ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к планетарным механизмам изменения крутящего момента и, в частности, к планетарному редуктору с сателлитами в виде роликов с наружной резьбой.
УРОВЕНЬ ТЕХНИКИ
Известно применение планетарных редукторов для вращения шарниров промышленных манипуляторов (далее - манипулятор). Одно звено манипулятора прикреплено к выходному звену планетарного редуктора, а второе звено манипулятора прикреплено к корпусу редуктора. При вращении входного звена планетарного редуктора с помощью, например, электрического мотора, вал которого соединен с входным звеном редуктора, а корпус которого закреплен на втором звене манипулятора, происходит вращение выходного звена относительно корпуса планетарного редуктора. При этом скорость вращения выходного звена и крутящий момент на выходном звене отличаются от скорости вращения входного звена и крутящего момента на входном звене планетарного редуктора. Таким образом, достигается перемещение звеньев манипулятора относительно друг друга. Манипулятор может иметь несколько звеньев и соответственно несколько шарниров для перемещения звеньев относительно друг друга. Манипуляторы используются для автоматизации технологических процессов, например, перемещения кузовных панелей автомобильных кузовов при их сборке или перемещения грузов при их сортировке и упаковке. Эти и подобные применения подразумевают круглосуточную работу в циклическом режиме. Циклический режим подразумевает изменение направления вращения редукторов в шарнирах манипулятора. При этом за каждый цикл перемещения манипулятор несколько раз начинает движение и несколько раз останавливается. Для увеличения производительности начало и окончание движения должны происходить с высокими ускорениями, что в паре с полезной нагрузкой на манипуляторе приводит к возникновению большой перегрузки по крутящему моменту на каждом шарнире манипулятора. Следует отметить, что при вводе в эксплуатацию манипулятора и отладке его программы перемещения возможно столкновение звеньев манипулятора с другим оборудованием производственной линии, что вызывает ударные нагрузки на редукторы в шарнирах манипулятора. С учетом роста степени автоматизации увеличивается и количество оборудования для автоматизации технологических процессов, которое может быть расположено в непосредственной близости к манипулятору. Важно, чтобы при подобных аварийных ситуациях не происходил выход редуктора из строя для исключения длительного восстановления манипулятора.
Для обеспечения высокой производительности производственной линии предпочтительно иметь увеличенный интервал технического обслуживания манипулятора, в регламент которого входит замена смазочного материала, которым смазываются рабочие поверхности механизма редукторов.
В патентном документе US 10352400 B2, опубл. 16.07.2019, описан планетарный редуктор, в котором выходное звено представлено двумя фланцами с отверстиями в которых располагаются подшипниковые опоры. В подшипниковых опорах установлены сателлиты, зубчатые венцы которых сопрягаются с зубчатым венцом коронного колеса, которое является корпусом редуктора. Вращаясь вокруг своей оси и совершая планетарное движение, сателлиты приводят в движение выходное звено. При этом зубчатые венцы сателлитов могут быть прямозубыми, косозубыми или шевронными.
Зубья применяемых в описанном редукторе зубчатых колес обычно имеют эвольвентный профиль боковой поверхности. Крутящий момент на зубчатом колесе создает окружное усилие, приложенное к боковой стороне зуба в месте контакта, и вызывающее изгибные напряжения, имеющие максимальное значение на поверхности зуба у его основания, что при длительной работе редуктора с ударными нагрузками и при превышении крутящего момента приводит к разрушению зуба и преждевременному выходу редуктора из строя. При вращении сателлитов и их обкатывании по зубчатому венцу корпуса редуктора, то есть совершения планетарного движения, пятно контакта зубьев, которое может быть представлено линией, перемещается по зубьям сателлита и зубчатого венца корпуса от их основания до вершины и в обратную сторону для обеспечения постоянства контакта по меньшей мере одной пары зубьев, что приводит к наличию больших изгибных напряжений в основании зуба, когда линия контакта находится в зоне вершины зуба. Обычно применяются зубья с малым углом профиля (обычно 20 градусов), что дополнительно увеличивает напряжения в основании зуба из-за его малой толщины у основания. Использование эвольвентного профиля также накладывает ограничения в снижении контактных напряжений в месте контакта зубьев из-за того, что профиль невозможно поменять, одновременно обеспечив постоянство контакта по меньшей мере одной пары зубьев зубчатых колес, для снижения контактных напряжений. Для снижения изгибных напряжений применяют косозубые зубчатые колеса вместо прямозубых. Это позволяет распределить нагрузку на большее количество зубьев и увеличить толщину зубьев. Тем не менее вид контакта в косозубой передаче остается линейным, перемещающимся от вершины к основанию и в обратную сторону. Также косозубые зубчатые колеса имеют угол наклона зубьев относительно оси колеса, что приводит к большей нагрузке, которая действует на каждый зуб по нормали к его боковой поверхности. Из вышесказанного следует, что существенным недостатком известного редуктора является пониженная стойкость к ударным нагрузкам и перегрузкам по моменту выходного звена редуктора. Важно отметить, что зубчатое зацепление подразумевает выход и вход каждого зуба из зацепления при вращении колес относительно друг друга, что повышает шумность и снижает плавность вращения шарнира манипулятора.
При переходе с прямозубых на косозубые зубчатые колеса с условием сохранения передаточного отношения редуктора требуется увеличить диаметр колеса для размещения изначального количества зубьев, что приводит к увеличению размеров и массы редуктора. При сохранении размеров редуктора требуется уменьшить количество зубьев на колесе, что приведет к изменению передаточного отношения и изменению крутящего момента на выходном или входном звене. Следовательно, невозможно повысить изгибную прочность зубьев без увеличения габаритов с одновременным сохранением передаточного отношения редуктора.
Для обеспечения стойкости редуктора к циклическим перегрузкам по крутящему моменту, приложенному к выходному звену редуктора при изменении направления перемещения звена манипулятора, требуется увеличить стойкость зуба к циклическим нагрузкам с различным направлением действия. Для этого следует увеличить толщину зуба. Увеличение толщины зуба приводит к увеличению модуля зубчатого колеса, что в свою очередь при сохранении передаточного отношения редуктора требует увеличения диаметра сателлитов и корпуса из-за невозможности размещения малого количества зубьев на сателлите с обеспечением стойкости редуктора к ударным нагрузкам и перегрузкам на выходном звене, о чем будет сказано далее. Увеличение размера также приводит к увеличению массы редуктора, что увеличивает нагрузку на все шарниры манипулятора, которые находятся ближе к основанию манипулятора, чем шарнир, в котором установлен известный редуктор.
Отдельно следует отметить, что для увеличения крутящего момента на выходном звене такого редуктора требуется увеличить его передаточное отношение. При увеличении передаточного отношения требуется обеспечить увеличение разницы между количеством зубьев на сателлите и коронном колесе. При неизменном размере редуктора для этого требуется уменьшить количество зубьев на сателлите. Нарезание малого количества зубьев на сателлите или любом другом зубчатом колесе приводит к подрезанию, при котором срезается часть профиля зуба, что приводит к уменьшению торцевого перекрытия и появлению зазора между зубьями колес. Зазор вызывает соударение колес при контакте их зубьев, что приводит к вибрации. Уменьшение перекрытия приводит к повышению давления в контакте зубьев, как следствие снижению стойкости редуктора к ударным нагрузкам и перегрузкам, что приводит к его преждевременному выходу из строя. Для того, чтобы избежать вышеуказанные недостатки и сохранить размеры и массу редуктора, возможно уменьшить модуль зубчатых колес, что приводит к уменьшению размера зуба и позволяет увеличить количество зубьев на сателлите. Однако при уменьшении размеров зуба уменьшается и толщина его основания, что приводит к снижению его способности противодействовать изгибающим нагрузкам, возникающим при воздействии ударных нагрузок на выходное звено, что приводит к разрушению зубьев и преждевременному выходу редуктора из строя. Выход редуктора из строя вызывает простой производственной линии на время замены или ремонта редуктора в шарнире манипулятора. Таким образом, существенным недостатком известного редуктора является ограниченный диапазон передаточных отношений.
В известном редукторе сателлит содержит два зубчатых венца, один из которых находится в зацеплении с зубчатым венцом коронного колеса, а второй зубчатый венец находится в зацеплении с солнечным колесом. К особенностям редукторов с зубчатым зацеплением относится и то, что количество сателлитов для собираемости редуктора должно быть кратно количеству зубьев на коронном колесе и количеству зубьев на солнечном колесе, что ограничивает количество сателлитов и не позволяет разместить в редукторе то количество сателлитов, которое помещается с условием наличия между ними зазора для возможности свободного вращения, а значит снижается максимальный крутящий момент, который возможно приложить к выходному звену.
