Область техники, к которой относится изобретение
Предлагаемое изобретение относится к области практической космонавтики, а именно к современным технологиям изучения и освоения Луны, включая создание на ее поверхности постоянно действующих научно - технологических станций. На данный момент речь идет о создании, в кооперации с Китайской Народной Республикой и другими странами, Международной Научной Лунной Станции (МНЛС) периодического посещения экипажами космонавтов [1, 2]. Во время экспедиций экипажи космонавтов оснастят лунную станцию приборами и оборудованием, работающими в автоматических режимах с периодической проверкой, наладкой и модернизацией этого оборудования экипажами лунных экспедиций посещения. В дальнейшем лунную станцию, очевидно, будут выводить на режим постоянного пребывания сменных экипажей, по примеру функционирования орбитальной Международной Космической Станции (МКС).
Уровень техники
Реализация предлагаемого изобретения позволит решить одну из важных технических проблем первого этапа создания МНЛС - освоение и отработка новых, не востребованных ранее роботизированных способов и технологий разгрузки на поверхности Луны габаритных полезных грузов (ПГ) большой массы. Например, отдельных модулей МНЛС, доставляемых на поверхность Луны на посадочных платформах межпланетных космических аппаратов (КА). Примерные габариты подобных модулей были определены еще в первых, для СССР, инженерных разработках проектов лунной базы [3, 4]: диаметр не менее 4 м, длина не менее 8 м. О массе модулей МНЛС можно судить по массе реальных модулей МКС, которые эксплуатируются в открытом космосе. Так, например, многофункциональный лабораторный модуль «Наука», доставленный на МКС в 2021 году, имеет массу 20350 кг [5].
Новая техническая проблема еще более усложняется необходимостью разгрузки габаритных модулей не на лунный реголит, а непосредственно на грузовую платформу лунных транспортных средств (ТС) для последующей транспортировки и монтажа этих модулей на месте строительства МНЛС.С учетом этого, предлагаемое техническое решение должно обеспечивать автоматизацию процесса разгрузки, исключить опасные контакты внешних поверхностей модулей с лунным реголитом, обеспечить получение требуемого технического результата с минимальными временными, энергетическими и финансовыми затратами.
Что касается доставки габаритных модулей МЛНС на поверхность Луны, то необходимо ориентироваться на отработанные в России, Китае и США, способы доставки КА с ПГ, закрепленным вертикально на верхней площадке посадочной платформы, под головным обтекателем ракеты -носителя, таким образом, чтобы ось симметрии ПГ, проходящая через его центр масс, совпадала с вертикальной осью симметрии ракеты - носителя. Заключительным этапом доставки является вертикальная посадка лунного КА с габаритным ПГ на поверхность Луны.
Здесь уместно отметить, что на первых этапах изучения Луны превалировали динамические способы сравнительно мягкой посадки лунных КА типа советских автоматических станций Луна-9 и Луна-13 [6]. Такая посадка обеспечивалась тормозной двигательной установкой, снижавшей скорость полета КА с 2600 км/с до нескольких м/с, и специальными амортизаторами в виде быстро надувных баллонов, которые полностью гасили кинетическую энергию посадочной платформы во время первого взаимодействия с грунтом и последующих подскоков. Примерно таким же динамическим был процесс посадок советских марсианских посадочных блоков КА Марс-3, Марс-6, Марс-7 [7], которые, в дополнение к изложенному, были снабжены еще и тормозными парашютами для атмосферного участка траектории посадки. Подобные способы посадки, предполагают динамическое, ударное взаимодействием посадочных платформ лунных и марсианских КА с небесным телом. Они совершенно непригодны для доставки на Луну габаритных модулей МНЛС большой массы, представляют сегодня только исторический интерес и в настоящей заявке не рассматриваются.
Современный уровень техники при доставке на Луну габаритных ПГ большой массы предусматривает мягкую посадку КА на предварительно выбранных с помощью лунных орбитальных КА, сравнительно ровных участках лунной поверхностях. Для этого траектория движения КА на последнем этапе посадки формируется бортовыми двигателями таким образом, чтобы горизонтальная составляющая скорости перед посадкой была равна нулю, а вертикальная составляющая была не более 1 м/с. Именно такие требования сформулировал С.П. Королев в своей исторической справке [8].
Мягкая посадка происходит на опоры посадочной платформы, которая при этом ориентируется по нормали к опорной поверхности. В идеальном случае такая посадка представляет собой свободное падение КА на поверхность Луны с небольшой высоты. Поэтому ее называют также вертикальной посадкой или посадкой по падающей траектории. Важной деталью такой посадки является размещение опор на нижней части посадочной платформы, там, где располагается тормозной двигатель, обеспечивающий сход КА с орбиты спутника Луны и торможение при посадке. Таким образом, ниже рассматриваются космические полеты на Луну и Марс, когда вертикальные взлеты ракет - носителей завершаются вертикальными посадками посадочных платформ лунных и марсианских КА.
Такой способ посадки на поверхность Луны был впервые отработан при посадке американских КА серии Survejor [9], а также при посадке советских КА Луна-16 и Луна-20 [10]. Но все перечисленные КА не требовали разгрузки, контактное взаимодействие их бортовых приборов с грунтом осуществлялось с помощью манипуляторов.
Опубликованные на данный момент способы и устройства разгрузки ПГ на поверхность Луны и Марса, являющиеся аналогами и прототипом настоящего изобретения иллюстрируются фиг. 1-7.
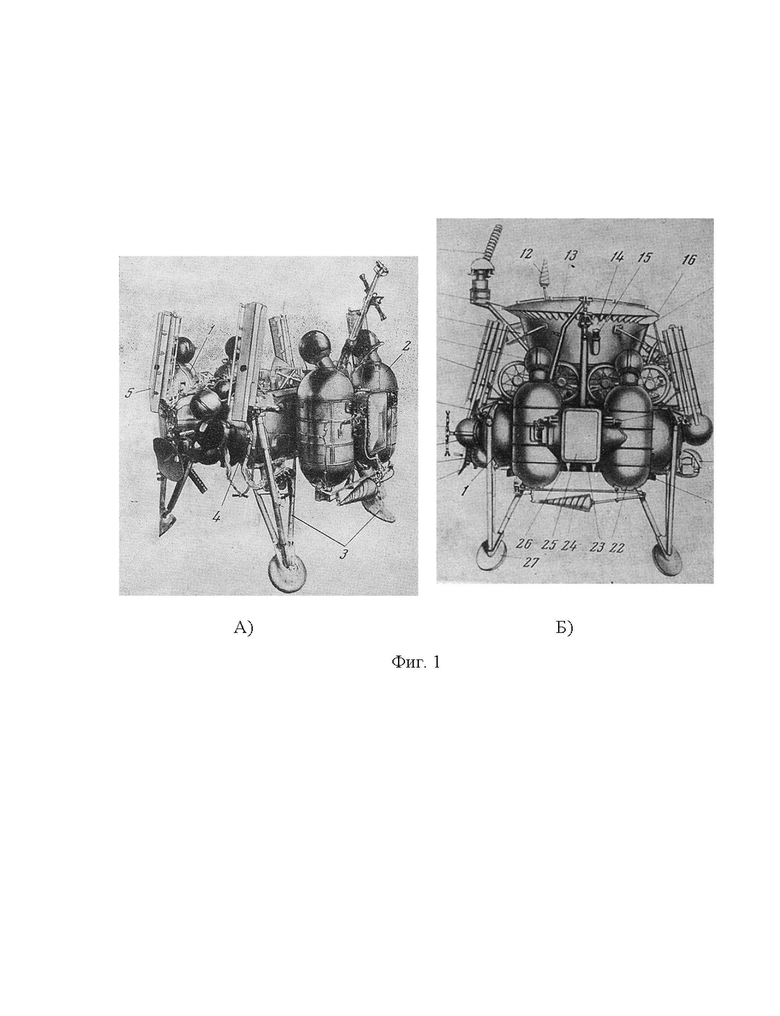
Фиг. 1. Схема размещения Лунохода-1 и аппарелей для его съезда на лунный грунт на посадочной платформе КА Луна-17. 3 - опоры КА Луна-17, 5 - аппарели [3].
