Способ обнаружения пожара и определения его координат относится к способам многофакторного самонастраивающего мониторинга за пожарной опасностью защищаемых объектов: помещений, сооружений, автономных обитаемых закрытых сред.
Известен извещатель пожарный аспирационный ИПА ЗАО «ПО «Спецавтоматика», г. Бийск, Алтайский край, который взят за прототип.
Известны патенты RU 2344859, 2639050, рассматриваемые как аналоги, использование которых позволяет осуществлять защиту от пожаров, создавать разные варианты защиты от пожарной опасности людей и материальных ценностей.
В основу работы известных устройств положено:
- транспортировка с помощью воздуховодных труб с заборными отверстиями из защищаемого объекта газовоздушной смеси до герметизированного корпуса извещателя аспирационного с внутренним вентилятором и, состоящего из: отсека разряжения, отсека нагнетания, вентилятора фильтров грубой и тонкой очистки, камеры измерений, микроконтроллера, блока внешних электрических соединений, выхлопной части;
- измерение факторов контролируемого процесса, а именно: изменения температуры контролируемой среды, и изменения оптической плотности газовоздушной среды, и изменения концентраций опасных газов, и изменения скорости газовоздушного потока;
- реагирование на опасные изменения факторов контролируемого процесса с формированием извещений и ранжированием по степеням пожарной опасности.
Недостатком известного способа, осуществляемого одним извещателем пожарным аспирационным, является отсутствие возможности определять одновременно появление пожара и координат места его возникновения.
Отсутствие информации о координатах места возникновения пожара, особенно при защите больших объектов, затрудняют оперативную работу по тушению, не позволяют быстро, экономично и с малым расходом огнетушащего вещества осуществлять автоматическую подачу вещества на место возгорания.
Задачей предлагаемого изобретения является: обеспечение одновременного эффективного многофакторного контроля защищаемого объекта на предмет пожарной опасности и определения координат места возникновения пожара.
Технический результат должен заключаться в появлении у способа обнаружения пожара дополнительной функциональной возможности, а именно: определять координаты места возникновения пожара.
Поставленная задача решается предлагаемым способом.
Предлагаемый способ характеризуется выполнением следующих этапов:
- выполняют модуль поиска пожара для определения координат пожара, при этом модуль формируют на основе извещателя пожарного аспирационного (ИПА), ко входу которого симультанно подключают электроуправляемый ИПА воздушный кран и дроссель воздушный, причем выход информационный ИПА соединяют с контроллером, выполненный со своими программным обеспечением по определению координат места расположения очага возгорания, кроме того выход контроллера соединяют с релейным модулем, который посредством «сухих» контактов имеет возможность передавать информацию в автоматическую установку тушения, причем электропитание извещателя ИПА, контроллера и релейного модуля обеспечивают посредством источника питания;
- выполняют две рядом расположенные воздуховодные ветки с одинаково выполненными парами воздухозаборных отверстий, подключенные через электроуправляемый воздушный кран и через воздушный дроссель к ИПА по трехмерно заданным координатам в защищаемом объекте осуществляют нумерацию отверстий в порядке возрастания по мере отдаления от входа в ИПА, внося в память контроллера, выполненный информационно связанным с ИПА, порядок и координаты расположения отверстий;
- управляют воздушным краном посредством штатного микроконтроллера извещателя;
