G01N1/02 - Исследование или анализ материалов путем определения их химических или физических свойств (разделение материалов вообще B01D, B01J, ВОЗ, В07; аппараты, полностью охватываемые каким-либо подклассом, см. в соответствующем подклассе, например B01L; измерение или испытание с помощью ферментов или микроорганизмов С12М, C12Q; исследование грунта основания на стройплощадке E02D 1/00; мониторинговые или диагностические устройства для оборудования для обработки выхлопных газов F01N 11/00; определение изменений влажности при компенсационных измерениях других переменных величин или для коррекции показаний приборов при изменении влажности, см. G01D или соответствующий подкласс, относящийся к измеряемой величине;
Е21В 3/03 - вращательное бурение - с прерывистым вращением инструмента в одном направлении;
Е21В 49/02 - взятие проб грунта механическими средствами (устройства для получения ненарушенных кернов Е21В 25/00; исследование грунта основания на стройплощадке E02D 1/00);
E02D 1/04 - Основания и фундаменты; котлованы; насыпи (для гидротехнических сооружений Е02В); подземные и подводные сооружения.
1. Область техники, к которой относится изобретение
Изобретение относится к области экологического мониторинга, а конкретно - к способу отбора проб легких и тяжелых грунтов или снега.
2. Уровень техники
Известен способ отбора проб грунта и устройство для его осуществления [1], при котором грунтонос погружают задавливанием на поверхность грунта до глубины пробоотбора, затем - извлекают. При погружении грунтоноса в грунт последний проходит через внутреннюю полость грунтоноса и открытые крышки. При извлечении грунтоноса крышки под действием грунта закрываются.
Недостатком данного способа в ходе реализации при помощи беспилотного летательного аппарата (БЛА) коптерного типа является необходимость создания большого усилия для погружения грунтоноса в грунт, которое не позволяет обеспечить данный тип БЛА, а также высокая вероятность в ходе транспортирования отобранной порции снега его самопроизвольного удаления из полости грунтоноса. Кроме того, необходимость в надавливании на грунт при извлечении крышек является препятствием для взлета данного типа БЛА.
Известен способ отбора проб жидкости, реализуемый при использовании дистанционно-управляемого БЛА [2], при котором, полностью подготовленный БЛА вертикального взлета-посадки (ВВП) запускается по командам с наземного пункта управления. Управление БЛА ВВП осуществляется по программе, заложенной в бортовую ЭВМ перед стартом. В случае необходимости вмешательства в программу полета управление может осуществляться дистанционно с наземного пункта управления. После взлета БЛА ВВП совершает полет в район выполнения задания, при достижении которого на заданной высоте переходит в режим зависания. По команде с наземного пункта управления лебедка начинает разматывать трос. Жидкость затекает в пробоотборник с поверхности или с заданной глубины, а также совместно с донными отложениями в зависимости от глубины погружения пробоотборника. Далее по команде с наземного пункта управления лебедка сматывает трос, поднимая пробоотборник с пробой жидкости к БЛА.
Данный способ не предназначен для отбора проб грунта и снега. Поэтому отобрать пробу грунта или снега из необходимой зоны пробоотбора при комплектации БЛА тросом (плюс-минус 1 м) да еще при наличии ветра затруднительно. Кроме того, в случае отбора грунта или снега наличие троса - это всегда опасность его зацепа за деревья, высокий кустарник, здания, сооружения.
Наиболее близким по принципу действия и технической сущности является способ дистанционного отбора проб почвы (грунта) с применением БЛА [3], заключающийся в дистанционном отборе проб почвы (грунта), включающего в себя БЛА коптерного типа, пробоотборник, систему сброса и возвращения последнего в исходную позицию. Данный способ реализует с целью исключения нахождения оператора на зараженной местности, а также возможностью отбора и доставки проб из труднодоступных мест, отбор проб почвы (грунта) в автоматическом режиме путем выдвижения БЛА в район пробоотбора, сброса пробоотборника со скоростью свободного падения с заранее запрограммированной высоты, подъем пробоотборника с отобранной пробой в исходную позицию на БЛА с помощью троса и электродвигателя и возвращения на наземный пункт управления.