Для увеличения стойкости планетарного редуктора с зубчатым зацеплением к ударным нагрузкам и перегрузкам по моменту применяют увеличение ширины зубчатых венцов, но при этом по мере увеличения ширины зубчатых венцов снижается эффективность этой меры, а по достижении определенной ширины наблюдается обратный эффект, из-за неравномерности нагружения зуба по его длине из-за линейного контакта и высокой жесткости зуба, что приводит к недостаточному нагружению одних участков и превышению допустимых напряжений на других участках зуба вдоль его длины, что приводит к разрушению зуба и выходу редуктора из строя.
Следует отметить, что в известной конструкции редуктора выходное звено представлено водилом, которое образовано двумя фланцами, которые расположены на расстоянии друг от друга, позволяющем разместить между ними зубчатые венцы сателлитов. Фланцы соединяются между собой для образования жесткой конструкции, чтобы избежать перекоса осей сателлитов при воздействии крутящего момента, приложенного к выходному звену. Очевидно, что для такого соединения требуется разместить между фланцами элементы, с помощью которых указанные фланцы будут соединены, например выступы на торцевой поверхности одного из фланцев, примыкающие к торцевой поверхности второго фланца. Далее фланцы могут быть сжаты при помощи крепежных элементов, например, винтов. Указанные выступы занимают объем между фланцами и сателлитами, которые равномерно распределены по окружности.
Редуктор, как правило, частично заполнен смазочным материалом, например, маслом, которое смазывает зубья передач и подшипники. Смазочный материал перемешивается и циркулирует по внутреннему объему редуктора при вращении сателлитов относительно водила и водила относительно корпуса, когда вращается входное звено, которое представлено в известном редукторе солнечным колесом. При этом в зонах между указанными выступами снижается поток смазочного материала в области подшипников, в которых установлены сателлиты, что вызвано малым углом наклона зубьев к оси сателлита в случае исполнения косозубых или шевронных зубчатых венцов на сателлитах. В случае применения прямозубых зубчатых венцов указанный поток смазочного материала практически отсутствует. Указанная особенность увеличивает нагрев смазочного материала в зонах контактов зубьев и в подшипниках, что приводит к его деградации, повышению износа при воздействии ударных нагрузок и перегрузок по крутящего моменту на выходном звене редуктора и выхода его из строя.
Также известен документ RU 2719091C1, опубл. 17.04.2020, в котором описан роликовинтовой редуктор (далее - РВР), который является разновидностью планетарных редукторов. Входное звено редуктора выполнено в виде винта с двумя участками наружной резьбы, имеющими противоположное направление. Вокруг винта расположено множество роликов, также имеющих два участка наружной резьбы противоположного направления. Резьбы указанных участков винта контактируют с соответствующими участками наружной резьбы множества роликов. В свою очередь один из участков резьбы на роликах и часть второго участка резьбы на роликах контактирует с двумя участками внутренней резьбы первого силового звена, которое является выходным звеном РВР. Часть второго участка резьбы на роликах контактирует с внутренней резьбой второго силового звена, которое выполняет функцию корпуса РВР. При вращении входного звена ролики совершают планетарное движение вокруг винта, прокатываясь по участкам наружной резьбы винта и участкам внутренней резьбы силовых звеньев РВР. За счет разницы количества заходов внутренних резьб первого и второго силовых звеньев достигается возникновение крутящего момента между ними, а также изменение крутящего момента и скорости вращения выходного звена редуктора относительно входного звена РВР.
Количество роликов в известном редукторе для обеспечения собираемости должно быть кратно разнице количества заходов внутренних резьб первого и второго силовых звеньев, что приводит к отсутствию возможности увеличения крутящего момента, который возможно приложить к выходному звену редуктора без изменения передаточного отношения.
В таком редукторе резьба имеет некоторый угол подъема относительно продольной оси его элементов, а также имеет форму профиля, которая подразумевает контакт двух резьб по наклонным относительно продольной оси деталей поверхностям, что приводит к возникновению радиального и осевого усилия при приложении крутящего момента к роликам, винту и силовым звеньям. При этом в конструкции отсутствуют конструктивные элементы, исключающие радиальное перемещение роликов в сторону винта, например, водило. Из вышесказанного следует, что при приложении крутящего момента к первому силовому звену ролики прижимаются к винту РВР, что приводит к необходимости прикладывать увеличенный крутящий момент к входному звену и, вследствие чего, увеличивает потери и уменьшает коэффициент полезного действия РВР. Важно отметить, что усилие, с которым прижимаются ролики к винту, увеличивается пропорционально увеличению крутящего момента, приложенного к выходному звену. Также, чем больше передаточное отношение РВР, тем меньший крутящий момент требуется приложить к входному звену при неизменном крутящем моменте на выходном звене. Это приводит к тому, что увеличивается доля крутящего момента на входном звене, затрачиваемая на противодействие крутящему моменту, возникающему из-за прижатия роликов к винту. При этом увеличенный крутящий момент на выходном звене приводит к увеличению нагрева электрического мотора, который может быть закреплен на корпусе РВР и использован для приведения в движение винта РВР, что также повышает нагрев РВР и смазочного материала в нем, увеличивая его деградацию. Отсутствие в известном РВР конструктивных элементов, исключающих радиальное перемещение роликов в сторону винта, например, водила приводит к тому, что при износе резьб происходит радиальное смещение ролика и изменение диаметров резьб, на которых ролики обкатываются по внутренним резьбам силовых звеньев и винту. В свою очередь изменение указанных диаметров приводит к изменению передаточного отношения редуктора из-за изменения количества оборотов ролика за один оборот винта.
Следует отметить, что в известном РВР ролик имеет участок резьбы, имеющий неизменный угол подъема резьбы на длине этого участка. При этом указанный участок резьбы контактирует одновременно с первым и вторым силовыми звеньями, которые, как было сказано, имеют разное количество заходов, а, следовательно, разный угол подъема при неизменном диаметре. Разница в угле подъема приводит к тому, что пятно контакта резьб ролика и одного из силовых звеньев не находится на прямой, проходящей через оси ролика и указанного силового звена в плоскости перпендикулярной оси редуктора, что приводит к возникновению дополнительного момента, действующего на ролик. Дополнительный момент в свою очередь является причиной возникновения проскальзывания, а значит и дополнительного трения скольжения в контакте между роликом и одним из силовых звеньев, угол подъема с которым у резьбы ролика не совпадает. Это приводит к дополнительному нагреву и износу при воздействии ударных нагрузок и перегрузок по крутящему моменту на выходном звене.
Таким образом, существенным недостатком известного РВР является пониженный коэффициент полезного действия, зависящий от передаточного отношения РВР и от величины крутящего момента на выходном звене. Указанный недостаток приводит к увеличению нагрузки на резьбы редуктора при неизменном крутящем моменте на выходном звене. Следовательно, увеличивается износ резьб, увеличиваются зазоры между резьбами, что приводит к появлению вибрации и шума, а также повышается нагрев РВР и электрического мотора при ударных нагрузках и перегрузках по крутящему моменту, возникающему на выходном звене редуктора при движении звеньев манипулятора в динамичном режиме работы, что является причиной преждевременного выхода из строя и простоя производственной линии.
Таким образом, задачей настоящего изобретения является разработка редуктора с повышенной стойкостью к ударным нагрузкам и перегрузке по крутящему моменту с сохранением размеров его составных элементов и повышением коэффициента полезного действия.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению предложен редуктор, содержащий корпус, который содержит по меньшей мере один участок внутренней резьбы или соединен с деталью без возможности вращения относительно друг друга, содержащей по меньшей мере один участок внутренней резьбы; по меньшей мере один сателлит, расположенный в корпусе, фиксируемый от осевого перемещения относительно корпуса и содержащий по меньшей мере один участок наружной резьбы, который находится в зацеплении с указанным по меньшей мере одним участком внутренней резьбы корпуса, причем ось вращения указанного по меньшей мере одного сателлита смещена от оси вращения корпуса, причем угол подъема указанного участка наружной резьбы и указанного участка внутренней резьбы равный, и их направления совпадают. Редуктор также содержит солнечное колесо, расположенное в корпусе и выполненное с возможностью приведения в движение указанного по меньшей мере одного сателлита, причем ось вращения указанного солнечного колеса совпадает с осью вращения корпуса, и водило, расположенное в корпусе и выполненное с возможностью вращения относительно корпуса, а указанный по меньшей мере один сателлит присоединен к водилу с возможностью вращения в подшипниковой опоре, установленной в водиле, причем ось вращения водила совпадает с осью вращения корпуса.