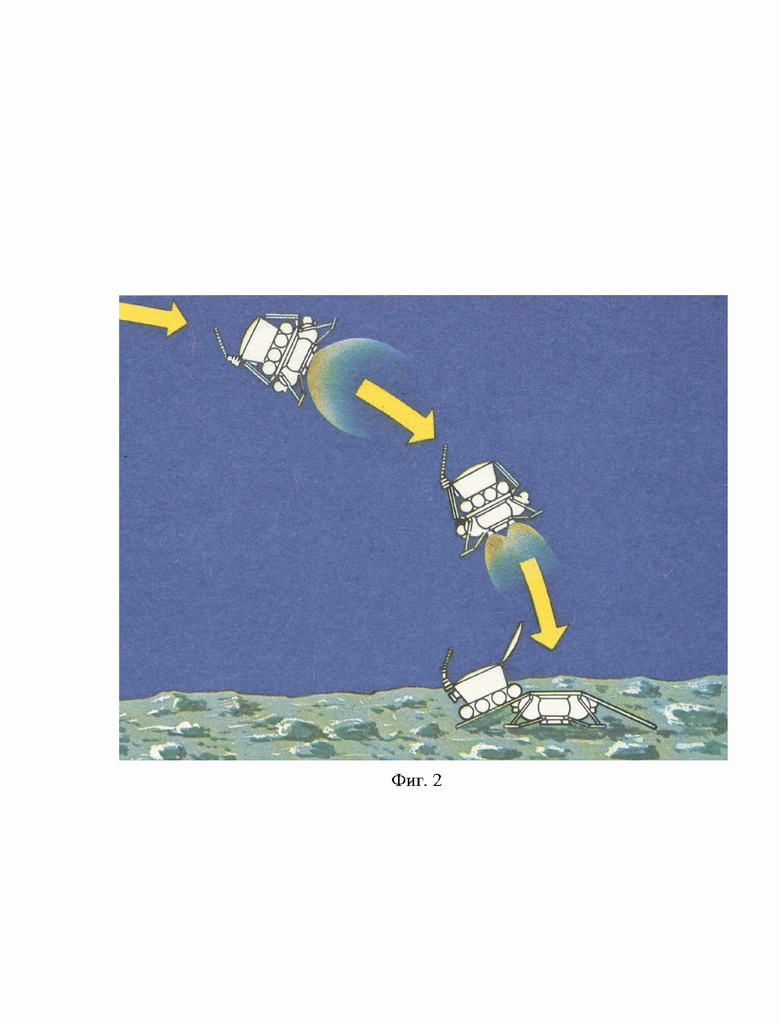
Фиг. 2. Схема посадки станций Луна-17 и Луна-21 и разгрузки советских Луноходов 1 с посадочной платформы этих станций на поверхность Луны [4].
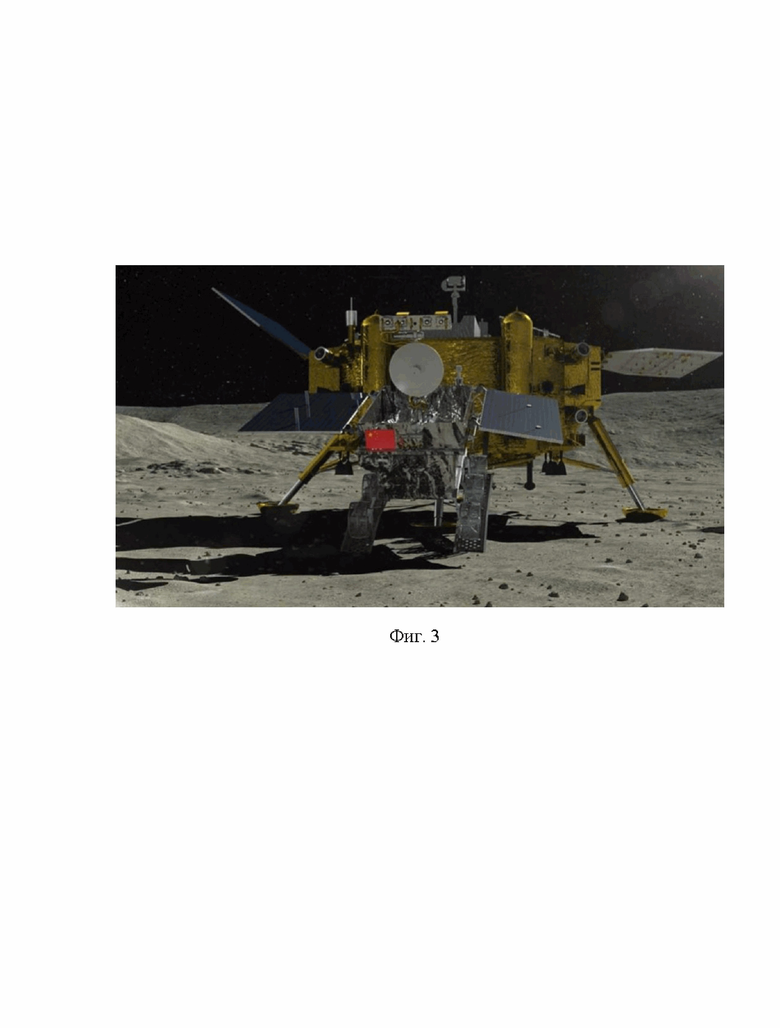
Фиг. 3. Съезд по аппарелям на поверхность обратной (невидимой с Земли) стороны Луны китайского лунохода Юйту-2 [11].
