Изобретение относится к космической технике, а именно к устройству космического аппарата, целью которого является доставка полезного груза на космическое тело естественного происхождения, обладающее малым гравитационным полем и неспособное к активным манёврам уклонения, таким как астероиды, кометы, малые спутники планет.
Известен космический аппарат (далее КА) из патента РФ № 2247683, МПК B64G1/00, B64G1/50, опубл. 10.03.2005. Конструкция предполагает модульное исполнение. В одном модуле размещена служебная аппаратура, в других – целевая аппаратура и командно-измерительные приборы системы управления космическим аппаратом. На модуле служебной аппаратуры установлены солнечные батареи, также установлены плазменные двигатели с рабочим телом.
Однако КА может быть использован только в качестве искусственного спутника космических тел. Конструкция не предполагает посадку на космические тела.
Известен КА из патента РФ № 2144889, МПК B64G1/00, B64G1/42, B64G1/50, опубл. 27.01.2000. Конструкция КА содержит отсеки с целевой и служебной аппаратурой, систему электропитания и систему терморегулирования.
Недостатком аналога является то, что корпус КА предполагает моноблочное исполнение с герметичными отсеками. Это решение существенно увеличивает массу КА.
Наиболее близким аналогом заявленного решения КА является аппарат, известный из патента РФ на изобретение № 2617162, МПК B64G1/10, B64G1/22, B64G1/50, опубл. 21.04.2017. КА содержит модуль служебных систем и модуль полезной нагрузки, соединённые фермой. В корпусе модуля служебных систем размещены блоки служебной аппаратуры, а снаружи – аккумуляторная батарея, поворотная солнечная батарея, четыре блока двигателей ориентации и стабилизации, три сферических топливных бака и шар-баллон со сжатым газом. Модуль полезной нагрузки содержит платформу и блок прецизионных приборов: оптико-электронных и астродатчиков – с разных сторон собственной платформы, удалённой от платформы. Платформы выполнены в виде сотопанелей с тепловыми трубами. На приборной платформе могут быть установлены радиаторы-охладители. Модуль полезной нагрузки снабжен антеннами радиосвязи разной степени направленности, а также радиаторами-охладителями, закрепленными на стержнях фермы. КА предназначен для работы на геостанционарной и высокоэллиптических орбитах искусственных спутников Земли.
Недостатком прототипа является отсутствие посадочного устройства, малый запас топлива в условиях космического полета КА.
Технической задачей предлагаемого космического аппарата является расширение функциональных возможностей КА за счет обеспечения доставки полезного груза на космическое тело с малым гравитационным полем.
Технический результат достигается тем, что космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем, содержит, в соответствии с изобретением, соединенные друг с другом модуль служебных систем и модуль полезной нагрузки, причем модуль служебных систем, выполнен как сварная металлическая конструкция в виде прямой восьмигранной призмы из жестко соединенных продольных стоек и поперечных силовых элементов, на одной из граней призмы установлен на сварной раме в форме прямой треугольной призмы дальномер, на двух других гранях закреплены на кронштейнах два астродатчика, продольные оси последних расположены под углом 90º относительно друг друга, на четырёх продольных стойках модуля служебных систем установлены на кронштейнах две узкоугольные и две широкоугольные камеры, с внутренней стороны четырех боковых граней модуля служебных систем установлены элементы энергообеспечения, параллельно продольной оси указанного модуля жестко закреплены на четырех противоположных силовых перегородках продольных стоек с заглублением внутрь при помощи шпангоутов и болтовых соединений четыре сферических топливных бака, на топливных баках в кронштейнах закреплены четыре блока двигателей точной коррекции, на верхней части модуля служебных систем закреплен с помощью штырей, выполненный в форме тора, бак со сжатым газом; модуль полезной нагрузки в форме усеченной восьмигранной пирамиды установлен продольно на модуль служебных систем, указанный модуль состоит из шестнадцати стержней, образующих треугольную решетку, и шестнадцати поперечных силовых элементов с опорными узлами нижнего и верхнего пояса, причем опорный узел верхнего пояса соединяет модуль служебных систем с модулем полезной нагрузки; на закрепленные с внешней стороны указанного модуля опорные узлы нижнего пояса установлены на кронштейнах четыре тормозных двигателя, а на закрепленные с внутренней стороны опорные узлы, чередующиеся с внешними, установлены кронштейны для закрепления полезного груза внутри модуля полезной нагрузки; в верхней части модуля служебных систем на раме установлен двигатель орбитального маневрирования, рама двигателя состоит из установленного на продольных стойках модуля служебных систем каркаса закрепления, узла тарировки вектора тяги относительно центра масс и рамы карданного подвеса, каркас закрепления включает восемь продольных балок прямоугольного сечения, жестко закрепленных одним концом с продольными стойками рамы модуля служебных систем, а вторым – с вектором тяги, который состоит из рамы в форме кольца с приваренными к нему стыковочными элементами в виде уголков, крепящихся болтовым соединением с шаровыми опорами, установленными с двух сторон стержней векторов тяги и закрепленными с одной стороны – на верхней поверхности рамы в форме кольца, а с другой стороны – на нижней поверхности рамы карданного подвеса, в нижней части модуля служебных систем установлено посадочное устройство, включающее четыре посадочные опоры, состоящие из телескопически соединенных подвижного штока и цилиндра с амортизирующим сотовым наполнителем, соединенных с подкосами которые, в свою очередь, и соединены с помощью болтового соединения с расположенными внизу штока опорными тарелями.
В состав конструкции КА входят: модуль служебных систем, модуль полезной нагрузки, посадочное устройство, рама двигателя орбитального маневрирования, двигательная установка и бортовой комплекс управления.
Модуль служебных систем и модуль полезной нагрузки образуют каркас КА, в котором размешается часть бортового комплекса управления, элементы энергообеспечения, полезный груз и элементы двигательной установки. Расположение двигателя орбитального маневрирования обеспечивает рама двигателя орбитального маневрирования и осуществляет регулирование и управление вектором тяги. Двигательная установка обеспечивает маневрирование и управление в условиях космического полета, а также снижение скорости при посадке на космическое тело. Посадочное устройство обеспечивает гашение кинетической энергии КА и посадку на космическое тело.
Двигательная установка состоит из блоков двигателей точной коррекции, тормозных двигателей, двигателя орбитального маневрирования, четырех сферических топливных баков и торового бака со сжатым газом. Бортовой комплекс управления включает в себя два астродатчика, трехкомпонентный измеритель угловой скорости, инерционный измерительный блок, дальномер, систему управления бортовую, блок силовой автоматики, две камеры широкоугольных, две камеры узкоугольных.