Достигаемые технические результаты заключаются в увеличении стойкости редуктора к ударным нагрузкам и перегрузкам по крутящему моменту, приложенному к выходному звену, увеличении диапазона передаточных чисел, увеличении плавности работы, повышении точности передаточного отношения, снижения степени изменения передаточного отношения на протяжении срока службы, повышении коэффициента полезного действия и увеличении интервала технического обслуживания при сохранении габаритных размеров и массы.
Также предложен шарнир, содержащий редуктор согласно одному из вариантов реализации, а также первую часть шарнира, которая закреплена без возможности взаимного перемещения на корпусе редуктора, и вторую часть шарнира, которая закреплена без возможности взаимного перемещения на водиле редуктора.
Таким образом, за счет совокупности существенных признаков удалось создать редуктор, имеющий повышенную стойкость к ударным нагрузкам и перегрузкам по моменту, приложенным к его выходному звену с сохранением размеров составных элементов и повышением коэффициента полезного действия.
Благодаря тому, что конструкция содержит один или более сателлитов, приводящих в движение выходное звено, которое воспринимает наибольший момент в редукторе, и находящихся в зацеплении с корпусом с помощью резьб, на указанных сателлитах может быть выполнено меньшее количество заходов резьбы по сравнению с зубчатым зацеплением. Таким образом, увеличивается диапазон возможных передаточных отношений редуктора с сохранением величины момента и величины возможной перегрузки по крутящему моменту на выходном звене, т.к. для этого не требуется уменьшать площадь контакта деталей и размеры витка.
Важным преимуществом предлагаемого резьбового зацепления является отсутствие перемещения контакта резьб сателлитов и корпуса, который может быть представлен точкой, от основания к вершине витка резьбы во время совершения сателлитами планетарного движения, исключая возникновение больших изгибных напряжений в основании витка. Нужно отметить, что такое поведение контакта исключает вход и выход витка из зацепления при прокатывании сателлитов по корпусу редуктора. Отсутствие перемещения пятна (точки) исключает необходимость в особом профиле резьбы для обеспечения постоянного контакта, что позволяет реализовать оптимальную кривизну контактирующих поверхностей сателлитов и корпуса в зависимости от передаточного отношения, размера витка резьбы, а также позволяет увеличить угол профиля для достижения снижения контактных и изгибных напряжений. Другим важным преимуществом отсутствия перемещения пятна от основания к вершине витка резьбы является возможность реализации резьбы с высотой и углом профиля, позволяющим уменьшить количество витков на сателлите и увеличить таким образом передаточное отношение редуктора. Следует отметить и то, что применение резьбового зацепления позволяет использовать в редукторе количество сателлитов в зависимости от прикладываемого крутящего момента к выходному звену, причем максимальное количество ограничено только наличием зазора между сателлитами для обеспечения их свободного вращения, что позволяет значительно повысить максимальный крутящий момент, который возможно приложить к выходному звену, и следовательно повысить стойкость редуктора к ударным нагрузкам и перегрузкам по крутящего моменту.
Благодаря наличию водила, которое исключает радиальное перемещение сателлитов в сторону солнечного колеса и воспринимает радиальную нагрузку, действующую на каждый сателлит при приложении крутящего момента к выходному звену, не происходит дополнительного нагружения солнечного колеса, и, следовательно, уменьшаются потери на трение в зацеплении и повышается коэффициент полезного действия редуктора. Предлагаемое водило также позволяет при износе резьб на протяжении срока службы сохранять межосевое расстояние сателлитов, а следовательно сохранять расположение пятна контакта резьб сателлитов и корпуса редуктора на неизменных расстояниях от осей сателлитов и корпуса, соотносящихся так же, как соотносятся количества заходов резьбы сателлитов и резьбы корпуса редуктора, а также снижать степень изменения передаточного отношения редуктора.
Благодаря наличию подшипников, которые установлены в водиле и в которых установлен сателлит исключается осевое перемещение сателлита, что позволяет достигнуть получение передаточного отношения редуктора близкого к тому, что определяется соотношением количества заходов резьб сателлитов и корпуса, с учетом допусков изготовления, которые зависят от выбранного способа обработки резьб и точности оборудования.
Наличие резьбы между сателлитами и корпусом обеспечивает между ними поток смазочного материала. Кроме того, наличие контакта участков резьбы сателлитов и корпуса с одинаковым углом подъема обеспечивает то, что пятно контакта указанных участков резьбы находится на прямой проходящей через оси сателлита и корпуса в сечении перпендикулярном оси редуктора. Эта особенность позволяет снизить величину трения скольжения контактирующих поверхностей и понизить их износ при воздействии ударных нагрузок и перегрузок по крутящему моменту, приложенному к выходному звену редуктора. Дополнительно уменьшается и степень нагрева поверхностей, а значит и смазочного материала, что также снижает его деградацию. Снижение деградации смазочного материала увеличивает интервал технического обслуживания, что приводит к повышению производительности производственной линии.
В то же время за счет применения сателлитов, которые приводят в движение выходное звено, с участками наружной резьбы вместо зубьев удалось повысить плавность работы редуктора, что снижает шум при его работе, а также снижает степень износа рабочих поверхностей сателлитов и корпуса за счет отсутствия входа зубьев в зацепление, о чем сказано ранее при рассмотрении известных решений.
Согласно одному из вариантов реализации корпус или соединенная с ним без возможности вращения относительно друг друга деталь содержит два участка внутренней резьбы, причем направление резьб указанных участков является противоположным, и сателлит содержит два участка наружной резьбы, причем направление резьб указанных участков является противоположным. Наличие двух участков резьб с противоположным направлением позволяет уравновесить осевые силы, возникающие при приложении крутящего момента к выходному звену редуктора и действующие между сателлитом и корпусом, зафиксировать сателлит от осевого перемещения, исключить необходимость реализации конструктивных элементов, направленных на восприятие указанных осевых нагрузок, исключить осевое перемещение сателлита и, таким образом, упростить конструкцию редуктора.
Согласно одному из вариантов реализации указанная подшипниковая опора выполнена с возможностью восприятия осевой нагрузки для исключения перемещения сателлита в осевом направлении.
Согласно одному из вариантов реализации солнечное колесо содержит по меньшей мере один участок наружной резьбы, посредством которой находится в зацеплении с участком резьбы указанного по меньшей мере одного сателлита, причем углы подъема указанных резьб одинаковые, а направления указанных резьб противоположные, что позволяет уменьшить количество деталей редуктора и уменьшить его длину и массу.
Согласно одному из вариантов реализации редуктор содержит по меньшей мере одно зубчатое колесо, причем солнечное колесо находится в зацеплении с указанным по меньшей мере одним зубчатым колесом, которое неподвижно соединено с указанным по меньшей мере одним сателлитом, что позволяет увеличить диапазон передаточных отношений редуктора за счет наличия еще одной передачи в редукторе, сохранив при этом стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту за счет сохранения размеров сателлита и резьб сателлита и корпуса редуктора.
Согласно одному из вариантов реализации сателлит с двумя участками наружной резьбы неподвижно соединен с указанным по меньшей мере одним зубчатым колесом с использованием шлицевого соединения. В таком исполнении за счет наличия множества шлицов, воспринимающих крутящий момент, повышается стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту на выходном звене.
Согласно одному из вариантов реализации редуктор содержит электрический мотор с зубчатым колесом на валу указанного электрического мотора, и солнечное колесо содержит зубчатый венец, находящийся в зацеплении с указанным зубчатым колесом, причем ось указанного электрического мотора смещена от оси корпуса, что позволяет увеличить передаточное отношение редуктора за счет наличия еще одной передачи в редукторе, сохранив при этом стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту за счет сохранения размеров сателлита и резьб сателлита и корпуса редуктора, а также обеспечить доступ к осевому отверстию, которое предусмотрено согласно другому указанному варианту реализации, с двух его концов.
Согласно одному из вариантов редуктор содержит электрический мотор с зубчатым колесом на валу указанного электрического мотора, размещенного таким образом, что указанное зубчатое колесо указанного электрического мотора находится в зацеплении с зубчатым венцом на солнечном колесе, с которым находится в зацеплении указанное по меньшей мере одно зубчатое колесо. Благодаря этому достигается повышение технологичности за счет уменьшения количества обрабатываемых поверхностей.
Согласно одному из вариантов реализации корпус выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку внутренней резьбы, причем направление резьбы на каждом участке противоположное, и/или указанный по меньшей мере один сателлит выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное. В таком варианте реализации уменьшается длина редуктора за счет исключения необходимости выполнения цилиндрического участка между двумя участками резьбы для обеспечения свободного пространства выхода инструмента, нарезающего резьбы, чтобы избежать срезание резьбы одного участка при нарезании резьбы на другом участке.