Данный способ в связи с наличием троса имеет вышеизложенные недостатки, такие как: низкая точность попадания пробоотборника в зону отбора пробы, опасность зацепа за деревья, кустарники, здания и сооружения.
3. Раскрытие сущности изобретения
При авариях на радиационно, химически и биологически опасных объектах может образоваться опасное заражение (загрязнение) значительных по площади районов в пределах которых невозможно нахождение людей. Многие районы могут быть труднодоступными из-за рельефа местности или наличия естественных и водных препятствий. В таких случаях для оперативного отбора проб зараженного грунта (снега) большое значение имеет применение БЛА, среди которых наиболее распространенными являются БЛА коптерного типа.
Целью изобретения является создание условий по реализации дистанционного отбора проб грунта, снега с помощью БЛА коптерного типа из труднодоступных заранее установленных (плюс-минус 1 м) участков зараженной местности.
Техническая задача заявляемого изобретения - создание полезной нагрузки, включающей жесткое (в отличие от троса) крепление к БЛА специальной конструкции пробоотборника.
Поставленная задача достигается тем, что на БЛА коптерного типа устанавливают штангу, к которой жестко крепится пробоотборник, представляющий собой бур со стаканом, оснащенный приводом вращения.
При использовании БЛА коптерного типа отбор пробы может осуществляться вращением БЛА вокруг своей оси или вращением встроенного в пробоотборник привода. При этом грунт (снег) в ходе вращения бура поднимается по направляющим штанги и попадает внутрь стакана. При появления грунта (снега) в специальных отверстиях в верхней части стакана вращение прекращается.
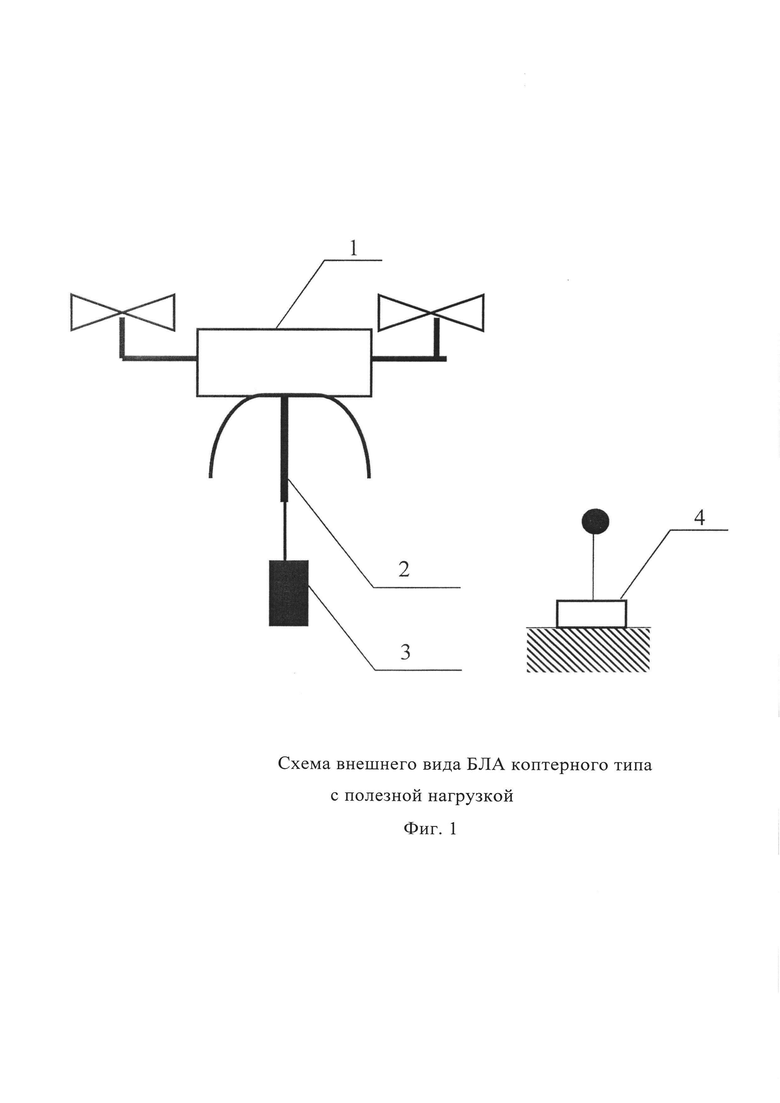
Сущность предлагаемого способа поясняется схемами (см. фиг. 1-4), где использованы следующие обозначения:
1 - БЛА коптерного типа;
2 - штанга;
3 - бур со стаканом;
4 - наземный пункт управления.