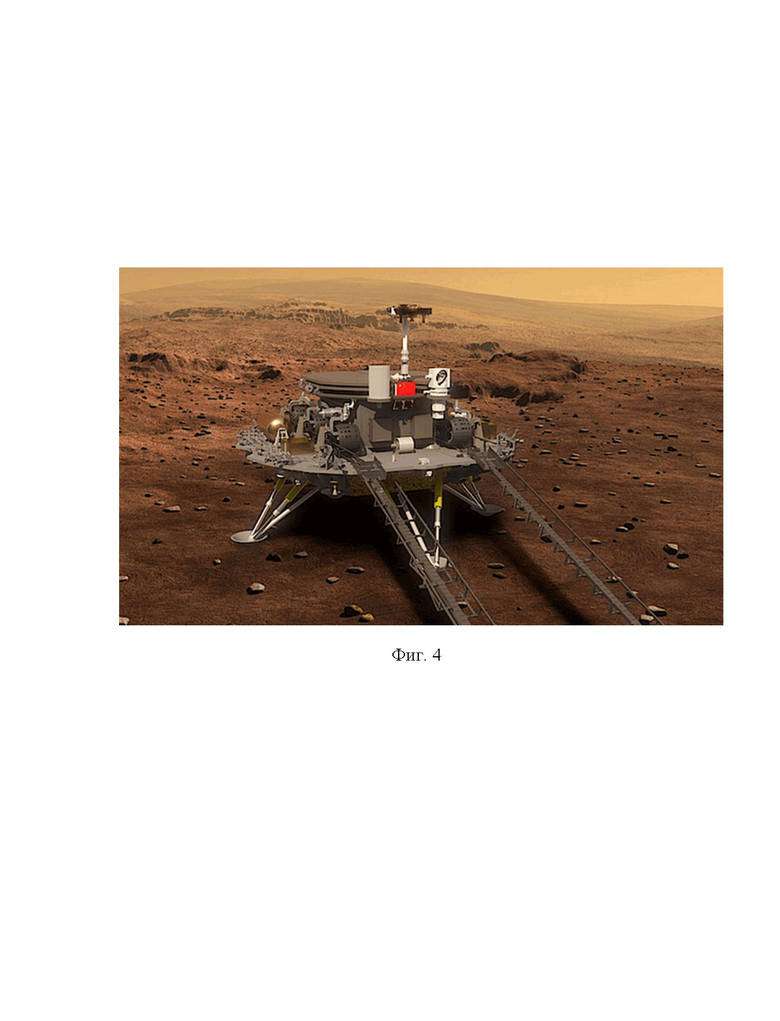
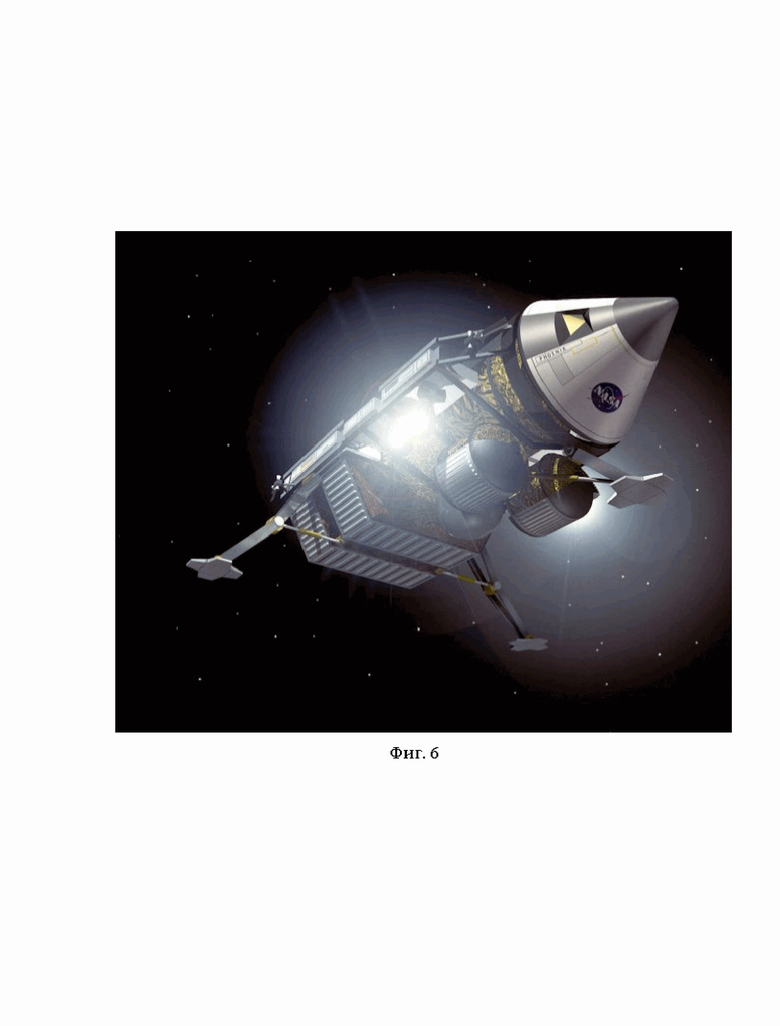
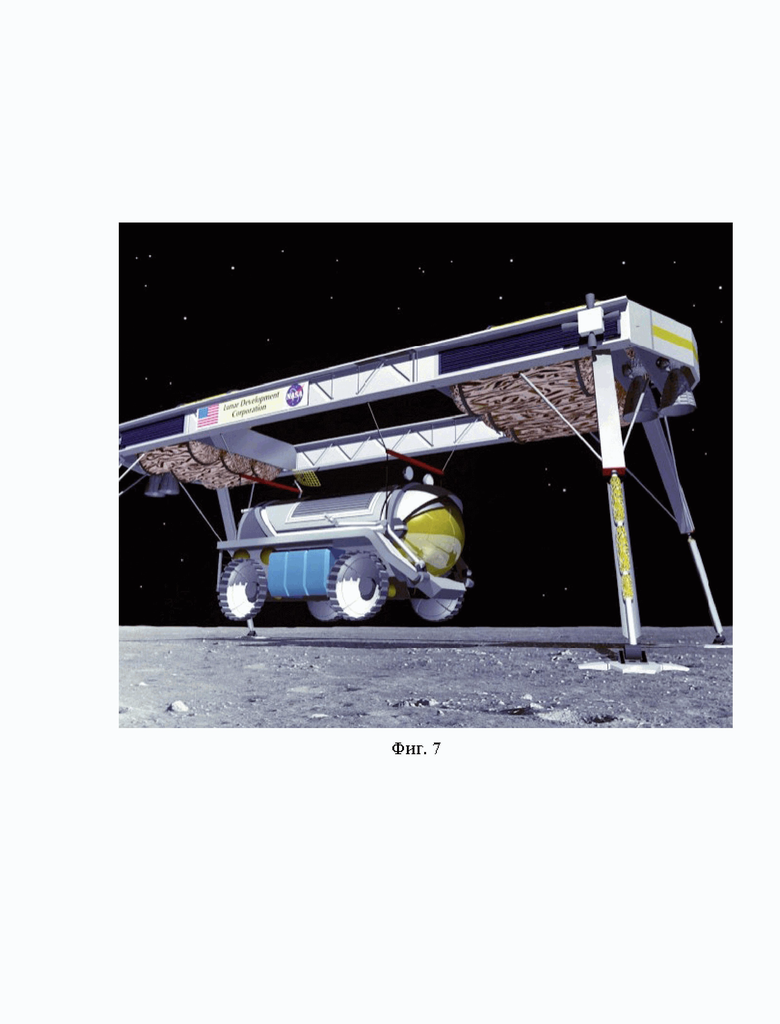
Фиг. 4. Подготовка китайского марсохода Чжунчжу к съезду с посадочной платформы космического аппарата Ченьэ - 5 на поверхность Марса [12]. Фиг. 5. Разгрузка марсохода Curiosity поверхность Марса с посадочной платформы космического аппарата с помощью «небесного крана» [13]. Фиг. 6. Проектная разработка способа мягкой посадки на Луну космического аппарата с полезным грузом в виде мобильного модуля лунной станции при обеспечении горизонтальной ориентации этого аппарата относительно опор посадочной платформы и, следовательно, относительно лунной поверхности. Этап выбора посадочной площадки. [14]. Фиг. 7. Проектная разработка способа мягкой посадки на Луну космического аппарата с полезным грузом в виде мобильного модуля лунной станции при обеспечении горизонтальной ориентации этого аппарата относительно опор посадочной платформы и, следовательно, относительно лунной поверхности. Этап разгрузки мобильного модуля лунной базы после посадки [14].
Впервые рассмотренный способ мягкой посадки КА с ПГ, который нужно было разгрузить на поверхности Луны, был реализован 17 ноября 1970 года на сравнительно ровной площадке в районе Моря Дождей. Посадку произвела советская станция Луна - 17, а полезный груз представлял собой передвижную автоматическую лабораторию «Луноход - 1» (фиг. 1) [11]. Таким же образом 16 января 1973 года советская станция «Луна-21» доставила на Луну «Луноход-2». Оба самоходных аппарата были разгружены с помощью одной из двух аппарелей, развернутых в противоположные стороны и соединявших посадочную платформу с грунтом (фиг. 2) [12]. Масса Лунохода-1 составила 756 кг, масса Лунохода-2 составила 840 кг [13].
