Способ обнаружения пожара и места его возникновения и система по осуществлению способа относятся к способам и системам многофакторного самонастраивающего мониторинга за пожарной опасностью защищаемых объектов: помещений, сооружений, автономных обитаемых закрытых сред.
Известен извещатель пожарный аспирационный ИПА (ТУ 4371-086-00226827-2008) ЗАО «ПО «Спецавтоматика», г. Бийск, Алтайский край, который взят за прототип
Известны патенты RU 2344859, 2639050, рассматриваемые как аналоги, использование которых позволяет осуществлять защиту от пожаров, создавать разные варианты защиты от пожарной опасности людей и материальных ценностей.
В основу работы известных устройств положено:
- транспортирование с помощью воздуховодных труб с заборными отверстиями из защищаемого объекта газовоздушной смеси до герметизированного корпуса извещателя аспирационного, состоящего из: отсека разряжения, отсека нагнетания, фильтров грубой и тонкой очистки, камеры измерений, блока внешних электрических соединений, выхлопной части;
- измерение факторов контролируемого процесса, а именно: изменения температуры контролируемой среды, и ее изменение оптической плотности газовоздушной среды, и их изменение концентраций опасных газов, и их изменение скорости газовоздушного потока;
- реагирование на опасные изменения факторов контролируемого процесса с формированием извещений и ранжированием по степеням пожарной опасности.
Недостатком известного способа, осуществляемого одним извещателем пожарным аспирационным является отсутствие возможности определять одновременно: появление пожара и координаты места его возникновения.
Отсутствие информации о координатах места возникновения пожара, особенно при защите больших объектов, затрудняют оперативную работу по тушению, не позволяют быстро, экономично и с малым расходом огнетушащего вещества осуществлять автоматическую подачу вещества на место возгорания.
Задачей предлагаемого изобретения является: обеспечение одновременного эффективного многофакторного контроля защищаемого объекта на предмет пожарной опасности и определение координат места возникновения пожара.
Технический результат должен заключаться в появлении дополнительной функциональной возможности, а именно: определять место возникновения пожара, известными извещателями пожарными аспирационными, объединенными в единую систему.
Поставленная задача решается следующим способом и системой
Способ характеризуется выполнением следующих этапов:
- объединяют посредством интерфейсных связей объектовый компьютер с двумя полностью одинаковыми извещателями пожарными аспирационными;
- выполняют трехмерно по заданным координатам в защищаемом объекте две одинаковые рядом расположенные сети заборных отверстий, входящие в состав своего воздуховода, образующие полностью одинаковые ветки для каждого из двух извещателей пожарных аспирационных;
- соединяют каждую ветку со своим извещателем;
- осуществляют от общего источника питания электроснабжение обоих извещателей;
- настраивают посредством внутреннего вентилятора каждого извещателя скорость транспортирования забираемой из помещения газовоздушной смеси на свою нормативную величину, при этом разница скорость V1 задана более высокой, чем скорость V2, с учетом точностных характеристик используемого для замера измерителя скорости, и погрешности установки скорости;
- используют имеющий более высокую скорость транспортирования первый извещатель пожарный аспирационный (ИПА) со своей входной воздуховодной веткой для формирования, в случае регистрации этим извещателем сигнала о пожаре стартовой команды «Пожар»;
- запускают по команде «Пожар» посредством объектового компьютера отсчет времени, а в момент поступления от второго ИПА сигнала «Пожар», регистрирующего им возникновение пожара, останавливают отсчет времени по финишной команде компьютера;
- определяют посредством объектового компьютера длительность временного интервала между сигналами «Пожар» первого и второго ИПА»
- определяют расстояние до воздухозаборного отверстия, возле которого возник пожар, по программе, заложенной в компьютер по формуле V1*V2*t/V1-V2=L,
где V1 (м/с) - заданная скорость траснпортирования газовоздушной смеси в первом воздуховоде,
V2 (м/c) - заданная скорость транспортирования газовоздушной смеси во втором воздуховоде;
- t (c) - длительность времени от появления сигнала «Пожар» первого ИПА до появления сигнала «Пожар» второго ИПА;
L (м) - длина трубопровода от ИПА до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара:
- определяют по ранее заданным известным координатам воздухозаборного отверстия, принявшего газовоздушную смесь с факторами пожарной опасности координаты возникшего пожара посредством заданной программы, установленной в компьютере.