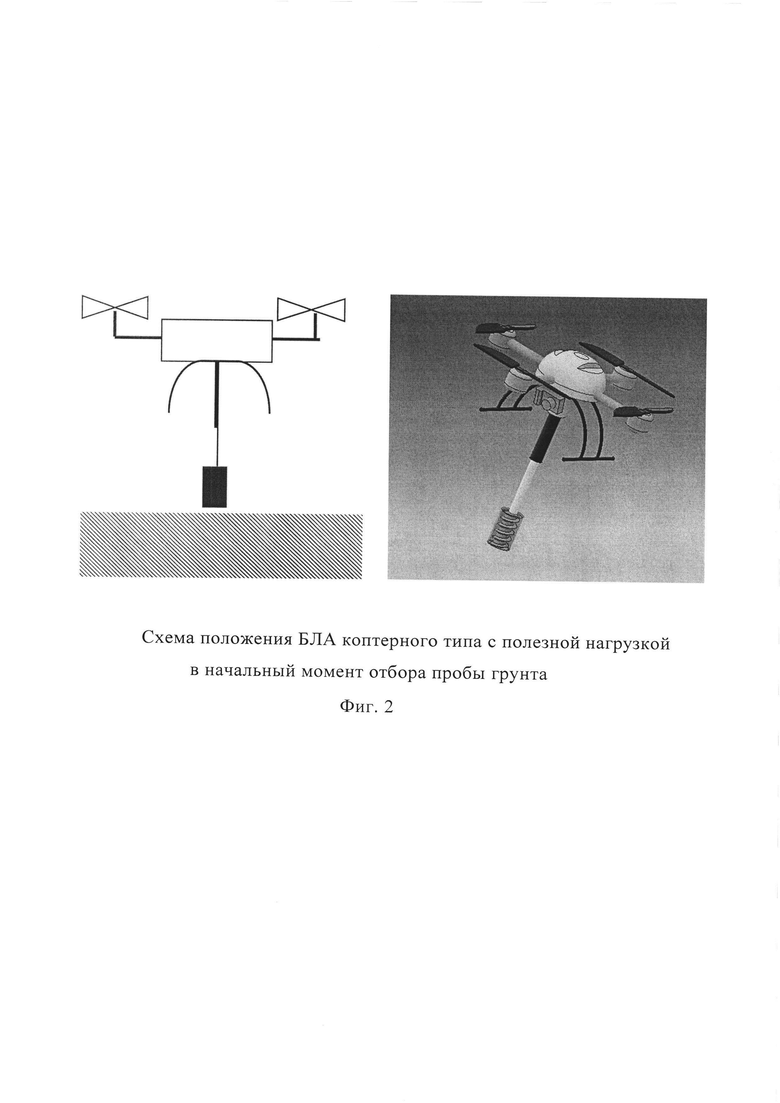
На фиг.2 изображено положение БЛА с полезной нагрузкой в начальный момент отбора пробы грунта.
