Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах.
Актуальность задачи связана с повышением безопасности при выполнении работ в условиях, представляющих опасность для жизни и здоровья человека.
Известен дистанционно управляемый робот радиационной разведки (патент RU 82871 U1 опубл. 10.05.2009) содержащий опорную раму, на которой жестко закреплен антропоморфный шарнирный манипулятор с механическим захватом, на котором установлен коллимированный детектор с двумя каналами. Многоэлементный детектор установлен с возможностью вращения на опорной раме. Рама связана с транспортным средством -многоколесным шасси, со встроенным в каждое колесо мотор-редуктором. Передние колеса закреплены на продольной оси рычага шасси, а задние колеса каждого борта закреплены на двух рычагах шасси, в корме шасси установлена аккумуляторная батарея. Манипулятор робота выполнен в виде шести последовательно соединенных шарниров. На опорной раме расположены радиомодем и телевизионный передатчик. Робот оснащен системой видео контроля, а одна из телекамер установлена с возможностью вращения. Приборный контейнер жестко закреплен на опорной раме. Пульт оператора содержит соединенные между собой кабелями модуль управления, блок питания, аккумуляторную батарею, микроЭВМ, видеомонитор, радиомодем и телевизионный приемник. На переднем рычаге шасси может быть закреплен контейнер для отбора проб.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование состава и структуры комплекса в соответствии с конкретной оперативно-тактической задачей, что является его недостатком.
В качестве прототипа выбран мобильный робототехнический комплекс (патент RU 2364500 С2, опубл. 20.08.2009), включающий мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. На транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, кроме того, мобильный робот дополнительно снабжен выносной системой видеонаблюдения и дополнительно включает устройство ее доставки в заданную точку местности и ее оперативного развертывания. Комплект дополнительного оборудования содержит раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, - на другом конце. Известный мобильный робототехнический комплекс предназначен для дистанционной работы в труднодоступных и опасных для присутствия человека местах и выполнения следующих оперативно-тактических действий: разведка территории, наблюдение за потенциально опасными объектами, обезвреживание этих объектов путем эвакуации или дезактивации, а также решение других подобных задач.
К недостаткам прототипа можно отнести отсутствие дозиметрического оборудования и газоанализатора для выполнения радиационной и химической разведки, невозможность выполнения технологических операций дополнительным оборудованием в автоматическом режиме, наличие дополнительной выносной системы видеонаблюдения, что усложняет процесс эксплуатации, ограничивает возможность транспортирования дополнительного оборудования к месту выполнения операций и может создавать электро-магнитные помехи для передачи основного телевизионного сигнала или вовсе его прерывать при определенных взаимных положениях мобильного робота, системы телевизионного наблюдения и пульта оператора.
Технической задачей настоящего изобретения является разработка средства транспортного роботизированного (далее СТР) для проведения разведки в условиях повышенного радиационного фона, а также в условиях химических загрязнений, представляющих опасность для человека, поиска источников ионизирующего излучения и обозначения опасных участков местности в автоматическом режиме.
Поставленная задача выполнения радиационной и химической разведки решается применением комплекта сменного дозиметрического оборудования и сменного модуля газоанализатора, сменного модуля обозначения опасных участков местности, сменного комплекта инструмента в составе дрели и кусачек, сменного комплекта модулей для отбора проб грунта, воды и воздуха, а также переносного ретранслирующего устройства для увеличения дальности действия связи посредством радиоканала.
Поставленная задача по автоматизации СТР выполняется применением радиационно-стойких датчиков углов поворота в шарнирах манипулятора и редукторов высокой точности. При этом обеспечивается повторяемость положений рабочего органа манипулятора в пределах 1 мм. Для управления манипулятором применяется трехуровневая система управления, выполненная на радиационно-стойких комплектующих и размещенная в корпусах, защищающих от контакта с химически активными средами и осадками. При этом первый уровень управления размещается в составе манипулятора и обеспечивает управление непосредственно каждым шарниром по отдельности, второй уровень управления выдает задания каждому шарниру и контролирует их исполнение в «режиме реального времени», третий уровень осуществляет планирование траекторий рабочего органа манипулятора на основе полученных заданий или сохраненных траекторий для работы с конкретным оборудованием, размещаемым на СТР, и передает их на второй уровень по готовности. Такая схема управления манипулятором обеспечивает синхронность движения всех шарниров, высокую точность перемещений и возможность расчета и осуществления сложных траекторных режимов управления.