Система обнаружения пожара и места его возникновения характеризуется тем, что состоит из двух параллельных и полностью идентичных и рядом расположенных воздуховодов с отверстиями забора воздуха и с выходными отверстиями для заборного воздуха, соединенных соответственно со входом первого ИПА и со входом второго ИПА, запитанными от общего источника электропитания, соединенными между собой и с объектовым компьютером интерфейсной связью, координаты отверстий заранее определены и заданы, при этом первый и второй ИПА выполнены с возможностью посредством настройки внутренних вентиляторов задавать скорости транспортирования воздуха по воздуховодам, причем скорость транспортирования воздуха в первом воздуховоде задана более высокая, чем скорость транспортирования воздуха во втором воздуховоде, формировать команды, поступающие посредством интерфейсной связи в компьютер, который в свою очередь по заданной программе, на основе полученной информации о задержки по времени, определяет координаты возникшего пожара.
Интерфейс может быть выполнен RS-485.
Более подробно осуществление способа и системы поясняется при помощи иллюстрации, показанной на фиг.1.
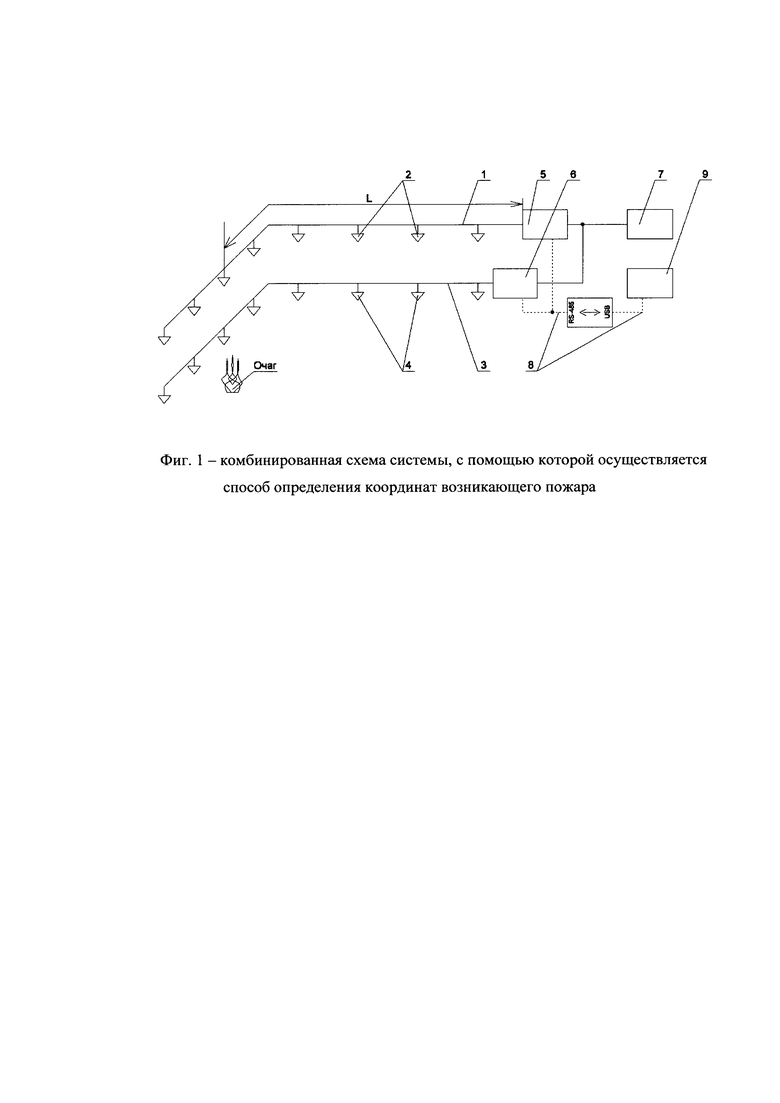
Фиг. 1 - комбинированная схема системы, с помощью которой осуществляется способ определения координат возникающего пожара.
Система состоит из двух параллельных и полностью идентичных и рядом расположенных воздуховодов 1 с отверстиями 2 забора воздуха и 3 с отверстиями 4 забора воздуха, соединенных соответственно с извещателем пожарным аспирационным 5, с извещателем пожарным аспирационным 6, запитанными от источника 7, которые соединены между собой интерфейсной связью 8 между собой и с объектовым компьютером 9, при этом извещатели выбраны типа ИПА, интерфейсы - типа RC - 485, координаты отверстий заранее определены и заданы. Работает система следующим образом.
Оба извещателя 5 и 6 работают по одному алгоритму и обладают равной чувствительностью.
Посредством извещателя 5 (настройкой внутреннего вентилятора) в воздуховоде 1 задана скорость транспортирования воздуха V1, аналогично в воздухопроводе 3 посредством извещателя 6 задана скорость транспортирования воздуха V2, причем скорость VI задана более высокой, чем скорость V2.
