Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, испытывающих в процессе работы воздействие возмущений в виде гармонических колебаний моментов нагрузки.
В роторных электромеханических системах неизбежные погрешности изготовления, сборки, монтажа и конструктивные особенности механических элементов становятся причинами появления доминирующих возмущений в виде гармонических колебаний моментов нагрузки (Мн) электродвигателей, которые могут быть выражены детерминированной функцией времени общего вида

где M0, Mj - соответственно постоянная составляющая момента и амплитуда его j-й гармоники; Ωj, ϕ0j - угловая скорость и начальное угловое положение j-го ротора, n - общее число вращающихся масс, t - время.
При использовании индивидуальных электроприводов, наиболее характерных для современного технологического оборудования, в спектре возмущений доминируют нулевая и первая гармоники, определяемые движением главного рабочего органа технологической машины:

где ω1 - угловая скорость рабочего органа, ω1=ω/i, ω - частота вращения электродвигателя, i - передаточное отношение редуктора.
Флуктуации моментов нагрузки приводят к соответствующим изменениям скорости электродвигателя и рабочих органов технологических машин, что может явиться причиной существенного ухудшения качества выпускаемой продукции. При этом снижается точность изготовления деталей при металлообработке, нарушаются геометрические размеры длинномерных материалов при обработке в поточных линиях (диаметр волокна или провода, толщина пленки и различных покрытий), выходят за допустимые границы их весовые показатели (плотность бумаги, ткани и др.), ухудшается светопропускание оптических световодов и т.п.
Известен «Способ каскадного автоматического регулирования» (патент на изобретение РФ №2127895, МПК G05B 13/02, 1999 г.), заключающийся в том, что осуществляют измерение вспомогательного параметра объекта и стабилизацию его с помощью одноконтурной системы регулирования, измерение основного параметра объекта, стабилизации его с помощью астатической одноконтурной системы регулирования и формирования сигнала задания регулятору внутреннего контура, при этом устанавливают сигналы задания верхнего и нижнего допустимых значений вспомогательного параметра объекта для регулятора внутреннего контура и определяют на заданном интервале ошибку рассогласования для астатического регулятора внешнего контура, воздействующего посредством исполнительного устройства на объект в заданном интервале с помощью аналогового сигнала, определяемого законом регулирования астатического регулятора внешнего контура, при выходе вспомогательного параметра объекта из заданного интервала с выхода регулятора внутреннего контура на исполнительное устройство подают управляющее воздействие релейного типа со знаком, уменьшающим отклонение вспомогательного параметра объекта от верхнего и нижнего допустимых значений, а основного параметра объекта - от заданного значения и одновременно отключают управляющее воздействие астатического регулятора внешнего контура, формируют и сохраняют интегральную составляющую этого регулятора на уровне значения средней позиции выходного сигнала регулятора внутреннего контура, при возврате вспомогательного параметра объекта в заданный интервал одновременно отключают управляющее воздействие регулятора внутреннего контура и включают управляющее воздействие астатического регулятора внешнего контура.
Способ решает поставленные перед ним задачи, но, будучи построенным на релейном принципе работы, в некоторых случаях (например, при гармоническом виде возмущений) может привести к возникновению режима автоколебаний. Кроме этого способ теряет свою работоспособность при отсутствии возможности измерения вспомогательного параметра, который в данном случае должен быть представлен моментом нагрузки на валу двигателя электромеханической системы.
Известен способ компенсации возмущений в установившемся режиме, именуемый как «принцип внутренней модели» (Гудвин Г.К. Проектирование систем управления / Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э.. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с. (стр. 284-285)), который заключается в том, что управление осуществляют регулятором по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы, выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки,
где s - комплексная переменная Лапласа, ω1=ω/i - угловая скорость рабочего органа, ω - угловая скорость вала электродвигателя, i - передаточное отношение редуктора, вводят этот полином сомножителем в знаменатель передаточной функции регулятора по скорости рабочего органа, а искажение передаточной функции электромеханической системы по управлению устраняют за счет воздействия внеконтурного формирователя.
При этом выходной сигнал регулятора по скорости рабочего органа будет содержать гармоническую составляющую, которая благодаря действию отрицательной обратной связи по скорости рабочего органа, замыкающей внешний контур регулирования, обеспечит противофазную компенсацию возмущения. Способ выполняет свои основные функции и требует измерения лишь одной выходной координаты объекта управления - угловой скорости вала рабочего органа.
