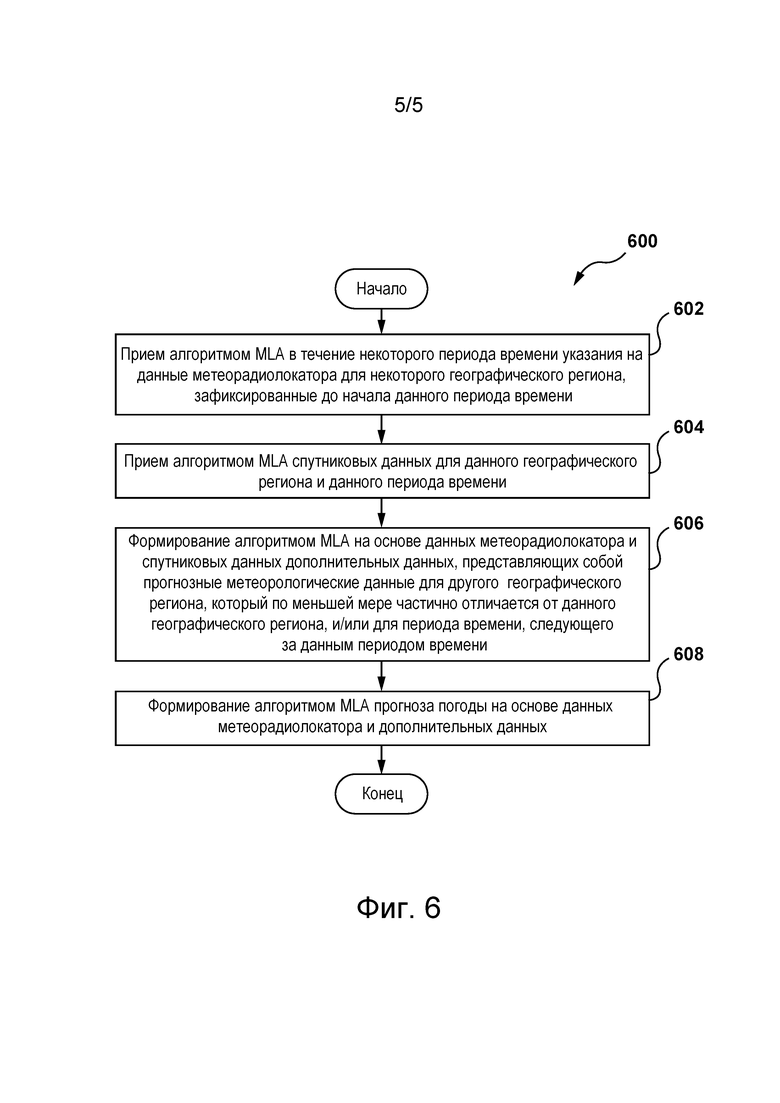
Изобретение относится к области прогнозирования погодных условий. Заявлен способ формирования прогноза погоды, который выполняется сервером, содержащим процессор, способный выполнять алгоритм машинного бучения (MLA). Способ включает в себя: прием алгоритмом MLA в течение некоторого периода времени спутниковых данных для некоторого географического региона; формирование алгоритмом MLA на основе спутниковых данных 3D-карты осадков для данного географического региона; формирование алгоритмом MLA на основе 3D-карты осадков прогноза погоды для данного периода времени и данного географического региона. Алгоритм MLA обучен на основе прогноза от другого алгоритма MLA (на основе данных метеорадиолокатора) и спутниковых данных. Технический результат – повышение точности прогноза погоды. 3 н. и 18 з.п. ф-лы, 6 ил.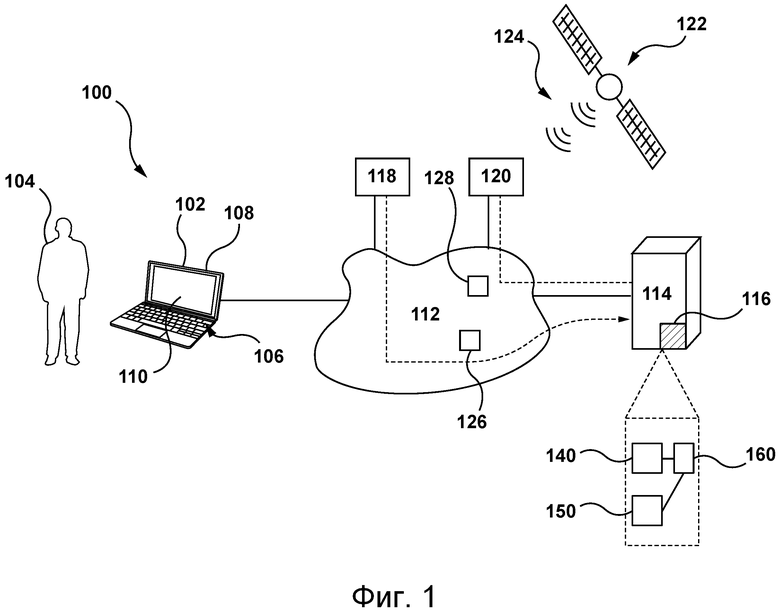
1. Способ формирования прогноза погоды, выполняемый сервером, содержащим процессор, способный выполнять алгоритм машинного бучения (MLA), и включающий в себя:
- прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени;
- прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени;
- формирование алгоритмом MLA на основе спутниковых данных дополнительной 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за данным периодом времени;
- формирование алгоритмом MLA прогноза погоды для данного периода времени на основе заранее заданного количества последовательных 3D-карт осадков и дополнительной следующей 3D-карты осадков.
2. Способ по п.1, отличающийся тем, что прогноз погоды представляет собой прогноз наукастинга.
3. Способ по п.2, отличающийся тем, что прогноз наукастинга имеет очень короткий срок прогноза.
