Область техники
[0001] Изобретение относится к комплексу устройств, используемых при строительстве, и способу его реализации, в том числе с возможностью осуществления автоматизированного монтажа. В частности, относится к системам автоматизированного монтажа силовой конструкции гравитационного накопителя энергии.
Уровень техники
[0002] Гравитационные системы накопления энергии используют перепад высот (гравитационное поле) для накопления энергии. В таких системах грузы – жидкость или твёрдые грузы – перемещаются вверх против силы тяжести при аккумулировании (накоплении) энергии (система заряжается) и грузы возвращаются вниз в начальную позицию при генерации энергии (система разряжается). Системы, которые запасают энергию с помощью строго вертикального перемещения грузов, как известно, наиболее эффективны с точки зрения КПД и минимизации занимаемой площади.
[0003] Например, известна система накопления электрической энергии RU 2699855, включающая в себя по меньшей мере одну энергетическую ячейку. Энергетическая ячейка содержит множество грузов, каретку, тележку, канат и главный привод. Система выполнена с возможностью вертикального перемещения грузов и закрепления грузов в энергетической ячейке либо в верхнем положении, либо в нижнем положении. Система заряжается при перемещении по крайней мере одного груза из множества грузов из нижнего положения в верхнее положение. Система разряжается при перемещении по крайней мере одного груза из множества грузов из верхнего положения в нижнее положение. Указанное изобретение также описывает способ накопления электрической энергии.
[0004] Необходимым условием функционирования гравитационных систем накопления энергии, запасающих энергию с помощью вертикального перемещения грузов, является возможность хранения грузов по меньшей мере в двух положениях: в нижнем положении с минимумом потенциальной энергии и в верхнем положении с максимумом потенциальной энергии. Другими словами, функционирование гравитационных систем накопления энергии предполагает наличие естественной или искусственно созданной разницы высот.
[0005] Естественный ландшафт не часто располагает необходимой разницей высот, достаточной для создания гравитационной системы накопления энергии необходимой энергетической ёмкости, поэтому гравитационные системы накопления энергии как правило имеют специально возводимую несущую конструкцию, обеспечивающую надлежащую разновысотность для накопления энергии.
[0006] Характерная энергетическая ёмкость систем промышленного накопления энергии составляет до десятков гигаватт-часов. Для достижения такой энергетической ёмкости в гравитационной системе накопления энергии, запасающей энергию с помощью вертикального перемещения грузов, высота и горизонтальные размеры (диаметр) такой системы могут достигать нескольких сотен метров, что предъявляет особенные требования к её силовой конструкции.
[0007] Несущая конструкция гравитационной системы накопления энергии включает в себя силовой каркас (силовую конструкцию), выдерживающую вертикальную (сжимающую) нагрузку от грузов. Силовая конструкция гравитационной системы накопления энергии, в которой грузы перемещаются вертикально, также обеспечивает свободное вертикальное перемещение грузов для накопления энергии, иными словами, это означает, что в силовой конструкции таких гравитационных систем накопления энергии нет сплошных горизонтальных перекрытий.
[0008] Известна несущая конструкция гравитационной системы накопления энергии по патенту на изобретение №RU2743988C1 (заявка: RU2019128570, дата публикации: 01.03.2021 г., МПК: E04B 1/18, E04B 1/20), включающая в себя силовой каркас и внешнее ограждение. Силовой каркас включает в себя верхнюю раму, множество модулей, каждый из которых состоит из множества колонн и связей. По меньшей мере одна связь из множества связей жёстко прикрепляется к по меньшей мере одной из колонн. Внешнее ограждение может быть выполнено в виде жёсткой структуры, расположенной на небольшом расстоянии от силового каркаса. Несущая конструкция позволяет создать разность высот между верхним и нижним положением грузов, достаточную для накопления энергии. Силовой каркас указанной конструкции не имеет сплошных горизонтальных перекрытий и обеспечивает беспрепятственное вертикальное перемещение грузов.
[0009] Известно, что автоматизация процесса строительства позволяет кратно уменьшить влияние человеческого фактора, а значит позволяет поднять производительность труда и безопасность при проведении строительных работ. Таким образом, если возведение силовой конструкции гравитационной системы накопления энергии проводится автоматизированными способами, это снижает стоимость строительных работ и риск ошибок.
[00010] Известна временная система для автоматизации строительства и способ строительства на её основе из публикации №KR100980806B1 (заявка: KR200800626110А, дата публикации: 10.09.2010 г., МПК: B66C23/208; B66C23/26; B66C2700/012), позволяющий реализовать автоматизированное строительство с помощью роботизированных средств. Временная система автоматизированного возведения в соответствии с указанным изобретением опирается на предварительно построенную с помощью башенного крана центральную часть (ядро) здания, при этом башенный кран расположен в центре ядра и используется совместно с временной системой автоматизированного возведения, а также для демонтажа временной системы после окончания строительства. На внешней части ядра здания размещается множество вертикальных направляющих, на которых размещается опорная рама временной системы. К опорной раме крепятся горизонтальные рельсы, по которым могут перемещаться строительные роботы, размещающие элементы силовой конструкции в проектное положение. Строительные роботы сконфигурированы таким образом, чтобы их можно было свободно перемещать в любой угол строящейся части здания.
[00011] Недостатками указанной системы является высокая металлоёмкость (а значит дороговизна) опорной рамы, необходимость возведения центральной части здания обычными строительными методами, ограниченность горизонтальных габаритов (диаметра) возводимого сооружения габаритами опорной рамы и длиной стрелы башенного крана.
[00012] Известен автоматизированный способ возведения зданий из промышленных блоков по патенту на изобретение №RU2606886С1 (заявка: 2015153668, дата публикации: 10.01.2017 г., МПК: Е04G 21/14). Изобретение относится к автоматизированному строительству промышленных и гражданских зданий и сооружений. Технический результат: повышение уровня автоматизации при возведении зданий и сооружений с обеспечением при этом технологии строительства и требуемых технических характеристик зданий и сооружений. В автоматизированном способе возведения зданий из строительных блоков предварительно формируют проект здания, в соответствии с которым в компьютерной программе формируют последовательность действий и координаты расположения для каждого строительного блока, арматурной ленты и связующего состава. Блоки, связующий состав, арматурные ленты подвозят на строительную площадку, располагают на площадке в местах, соответствующих алгоритму компьютерной программы, заложенной в управляющий модуль. Далее подготавливают роботизированным комплексом, расположенным на рельсах, строительные блоки, связующий состав и арматурные ленты и подают их на транспортерную тележку с регулируемой по высоте площадкой, которую электроприводом передвигают на рельсах, которые располагают вдоль других рельсов, уложенных с двух сторон строящегося здания. По другим рельсам передвигают кран-балку, балку которой перемещают вверх по мере роста стен, а по балке передвигают тележку с двумя роботизированными манипуляторами, один из которых смазывает через сопло связующим составом прилегающие поверхности блоков, а второй захватывает подготовленные блоки и арматурные ленты с тележки и укладывает их в стены и перегородки здания. При этом управляют манипуляторами, передвигают их по балке, передвигают кран-балку по рельсам, передвигают балку вверх-вниз, передвигают тележки, подготавливают связующий состав, блоки и арматурные ленты, подают их к манипулятору тележкой электроприводами по алгоритму компьютерной программы, заложенной в управляющий модуль.
[00013] Основным недостатком указанного способа является ограничение горизонтальных габаритов здания длиной балки, примерно равной расстоянию между рельсами, расположенных по двум сторонам от строящегося здания.
[00014] Известен способ возведения сооружений методом подъёма этажей (например, «Рекомендации по возведению многоэтажных зданий методом подъёма этажей и перекрытий», Издательство литературы по строительству, Москва, 1971 г.), в котором возведение многоэтажных зданий проводится путём постепенного подъёма изготовленных на уровне земли железобетонных этажей на заданную проектом высоту с помощью комплекта подъёмников (домкратов), объединённых в синхронно работающую систему. Вначале осуществляют подъём плиты чердачного перекрытия со смонтированной на ней кровлей. Затем на уровне земли проводят монтаж элементов этажа: ограждающих и внутренних стеновых конструкций, лестничных маршей и площадок, санузлов, коммуникаций и др. Готовый к подъёму этаж домкратами поднимают на соответствующую отметку и закрепляют на ней. В той же последовательности осуществляют и монтаж очередного этажа. Преимуществами метода являются: возможность строительства без применения башенных кранов, возможность строительства в стесненных условиях, уменьшение сроков строительства, снижение трудоемкости строительства.
[00015] Основным недостатком традиционного метода подъёма этажей и перекрытий является ограничение высоты зданий в 20-30 метров и горизонтальных габаритов здания в 30-40 метров.
[00016] Известен способ строительства самоподъёмных сооружений, при котором здания возводятся сверху вниз из публикации заявки на получение патента на изобретение №CN1155029А (заявка: CN96119160A, дата публикации: 23.07.1997 г., МПК: Е04B1/3511), заключающийся в использовании в качестве опорных колонн полых стальных колонн, внутри которых могут быть размещены домкраты. Каждый этаж монтируется внизу, затем всё построенное здание поднимается с помощью домкратов так, что формируется пространство для монтажа следующего этажа на уровне земли. Способ позволяет сократить сроки строительства, повысить безопасность работ, и может быть использован для возведения высотных сооружений, бесколонных зданий большой площади, большепролетных мостов и др.
[00017] Недостатком указанного способа является сложность соблюдения вертикальности высотного сооружения в процессе его подъёма, даже при небольшой неравномерности подъёма может произойти значительное отклонение центра тяжести здания по горизонтали, произойти опрокидыванию и разрушение здания. Другой недостаток состоит в том, что способ не предполагает отказа от ручного труда при сборке этажей, что не исключает риск ошибок.
[00018] Соответственно, существует необходимость в способе автоматизированного монтажа силовой конструкции гравитационного накопителя энергии, обеспечивающем возведение указанной силовой конструкции без присутствия человека в зоне монтажа, возведение силовой конструкции достаточных габаритов. Кроме того, необходимо, чтобы комплекс устройств для реализации указанного способа обеспечивал достаточно высокую производительность для обеспечения быстроты монтажа, а также не предполагал создание массивных временных конструкций, которые приводят к удорожанию строительства.
[00019] Возводимая силовая конструкция гравитационного накопителя энергии представляет собой каркас из колонн и связей, которые не имеют горизонтальных перекрытий, тем самым силовая конструкция обеспечивает возможность беспрепятственного вертикального перемещения грузов.
Раскрытие сущности изобретения
[00020] Технический результат заявленного изобретения заключается в возможности автоматизированного монтажа силовой конструкции гравитационного накопителя энергии с минимизацией участия человека в процессе монтажных работ внутри контура возводимой конструкции.
[00021] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии, включает, по меньшей мере: один манипулятор-домкрат, манипулятор-монтажник и манипулятор-подъёмник, размещенные на силовой раме силовой конструкции. При этом манипулятор-домкрат включает крестообразную опорную раму, механизм подъёма и механизм сдвига для обеспечения возможности как вертикального подъёма силовой рамы, так и её горизонтального позиционирования в двух взаимно перпендикулярных направлениях. Манипулятор-монтажник предназначен для установки элементов силовой конструкции на новом ярусе непосредственно под силовой рамой, и включает шасси для перемещения по горизонтали вдоль силовой рамы. Манипулятор-транспортер предназначен для перемещения по строительной площадке на нижнем уровне и обеспечения доставки элементов силовой конструкции со склада в зону подъёма манипулятором-подъёмником. Манипулятор-подъёмник предназначен для вертикальной доставки элементов силовой конструкции от манипулятора-транспортёра к манипулятору-монтажнику и включает канат для подъёма элементов силовой конструкции и по меньшей мере один барабан для наматывания каната, шасси для горизонтального перемещения по силовой раме.
[00022] В преимущественном варианте заявленного изобретения элементы силовой конструкции перемещаются манипулятором-транспортёром и манипулятором-подъёмником с использованием по меньшей мере двух транспортно-перегрузочных контейнеров.
[00023] Механизм подъёма и механизм сдвига могут включать систему гидроцилиндров.
[00024] Манипулятор-монтажник может быть выполнен с возможностью перемещения по горизонтали вдоль верхней силовой рамы по направляющим силовой рамы, и может включать в себя датчики для позиционирования элементов силовой конструкции.
[00025] В развитие заявленного изобретения электроснабжение манипулятора-подъёмника, манипулятора-монтажника и манипулятора-домкрата реализовано при помощи проводного соединения с источником питания. При этом источники питания могут быть размещены на уровне силовой рамы.
[00026] В развитие заявленного изобретения выполнение электроснабжения манипулятора-транспортёра является автономным. При этом автономным источником питания может служить аккумуляторная батарея.
