Изобретение относится к области машиностроения, в частности энергомашиностроения, и может использовано при проектировании и разработке ветродвигательных установок (ВДУ) крыльчатого типа различного назначения.
В настоящее время, а возможно и в перспективе, одной из актуальных и технически сложных задач в этой области, является создание простых и надежных ВДУ, в которых обеспечивается их защита от поломки и разрушения при сильных порывах ветра, а также стабилизация скорости вращения ветроколеса (ВК) при различной скорости ветра и при различной нагрузке ВДУ.
Основным техническим решением этой задачи являются ВДУ, в которых применена система поворота лопастей ветроколеса вокруг их продольной оси с целью изменения угла между плоскостью вращения ВК и плоскостью лопасти.
Большинство ВДУ отличаются друг от друга, в основном, конструкцией устройства для регулирования угла установки лопасти - ϕ.
Анализ доступных литературных источников показывает, что в настоящее время не существует эффективных и при этом простых и надежных конструкций указанных устройств [1, 2].
Известны устройства для регулирования угла установки лопастей ВК, в которых регулирующим органом являются сами лопасти, а в качестве датчика скорости вращения ВК применен центробежный регулятор с грузами и пружиной. Такие устройства называют регуляторами прямого центробежного регулирования [3].
При изменении скорости вращения ВК грузы, связанные через рычаги с лопастями и пружиной, преодолевают сопротивление пружины, поворачивают лопасти и устанавливают их в нужное положение. Описанное устройство является малоэффективным и применимо только для ВДУ небольшой мощности.
Другим известным устройством для регулирования угла ϕ является устройство аэродинамического регулирования [3]. В этом устройстве лопасти являются одновременно датчиком скорости и регулирующим органом. Усилия от момента, поворачивающего лопасть вокруг продольной оси, через систему рычагов передаются на муфту регулятора, скользящего по валу ВК. С другой стороны муфта через трос и специальный механизм связана со свободно висящим грузом. Усилия, действующие на муфту, уравновешиваются при определенном, заданном угле ϕ, и заданной скорости вращения ВК.
Данное устройство является сложным, громоздким и имеет низкую надежность.
Наиболее близким к предлагаемому ветродвигателю техническим решением, которое может быть выбрано за прототип, является стабилизаторный регулятор, описанный в [3]. В этом устройстве лопасти ВК могут свободно вращаться вокруг своей продольной оси. На оси установлен скользящий по ней центробежный груз. Сзади к лопасти прикреплен дополнительный плоский стабилизатор, связанный с грузом системой тяг. Настройка регулятора осуществляется с помощью пружины. Стабилизатор устанавливает лопасти под определенным углом к его плоскости вращения. При номинальной скорости вращения ВК аэродинамические силы, действующие на лопасти, и центробежные силы, действующие на элементы стабилизатора, находятся в равновесии. При изменении скорости и силы ветра и отклонении скорости вращения ВК от номинального значения срабатывает регулятор и изменяет угол установки лопастей ВК. Вследствие этого его скорость возвращается к значению близкому к первоначальному.
Недостатки прототипа:
- высокая сложность регулятора;
- наличие большого количества трущихся элементов;
- наличие громоздких деталей, расположенных вне габаритов ВК;
- низкая надежность;
- низкая эффективность;
- низкий коэффициент стабилизации скорости вращения.
При использовании изобретения решается задача создания простой, компактной и надежной ВДУ, обеспечивающей высокий коэффициент стабилизации скорости вращения ВК в широком диапазоне скорости и силы ветра, а также защиту ВК от разрушения при сильных порывах ветра.