Согласно одному из вариантов реализации солнечное колесо имеет по меньшей мере два участка наружной резьбы противоположного направления, находящиеся в зацеплении с указанным по меньшей мере одним сателлитом, и корпус выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку внутренней резьбы, причем направление резьбы на каждом участке противоположное, и/или указанный по меньшей мере один сателлит выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное, и/или солнечное колесо выполнено из двух частей, расположенных последовательно, соосно без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное. В этом варианте реализации, как и в описанном ранее, уменьшается длина редуктора за счет исключения необходимости выполнения цилиндрического участка между двумя участками резьбы для обеспечения свободного пространства выхода инструмента, нарезающего резьбы, чтобы избежать срезание резьбы одного участка при нарезании резьбы на другом участке.
Согласно одному из вариантов реализации солнечное колесо установлено на валу с осевым отверстием. Через указанное отверстие могут быть пропущены, например, кабели для электрических моторов, приводящих в движение последующие звенья манипулятора за звеном, в котором установлен редуктор.
Согласно одному из вариантов реализации солнечное колесо установлено на полом валу, который охватывает полый цилиндр, неподвижно связанный с корпусом редуктора непосредственно или с помощью фланца. Указанные особенности варианта реализации позволяют упростить конструкцию шарнирного узла манипулятора за счет выполнения неподвижного цилиндра с отверстием, через которое могу быть пропущены, например, кабели для электрических моторов, приводящих в движение последующие звенья манипулятора за звеном, в котором установлен редуктор.
Согласно одному из вариантов реализации солнечное колесо и указанное по меньшей мере одно зубчатое колесо имеют участки резьбы, находящиеся в зацеплении. Резьбовое зацепление указанного колеса и солнечного колеса повышает стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту на выходном звене, увеличивает диапазон передаточных отношений, а также позволяет использовать такое количество сателлитов, которое помещается в редукторе с условием наличия зазора между ними для возможности свободного вращения, что дополнительно увеличивает стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту на выходном звене.
Согласно одному из вариантов реализации зубчатые колеса имеют два участка резьбы противоположного направления и солнечное колесо имеет два участка резьбы противоположного направления, причем участки, находящиеся в зацеплении, имеют равные углы подъема и противоположные направления резьб, что позволяет уравновесить осевые силы, возникающие при приложении крутящего момента к выходному звену редуктора, что снижает нагрузку на резьбы сателлита в варианте реализации с двумя участками резьбы на сателлите и корпусе и на подшипники, в которых установлен сателлит, в варианте реализации с одним участком резьбы на сателлите и корпусе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения более подробно поясняется на неограничительных примерах его осуществления со ссылкой на прилагаемые чертежи, на которых:
На фиг. 1 представлен продольный разрез планетарного редуктора, в котором каждый сателлит и корпус имеют два участка резьб противоположных направлений, при этом каждый сателлит выполнен с возможностью приведения его в движение зубчатым колесом, неподвижно связанным с ним и находящимся в зацеплении с солнечным колесом.
На фиг. 2 представлен продольный разрез планетарного редуктора, в котором сателлит и корпус имеют два участка резьбы противоположных направлений, при этом сателлит выполнен с возможностью приведения его в движение солнечным колесом, которое имеет два участка резьб противоположных направлений.
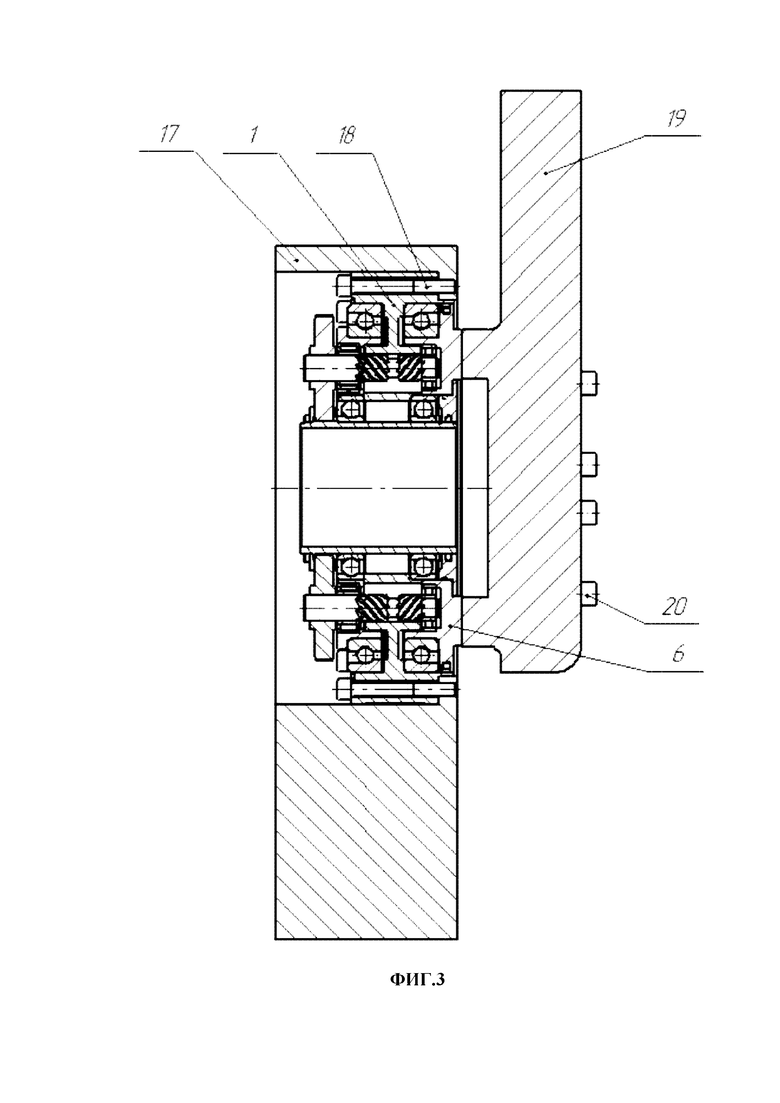
На фиг. 3 представлен продольный разрез шарнира, содержащего планетарный редуктор, к корпусу и фланцу которого прикреплены первая и вторая части шарнира.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Планетарный редуктор согласно одному из предпочтительных вариантов реализации содержит корпус 1 (фиг. 1) с осевым отверстием, на внутренней поверхности которого расположено два участка внутренней резьбы, причем направление указанных резьб противоположное. Корпус 1 в предложенном варианте реализации крепится к механизму, например, к одному из звеньев манипулятора, которое требуется перемещать относительно другого звена манипулятора. Для этого на корпусе 1 предусмотрены отверстия ближе к его к наружному диаметру, через которые могут быть пропущены крепежные элементы, например, винты (на чертеже не показаны). Внутри корпуса 1 равномерно по окружности распределено множество сателлитов 2. Количество сателлитов 2 зависит от свободного пространства с учетом наличия зазора между ними для свободного вращения и от величины крутящего момента, прикладываемого к выходному звену редуктора. Из этого следует, что возможен вариант реализации, в котором внутри корпуса 1 может быть один сателлит 2. Сателлит 2 содержит два участка наружной резьбы, причем направление указанных резьб противоположное. Участки резьбы корпуса 1 контактируют с участками резьбы сателлитов 2. Угол подъема и направление резьб корпуса 1 и сателлитов 2 одинаковые, а количество заходов резьб указанных деталей отличается. Важно отметить, что пятно контакта резьб корпуса 1 и сателлитов 2 находится на прямой, проходящей через оси корпуса 1 и сателлитов 2 в плоскости перпендикулярной оси корпуса 1. Количество контактов резьб сателлитов 2 и корпуса 1 определяется длиной и шагом указанных резьб.
Контакт двух участков резьб сателлитов 2 и двух участков резьб корпуса 1 не позволяет сателлитам перемещаться вдоль оси, но позволяет сателлитам 2 прокатываться по резьбе корпуса 1 при совершении сателлитами 2 планетарного движения. В частности, наличие у сателлитов и корпуса указанных двух участков резьб с противоположным направлением позволяет уравновесить осевые силы, возникающие при приложении крутящего момента к выходному звену редуктора и действующие между сателлитом и корпусом, а также зафиксировать сателлит от осевого перемещения и исключить необходимость реализации конструктивных элементов, например подшипников, направленных на восприятие указанных осевых нагрузок и исключение осевого перемещения сателлита, и, таким образом, упростить конструкцию редуктора.