[00027] В развитие заявленного изобретения по крайней мере один манипулятор содержит устройство приема-передачи данных.
[00028] В развитие заявленного изобретения по крайней мере один манипулятор содержит систему технического зрения.
[00029] В развитие заявленного изобретения по крайней мере один манипулятор содержит блок автоматизированной системы управления.
[00030] Технический результат достигается с применением способа автоматизированного монтажа силовой конструкции гравитационного накопителя энергии с использованием комплекса автоматизированного монтажа, включающим следующую последовательность действий: осуществляют монтаж первого яруса силовой конструкции с установкой силовой рамы на первый ярус стандартными строительными средствами. На силовой раме размещают по меньшей мере по одному манипулятору-домкрату, манипулятору-монтажнику и манипулятору-подъёмнику. затем осуществляют подъём силовой рамы манипулятором-домкратом на высоту достаточную для установки нового яруса силового каркаса между имеющимся ярусом и силовой рамой. С помощью манипулятора-транспортёра доставляют со склада колонны силового каркаса в зону подъёма, а с помощью манипулятора-подъёмника их поднимают на уровень монтажа. После чего формируют непосредственно под силовой рамой новый ярус конструкции, устанавливая каждую колонну в проектное положение с помощью манипулятора-монтажника, при этом манипулятор-подъёмник перемещается по силовой раме силовой конструкции так, что подъём колонн осуществляется рядом с уже смонтированным участком. С помощью механизма сдвига манипулятора-домкрата и крестообразной опорной рамы манипулятора-домкрата перемещают силовую раму в двух горизонтальных координатах для обеспечения соблюдения вертикальности каждого ряда колонн. Затем с помощью манипулятора-транспортёра доставляют со склада связи силового каркаса в зону подъёма и поднимают их на уровень монтажа с помощью манипулятора-подъёмника. Устанавливают каждую связь в проектное положение с помощью манипулятора-монтажника, фиксируя каждую колонну в проектном положении и завершая формирование нового яруса силовой конструкции, затем переносят вес силовой рамы с манипулятора-домкрата на установленный ярус колонн с помощью манипулятора-домкрата. При этом манипулятор-подъёмник перемещается по силовой раме силовой конструкции так, что подъём связей осуществляется рядом с уже смонтированным участком. Переносят вес манипулятора-домкрата на силовую раму и затем перемещают крестообразную опорную раму манипулятора-домкрата на один ярус выше с помощью манипулятора-домкрата. Операции по подъёму силовой рамы и формированию нового яруса силовой конструкции повторяют необходимое число раз.
[00031] Возможно достижение заявленного результата способом автоматизированного монтажа силовой конструкции гравитационного накопителя энергии с использованием комплекса автоматизированного монтажа, в котором переустановка манипулятора-домкрата в стартовое положение осуществляется самим манипулятором-домкратом с помощью гидравлического механизма.
Краткое описание чертежей
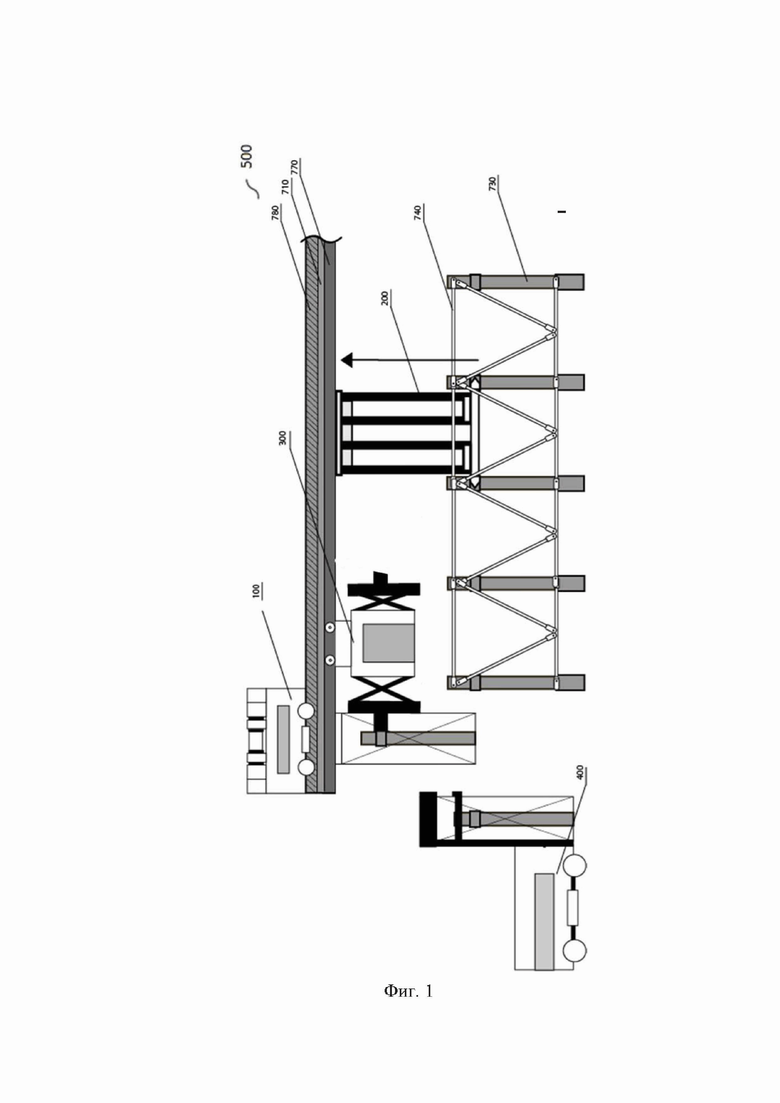
[00032] На фигуре 1 изображен комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии.
[00033] На фиг. 1 приняты следующие обозначения:
100 - манипулятор-подъёмник;
200 - манипулятор-домкрат;
300 – манипулятор-монтажник;
400 – манипулятор-транспортёр;
500 – комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии;
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь;
770 – горизонтальные направляющие для перемещения манипулятора-монтажника;
780 - горизонтальные направляющие для перемещения манипулятора-подъёмника.
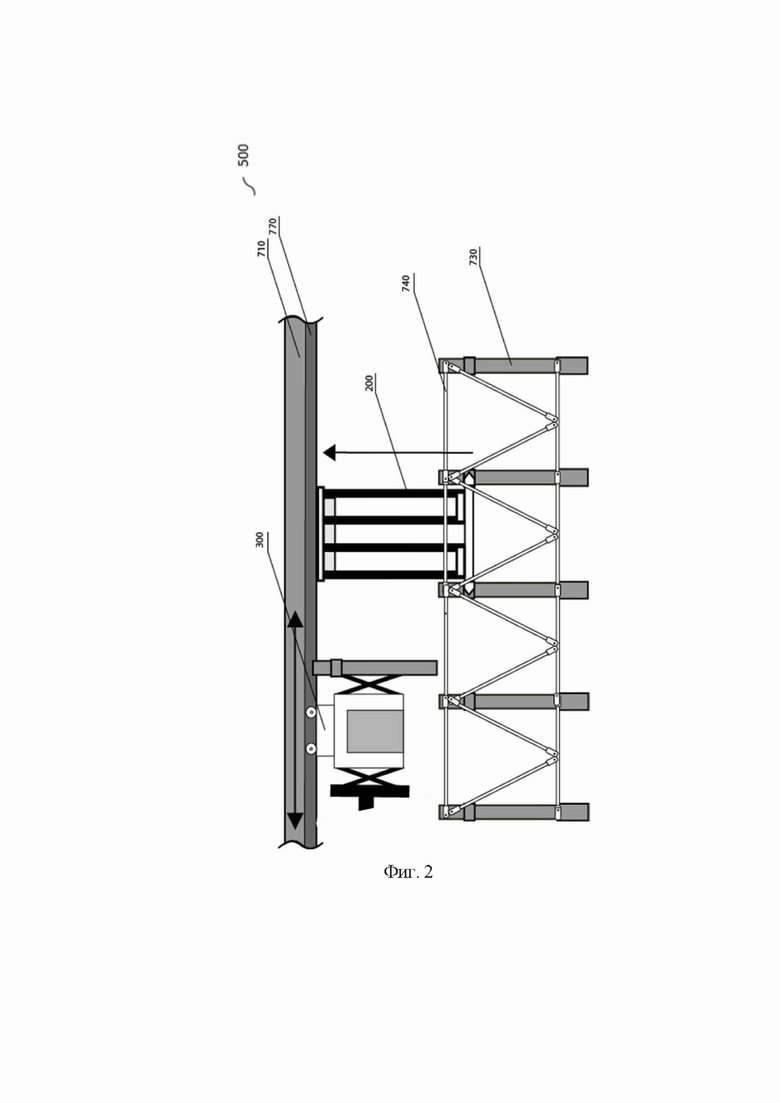
[00034] На фигуре 2 изображен комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии с манипулятором-монтажником и манипулятором-домкратом.
[00035] На фиг. 2 приняты следующие обозначения:
200 – манипулятор-домкрат;
300 – манипулятор-монтажник;
500 – комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии;
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь;
770 – горизонтальные направляющие для перемещения манипулятора-монтажника.
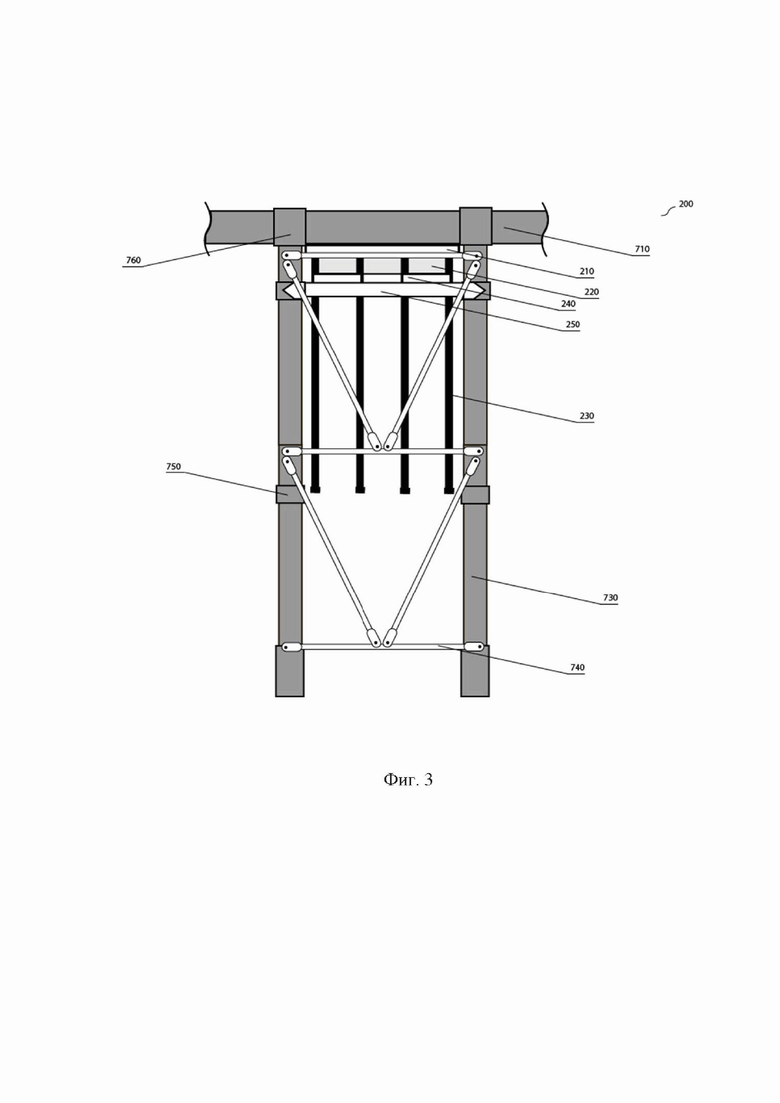
[00036] На фигуре 3 изображен манипулятор-домкрат в стартовом положении.
[00037] На фиг. 3 приняты следующие обозначения:
200 – манипулятор-домкрат;
230 – вертикальные направляющие;
240 – механизм подъёма;
250 – крестообразная опорная рама
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь;
750 – опорный участок колонны;
760 - опорный участок несущей рамы силового каркаса.