Конструкция КА поясняется фигурами (фиг.1-15), где изображены узлы и детали устройства:
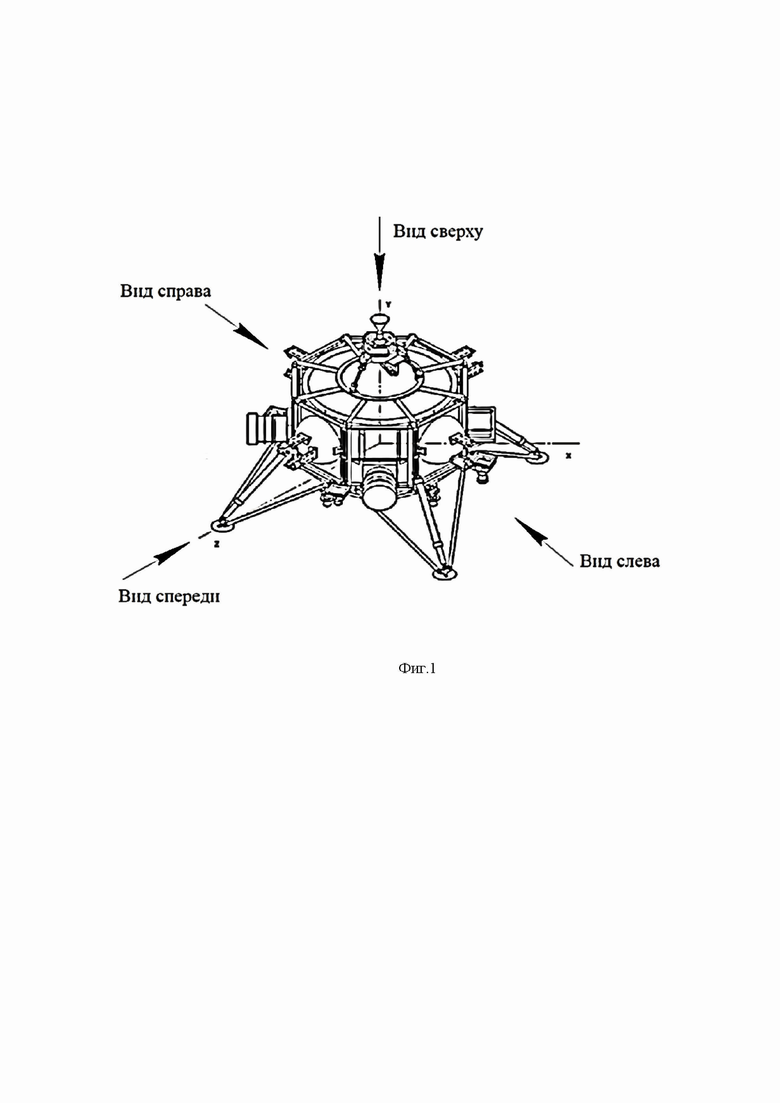
фиг.1 представлен общий вид КА в изометрии;
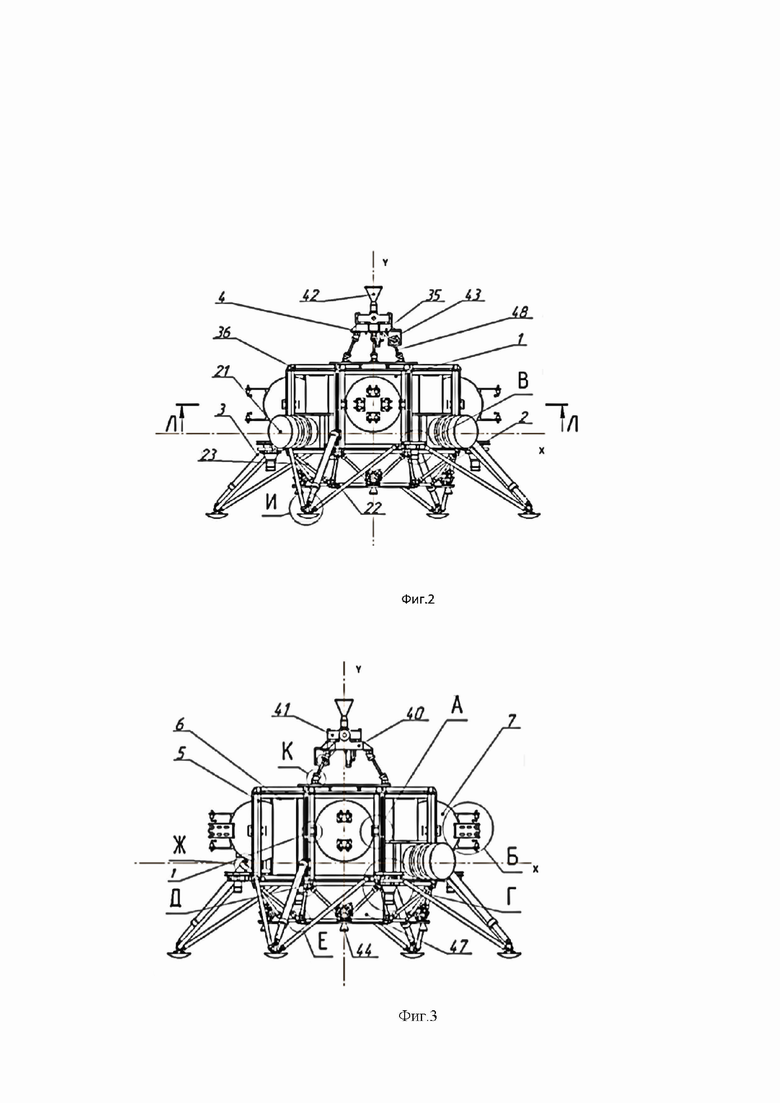
фиг.2 представлен вид спереди КА;
фиг.3 – вид слева КА;
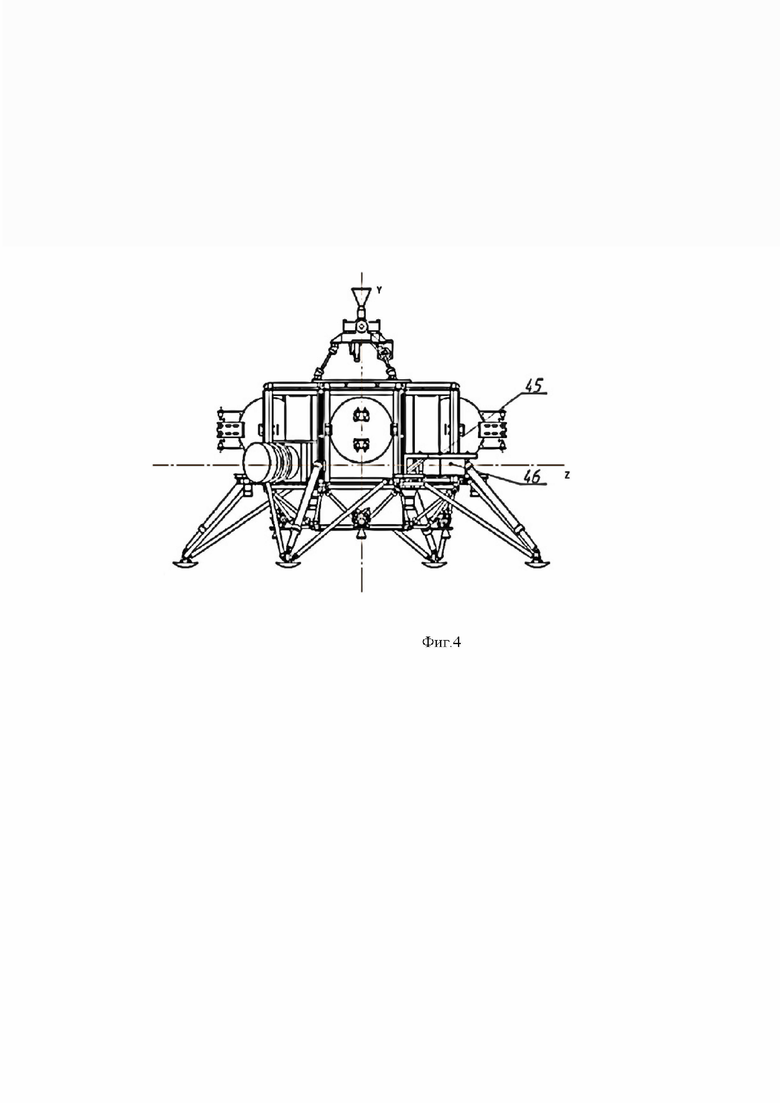