Для осуществления автоматизированных операций по отбору проб грунта на основе манипулятора и видеокамеры, установленной на нем, а также центрального бортового вычислителя достаточной мощности реализована система технического зрения. Система технического зрения обеспечивает построение 3D карты области в непосредственной близости от СТР, в которой планируется отбор грунта, что позволяет выполнить автоматический отбор проб грунта в указанной оператором точке. Применение автоматизированных функций позволяет существенно снизить нагрузку на оператора и отказаться от применения дополнительных средств видеонаблюдения. Для управления всеми полезными нагрузками СТР оборудовано цифровой шиной передачи и обработки данных с повышенной радиационной стойкостью и обеспечивает централизованное управление всеми полезными нагрузками через общий цифровой радиоканал с кодированием информации. Для обеспечения достаточной автономности СТР комплектуется сменными аккумуляторами, обеспечивающими непрерывную работоспособность в течение четырех часов, при этом габариты СТР позволяют ему проходить в дверные проемы, а шасси обеспечивает его перемещение не только по различному рельефу, но и перемещение по лестничным маршам, что позволяет выполнять разведку, в том числе, внутри зданий.
Таким образом, совокупность существенных признаков, не присущих прототипу и необходимых и достаточных для решения задачи проведения разведки в условиях радиационного или химического заражения, включает наличие возможности установки дозиметрического оборудования, модуля газоанализатора, модуля обозначения опасных участков местности, сменного комплекта инструмента в виде дрели и кусачек, комплекта модулей для отбора проб грунта, переносного ретранслирующего устройства для увеличения дальности действия связи посредством радиоканала, реализации автоматизированных операций, которые существенно снижают требования к системам дополнительного видео обзора и позволяют исключить использование выносной системы видеонаблюдения.
Техническим результатом является возможность проведения автоматизированной разведки в условиях радиационного или химического заражения без угрозы для жизни и здоровья людей, в том числе, внутри зданий и сооружений, оборудованных дверными проемами и лестничными маршами.
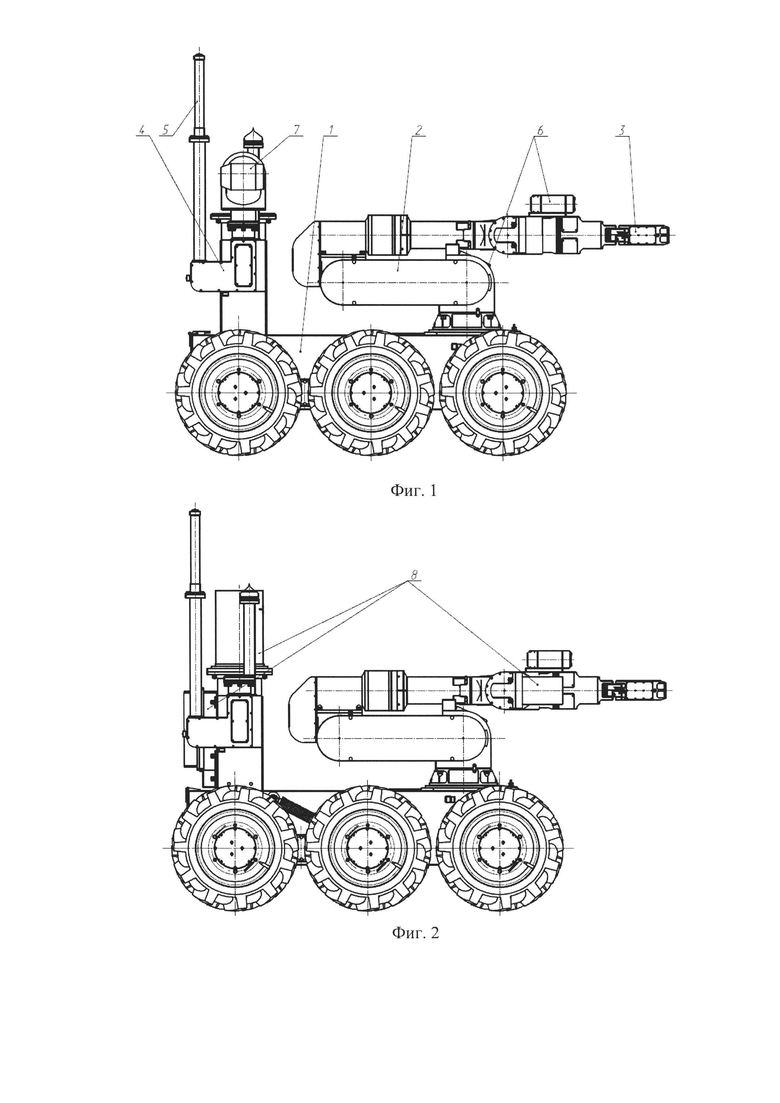
СТР изображено на фиг.1 и содержит шасси (1), манипулятор (2) с захватным устройством (3), блок управления (4), систему передачи данных (5), интегрированную в блок управления (4). Система передачи данных (4) посредством радиосвязи передает данные на пост управления выносной. Бортовая телевизионная система, состоит из отдельных видеоблоков (6) и (7) с источником подсветки, которые расположены на звеньях многостепенного манипулятора и на корпусе транспортного средства на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях.