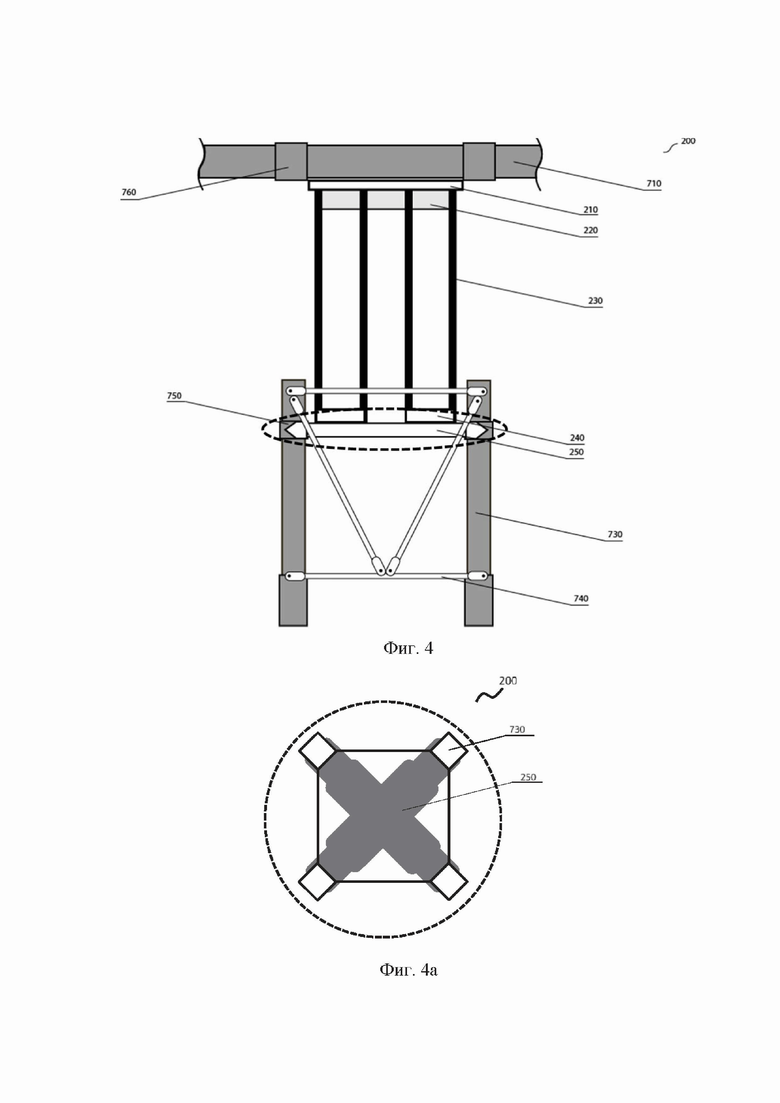
[00038] На фигуре 4 изображен манипулятор-домкрат, осуществивший подъём силовой рамы для монтажа нового яруса конструкции.
[00039] На фиг. 4 приняты следующие обозначения:
200 – манипулятор-домкрат;
210 – механизм сдвига силовой рамы;
220 – блок автоматизированной системы управления (АСУ) манипулятора-домкрата;
230 – вертикальные направляющие;
240 – механизм подъёма;
250 – крестообразная опорная рама;
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь;
750 – опорный участок колонны;
760 - опорный участок несущей рамы силового каркаса.
[00040] На фигуре 4а показана крестообразная опорная рама манипулятора-домкрата.
[00041] На фиг. 4а приняты следующие обозначения:
200 – манипулятор-домкрат;
250 - крестообразная опорная рама;
730 - несущая колонна.
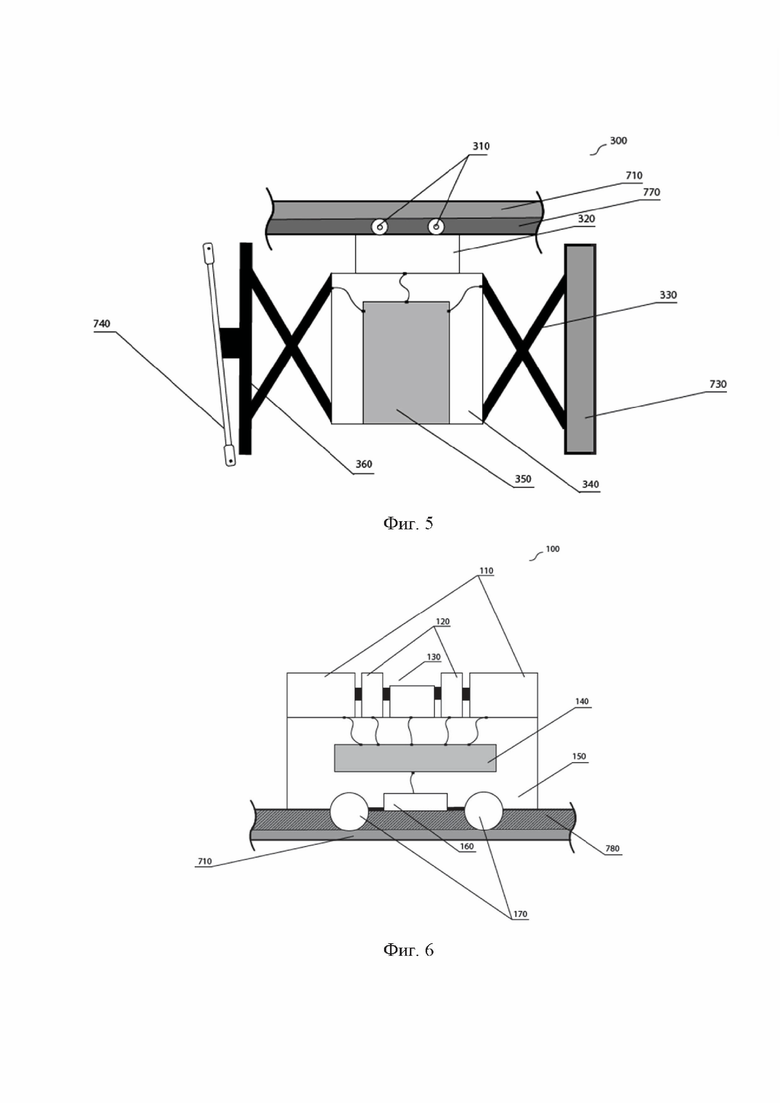
[00042] На фигуре 5 изображен манипулятор-монтажник, обеспечивающий все технологические перемещения и операции, необходимые для непосредственного монтажа конструктивных элементов силовой конструкции гравитационного накопителя энергии.
[00043] На фиг. 5 приняты следующие обозначения:
300 – манипулятор-монтажник;
310 – подвижное шасси манипулятора-монтажника;
320 – опорно-поворотное устройство;
330 – механизм установки колонны;
340 – поворотная рама;
350 – блок автоматизированной системы управления (АСУ) манипулятора-монтажника;
360 – механизм установки связи;
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь;
770 - горизонтальные направляющие для перемещения манипулятора-монтажника.
[00044] На фигуре 6 изображен манипулятор-подъёмник с двумя барабанами предназначенный для доставки строительных компонентов сборной силовой конструкции гравитационного накопителя энергии - несущих колонн и связей между ними, от уровня работы манипулятора-транспортера на уровень работы манипулятора–монтажника.
[00045] На фиг. 6 приняты следующие обозначения:
100 – манипулятор-подъёмник;
110 – барабан манипулятора-подъёмника;
120 – редуктор манипулятора-подъёмника;
130 – тяговый двигатель манипулятора-подъёмника;
140 – блок автоматизированной системы управления (АСУ) манипулятора-подъёмника
150 – рама манипулятора-подъёмника;
160 – ходовой двигатель манипулятора-подъёмника;
170 – подвижное шасси манипулятора-подъёмника;
710 – верхняя силовая рама;
780 - горизонтальные направляющие для перемещения манипулятора-подъёмника.
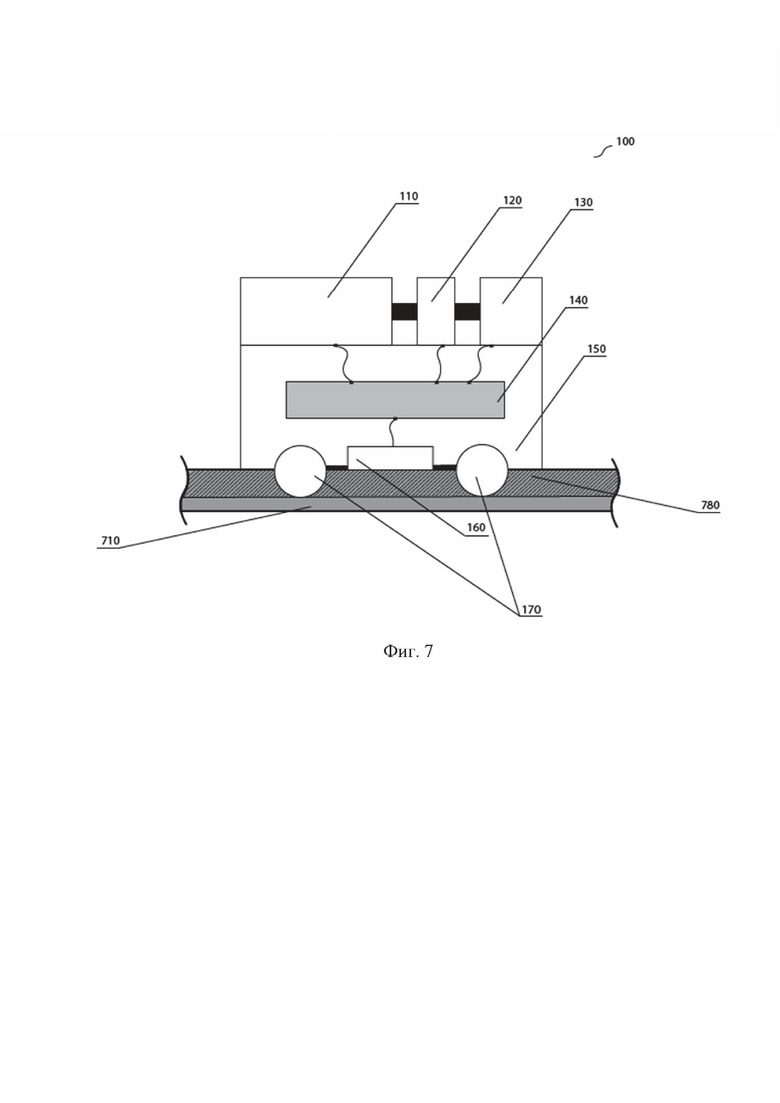
[00046] На фигуре 7 изображен манипулятор-подъёмник с одним барабаном.
[00047] На фиг.7 приняты следующие обозначения:
100 – манипулятор-подъёмник;
110 – барабан манипулятора-подъёмника;
120 – редуктор манипулятора-подъёмника;
130 – тяговый двигатель манипулятора-подъёмника;
140 – блок автоматизированной системы управления (АСУ) манипулятора-подъёмника
150 – рама манипулятора-подъёмника;
160 – ходовой двигатель манипулятора-подъёмника;
170 – подвижное шасси манипулятора-подъёмника;
710 – верхняя силовая рама;
780 - горизонтальные направляющие для перемещения манипулятора-подъёмника.
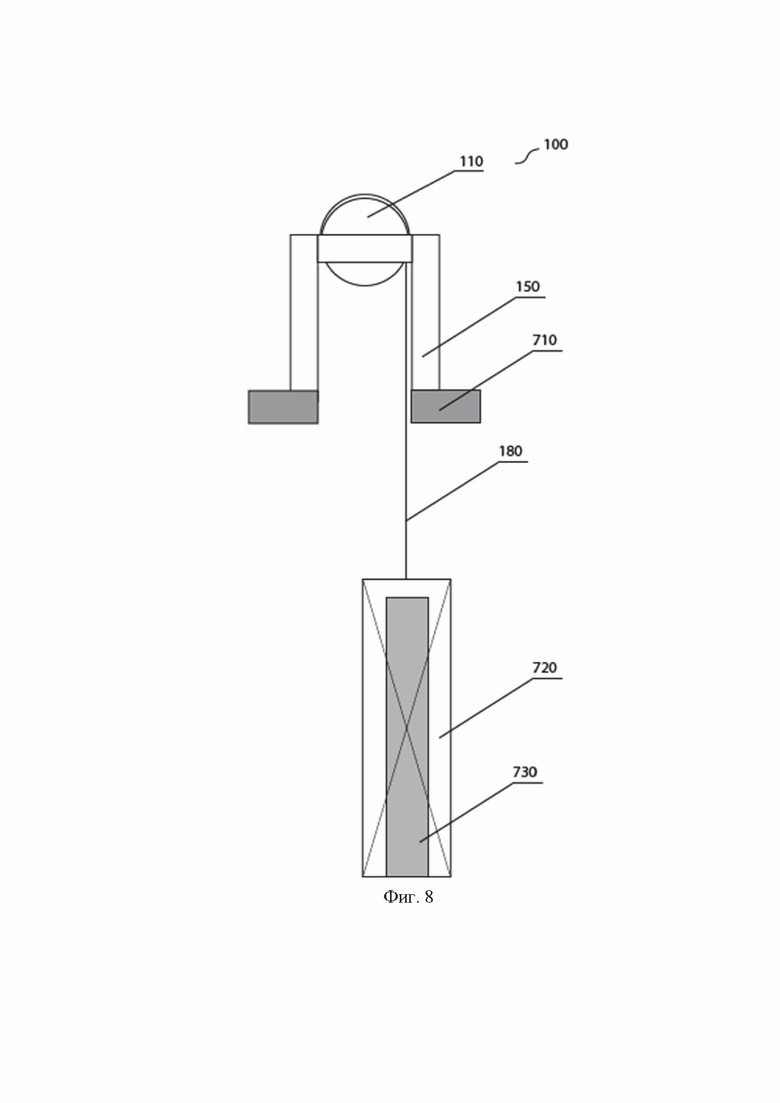
[00048] На фигуре 8 изображен вид с боку на манипулятор-подъёмник, осуществляющий подъём транспортно-перегрузочного контейнера с колонной.