фиг. 4 – вид справа КА;
фиг. 5 – вид сверху КА;
фиг. 6 – вид А с фиг.3 – крепление топливного бака;
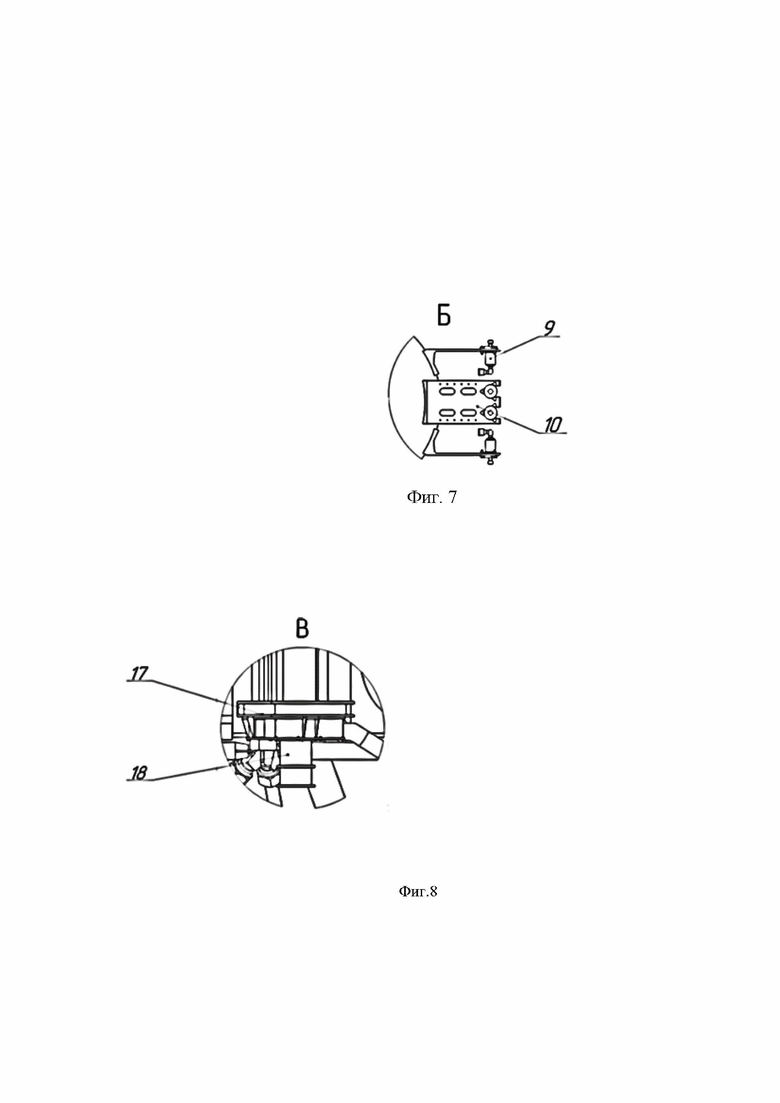
фиг. 7 – вид Б с фиг.3 – блок двигателей точной коррекции;
фиг. 8 – вид В с фиг.2 – камера широкоугольная;
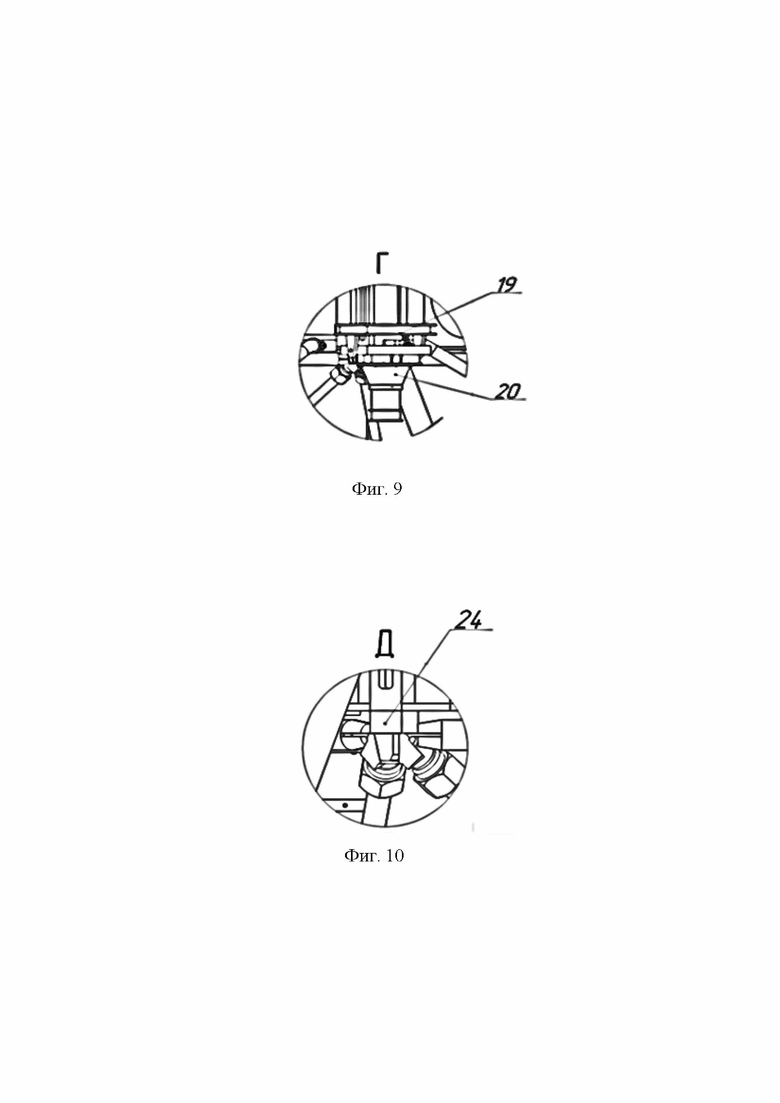
фиг. 9 – вид Г с фиг.3 – камера узкоугольная;
