Изобретение относится к сельскохозяйственному машиностроению, в частности к оборудованию для круглогодичных ускоренных испытаний сельскохозяйственный машин, орудий и их рабочих органов в лабораторных условиях, и может быть использовано для отработки технологических режимов использования вычесывающего органа почвообрабатывающей машины и оценки его кинематических параметров.
Известно изобретение, принятое в качестве прототипа [патент СССР на изобретение №960569 опубл. 23.09.1982, бюл. №35], заключающееся в том, что с целью расширения диапазона испытаний на склонах и сокращения затрат времени на их проведение, направляющие смонтированы на тележке посредством оси, которая параллельна направлению движения, и снабжена механизмом их поворота.
К числу недостатков известного изобретения следует отнести сложность конструкции, ее значительную металлоемкость, необходимость автономного источника механической энергии (а именно, двигателя внутреннего сгорания), наличие гидростанции для привода исполнительных механизмов, почвенного канала. Помимо этого, изобретение отличается низкой информативностью, достоверностью и номенклатурой в части определения кинематических и технологических параметров, исследуемых рабочих органов, почвообрабатывающих машин.
Целью изобретения - является повышение точности, достоверности, однозначности, повторяемости и уменьшения трудоемкости испытания рабочих органов почвообрабатывающих машин, преимущественно вычесывающего органа почвообрабатывающей машины.
Указанная цель достигается тем, что согласно изобретению, способ испытания рабочих органов почвообрабатывающих машин, преимущественно вычесывающего органа заключается в том, что, испытания проводят в лабораторных условиях без использования почвенного канала, с помощью электромеханического привода осуществляют вращение рабочего органа, при этом подают в зону действия рабочего органа контейнер с образцами почвы с реальными некультурными растениями, причем контейнер с почвой, соответствующего профилю, твердости и морфологии почвы реального культурного поля, при этом с помощью датчиков, расположенных на рабочем органе регистрируют: глубину обработки почвы, частоту вращения рабочего органа, угол входа рабочего органа в почву, нагрузку на рабочий орган, энергетические затраты на обработку почвы, а с помощью высокоскоростных видеокамер определяют степень дробления почвы после обработки, чистоту почвы от некультурных растений, скорость и дальность, траекторию полета некультурных растений, после чего данные с датчиков и высокоскоростных камер передаются в ПЭВМ, где производится расчет параметров работы рабочего органа и качество обработки почвы.
Способ реализуется следующим образом.
В зону вращающегося рабочего органа почвообрабатывающей машины, преимущественно вычесывающего органа, подают контейнер. В контейнере находится образец почвы, соответствующий профилю, твердости и морфологии почвы реального культурного поля. При этом, в образце почвы находятся некультурные растения с необходимой дискретностью и плотностью высева. Габаритные размеры контейнера определяются исходя из условий и программы испытания рабочего органа почвообрабатывающей машины. Контейнер с почвой и некультурными растениями перемещается вместе с полотном металлической ленты транспортера. Для определения кинематических параметров рабочего органа, а именно для определения глубины обработки почвы используется трансформаторный датчик перемещения, размещенный непосредственно на рабочем органе. Частота вращения рабочего органа регистрируется с помощью бесконтактного датчика частоты вращения. Угол входа в почву вычесывающего органа почвообрабатывающей машины определяется цифровым прецизионным датчиком угла наклона. Нагрузка на рабочий орган определяется тензодатчиками, размещенными непосредственно в рабочем органе. Энергетические затраты, связанные с обработкой почвы оцениваются, датчиком крутящего момента, установленном на приводе вычесывающего рабочего органа почвообрабатывающей машины. Качество обработки почвы и кинематические параметры перемещения некультурных растений при обработке почвы, регистрируют с помощью высокоскоростных видеокамер. Данные, полученные с помощью датчиков и высокоскоростных камер, обрабатываются в ПЭВМ и представляются в удобном для пользователя виде.