4. Способ по п.3, отличающийся тем, что очень короткий срок прогноза не превышает двух часов в пределах данного периода времени.
5. Способ по п.1, отличающийся тем, что формирование прогноза погоды дополнительно включает в себя формирование прогноза погоды для будущего периода времени, следующего за данным периодом времени.
6. Способ по п.3, отличающийся тем, что формирование дополнительной следующей 3D-карты включает в себя применение технологии оптического потока.
7. Способ по п.6, отличающийся тем, что применение технологии оптического потока обеспечивает формирование будущих 3D-карт осадков на основе заранее заданного количества последовательных 3D-карт осадков и/или формирование будущих спутниковых данных на основе спутниковых данных.
8. Способ по п.1, отличающийся тем, что формирование алгоритмом MLA прогноза погоды для данного периода времени осуществляется для географического региона прогноза, который шире данного географического региона.
9. Способ по п.1, отличающийся тем, что алгоритм MLA включает в себя первый алгоритм MLA и второй алгоритм MLA.
10. Способ по п.8, отличающийся тем, что первый алгоритм MLA способен формировать прогнозную дополнительную следующую 3D-карту на основе заранее заданного количества последовательных 3D-карт осадков.
11. Способ по п.10, отличающийся тем, что заранее заданное количество последовательных 3D-карт осадков равно шести.
12. Способ по п.10, отличающийся тем, что первый алгоритм MLA представляет собой нейронную сеть (NN).
13. Способ по п.10, отличающийся тем, что второй алгоритм MLA способен формировать прогнозную дополнительную следующую 3D-карту осадков на основе спутниковых данных.
14. Способ по п.13, отличающийся тем, что второй алгоритм MLA представляет собой сеть NN.
15. Способ по п.14, отличающийся тем, что сеть NN содержит сеть NN с архитектурой U-net.