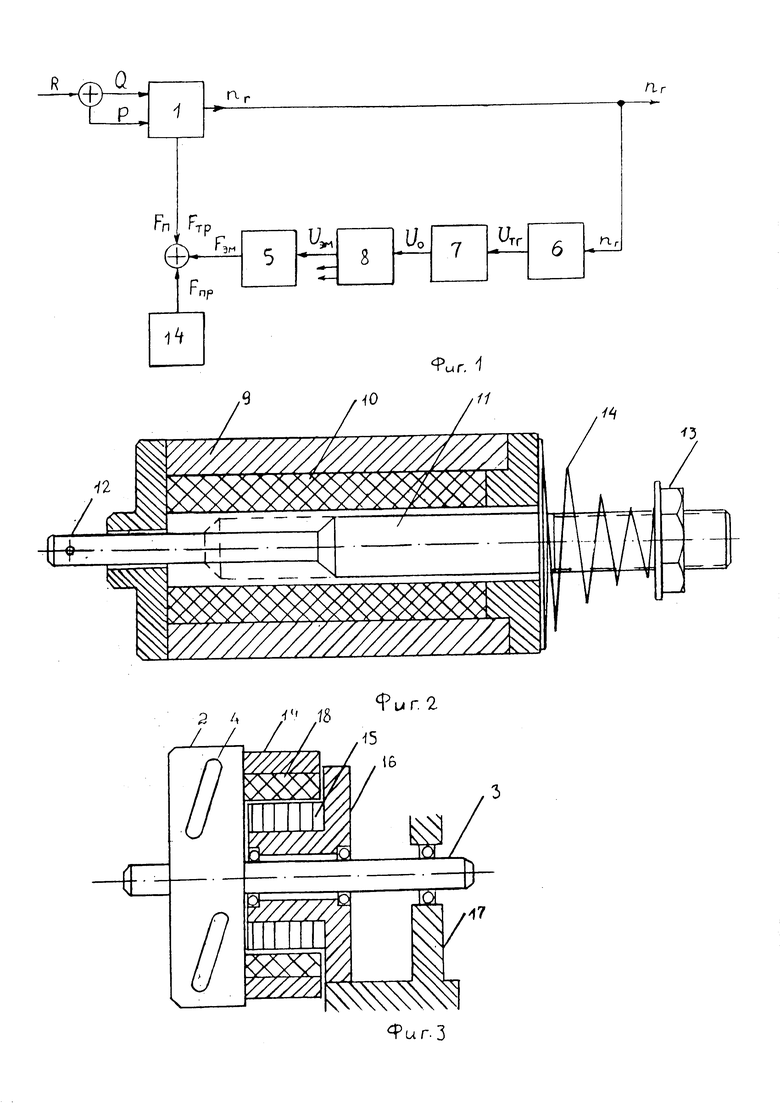
Структурная схема ветродвигателя (ВД) представлена на Фиг. 1. Ветродвигатель содержит ВК 1, состоящее из ступицы 2, закрепленной на главном валу (ГВ) 3, N лопастей 4, которые установлены таким образом, что могут свободно вращаться на подшипниках вокруг своей продольной оси, а также закрепленных на ступице 2 N электромагнитов постоянного тока (ЭМ) 5 и общих для всех лопастей тахогенератора (ТГ) 6, выпрямителя (В) 7 и резисторного симметрирующего устройства (СУ) 8 с N выходами. Электромагниты могут быть установлены как снаружи ступицы, так и внутри нее.
Ветродвигатель предназначен для работы в составе ВДУ, которая, кроме ВД, обычно содержит электрический генератор, мультипликатор (редуктор), соединительные муфты и другие механизмы, а также хвостовое устройство, платформу, мачту и т.д.