Основным недостатком предложенного технического решения является низкая точность, поскольку способ отрабатывает только одну частоту внешнего возмущения и не адаптируется к вариации частоты внешнего воздействия. При использовании данного способа сложно добиться приемлемой компенсации возмущения, имеющего разную частоту, что свидетельствует о неселективной инвариантности способа, построенного с применением принципа внутренней модели возмущения, на что указано и в приведенном литературном источнике (Гудвин Г.К. Проектирование систем управления / Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э.. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с. стр. 287).
Наиболее близким к заявляемому является известный способ адаптивной компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе (патент на изобретение РФ №2565490, МПК G05B 13/01, Н02Р 7/00, 2015 г.), принятый за прототип, заключающийся в том, что управление осуществляют регулятором по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы, выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, вводят этот полином сомножителем в знаменатель передаточной функции регулятора по скорости рабочего органа, а искажение передаточной функции электромеханической системы по управлению устраняют за счет воздействия внеконтурного формирователя. Для достижения поставленной цели способ дополняют тем, что колебания момента нагрузки компенсируют по внутреннему контуру, представляющему собой обратные связи по напряжению, скорости и току, передаточные функции элементов системы настраивают в два этапа, на первом из которых полином регулятора по скорости рабочего органа формируют с учетом заданного быстродействия системы, по этому полиному находят среднегеометрический корень характеристического полинома внутреннего контура регулирования, задают общий вид желаемого полинома передаточной функции внутреннего контура регулирования, быстродействие которого оптимальным образом соответствует быстродействию регулятора по скорости рабочего органа при их каскадном включении, а на втором этапе по заданному желаемому полиному передаточной функции внутреннего контура регулирования и среднегеометрическому корню характеристического полинома внутреннего контура регулирования формируют коэффициенты полинома передаточной функции внутреннего контура регулирования, причем по результатам измерения скорости рабочего органа постоянно корректируют коэффициенты е1, е2, е3 передаточных функций внеконтурного формирователя и регулятора.
В основу работы способа-прототипа положен достаточно эффективный метод подавления указанных ранее гармонических возмущений с применением принципа селективной инвариантности, предполагающим включение модели возмущения в знаменатель передаточной функции регулятора в виде формирующего полинома, который для выражения (1) приобретает следующий вид:

где s - комплексная переменная Лапласа.
Способ, выбранный за прототип, выполняет свои основные функции, однако (как будет детально показано далее) обладает некоторыми недостатками. Для регулирования производительности машин при смене ассортимента изделий с целью оптимизации режимов обработки различных деталей и материалов требуется обеспечивать работу электромеханической системы в широком скоростном диапазоне. В этих условиях робастных свойств системы может оказаться недостаточно не только для сохранения показателей качества управления, но даже для сохранения устойчивости. В полной мере решить проблему устойчивости адаптивной электромеханической системы средствами способа-прототипа достаточно сложно, поскольку в широком скоростном диапазоне могут принимать неустойчивую неминимально-фазовую форму сами корректирующие устройства - внеконтурные префильтры, что приводит к потере устойчивости системы даже при разомкнутом контуре адаптации. Кроме того, использование сигнала задания скорости, являющегося упреждающим по отношению к реальной скорости рабочего органа, может ухудшать качество адаптивного управления, и для его улучшения потребуется устанавливать дополнительные фильтры, настраиваемые на модель адаптируемой системы.
Для технической реализации и параметрической самонастройки внутриконтурной части регулятора и его внеконтурной части (префильтра) могут быть использованы различные формы представления управляющих устройств, широко применяемые, например, для наблюдателей состояния. Наиболее распространенными из них являются каноническая форма управляемости Фробениуса и каноническая форма наблюдаемости, обладающие взаимно противоположными свойствами.