[00049] На фиг. 8 приняты следующие обозначения:
100 – манипулятор-подъёмник;
110 – барабан манипулятора-подъёмника;
150 – рама манипулятора-подъёмника;
170 – подвижное шасси манипулятора-подъёмника;
180 – канат;
720 – транспортно-перегрузочный контейнер (ТПК);
730 - несущая колонна.
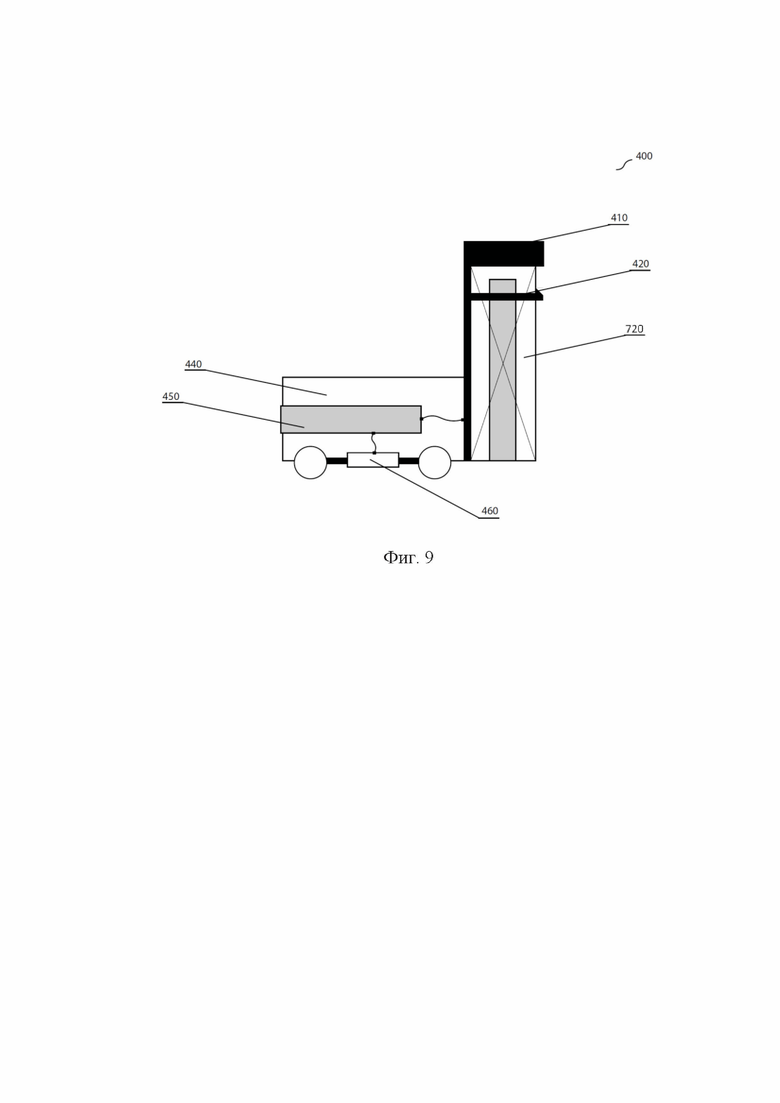
[00050] На фигуре 9 изображен манипулятор-транспортёр, осуществляющий транспортировку транспортно-перегрузочного контейнера с колонной.
[00051] На фиг. 9 приняты следующие обозначения:
400 – манипулятор-транспортёр
410 – механизм смены ТПК;
420 – механизм захвата ТПК;
440 – подвижное шасси манипулятора-транспортёра;
450 – блок автоматизированной системы управления (АСУ) манипулятора-транспортёра;
460 – ходовой двигатель манипулятора-транспортёра;
720 - транспортно-перегрузочный контейнер (ТПК).
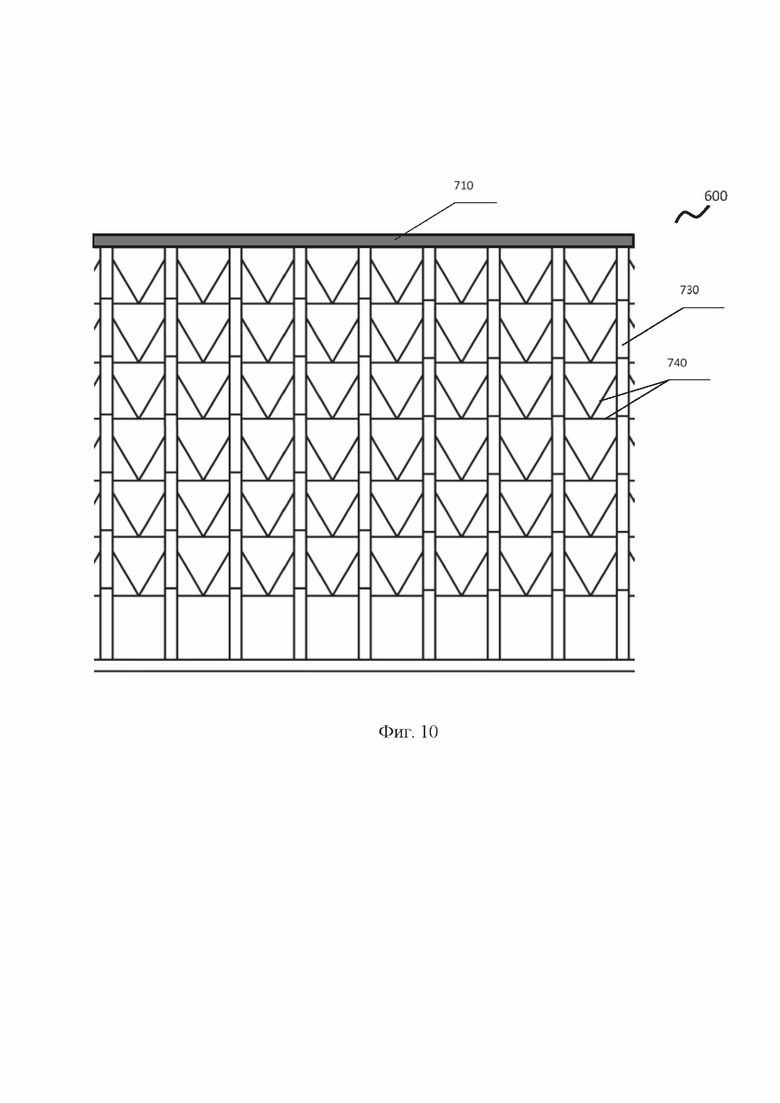
[00052] На фигуре 10 изображена силовая конструкция гравитационного накопителя энергии с силовой рамой.
[00053] На фиг. 10 приняты следующие обозначения:
600 – силовая конструкция гравитационного накопителя энергии;
710 – верхняя силовая рама;
730 – несущая колонна;
740 – связь.
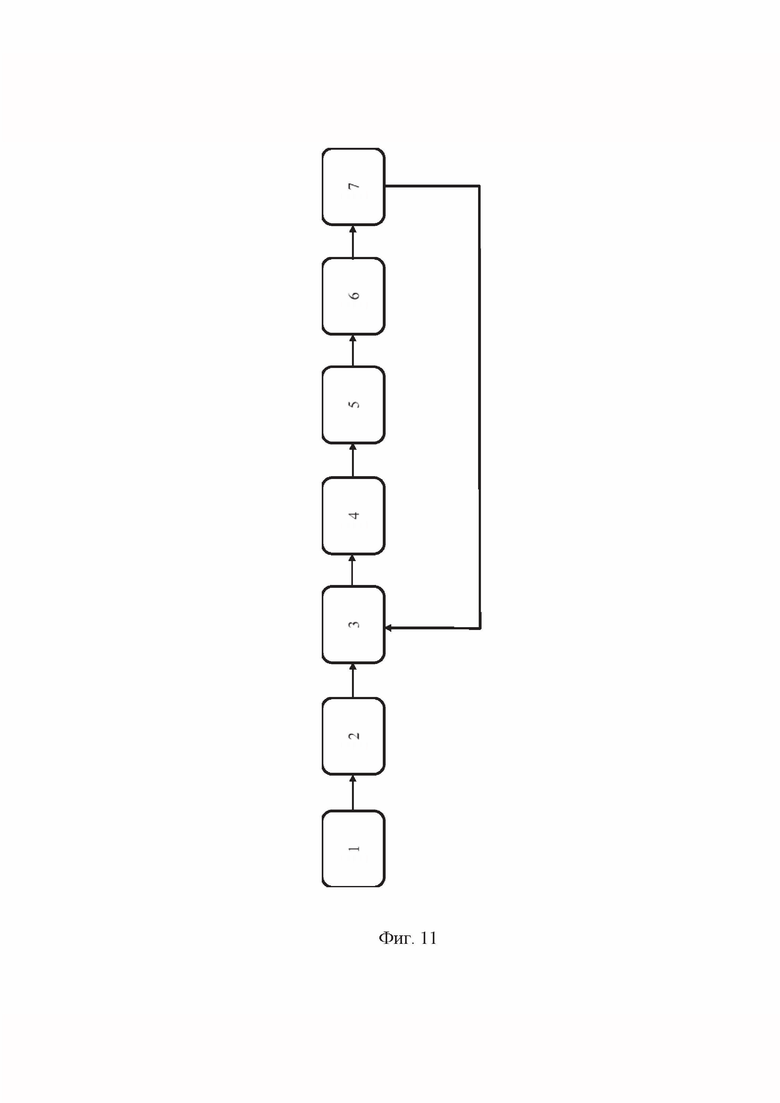
[00054] На фигуре 11 изображена блок-схема реализации способа автоматизированного монтажа силовой конструкции гравитационного накопителя энергии.
[00055] На фиг. 11 приняты следующие обозначения:
1 Монтаж первого яруса силовой конструкции (стандартными строительными средствами) и размещение силовой рамы силовой конструкции;
2 Установка на силовую раму манипулятора-домкрата, манипулятора-подъёмника и манипулятора-монтажника.
3 Подъём силовой рамы манипулятором-домкратом.
4 Установка колонн нового яруса с участием манипулятора-транспортёра, манипулятора-подъёмника и манипулятора-монтажника.
5 Горизонтальное двухкоординатное позиционирование верхней силовой рамы манипулятором-домкратом.
6 Установка связей нового яруса с участием манипулятора-транспортёра, манипулятора-подъёмника и манипулятора-монтажника.
7 Переустановка манипулятора-домкрата в стартовое положение для возведения нового яруса силовой конструкции системы накопления энергии.
Осуществление изобретения
[00056] Осуществление заявленного изобретения не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, очевидны для квалифицированных в предметной области специалистов.
[00057] На фигуре 1 изображен комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2). Монтаж силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) осуществляют с использованием манипуляторов: манипуляторов-домкратов 200 (фиг. 1, 6, 3, 4, 4а), манипуляторов-монтажников 300 (фиг. 1, 2, 5), манипуляторов-подъёмников 100 (фиг. 1, 6, 7, 8) и манипуляторов-транспортёров 400 (фиг. 1, 9). Манипулятор-домкрат 200 (фиг. 1, 6, 3, 4, 4а) обеспечивает поднятие силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) над возводимым ярусом силовой конструкции, манипулятор-монтажник 300 осуществляет монтаж и установку элементов силовой конструкции: несущей рамы 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связи 740 (фиг. 1, 2, 3, 4, 5, 10), перемещаясь горизонтально вдоль силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10), по направляющей 770 (фиг. 1, 2, 5), манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) обеспечивает доставку элементов силовой конструкции 730 (фиг. 1, 2, 3, 4, 5, 6, 10) и 740 (1, 2, 3, 4, 5, 10) к манипулятору-монтажнику 300 (фиг. 1, 2, 5), перемещаясь горизонтально вдоль верхней силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) и поднимая элементы силовой конструкции: несущей рамы 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связи 740 (фиг. 1, 2, 3, 4, 5, 10), в транспортно-перегрузочном контейнере 720 (фиг. 8, 9) и манипулятор-транспортёр 400 (фиг. 1, 9) обеспечивает транспортировку элементов силовой конструкции: несущей рамы 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связи 740 (фиг. 1, 2, 3, 4, 5, 10), со склада (не показан) в транспортно-перегрузочном контейнере 720 (фиг. 8, 9) к манипулятору-подъёмнику 100 (фиг. 1, 6, 7, 8)
[00058] На фигуре 2 изображен комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2), в котором манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) осуществил подъём силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) силовой конструкции над уровнем монтажа, а манипулятор-монтажник 300 (фиг. 1, 2, 5) осуществляет установку колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) в проектное положение.