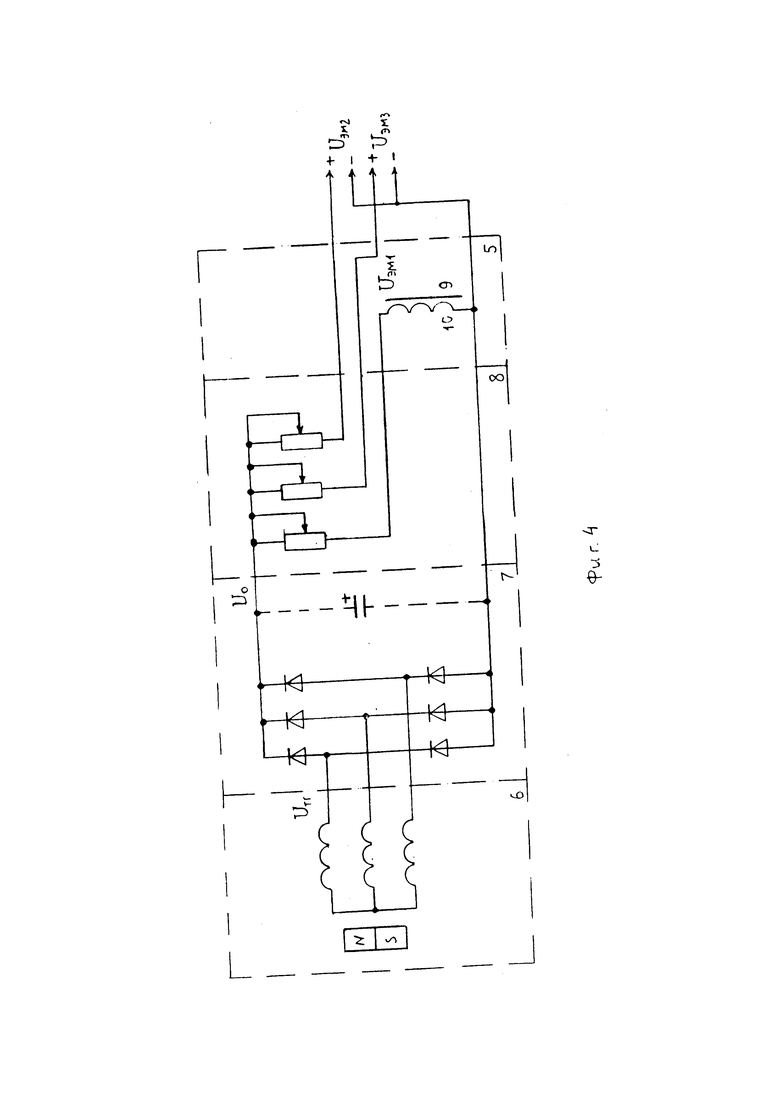
Эскиз электромагнита 5 приведен на Фиг. 2 [4]. Электромагнит содержит магнитопровод 9, обмотку 10 и подвижный сердечник 11. Один конец сердечника через шток 12 и кронштейн связан с основанием лопасти 4 в ее крайней нижней части и воздействует на нее для поворота вокруг продольной оси и изменения угла установки ϕ. На другом конце сердечника 11 предусмотрены резьба и регулировочная гайка 13, а также закреплена возвратная пружина 14. При работе ВДУ пружина 14 удерживает сердечник 11 в нужном положении, а также устанавливает его в нейтральное положение после снятия напряжения с обмотки электромагнита. Гайка 13 служит для регулирования силы упругости пружины и, тем самым, установки номинальной скорости вращения главного вала nгв.
В предлагаемом ВД применен трехфазный тахогенератор 6 с постоянными магнитами, эскиз которого приведен на Фиг. 3 [5]. Его особенность заключается в том, что статор с постоянными магнитами 15 и немагнитной втулкой 16 (неподвижная часть ТГ) закреплен на платформе 17 ВДУ, а ротор с трехфазной обмоткой 18 и магнитопроводом 19 (вращающаяся часть ТГ) установлен на ступице 2 ВК 1 и вращается вместе с ГВ 3.
Симметрирующее устойство 8 служит для проведения балансировки ВК и устранения неравномерности его работы, возникающей вследствие разброса параметров элементов, входящих в контур регулирования. Балансировка ВК делается при регулировке и настройке ВДУ. Выравнивание режимов работы лопастей производится с помощью переменных резисторов, входящих в СУ 8.