16. Способ по п.13, отличающийся тем, что дополнительно включает в себя обучение второго алгоритма MLA на основе обучающего набора, содержащего обучающий объект и обучающую метку, при этом обучающий объект содержит спутниковые данные, а обучающая метка содержит результат прогноза первым алгоритмом MLA, представляющий собой дополнительную следующую 3D-карту.
17. Способ по п.16, отличающийся тем, что спутниковые данные содержат множество слоев фотографий, сделанных со спутника, слой топографической информации, слой, представляющий высоту солнца над горизонтом, и множество слоев метеорологических данных, собранных глобальной системой прогноза (GFS).
18. Способ формирования прогноза погоды, выполняемый сервером, содержащим процессор, способный выполнять алгоритм машинного бучения (MLA), и включающий в себя:
- прием алгоритмом MLA в течение некоторого периода времени указания на данные метеорадиолокатора для некоторого географического региона, зафиксированные до начала данного периода времени;
- прием алгоритмом MLA спутниковых данных для данного географического региона и данного периода времени;
- формирование алгоритмом MLA на основе спутниковых данных дополнительных данных, представляющих собой прогнозные метеорологические данные для другого географического региона, который по меньшей мере частично отличается от данного географического региона, и/или для периода времени, следующего за данным периодом времени;
- формирование алгоритмом MLA прогноза погоды на основе данных метеорадиолокатора и дополнительных данных.
19. Способ по п. 18, отличающийся тем, что прогноз погоды предназначен для данного периода времени, для периода времени, следующего за данным периодом времени, для данного географического региона или для другого географического региона.
20. Способ формирования прогноза погоды, выполняемый сервером, содержащим процессор, способный выполнять алгоритм машинного бучения (MLA), и включающий в себя:
- прием алгоритмом MLA в течение некоторого периода времени спутниковых данных для некоторого географического региона;
- формирование алгоритмом MLA на основе спутниковых данных 3D-карты осадков для данного географического региона;
- формирование алгоритмом MLA на основе 3D-карты осадков прогноза погоды для данного периода времени и данного географического региона.
21. Способ по п. 20, отличающийся тем, что алгоритм MLA представляет собой первый алгоритм MLA, а способ дополнительно включает в себя обучение первого алгоритма MLA путем выполнения следующих действий:
- прием вторым алгоритмом MLA в течение периода времени обучения указания на данные метеорадиолокатора для обучающего географического региона, представленные в виде заранее заданного количества последовательных 3D-карт осадков, зафиксированных до начала данного периода времени;
- формирование вторым алгоритмом MLA прогнозной дополнительной следующей 3D-карты осадков, которая следует за заранее заданным количеством последовательных 3D-карт осадков и связана с периодом времени, следующим за периодом времени обучения;
- прием первым алгоритмом MLA в течение данного периода времени спутниковых данных для обучающего географического региона;
- обучение первого алгоритма MLA на основе спутниковых данных для формирования прогнозной 3D-карты осадков путем предоставления первому алгоритму MLA обучающего набора, содержащего спутниковые данные в качестве обучающего объекта и сформированную вторым алгоритмом MLA прогнозную дополнительную следующую 3D-карту осадков в качестве целевых данных.
| CN 103235890 A, 07.08.2013 | |||
| CN 108508505 A, 09.07.2018 | |||
| CN 108734357 A, 02.11.2018 | |||
| CN 107703564 A, 16.02.2018 | |||
| US 20170357029 A1, 14.12.2017 | |||
| CN 107341449 A, 10.11.2017 | |||
| CN 107632295 A, 26.01.2018 | |||
| CN 108154273 A, 12.06.2018 | |||
| СПОСОБ ОЦЕНКИ ИНТЕНСИВНОСТИ ДОЖДЯ ПО ДАННЫМ ИЗМЕРЕНИЙ СПУТНИКОВОГО МИКРОВОЛНОВОГО РАДИОМЕТРА AMSR2 | 2015 |
|
RU2627568C2 |