фиг. 10 – вид Д с фиг.3 – узел верхнего пояса модуля полезной нагрузки;
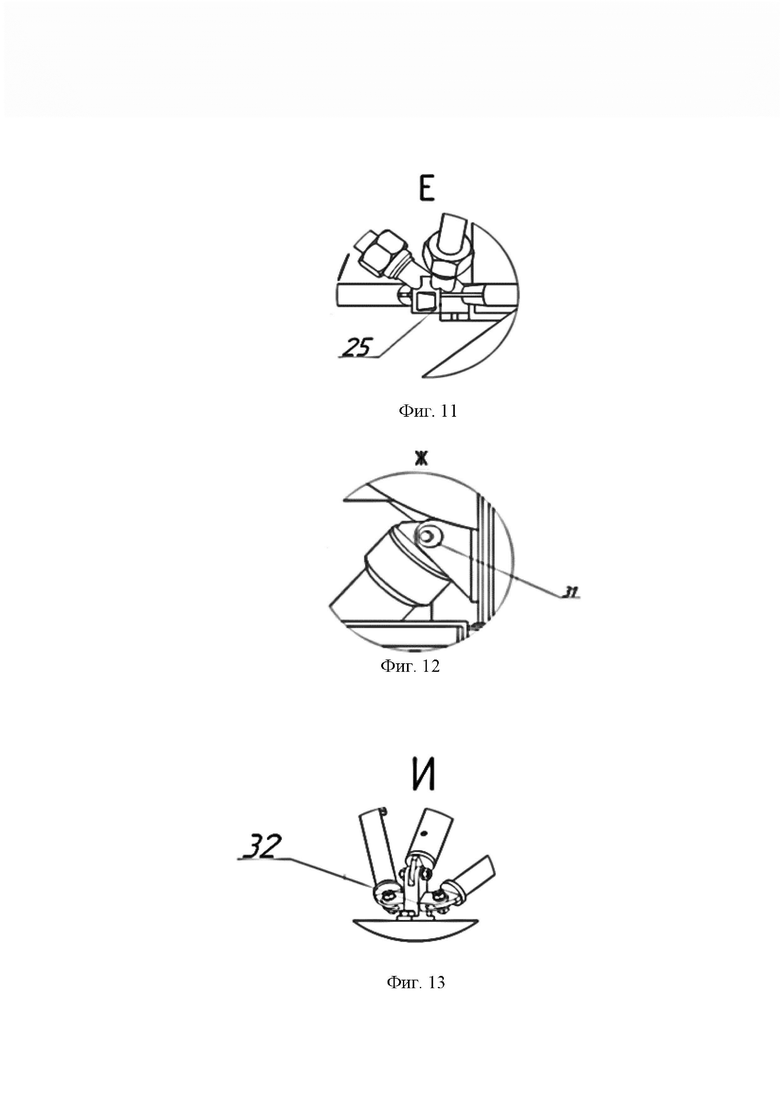
фиг. 11 – вид Е с фиг.3 – узел нижнего пояса модуля полезной нагрузки;
фиг. 12 – вид Ж с фиг.3 – узел крепления посадочного устройства к корпусу;
фиг. 13 – вид И с фиг.2 – узел крепления с опорной тарелью;