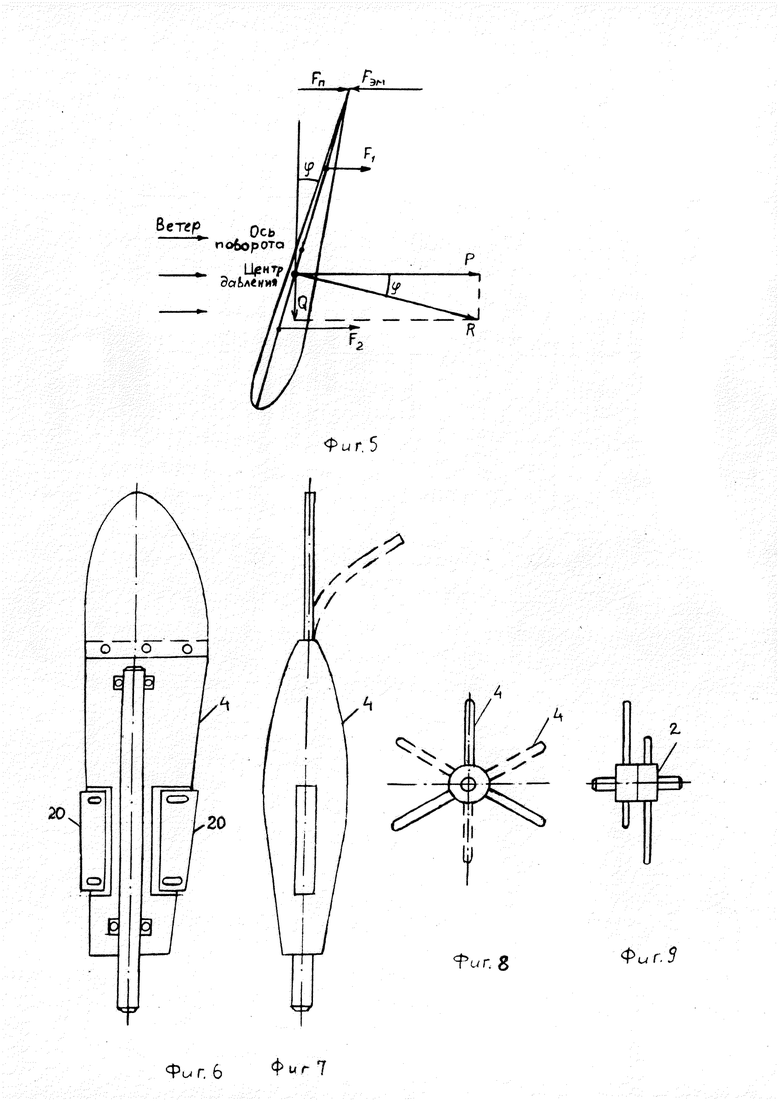
Электрическая принципиальная схема включения узлов ВД приведена на Фиг. 4. Электрическая часть ВД работает следующим образом.
С выхода ТГ 6 трехфазное напряжение, Uтг пропорциональное скорости вращения ВК 1 и ГВ 3 nгв поступает на вход выпрямителя 7, собранного, например, про трехфазной мостовой схеме. Выпрямленное напряжение U0 подается на вход резисторного СУ 8, имеющего N выходов. С каждого выхода СУ 8 напряжение Uэм поступает на обмотку 10 одного из электромагнитов (ЭМ) 5.
Приведем анализ сил, действующих на лопасти ВК и другие узлы, входящие в предлагаемый ВД. При работе ВДУ на лопасти ВК действуют аэродинамические силы набегающего воздушного потока. Полная аэродинамическая сила R может быть разложена на две составляющие - силу лобового давления (сопротивления) Р и окружную силу Q, которая обеспечивает вращение ВК 1 и ГВ 3 (Фиг. 5):


где ϕ - угол установки плоскости лопастей ВК 1 относительно плоскости его вращения.