[00059] На фигуре 3 изображен манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а), обеспечивающий подъём силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на высоту, необходимую для монтажа очередного уровня колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей 740 (фиг. 1, 2, 3, 4, 5, 10). Манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) показан на фигуре 3 в стартовом положении: монтаж предыдущего уровня силового каркаса, состоящего из колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей 740 (фиг. 1, 2, 3, 4, 5, 10) завершён, Манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) осуществил перемещение крестообразной опорной рамы 250 (фиг. 3, 4, 4а) на опорные участки 750 (фиг. 3, 4) колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) возведённого уровня и готов к началу подъёма силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на высоту, необходимую для монтажа очередного уровня. Манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) включает в себя следующие узлы: Механизм сдвига 210 (фиг. 4), вертикальные направляющие 230 (фиг. 3, 4), блок автоматизированной системы управления (АСУ) манипулятора-домкрата 220 (фиг. 4), механизм подъёма 240 (фиг. 3, 4), крестообразная опорная рама 250 (фиг. 3, 4, 4а). механизмы сдвига 210 (фиг. 4), подъёма 230 (фиг. 3, 4) могут быть реализованы, например, с помощью системы гидроцилиндров. Крестообразная опорная рама 250 (фиг. 3, 4, 4а) может иметь вдвигающиеся и выдвигающиеся при помощи гидравлических устройств опорные лапы, при этом опорные лапы крестообразной опорной рамы 250 (фиг. 3, 4, 4а) манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) захватывают колонну 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) в опорных участках 750 колонны (фиг. 3, 4)
[00060] На фигуре 4 изображен манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) в положении удержания силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на верхнем уровне над уровнем монтажа, обеспечив возможность установки элементов нового уровня силового каркаса между уже возведённым уровнем и силовой рамой 710 (фиг. 1, 2, 3, 4, 5, 6, 10). После установки всех колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) нового уровня силовой конструкции манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) с помощью механизма сдвига 210 (фиг. 4) и крестообразной опорной рамы 250 (фиг. 3, 4, 4а) обеспечивает необходимое двухкоординатное горизонтальное перемещение поднятой силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) в плане для корректировки погрешностей позиционирования рамы 250 (фиг. 3, 4, 4а), возникающих в результате упругой деформации собственных звеньев манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а); затем манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) обеспечивает собственную переустановку на последний возведённый уровень каркаса в стартовой положение.
[00061] На фигуре 5 показана конструкция манипулятора-монтажника 300 (фиг. 1, 2, 5), который предназначен для автоматизации монтажа несущих колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей (горизонтальных и наклонных) 740 (фиг. 1, 2, 3, 4, 5, 10) между ними. Функционально манипулятор-монтажник 300 (фиг. 1, 2, 5) осуществляет захват элементов силовой конструкции, например, из ТПК 720 (фиг. 8, 9), его доставку до места установки, правильное позиционирование в месте установки и последующую фиксацию. В его состав входят узлы: блок АСУ 350 (фиг. 5); обеспечивающий управление манипулятором-монтажником 300 (фиг. 1, 2, 5), подвижное шасси 310 (фиг. 5), необходимое для перемещения манипулятора-монтажника 300 (фиг. 1, 2, 5) по горизонтальным направляющим 770 (фиг. 1, 2, 5), выполненным в виде путей на силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10); опорно-поворотное устройство 320 (фиг. 5), предназначенное для вращения поворотной рамы 340 (фиг. 5) вокруг вертикальной оси; поворотная рама 340 (фиг. 5), которая несёт вертикальные направляющие 230 (фиг. 3, 4), воспринимающие нагрузки от двух главных механизмов манипулятора-монтажника 300 (фиг. 1, 2, 5): механизма установки колонны 330 (фиг. 5) и механизма установки связи 360 (фиг. Фиг. 5), закрепленных на поворотной раме 340 (фиг. 5) с возможностью вращения в том числе вокруг горизонтальной оси.
[00062] На фигуре 6 показан манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8), предназначенный для доставки элементов силовой конструкции: колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей 740 (фиг. 1, 2, 3, 4, 5, 10), силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2), от уровня работы манипулятора-транспортера 400 (фиг. 1, 9) на уровень работы манипулятора–монтажника 300 (фиг. 1, 2, 5). Функционально манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) осуществляет захват снаряженного транспортно-перегрузочного контейнера (ТПК) 720 (фиг. 8, 9) в точке доставки его манипулятором-транспортером 400 (фиг. 1, 9) при помощи грузозахватного механизма (не показан), опускаемого на канате 180 (фиг. 8). Затем манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) осуществляет подъём ТПК 720 (фиг. 8 9) на уровень работы манипулятора-монтажника 300 (фиг. 1, 2, 5). Манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) включает в себя раму 150 (фиг. 6, 7, 8) – платформу, на которой осуществляется монтаж всех узлов, по меньшей мере один барабан 110 (фиг. 6, 7), предназначенный для намотки каната 180 (фиг. 8), необходимого для поднятия ТПК 720 (фиг. 8, 9) на нужный ярус, по крайней мере один редуктор 120 (фиг. 6, 7, 8), позволяющий преобразовать скорость вращения и момент, создаваемый двигателем 130 (фиг. 6, 7), который может быть выполнен в виде электродвигателя, в скорость и момент необходимые для подъёма снаряженных ТПК 720 (фиг. 8, 9), передавая их на барабан 110 (фиг. 6, 7). Валы редукторов 120 (фиг. 6, 7, 8) приводятся во вращение с помощью тягового двигателя 130 (фиг. 6, 7). Кроме того, конструкция манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8) включает в себя ходовой двигатель 160 (фиг. 6, 7), который может быть выполнен в виде электродвигателя, обеспечивающий перемещение манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8) по верхней силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10), а также блок АСУ 140 (фиг. 6, 7), содержащий необходимые электронные компоненты для управления манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8).
[00063] На фигуре 7 показан манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) с одним барабаном 110 (фиг. 6, 7). На каждый барабан манипулятора приходится один редуктор 120 (фиг. 6, 7, 8).
[00064] На фигуре 8 показан вид манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8), в захвате которого находится транспортно-перегрузочный контейнер (ТПК) 720 (фиг. 8, 9), снаряженный колонной 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10), необходимой для построения силового каркаса.
[00065] На фигуре 9 показан вид манипулятора-транспортёра 400 (фиг. 1, 9), осуществляющего транспортировку колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) в транспортно-перегрузочном контейнере 720 (фиг. 8, 9) со склада (не показан) к месту подъёма манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8). Манипулятор-транспортёр 400 (фиг. 1, 9) включает в себя подвижное шасси 440 (Фиг. 9); блок АСУ 450 (фиг. 9); ходовой двигатель 460 (фиг. 9); устройство захвата ТПК 420 (фиг. 8, 9) и механизм смены ТПК 410 (фиг. 9).
[00066] На фигуре 10 схематически показан возведённый при помощи комплекса 500 (фиг. 1, 2) участок силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) с силовой рамой 710 с элементами силовой конструкции – колоннами 730 и связями 740.
[00067] Манипулятор-домкрат, манипулятор-монтажник, манипулятор-подъёмник размещены на силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) расположена наверху силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) и выполнена с возможностью размещения на ней надстроек и различного оборудования, а так же крыши (на рисунке не показана), при этом крыша обеспечивает защиту силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) и всего комплекса автоматизированного монтажа 500 (фиг. 1, 2) от различных внешних факторов и природных явлений, таких как дождь, снег, гроза, яркое солнце и т.п. Для защиты от перечисленных факторов возведение силовой конструкции 600 (фиг. 10) может производиться внутри возведённого контура внешнего ограждения (не показан), представляющего собой замкнутую стеновую конструкцию, например, цилиндрической формы. Силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) силовой конструкции 600 (фиг. 10) может быть выполнена из металла, например, в виде жёсткой стальной конструкции, и в смонтированном варианте силовой конструкции 600 (фиг. 10) опирается на колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10), которые могут быть выполнены железобетонными. В смонтированном варианте силовой конструкции 600 (фиг. 10) силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может крепиться к колоннам 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) с помощью, например, сварки, болтовых соединений, заклёпок и т.п. Либо так же, как и в процессе монтажа быть закреплённой на колоннах 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) верхнего ряда силовой конструкции 600 (фиг. 10) под действием силы собственного веса, направленной вниз. Силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может быть дополнительно оснащена направляющими 770 (фиг. 1, 2, 5) для горизонтального перемещения манипулятора-монтажника 300 (фиг. 1, 2, 5). Направляющие 770 (фиг. 1, 2, 5) могут быть выполнены в виде рельсов или пазов. Силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может быть дополнительно оснащена направляющими 780 (фиг. 1, 6) для горизонтального перемещения манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8). Направляющие 780 (фиг. 1, 6) также могут быть выполнены в виде рельсов или пазов. Таким образом, исполнение силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) способствует автоматизации монтажа высотной и протяжённой в горизонтальной плоскости конструкции без горизонтальных перекрытий и с минимизацией участия человека в процессе монтажа.
[00068] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) также включает манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а). Манипулятор-домкрат 200
(фиг. 1, 2, 3, 4, 4а) обеспечивает вертикальное перемещение силовой рамы 710
(фиг. 1, 2, 3, 4, 5, 6, 10) для последующего монтажа элементов силовой конструкции. В качестве механизмов подъёма в манипуляторе-домкрате могут быть использованы гидроцилиндры. Манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) опирается на колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) силовой конструкции посредством собственной крестообразной опорной рамы 250 (3, 4, 4а), которая может быть выполнена с четырьмя выдвижными опорными лапами, вставленными в центральную коробчатую раму. В выдвинутом положении концевые опоры лап попадают на опорные участки 750 (фиг. 2, 4) колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). Во втянутом положении опорные лапы входят внутрь центральной коробчатой рамы и оказываются внутри рабочего габарита ячейки, так, что возможно беспрепятственное вертикальное перемещение крестообразной опорной рамы 250 (фиг. 3, 4, 4а) для переустановки на следующий смонтированный ярус. Выдвижение и втягивание каждой лапы производится при помощи отдельного гидроцилиндра. В свою очередь, на крестообразную опорную раму 250 (фиг. 3, 4, 4а) манипулятора-домкрата 200 (1, 2, 3, 4, 4а) опирается механизм подъёма 240 (фиг. 3, 4), который может представлять собой четыре одинаковых реечно-храповых подъёмных механизма. Привод каждого подъёмного механизма производится с помощью группы гидроцилиндров. Механизм подъёма манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) выполняет одновременно две функции. Во-первых, он поднимает силовую раму 710 (фиг. 1, 2, 3, 4, 5, 6, 10) посредством выталкивания вертикальных направляющих 230 (фиг 3, 4) вверх относительно крестообразной опорной рамы 250 (фиг. 3, 4, 4а) манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а). Во-вторых, он же поднимает крестообразную опорную раму 250 (фиг. 3, 4, 4а) манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) после установки колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) нового уровня и упора силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на эти колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) – посредством подъёма самого механизма вместе с прикрепленной к нему крестообразной опорной рамой 250 (фиг. 3, 4, 4а) манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) по вертикальным направляющим 230 (фиг. 3, 4). Подъём на высоту происходит пошагово, с механической фиксацией на каждом шаге с помощью реечно-храпового механизма. Так обеспечивается безопасность подъёма и удерживания силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) в поднятом состоянии в конечных точках и в каждой промежуточной точке всего пути подъёма. Манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) дополнительно оснащен механизмом горизонтального позиционирования 210 (фиг. 4), который предназначен для двухкоординатной горизонтальной коррекции положения силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Таким образом, достигается строгое соблюдение вертикальности монтажа колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и вертикальность конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) в целом. Механизм горизонтального позиционирования 210 (фиг. 4) силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может быть представлен четырьмя одинаковыми скользунами, которые при помощи хомутов жестко прикреплены к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Снизу каждый скользун имеет две опорные поверхности, которые в сборе образуют одну горизонтальную плоскость, скользящую по верхней плоскости «рабочего стола». Перемещение несущей рамы силового каркаса посредством скольжения по силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10) – «столешнице» вдоль осей х и у производится при помощи нескольких гидроцилиндров, часть из которых обеспечивают движение вдоль оси х; часть – вдоль оси y. При горизонтальном позиционировании достаточная жёсткость конструкции манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) обеспечивается с помощью крестообразной опорной рамы 250 (фиг. 3, 4, 4а). Так же, манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а) может содержать блок АСУ (автоматизированной системы управления) 220 (фиг. 4), содержащий необходимые электронные компоненты для управления манипулятором-домкратом 200 (фиг. 1, 2, 3, 4, 4а).
