Изобретение относится к области электротехники, в частности к устройствам для отработки кнопочных пультов, устанавливаемых с внешней стороны обитаемых подводных объектов.
Известны электромеханические исполнительные механизмы и устройства для дистанционного перемещения подвижных конструктивных элементов технических объектов и устройств.
Известен электромеханический исполнительный механизм - линейный электродвигатель [RU №2700666, МПК H02K 33/02, опубликовано 18.09.2019, бюл. №26], содержащий магнитный корпус, в котором расположена создающая магнитный поток обмотка (намагничивающая катушка) с магнитным якорем, поджатым возвратной пружиной. Возвратная пружина установлена на якорь между магнитопроводом и шайбой, закрепленной с торца якоря. Якорь состоит из верхней магнитной втулки, средней магнитной втулки, нижней магнитной втулки, верхнего немагнитного кольца, нижнего немагнитного кольца, насаженных на немагнитный стержень.
Данное устройство согласно описанию обеспечивает повышение силы тяги и коэффициента полезного действия. Однако оно не работоспособно в водной среде, которая, являясь в большинстве случаев проводником электрического тока, неизбежно выведет линейный электродвигатель из строя.
Известен электромеханический исполнительный механизм -линейный электродвигатель, наиболее близкий по технической сущности и принятый за прототип [RU №2694811, МПК H02K 33/02, опубликовано 17.07.2019, бюл. №20], содержащий магнитный корпус, в котором расположена создающая магнитный поток обмотка (намагничивающая катушка) с магнитным якорем, поджатым возвратной пружиной. Обмотка размещена в корпусе и установлена на немагнитный каркас, закрепленный на магнитопроводе. На каркасе установлены верхний, торцевой и нижний магнитные полюса, которые закреплены при помощи болтов к магнитному корпусу. Якорь выполнен с возможностью роли подшипников скольжения и состоит из верхнего магнитопровода, имеющего форму усеченного конуса, нижнего магнитопровода и немагнитной втулки, насаженных на немагнитный стержень. Известное устройство, согласно описанию, обеспечивает повышение силы тяги, а также улучшение массогабаритных показателей.
Однако его недостатком, как и вышеприведенного аналога, является ограниченная область применения из-за невозможности использования в водной среде. Даже при размещении известного устройства в герметичном кожухе его работоспособность будет существенно зависеть от глубины погружения, так как внешнее гидростатическое давление водной среды будет препятствовать перемещению якоря известного механизма вплоть до его полного блокирования. С увеличением глубины погружения для обеспечения работы механизма потребуется увеличение напряжения, подаваемого на обмотку, которое из-за ограничения плотности электрического тока через сечение провода обмотки имеет свое предельное значение. Неизбежный повышенный нагрев обмотки при этом ограничит время работы механизма и потребует продолжительных перерывов в его работе, необходимых для охлаждения. Указанное обстоятельство значительно ограничивает область применения известного механизма. Кроме того известное устройство требует точной осевой установки относительно объекта воздействия (например кнопок пульта), что усложняет его применение.
Анализ конструкций известных устройств позволяет сделать вывод, что известный уровень техники не обеспечивает создания электромеханического исполнительного механизма для эксплуатации в водной среде без ограничений ее электропроводности и глубины погружения устройств.
Задачей заявляемого изобретения является повышение надежности работы при расширении области применения.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение надежности работы при значительном внешнем гидростатическом давлении воды без ограничений ее электропроводности и глубины погружения механизма.
Указанный технический результат достигается тем, что глубоководный электромеханический исполнительный механизм, включающий магнитный корпус, в котором расположена создающая магнитный поток, по крайней мере, одна обмотка с магнитным якорем, поджатым возвратной пружиной, согласно изобретению снабжен герметично установленной с торца корпуса со стороны выдвигаемого конца якоря эластичной манжетой, расположенной в непосредственной близости от якоря и отделяющей внутренний объем корпуса, полностью заполненный диэлектрической жидкостью, от внешней среды, при этом корпус выполнен герметичным и оснащен изолированными от него токовыводами, а якорь снабжен центральным подвижным штоком с фланцами на концах, поджатым пружиной в направлении рабочего перемещения якоря.