Способ разгрузки габаритных ПГ с посадочных платформ КА с помощью аппарелей является аналогом предлагаемого изобретения. Впоследствии этот способ применялся также при разгрузке на поверхности Луны китайских луноходов «Yutu» и «Yutu-2» (фиг. 3) [14], а также использовался, с некоторыми дополнительными операциями, обусловленными особенностями посадки в марсианской атмосфере, при разгрузке с посадочной платформы китайского марсохода Чжужун (фиг. 4) [15].
Главный недостаток перечисленных аналогов заключается в том, что реализованный в них способ рассчитан на разгрузку только самоходного оборудования, то есть луноходов и марсоходов. Использование аппарелей для разгрузки иного оборудования, например, рассматриваемых модулей МНЛС, не безопасно для космонавтов и для сохранности этого оборудования. Такие длинные (8 м) модули, закрепленные на посадочной платформе КА, необходимо сначала каким-то образом кантовать, то есть повернуть из вертикального положения в горизонтальное. Только затем модули можно спускать по аппарелям на поверхность Луны, не допуская их неуправляемого движения и ударов. Опасность динамических нагрузок, действующих на ПГ при кантовании, сползании или качении по аппарелям, возрастает при увеличении его габаритов и массы.
Выполнение перечисленных операций непосредственно космонавтами потребует значительных физических усилий и поэтому неприемлемо. Разгрузку можно осуществлять только с помощью предварительно доставленных на Луну специальных грузоподъемных средств, закрепленных на мобильных платформах - аналогах наземных автокранов. Это потребует времени для создания и доставки на Луну нового оборудования и потребует дополнительного финансирования.
Эти недостатки свойственны еще одному способу разгрузки габаритных ПГ большой массы на поверхность небесных тел путем организации на заключительном этапе траектории посадки, так называемого «небесного крана». Этот аналог был отработан при посадке на Марс американских марсоходов Curiosity и Perseverance, массой около тонны каждый. ПГ, в виде перечисленных марсоходов, в этом случае крепится не на верхней площадке посадочной платформы КА а, напротив, под этой платформой (фиг. 5) [16]. Посадочный блок имеет четыре дублированных реактивных двигателя, способных в течение некоторого времени удерживать всю конструкцию над выбранным для посадки участком поверхности Марса. После зависания над поверхностью Марса на высоте 10-15 м марсоход спускается на тросах лебедки, находящейся на посадочном блоке. Одновременно марсоход развертывает свою ходовую часть из транспортировочного положения в рабочее с помощью собственных приводов. После контакта колес марсохода с поверхностью Марса и ослабления натяжения тросов, все связи тросов с марсоходом автоматически разрываются. Затем зависший посадочный блок вместе со ставшими свободными концами тросов удалялся с помощью тех же реактивных двигателей на достаточное расстояние от места посадки, исключавшее какие-либо помехи движению марсохода.
Недостатком этого способа также является ограниченность его применения исключительно только для разгрузки самоходных ПГ. Самоходные ПГ не нужно кантовать, они закреплены под посадочной платформой колесами вниз. Отсутствуют высокие требования по точности соблюдения координат посадки КА, достаточно посадить на любой площадке, где углы наклона поверхности исключают возможность опрокидывания КА с доставленным грузом. Самоходный аппарат приедет от места посадки к месту строительства МНЛС самостоятельно.
Когда же речь идет о разгрузке ПГ в виде герметичных модулей лунной станции, то при разгрузке необходимо добиться точного зависания «небесного крана» над транспортным средством, которое затем доставит этот модуль к месту монтажа станции. Ведь такой ПГ нельзя положить при разгрузке на грунт, поскольку в этом случае для его последующей транспортировки опять таки потребуется не только транспортное, но и еще и грузоподъемное средство, предназначенное для погрузки модуля станции с поверхности Луны на грузовую площадку транспортного средства.
Прототипом предлагаемого способа разгрузки габаритных ПГ большой массы, например, модулей лунной станции, является способ, отраженный в проекте NASA International Lunar Resources Exploration Concept (фиг. 6, 7) [17]. Но, как видно из этого рисунка, этот способ разгрузки предполагает посадку КА на поверхность Луны в горизонтальной конфигурации связки «посадочная платформа КА - герметичный модуль». Это значит, что операция кантования модуля выполняется во время посадочного маневрирования КА, до его посадки на собственные опоры. В таком случае посадочная платформа КА представляет собой что-то подобное портальному крану. Разгрузка модуля осуществляется под действием гравитационного поля Луны с помощью собственного бортового устройства в виде двух лебедок.
Главный недостаток этого способа разгрузки - необходимость разработки новых средств доставки габаритных ПГ цилиндрической формы и большой массы на поверхность Луны, обеспечивающих горизонтальную конфигурацию этих цилиндров во время посадки. Это совершенно новые концепции и технологии, которые принципиально вполне возможны, но, в настоящее время просто не существуют.
Задачей настоящего изобретения является разработка способа разгрузки габаритных ПГ большой массы, (например, в виде модулей для лунной станции), которые обеспечили бы роботизированную, надежную и безопасную технологию разгрузки этих ПГ с посадочной платформы КА на борт специального лунного транспортного средства (ТС), при сохранении уже достаточно отработанных способов доставки и мягкой посадки этих КА на поверхность Луны и других небесных тел.
Раскрытие сущности изобретения
Сущность предлагаемого изобретения поясняется фиг. 8-15. Для достижения требуемого технического результата предлагаемый способ разгрузки габаритного ПГ большой массы включает следующие операции: кантование ПГ из вертикального в горизонтальное положение, последующее опускание ПГ в горизонтальном положении на посадочную платформу КА под действием гравитационного поля Луны со страховкой от динамических нагрузок, а также линейное перемещение ПГ с посадочной платформы КА на грузовую платформу ТС с помощью собственного разгрузочного и страховочно-движительного оборудования.
Для практического достижения технического результата описанным способом предлагается новое устройство разгрузки габаритных ПГ, включающее посадочную платформу КА с закрепленным на ее верхней части ПГ и с опорами в своей нижней части, поддерживающими этот КА на лунной поверхности, специальное лунное ТС с грузовой платформой, ориентированной таким образом, чтобы ее продольная ось была соосна оси ПГ в тот момент, когда ПГ занимает горизонтальное положение на посадочной платформе. Для безопасного обеспечения всех операций разгрузки (кантование ПГ, укладка ПГ в горизонтальном положении на посадочную платформу, перемещение ПГ в продольном направлении на грузовую платформу ТС с минимальным сопротивлением движению) в режимах автоматического управления, устройство, кроме того, включает: две направляющие салазки, закрепленные на боковой поверхности ПГ вдоль его продольной оси симметрично относительно осевого сечения, проходящего через его центр масс; две вертикальные стойки, закрепленные на посадочной платформе с установленными в их верхней части тросовыми блоками; два шарнирных подвеса ПГ, оси которых зафиксированы от продольных перемещений свободно вращающимися цапфами, закрепленными на боковых поверхностях ПГ симметрично относительно осевого сечения на одном уровне с его центром масс, но со смещением «l» в плоскости осевого сечения, в направлении, перпендикулярном оси ПГ; две лебедки, закрепленные на посадочной платформе, тросы которых связывают их барабаны через упомянутые тросовые блоки с соответствующими шарнирными подвесами ПГ; поддерживающие ролики, свободно вращающиеся относительно горизонтальных осей и установленные на обоих сторонах посадочной платформы КА таким образом, что после кантования и опускания ПГ, он встает на эти ролики своими направляющими салазками; две страховочно-движительные лебедки, размещенные на корме, на обоих бортах грузовой платформы ТС, концы тросов которых закреплены в такелажных точках ПГ.