СТР с установленным на него дозиметрическим оборудованием (8) показано на фиг.2.
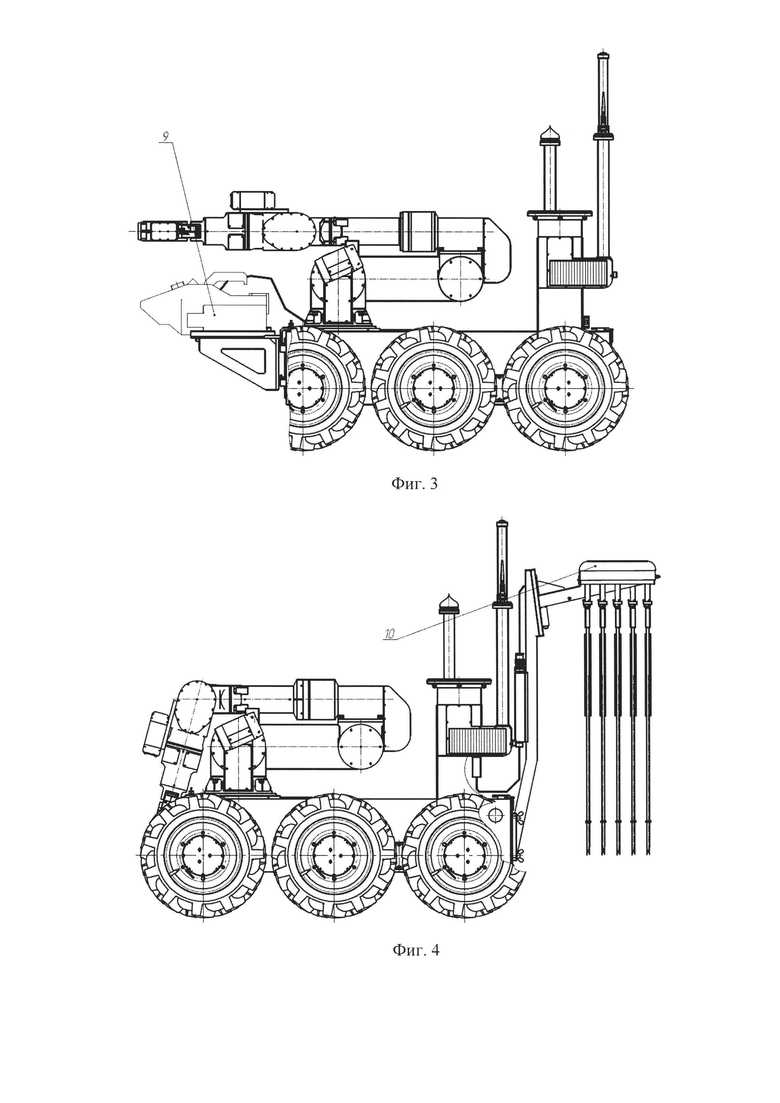
СТР с установленным на него газоанализатором (9) показано на фиг.3.
СТР с установленным на него модулем обозначения опасных участков местности (10) показано на фиг.4.