Оснащение электромеханического исполнительного механизма герметично установленной с торца корпуса со стороны выдвигаемого конца якоря эластичной манжетой, расположенной в непосредственной близости от якоря и отделяющей внутренний объем корпуса, полностью заполненный диэлектрической жидкостью, от внешней среды, при этом выполнение корпуса герметичным позволяет исключить перепад давления внутри и вне механизма, обеспечить требуемое электрическое сопротивление изоляции и осуществить передачу движения из герметичного объема через эластичную манжету, то есть обеспечить надежную работу механизма в любой (в том числе и электропроводящей) водной среде. Эластичная манжета обеспечивает минимальное изменение внутреннего объема при перемещении якоря, которое компенсируется за счет изменения диаметральных размеров эластичной манжеты.
Оснащение корпуса механизма изолированными от него токовыводами позволяет организовывать электрические цепи для подачи электропитания на обмотки механизма без нарушения герметичности корпуса.
Снабжение якоря центральным подвижным штоком с фланцами на концах, поджатым пружиной в направлении рабочего перемещения якоря, позволяет исключить требование по точности установки механизма. При неизменном осевом расположении магнитомягкого якоря поджатый пружиной шток отслеживает реальное расположение перемещаемого элемента объекта воздействия - «самоустанавливаясь» за счет своей подвижности в осевом направлении.
Кроме того установка фланца штока со стороны манжеты с возможностью изменения осевого размещения позволяет обеспечить технологичность настройки механизма, упростить регулировку механизма при сборке.
Кроме того выполнение внутренних объемов с торцов обмотки сообщающимися повышает быстродействие механизма, так как при этом обеспечивается ускоренное перетекание диэлектрической жидкости.
Кроме того снабжение якоря с обоих торцов втулками из антифрикционного материала снижает трение, то есть повышает надежность и ресурс механизма.
Кроме того оснащение закрепленной на корпусе в зоне токовыводов гибкой герметичной оболочкой, внутренний объем которой полностью заполнен диэлектрической жидкостью, позволяет организовывать защищенные от внешней водной среды электрические цепи, необходимые для работы механизма и обеспечивает работу механизма на любой глубине.
Кроме того использование диэлектрической жидкости с диапазоном рабочих температур, превышающим диапазон температур эксплуатации механизма, исключает разрушения корпуса механизма и гибкой герметичной оболочки, то есть позволяет обеспечить его надежную работу при требуемых температурах внешней среды.
Таким образом, совокупность всех изложенных выше признаков создает условия обеспечения надежной работы исполнительного механизма в любой (проводящей и непроводящей электрический ток) водной среде при значительных глубинах погружения.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами:
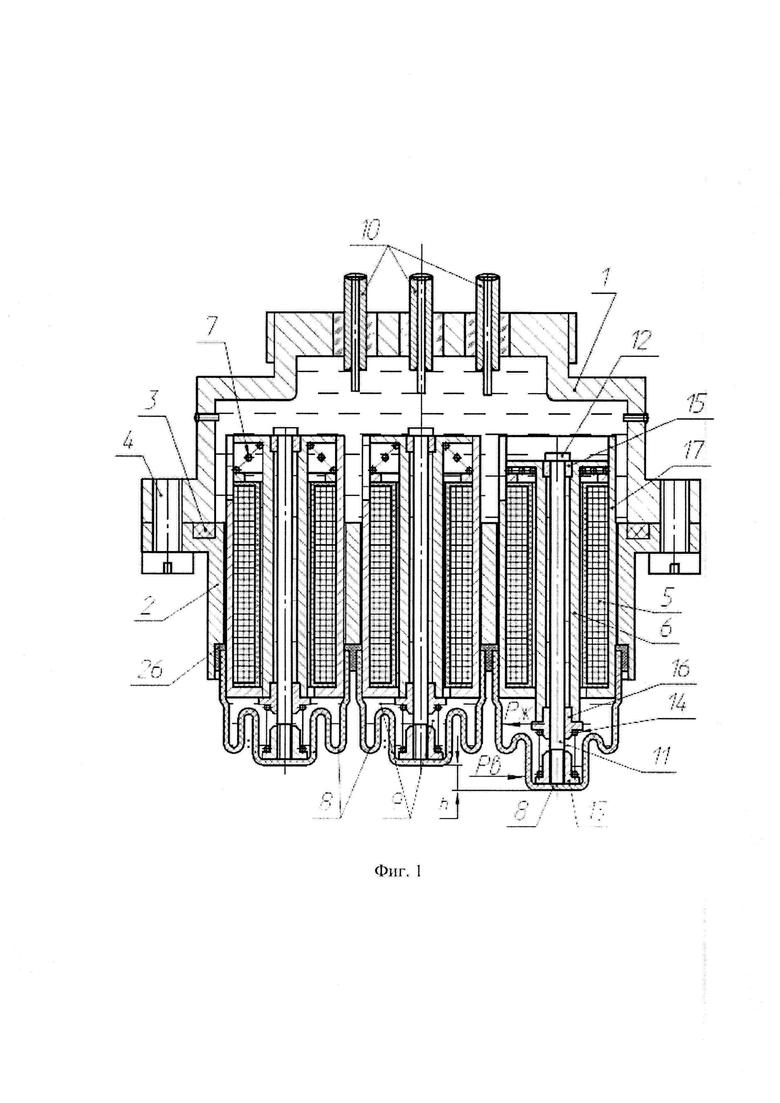
на фиг. 1 представлен осевой разрез глубоководного электромеханического исполнительного механизма, содержащего в общем корпусе, например, три обмотки. Крайняя слева и средняя обмотки находятся в исходном состоянии, а крайняя справа обмотка - в сработанном состоянии.