В этом случае сателлиты 2 имеют с двух сторон от участков резьбы цилиндрические участки, на которые без возможности перемещения установлены подшипники 3 и 4, воспринимающие радиальную нагрузку, действующую на сателлиты 2, и позволяющие сателлитам 2 вращаться вокруг своей оси. Подшипники 3 и 4 в свою очередь установлены в отверстия, равномерно распределенные по окружности на фланцах 5 и 6. В предложенном варианте реализации подшипники 3 представлены игольчатыми подшипниками, а подшипники 4 представлены роликовыми подшипниками, но в других вариантах реализации указанные подшипники могут быть представлены и, например, шариковыми подшипниками. Чтобы уменьшить длину редуктора или увеличить длины участков резьбы сателлита 2 и корпуса 1 возможен вариант реализации, в котором сателлит 2 имеет осевое отверстие (на чертеже не показано), расположенное под участками резьбы, в котором могут быть установлены подшипники (на чертеже не показаны), аналогичные подшипникам 3 и 4. В свою очередь указанные подшипники, установленные в осевом отверстии сателлита 2, могут быть закреплены на оси, зафиксированной на фланцах 5 и 6.
Радиальная нагрузка с подшипников 3 и 4 передается на фланцы 5 и 6. Фланцы 5 и 6 соединены друг с другом крепежными элементами (на чертеже не показаны), например, винтами, которые пропущены через гладкие отверстия (на чертеже не показаны) во фланце 5 и вкручены в резьбовые отверстия (на чертеже не показаны) фланца 6, а между фланцами 5 и 6 расположена проставка 7, через отверстия в которой пропущены указанные винты. При этом проставка 7 зажата между фланцами 5 и 6. Фланцы 5 и 6 установлены для возможности вращения вокруг своей оси в подшипниках 8 и 9, которые установлены в отверстиях корпуса 1. Таким образом, фланцы 5, 6 и проставка 7 закреплены без возможности перемещения относительно друг друга и представляют собой водило редуктора. Из вышесказанного следует, что сателлит 2 закреплен в водиле без возможности радиального перемещения и сохраняет такое положение, при котором пятно контакта резьбы сателлита 2 и корпуса 1 находится на таких расстояниях от оси сателлита 2 и корпуса 1, которое соотносятся так же, как количества заходов резьб на сателлите 2 и корпусе 1.
Необходимо отметить, что возможны варианты реализации, в которых на внутренней поверхности корпуса 1 расположен один участок внутренней резьбы и каждый сателлит 2 имеет один участок наружной резьбы или более двух участков наружной резьбы. Стоит отметить, что количество участков резьбы на корпусе и сателлите зависит от требуемого крутящего момента на выходном валу, при этом чем больше участков резьб при условии увеличения суммарной длины резьб, находящихся в зацеплении, тем больше крутящий момент возможно приложить к выходному звену и тем выше стойкость редуктора к ударным нагрузкам и перегрузкам по крутящему моменту на выходном звене. Участки резьб могут быть разделены канавкой (не показана).
В варианте реализации редуктора, в котором на сателлитах 2 и корпусе 1 расположено по одному участку резьбы, в качестве подшипников 3 и 4 могут быть применены подшипники, способные воспринимать осевую нагрузку, например, радиально-упорные шариковые подшипники для восприятия возникающего осевого усилия, действующего на сателлиты 2 при приложении крутящего момента к выходному звену редуктора, и исключения перемещения сателлита 2 в осевом направлении. При сохранении величины крутящего момента, который возможно приложить к выходному звену редуктора, длины участков резьб на сателлите 2 и корпусе 1 равны сумме длин двух участков резьбы с противоположным направлением на сателлите 2 и корпусе 1 в соответствующем варианте реализации.
При этом редуктор, в котором сателлиты 2 и корпус 1 содержат по одному участку резьбы, имеет меньшую длину в сравнении с редуктором, в котором сателлиты 2 и корпус 1 содержали бы большее количество участков резьб, благодаря отсутствию канавок между участками резьбы, которые требуются для обеспечения свободного пространства для выхода инструмента, нарезающего резьбы, чтобы избежать срезание резьбы одного участка при нарезании резьбы противоположного направления на другом участке. Также повышается технологичность за счет отсутствия необходимости выполнять участки с противоположным направлением резьбы. Кроме того, в варианте реализации, показанном на фиг. 2, технологичность повышается за счет отсутствия необходимости выполнять корпус 1 или солнечное колесо 12 сборными, что уменьшает количество деталей в редукторе.
Следует отдельно отметить, что исключение осевого и радиального перемещения сателлита 2 позволяет достигнуть того, что возможно получить передаточное отношение редуктора близкое к тому, что определяется соотношением количества заходов резьб сателлитов 2 и корпуса 1, с учетом допусков изготовления, которые зависят от выбранного способа обработки резьб и точности оборудования. Также закрепление сателлита 2 с исключением радиального перемещения позволяет снизить степень изменения передаточного отношения редуктора при износе резьб, так как указанное ранее расположение пятна контакта не изменяется.
Профиль боковых поверхностей витков резьбы корпуса 1 в предложенном варианте реализации треугольный. Сателлиты 2 в предложенном варианте реализации имеют выпуклый профиль боковых поверхностей витков резьбы в виде дуги окружности. Возможен вариант реализации, в котором профиль боковой поверхности резьбы корпуса 1 имеет форму дуги окружности и может быть выполнен как выпуклым, так и вогнутым. За счет того, что резьба каждого сателлита может иметь увеличенный угол подъема по отношению к его оси, достигается увеличение потока смазочного материала, направленного вдоль осей сателлитов к подшипникам сателлитов, что снижает нагрев и сателлитов и подшипников, а также улучшает распределение тепла по всему редуктору и, вследствие чего, снижает нагрев смазочного материала, снижая его деградацию.
Важно отметить, что в качестве выходного звена возможно использовать и корпус 1 при закрепленном без возможности движения относительно механизма, к которому прикреплен редуктор, так и водило при закрепленном без возможности движения относительно механизма корпусе 1.
Возможна также реализация конструкции без проставки 7, для чего на одном из указанных фланцев имеется выступ, имеющий длину равную длине проставки 7. Подшипники 8 и 9 в предложенном варианте представлены радиально-упорными шариковыми подшипниками, но могут быть представлены, например, коническими роликовыми подшипниками.
В предложенном варианте реализации, показанном на фиг. 1, сателлиты 2 имеют участки, на котором расположены зубчатые колеса 10. При этом на указанном участке сателлитов 2 расположены шлицы (на чертеже не показаны), а зубчатое колесо 10 имеет отверстие со шлицами ответного профиля. Контакт боковых поверхностей шлицов сателлитов 2 и зубчатых колес 10 предотвращает их вращение относительно друг друга. На сателлитах 2 выполнен бурт с одной стороны и кольцевая канавка с другой стороны от зубчатого колеса. В канавку установлено стопорное кольцо 11, которое ограничивает перемещение зубчатого колеса вдоль оси сателлитов. При этом могут быть реализованы и другие способы крепления зубчатого колеса 10 к сателлитам 2 без возможности перемещения их относительно друг друга, например, соединение с помощью клея, нанесенного на участок сателлитов 2, на котором расположено зубчатое колесо 10. При этом количество сателлитов 2 должно быть кратным количеству зубьев солнечного колеса 12, но остается независимым от количества заходов внутренней резьбы корпуса 1.
Вал солнечного колеса 12, которое в предложенном варианте реализации является входным звеном, установлен в двух подшипниковых опорах, которые состоят из радиальных шариковых подшипников 13, установленных хотя бы частично в отверстиях фланцев 5, 6 и проставки 7.Солнечное колесо 12 имеет зубчатый венец, который находится в зацеплении с зубчатыми колесами 10. В альтернативном варианте реализации для дополнительного увеличения стойкости редуктора к ударным нагрузкам и перегрузке по крутящему моменту на выходном звене зубчатые колеса 10 имеют не зубчатые венцы, а два участка резьбы противоположного направления, и солнечное колесо 12 имеет два участка резьбы противоположного направления, причем участки, находящиеся в зацеплении, имеют равные углы подъема и противоположные направления резьб. Резьбовое зацепление колес 10 и солнечного колеса 12 также позволяет использовать то количество сателлитов 2, которое помещается в редукторе с условием наличия зазора между ними для возможности свободного вращения. Указанные участки резьб находятся в зацеплении друг с другом. Для уравновешивания осевых сил, возникающих при приложении крутящего момента к выходному звену редуктора, возможно разместить не один, а два участка резьбы вместо зубчатого венца на зубчатом колесе 10, причем направление резьбы двух участков противоположное, а участки, находящиеся в зацеплении друг с другом, имеют равный угол подъема и противоположное направление резьбы. Таким образом, снижается нагрузка на резьбы сателлита 2 в варианте реализации с двумя участками резьбы на сателлите 2 и корпусе 1 и на подшипники 3 и 4, в которых установлен сателлит 2, и в варианте реализации с одним участком резьбы на сателлите 2 и корпусе 1, и следовательно повышается стойкость редуктора к ударным нагрузкам и перегрузке по крутящему моменту на выходном звене.