Сохранение устойчивости системы с использованием известного способа адаптивной компенсации влияния гармонических колебаний момента нагрузки и высокое качество переходных процессов с подавлением гармонического возмущения при изменениях уровня скорости может быть достигнуто для редукторного варианта электропривода, когда угловая скорость рабочего органа (т.е. частота гармонического возмущения) оказывается на порядок ниже скорости вращения электродвигателя. При этом требования к быстродействию контура адаптации регулятора существенно ослабляются. При создании прецизионных высокоскоростных электромеханических систем с непосредственной (безредукторной) связью вала электродвигателя и рабочего органа, а также при реализации предложенной адаптации регулятора в других структурах селективно-инвариантных электромеханических систем с различными объектами управления указанные достоинства полученного решения могут быть в значительной степени утрачены.
С момента превышения реальной (или заданной) скоростью некоторой граничной величины ωгр, имеющей различные значения для разных регуляторов, внутриконтурная часть устройства управления приобретает неминимально-фазовый характер, а внеконтурный префильтр становится неустойчивым динамическим звеном. Вследствие этого адаптивные варианты селективно инвариантных электромеханических систем, построенных с использованием таких префильтров, также теряют свою устойчивость независимо от способа реализации алгоритма адаптации. Особенно это характерно при низком порядке передаточных функций объектов управления.
Недостатками способа-прототипа являются низкая точность и/или невозможность обеспечения устойчивости электромеханической системы:
1. при необходимости управления рабочим органом объектов с требуемым широким диапазоном изменения скоростей;
2. при работе в безредукторных системах, с непосредственным сочленением вала электродвигателя и рабочего органа, формирующих гармонические возмущения более высоких частот и требующих соответственно лучших динамических показателей адаптивного управления;
3. при использовании его для объектов низкого порядка, т.к. в подобных системах наблюдается наиболее узкий скоростной диапазон устойчивой работы из-за наименьшего порядка префильтра;
4. при формировании в структурах селективно-инвариантных электромеханических систем "быстрых" внутренних подсистем, настроенных на темп в 5-7 раз выше темпа основного контура управления, т.к. в этом случае «быстрая» внутренняя подсистема может быть аппроксимирована звеном низкого порядка при расчете адаптивного регулятора внешнего (основного) контура, что приближает ее по свойствам к безынерционному объекту.
Известна самонастраивающаяся система комбинированного регулирования (патент на изобретение РФ №2022313, МПК G05B 13/00, 1994 г.) содержащая регулятор, сумматоры, измеритель рассогласования, блок самонастройки, корректирующий фильтр, блоки умножения, управляемые ключи, блок памяти. Разомкнутый контур управления системы предназначен для компенсации контролируемых возмущений. Замкнутый контур регулирования формирует управление на основе результирующего отклонения выхода объекта от уставки. Блок самонастройки системы предназначен для работы в условиях редкоизмеряемого выхода объекта. Он повышает качество работы обоих контуров системы за счет стабилизации их коэффициентов передачи.
Система решает поставленные задачи, однако обладает рядом существенных недостатков. Во-первых, в состав устройства-аналога необходимо ввести датчик контролируемого внешнего возмущения, что в ряде случаев затруднительно (в частности при воздействии на электромеханическую систему такого возмущения, как момент статического сопротивления на валу электродвигателя). Во-вторых, наличие в контуре обратной связи блоков, производящих сложный логический анализ информации, элементов записи и хранения, блока задержки, усложняет устройство и резко ухудшает его быстродействие. В-третьих, принцип работа блока самонастройки предполагает наличие временного интервала, когда управляющие и возмущающие воздействия системой игнорируются.
Известно устройство для компенсации возмущений (Гудвин Г.К. Проектирование систем управления / Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э.. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с., рис. 10.1). Устройство содержит внеконтурный формирователь, представляющий собой префильтр и предназначенный для устранения искажения передаточной функции электромеханической системы по управлению; элемент сравнения, который формирует на своем выходе сигнал ошибки, управляющий регулятором. Регулятор замыкает отрицательную обратную связь по скорости рабочего органа и выполнен в виде блока, передаточная функция которого представляется отношением полиномов. Кроме этого в составе системы имеется силовой преобразователь, который преобразует напряжение управления на своем входе в напряжение на якорной обмотке электродвигателя постоянного тока. Измерительный блок предназначен для измерения скорости электродвигателя постоянного тока. Регулятор и внеконтурный формирователь реализованы в виде цифровых или аналоговых блоков, которые при наладке требуют установки внутренних параметров, соответствующих полиномам, синтезированным в процессе конструирования системы управления.