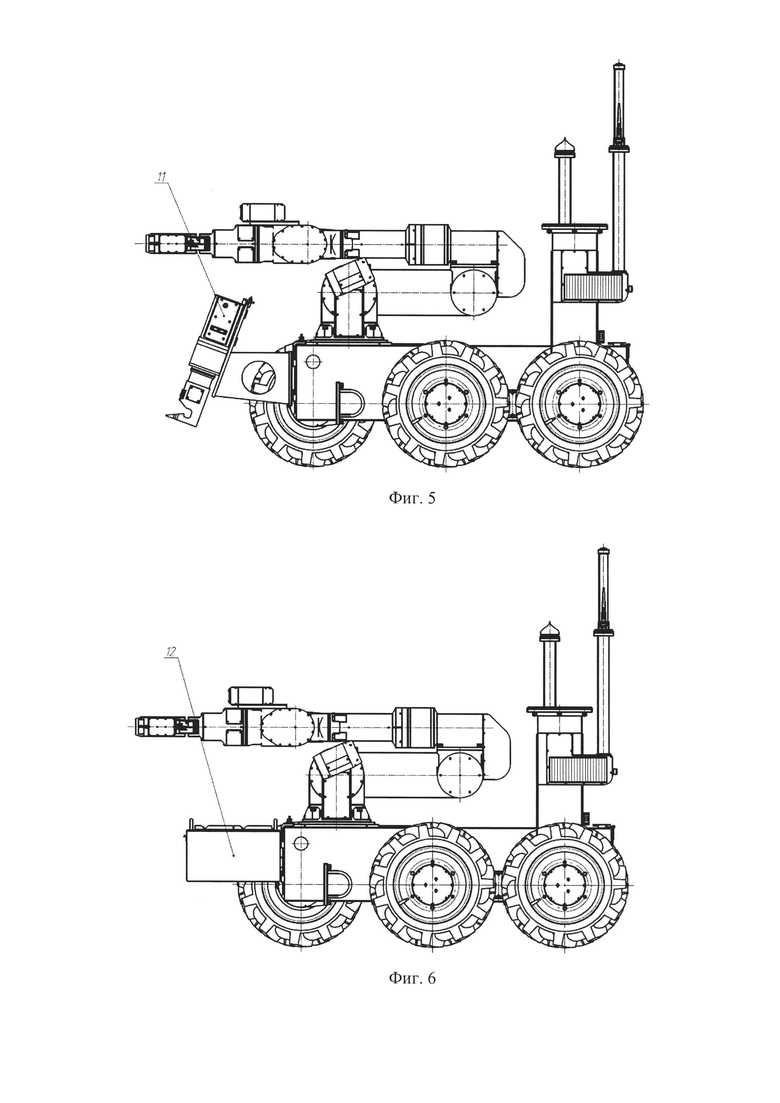
СТР с установленным на него сменного комплектом инструмента в виде дрели и кусачек (11) показано на фиг.5.
СТР с установленным на него комплекта модулей для отбора проб грунта (12) показано на фиг.6.
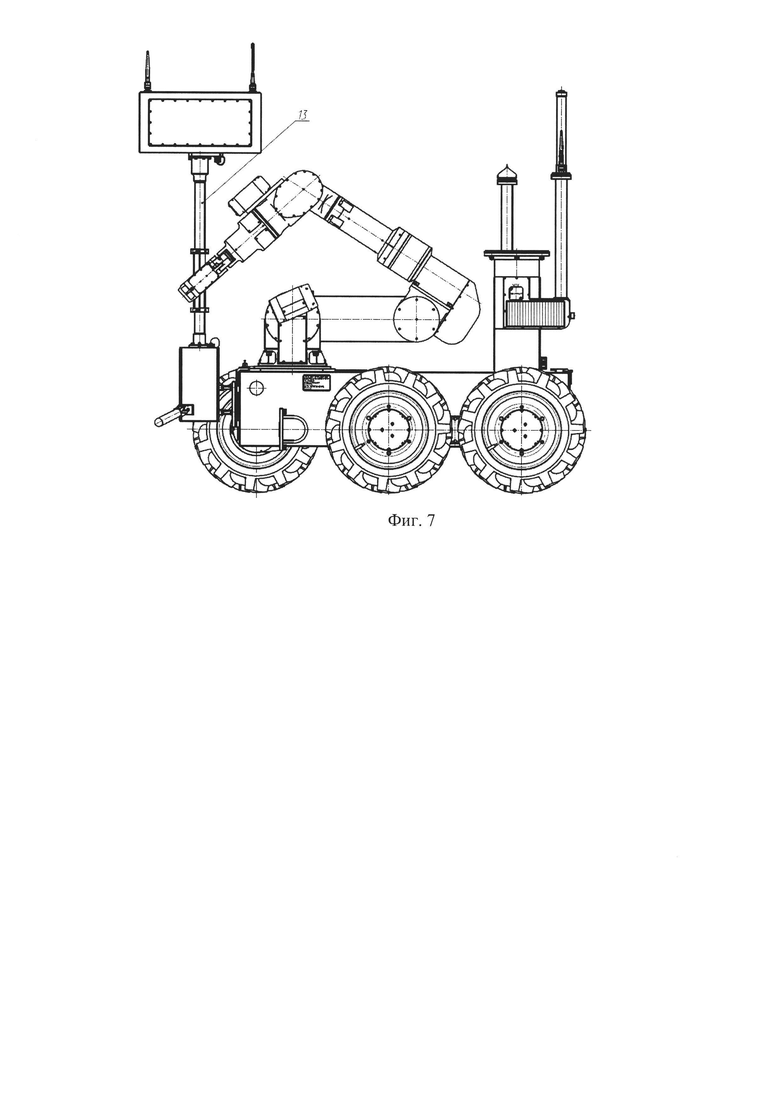
СТР с установленным на него переносным ретранслирующим устройством для увеличения дальности действия связи посредством радиоканала (13) показано на фиг.7.