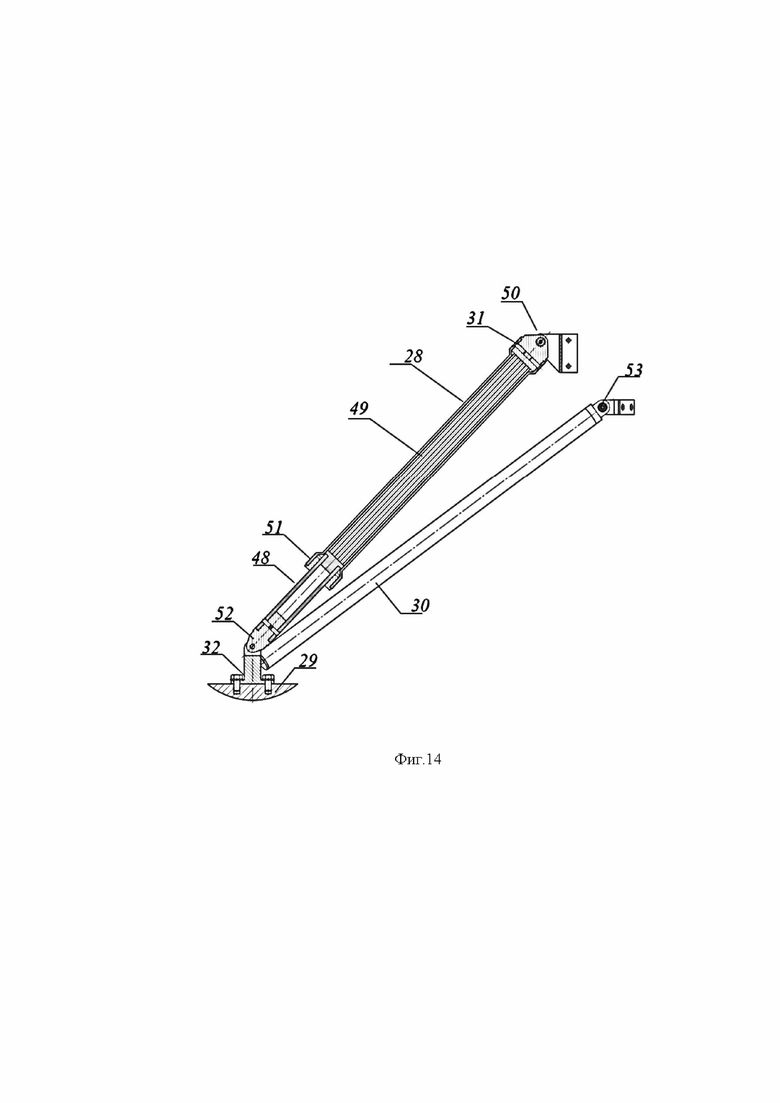
фиг. 14 – посадочная опора в разрезе;
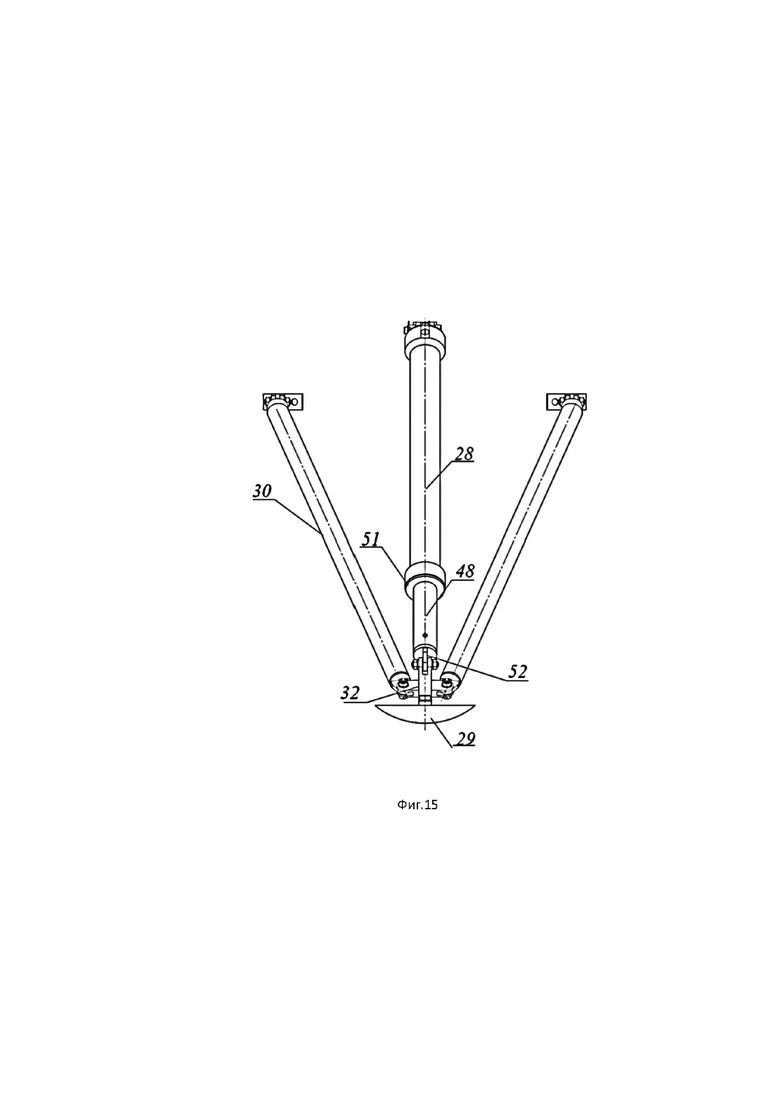
фиг. 15 – посадочная опора;
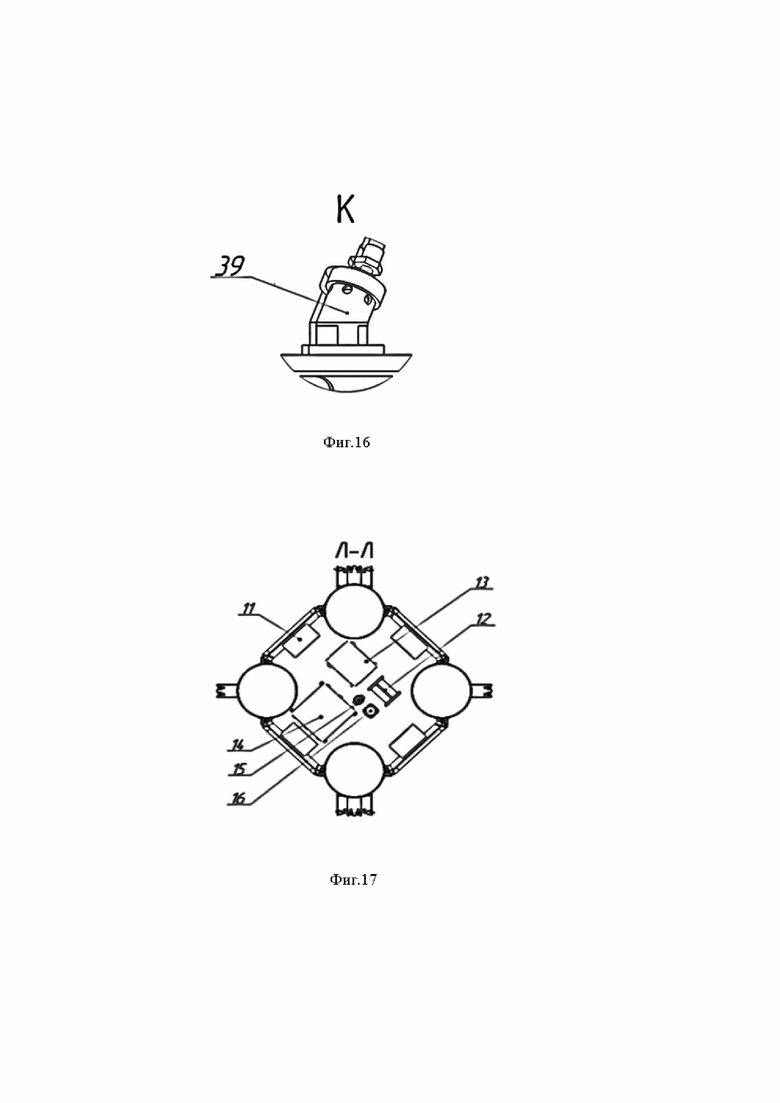
фиг. 16 – вид К с фиг.3 – шаровая опора;
фиг. 17 – вид на разрез Л-Л с фиг.2 – расположение элементов бортового комплекса управления.