Скорость вращения ВК 1 и ГВ 3 nгв зависит от скорости ветра, величины нагрузки ВДУ, а также угла установки лопастей ϕ. Система регулирования обеспечивает постоянную скорость вращения nгв при воздействии любых возмущающих факторов в определенных пределах изменением угла установки ϕ.
При работе ВДУ положение лопастей, т.е. угол ϕ, и следовательно скорость вращения nгв определяются значением действующих на них сил:
- результирующей аэродинамической силой поворота лопасти вокруг своей оси Fп;
- силой трения в опорах отдельных механизмов Fтр;
- силой тяги электромагнита Fэм;
- силой упругости возвратной пружины Fпр.
В установившемся режиме указанные силы находятся в равновесии в соответствии с уравнением:

Аэродинамическая сила поворота лопасти вокруг оси Fп определяется силой лобового давления Р. В связи с тем, что ось вращения лопасти делит ее на две части - левую и правую, сила Fп является результирующей двух сил F1 и F2, причем Fп=F1-F2. Сила F1 стремится повернуть лопасть по ходу часовой стрелки, a F2 - против. При этом, например, при увеличении скорости ветра сила F1 стремится увеличить угол ϕ и, тем самым, увеличить скорость вращения nгв, а сила F2 - уменьшить угол ϕ и скорость nгв. Силы F1 и F2 пропорциональны площади поверхности левой и правой частей лопасти - S1 и S2. При конструировании ВДУ может быть выбрано различное соотношение между S1 и S2. При S1>S2 Fп имеет положительное значение и необходимая сила тяги ЭМ должна быть больше (пояснение см. ниже), а при S1<S2 Fп имеет отрицательное значение и аэродинамическая сила поворота лопасти является активной положительной силой регулирования скорости вращения nгв.
Формула для расчета Fп имеет следующий вид:

где ε=(S1-S2)/S - коэффициент, определяемый соотношением между S1 и S2;
S - площадь поверхности всей лопасти.
Сила Fтр обусловлена трением отдельных частей механизмов регулятора друг о друга при повороте лопасти вокруг оси, а также центробежной силой, действующей на лопасти при их вращении вокруг главной оси:

где kтр - коэффициент, зависящий от конструкции ВК, его размеров и массы. Предварительно kтр определяется экспертным путем, а затем уточняется по результатам испытаний.
Электромагниты являются именно теми элементами регулятора, которые обеспечивают преодоление аэродинамической силы поворота лопастей вокруг своей оси, силы трения и других сил и установку лопастей ВК в нужное положение.
Сила тяги электромагнита

где Uэм - напряжение на обмотке ЭМ, поступающее с выхода СУ 8;
kэм - коэффициент, зависящий от размеров и других параметров ЭМ.
Его значение определяется при расчете и испытаниях ЭМ.
Напряжение на обмотке ЭМ Uэм и сила тяги ЭМ Fэм определяются на основании следующих соотношений:



где Uтг - выходное напряжение ТГ;
U0 - напряжение на выходе В;
kтг - коэффициент, определяющий зависимость Uтг от его параметров;
kв - коэффициент выпрямления. Определяется схемой В;
kсy - коэффициент симметрирования, который устанавливается при настройке и регулировке ВДУ.
После подстановки выражений (7)÷(9) в выражение (6) получаем

Установленная при настройке ВДУ действующая сила упругости (сжатия) возвратной пружины

где Fпp max - сил а пружины при максимальной деформации;
kпр - номинальный коэффициент жесткости пружины, который определяется необходимой силой ее предварительного сжатия и устанавливается с помощью регулировочной гайки при настройке и регулировке ВДУ. В процессе работы ВДУ kпр практически не изменяется.
Сила Fпр должна быть достаточной, чтобы при отсутствии ветра (nгв=0) и, следовательно, напряжения на обмотке ЭМ, обеспечивать возврат лопасти ВК в исходное (нейтральное) положение.