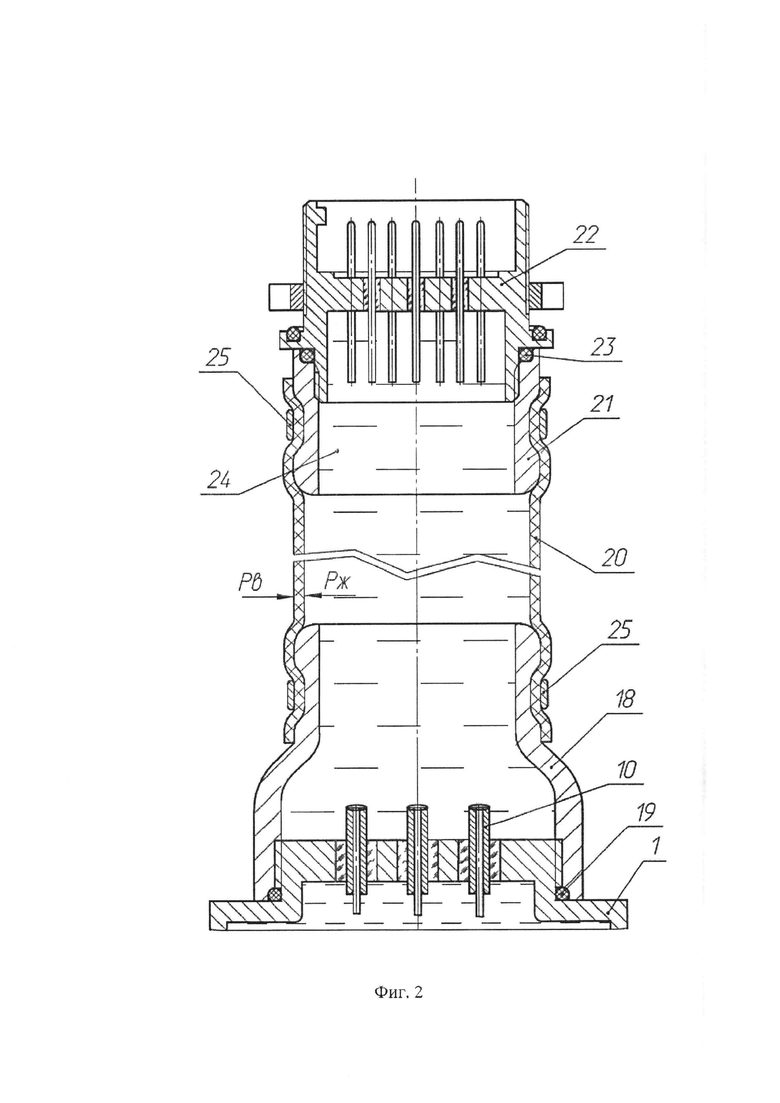
На фиг. 2 - конструкция гибкой герметичной оболочки для размещения соединительных проводов электрических цепей питания обмоток.
На указанных чертежах принимаются следующие обозначения:
1, 2 - составные части корпуса;
3 - уплотнительное кольцо;
4 - винт;
5 - обмотка;
6 - магнитомягкий якорь;
7 - коническая пружина;
8 - эластичная манжета;
9 - диэлектрическая жидкость;
10 - токовывод;
11 - шток;
12 - фланец;
13 - резьбовой фланец;
14 - пружина;
15, 16 - антифрикционная втулка;
17 - магнитопровод;
18 - соединительная втулка корпуса с оболочкой;
19 - уплотнительное кольцо;
20 - гибкая герметичная оболочка;
21 - втулка;
22 - вилка соединителя;
23 - уплотнительное кольцо;
24 - диэлектрическую жидкость;
25 - обжимное кольцо;
26 - герметик.