Для повышения надежности и безопасности разгрузки и исключения физического участия космонавтов в процессах всех перемещений ПГ, устройство снабжено дополнительными компонентами:
- на грузовой платформе ТС установлены поддерживающие свободно вращающиеся ролики;
- с целью упрощения операции линейного перемещения ПГ, на посадочной платформе КА и на грузовой платформе ТС установлены взаимодействующие части стыковочно-сцепного устройства, обеспечивающего возможность стыковки посадочной и грузовых платформ таким образом, чтобы образовать единую роликовую дорожку для удобства линейного перемещения ПГ;
- с целью повышения качества автоматической стыковки, ТС, кроме тягового и рулевого приводов каждого колеса, снабжено приводами активной подвески, что обеспечивает возможность достижения в процессе маневрирования и регулирования клиренса соосного пространственного положения осей двух частей стыковочного устройства, необходимого для правильной стыковки посадочной платформы КА с грузовой платформой ТС;
- для дистанционного контроля операции погрузки ПГ на ТС установлены бортовые видеокамеры;
- с целью повышения надежности и безопасности разгрузки, опоры посадочной платформы КА снабжены приводными механизмами и аппаратурой автоматического регулирования длины опор таким образом, чтобы получить максимально возможное выравнивание положения посадочной платформы лунного КА относительно горизонтального уровня.
Краткое описание графических материалов
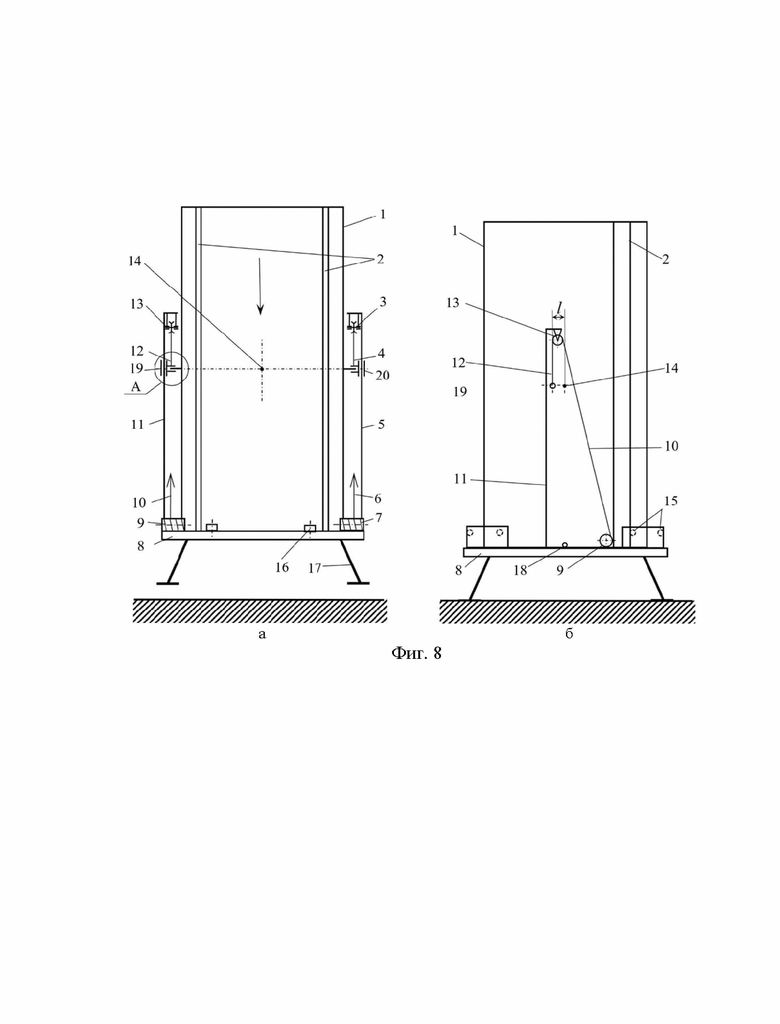
Фиг. 8, на которой изображена схема посадки (а) и ориентация (б) посадочной платформы КА с закрепленным на ней ПГ (стрелкой показан вектор скорости посадки КА), где:
1 - ПГ; 2 - направляющие салазки на ПГ; 3, 13 - тросовый блок правый и левый соответственно; 4, 12 - шарнирный подвес правый и левый соответственно; 5, 11 - вертикальная стойка правая и левая соответственно; 6, 10 - трос правой и левой лебедки соответственно; 7,9- лебедка правая и левая соответственно; 8 - посадочная платформа; 14 - центр масс ПГ; 15 - ролики; 16 - пиротехнические болты крепления ПГ на посадочной платформе; 17 - опоры посадочной платформы; 18 - такелажные точки по обеим сторонам основания ПГ; 19, 20 - направляющие шарнирных подвесов (на схеме (б) -направляющие шарнирных подвесов условно не показаны); l - смещение оси шарнирного подвеса относительно центра масс ПГ.
Фиг. 9, на которой изображена компоновочная схема шарнирных подвесов поз. 4, 12 ПГ поз. 1 на тросах поз. 6 и 10 (фиг. 8), где:
21 - цапфа; 22 - тележка, обеспечивающая исключительно вертикальное перемещение шарнирного подвеса; 23 - продольный паз в стойке 11; 24 - пиротехнические болты для отделения шарнирных подвесов от ПГ после завершения такелажных операций по установке ПГ в горизонтальное положение.
Фиг. 10, на которой изображена схема стыковки ТС с посадочной платформой КА для операции перегрузки ПГ, где:
25, 26 - четырехколесные специальные транспортные средства с грузовыми платформами; 27, 28 - стыковочно-сцепное устройство транспортных средств с посадочной платформой и между собой соответственно; 29, 30 - свободно вращающиеся ролики посадочной платформы КА и грузовой платформы ТС соответственно.
Фиг. 11, на которой изображена схема поворота ПГ на посадочной платформе КА, где:
31, 32 - страховочные тросы и лебедки для страховки кантования ПГ, расположенные по бортам грузовой платформы ТС, соответственно; 33, 34 -направление одновременного вертикального перемещения и поворота ПГ соответственно при кантовании.
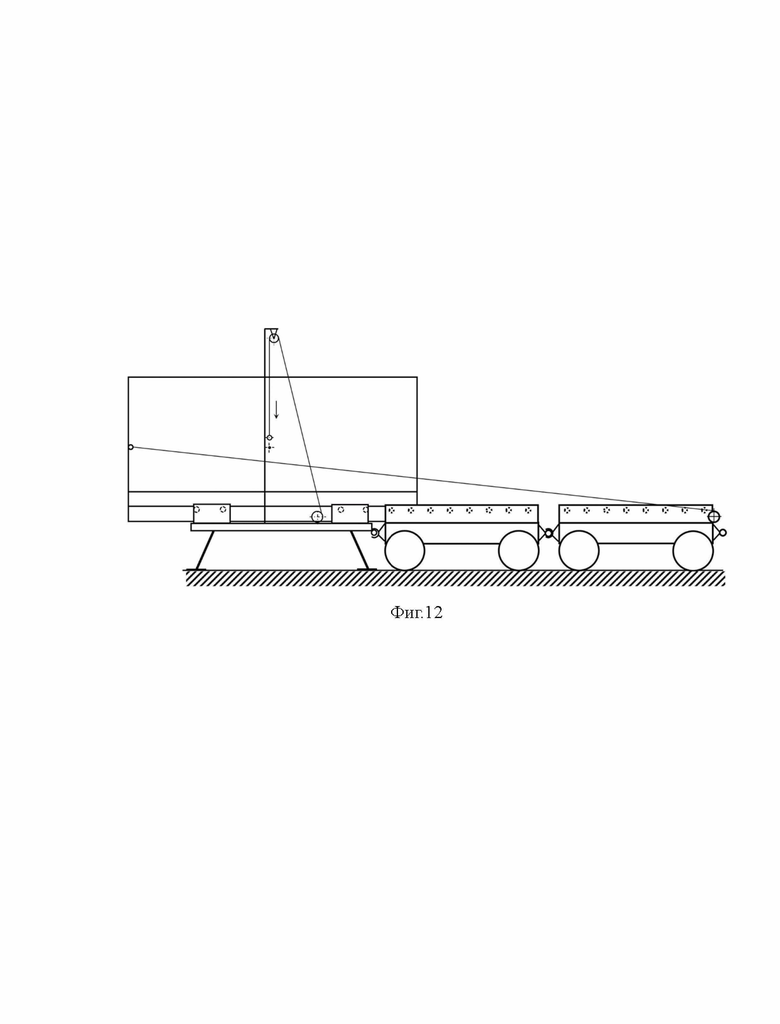
Фиг. 12, на которой изображена схема установки ПГ на направляющие ролики посадочной платформы КА.