- осуществляют в ручном режиме настройку скорости транспортировки газовоздушной смеси во второй воздуховодной ветке при закрытом воздушном кране первой ветки, как минимальную скорость траспортировки газовоздушной смеси V2 аспирации, посредством регулирования проходного сечения воздушного дросселя и посредством регулирования оборотов вращения внутреннего вентилятора ИПА, каждое значение установленной скорости транспортировки, измеряемое на пути к извещателю от соответствующего отверстия, фиксируют в памяти контроллера, причем минимальную скорость транспортировки газовоздушной смеси V2 определяют программно контроллером как функцию по времени доставки проб газовоздушной смеси с факторами пожара;
- осуществляют в ручном режиме настройку скорости транспортировки газовоздушной смеси в первой воздуховодной ветке при полностью открытом воздушном кране посредством регулирования оборотов вращения вентилятора ИПА как максимальную скорость транспортировки газовоздушной смеси V1, определяемую программно контроллером, выполненным в составе модуля поиска пожара, как функцию по времени доставки пробы газовоздушной смеси с пожароопасным уровнем факторов пожара от каждого воздухозаборного отверстия до ИПА, значения максимальной скорости транспортировки фиксируют в памяти контроллера, дополнительно в этих же условиях измеряют скорость V3 транспортировки воздуха во второй воздуховодной ветке от каждого воздухозаборного отверстия до ИПА как функцию по времени доставки проб газовоздушной смеси с пожароопасным уровнем факторов пожара от каждого воздухозаборного отверстия до ИПА, кроме того, при ручном режиме настройки скорости транспортировки газовоздушной смеси, обеспечивают превышение максимальной скорости транспортировки газовоздушной смеси над минимальной скоростью транспортировки газовоздушной смеси на величину, по меньшей мере, равную максимально допустимой погрешности измерения скорости;
- контролируют, во время дежурного режима работы ИПА и при открытом воздушном кране, состояние ИПА на предмет его срабатывания во время аспирации по обеим веткам;
- запускают, в случае срабатывания ИПА, выдавшего первый сигнал о пожаре, таймер контроллера, одновременно по команде штатного микроконтроллера ИПА закрывают воздушный кран, прекращая аспирацию по первой ветке;
- контролируют посредством микроконтроллера ИПА режим работы на минимальной скорости транспортировки газовоздушной смеси V2;
- контролируют повторное срабатывание ИПА, получающего информацию о факторах контролируемого процесса, поступающих с минимальной скоростью транспортировки газовоздушной смеси V2 по второй ветке;
- останавливают при получении второго сигнала о пожара, посредством контроллера работу своего таймера, и на основании показаний таймера, с учетом ранее записанных в памяти контроллера значений минимальной скорости транспортировки газовоздушной смеси от каждого заборного отверстия второй ветки, с учетом заданных координат пронумерованных воздухозаборных отверстий, определяют программно, посредствам контроллера по формуле L=t*V3*V2/V1-V3 координаты воздухозаборного отверстия, вблизи которого произошел пожар, где L(м) - длина воздуховода первой (или второй) ветки от конца ветки до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара;
- t(c) - длительность промежутка времени, зафиксированная таймером между моментами появлений сигналов о пожаре, поступающих: сначала по первой ветке, а затем по второй ветке;
- V1 (м/с) - значение максимальной скорости транспортировки газовоздушной смеси в первой ветке;
- V2 (м/с) - значение минимальной скорости транспортировки газовоздушной смеси по второй, определяемое при закрытом состоянии крана в первой ветке;
- V3 (м/с) - значение скорости транспортировки газовоздушной смеси во второй ветке до появления первого сигнала о пожаре;
- обеспечивают посредством контроллера адресную индикацию номера воздухозаборного отверстия, возле которого обнаружен пожар, на цифровом индикаторе контроллера.
Для осуществления способа при настройке, тестировании и испытаниях на ИПА используют дистанционно управляемый диспенсер («электронную сигарету» - устройство для кратковременной подачи тестового аэрозоля).
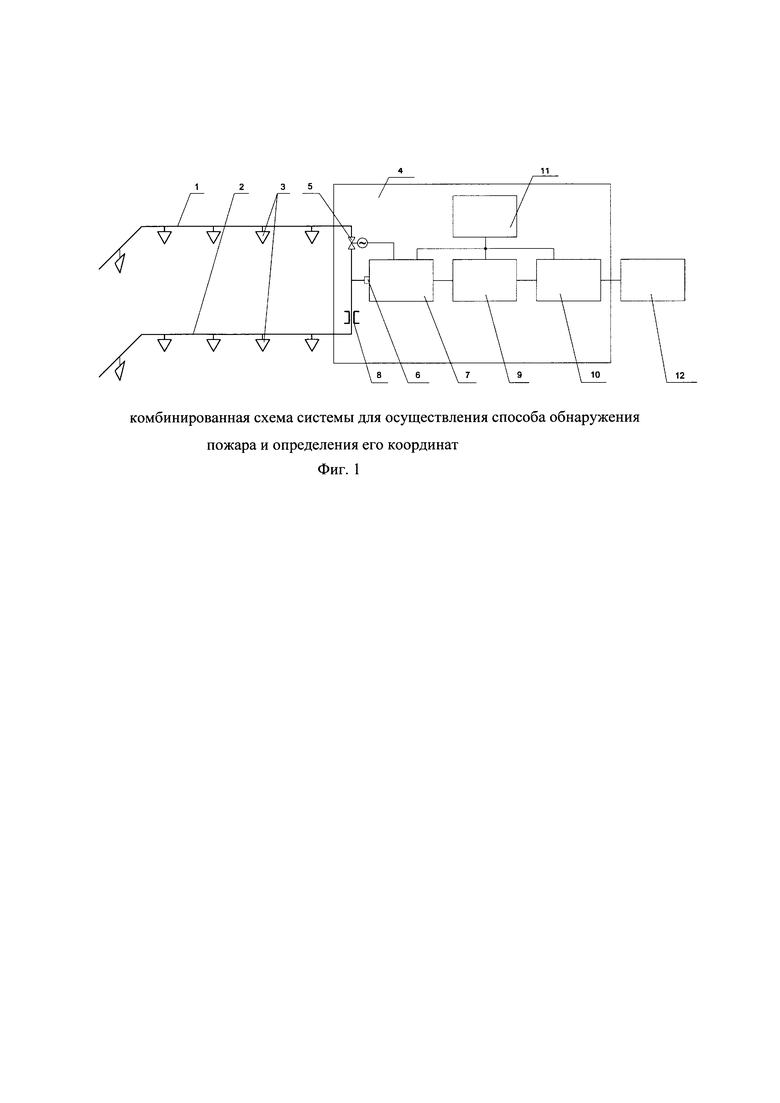
Более подробно осуществление способа показано на комбинированной схеме системы, с помощью которой осуществлен способ.