Устройство выполнено следующим образом.
Глубоководный электромеханический исполнительный механизм (фиг. 1-2) содержит корпус, состоящий из верхней 1 и нижней 2 корпусных частей, скрепленных винтами 4 и уплотненных кольцом 3 для герметизации внутреннего объема. Нижняя часть корпуса 2 выполнена из магнитомягкого ферромагнитного материала, например, электротехнической стали с защитным покрытием на внешней поверхности. В части 2 могут быть установлены несколько (по числу кнопок испытываемого пульта), например, три отдельных не соединенных друг с другом обмотки 5, каждая из них с магнитомягким якорем 6, поджатым конической пружиной 7. Эластичные манжеты 8, например, вулканизированные из смеси резиновой типа 51-1785 ТУ 2512-006-00149334-96, отделяют внутренний объем корпуса, заполненный диэлектрической жидкостью 9, от внешней среды. Диэлектрическая жидкость 9 типа ПМС-5 ГОСТ 13032-77 обеспечивает требуемое сопротивление изоляции электрических цепей во внутреннем объеме корпуса и, как несжимаемая, обеспечивает выравнивание давления с внешней средой. В верхней корпусной детали 1 размещены изолированные токовыводы 10 для организации электрических цепей питания каждой обмотки 5. В каждом якоре 6 обмоток 5 соосно установлен шток 11 с фланцем 12 на одном торце и резьбовым фланцем 13 на другом торце. Наличие резьбы позволяет устанавливать резьбовой фланец 13 по месту при сборке исполнительного механизма. Пружина 14 отжимает шток 11 в направлении перемещения якоря 6, компенсируя допуск выступания перемещаемых элементов объекта воздействия (не показано). Антифрикционные втулки 15, 16, запрессованные с обоих торцов у каждого якоря 6, выполненные, например, из бронзы или латуни, исключают заклинивание штока 11, повышая надежность работы. Магнитопроводы 17, выполненные, например, из электротехнической стали, и охватывающие соответствующие обмотки 5, обеспечивают малые рассеивания магнитного потока, создаваемого обмотками 5.
Втулка 18 герметично установлена на верхнюю корпусную деталь 1 с уплотнительным кольцом 19. На втулку 18 установлена гибкая эластичная оболочка (трубка) 20. Второй торец оболочки 20 закреплен на втулке 21, навернутый по резьбе на герметичную вилку электрического соединителя 22. Уплотнительное кольцо 23 герметизирует место соединения втулки 21 и вилки 22. Внутренний объем оболочки 20 заполнен диэлектрической жидкостью 24. Обжимные кольца 25 в дополнение клеевого соединения обеспечивают надежность мест сопряжения оболочки 20 на втулках 18, 21. Соединительные провода во внутреннем объеме оболочки 20 не показаны. Места установки эластичных манжет 8 на каждом магнитопроводе 17 загерметизированы клеевым соединением и герметиком 26.
Глубоководный электромеханический исполнительный механизм работает следующим образом.
При подаче электрического напряжения на одну из обмоток 5, например, крайнюю справа (на фиг. 1) создаваемым магнитным потоком якорь 6, преодолевая усилие поджатия конической пружины 7, перемещается на величину h (фиг. 1).
При прекращении подачи напряжения на указанную обмотку 5 коническая пружина 7 возвращает якорь 6 в исходное состояние. Перемещением якоря 6 обеспечивается воздействие на подвижные элементы объекта воздействия (не показано).
При погружении исполнительного механизма в водную среду внешнее давление Рв водной среды воздействует на наружную поверхность эластичных манжет 8, вызывает соответствующее изменение давления Рж диэлектрической жидкости 9, заполняющей внутренний объем исполнительного механизма.
При изменении (увеличении или уменьшении) глубины погружения разность давлений снаружи и внутри исполнительного механизма остается постоянной и определяется только упругими характеристиками эластичных манжет 8. Оснащение устройства эластичными манжетами 8 и заполнение внутреннего объема диэлектрической жидкостью 9 обеспечивает компенсацию изменения гидростатического давления внешней водной среды. Эластичные манжеты 8 также обеспечивают компенсацию температурного изменения объема диэлектрической жидкости 9. Герметичные эластичные манжеты 8. не нагружаемые значительными гидростатическими давлениями при любой глубине нахождения исполнительного механизма, обеспечивают надежную герметизацию внутреннего объема корпусных деталей 1, 2, а, следовательно, обеспечивают надежную работу в широком диапазоне внешнего гидростатического давления Рв, соответствующего глубинам от нуля до десятков метров.