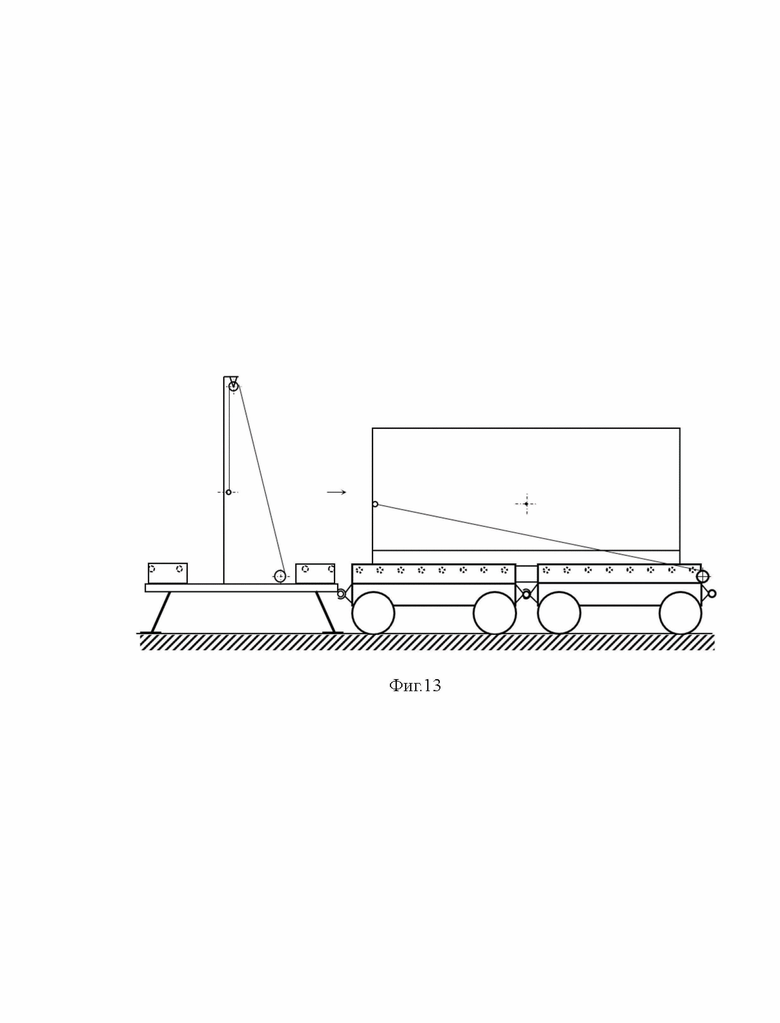
Фиг. 13, на которой изображена схема погрузки ПГ на направляющие ролики грузовой платформы ТС.
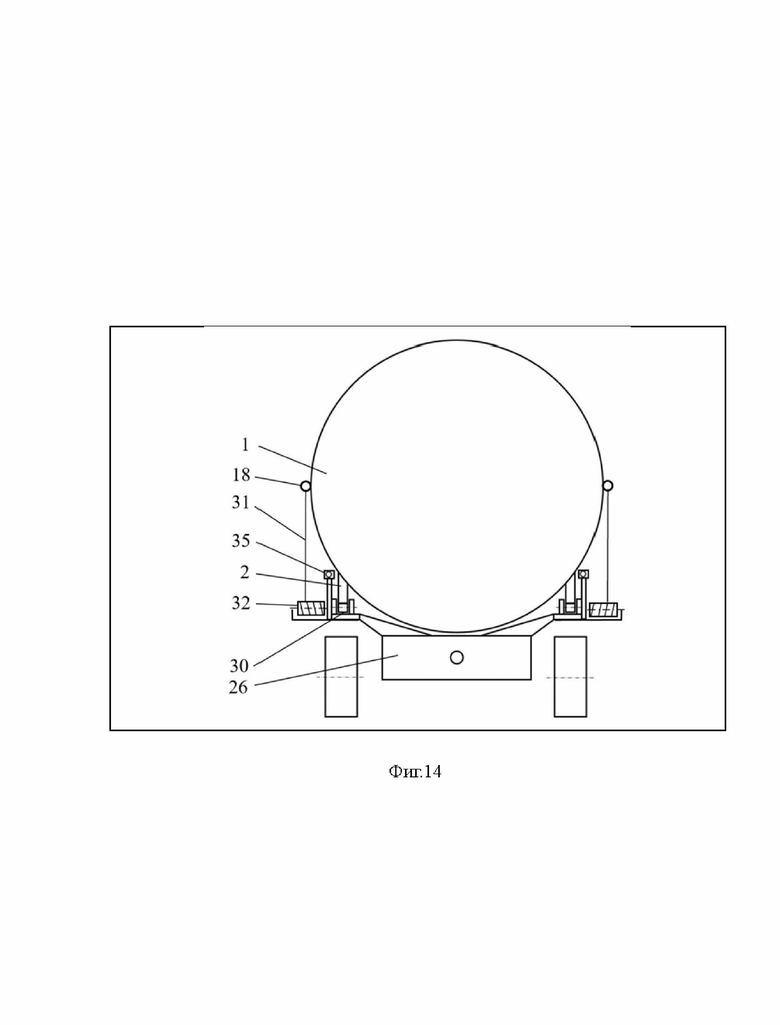
Фиг. 14, на которой изображена схема транспортного средства с погруженным ПГ, где: 35 - бортовые видеокамеры.
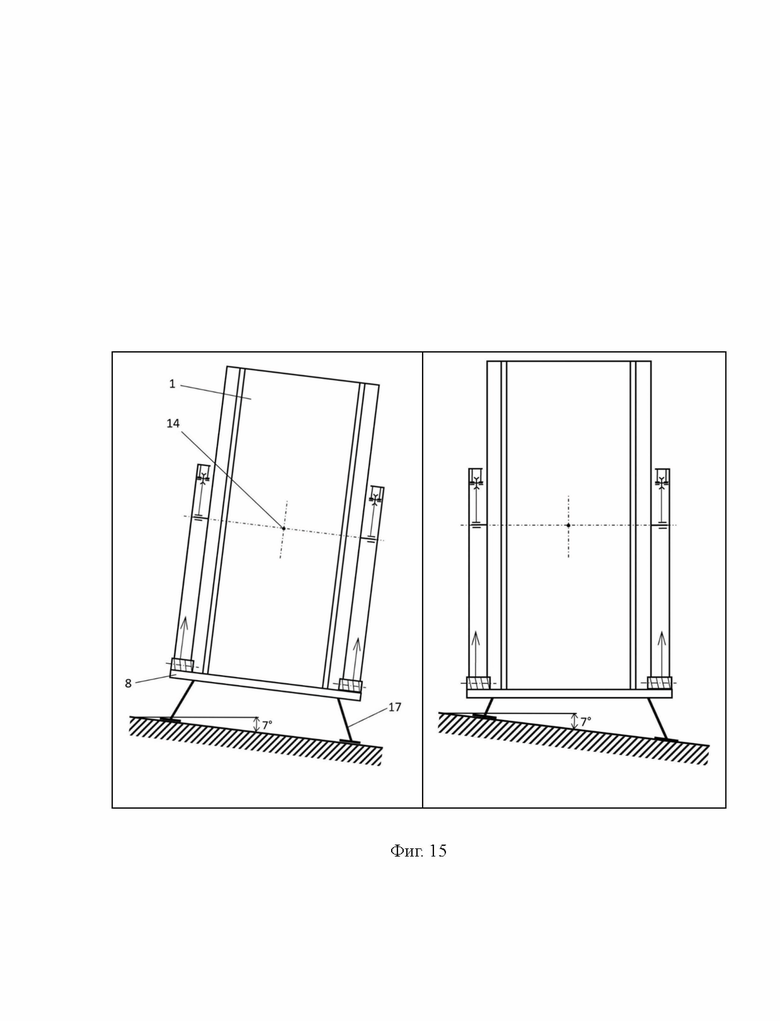
Фиг. 15, на которой изображена схема выравнивания посадочной платформы КА путем регулирования длины опор.