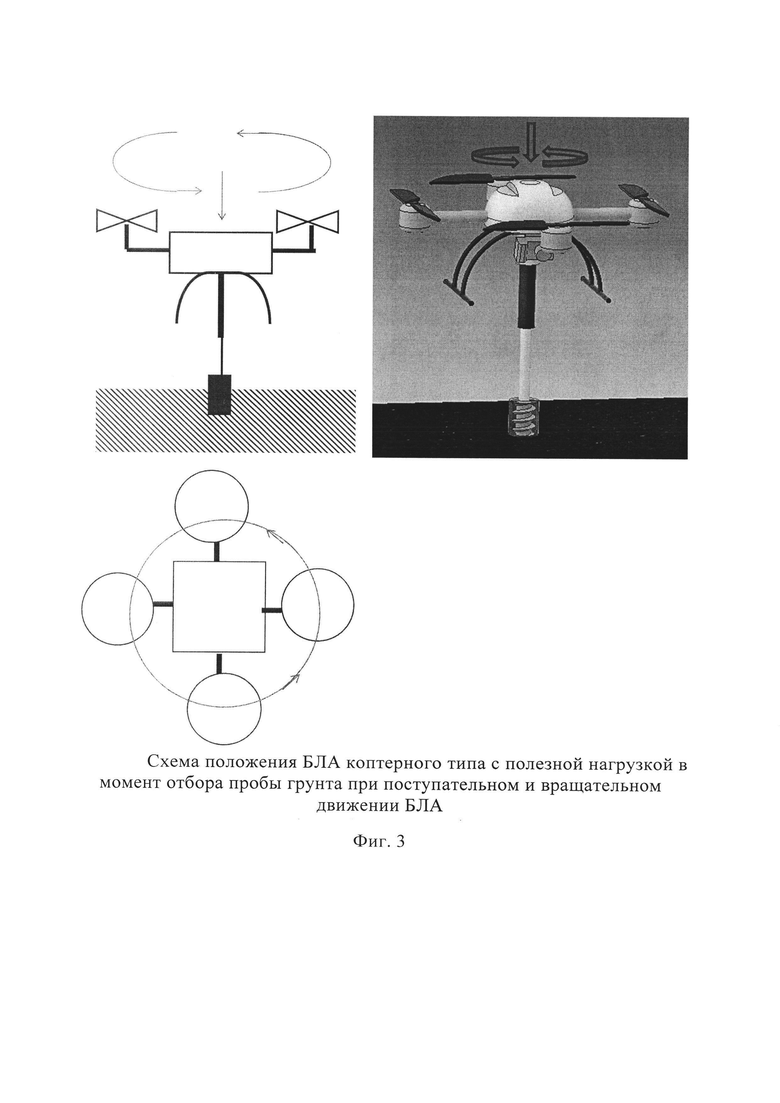
На фиг. 3 изображено положение БЛА коптерного типа с полезной нагрузкой в момент отбора пробы грунта (снега) (вид сбоку и сверху), где стрелками показаны поступательное и вращательное движения БЛА.
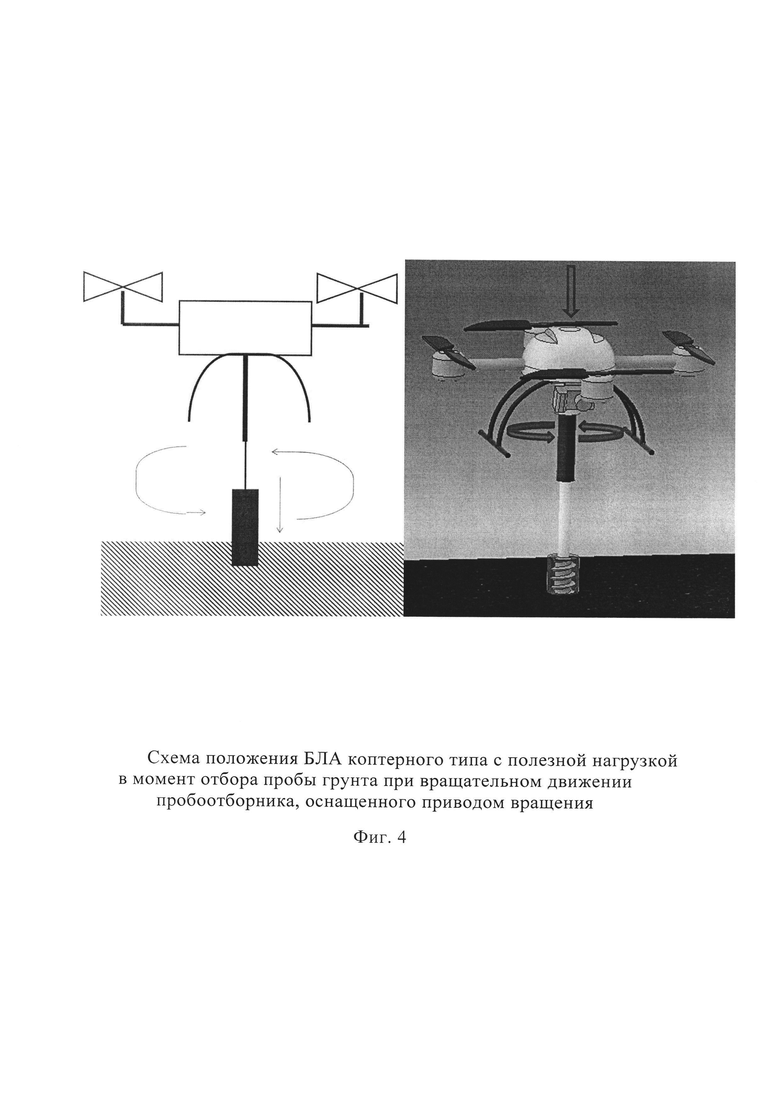
На фиг. 4 изображено положение БЛА коптерного типа с полезной нагрузкой в момент отбора пробы грунта (снега), где стрелками показаны поступательное и вращательное движения пробоотборника, оснащенного приводом вращения.