В случае возгорания сигнал о пожаре поступает по более скоростному каналу в извещатель 5, который формирует стартовую команду, по которой посредством интерфейса 8 запускают отчет времени в компьютере 9. По менее скоростному каналу сигнал о пожаре поступает в извещатель 6 с задержкой по времени, при этом извещатель вырабатывает финишную команду, поступающей в компьютер. Компьютер по заданной программе, на основе полученной информации о задержке по времени, определяет координаты возникшего пожара.
Таким образом, использование системы, состоящей из двух извещателей пожарных аспирационных вместе со своими воздухопроводами и заборными отверстиями, осуществляющих многофакторый контроль пожарной опасности в защищаемом объекте, позволяет посредством компьютера, интерфейсной связи, выполненной между извещателями и компьютером, обрести новые функциональные возможности, а именно определять координаты возникающего пожара.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ОПРЕДЕЛЕНИЯ ЕГО КООРДИНАТ | 2021 |
|
RU2775497C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ОПРЕДЕЛЕНИЯ ЕГО КООРДИНАТ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2775498C1 |
| СПОСОБ БОРЬБЫ С ПОЖАРНОЙ ОПАСНОСТЬЮ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2777212C1 |
| СПОСОБ БОРЬБЫ С ПОЖАРНОЙ ОПАСНОСТЬЮ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2777012C1 |
| СИСТЕМА И СПОСОБЫ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2730962C1 |
| СПОСОБ МНОГОФАКТОРНОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2692926C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБИТАЕМЫХ ОБЪЕКТОВ И КОМБИНИРОВАННЫЙ СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2751424C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБИТАЕМЫХ ОБЪЕКТОВ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2748633C1 |
| СПОСОБ КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2824471C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРНОЙ ОПАСНОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2692499C1 |
Группа изобретений относится к способам и системам многофакторного самонастраивающегося мониторинга за пожарной опасностью защищаемых объектов. Способ обнаружения пожара и места его возникновения характеризуется выполнением следующих этапов: объединяют посредством интерфейсных связей объектовый компьютер с двумя полностью одинаковыми извещателями пожарными аспирационными (ИПА); выполняют трехмерно по заданным координатам в защищаемом объекте две одинаковые рядом расположенные сети заборных отверстий, входящие в состав своего воздуховода, образующие полностью одинаковые ветки для каждого из двух ИПА; соединяют каждую ветку со своим ИПА; осуществляют от общего источника питания электроснабжение обоих ИПА; настраивают посредством внутреннего вентилятора каждого ИПА скорость транспортирования забираемой из помещения газовоздушной смеси на свою нормативную величину, при этом скорость V1 задана более высокой, чем скорость V2, с учетом точностных характеристик используемого для замера измерителя скорости, и погрешности установки скорости; используют имеющий более высокую скорость транспортирования первый ИПА со своей входной воздуховодной веткой для формирования, в случае регистрации этим ИПА сигнала о пожаре стартовой команды «Пожар»; запускают по команде «Пожар» посредством объектового компьютера отсчет времени, а в момент поступления от второго ИПА сигнала «Пожар», регистрирующего им возникновение пожара, останавливают отсчет времени по финишной команде компьютера; определяют посредством объектового компьютера длительность временного интервала между сигналами «Пожар» первого и второго ИПА; определяют расстояние до воздухозаборного отверстия, возле которого возник пожар, по программе, заложенной в компьютер, по формуле V1*V2*t/V1-V2=L, где V1 (м/с) - заданная скорость транспортирования газовоздушной смеси в первом воздуховоде, V2 (м/c) - заданная скорость транспортирования газовоздушной смеси во втором воздуховоде, t (c) - длительность времени от появления сигнала «Пожар» первого ИПА до появления сигнала «Пожар» второго ИПА, L (м) - длина трубопровода от ИПА до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара; определяют по ранее заданным известным координатам воздухозаборного отверстия, принявшего газовоздушную смесь с факторами пожарной опасности, координаты возникшего пожара посредством заданной программы, установленной в компьютере. Технический результат - обеспечение одновременного эффективного многофакторного контроля защищаемого объекта на предмет пожарной опасности и определение координат места возникновения пожара. 2 н. и 1 з.п. ф-лы, 1 ил.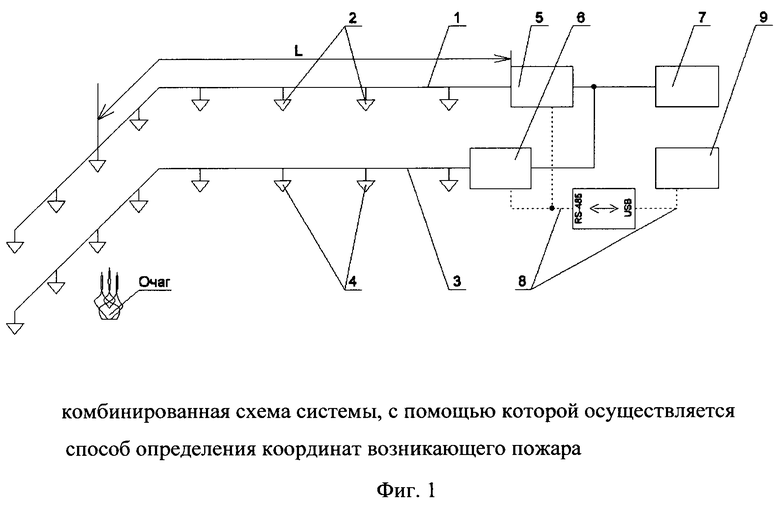