Осуществление изобретения
В соответствии с фиг. 8-15, для разгрузки ПГ 1, находящегося на посадочной платформе КА 8, имеется специальное такелажное оборудование, которое включает в себя лебедки 7 и 9, от которых тросы 6 и 10 идут через блоки 3 и 13, установленные на вертикальных стойках 5 и 11, соответственно к шарнирным подвесам 4 и 12.
Шарнирные подвесы установлены на вращающихся цапфах 21, которые крепятся пиротехническими болтами 24 к боковой поверхности ПГ по обеим сторонам, а направляющие 19 и 20, выполненные в виде тележек 22, находящихся внутри прямоугольного профиля стоек 5 и 11, обеспечивают исключительно вертикальное перемещение шарнирных подвесов при подьеме-опускании и кантовании ПГ, для чего в прямоугольном профиле имеется продольный паз 23.
Оси шарнирных подвесов 4 и 12 смещены относительно центра масс 14 ПГ на плечо «l», поэтому при подъеме ПГ при помощи лебедок 7 и 9 под действием силы тяжести одновременно происходит его поворот на 90° по часовой стрелке, в результате чего ПГ занимает горизонтальное положение, а расположение направляющих салазок 2, закрепленных в нижней части ПГ, позволяет с помощью лебедок 7 и 9 установить ПГ этими направляющими салазками на ролики 15.
При кантовании ПГ используется также такелажное оборудование ТС: две страховочные лебедки 32, установленные на транспортном средстве по обоим бортам, которые с помощью тросов 31 соединены с такелажными точками 18, расположенными по обеим сторонам основания ПГ. Соединение тросов 31 страховочных лебедок 32 с такелажными точками 18 - это единственная подготовительная операция, которая перед началом разгрузки ПГ выполняется космонавтом-оператором вручную до разъединения основания ПГ с посадочной платформой и начала разгрузки.
Разгрузка начинается после выполнения команды на срабатывание пиротехнических болтов 16. Эта команда может быть подана с безопасного расстояния космонавтом после подтверждения автоматики о готовности к разгрузке. При выполнении команды разрываются все места креплений основания ПГ к посадочной платформе. ПГ продолжает стоять на посадочной платформе КА только под действием гравитационного поля Луны.
Все остальные операции разгрузки выполняются автоматически, космонавт-оператор только визуально прослеживает процесс и может приостановить его вручную путем отключения питания всех лебедок, снабженных тормозами, исключающими произвольное разматывание тросов.
Силы натяжения тросов 31 уравновешивают поворотный момент от силы тяжести ПГ после отрыва его основания от посадочной платформы, а при работе лебедок на разматывание тросов обеспечивают плавный поворот ПГ за счет их постоянного натяжения. Лебедки подъема-опускания 7 и 9, и страховочные лебедки 32 работают синхронно, обеспечивая плавное выполнение операции кантования ПГ.
Транспортное средство состоит из двух четырехколесных грузовых платформ 25, 26 с активной подвеской, например, конструкция которой описана в патенте [18], обеспечивающей выравнивание грузовых платформ относительно посадочной платформы, что позволяет укладывать ПГ в горизонтальном положении одновременно и на посадочную, и на грузовую платформу.
Чтобы повысить надежность и безопасность выполнения дальнейших операций после выравнивания грузовых платформ ТС, состыкованных с помощью стыковочного устройства 28, ТС стыкуется с посадочной платформой КА с помощью стыковочного устройства 27. После этого ролики 15 посадочной платформы КА и ролики 29, 30 грузовой платформы ТС образуют единую роликовую дорожку. Для дистанционного контроля процесса погрузки ПГ на ТС установлены бортовые видеокамеры 35.
При кантовании ПГ производится его подъем с помощью лебедок 7 и 9, при этом страховочные лебедки 32 работают на разматывание тросов 31, обеспечивая постоянное их натяжение так, чтобы одновременно с подъемом ПГ происходил его плавный поворот под действием собственной силы тяжести в гравитационном поле Луны. После разворота ПГ в горизонтальное положение выполняется его опускание с помощью лебедок 7 и 9 и установка направляющими салазками 2 на ролики 15 посадочной платформы КА, разделение ПГ и шарнирных подвесов 4 и 12 с помощью пиротехнических болтов 24 и его перегрузка с помощью лебедок 32 по роликам на грузовую платформу ТС.
При массе ПГ, например, 18 т все такелажные операции на Луне потребуют усилия на лебедках 7 и 9 посадочной платформы КА не более 15-20 кН. Применением полиспастовых схем требуемое усилие может быть уменьшено минимум вдвое.
Усилие натяжения тросов 31, связывающих страховочные лебедки 32 с такелажными точками ПГ, по предварительным оценкам, будет менее 1000 Н.
Таким образом, предложенные в заявке новый способ и новые технические решения, определяющие технологические процессы разгрузки габаритных ПГ большой массы, позволяют решить сложную техническую проблему, а именно исключить необходимость в финансировании, создании и летной отработки горизонтальной посадки межпланетных космических аппаратов на поверхность Луны и планет. Это существенно снижает стоимость доставки габаритных модулей лунной станции на Луну и уменьшает время, необходимое для начала реализации строительства этой станции.
Литература
1. Электронный ресурс: https://www.roscosmos.ru/22888/
2. Электронный ресурс: https://base.garant.ru/408720559/
3. Мержанов А.И. Лунная база «Барминград» // Воздушно-космическая сфера. 2018. №2. С. 107-117.
4. Схема долговременной лунной базы, разработанная под руководством В.П. Бармина. Электронный ресурс: https://habr.com/ru/companies/timeweb/articles/597825/.
5. Электронный ресурс: https://ru.wikipedia.org/wiki/%D0%9D%D0%B0%D1%83%D0%BA%D0%В0_(%D0%BC%D0%BE%D0%B4%D1%83%D0%BB%D1%8C%D0%9C%D0%9A%D0%A1)
6. Кемурджиан А.Л. Громов В.В., Черкасов И.П., Шварев В.В. Автоматические станции для изучения поверхностного покрова Луны. Москва, Машиностроение, 1976. С. 7-22.
7. Космонавтика. Энциклопедия. Гл. редактор В.П. Глушко. Москва, «Советская энциклопедия», 1985, с. 234-235.
8. Ракетно-космическая корпорация «Энергия» им. С.П. Королева. 1946-1996. Гл. ред. Ю.П. Семенов. 1996. С. 253.
9. Космонавтика. Энциклопедия. Гл. редактор В.П. Глушко. Москва, «Советская энциклопедия», 1985, с. 349.