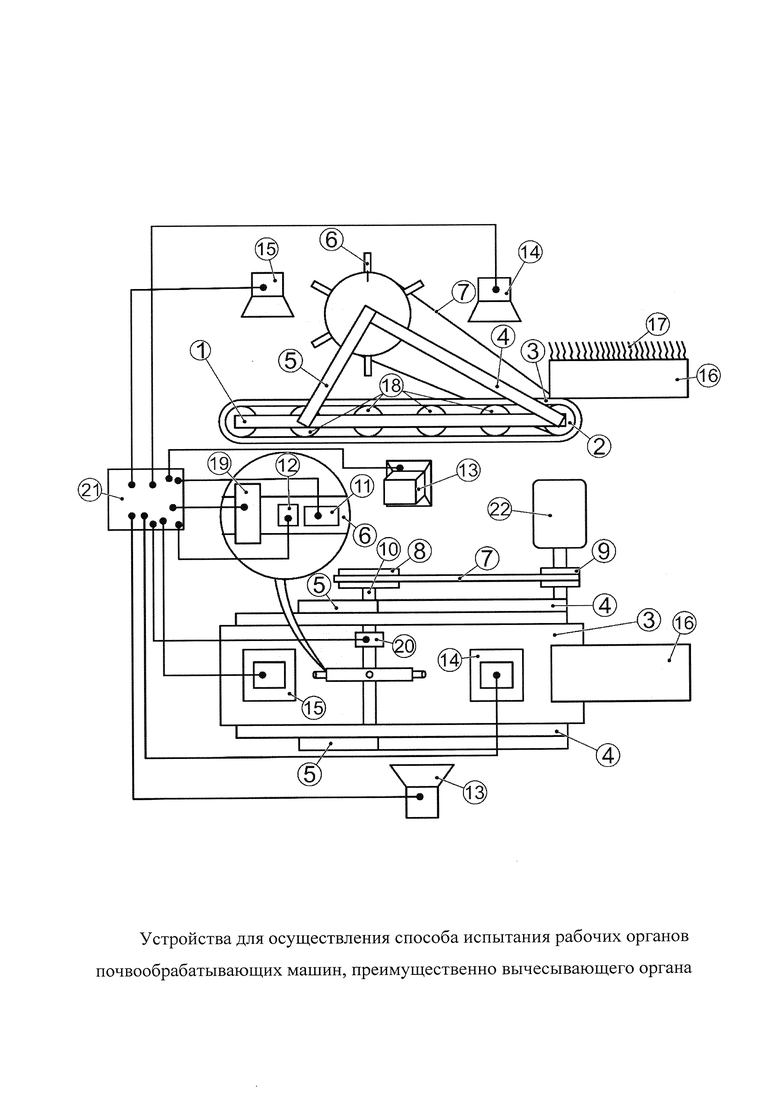
Техническая суть изобретения поясняется иллюстрацией (фиг.), на которой приведена конструкция устройства для осуществления способа испытания рабочих органов почвообрабатывающих машин, преимущественно вычесывающего органа.
На чертеже приняты следующие обозначения:
1 - рама; 2 - приводной барабан; 3 - полотно металлической ленты; 4 - стойка; 5 - винтовая опора; 6 - рабочий орган; 7 - цепной привод; 8 - вариатор; 9 - шкив; 10 - датчик крутящего момента; 11 - тензодатчик; 12 - цифровой прецизионный датчик угла наклона; 13 - фронтальная высокоскоростная видеокамера; 14 - верхняя высокоскоростная видеокамера; 15 - верхняя высокоскоростная видеокамера; 16 - контейнер с почвой; 17 - некультурные растения; 18 - поддерживающие ролики; 19 - трансформаторный датчик перемещения; 20 - бесконтактный датчика частоты вращения рабочего органа; 21 - персональная ЭВМ; 22 - электродвигатель переменного тока.
Конструкция предлагаемого устройства для осуществления способа состоит из рамы 1, на которой расположены приводной барабан 2 для перемещения полотна металлической ленты 3 с контейнером 16 с почвой и некультурными растениями. Стойки 4 предназначены для установки рабочего органа 6 и размещения элементов привода рабочего органа 6. Винтовые опоры 5 крепятся к стойке 4 и предназначены для изменения угла входа рабочего органа в почву контейнера 16. Привод барабана 2 осуществляется от электродвигателя переменного тока 22. Вращение рабочего органа 6 осуществляется посредствам цепного привода 7, через шкив 9 и вариатор 8. Причем вариатор 8 предназначен для плавного бесступенчатого изменения частоты вращения рабочего органа 6. Измерение энергетических затрат, а именно крутящего момента рабочего органа 6, осуществляется датчиком крутящего момента 10 установленным на валу рабочего органа 6. Данные с датчика крутящего момента 10 поступают в ПЭВМ 21, обрабатываются и представляются в удобном для пользователя виде. На теле рабочего органа 6 установлены: тензодатчик 11, предназначенный для определения нагрузки на рабочий орган; цифровой прецизионный датчик угла наклона 12 предназначенный для определения угла входа рабочего органа в почву контейнера 16. Датчики 11 и 12 посредствам беспроводного соединения транслируют данные в ПЭВМ 21, где производится их обработка. Трансформаторный датчик перемещения 19 расположен на стержне вычесывающего рабочего органа 6 с возможностью свободного перемещения вдоль стержня, что позволяет определять глубину обработки почвы. Датчик 19 связан с ПЭВМ 21 беспроводным каналом связи, для трансляции данных о глубине обработки почвы в режиме реального времени. Частота вращения рабочего органа определяется бесконтактным датчиком частоты вращения 20 расположенным на стойке 4. Данные с датчика 4 передаются на ПЭВМ 21. Высокосортные видеокамеры 13 и 14 предназначены для определения скорости, дальности и траектории полета некультурных растений 17 из контейнера 16. Сформированный с видеокамер сигнал поступает в ПЭВМ 21 для последующей обработки с помощью программного обеспечения. Высокоскоростная камера 15 предназначена для оценки качества обработки степени дробления почвы. Сигнал с видеокамеры 15 передается на ПЭВМ 21 с последующей его обработкой.