Несущая конструкция предлагаемого КА представляет ферму, на которой крепятся элементы системы управления и системы энергообеспечения. Ферменная конструкция относительно легка, проста в изготовлении, обладает высокой жесткостью, достаточно надёжна.
Корпус КА (фиг. 1, 2) представляет конструкцию, состоящую из модуля служебных систем 1 и модуля полезной нагрузки 2.
Модуль служебных систем 1 выполнен как сварная конструкция в форме прямой восьмигранной призмы. Она образована из продольных стоек 5 (фиг. 3) и поперечных силовых элементов 6, жестко закрепленных на боковых гранях восьмигранной призмы. Такая форма имеет пространство для свободного размещения элементов бортового комплекса управления и элементов энергообеспечения внутри модуля 1. Боковые грани с силовыми элементами 6 служат для расположения различного оборудования по восьми направлениям.
На одной свободной боковой грани модуля 1 установлена с помощью сварного соединения рама для дальномера 45 (фиг. 4). Рама 45 выполнена как сварная конструкция в форме прямой треугольной призмы из элементов уголкового профиля, образующих установочную площадку для дальномера 46. На двух других боковых гранях снаружи модуля 1 (фиг. 2) размешены два астродатчика 21, продольные оси которых расположены перпендикулярно друг другу.
На центральной части продольных стоек 5 (фиг.3) модуля служебных систем 1 закреплены два кронштейна 19 (фиг. 9) для узкоугольных камер 20 и два кронштейна 17 (фиг. 8) для широкоугольных камер 18.
На внутренних сторонах четырех боковых граней модуля служебных систем 1 располагаются элементы энергообеспечения 11 (фиг. 17).
Параллельно продольной оси модуля 1 (фиг. 3) расположены четыре сферических бака 7 с компонентами топлива. Они закреплены с помощью шпангоута 8 (фиг.6) и болтового соединения на отведенных силовых элементах 6 продольных стоек 5 (фиг. 3) модуля служебных систем 1. Топливные баки 7 размещены с частичным заглублением внутрь, что уменьшает поперечный размер КА и повышает плотность компоновки.
Бак с газом в форме тора 26 (фиг. 5) располагается в верхней части модуля служебных систем 1. Для закрепления бака 26 используется жесткое крепление с применением штырей 27, которое с помощью болтовых соединений крепится к верхнему поясу поперечных силовых элементов 6 модуля служебных систем 1 (фиг. 5).
Четыре блока двигателей точной коррекции 9 (фиг. 7) расположены снаружи модуля 1 (фиг. 3) непосредственно на топливных баках 7 в кронштейнах 10, что предполагает достаточное удаление от центра масс КА, а также увеличивает управляющие моменты от двигателей точной коррекции 9.
Реализуя продольную конструктивно-компоновочную схему космического аппарата (фиг. 2), модуль полезной нагрузки 2 устанавливается на модуль 1. Модуль 2 включает ферму с одним ярусом треугольных решеток по форме, близкой к усеченной пирамиде, которая создает жесткий пространственный конструктивно-силовой каркас. Поскольку габариты полезного груза 47 (фиг.3) меньше диаметра окружности, вписанной в образованный гранями служебного модуля 1 восьмиугольник, модуль полезной нагрузки 2 имеет форму усеченной пирамиды. Модуль 2 (фиг.2) выполнен из набора стержней 22 и 23, формирующих ярус, и опорных узлов 24 и 25 (фиг.10,11), служащих для стыковки элементов фермы, а также для обеспечения закрепления полезного груза 47 (фиг. 3) и кронштейнов тормозных двигателей 44.
Модуль 2 (фиг. 2) содержит шестнадцать стержней 23, образующих треугольную решетку, и шестнадцать стрежней 22, используемых в качестве поперечных силовых элементов. Модуль 2 содержит два вида опорных узлов: верхнего ряда 24 (фиг. 10) и нижнего ряда 25 (фиг.11). Опорный узел верхнего ряда 24 обеспечивает стыковку модуля 2 и модуля 1 КА.
Четыре кронштейна тормозных двигателей 44 (фиг. 3) устанавливаются с внешней стороны на опорные узлы нижнего ряда 25 (фиг.11) модуля 2. Четыре кронштейна для размещения полезного груза 47 (фиг.3) привариваются с внутренней стороны узлов нижнего ряда 25 (фиг.11) модуля 2. Установка кронштейнов для полезного груза на опорные узлы 25 чередуется с кронштейнами тормозных двигателей 44 (фиг.3).
КА содержит посадочное устройство (фиг. 15), закрепленное на корпусе КА в нижней части модуля служебных систем 1, в состав которого входит четыре посадочные опоры, они предназначены для поглощения кинетической энергии КА при посадке. В состав каждой из опор входит амортизирующая стойка, состоящая из штока 48 и цилиндра 28. Во внутреннем пространстве цилиндра 28 размещается амортизирующий разрушаемый сотовый наполнитель 49 (фиг.14). Верхний конец цилиндра 28 посредством винтов соединяется с крышкой 31. Крышка 31 крепится к модулю 1 посредством шарнирно-болтового соединения (фиг. 12). Цилиндр 28 (фиг. 14) телескопически соединен с подвижным штоком 48. Для снижения трения при движении штока 48 в нижний конец цилиндра 28 ввинчивается втулка 51 из антифрикционного материала. Подвижный шток 48 соединяется с переходником 32 посредством крышки 52. Крышка 52 образует с переходником 32 цилиндрический шарнир. С переходником 32 соединены два подкоса 30, которые крепятся к космическому аппарату через цилиндрические шарниры 53. Опорная тарель 29, расположенная внизу посадочной опоры, крепится к переходнику 32 с помощью болтового соединения.