При изменении внешнего гидростатического давления не изменяется величина перемещения каждого якоря 6 и выходное усилие, а, следовательно, и энергопотребление исполнительного механизма. Компенсация разности внешнего гидростатического давления и давления внутри оболочки 20 обеспечивается за счет упругих свойств оболочки 20 и свойств «несжимаемости» диэлектрической жидкости 24. Компенсация температурного изменения объема диэлектрической жидкости 24 также осуществляется за счет упругости стенок оболочки 20.
Таким образом, заявляемое техническое решение позволяет создать электромеханический исполнительный механизм, обеспечивающий надежную работу в любой водной среде на значительных глубинах.
Электромеханический исполнительный механизм также может быть работоспособен и в воздушной среде при широком диапазоне температур, влажности и атмосферного давления, где используемая, например, диэлектрическая жидкость ПМС-5 имеет рабочий диапазон температур от минус 60 до плюс 200°С. Компенсация изменения атмосферного давления внешней воздушной среды аналогична компенсации давления внешней водной среды.
Заявляемый механизм особенно эффективен как испытательное оборудование для кнопочных пультов, эксплуатируемых в любой водной среде, когда требуется подтверждение работоспособности (в том числе и наработка полного эксплуатационного ресурса) пультов с нормируемым силовым воздействием (нажатием) на кнопки во всем диапазоне требуемых глубин. Работа с подобным пультом исполнителя по причинам безопасности, значительной временной продолжительности и финансовых затрат зачастую неприемлема.
В настоящее время ведется разработка документации, запланированы изготовление и предварительные испытания опытных образцов глубоководного электромеханического исполнительного механизма, выполненного в соответствии с заявляемым изобретением. Работоспособность подтверждена расчетами.
Представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- заявляемый электромеханический исполнительный механизм предназначен для использования в качестве испытательной оснастки пультов управления, используемых в проводящей и непроводящей электрический ток водной среде в широком диапазоне глубин погружения;
- заявляемый электромеханический исполнительный механизм при использовании способен обеспечить надежность работы механизма в любой водной среде на значительных глубинах;
- для заявляемого электромеханического исполнительного механизма в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявленный глубоководный электромеханический исполнительный механизм соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик смены среды | 2020 |
|
RU2739215C1 |
| ГИДРОСТАТИЧЕСКИЙ ВКЛЮЧАТЕЛЬ | 2017 |
|
RU2677838C1 |
| ДАТЧИК ВСПЛЫТИЯ | 2021 |
|
RU2771887C1 |
| ПУЛЬТ УПРАВЛЕНИЯ | 2019 |
|
RU2734145C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2707879C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2421842C1 |
| ЭЛЕКТРОМАГНИТНЫЙ НАСОС | 2010 |
|
RU2424447C1 |
| ГИДРОСТАТИЧЕСКИЙ ВКЛЮЧАТЕЛЬ | 2018 |
|
RU2691158C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕССОВКИ КОЛОННЫ СКВАЖИНЫ НА ПРИТОК ЖИДКОСТИ | 2005 |
|
RU2285111C1 |
| СПОСОБ КОНТРОЛЯ УСТАНОВКИ ЭЛЕКТРОУПРАВЛЯЕМОГО ПАКЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280148C2 |