Фиг. 1 - комбинированная схема системы для осуществления способа обнаружения пожара и определения его координат.
Способ обеспечивается выполнением двух параллельных и полностью идентичных рядом расположенных воздуховодных веток 1, 2 с одинаковыми парами 3 воздухозаборных отверстий, обе ветки соединены с модулем поиска пожара 4, в котором первая ветвь 1 через электроуправляемый (воздушный) кран 5 подключена ко входу 6 извещателя пожарного аспирационного 7, вторая ветвь 2 подключена симультанно к этому же входу через регулируемый дроссель 8; причем ИПА 7 посредством контроллера 9 выполненный со своим программным обеспчение, соединенный с модулем релейным 10, выполненный с «сухими» контактами; ИПА, контроллер и релейный модуль питаемы от блока питания 11, модуль релейный связан с автоматической системой пожаротушения 12 посредством «сухих» контактов.
Осуществляется способ следующим образом.
В дежурном режиме работы в извещатель 7 одновременно поступает контролируемая на предмет пожарной опасности газовоздушная смесь из защищаемого объекта по двум воздуховодным веткам 1 и 2, при этом скорость транспортировки газовоздушной смеси V1 по ветке 1 задана более высокая, чем скорость транспортировки газовоздушной смеси V3 по ветке 2, поэтому первый сигнал о пожаре формируется ИПА при поступлении смеси, содержащей факторы контролируемого процесс А (пожара), из первой ветки. При поступлении факторов, свидетельствующих о пожаре, извещатель формирует сигнал «Пожар 1», по этому сигналу микроконтроллер ИПА, отправляет команду на закрытие крана 5 и одновременно запускает таймер контроллера 9, предварительно зафиксировав в своей памяти максимальную скорость транспортировки газовоздушной смеси V1, которая была определена на этапе предварительной настройки; во второй ветке предварительно определена и зафиксирована контроллером скорость транспортировки газовоздушной смеси V3, при условии наличия открытого крана в первой ветке, кроме того до этого момента предварительно была определена минимальная скорость транспортировки газовоздушной смеси V2 при закрытом кране в первой ветке, значения скоростей транспортировки проб V2 и V3 от каждого отверстия зафиксированы в памяти контроллера. После закрытия крана газовоздушная смесь со скоростью V2 поступает в камеру измерений ИПА только из второй ветки.
При поступлении по второй ветке повторной порции газовоздушной смеси с факторами, свидетельствующими о пожаре, контроллер останавливает таймер. На основе показаний таймера, с учетом значений минимальной скорости транспортировки газовоздушной смеси, зафиксированной во время предварительной настройки аспирации, с учетом заданных координат воздухозаборных отверстий и номеров отверстий, заранее занесенных в память контроллера, программно определяют расстояние до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара, высвечивая номер отверстия на цифровом индикаторе контроллера.