1. Способ обнаружения пожара и места его возникновения, характеризующийся выполнением следующих этапов:
- объединяют посредством интерфейсных связей объектовый компьютер с двумя полностью одинаковыми извещателями пожарными аспирационными;
- выполняют трехмерно по заданным координатам в защищаемом объекте две одинаковые рядом расположенные сети заборных отверстий, входящие в состав своего воздуховода, образующие полностью одинаковые ветки для каждого из двух извещателей пожарных аспирационных;
- соединяют каждую ветку со своим извещателем;
- осуществляют от общего источника питания электроснабжение обоих извещателей;
- настраивают посредством внутреннего вентилятора каждого извещателя скорость транспортирования забираемой из помещения газовоздушной смеси на свою нормативную величину, при этом скорость V1 задана более высокой, чем скорость V2, с учетом точностных характеристик используемого для замера измерителя скорости, и погрешности установки скорости;
- используют имеющий более высокую скорость транспортирования первый извещатель пожарный аспирационный (ИПА) со своей входной воздуховодной веткой для формирования в случае регистрации этим извещателем сигнала о пожаре стартовой команды «Пожар»;
- запускают по команде «Пожар» посредством объектового компьютера отсчет времени, а в момент поступления от второго ИПА сигнала «Пожар» регистрирующего возникновение пожара, останавливают отсчет времени по финишной команде компьютера;
- определяют посредством объектового компьютера длительность временного интервала между сигналами «Пожар» первого и второго ИПА»;
- определяют расстояние до воздухозаборного отверстия, возле которого возник пожар, по программе, заложенной в компьютер, по формуле V1*V2*t/V1-V2=L, где V1 (м/с) - заданная скорость транспортирования газовоздушной смеси в первом воздуховоде, V2 (м/c) - заданная скорость транспортирования газовоздушной смеси во втором воздуховоде;
- t (c) - длительность времени от появления сигнала «Пожар» первого ИПА до появления сигнала «Пожар» второго ИПА;
L (м) - длина трубопровода от ИПА до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара;
- определяют по ранее заданным известным координатам воздухозаборного отверстия, принявшего газовоздушную смесь с факторами пожарной опасности, координаты возникшего пожара посредством заданной программы, установленной в компьютере.
2. Система обнаружения пожара и места его возникновения, характеризующаяся тем, что состоит из двух параллельных, полностью идентичных и рядом распложенных воздуховодов с отверстиями забора воздуха и с выходными отверстиями для забранного воздуха, соединенных соответственно со входом первого ИПА и со входом второго ИПА, запитанными от общего источника электропитания, соединенными между собой и с объектовым компьютером интерфейсной связью, координаты отверстий заранее определены и заданы, при этом первый и второй ИПА выполнены с возможностью посредством настройки внутренних вентиляторов задавать скорости транспортирования воздуха по воздуховодам, причем скорость транспортирования воздуха в первом воздуховоде задана более высокой, чем скорость транспортирования воздуха во втором воздуховоде, формировать команды, поступающие посредством интерфейсной связи в компьютер, который в свою очередь по заданной программе, на основе полученной информации о задержки по времени, определяет координаты возникшего пожара.
3. Система по п. 2, отличающаяся тем, что интерфейс выполнен RS-485.
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ИНТЕЛЛЕКТУАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2344859C2 |
| ИЗВЕЩАТЕЛЬ ПОЖАРНЫЙ АСПИРАЦИОННЫЙ | 2016 |
|
RU2639050C1 |
| WO 2014059479 A1, 24.04.2014 | |||
| JP 4012764 A, 17.01.1992. | |||