СТР функционирует следующим образом. После снаряжения шасси (1) СТР необходимым оборудованием, СТР выдвигается в район назначения. Управление СТР и получение видеоизображения с бортовой телевизионной системы (6) и (7) осуществляют с поста дистанционного управления посредством системы передачи данных (5). В зависимости от поставленной задачи СТР может проводить дозиметрическую разведку и поиск источников ионизирующего излучения с помощью дозиметрического оборудования (8), и выполнять химическую разведку с помощью газоанализатора (9).
При снаряжении СТР модулем обозначения опасных участков местности (10), по команде оператора происходит отстрел флажков в вертикальном направлении с надежной фиксацией в грунте в требуемых точках (например, для обозначения границ опасных участков).
Для работы со сменным оборудованием (11) (комплектом инструмента) реализованы автоматические функции взятия инструмента и перевода в рабочую готовность. После перевода дополнительного оборудования (инструмента) в рабочую готовность оператор в системе координат инструмента совершает перемещения по трем ортогональным осям и осуществляет поворот инструмента по трем углам. После вывода инструмента в требуемое положение оператор осуществляет его запуск и, при необходимости, перемещение в нужном направлении (например, в осевом направлении при выполнении сверления), при этом скорость перемещения инструмента задает оператор. После выполнения требуемых операций оператор выдает команду на перемещение манипулятора с дополнительным оборудованием (инструментом) в транспортный отсек. Операция возврата манипулятора в исходное состояние (перемещение в транспортный отсек) осуществляется в автоматическом режиме.
Отбор проб грунта осуществляют при снаряжении СТР модулем пробоотбора (12). Для начала операции оператор в диалоговом окне пульта выбирает пробоотборник грунта и дает команду на его активацию, после чего манипулятор осуществляет его захват из модуля пробоотбора (12) и переводит в положения готовности. Далее оператор, ориентируясь на данные с видеоблоков, ориентирует манипулятор над областью, в которой предполагается выполнения пробоотбора грунта, и выдает команду на построение 3D карты. После получения команды манипулятор посредством видеокамеры, установленной на нем, осуществляет съемку указанной области с нескольких ракурсов, двигаясь по заранее рассчитанной траектории и обеспечивая позиционирование видеокамеры с заданной точностью, полученные изображения автоматически обрабатываются в центральном вычислителе и по результатам обработки автоматически строится 3D карта указанной области. Оператор выбирает на карте точку пробоотбора и осуществляет целеуказание, после чего манипулятор в автоматическом режиме осуществляет отбор пробы грунта, возвращает пробоотборник на место и переходит в положение готовности к выполнению следующих команд.
Отбор проб воды и воздуха осуществляется аналогично работе со сменным оборудованием. Манипулятор по команде оператора в автоматическом режиме осуществляет захват пробоотборника и перевод его в рабочее положение, далее оператор, используя перемещение в системе координат рабочего органа манипулятора, осуществляет наполнение пробоотборника требуемой средой, после чего манипулятор в автоматическом режиме возвращает пробоотборник на место.