Таким образом использование ИПА пожарного аспирационного вместе с элетроуправляемым краном, установленном на выходе первой воздуховодной ветки с воздухозаборными отверстиями и соединенным с входом ИПА, а также использование дросселя, установленного на выходе второй воздуховодной ветки с воздухозаборными отверстиями, выполненной рядом с первой веткой аналогично ей, выход которой также соединен со входом ИПА, дают возможность, при выполнении предварительной настройки скоростных режимов транспортировки газовоздушной смеси в ветках, программно осуществлять многофакторный контроль процесса с помощью ИПА известным способом и по-новому, с помощью модуля поиска пожара с программным обеспечением, обнаруживать место расположения очага возгорания и определять координаты возникающего пожара, передавать сигналы о пожаре и информацию о месте пожара в автоматическую систему пожаротушения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И МЕСТА ЕГО ВОЗНИКНОВЕНИЯ И СИСТЕМА ПО ОСУЩЕСТВЛЕНИЮ СПОСОБА | 2020 |
|
RU2759480C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ОПРЕДЕЛЕНИЯ ЕГО КООРДИНАТ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2775498C1 |
| СПОСОБ БОРЬБЫ С ПОЖАРНОЙ ОПАСНОСТЬЮ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2777212C1 |
| СПОСОБ БОРЬБЫ С ПОЖАРНОЙ ОПАСНОСТЬЮ И МОДУЛЬ АДРЕСНЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2021 |
|
RU2777012C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБИТАЕМЫХ ОБЪЕКТОВ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2748633C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБИТАЕМЫХ ОБЪЕКТОВ И КОМБИНИРОВАННЫЙ СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2751424C1 |
| СПОСОБ КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2824471C1 |
| СПОСОБ МНОГОФАКТОРНОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2692926C1 |
| СИСТЕМА И СПОСОБЫ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2730962C1 |
| ИЗВЕЩАТЕЛЬ ПОЖАРНЫЙ АСПИРАЦИОННЫЙ | 2016 |
|
RU2639050C1 |
Способ обнаружения пожара и определения его координат относится к многофакторному мониторингу за пожарной опасностью извещателем пожарным аспирационным, содержащим контроллер с двумя воздуховодными ветками, с воздухозаборными отверстиями в них, одинаково выполненными и расположенными рядом друг с другом. Одна ветка снабжена краном воздушным электроуправляемым, установленным на выходе из первой ветки; вторая ветка снабжена регулируемым дросселем, установленным на выходе второй ветки. Посредством предварительной настройки обеспечена разноскоростная транспортировка контролируемой газовоздушной смеси по веткам. По длительности задержки сигналов о пожаре, возникающих между появлением первого сигнала, пришедшего по более скоростному каналу, и появлением второго сигнала, пришедшего по менее скоростному каналу, посредством программы, заложенной в контроллере, определяют возгорание и координаты места его возникновения. 1 з.п. ф-лы, 1 ил.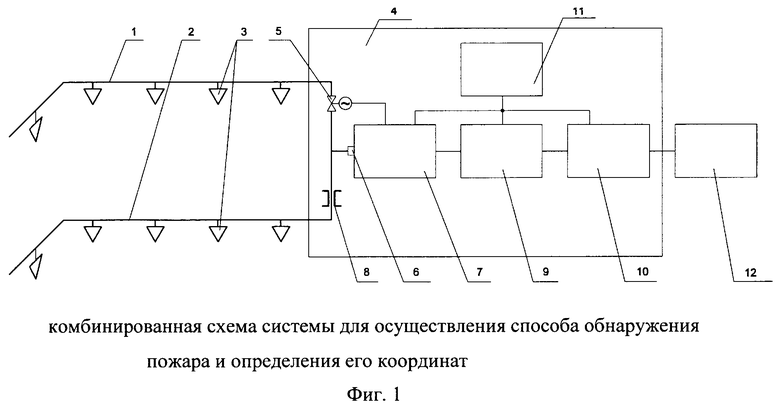
1. Способ обнаружения пожара и определения его координат, характеризующийся тем, что выполняют следующие этапы:
- выполняют модуль поиска пожара для определения координат возгорания, при этом модуль формируют на основе извещателя пожарного аспирационного (ИПА), ко входу которого симультанно подключают электроуправляемый ИПА, воздушный кран и дроссель воздушный, причем выход информационный ИПА соединяют с контроллером, выполненным со своим программным обеспечением по определению координат места расположения очага возгорания, кроме того, выход контроллера соединяют с релейным модулем, который посредством «сухих» контактов имеет возможность передавать информацию в автоматическую установку тушения, причем электропитание ИПА, контроллера и релейного модуля обеспечивают посредством источника питания;
- выполняют две рядом расположенные воздуховодные ветки с одинаково выполненными парами воздухозаборных отверстий, подключенные через электроуправляемый воздушный кран и через воздушный дроссель к ИПА по трехмерно заданным координатам в защищаемом объекте, осуществляют нумерацию отверстий в порядке возрастания по мере отдаления от входа в ИПА, внося в память контроллера, выполненного информационно связанным с ИПА, порядок и координаты расположения отверстий;
- управляют воздушным краном посредством штатного микроконтроллера ИПА;