[00069] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) также включает манипулятор-монтажник 300 (фиг. 1, 2, 5), который выполнен с возможностью монтажа элементов силовой конструкции, а также с возможностью горизонтального перемещения вдоль силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) по направляющей 770 (фиг. 1, 2, 5), расположенной с внешней стороны силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). То есть, манипулятор-монтажник 300 (фиг. 1, 2, 5) устанавливает в проектное положение и фиксирует элементы силовой конструкции, а именно несущие колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и наклонные и горизонтальные связи 740 (фиг. 1, 2, 3, 4, 5, 10), перемещаясь при этом вдоль внешней стороны силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) по направляющим 770 (фиг. 1, 2, 5). Манипулятор-монтажник 300 (фиг. 1, 2, 5) включает подвижное шасси 310 (фиг. 5) с собственным двигателем, которое позволяет ему перемещаться по направляющим 770 (фиг. 1, 2, 5) силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Двигатель манипулятора-монтажника 300 (фиг.1, 2, 5) может быть выполнен электрическим, питание может осуществляться через кабель, шинопровод или от аккумулятора. На нижней поверхности подвижного шасси 310 (фиг. 5) манипулятора-монтажника 300 (фиг. 1, 2, 5) размещено опорно-поворотное устройство 320 (фиг. 5), обеспечивающее возможность вращения манипулятора-монтажника 300 (фиг. 1, 2, 5) вокруг вертикальной оси. Ниже размещена поворотная рама 340 (фиг. 5), на которой закреплены установщики элементов силовой конструкции, а именно, установщик колонн 330 (фиг. 5) и установщик связей 360 (фиг.5), которые могут быть выполнены в виде пантографов. Установщик колонн 330 (фиг. 5) снабжён захватом колонн для удержания и установки колонн. Установщик связей 360 (фиг. 5) на подвижном конце имеет два цилиндрических шарнира, которые позволяют вращать узел установки связей вокруг вертикальной и горизонтальной оси. Установщик связей 360 (фиг. 5) может иметь устройство для крепления связей к колоннам и крепления наклонных связей к горизонтальным связям, выполненное в виде болтовёрта, заклёпочника или иного устройства, в зависимости от выбранного способа крепления колонн и связей. Манипулятор-монтажник 300 (фиг. 1, 2, 5) содержит так же блок АСУ (автоматизированной системы управления) 350 (фиг. 5), содержащий необходимые электронные компоненты для управления манипулятором-монтажником 300 (фиг. 1, 2, 5). Также манипулятор-монтажник (фиг. 1, 2, 5) может содержать системы технического зрения, энкодеры и другие датчики для ориентации манипуляторов в пространстве и позиционирования элементов силовой конструкции. Конструкция манипулятора-монтажника 300 (фиг. 1, 2, 5) обеспечивает повышенную точность установки элементов силовой конструкции в ограниченном пространстве, что способствует обеспечению возможности автоматизированного монтажа высотной и протяжённой в горизонтальной плоскости конструкции без горизонтальных перекрытий и с минимизацией участия человека в процессе монтажа.
[00070] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) включает манипулятор-транспортёр 400 (фиг. 1, 9), обеспечивающий доставку элементов силовой конструкции: несущих колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей 740 (фиг. 1, 2, 3, 4, 5, 10) от склада элементов к месту подъёма элементов на высоту монтажа. Манипулятор-транспортёр 400 (фиг. 1, 9) включает в себя подвижное шасси 440 (фиг. 9), которое аналогично по своему устройству шасси электрических или бензиновых вилочных погрузчиков и выполняется с возможностью удалённого управления оператором. Манипулятор-транспортёр 400 (фиг. 1, 9) также включает в себя блок АСУ 450 (фиг. 9), содержащий необходимые электронные компоненты для управления манипулятором-транспортёром (фиг. 1, 9). Ходовой двигатель 460 (фиг. 9) манипулятора-транспортёра 400 (фиг. 1, 9) может быть электрическим или двигателем внутреннего сгорания. Манипулятор-транспортёр 400 (фиг. 1, 9) включает в себя устройство захвата ТПК 420 (фиг. 8, 9), которое обеспечивает захват снаряженного ТПК на складе, удержание ТПК при транспортировке, передачу пустого ТПК на склад. В случае, если манипулятор-транспортёр 400 (фиг. 1, 9) выполнен на базе шасси вилочного погрузчика, устройство захвата ТПК 420 (фиг. 9) может быть выполнено на базе вил. Устройство захвата ТПК 420 (фиг. 9) выполняется с возможностью удержания двух ТПК (фиг. 8, 9) – одного снаряженного элементами силовой конструкции, другого пустого – при передаче ТПК манипулятору-подъёмнику 100 (фиг. 1, 6, 7, 8) при помощи механизма смены ТПК 410 (фиг. 9), также являющегося частью манипулятора-транспортёра 400 (фиг. 1, 9). Манипулятор-транспортёр 400 (фиг. 1, 9) может быть дополнительно оснащён камерами видеонаблюдения. Камеры позволяют контролировать направление движения манипулятора 400 (фиг. 1, 9) и работу механизма смены ТПК 410 (фиг. 9). Кроме того, манипулятор–транспортер 400 (фиг. 1, 9) имеет систему, работающую при движении/транспортировке ТПК 720 (фиг. 8, 9), включающую датчики расстояния, расположенные по периметру манипулятора–транспортера 400 (фиг. 1, 9) и контролирующие окружающее пространство для предотвращения опасного сближения или столкновения с объектами. Манипулятор–транспортер 400 (фиг. 1, 9) оснащен шасси 440 (фиг. 9), механизмом смены ТПК 410 (фиг. 9), блоком АСУ (автоматизированной системы управления) 450 (фиг. 9), обеспечивающим возможность автоматизированного монтажа высотной и протяжённой в горизонтальной плоскости конструкции без горизонтальных перекрытий и с минимизацией участия человека в процессе монтажа.
[00071] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) включает манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8), обеспечивающий подъём элементов силовой конструкции: несущей колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связь 740 (фиг. 1, 2, 3, 4, 5, 10) на высоту монтажа.
[00072] Манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) обеспечивает подъём элементов силовой конструкции: несущей колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связь 740 (фиг. 1, 2, 3, 4, 5, 10) на высоту монтажа, к манипулятору-монтажнику 300 (фиг. 1, 2, 5) и включает в себя в том числе подвижное шасси 170 (фиг. 6, 8) с ходовым двигателем 160 (фиг. 6, 7), перемещающееся по направляющим 780 (фиг. 1, 6), в качестве которых выступают балки силовой рамы710 (фиг. 1, 2, 3, 4, 5, 6, 10) гравитационного накопителя энергии 500 (фиг. 1, 2). Манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) обеспечивает подъём элементов силовой конструкции в непосредственной близости от монтируемого участка. При этом горизонтальное перемещение манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8) может осуществляться в то время, когда манипулятор-монтажник 300 (фиг 1, 2, 5) осуществляет монтаж элементов силовой конструкции. Таким образом, минимизируется время на перемещение манипулятора-монтажника 300 (фиг 1, 2, 5) к ТПК 720 (фиг. 8, 9) и обратно, к участку монтажа. На верхней поверхности подвижного шасси размещены: по крайней мере, один подъёмный барабан 110 (фиг. 6, 7), по крайней мере, один редуктор 120 (фиг. 6, 7, 8), и тяговый двигатель 130 (фиг. 6, 7), приводящий их в движение, тормозное устройство (на рисунке не показано). Шасси 170 (фиг. 6, 8) может являться самоходным и иметь в качестве движителя колесные пары с направляющими ребордами. Двигатель 160 (фиг. 6, 7) может быть выполнен электрическим, может дополняться редуктором и цепным приводом по меньшей мере на одну колесо или колесную пару. Рама шасси 170 (фиг. 6, 8) является трёхмерной рамой с увеличенной высотой. Манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) так же содержит блок АСУ (автоматизированной системы управления) 140 (фиг. 6, 7), содержащий необходимые электронные компоненты для управления манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8). При этом блок АСУ 140 (фиг. 6, 7) позволяет автоматизировать управление манипулятором 100 (фиг. 1, 6, 7, 8). Манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) может содержать систему технического зрения, энкодеры, датчики различных типов для дополнительной автоматизации.
[00073] Для функционирования манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8), манипулятора-монтажника 300 (фиг. 1, 2, 5) и манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) необходимо энергоснабжение. Подача электропитания может быть реализована с помощью кабельного соединения или посредством шинопровода. При этом источник питания может быть расположен как на уровне силовой рамы, так и на полу или на уровне фундамента. Возможна реализация автономной работы манипуляторов. В таком случае в качестве источника питания используют аккумуляторную батарею или двигатель внутреннего сгорания, оборудованный электрическим генератором.
[00074] Комплекс автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 500 (фиг. 1, 2) размещается на первом ярусе силовой конструкции, который предварительно возводится стандартными строительными средствами и техникой, что обеспечивает возможность дальнейшего автоматизированного монтажа высотной и протяжённой в горизонтальной плоскости конструкции без горизонтальных перекрытий и с минимизацией участия человека в процессе монтажа.
[00075] Кроме того, по крайней мере, один из манипуляторов дополнительно может быть оснащён системой технического зрения. Система технического зрения может быть реализована при помощи контактных и бесконтактных датчиков, датчиков положения и телевизионной системы для исключения столкновений манипуляторов с различного рода препятствиями и обеспечивают точность выполнения операций.
[00076] У комплекса 500 (фиг. 1, 2) может быть общий центр управления, где каждый манипулятор содержит устройство приема-передачи данных, обеспечивает возможность автоматизированного монтажа высотной и протяжённой в горизонтальной плоскости конструкции без горизонтальных перекрытий и с минимизацией участия человека в процессе монтажа.
[00077] Способ автоматизированного монтажа силовой конструкции гравитационного накопителя энергии, включает следующую последовательность операций (фиг. 11):
[00078] осуществляют монтаж первого яруса силовой конструкции (стандартными строительными средствами) и размещение на нём силовой рамы силовой конструкции.
[00079] устанавливают на силовую раму манипулятор-домкрат, манипулятор-подъёмник и манипулятор-монтажник.
[00080] поднимают силовую раму манипулятором-домкратом.
[00081] устанавливают колонны нового яруса с участием манипулятора-транспортёра, манипулятора-подъёмника и манипулятора-монтажника.
[00082] осуществляют горизонтальное двухкоординатное позиционирование верхней силовой рамы манипулятором-домкратом.
[00083] устанавливают связи нового яруса с участием манипулятора-транспортёра, манипулятора-подъёмника и манипулятора-монтажника.
[00084] переустанавливают манипулятор-домкрат в стартовое положение для возведения нового уровня силовой конструкции системы накопления энергии.
[00085] Повторяют этапы 3-7 необходимое число раз.
[00086] Монтаж первого яруса силовой конструкции осуществляется стандартными строительными средствами. Подготавливают фундамент (тип фундамента выбирается исходя из инженерно-геологических условий). На подготовленный фундамент устанавливают колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10), которые фиксируются между собой горизонтальными и наклонными связями 740 (фиг. 1, 2, 3, 4, 5, 10). Сверху первого уровня колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) устанавливается силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Силовая рама 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может быть сборной и устанавливаться по частям. Сборка силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) может осуществляться с помощью сварки, болтового соединения и других известных способов.
[00087] После размещения силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на ней устанавливают манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а). При этом верхняя часть манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) фиксируется на силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10), а нижняя часть манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) при помощи крестообразной опорной рамы 250 (фиг. 3, 4, 4а) опирается на опорные участки 750 (фиг. 3, 4) колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) первого яруса.
[00088] После размещения силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на ней устанавливают манипулятор-монтажник 300 (фиг. 1, 2, 5). При этом непосредственно на силовую раму 710 (фиг. 1, 2, 3, 4, 5, 6, 10) манипулятор-монтажник 300 (фиг. 1, 2, 5) опирается при помощи шасси 310 (фиг. 5), находящегося в верхней части манипулятора-монтажника 300 (фиг. 1, 2, 5), так что манипулятор-монтажник 300 (фиг. 1, 2, 5) оказывается размещённым под силовой рамой 710 (фиг. 1, 2, 3, 4, 5, 6, 10).