Функционирование посадочных опор (фиг. 14, 15) начинается с момента контакта одной из тарелей 29 с поверхностью небесного тела. Реакция грунта на тарель 29 создает вращающий момент относительно оси шарнирно-болтового соединения 50. Поворот вокруг этой оси возможен только при поступательном движении штока 48 относительно цилиндра 28 при одновременном смятии наполнителя 49. На деформирование и разрушение наполнителя 49 расходуется кинетическая энергия движения КА, благодаря чему скорость поступательного движения его центра масс снижается до полной остановки.
Плоское движение амортизирующей стойки, состоящей из штока 48 и цилиндра 28 (фиг. 15), обеспечивается симметричным расположением подкосов 30, оси которых пересекаются в плоскости движения амортизирующей стойки. В процессе посадки оба подкоса 30 и переходник 32 вращаются как единое твердое тело вокруг цилиндрических шарниров 53 (фиг. 14). Движение амортизирующей стойки возможно только в одном направлении, так как в другом направлении угол поворота ограничивается конструкцией шарнирно-болтового соединения 50 с корпусом.
Сверху на модуле служебных систем 1 установлена рама двигателя орбитального маневрирования 4 (фиг.2), её положение фиксируется с помощью каркаса закрепления 33 (фиг.5). Рама 4 состоит из каркаса закрепления 33 (фиг. 5), узла тарировки вектора тяги относительно центра масс 34 и рамы карданного подвеса 35 (фиг.2).
Каркас закрепления 33 обеспечивает связь и передачу нагрузок от двигателя орбитального маневрирования 42 (фиг.2) к модулю 1. Каркас закрепления 33 состоит из восьми продольных балок 37 с прямоугольным сечением, закрепленных одним концом консольно посредством сварки к уголкам 36 (фиг.2), размещенным на продольных стойках 5 (фиг.3) модуля 1. Закрепление второго конца балок 37 аналогично первому, что обеспечивает стыковку с узлом тарировки вектора тяги 34 (фиг.5).
Узел тарировки вектора тяги 34 (фиг. 5) относительно центра масс состоит из рамы 38, шести шаровых опор 39 (фиг.16) и трех стержней 48 (фиг.2). Рама 38 (фиг. 5) представляет собой кольцо, к которому привариваются стыковочные элементы (уголки) 36 (фиг.2) каркаса закрепления 33 (фиг.5), а также крепятся с помощью болтового соединения корпусы трёх шаровых опор 39 (фиг.16). Основная функция шаровой опоры 39 – фиксация положения двигателя орбитального маневрирования 42 (фиг.2) относительно центра масс КА.
По три шаровые опоры 39 (фиг. 16) расположены на верхней поверхности рамы 38 (фиг.5) в форме кольца и на нижней поверхности рамы карданного подвеса 35 (фиг.2). Передача усилий обеспечивается тремя стержнями 48 (фиг.2). Конец пальца шаровой опоры 39 (фиг.16) со стороны резьбы стыкуется со стержнем 48, закрепление обеспечивается с помощью накидной гайки.
Для регулирования вектора тяги двигателя орбитального маневрирования 42 (фиг. 2) предусмотрен карданный подвес 35. Карданный подвес 35 состоит из двух рам 40 и 41 (фиг.3). Неподвижная рама карданного подвеса 40, положение которой фиксируется с помощь узла тарировки тяги относительно центра масс КА 34 (фиг. 5), закрепляется на корпусе КА. Имеет площадки для крепления трёх шаровых опор и двух рулевых машинок и является неподвижной относительно корпуса КА. Подвижная рама карданного подвеса – это кольцо 41 (форма у него как у восьмигранника, но название -кольцо) (фиг.3) Кольцо 41 подвижно относительно рамы 40 – вращается в перпендикулярной плоскости. Внутри кольца 41 размещают в креплении двигатель 42 (фиг.2), который в свою очередь вращается в перпендикулярной плоскости относительно кольца 41(фиг.3). Когда двигатель орбитального маневрирования 42 (фиг. 2) вращается с одной степенью свободы в этом кольце, а само кольцо 41 (фиг. 3) – вместе с двигателем орбитального маневрирования 42 (фиг. 2) вращается в перпендикулярной плоскости относительно корпуса КА. Осуществляется поворот с двумя степенями свободы. Кольцо 41(фиг. 3) имеет цапфу для крепления кольца в подшипнике кронштейна, который установлен на раме карданного подвеса 40. Цапфы камеры двигателя орбитального маневрирования 42 (фиг. 2) крепятся в подшипниках, установленных во вваренных в кольцо стаканах.
Управление поворотом камеры сгорания двигателя орбитального маневрирования 42, в которой происходит смешение компонентов топлива, (фиг. 2) осуществляется двумя рулевыми машинками 43. Одна из них управляет положением камеры сгорания двигателя орбитального маневрирования 42 относительно кольца 41 (фиг.3), другая управляет положением – кольца 41 относительно корпуса КА.
КА обеспечивает доставку полезного груза на космическое тело естественного происхождения, обладающее малым гравитационным полем и неспособное к активным манёврам уклонения, таким как астероиды, кометы, малые спутники планет.
Маневрирование КА в космическом пространстве обеспечивает использование карданного подвеса для двигателя орбитального маневрирования. Поворот двигателя орбитального маневрирования осуществляется с двумя степенями свободы за счет применения промежуточного устройства – кольца.
Точная коррекция положения КА в космическом пространстве обеспечивается за счет работы блоков двигателей точной коррекции. Они расположены на сферических топливных баках, что обеспечивает достаточное удаление от центра масс КА и увеличивает управляющие моменты от двигателей точной коррекции.
После нахождения поверхности подходящей для посадки, КА сближается с поверхностью космического объекта. Далее фиксируется на его поверхности с помощью работы двигательной установки и посадочного устройства, которые позволяют сориентировать КА относительно поверхности космического объекта.