Изобретение относится к электротехнике, к устройствам для отработки кнопочных пультов, эксплуатируемых в водной среде с внешней стороны обитаемых подводных объектов. Глубоководный электромеханический исполнительный механизм содержит магнитный корпус, в котором расположена создающая магнитный поток, по крайней мере, одна обмотка с магнитным якорем, поджатым возвратной пружиной. Механизм снабжен герметично установленной с торца корпуса со стороны выдвигаемого конца каждого якоря эластичной манжетой, расположенной в непосредственной близости от каждого якоря и отделяющей внутренний объем корпуса, полностью заполненный диэлектрической жидкостью, от внешней среды. Корпус выполнен герметичным и оснащен изолированными от него токовыводами, а якорь снабжен центральным подвижным штоком с фланцами на концах, поджатым пружиной в направлении рабочего перемещения якоря. Технический результат - обеспечение надежности работы механизма при значительном внешнем гидростатическом давлении воды без ограничений ее электропроводности и глубины погружения. 5 з.п. ф-лы, 2 ил.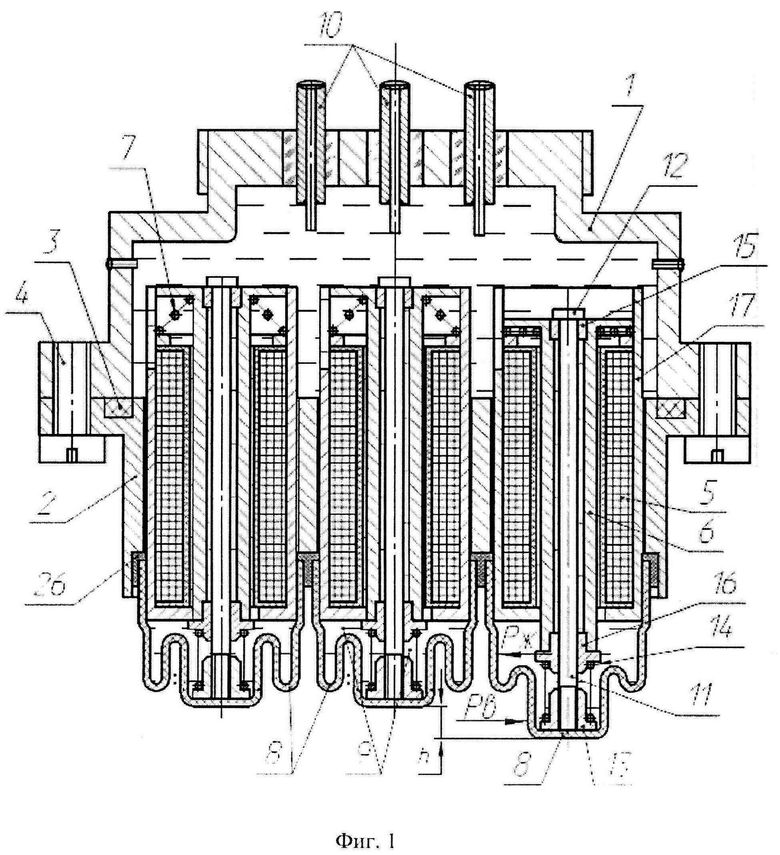
1. Глубоководный электромеханический исполнительный механизм, включающий магнитный корпус, в котором расположена создающая магнитный поток, по крайней мере, одна обмотка с магнитным якорем, поджатым возвратной пружиной, отличающийся тем, что он снабжен герметично установленной с торца корпуса со стороны выдвигаемого конца якоря эластичной манжетой, расположенной в непосредственной близости от якоря и отделяющей внутренний объем корпуса, полностью заполненный диэлектрической жидкостью, от внешней среды, при этом корпус выполнен герметичным и оснащен изолированными от него токовыводами, а якорь снабжен центральным подвижным штоком с фланцами на концах, поджатым пружиной в направлении рабочего перемещения якоря.
2. Глубоководный электромеханический исполнительный механизм по п. 1, отличающийся тем, что фланец штока со стороны манжеты установлен с возможностью изменения осевого положения.
3. Глубоководный электромеханический исполнительный механизм по любому из пп. 1, 2, отличающийся тем, что внутренние объемы с торцов обмотки выполнены сообщающимися.
4. Глубоководный электромеханический исполнительный механизм по любому из пп. 1-3, отличающийся тем, что якорь с обоих торцов снабжен втулками из антифрикционного материала.
5. Глубоководный электромеханический исполнительный механизм по любому из пп. 1-4, отличающийся тем, что он оснащен закрепленной на корпусе в зоне токовыводов гибкой герметичной оболочкой, внутренний объем которой полностью заполнен диэлектрической жидкостью.
6. Глубоководный электромеханический исполнительный механизм по любому из пп. 1-5, отличающийся тем, что диэлектрическая жидкость имеет диапазон рабочих температур, превышающий диапазон температур эксплуатации механизма.
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2694811C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2700666C1 |
| УСТАНОВКА НАСОСНАЯ ПЛУНЖЕРНАЯ ПОГРУЖНАЯ И ЕЕ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2422676C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| Электромеханический привод для скважинных приборов | 1987 |
|
SU1446286A2 |
| Электромеханический привод прижимных устройств скважинных приборов | 1976 |
|
SU692990A1 |
| Скважинное фиксирующее устройство | 1982 |
|
SU1035208A1 |
| Погружной плунжерный электронасос | 1971 |
|
SU521396A1 |
| WO 2016032690 A1, 03.03.2016. | |||