Подставляя выражения (4), (5), (10) и (11) в выражение (3), получаем уравнение, определяющее зависимость скорости ветроколеса от полной аэродинамической силы R. При решении уравнения- применяем аппроксимацию функций sinϕ и cos ϕ: sinϕ=ϕ, cosϕ= 1-0.25ϕ. Анализ показывает, что при угле ϕ, лежащем в пределах 0-30 градусов, указанная аппроксимция обеспечивает достаточную точность расчетов.
После решения уравнения и проведения необходимых преобразований была получена зависимость nгв=ƒ(R), а также зависимость изменения скорости вращения Δnгв от изменения полной аэродинамической силы ΔR:
Δnгв=ƒ(ΔR).
Анализ полученных результатов показывает, что ветродвигатель обеспечивает высокий коэффициент стабилизации nгв, при изменении R в широких пределах, а при равенстве площади левой и правой частей лопастей ВК сила = 0 и указанная нестабильность близка к нулю при любой, допустимой по условиям прочности конструкции, скорости ветра.
Нужное значение может быть получено изменением соотношения между площадями S1 и S2. Для этого на центральной части лопастей с одной или обеих боковых сторон могут быть предусмотрены выдвижные закрылки 20, позволяющие изменять S1 и S2 (Фиг. 6, Фиг. 7). При сборке и регулировке ВДУ закрылки устанавливаются в оптимальное положение, которое определяется экспериментально.
При наличии закрылок ось вращения лопастей целесообразно располагать посередине. В процессе эксплуатации ВДУ изменение положения закрылок не предусматривается.
Для защиты от разрушения лопастей ВК и других частей ВДУ при сильных порывах ветра лопасти могут быть выполнены состоящими из двух частей по их длине - центральной и концевой (Фиг. 6, Фиг. 7). Центральная часть лопасти объемная и установлена на оси вращения на подшипниках, а концевая плоская и изготовлена из гибкого и упругого листового материала, например, листовой стали, неметаллических композитных материалов (стеклопластика) и др. и закреплена на центральной части.
Такая конструкция лопастей обеспечивает возможность изгиба их концевой части при сильных порывах ветра. Вследствие этого, возможны два режима работы ВК:
- при слабой и средней силе ветра концевая часть лопасти находится в исходном (нейтральном) положении;
- при сильном ветре и его порывах концевая часть - в изогнутом положении.
При изгибе лопасти эффективная (действующая) площадь ее поверхности уменьшается (Фиг. 7), что приводит к автоматическому уменьшению действующей на нее окружной силы и скорости вращения ВК и, тем самым, обеспечивает быстродействующую (мгновенную) защиту лопастей ВК и других частей ВДУ от разрушения.
Для повышения эффективности ВДУ и коэффициента использования энергии ветра может быть применена конструкция ВК, имеющего удвоенное (четное) количество лопастей (4, 6, 8…) и сдвоенную ступицу, лопасти на которой расположены в шахматном порядке (Фиг. 8, Фиг. 9).
При использовании такой конструкции ВК сокращается число узлов регулятора скорости вращения, уменьшаются объем и масса ВДУ на единицу выходной мощности, а ее эффективность повышается.
Предлагаемый ветродвигатель является замкнутой системой автоматического регулирования (САР) скорости вращения ВК и ГВ при возмущающем воздействии скорости и силы ветра. САР состоит из объекта регулирования - ветроколеса и его регулятора скорости вращения. В состав регулятора входят датчик регулируемого параметра - тахогенератор, опорный элемент - пружина с гайкой, усилитель и преобразователь сигнала рассогласования - электромагнит и исполнительный элемент - лопасти ветроколеса.