[00089] После размещения силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) на ней устанавливают манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8). При этом непосредственно на силовую раму манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) опирается при помощи шасси 170 (фиг. 6, 8), расположенного в нижней части манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8), так что манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) оказывается размещённым над силовой рамой 710 (фиг. 1, 2, 3, 4, 5, 6, 10).
[00090] Размещение манипулятора-домкрата 200 (1, 2, 3, 4, 4а), манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8), манипулятора-монтажника 300 (фиг. 1, 2, 5) на силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6) производится при помощи стандартных грузоподъёмных механизмов – например, при помощи автокранов.
[00091] После размещения манипулятора-домкрата 200 (1, 2, 3, 4, 4а), манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8) и манипулятора-монтажника 300 (фиг. 1, 2, 5) осуществляют подъём силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) манипулятором-домкратом 200 (1, 2, 3, 4, 4а) над уже возведенным уровнем силовой конструкции гравитационного накопителя энергии 600 (фиг. 10), на высоту, достаточную для установки очередного уровня колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) с горизонтальными и наклонными связями 740 (фиг. 1, 2, 3, 4, 5, 10). Манипулятор-домкрат 200 (1, 2, 3, 4, 4а), опирается на колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) посредством собственной крестообразной опорной рамы 250 (фиг. 3, 4, 4а), а на раму 250 (фиг. 3, 4, 4а) опирается механизм подъёма 240 (фиг. 3, 4), представляющий собой четыре одинаковых реечно-храповых подъёмных механизма. Привод каждого подъёмного механизма производится с помощью группы гидроцилиндров, за счёт чего и производится вертикальное перемещение (подъём) силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10).
[00092] После подъёма силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) монтируют колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). Для монтажа колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) манипулятор-транспортёр 400 (фиг. 1, 9) доставляет ТПК 720 (фиг. 8, 9), снаряженный колонной 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) со склада в зону подъёма манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8). С помощью механизма смены ТПК 420 (фиг. 9) манипулятор-транспортёр 400 (фиг. 1, 9) крепит ТПК 420 (фиг. 9) к подъёмному канату 180 (фиг. 8). Затем манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) осуществляет подъём транспортно-перегрузочного контейнера на канате 180 (фиг. 8) при помощи барабанов 110 (фиг. 6, 7), редукторов 120 (фиг. 6, 7, 8) и тягового двигателя 130 (фиг. 6, 7) на высоту монтажа. Для предотвращения раскручивания ТПК 720 (фиг. 8, 9) при подъёме в преимущественном варианте настоящего изобретения подъём осуществляют при помощи двух канатов 180 (фиг. 8), наматывающихся на два барабана 110 (фиг. 6, 7), при этом скорость наматывания канатов 180 (фиг. 8) одинаковая для обеспечения равномерного подъёма ТПК 720 (фиг. 8, 9). Поднятая ТПК 720 (фиг. 8, 9) прижимается верхней частью к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10) с некоторым усилием. Перед началом подъёма очередного ТПК 720 (фиг. 8, 9) с колонной 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) перемещается при помощи ходового двигателя 160 (фиг. 6, 7) и подвижного шасси 170 (фиг. 6, 8) по направляющим силовой рамы 780 (фиг. 1, 6) к участку монтаж колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) силового каркаса. При этом такое перемещение производится одновременно с выполнением манипулятором-монтажником 300 (фиг. 1, 2, 5) операции по позиционированию и установке колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10), что позволяет сократить время на перемещение манипулятора-монтажника 300 (фиг. 1, 2, 5) к манипулятору-транспортёру 400 (фиг. 1, 9), а значит повысить скорость монтажа силовой конструкции 600 (фиг. 10) и снизить таким образом временные затраты. Манипулятор-монтажник 300 (фиг. 1, 2, 5) при помощи подвижного шасси 310 (фиг. 5) перемещается вдоль силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) по направляющим 770 (фиг. 1, 2, 5) к манипулятору-подъёмнику 100 (фиг. 1, 6, 7, 8) и при помощи устройства захвата колонн, установленного на установщике колонн 330 (фиг .5), который в свою очередь расположен на поворотной раме 340 (фиг. 5), производит захват колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). При этом ТПК 720 (фиг. 8, 9) с колонной 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) прижато к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10) манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8) с некоторым усилием, что обеспечивает постоянство положения ТПК 720 (фиг. 8, 9) во время манипуляции с колонной 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). После того как манипулятор-монтажник 300 (фиг. 1, 2, 5) забрал колонну из ТПК 720 (фиг. 8, 9) манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) при помощи тягового двигателя 130 (фиг. 6, 7), редукторов 120 (фиг. 6, 7, 8), барабанов 110 (фиг. 6, 7) и канатов 180 (фиг. 8) осуществляет спуск ТПК 720 (фиг. 8, 9) вниз, где оно будет перехвачено манипулятором-транспортёром 400 (фиг. 1, 9). Подъём элемента силовой конструкции 600 (фиг. 10) также возможен без использования ТПК 720 (фиг. 8, 9) за счет выполнения закладных или иных конструктивных элементов силовой конструкции на колоннах или связях. В таком случае манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) осуществляет захват и перемещение колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и связей 740 (фиг. 1, 2, 3, 4, 5, 10) за счет, например, опускаемого крюка по направляющей, выполненной с возможностью удлинения. Установка колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) в проектное положение происходит за счёт: перемещения манипулятора-монтажника 300 (фиг. 1, 2, 5) по направляющим 770 (фиг. 1, 2, 5) к месту установки колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10); вращение манипулятора-монтажника 300 (фиг. 1, 2, 5) при помощи опорно-поворотного устройства 320 (фиг. 5) вокруг вертикальной оси; вращения механизма установки колонн 330 (фиг. 5) вокруг горизонтальной оси для позиционирования колонны вертикально; изменения длины механизма установки колонн 330 (фиг. 5). Изменение длины механизма установки колонн может производиться, например, за счёт того, что механизм установки колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) выполнен в виде пантографа. В зависимости от принятой схемы монтажа, механизм установки колонн 330 (фиг. 5) может также обеспечивать крепление установленной колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) к предыдущему ярусу колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) при помощи сварки, болтового соединения, клёпки и другими известными способами, кроме того, может быть реализовано шарнирное соединение колонн. После установки колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) в проектное положение при помощи механизма установки колонн 330 (фиг. 5) производится прижатие колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) к опорному участку 760 (фиг. 3, 4) силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Для обеспечения прижатия опорный участок 760 (фиг. 3, 4) может быть выполнен, например, в виде прижимного башмака, который опускается на верхнюю часть колонны под собственным весом после того, как механизм установки колонны освобождает механический замок.
[00093] После установки всех колонн яруса в проектное положение с помощью манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) производится горизонтальное двухкоординатное позиционирование силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Позиционирование производится с помощью механизма сдвига 210 (фиг. 4) с опорой на крестообразную опорную раму 250 (фиг. 3, 4, 4а). Механизм сдвига 210 (фиг. 4) обеспечивает перемещение силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) силового каркаса 600 (фиг. 10) посредством скольжения вдоль осей х и у при помощи нескольких гидроцилиндров, часть из которых обеспечивают движение вдоль оси х; часть – вдоль оси y. Позиционирование производится для обеспечения вертикальности всех колонн. При позиционировании могут применяться различные устройства контроля вертикальности, например, лазерные отвесы.
[00094] После горизонтального позиционирования силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) производится монтаж связей 740 (фиг. 1, 2, 3, 4, 5, 10) силового каркаса 600 (фиг. 10). Для монтажа связей манипулятор-транспортёр 100 (фиг. 1, 9) доставляет ТПК 720 (фиг. 8, 9, снаряженный несколькими связями 740 (фиг. 1, 2, 3, 4, 5, 10) со склада в зону подъёма манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8). С помощью механизма смены ТПК 420 (фиг. 9) манипулятор-транспортёр 400 (фиг. 1, 9) крепит ТПК 720 (фиг. 8, 9) к подъёмному канату 180 (фиг. 8). Затем манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) осуществляет подъём ТПК 720 (фиг. 8, 9) на канате 180 (фиг. 8) при помощи барабанов 110 (фиг. 6, 7), редукторов 120 (фиг. 6, 7, 8) и тягового двигателя 130 (фиг. 6, 7) на высоту монтажа. Для предотвращения раскручивания ТПК 720 (фиг. 8, 9) при подъёме в преимущественном варианте настоящего изобретения подъём осуществляют с использованием двух канатов 180 (фиг. 8), наматывающихся на два барабана 110 (фиг. 6, 7), при этом скорость наматывания канатов 180 (фиг. 8) одинаковая для обеспечения равномерного подъёма ТПК 720 (фиг. 8, 9). Поднятая ТПК 720 (фиг. 8, 9) прижимается верхней частью к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10) с некоторым усилием. Перед началом подъёма очередного ТПК 720 (фиг. 8, 9) со связями 740 (фиг. 1, 2, 3, 4, 5, 10) манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) может переместиться при помощи ходового двигателя 160 (фиг. 6, 7) и подвижного шасси 170 (фиг. 6, 8) по направляющим силовой рамы 780 (фиг. 1, 6) ближе к участку силового каркаса, где производится монтаж связей. При этом такое перемещение производится одновременно с выполнением манипулятором-монтажником 300 (фиг. 1, 2, 5) операции по позиционированию и установке связей, 740 (фиг. 1, 2, 3, 4, 5, 10) что позволяет сократить время на перемещение манипулятора-монтажника к манипулятору-транспортёру 400 (фиг. 1, 9), а значит повысить скорость монтажа силовой конструкции и снизить таким образом временные затраты. Манипулятор-монтажник 300 (фиг. 1, 2, 5) при помощи подвижного шасси 310 (фиг. 5) перемещается вдоль силовой рамы 710 (фиг. 1, 2, 3, 4, 5. 6, 10) по направляющим 770 (фиг. 1, 5, 5) к манипулятору-подъёмнику 100 (фиг. 1, 6, 7, 8) и при помощи устройства захвата связей, установленного на механизме установки связей 360 (фиг. 5), который в свою очередь расположен на поворотной раме 340 (фиг. 5), производит захват одной связи 740 (фиг. 1, 2, 3, 4, 5, 10). При этом ТПК 720 (фиг. 8, 9) прижат к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10) манипулятором-подъёмником 100 (фиг. 1, 6, 7, 8) с некоторым усилием, что обеспечивает постоянство положения ТПК 720 (фиг. 8, 9) во время манипуляции со связями 740 (фиг. 1, 2, 3, 4, 5, 10). После того как манипулятор-монтажник 300 (фиг. 1, 2, 5) забрал все связи 740 (фиг. 1, 2, 3, 4, 5, 10) из ТПК 720 (фиг. 8, 9) манипулятор-подъёмник 100 (фиг. 1, 6, 7, 8) при помощи тягового двигателя 130 (фиг. 6, 7), редукторов 120 (фиг. 6, 7, 8), барабанов 110 (фиг. 6, 7) и канатов 180 (фиг. 8) осуществляет спуск ТПК 720 (фиг. 8, 9) вниз, где он будет перехвачено манипулятором-транспортёром 400 (фиг. 1, 9). Установка каждой связи 740 (фиг. 1, 2, 3, 4, 5, 10) в проектное положение происходит за счёт: перемещения манипулятора-монтажника 300 (фиг. 1, 2, 5) по направляющим 770 (фиг. 1, 2, 5) к месту установки колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10); вращение манипулятора-монтажника 300 (фиг. 1, 2, 5) при помощи опорно-поворотного устройства 320 (фиг. 5) вокруг вертикальной оси; вращения механизма установки связей 360 (фиг. 5) вокруг горизонтальной оси для позиционирования связи горизонтально либо под необходимым углом; изменения длины механизма установки связей 360 (фиг. 5); поворота связи 740 (фиг. 1, 2, 3, 4, 5, 10) вокруг своей оси в необходимое для закрепление положение. Изменение длины механизма установки связей 360 (фиг. 5) может производиться, например, за счёт того, что механизм установки колонн 330 (фиг. 5) выполнен в виде пантографа. Поворот связи 740 (фиг. 1, 2, 3, 4, 5, 10) вокруг своей оси может осуществляться, например, за счёт того, что механизм установки связей 360 (фиг. 5) на подвижном конце имеет два цилиндрических шарнира, которые позволяют вращать механизм установки связей 360 (фиг. 5) вокруг вертикальной и горизонтальной оси. В зависимости от принятой схемы монтажа, механизм установки связей 360 (фиг. 5) также обеспечивает крепление связи 740 (фиг. 1, 2, 3, 4, 5, 10) к колоннам 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) (для горизонтальной связи) и к колонне 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) и горизонтальной связи 740 (фиг. 1, 2, 3, 4, 5, 10) (для наклонной связи). Крепление может производится при помощи сварки, болтового соединения, клёпки и другими известными способами.