В состав посадочного устройства входят четыре посадочные поры, в конструкцию которых входит сотовый наполнитель. На деформирование и разрушение наполнителя расходуется кинетическая энергия движения КА, благодаря чему скорость поступательного движения его центра масс снижается до полной остановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБСЛУЖИВАНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ И МНОГОРАЗОВАЯ АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342288C1 |
| Космический аппарат | 2017 |
|
RU2673447C9 |
| КОСМИЧЕСКИЙ АППАРАТ, ЕГО МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ И МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2016 |
|
RU2617162C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| Способ разгрузки на поверхности Луны габаритных полезных грузов с посадочной платформы космического аппарата на лунное транспортное средство и устройства для реализации этого способа | 2024 |
|
RU2837430C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОСМИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2131383C1 |
| МНОГОРАЗОВАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ МАССОВОЙ ДОСТАВКИ С ОКОЛОЗЕМНОЙ ОРБИТЫ НА ОКОЛОЛУННУЮ ОРБИТУ ТУРИСТОВ ИЛИ ПОЛЕЗНЫХ ГРУЗОВ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2736657C1 |
| АВИАЦИОННО-КОСМИЧЕСКИЙ СТАРТОВЫЙ КОМПЛЕКС "МАРС" | 2001 |
|
RU2215673C2 |

Изобретение относится к космической технике, а именно к устройству космического аппарата, целью которого является доставка полезного груза на космическое тело естественного происхождения, обладающее малым гравитационным полем и неспособное к активным манёврам уклонения, таким как астероиды, кометы, малые спутники планет. Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем, содержащий соединенные друг с другом модуль служебных систем и модуль полезной нагрузки, причем модуль служебных систем выполнен как сварная металлическая конструкция в виде прямой восьмигранной призмы из жестко соединенных продольных стоек и поперечных силовых элементов, на нижней части модуля служебных систем 1 установлено посадочное устройство, включающее четыре посадочные опоры, состоящие из телескопически соединенных подвижного штока и цилиндра с амортизирующим сотовым наполнителем, соединенных с подкосами, которые, в свою очередь, и соединены с помощью болтового соединения с расположенными внизу штока опорными тарелями. После нахождения поверхности, подходящей для посадки, КА сближается с поверхностью космического объекта. Предлагаемый КА фиксируется на поверхности космического тела с помощью работы двигательной установки и посадочного устройства, которые позволяют сориентировать КА относительно поверхности космического тела, таким образом осуществляется доставка грузов. 17 ил.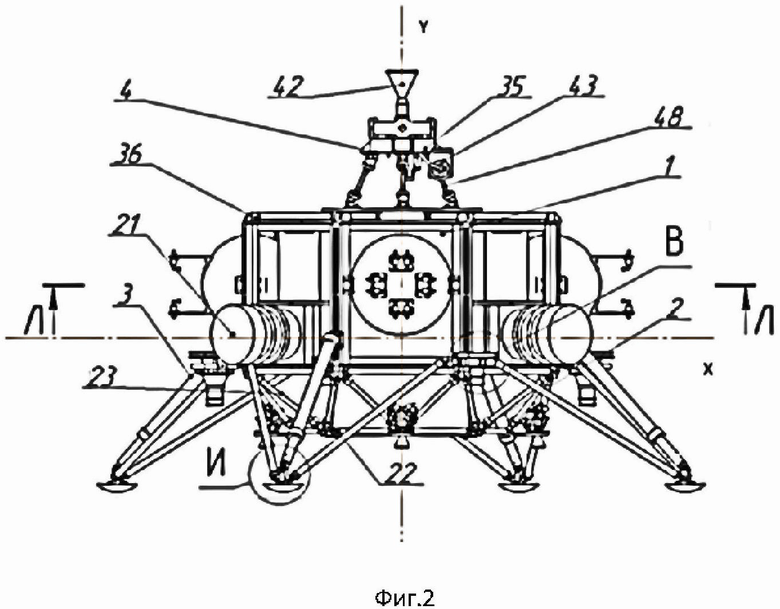
Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем, содержащий соединенные друг с другом модуль служебных систем и модуль полезной нагрузки, причем модуль служебных систем выполнен как сварная металлическая конструкция в виде прямой восьмигранной призмы из жестко соединенных продольных стоек и поперечных силовых элементов, на одной из граней призмы установлен на сварной раме в форме прямой треугольной призмы дальномер, на двух других гранях закреплены два астродатчика, продольные оси последних расположены под углом 90º относительно друг друга, на четырёх продольных стойках модуля служебных систем установлены на кронштейнах две узкоугольные и две широкоугольные камеры, с внутренней стороны четырех боковых граней модуля служебных систем установлены элементы энергообеспечения, параллельно продольной оси указанного модуля жестко закреплены на четырех противоположных отведенных силовых перегородках продольных стоек с заглублением внутрь при помощи шпангоутов и болтовых соединений четыре сферических топливных бака, на топливных баках в кронштейнах закреплены четыре блока двигателей точной коррекции, на верхней части модуля служебных систем закреплен бак со сжатым газом, выполненный в форме тора; модуль полезной нагрузки в форме усеченной восьмигранной пирамиды установлен продольно на модуль служебных систем, указанный модуль состоит из шестнадцати стержней, образующих треугольную решетку, и шестнадцати поперечных силовых элементов с опорными узлами нижнего и верхнего пояса, причем опорный узел верхнего пояса соединяет модуль служебных систем с модулем полезной нагрузки; на закрепленные с внешней стороны указанного модуля опорные узлы нижнего пояса установлены на кронштейнах четыре тормозных двигателя, а на закрепленные с внутренней стороны опорные узлы, чередующиеся с внешними, установлены кронштейны для закрепления полезного груза внутри модуля полезной нагрузки; в верхней части модуля служебных систем на раме установлен двигатель орбитального маневрирования, рама двигателя состоит из установленного на продольных стойках модуля служебных систем каркаса закрепления, узла тарировки вектора тяги относительно центра масс и рамы карданного подвеса, каркас закрепления включает восемь продольных балок прямоугольного сечения, жестко закрепленных одним концом с продольными стойками рамы модуля служебных систем, а вторым – с узлом тарировки, который состоит из рамы в форме кольца с приваренными к нему стыковочными элементами в виде уголков, крепящихся болтовым соединением с шаровыми опорами, установленными с двух сторон стержней узла тарировки и закрепленными с одной стороны – на верхней поверхности рамы в форме кольца, а с другой стороны – на неподвижной раме карданного подвеса, в нижней части модуля служебных систем 1 установлено посадочное устройство, включающее четыре посадочные опоры, состоящие из телескопически соединенных подвижного штока и цилиндра с амортизирующим сотовым наполнителем, соединенных с подкосами, которые, в свою очередь, и соединены с помощью болтового соединения с расположенными внизу штока опорными тарелями.
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 2015 |
|
RU2621132C1 |
| КОСМИЧЕСКИЙ АППАРАТ, ЕГО МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ И МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2016 |
|
RU2617162C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247683C1 |
| US 6196501 B1, 06.03.2001 | |||
| US 20140239125 A1, 28.08.2014. | |||