Во фланце 6 установлена заглушка 14, которая имеет на наружной поверхности кольцевую канавку для резинового кольца (на чертеже не показана), которое плотно прилегает к поверхности отверстия во фланце 6. На цилиндрической поверхности отверстия заглушки 14 выполнена кольцевая канавка, в которую установлена резиновая манжета 15, которая плотно прилегает к наружной цилиндрической поверхности вала солнечного колеса 12 и к цилиндрической поверхности канавки в отверстии заглушки 14. На наружной поверхности фланца 6 выполнена кольцевая канавка, в которой установлена манжета 16, которая плотно прилегает к наружной цилиндрической поверхности канавки во фланце 6 и внутренней цилиндрической поверхности отверстия в корпусе 1. Корпус 1 с обратной стороны от фланца 6 может быть прикреплен к фланцу (на чертеже не показан), на котором расположен электрический мотор (на чертеже не показан), приводящий в движение солнечное колесо 12. При этом между корпусом 1 и указанным фланцем, а также между солнечным колесом 12 и указанным фланцем могут быть размещены аналогичные вышеуказанным уплотнения для обеспечения герметизации стыков для того, чтобы предотвратить выход смазочного материала из редуктора. Смазочный материал, например, машинное масло смазывает контактирующие поверхности резьб, зубчатых венцов, тел качения подшипников и уплотнений. На солнечном колесе 12 могут быть реализованы элементы для крепления к валу электрического мотора, например, фланец с множеством отверстий, через которые могут быть пропущены крепежные элементы, например, винты, вкрученные в резьбовые отверстия фланца (на чертеже не показаны) на валу электрического мотора. Также возможно выполнение шпоночного паза (на чертеже не показан) на внутренней поверхности солнечного колеса 12, боковые поверхности которого контактируют с боковыми поверхностями шпонки (на чертеже не показана), расположенной на валу электрического мотора, для передачи вращения вала мотора солнечному колесу 12.
Солнечное колесо 12 имеет сквозное отверстие, через которое, например, могут быть пропущены кабели для электрических моторов, приводящих в движение последующие звенья манипулятора за звеном, в котором установлен редуктор. Для обеспечения доступа к указанному отверстию с двух его концов, ранее указанный электрический мотор (на чертеже не показан), соединенный с редуктором, выполнен с полым валом (на чертеже не показан). В другом варианте реализации для доступа к отверстию в солнечном колесе 12 возможно неподвижно закрепить электрический мотор (на чертеже не показан) со стороны фланца 5 на фланце (на чертеже не показан), неподвижно закрепленном на корпусе 1, с помощью винтов (на чертеже не показаны) таким образом, что ось указанного мотора смещена от оси корпуса 1. При этом на солнечном колесе 12 со стороны фланца 5 расположен зубчатый венец (на чертеже не показан), в зацеплении с которым находится зубчатое колесо (на чертеже не показано), закрепленное на валу указанного электрического мотора для передачи вращения вала электрического мотора солнечному колесу 12. Указанное зубчатое колесо закреплено без возможности взаимного перемещения с помощью, например, шпонки (на чертеже не показаны) и винта (на чертеже не показан), пропущенного через гладкое отверстие (на чертеже не показано) в зубчатом колесе и вкрученного в резьбовое отверстие (на чертеже не показано) в торце вала электрического мотора. При этом возможна замена указанных зубчатого венца на солнечном колесе 12 и зубчатом колесе на участки резьбы, находящиеся в зацеплении. Дополнительно такая реализация позволяет увеличить передаточное отношение редуктора, сохранив размеры сателлитов 2.
Возможно размещение электрического мотора таким образом, что указанное ранее зубчатое колесо на его валу находится в зацеплении с тем же зубчатым венцом на солнечном колесе 12, с которым находятся в зацеплении зубчатые колеса 10, как в варианте реализации, показанном на фиг. 1. Благодаря этому достигается повышение технологичности за счет уменьшения количества обрабатываемых поверхностей. При этом возможна замена указанных зубчатого венца на солнечном колесе 12 и зубчатом колесе на участки резьбы, находящиеся в зацеплении, как и в других вариантах реализации.
Возможен вариант реализации, показанный на фиг. 2, в котором солнечное колесо 12 имеет два участка резьб противоположного направления, которые находятся в зацеплении с двумя участками резьб сателлитов 2. При этом направления резьб каждой пары указанных участков, находящихся в зацеплении, противоположные. Для возможности сборки такого редуктора солнечное колесо 12 или корпус 1 разделены на две соосных части (на чертеже не показаны), расположенные последовательно и соединенные друг с другом без возможности перемещения, чтобы иметь возможность установить одну из частей солнечного колеса 12 или корпуса 1 после сборки одного из фланцев 5 или 6 с сателлитами 2 и соответствующими подшипниками 3 или 4 со второй частью солнечного колеса 12 или корпуса 1. В варианте реализации, согласно которому корпус 1, сателлит 2 и солнечное колесо 12 имеют по одному участку резьбы, подшипники 13 удерживают солнечное колесо 12 от осевого перемещения и представлены, например, радиально-упорными шариковыми подшипниками.
Для повышения стойкости редуктора к ударным нагрузкам и перегрузкам по крутящему моменту на выходном звене требуется повысить твердость резьб, которые воспринимают нагрузку. Для упрощения технологического процесса изготовления редуктора допускается выполнение участков внутренней резьбы, с которой контактируют участки резьбы сателлитов 2, на отдельной от корпуса 1 детали, но соединенной с корпусом 1 без возможности вращения относительно друг друга, чтобы подвергать указанную деталь термической обработке отдельно от корпуса 1. В этом случае два участка внутренней резьбы противоположного направления могут быть выполнены на детали в виде кольца (на чертеже не показана), которое соосно и находится внутри корпуса 1 между подшипниками 8 и 9. При этом указанное кольцо имеет фланец с равномерно распределенными по окружности сквозными гладкими отверстиями, через которые пропущены крепежные элементы, например, винты (на чертеже не показаны), которые вкручены в резьбовые отверстия (на чертеже не показаны) в корпусе 1, к которому прижат фланец указанного кольца. Альтернативный вариант реализации предполагает выполнение отдельной детали в виде кольца с двумя участками резьб противоположного направления с шлицами на наружной поверхности (на чертеже не показано), боковые поверхности которых контактируют с ответными шлицами (на чертеже не показаны) в отверстии корпуса 1, обеспечивая, таким образом, отсутствие вращения указанного кольца относительно корпуса 1. По бокам от указанного кольца в корпусе выполнены кольцевые канавки (на чертеже не показаны), в которые установлены стопорные кольца (на чертеже не показаны), которые ограничивают перемещение указанного кольца вдоль оси корпуса 1.
Для уменьшения люфта выходного звена редуктора относительно входного звена возможен вариант реализации, в котором резьбы на сателлитах 2 имеют увеличенный диаметр, что приводит к наличию натяга в контактах резьб сателлитов 2 и корпуса 1. При этом изначальные диаметры резьбы сателлита 2 и корпуса 1 подгоняются таким образом, чтобы после увеличения диаметра резьбы сателлита 2, пятно контакта резьб сателлита 2 и корпуса 1 располагалось на расстояниях от осей сателлитов и корпуса, соотносящихся так же, как соотносятся количества заходов резьбы сателлитов 2 и резьбы корпуса 1. Альтернативным способом уменьшения люфта в варианте реализации редуктора с сателлитом 2 с одним участком резьбы (на чертеже не показан) является выполнение на корпусе 1 двух участков внутренней резьбы с одинаковым направлением и углом подъема (на чертеже не показано), которые контактируют с наружным участком резьбы на сателлите 2, причем один из участков внутренней резьбы на корпусе 1 выполнен в виде отдельной детали, которая может быть закреплена на корпусе 1 с помощью, например, фланца и винтов (на чертеже не показаны), как описано ранее. При этом между корпусом 1 и указанной деталью установлен компенсатор (на чертеже не показан), длиной которого регулируется осевое положение указанной детали относительно корпуса 1. Таким образом регулируется степень уменьшения люфта между сателлитом 2 и корпусом 1 или создается натяг в их резьбовом зацеплении. Другим способом может быть выполнение одного участка резьбы на корпусе 1 и двух участков резьбы на сателлите 2, причем участки резьбы на сателлите 2 имеют одинаковое направление и одинаковый угол подъема, и один из участков выполнен в виде отдельной детали (на чертеже не показана). В этом случае между участками резьбы может быть выполнено резьбовое соединение (на чертеже не показано) и расположен компенсатор (на чертеже не показан), длиной которого регулируется осевое положение одного участка резьбы сателлита 2 относительно другого участка резьбы сателлита 2. Таким образом регулируется степень уменьшения люфта между сателлитом 2 и корпусом 1 или создается натяг в их резьбовом зацеплении.