4. Осуществление изобретения
Пример использования предлагаемого способа.
Перед отбором проб или в процессе выполнения полетного задания проводится визуальная разведка местности. В процессе визуальной разведки местности определяются точки (плюс-минус 1 м), в которых необходимо отобрать пробу грунта или снега.
На земле перед стартом производят подготовку БЛА коптерного типа к работе, присоединяют штангу и бур со стаканом к БЛА, устанавливают полетное задание с координатами точек отбора проб.
Подготовленный к работе БЛА коптерного типа с полезной нагрузкой запускается по командам с наземного пункта управления (поз. 4 фиг. 1). Выполняя программу полетного задания в автоматическом режиме или в режиме ручного управления, БЛА коптерного типа подлетает к точке пробоотбора. Далее БЛА снижается до высоты, соответствующей длине штанги с буром, т.е. до момента соприкосновения бура с грунтом (снегом), после чего беспилотник по команде осуществляет вращение вокруг своей оси, либо с наземной станции управления подается команда на пуск привода вращения бура. В результате всех описанных действий режущая кромка бура врезается в грунт (снег), при поступательном движении вниз заглубляется, а грунт по лопастям бура перемещается наверх в полости пробоотборника. В случае если в точке пробоотбора имеется большое количество камней или жесткость грунта не позволяет отобрать пробу данной конструкцией пробоотборника (с помощью видеокамеры наблюдается ее наличие или отсутствие в стакане), оператор дает команду БЛА на взлет и повторение ранее описанных операций вблизи (плюс-минус 1 м) от ранее установленной точки.
После этого по команде с наземного пункта управления коптер набирает высоту и перемещается к наземной станции управления или к лаборатории, в которую необходимо доставить пробу.
Весь процесс отбора пробы может осуществляться как в автоматическом, так и в ручном режиме.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1 Патент на полезную модель РФ №1534366 А1 - МПК G01N 1/04, 07.01.1990 г.
2 Патент на полезную модель РФ №71628 - МПК В64С, 23.07.2007 г.