[00095] После установки всех связей 740 (фиг. 1, 2, 3, 4, 5, 10) яруса силовой конструкции 600 (фиг. 10) вес силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10) переносится манипулятором-домкратом 200 (фиг. 1, 2, 3, 4, 4а) на закреплённые связями 740 (фиг. 1, 2, 3, 4, 5, 10) колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10) нового яруса. При этом опорные участки 760 (фиг. 3, 4) прижимаются к силовой раме 710 (фиг. 1, 2, 3, 4, 5, 6, 10), в результате чего производится закрытие механических замков. Затем осуществляется переустановка манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) в стартовое положение. Для этого манипулятор-домкрат 200 (фиг. 1, 2, 3, 4, 4а), опираясь на силовую раму 710 (фиг. 1, 2, 3, 4, 5, 6, 10), при помощи механизма подъёма 240 (фиг. 3, 4) и вертикальных направляющих 230 (фиг. 3, 4) осуществляет подъём крестообразной опорной рамы 250 (фиг. 3, 4, 4а) на высоту равную высоте колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). В преимущественном варианте настоящего изобретения перед началом подъёма опорные лапы крестообразной опорной рамы 250 (фиг. 3, 4, 4а) втягиваются в центральную часть рамы, выполненную коробчатой, тем самым обеспечивается беспрепятственный подъём крестообразной опорной рамы 250 (фиг. 3, 4, 4а). После подъёма на новый уровень крестообразная опорная рама 250 (фиг. 3, 4, 4а) оказывается напротив опорного участка 750 (фиг. 3, 4) колонны 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10), лапы крестообразной опорной рамы 250 (фиг. 3, 4, 4а) выдвигаются на опорный участок колонны 750 (фиг. 3, 4), обеспечивая его охват и возможность упора манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) на последний ярус колонн 730 (фиг. 1, 2, 3, 4, 4а, 5, 8, 10). После обеспечения упора манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а) на последний ярус колонн цикл строительства замыкается.
[00096] После возведения силовой конструкции 600 (фиг. 10) нужной высоты производится демонтаж манипулятора-домкрата 200 (фиг. 1, 2, 3, 4, 4а), манипулятора-монтажника 300 (фиг. 1, 2, 5), манипулятора-подъёмника 100 (фиг. 1, 6, 7, 8) с верхней силовой рамы 710 (фиг. 1, 2, 3, 4, 5, 6, 10). Для демонтажа возможна частичная разборка манипуляторов. Также для демонтажа может использоваться крановое оборудование, например, кран-балка, заблаговременно установленная над силовой рамой 710 (фиг. 1, 2, 3, 4, 5, 6, 10) под крышей. После демонтажа перечисленные манипуляторы могут быть повторно и многократно использованы для возведения силовых конструкций систем гравитационного накопления энергии 600 (фиг. 10), что уменьшает капитальные затраты на возведения систем гравитационного накопления энергии.
[00097] При этом монтажные операции выполняются под контролем автоматизированных систем управления соответствующих манипуляторов, которые получают информацию от датчиков (включая, но не ограничиваясь: системы технического зрения, лазерных дальномеров, энкодеров, датчиков прижима), обмениваются информацией между собой, а могут получать и передавать данные системе управления верхнего уровня и операторам.
[00098] Таким образом, использование заявленного изобретения обеспечивает возможность автоматизированного монтажа силовой конструкции гравитационного накопителя энергии 600 (фиг. 10) с минимизацией участия человека в процессе монтажа, при этом возводимая конструкция обладает необходимыми характеристиками для того, чтобы быть использованной в качестве гравитационного накопителя.
[00099] Реализация заявленного изобретения возможна с помощью известных промышленных изделий технологий, в том числе описанных в заявке, но также и понятных для специалиста и поэтому не раскрытых в настоящей заявке. Для использования силового каркаса требуется возведение ограждения, на способ и систему возведения которого подается отдельная заявка на получение патента на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного монтажа внешнего ограждения гравитационного накопителя энергии и система для его реализации | 2021 |
|
RU2759162C1 |
| МОБИЛЬНАЯ ПУСКОВАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ ИЛИ ПАРОГАЗОГЕНЕРАТОРВ | 2014 |
|
RU2568820C2 |
| НЕСУЩАЯ КОНСТРУКЦИЯ ГРАВИТАЦИОННОЙ СИСТЕМЫ НАКОПЛЕНИЯ ЭНЕРГИИ | 2019 |
|
RU2743988C1 |
| УНИВЕРСАЛЬНАЯ КАССЕТА ПРЕИМУЩЕСТВЕННО ДЛЯ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ | 2014 |
|
RU2567677C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ЭРОЗИОННОГО ВОЗДЕЙСТВИЯ АТМОСФЕРНЫХ ОСАДКОВ НА ПОЧВУ | 2023 |
|
RU2808679C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| УСТРОЙСТВО ДЛЯ АМОРТИЗАЦИИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ШАХТНОМ СООРУЖЕНИИ | 2011 |
|
RU2457376C1 |
| Способ автоматизированного возведения сооружений | 2021 |
|
RU2761783C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2487078C2 |
| Буровая установка | 1988 |
|
SU1548397A1 |
Способ автоматизированного монтажа силовой конструкции гравитационного накопителя энергии и комплекс устройств для его осуществления относятся к комплексу устройств, используемых при строительстве, и способу его реализации, в том числе с возможностью осуществления автоматизированного монтажа. Технический результат заявленного изобретения заключается в возможности автоматизированного монтажа силовой конструкции гравитационного накопителя энергии с минимизацией участия человека в процессе монтажных работ внутри контура возводимой конструкции. 2 н. и 17 з.п. ф-лы, 11 ил.
1. Способ автоматизированного монтажа силовой конструкции гравитационного накопителя энергии, включающий следующую последовательность операций:
- осуществляют монтаж первого яруса силовой конструкции;
- на первый ярус устанавливают силовую раму силовой конструкции;
- на силовой раме размещают по меньшей мере по одному манипулятору-домкрату, манипулятору-монтажнику и манипулятору-подъёмнику;
- осуществляют подъём силовой рамы манипулятором-домкратом на высоту, достаточную для установки нового яруса силового каркаса между имеющимся ярусом и силовой рамой;
- с помощью манипулятора-транспортёра доставляют со склада колонны силового каркаса в зону подъёма;
- с помощью манипулятора-подъёмника поднимают колонны на уровень монтажа;
- формируют непосредственно под силовой рамой новый ярус конструкции, устанавливая каждую колонну в проектное положение с помощью манипулятора-монтажника, при этом манипулятор-подъёмник перемещается по силовой раме силовой конструкции так, что подъём колонн осуществляется рядом с уже смонтированным участком;
- с помощью механизма сдвига манипулятора-домкрата и крестообразной опорной рамы манипулятора-домкрата перемещают силовую раму в двух горизонтальных координатах для обеспечения соблюдения вертикальности каждого ряда колонн;
- с помощью манипулятора-транспортёра доставляют со склада связи силового каркаса в зону подъёма;
- поднимают связи на уровень монтажа с помощью манипулятора-подъёмника;
- устанавливают каждую связь в проектное положение с помощью манипулятора-монтажника, фиксируя каждую колонну в проектном положении и завершая формирование нового яруса силовой конструкции, а затем переносят вес силовой рамы с манипулятора-домкрата на установленный ярус колонн с помощью манипулятора-домкрата, при этом манипулятор-подъёмник перемещается по силовой раме силовой конструкции так, что подъём связей осуществляется рядом с уже смонтированным участком;
- переносят вес манипулятора-домкрата на силовую раму и затем перемещают крестообразную опорную раму манипулятора-домкрата на один ярус выше с помощью манипулятора-домкрата;
- повторяют операции по подъёму силовой рамы и формированию нового яруса силовой конструкции необходимое число раз.
2. Способ по п. 1, отличающийся тем, что элементы конструкции перемещаются манипулятором-транспортёром и манипулятором-подъёмником с использованием по меньшей мере двух транспортно-перегрузочных контейнеров.
3. Способ по п. 1, отличающийся тем, что электроснабжение манипулятора-подъёмника, манипулятора-монтажника и манипулятора-домкрата реализовано при помощи проводного соединения с источником питания.
4. Способ по п. 3, отличающийся тем, что источник питания размещён на силовой раме.
5. Способ по п. 1, отличающийся тем, что электроснабжение манипулятора-транспортёра реализовано автономным.
6. Способ по п. 5, отличающийся тем, что автономным источником питания служит аккумуляторная батарея.
7. Способ по п. 1, отличающийся тем, что перемещают крестообразную опорную раму манипулятора-домкрата на один ярус силовой конструкции выше с помощью системы гидроцилиндров.
8. Комплекс устройств для автоматизированного монтажа силовой конструкции гравитационного накопителя энергии, который включает, по меньшей мере: манипулятор-домкрат, манипулятор-монтажник, манипулятор-подъёмник, манипулятор-транспортёр,
при этом:
- манипулятор-домкрат, манипулятор-монтажник и манипулятор-подъёмник размещены на силовой раме силовой конструкции;
- манипулятор-домкрат включает механизм сдвига, механизм подъема и крестообразную опорную раму для обеспечения возможности как вертикального подъёма силовой рамы, так и её горизонтального позиционирования в двух взаимно перпендикулярных направлениях;
- манипулятор-монтажник предназначен для установки элементов силовой конструкции на новом ярусе непосредственно под силовой рамой, включает шасси для перемещения по горизонтали вдоль силовой рамы;
- манипулятор-подъёмник предназначен для вертикальной доставки элементов силовой конструкции от манипулятора-транспортёра к манипулятору-монтажнику, включает канат для подъёма элементов конструкции и по меньшей мере один барабан для наматывания каната, шасси для горизонтального перемещения по силовой раме;
- манипулятор-транспортёр предназначен для перемещения по строительной площадке на нижнем уровне и обеспечения доставки элементов силовой конструкции со склада в зону подъёма манипулятором-подъёмником.
9. Комплекс устройств по п. 8, отличающийся тем, что система подъема и механизм сдвига включают систему гидроцилиндров.
10. Комплекс устройств по п. 9, отличающийся тем, что манипулятор-монтажник выполнен с возможностью перемещения по горизонтали вдоль силовой рамы по направляющим силовой рамы.
11. Комплекс устройств по п. 8, отличающийся тем, что манипулятор-монтажник включает датчики для позиционирования элементов конструкции.
12. Комплекс устройств по п. 8, отличающийся тем, что элементы конструкции выполнены с возможностью перемещения с помощью манипулятора-транспортёра и манипулятора-подъёмника с использованием по меньшей мере двух транспортно-перегрузочных контейнеров.
13. Комплекс устройств по п. 8, отличающийся тем, что электроснабжение манипулятора-подъёмника, манипулятора-монтажника и манипулятора-домкрата реализовано при помощи проводного соединения с источником питания.
14. Комплекс устройств по п. 8, отличающийся тем, что электроснабжение манипулятора-транспортёра реализовано автономным.
15. Комплекс устройств по п. 8, отличающийся тем, что по крайней мере один манипулятор содержит устройство приема-передачи данных.
16. Комплекс устройств по п. 8, отличающийся тем, что по крайней мере один манипулятор содержит систему технического зрения.
17. Комплекс устройств по п. 8, отличающийся тем, что по крайней мере один манипулятор включает блок автоматизированной системы управления.
18. Комплекс устройств по п. 13, отличающийся тем, что источник питания размещён на уровне силовой рамы.
19. Комплекс устройств по п. 15, отличающийся тем, что автономным источником питания служит аккумуляторная батарея.
| CN 1155029 A, 23.07.1997 | |||
| Автоматизированный способ возведения зданий из строительных блоков | 2015 |
|
RU2606886C1 |
| KR 100980806 B1, 10.09.2010 | |||
| НЕСУЩАЯ КОНСТРУКЦИЯ ГРАВИТАЦИОННОЙ СИСТЕМЫ НАКОПЛЕНИЯ ЭНЕРГИИ | 2019 |
|
RU2743988C1 |
| Способ изготовления крупногабаритного готового объемного модуля и способ строительства здания из крупногабаритных готовых объемных модулей | 2018 |
|
RU2712845C1 |
| Способ возведения многоэтажного здания с энергосберегающими многослойными стенами | 2019 |
|
RU2732741C1 |
| Способ монтажа каркаса здания | 1977 |
|
SU730941A1 |