Аналогичные способы устранения люфта возможны в альтернативном варианте конструкции, показанном на фиг. 2, в котором сателлиты 2 могут иметь увеличенный диаметр резьбы, что приводит к наличию натяга в контактах резьб сателлитов 2 и корпусом 1, а также сателлитов 2 и солнечного колеса 12 или сателлиты 2 выполнены из двух частей, при изменении расстояния между которыми с помощью описанных ранее компенсаторов (на чертеже не показаны) уменьшается люфт между резьбами сателлита 2 и корпуса 1 и сателлита 2 и солнечного колеса 12, и устраняется люфт между входным и выходным звеньями.
Также возможен вариант реализации, в котором корпус 1 содержит более двух участков внутренней резьбы, например, три участка, причем резьба третьего участка резьбы совпадает по направлению с одним из двух участков резьбы, и сателлит 2 содержит более двух участков резьбы, причем резьба третьего участка совпадает по направлению с одним из двух участков резьбы. Каждый из трех участков резьбы корпуса 1 находится в зацеплении с соответствующим ему участком резьбы сателлита 2, причем в зацеплении находятся участки резьб с одинаковым углом подъема и одинаковым направлением резьбы. Третий участок резьбы выполнен на отдельной части корпуса 1 с возможностью осевого перемещения, что позволяет за счет сближения двух участков резьбы с одинаковым направлением уменьшить зазор между витками резьбы и таким образом уменьшить угловой люфт между сателлитом 2 и корпусом 1 или создать натяг в их резьбовом зацеплении. В альтернативном варианте реализации возможно выполнить третий участок резьбы с возможностью осевого перемещения на сателлите 2, а на корпусе 1 без возможности осевого перемещения. Третий участок на корпусе 1 может быть выполнен в виде отдельной детали, закрепленной на корпусе 1 с помощью фланца и винтов (на чертеже не показаны) аналогично способу, описанному ранее, при этом между корпусом 1 и указанной деталью установлен компенсатор (на чертеже не показан), длиной которого регулируется осевое положение указанной детали относительно корпуса 1. Таким образом регулируется степень уменьшения люфта между сателлитом 2 и корпусом 1 или создается натяг в их резьбовом зацеплении. Возможно выполнить третий участок резьбы отдельно от двух других участков резьбы на сателлите 2. В этом случае между участками резьбы может быть выполнено резьбовое соединение (на чертеже не показано) и расположен компенсатор, длиной которого регулируется осевое положение третьего участка резьбы относительно двух других участков резьбы. Таким образом, представлен альтернативный способ регулировки степени уменьшения люфта между сателлитом 2 и корпусом 1 или создания натяга в их резьбовом зацеплении. Очевидно, что за счет увеличения количества участков резьбы на корпусе 1 и сателлите 2 в варианте реализации, показанном на фиг. 1, а также на корпусе 1, сателлите 2 и солнечном колесе 12 в варианте реализации, показанном на фиг. 2, и при условии увеличения на каждом из указанных элементов редуктора суммы длин этих участков резьб, достигается увеличение крутящего момента, который возможно приложить к выходному звену редуктора.
Возможен другой вариант реализации, в котором корпус 1, сателлиты 2, солнечное колесо 12 могут одновременно или по отдельности состоять из двух частей, расположенных последовательно, соосных друг с другом и закрепленных от перемещения относительно друг друга, каждая из которых имеет по одному участку внутренней резьбы противоположного направления.
На фиг. 3 показан шарнир, содержащий предлагаемый редуктор. Первая часть 17 шарнира прикреплена без возможности взаимного перемещения к корпусу 1 редуктора с помощью винтов 18, пропущенных через сквозные отверстия в корпусе 1 и вкрученных в резьбовые отверстия части 17 шарнира. Вторая часть 19 шарнира закреплена без возможности взаимного перемещения на фланце 6 с помощью винтов 20, пропущенных через сквозные отверстия (на чертеже не показаны) в части 19 шарнира и вкрученных в резьбовые отверстия (на чертеже не показаны) фланца 6 редуктора. Возможно реализовать и другие известные конструктивные элементы для неподвижного соединения корпуса 1 редуктора и части 17 шарнира, например, с помощью шлицов (на чертеже не показаны) в отверстии части 17 шарнира и на наружной поверхности корпуса 1 и указанных ранее винтов 18. Аналогичным способ возможно прикрепить и часть 19 шарнира к фланцу 6. Таким образом достигается вращение одной части шарнира относительно другой части шарнира в зависимости от того, что является выходном звеном редуктора.
Предлагаемый планетарный редуктор работает следующим образом. В случае, если выходным звеном является водило, корпус 1 неподвижен. При вращении солнечного колеса 12 зубчатые колеса 10, находящиеся с ним в зацеплении, совершают планетарное движение, вращаясь вокруг своей оси и оси редуктора (корпуса 1). Соединенные с зубчатыми колесами 10 сателлиты 2 вращаются вокруг своей оси и прокатываются по участкам внутренней резьбы корпуса 1, вращаясь также и вокруг оси редуктора и, следовательно, совершая планетарное движение. Сателлиты 2 создают окружное усилие (усилие, направленное по касательной к окружности, на которой размещен контакт резьбы сателлитов 2 и корпуса 1), которое через подшипники 3 и 4 передается на водило и приводит водило во вращательное движение. При этом возникает крутящий момент между водилом и корпусом 1, и происходит изменение величины крутящего момента и скорости вращения между солнечным колесом и водилом.
В случае, если выходным звеном является корпус 1 водило неподвижно. При вращении солнечного колеса 12 зубчатые колеса 10, находящиеся с ним в зацеплении, вращаются вокруг своей оси. Соединенные с зубчатыми колесами 10 сателлиты 2 вращаются вокруг своей оси и создают окружное усилие, которое приводит к вращению корпуса 1 вокруг своей оси. При этом возникает крутящий момент между водилом и корпусом 1, и происходит изменение величины крутящего момента и скорости вращения между солнечным колесом и корпусом.
Редуктор, показанный на фиг. 2, работает аналогичным образом с той лишь разницей, что солнечное колесо 12 контактирует напрямую с сателлитами 2.
Стоит отметить, что при необходимости увеличения крутящего момента, который возможно приложить к выходному звену, при сохранении стойкости редуктора к ударным нагрузкам и перегрузкам по моменту, возможно увеличение длины участков резьбы, находящихся в зацеплении, с сохранением равномерности нагружения участков резьбы на их длине за счет точечного контакта резьб, имеющего более низкую жесткость.