- осуществляют в ручном режиме настройку скорости транспортировки газовоздушной смеси во второй воздуховодной ветке при закрытом воздушном кране первой ветки как минимальную скорость траспортировки газовоздушной смеси V2 аспирации, посредством регулирования проходного сечения воздушного дросселя и посредством регулирования оборотов вращения внутреннего вентилятора ИПА, каждое значение установленной скорости транспортировки, измеряемое на пути к ИПА от соответствующего отверстия, фиксируют в памяти контроллера, причем минимальную скорость транспортировки газовоздушной смеси V2 определяют программно контроллером как функцию по времени доставки проб газовоздушной смеси с факторами пожара;
- осуществляют в ручном режиме настройку скорости транспортировки газовоздушной смеси в первой воздуховодной ветке при полностью открытом воздушном кране посредством регулирования оборотов вращения вентилятора ИПА как максимальную скорость транспортировки газовоздушной смеси V1, определяемую программно контроллером, выполненным в составе модуля поиска пожара, как функцию по времени доставки пробы газовоздушной смеси с пожароопасным уровнем факторов пожара от каждого воздухозаборного отверстия до ИПА, значения максимальной скорости транспортировки фиксируют в памяти контроллера, дополнительно в этих же условиях измеряют скорость V3 транспортировки воздуха во второй воздуховодной ветке от каждого воздухозаборного отверстия до ИПА как функцию по времени доставки проб газовоздушной смеси с пожароопасным уровнем факторов пожара от каждого воздухозаборного отверстия до ИПА, кроме того, при ручном режиме настройки скорости транспортировки газовоздушной смеси обеспечивают превышение максимальной скорости транспортировки газовоздушной смеси над минимальной скоростью транспортировки газовоздушной смеси на величину, по меньшей мере, равную максимально допустимой погрешности измерения скорости:
- контролируют во время дежурного режима работы ИПА и при открытом воздушном кране состояние ИПА на предмет его срабатывания во время аспирации по обеим веткам;
- запускают в случае срабатывания ИПА, выдавшего первый сигнал о пожаре, таймер контроллера, одновременно по команде штатного микроконтроллера ИПА закрывают воздушный кран, прекращая аспирацию по первой ветке;
- контролируют посредством микроконтроллера ИПА режим работы на минимальной скорости транспортировки газовоздушной смеси V2;
- контролируют повторное срабатывание ИПА, получающего информацию о факторах контролируемого процесса, поступающих с минимальной скоростью транспортировки газовоздушной смеси V2 по второй ветке;
- останавливают при получении второго сигнала о пожаре посредством контроллера работу своего таймера, и на основании показаний таймера, с учетом ранее записанных в памяти контроллера значений минимальной скорости транспортировки газовоздушной смеси от каждого заборного отверстия второй ветки, с учетом заданных координат пронумерованных воздухозаборных отверстий определяют программно посредством контроллера по формуле L=t*V3*V2/V1-V3 координаты воздухозаборного отверстия, вблизи которого произошел пожар, где L(м) - длина воздуховода первой (или второй) ветки от конца ветки до воздухозаборного отверстия, наиболее близко расположенного к обнаруженному месту пожара;
- t(c) - длительность промежутка времени, зафиксированная таймером между моментами появлений сигналов о пожаре, поступающих: сначала по первой ветке, а затем по второй ветке;
- V1 (м/с) - значение максимальной скорости транспортировки газовоздушной смеси в первой ветке;
- V2 (м/с) - значение минимальной скорости транспортировки газовоздушной смеси по второй ветке, определяемое при закрытом состоянии крана в первой ветке;
- V3 (м/с) - значение скорости транспортировки газовоздушной смеси во второй ветке до появления первого сигнала о пожаре;
- обеспечивают посредством контроллера адресную индикацию номера воздухозаборного отверстия, возле которого обнаружен пожар, на цифровом индикаторе контроллера.
2. Способ обнаружения пожара и определения его координат по п. 1, отличающийся тем, что для осуществления способа при настройке, тестировании и испытаниях на срабатывание ИПА используют дистанционно управляемый диспенсер.
| СПОСОБ ОБНАРУЖЕНИЯ ПОЖАРА И ИНТЕЛЛЕКТУАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2344859C2 |
| ИЗВЕЩАТЕЛЬ ПОЖАРНЫЙ АСПИРАЦИОННЫЙ | 2016 |
|
RU2639050C1 |
| WO 2014059479 A1, 24.04.2014 | |||
| JP 4012764 A, 17.01.1992. | |||