При оснащении СТР переносным ретранслирующим устройством (13) оператор выдает команду на его перемещение в заданную точку. При этом для определения положения СТР оператор может использовать информацию со встроенного модуля бортовой навигации. При достижении заданной области СТР по команде оператора автоматически осуществляет захват переносного ретранслирующего устройства и переводит его в готовность к установке, после чего оператор осуществляет установку в ручном режиме, перемещая переносное ретранслирующее устройство аналогично сменному оборудованию (11). После установки ретранслирующего устройства СТР по команде оператора осуществляет перемещение в сторону от него и оператор переключает канал связи на ретранслирующее устройство, а с него подключается к СТР и может продолжать работу в расширенном по дальности диапазоне радиопередачи. После завершения миссии оператор СТР в ручном режиме управления захватывает манипулятором переносное ретранслирующее устройство и перемещает СТР в исходную точку или на новую позицию. Перемещение СТР осуществляется в ручном режиме с использованием данных модуля бортовой навигации и системы видеонаблюдения, все перемещения СТР накладываются на карты местности, загруженные в пульт управления, с использованием данных геолокации, получаемых от СТР.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2709074C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Средство транспортное роботизированное (далее СТР) включает шасси, средства связи с постом дистанционного управления и бортовую телевизионную систему, включающую отдельные видеоблоки. Один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. СТР дополнительно снаряжено блоками дозиметрии, блоком газоанализатора, модулем обозначения опасных участков местности, комплектом сменного инструмента, комплектом пробоотборников и переносным ретранслирующим устройством. Достигается возможность выполнения в автоматическом режиме радиационной и химической разведки, отбора пробы грунта воды и воздуха, обозначения опасных участков местности и получения непрерывной визуальной информации о месте работ. 7 ил.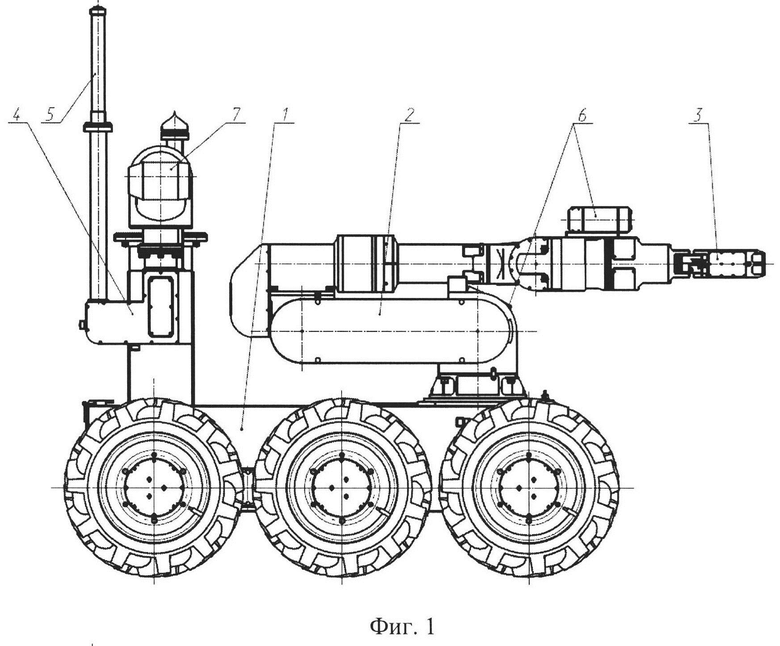
Средство транспортное роботизированное (СТР), представляющее собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе СТР, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на СТР укреплены манипулятор с захватным устройством и его приводы, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, отличающееся тем, что в его состав дополнительно включено дозиметрическое оборудование, модуль газоанализатора, модуль обозначения опасных участков местности, сменный комплект инструмента, содержащий дрели и кусачки, комплект модулей для отбора проб грунта, переносное ретранслирующее устройство, при этом возможность автоматизированного использования перечисленного оборудования обеспечивается включением в состав СТР радиационно-стойких датчиков углов поворота в шарнирах манипулятора и редукторов высокой точности, а для управления манипулятором введена трехуровневая система управления, выполненная на радиационно-стойких комплектующих.
| ДЕЭМУЛЬГАТОР ДЛЯ ОБЕЗВОЖИВАНИЯ И ОБЕССОЛИВАНИЯ | 0 |
|
SU208156A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПОЛУФАБРИКАТОВВВОДОВ | 0 |
|
SU180696A1 |