Ветродвигатель работает следующим образом. При средней скорости ветра и номинальной скорости вращения ВК и ГВ nгв напряжение на выходе ТГ имеет номинаньное значение Uтг, сердечник ЭМ находится в промежуточном положении и шток ЭМ удерживает лопасть ВК в определенном положении под углом ϕ0 по отношению к плоскости вращения ВК. При изменении скорости и силы ветра, например при их увеличении, полная аэродинамическая сила R и окружная сила Q увеличиваются, вследствие чего скорость ВК и ГВ nгв также увеличиваются. Выходное напряжение ТГ возрастает, сила втягивания сердечника ЭМ и давление на шток увеличиваются, шток через кронштейн воздействует на лопасть, угол ее поворота и окружная сила Q уменьшаются и скорость вращения nгв возвращается практически к первоначальному значению.
Новым в предлагаемом изобретении является:
- использование специального ТГ в качестве датчика, формирующего напряжение, пропорциональное скорости вращения ВК и ГВ;
- использование ЭМ в качестве усилителя сигнала и преобразователя сигнала, осуществляющего изменение угла поворота лопасти ВК;
- применение усовершенствованной конструкции лопасти ВК, что обеспечивает быстродействующую защиту элементов конструкции от разрушения при сильных порывах ветра;
- применение сдвоенной ступицы и четного количества лопастей, что позволяет повысить эффективность ВДУ, снизить ее удельные объем и массу на единицу мощности.
На основании изложенного может быть сделан вывод, что предлагаемое устройство позволяет получить положительный технический эффект.
Изобретение является новым, т.к. при анализе доступных источников информации не выявлено аналогов с подобной совокупностью существенных признаков.
Предлагаемое изобретение является промышленно применимым, т.к. может быть использовано при создании ВДУ различного назначения.
ЛИТЕРАТУРА
1. Виды ветрогенераторов rhttp://www.solarroof.ru/theory/29/76).
2. Ветрогенераторы: как они работают и возможны ли в России. Популярная механика, (http://www.popmech.ru/tehnologies/10268).
3. Андрианов В.Н., Быстрицкий Д.Н., Вашкевич К.П., Секторов В.Р. Ветроэлектрические станции. - М., Л.; ГЭИ, 1960.
4. Сливинская А.Г. Электромагниты и постоянные магниты. М., Энергия, 1972.
5. Бертинов А.И. Авиационные электрические генераторы. М., Оборонгиз, 1959.
Краткое описние чертежей
Фиг. 1 - Структурная схема ветродвигателя
Фиг. 2 - Эскиз электромагнита
Фиг. 5 - Эскиз трехфазного тахогенератора
Фиг. 4 - Электрическая принципиальная схема включения узлов ветродвигателя
Фиг. 5 - Векторная диаграмма аэродинамических сил, действующих на лопасти ветрового колеса
Фиг. 6 - Эскиз лопасти ветрового колеса с закрылками (главный вид)
Фиг. 7 - Эскиз лопасти ветрового колеса, состоящего из двух частей (вид сбоку)
Фиг. 8 - Эскиз ветрового колеса со сдвоенной ступицей (вид спереди)
Фиг. 9 - Эскиз ветрового колеса со сдвоенной ступицей (вид сбоку)
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОДВИГАТЕЛЬ | 2011 |
|
RU2464444C1 |
| КАРУСЕЛЬНЫЙ ВЕТРОДВИГАТЕЛЬ | 2014 |
|
RU2563949C1 |