В результате патентного поиска не выявлено изобретательских решений, идентичных заявляемому, что соответствует критерию «новизна».
Новая совокупность признаков способа и устройства для его реализации, подтверждает причинно-следственную связь новой совокупности признаков и достигнутого результата, которые не были известны из уровня техники до создания настоящего изобретения, что позволяет сделать вывод о соответствии изобретательского решения по критерию «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Почвообрабатывающее орудие для сплошной обработки почвы | 2021 |
|
RU2780057C1 |
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2007 |
|
RU2353080C1 |
| ПОЛЕВАЯ УСТАНОВКА ДЛЯ ИСПЫТАНИЙ ПОЧВООБРАБАТЫВАЮЩИХ РАБОЧИХ ОРГАНОВ | 2010 |
|
RU2436270C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2001 |
|
RU2186472C1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2007 |
|
RU2352091C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РАБОЧИХ ОРГАНОВ МЕЛИОРАТИВНЫХ И ЗЕМЛЕРОЙНЫХ МАШИН | 2005 |
|
RU2278368C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ НА АБРАЗИВНЫЙ ИЗНОС РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН | 2016 |
|
RU2649241C1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399179C1 |
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2009 |
|
RU2419269C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ И СТЕПЕНИ ИЗНОСА ПОЧВООБРАБАТЫВАЮЩИХ РАБОЧИХ ОРГАНОВ | 1995 |
|
RU2105280C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к оборудованию для круглогодичных ускоренных испытаний рабочих органов сельскохозяйственных машин в лабораторных условиях. Способ испытания рабочих органов (РО) почвообрабатывающих машин, преимущественно вычесывающего органа, заключается в том, что c помощью электромеханического привода осуществляют вращение рабочего органа (6). В зону действия РО подают контейнер (16) с образцами почвы с некультурными растениями (17). С помощью датчиков (19, 20, 12, 11, 10), расположенных на РО регистрируют: глубину обработки почвы, частоту вращения РО, угол входа РО в почву, нагрузку на РО, энергетические затраты на обработку почвы. С помощью высокоскоростных видеокамер (15, 13, 14) определяют степень дробления почвы после обработки, чистоту почвы от некультурных растений, скорость и дальность, траекторию полета некультурных растений. Обработка данных с датчиков и высокоскоростных камер производится в персональной ЭВМ (21). Технический результат - повышение точности, достоверности, однозначности, повторяемости и уменьшение трудоемкости испытания рабочих органов почвообрабатывающих машин. 2 н.п. ф-лы, 1 ил.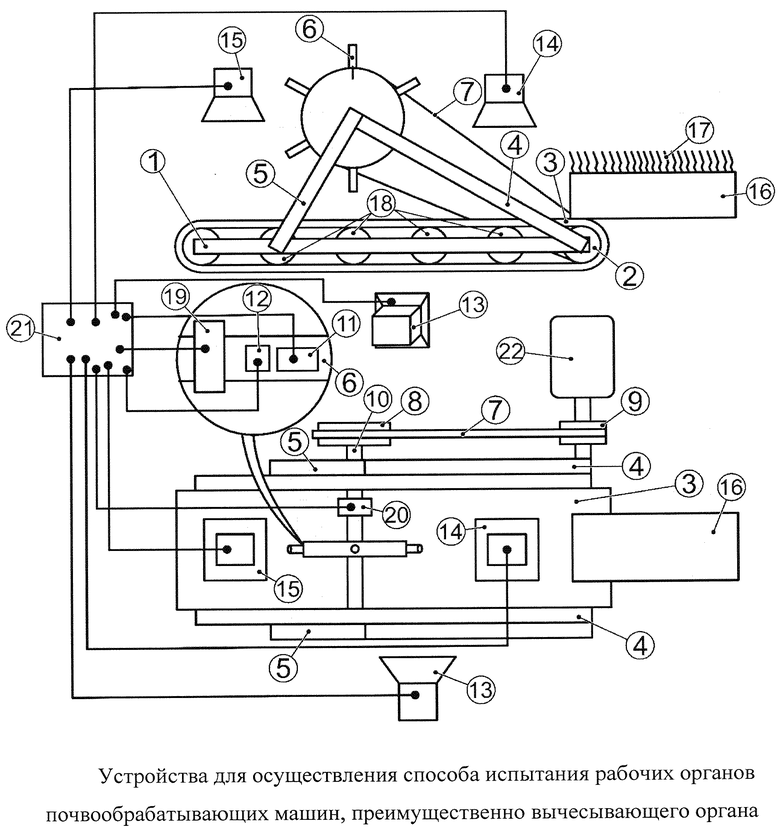