3 Заявка на патент РФ №2018119227 «Способ дистанционного отбора проб почвы (грунта) с применением беспилотного летательного аппарата» МПК В64С 39/00 от 24.05.2018 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА РАДИАЦИОННОЙ, ХИМИЧЕСКОЙ И БИОЛОГИЧЕСКОЙ ОБСТАНОВКИ МЕСТНОСТИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЁТНОГО ТИПА | 2024 |
|
RU2838079C1 |
| ПРОБООТБОРНИК ГРУНТА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЁТНОГО ТИПА | 2022 |
|
RU2790164C1 |
| Способ определения дисперсного состава альфа-активных примесей при аварийном выбросе в атмосферу | 2021 |
|
RU2777752C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| Устройство для отбора проб илистых отложений | 2024 |
|
RU2838869C1 |
| Устройство для отбора проб илистых отложений | 2024 |
|
RU2838870C1 |
| СПОСОБ И УСТРОЙСТВО ОТБОРА ПРОБ ВОЗДУХА ДЛЯ ПОСЛЕДУЮЩЕГО АНАЛИЗА ГАЗООБРАЗНЫХ ИЛИ АЭРОЗОЛЬНЫХ ПРИМЕСЕЙ | 2004 |
|
RU2298776C2 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| СПОСОБ ОТБОРА ПРОБ ВОДЫ С ПОВЕРХНОСТИ ВОДОЁМА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2825644C1 |
Изобретение относится к области экологического мониторинга, а конкретно к способу отбора проб легких и тяжелых грунтов или снега. На беспилотный летательный аппарат коптерного типа (БЛА КТ) устанавливают штангу, к которой жестко крепится пробоотборник, представляющий собой бур со стаканом, оснащенный приводом вращения. Отбор проб грунта, снега осуществляется в автоматическом режиме путем выдвижения БЛА КТ в район пробоотбора, снижения БЛА КТ до момента соприкосновения с грунтом, вращения вокруг своей оси или пуска привода вращения бура пробоотборника, подъема БЛА КТ с отобранной пробой в исходную позицию и возвращения на наземный пункт управления. Создается полезная нагрузка, включающая жесткое крепление к БЛА конструкции пробоотборника. 4 ил.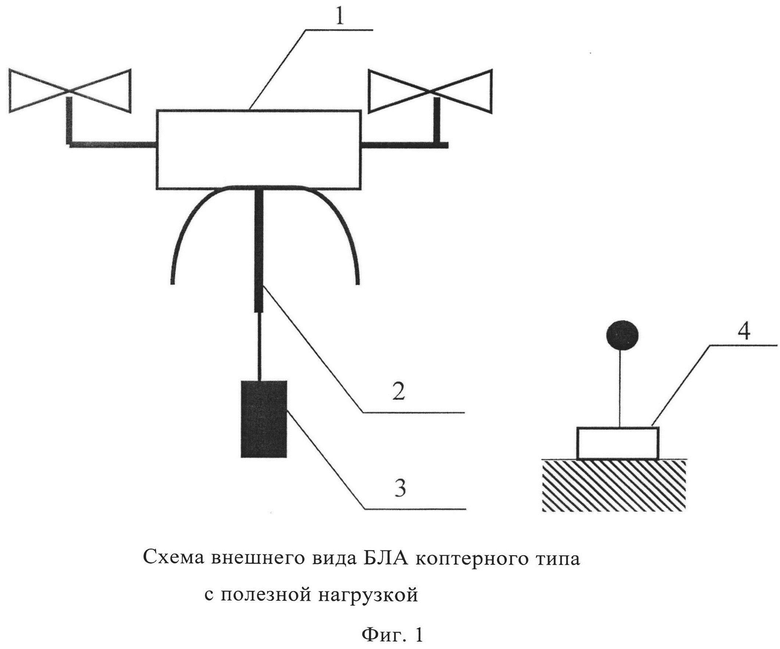
Способ дистанционного отбора проб грунта, снега с использованием беспилотного летательного аппарата коптерного типа (БЛА КТ), заключающийся в дистанционном отборе проб почвы грунта, снега, включающий в себя БЛА КТ, штангу, пробоотборник, состоящий из бура, помещенного в стакан, при необходимости оснащенный приводом вращения бура, отличающийся тем, что с целью исключения нахождения оператора на зараженной местности при отборе проб, а также возможностью отбора и доставки проб из труднодоступных мест, отбор проб грунта, снега осуществляется в автоматическом режиме путем выдвижения БЛА КТ в район пробоотбора, снижения БЛА КТ до момента соприкосновения с грунтом, вращения вокруг своей оси или пуска привода вращения бура пробоотборника, подъема БЛА КТ с отобранной пробой в исходную позицию и возвращения на наземный пункт управления.
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА УЛОВА РЫБЫ НА СУДНО КОРМОВОГО ТРАЛЕНИЯ | 0 |
|
SU162381A1 |
| СПОСОБ ОТБОРА РАСТИТЕЛЬНЫХ ПРОБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2651175C2 |
| Ручной пробоотборник почвы | 2019 |
|
RU2714348C1 |
| WO 2017205874 A1, 30.11.2017 | |||
| CN 108700895 A, 23.10.2018. | |||