| Ветродвигатель | 1988 |
|
SU1550209A1 |
| Ветродвигатель | 2015 |
|
RU2607449C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2018 |
|
RU2697075C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2005 |
|
RU2305204C2 |
| Ветродвигатель | 1990 |
|
SU1799431A3 |
| ВЕТРОДВИГАТЕЛЬ | 2004 |
|
RU2269674C2 |
| РОТОРНО-КРЫЛЬЧАТЫЙ ДВИГАТЕЛЬ ДЛЯ КОНВЕКЦИОННЫХ ВОЗДУШНЫХ И ЖИДКОСТНЫХ ПОТОКОВ | 2005 |
|
RU2300011C1 |
| ВЕТРОЭЛЕКТРОГЕНЕРАТОР | 2003 |
|
RU2245458C1 |
Изобретение относится к области машиностроения, в частности энергомашиностроения, и создания ветродвигательных установок (ВДУ). Ветродвигатель содержит ступицу, N лопастей, N электромагнитов, специальный тахогенератор, выпрямитель и симметрирующее устройство. Один конец сердечника электромагнита через шток и кронштейн связан с основанием лопасти, на другом конце сердечника закреплены возвратная пружина и регулировочная гайка, а к обмотке электромагнита через выпрямитель и симметрирующее устройство подключен выход трехфазного тахогенератора. При использовании изобретения достигается упрощение конструкции ВДУ и повышение ее надежности, а также обеспечение стабилизации скорости вращения ветроколеса и защиту элементов ВДУ от разрушения при сильных порывах ветра. 2 з.п. ф-лы, 9 ил.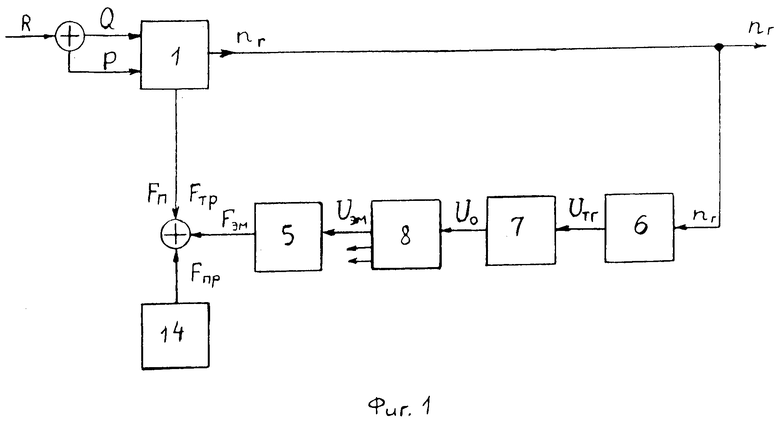
1. Ветродвигатель, содержащий ступицу, закрепленную на главном валу, N лопастей, установленных на ступице таким образом, что они могут свободно вращаться на своей продольной оси, отличающийся тем, что в него введено N электромагнитов постоянного тока, состоящих из магнитопровода, обмотки и подвижного сердечника, первый конец сердечника через шток и кронштейн связан с основанием лопасти, на втором конце сердечника закреплены возвратная пружина и регулировочная гайка, а к обмотке электромагнита через выпрямитель и симметрирующее устройство подключен выход трехфазного тахогенератора, состоящего из магнитопровода и роторной обмотки, жестко связанных со ступицей, а также статора с постоянными магнитами, установленного на неподвижной платформе ветродвигательной установки.
2. Ветродвигатель по п. 1, отличающийся тем, что лопасти состоят из двух частей по их длине - центральной и концевой, центральная часть выполнена объемной и содержит продольную ось вращения, а концевая часть выполнена из гибкого и упругого листового материала и закреплена на центральной части, в которой предусмотрены выдвижные закрылки, позволяющие изменить соотношение между частями площади поверхности лопасти, расположенными слева и справа от ее продольной оси.
3. Ветродвигатель по п. 1, отличающийся тем, что при числе лопастей N=4, 6, 8… ступица выполнена сдвоенной и лопасти на ней расположены в шахматном порядке.
| Устройство для измерения напряженности электрического поля | 1949 |
|
SU86672A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ УГЛА УСТАНОВКИ ЛОПАСТЕЙ ВЕТРОТУРБИНЫ | 2015 |
|
RU2605490C2 |
| МЕХАНИЗМ ПОВОРОТА ЛОПАСТЕЙ ВЕТРОКОЛЕСА | 2011 |
|
RU2480619C2 |
| US 20170268485 A1, 21.09.2017. | |||