1. Способ испытания рабочих органов почвообрабатывающих машин, преимущественно вычесывающего органа, заключающийся в том, что испытания проводят в лабораторных условиях, с помощью электромеханического привода осуществляют вращение рабочего органа, при этом подают в зону действия рабочего органа контейнер с образцами почвы с реальными некультурными растениями, причем контейнер с почвой, соответствующий профилю, твердости и морфологии почвы реального культурного поля, при этом с помощью датчиков, расположенных на рабочем органе, регистрируют: глубину обработки почвы, частоту вращения рабочего органа, угол входа рабочего органа в почву, нагрузку на рабочий орган, энергетические затраты на обработку почвы, а с помощью высокоскоростных видеокамер определяют степень дробления почвы после обработки, чистоту почвы от некультурных растений, скорость и дальность, траекторию полета некультурных растений, после чего данные с датчиков и высокоскоростных камер передают в ПЭВМ, где производят расчет параметров работы рабочего органа и качество обработки почвы.
2. Устройство для реализации способа испытания рабочих органов почвообрабатывающих машин, преимущественно вычесывающего органа по п. 1, отличающееся тем, что содержит раму, на которой расположены приводной барабан для перемещения полотна металлической ленты с контейнером с почвой и некультурными растениями, стойки для установки рабочего органа и размещения элементов привода рабочего органа, привод барабана осуществлен от электродвигателя переменного тока, а рабочий орган приводится во вращение посредствам цепного привода, через шкив и вариатор, измерение энергетических затрат, а именно крутящего момента рабочего органа, осуществляют датчиком крутящего момента, установленным на валу рабочего органа, данные с датчика крутящего момента поступают в персональную ЭВМ (ПЭВМ), обрабатываются и представляются в удобном для пользователя виде, на теле рабочего органа установлены: тензодатчик, цифровой прецизионный датчик угла наклона, причем тензодатчики и прецизионный датчик угла наклона посредствам беспроводного соединения транслируют данные в ПЭВМ, где производится их обработка, трансформаторный датчик перемещения расположен на стержне вычесывающего рабочего органа с возможностью его свободного перемещения вдоль рабочего органа, при этом трансформаторный датчик перемещения связан с ПЭВМ беспроводным каналом связи, для трансляции данных о глубине обработки почвы в режиме реального времени, датчик частоты вращения рабочего органа расположен на стойке, при этом данные с датчика частоты передаются на ПЭВМ, фронтальная и боковая высокоскоростные видеокамеры, установленные в зоне рабочего органа, транслируют видеосигнал в ПЭВМ для последующей обработки с помощью программного обеспечения.
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ФОТОКОПИРОВАЛЬНЫМИ РАБОТАМИ | 0 |
|
SU192600A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН, ПРЕДПОЧТИТЕЛЬНО ГЛУБОКОРЫХЛИТЕЛЕЙ И ЩЕЛЕРЕЗОВ | 2005 |
|
RU2279050C1 |
| Стенд для проведения испытаний рабочих органов сельскохозяйственных машин | 1991 |
|
SU1783349A1 |
| CN 210154789 U, 17.03.2020 | |||
| CN 208026252 U, 30.10.2018. | |||