Варианты реализации, указанные в настоящем раскрытии или вытекающие из него, могут частично или полностью комбинироваться друг с другом. Настоящее изобретение не ограничено конкретными вариантами реализации, раскрытыми в описании в иллюстративных целях, и охватывает все возможные модификации и альтернативы, входящие в объем настоящего изобретения, определенный формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| Редуктор орбитальный | 2016 |
|
RU2626422C1 |
| Двухступенчатый циклоидальный редуктор | 2020 |
|
RU2733447C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Планетарный редуктор | 2016 |
|
RU2633025C1 |
| МЕХАНИЗМ ПОВОРОТА | 1996 |
|
RU2093453C1 |


Группа изобретений относится к редукторам. Редуктор содержит корпус, который содержит участок внутренней резьбы, сателлит, расположенный в корпусе, фиксируемый от осевого перемещения относительно корпуса и содержащий участок наружной резьбы, который находится в зацеплении с указанным участком внутренней резьбы корпуса, причем углы подъема указанного участка наружной резьбы и указанного участка внутренней резьбы равны и их направления совпадают. Редуктор также содержит солнечное колесо, расположенное в корпусе и выполненное с возможностью приведения в движение указанного сателлита, и водило, выполненное с возможностью вращения относительно корпуса, а указанный сателлит присоединен к водилу с возможностью вращения в подшипниковой опоре, установленной в водиле. Также заявлен шарнир, содержащий такой редуктор. Обеспечивается увеличение стойкости редуктора к ударным нагрузкам и перегрузкам по крутящему моменту, приложенному к выходному звену. 2 н. и 13 з.п. ф-лы, 3 ил.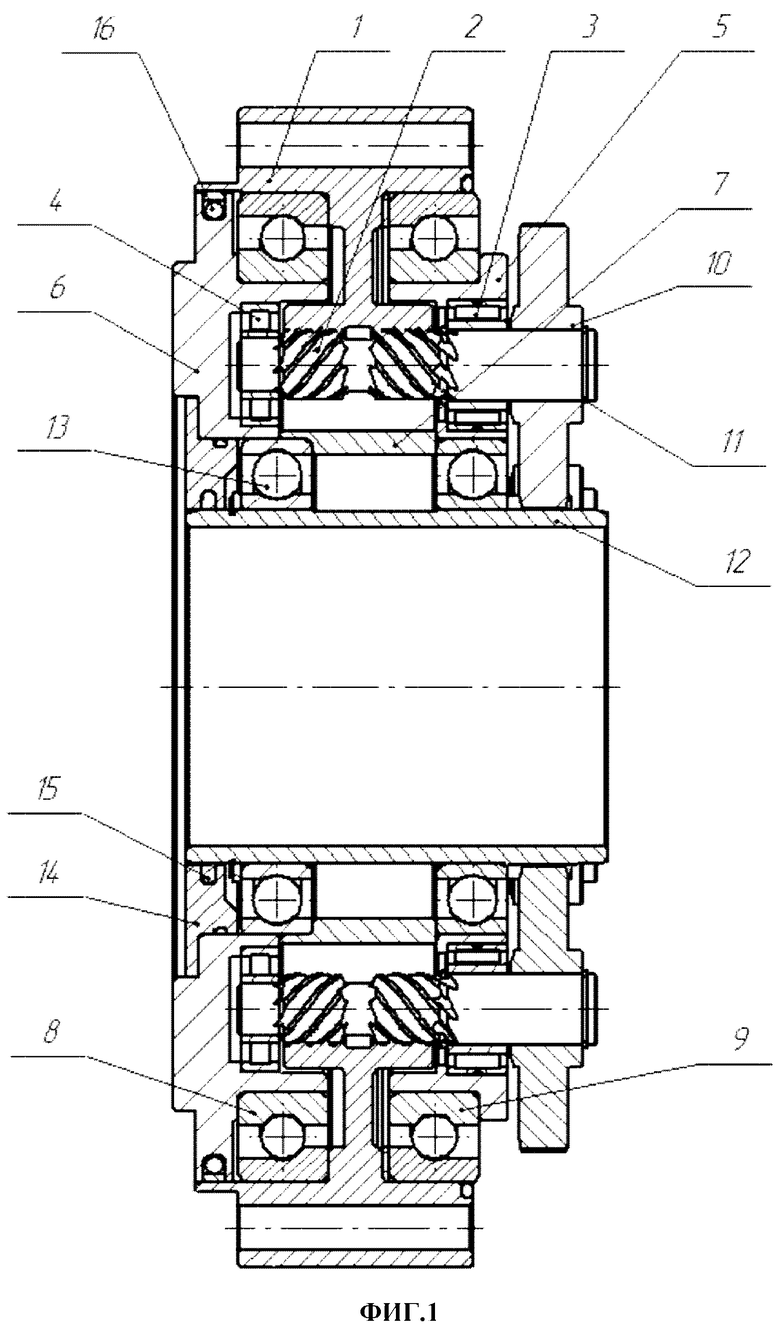
1. Редуктор, содержащий
корпус, который содержит по меньшей мере один участок внутренней резьбы или соединен с деталью без возможности вращения относительно друг друга, содержащей по меньшей мере один участок внутренней резьбы,
по меньшей мере один сателлит, расположенный в корпусе, фиксируемый от осевого перемещения относительно корпуса и содержащий по меньшей мере один участок наружной резьбы, который находится в зацеплении с указанным по меньшей мере одним участком внутренней резьбы корпуса, причем ось вращения указанного по меньшей мере одного сателлита смещена от оси вращения корпуса, причем углы подъема указанного участка наружной резьбы и указанного участка внутренней резьбы равны и их направления совпадают,
солнечное колесо, расположенное в корпусе и выполненное с возможностью приведения в движение указанного по меньшей мере одного сателлита, причем ось вращения указанного солнечного колеса совпадает с осью вращения корпуса, и
водило, расположенное в корпусе и выполненное с возможностью вращения относительно корпуса, а указанный по меньшей мере один сателлит присоединен к водилу с возможностью вращения в подшипниковой опоре, установленной в водиле, причем ось вращения водила совпадает с осью вращения корпуса.
2. Редуктор по п. 1, в котором корпус или соединенная с ним без возможности вращения относительно друг друга деталь имеет два участка внутренней резьбы, причем направление резьб указанных участков является противоположным, и сателлит имеет два участка наружной резьбы, причем направление резьб указанных участков является противоположным.
3. Редуктор по п. 1, в котором указанная подшипниковая опора выполнена с возможностью восприятия осевой нагрузки.
4. Редуктор по любому из пп. 1-3, в котором солнечное колесо содержит по меньшей мере один участок наружной резьбы, посредством которой находится в зацеплении с участком резьбы указанного по меньшей мере одного сателлита, причем углы подъема указанных резьб одинаковые, а направления указанных резьб противоположные.
5. Редуктор по любому из пп. 1-4, также содержащий по меньшей мере одно зубчатое колесо, причем солнечное колесо находится в зацеплении с указанным по меньшей мере одним зубчатым колесом, которое неподвижно соединено с указанным по меньшей мере одним сателлитом.
6. Редуктор по п. 5, в котором указанный по меньшей мере один сателлит содержит два участка наружной резьбы, причем указанный по меньшей мере один сателлит неподвижно соединен с указанным по меньшей мере одним зубчатым колесом с использованием шлицевого соединения.
7. Редуктор по любому из пп. 1-6, который содержит электрический мотор с зубчатым колесом на валу указанного электрического мотора, и солнечное колесо содержит зубчатый венец, находящийся в зацеплении с указанным зубчатым колесом, причем ось указанного электрического мотора смещена от оси корпуса.
8. Редуктор по любому из пп. 5-6, который содержит электрический мотор с зубчатым колесом на валу указанного электрического мотора, размещенного таким образом, что указанное зубчатое колесо указанного электрического мотора находится в зацеплении с зубчатым венцом на солнечном колесе, с которым находится в зацеплении указанное по меньшей мере одно зубчатое колесо.
9. Редуктор по любому из пп. 1-8, в котором корпус выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку внутренней резьбы, причем направление резьбы на каждом участке противоположное, и/или указанный по меньшей мере один сателлит выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное.
10. Редуктор по п. 1, в котором солнечное колесо имеет по меньшей мере два участка наружной резьбы противоположного направления, находящиеся в зацеплении с указанным по меньшей мере одним сателлитом, и корпус выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку внутренней резьбы, причем направление резьбы на каждом участке противоположное, и/или указанный по меньшей мере один сателлит выполнен из двух частей, расположенных последовательно, соосно и без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное, и/или солнечное колесо выполнено из двух частей, расположенных последовательно, соосно без возможности взаимного перемещения, каждая из которых имеет по одному участку наружной резьбы, причем направление резьбы на каждом участке противоположное.
11. Редуктор по любому из пп. 5-8, в котором солнечное колесо и указанное по меньшей мере одно зубчатое колесо имеют участки резьбы, находящиеся в зацеплении.
12. Редуктор по п. 11, содержащий по меньшей мере два зубчатых колеса, причем зубчатые колеса имеют два участка резьбы противоположного направления, и солнечное колесо имеет два участка резьбы противоположного направления, причем участки, находящиеся в зацеплении, имеют равные углы подъема и противоположные направления резьб.
13. Редуктор по любому из пп. 1-12, в котором солнечное колесо установлено на валу с осевым отверстием.
14. Редуктор по любому из пп. 1-12, в котором солнечное колесо установлено на полом валу, который охватывает полый цилиндр, неподвижно связанный с корпусом редуктора непосредственно или с помощью фланца.
15. Шарнир, содержащий редуктор по любому из пп. 1-14, а также первую часть шарнира, которая закреплена без возможности взаимного перемещения на корпусе редуктора, и вторую часть шарнира, которая закреплена без возможности взаимного перемещения на водиле редуктора.
| РОЛИКОВИНТОВОЙ РЕДУКТОР (ВАРИАНТЫ), ПРИВОДНОЙ МЕХАНИЗМ И ШАРНИРНЫЙ УЗЕЛ, СОДЕРЖАЩИЙ ТАКОЙ РЕДУКТОР | 2019 |
|
RU2719091C1 |
| Редуктор-шарнир | 2017 |
|
RU2663030C1 |
| JP 2011133052 A, 07.07.2011 | |||
| FR 2925640 B1, 09.04.2010. | |||