10. Кемурджиан А.Л. Громов В.В., Черкасов И.И., Шварев В.В. Автоматические станции для изучения поверхностного покрова Луны. Москва, Машиностроение, 1976. С. 49-101.
11. Устройство и работа станции «Луна-17» и Лунохода-1». Передвижная лаборатория на Луне Луноход-1. Ред. А.П. Виноградов. Москва, Наука, том 1. 1971. С. 7-20.
12. Планетоходы. А.Л. Кемурджиан, В.В. Громов, И.Ф. Кажукало, М.И. Маленков и др. Ред. А.Л. Кемурджиан. Изд. 2-е, пеработанное и дополненное. Москва, Машиностроение. 1993. С. 332-349.
13. Гэтланд и др. Космическая Техника. Иллюстрированная энциклопедия. Москва, Мир. 1986. С. 115.
14. Электронный ресурс: https://newsru.cgtn.com/news/3d3d414e664e7a4d336b7a6333566d54/p.html
15. Электронный ресурс: https://m.wikipedia.org/wiki/%D0%A2%D1%8F%D0%BD%Dl%8C%D0%B2%D1%8D%D0%BD%D1%8С-1
16. Электронный ресурс: http://www.nasa.gov/mission_pages/msl/multimedia/gallery/pia14839.html
17. Электронный ресурс: https://en.wikipedia.org/wiki/Intemational_Lunar_Resources_Exploration_Concept.
18. Патент РФ №2671661 по заявке №2017122305 с приоритетом от 23.06.2017 «Колесно-шагающий движитель с функцией активной подвески».
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛУННЫЙ КОМПЛЕКС С МНОГОРАЗОВЫМИ ЭЛЕМЕНТАМИ, ТРАНСПОРТНАЯ СИСТЕМА ЗЕМЛЯ-ЛУНА-ЗЕМЛЯ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337040C2 |
| МНОГОРАЗОВЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ ДЛЯ ДОСТАВКИ ТУРИСТОВ С ЛУННОЙ ЗАПРАВОЧНОЙ СТАНЦИИ НА ТРАЕКТОРИЮ ОБЛЁТА МАРСА И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЭТУ СТАНЦИЮ | 2020 |
|
RU2741143C1 |
| Рычажное устройство | 2022 |
|
RU2798334C1 |
| СИСТЕМА ТЕРМОРЕГУЛИРОВАНИЯ ПРИБОРНОГО ОТСЕКА ПОСАДОЧНОГО ЛУННОГО МОДУЛЯ | 2011 |
|
RU2487063C2 |
| Унифицированная лунная посадочная платформа (УЛПП) с инерционными лифтовыми платформами одновременного опускания для доставки грузов на лунную поверхность | 2021 |
|
RU2779426C1 |
| Колесо с квазигазовым наполнителем для лунного и планетного транспорта и способ его сборки | 2018 |
|
RU2679522C1 |
| ЗЕМЛЕ-ЛУННЫЙ КОМПЛЕКС (ЗЛК) | 2007 |
|
RU2344973C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| КОСМИЧЕСКИЙ ПОСАДОЧНЫЙ АППАРАТ | 2014 |
|
RU2584552C1 |




Группа изобретений относится к области космической техники, а именно к разгрузке полезных грузов (ПГ) с посадочной платформы лунного космического аппарата (КА) на борт лунного транспортного средства (ТС). Для этого производят кантование ПГ из вертикального в горизонтальное положение, опускание на посадочную платформу, перемещение ПГ с посадочной платформы КА на грузовую платформу ТС, которое производится с помощью собственных механизмов, размещенных на ТС. Устройство для разгрузки ПГ содержит лунный аппарат с посадочной платформой, опорами, грузовую платформу ТС, разгрузочное оборудование, содержащее салазки, стойки с тросовыми блоками, шарнирные подвесы с цапфами, тросовые лебедки, ролики. Достигается надежная и безопасная разгрузка полезных грузов на поверхности Луны. 2 н. и 3 з.п. ф-лы, 15 ил.
1. Способ разгрузки габаритных полезных грузов (ПГ), например модулей лунных станций, с посадочной платформы лунного космического аппарата (КА) на борт лунного транспортного средства (ТС), включающий операции кантования этого ПГ из вертикального в горизонтальное положение и его последующего опускания в горизонтальном положении на посадочную платформу под действием гравитационного поля Луны с помощью собственного разгрузочного оборудования, закрепленного на этой же посадочной платформе, и операцию линейного перемещения ПГ с посадочной платформы КА на грузовую платформу ТС, которая производится с помощью собственных механизмов, размещенных на ТС, после выравнивания горизонтального положения грузовой платформы ТС относительно посадочной платформы КА.
2. Устройство разгрузки габаритных полезных грузов, например модулей лунных станций, включающее: лунный космический аппарат с посадочной платформой, снабженной опорами, и закрепленным на этой платформе ПГ, грузовую платформу лунного транспортного средства, ориентированного относительно посадочной платформы таким образом, чтобы продольная ось грузовой платформы была соосна оси ПГ в тот момент, когда он занимает горизонтальное положение на посадочной платформе, разгрузочное оборудование КА и ТС, состоящее из: двух направляющих салазок, закрепленных на боковой поверхности ПГ вдоль его продольной оси, симметрично относительно осевого сечения, проходящего через его центр масс; двух вертикальных стоек с установленными в их верхней части тросовыми блоками, закрепленных на посадочной платформе; двух шарнирных подвесов ПГ, оси которых вместе с зафиксированными на этих осях от продольных перемещений свободно вращающимися цапфами закреплены на его боковых поверхностях симметрично относительно осевого сечения, на одном уровне с его центром масс, но со смещением «l» в плоскости осевого сечения, в направлении, перпендикулярном оси ПГ; двух тросовых лебедок, тросы которых связывают их через упомянутые тросовые блоки с соответствующими шарнирными подвесами ПГ; свободно вращающихся относительно горизонтальных осей роликов, установленных на обеих сторонах посадочной платформы КА таким образом, что после кантования и опускания ПГ он встает на эти ролики своими направляющими алазками; двух страховочно–движительных лебедок, размещенных на корме, на обоих бортах грузовой платформы ТС, концы тросов которых закреплены в такелажных точках ПГ.
3. Устройство разгрузки по п. 2, отличающееся тем, что на посадочной платформе КА и на грузовой платформе ТС установлены взаимодействующие части стыковочно–сцепного устройства, обеспечивающие возможность автоматической стыковки грузовой и посадочной платформ таким образом, чтобы образовать единую роликовую дорожку для перемещения ПГ.
4. Устройство разгрузки по п. 2, отличающееся тем, что ТС, кроме тягового и рулевого приводов каждого колеса, снабжено приводами активной подвески, обеспечивающими возможность достижения в процессе маневрирования и регулирования клиренса соосного пространственного положения осей двух частей стыковочного устройства, необходимого для правильной стыковки посадочной платформы КА с грузовой платформой ТС.
5. Устройство разгрузки по п. 2, отличающееся тем, что опоры посадочной КА снабжены устройствами и аппаратурой автоматического регулирования длины каждой опоры таким образом, чтобы получить максимально возможное выравнивание положения посадочной платформы лунного КА относительно горизонтального уровня.
| 0 |
|
SU176098A1 | |
| 0 |
|
SU159761A1 | |
| ТАРЕЛЬЧАТЫЙ КОЛОННЫЙ АНПАРАТ | 0 |
|
SU179277A1 |
| US 10443976 B2, 15.10.2019 | |||
| ТАКЕЛАЖНОЕ УСТРОЙСТВО ДЛЯ КАНТОВАНИЯ ТРАНСФОРМАТОРОВ | 2014 |
|
RU2570188C1 |
| CN 105599922 B, 09.01.2018. | |||