Основным недостатком устройства являются низкая точность из-за отсутствия адаптации к вариации частоты внешнего воздействия. Этот факт подтвержден исследованиями (Структурно-параметрический синтез и оптимизация регуляторов селективно-инвариантных электромеханических систем с гармоническим моментом нагрузки, Тарарыкин С.В., Копылова Л.Г., Тихомирова И.А., журнал Электротехника, 2015, №5. стр. 62-70), в которых приведены результаты анализа режима пуска и приложения возмущающего момента, соответствующего выражению (1). Анализ результатов экспериментов указывает на то, что отработка данного вида внешнего возмущения без настройки параметров внеконтурного формирователя и регулятора происходит неэффективно. На временной диаграмме скорости заметны колебания, величина которых свидетельствует о нерезультативности работы устройства на частоте, отличной от заданной.
Наиболее близким к предлагаемому является устройство адаптивной компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе (патент на изобретение РФ №2565490, «Способ адаптивной компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе и устройство для его осуществления», МПК G05B 13/01, Н02Р 7/00, 2015 г.), принятое за прототип, содержащее внеконтурный формирователь, регулятор, силовой преобразователь, электродвигатель постоянного тока, несколько элементов сравнения, три безынерционных звена обратных связей по напряжения, току и скорости, делитель, квадратор, блок вычисления e1, блок вычисления е2, блок вычисления е2.
Устройство выполняет свои основные функции, но обладает низкой точностью и/или не обеспечивает устойчивости электромеханической системы в условиях, указанных выше при описании способа прототипа.
Проведем анализ работоспособности устройства, принятого за прототип. Эксперименты проведем для электромеханической системы, в рабочем органе которой отсутствует редуктор, иначе говоря, с непосредственным сочленением вала электродвигателя и рабочего органа, формирующих гармонические возмущения более высоких частот и требующих соответственно лучших динамических показателей адаптивного управления.
При синтезе регулятора, используем принцип, заложенный в основу способа-прототипа. Поставим задачу получения аналитических зависимостей коэффициентов полиномов регулятора от скорости, построения на этой основе соответствующих каналов адаптивного управления и синтеза адаптивных селективно-инвариантных электромеханических систем объектами пониженной степени сложности, способных подавлять гармонические возмущения момента нагрузки и сохранять заданные показатели качества во всем диапазоне рабочих скоростей.
В качестве основных параметров, влияющих на работоспособность системы выбраны:
UωЗ - напряжение, определяющее заданное значение скорости рабочего органа;
UωЗФ - напряжение после внеконтурного формирователя;
Uy, U - управляющее и выходное напряжение силового преобразователя;
Ia - ток якорной цепи электродвигателя постоянного тока;
ω - угловая скорость вала электродвигателя постоянного тока;
ωн - номинальная угловая скорость вала электродвигателя постоянного тока;
МН - момент нагрузки (статического сопротивления).
Также здесь и далее приняты следующие обозначения параметров системы:
КСП и ТСП - коэффициент передачи и постоянная времени силового преобразователя напряжения;
Ra и Ta - активное сопротивление и постоянная времени якорной цепи электродвигателя постоянного тока;
С - конструктивная постоянная двигателя постоянного тока;
J - суммарный момент инерции ротора двигателя постоянного тока и рабочего органа.
Система имеет регулятор 2, в знаменатель передаточной функции которого, согласно способу - прототипу, введена, как показано выше, модель возмущения. Проверим работоспособность этой электромеханической системы, построенной с применением двигателя постоянного тока 4, управляемого от силового преобразователя 3.
Для конкретности приняты следующие значения параметров объекта: КСП=22, ТСП=0,001 с, Ra=0,177 Ом, Та=0,02 с, ωн=157 рад/с, С=1,37 Вб, J=0,2 кг⋅м2.
Кроме этого учтем, что мы исключили из структуры устройства редуктор.
Предположим, что требуется обеспечить время нарастания переходной характеристики системы регулирования скорости в линейной зоне ее работы не более 50 мс при отсутствии перерегулирования, нулевую статическую ошибку по скорости от действия момента нагрузки вида

а также эффективную динамическую компенсацию возмущения с временем восстановления, равным времени регулирования.
Исследования проведем, получив следующие синтезированные параметры устройства.
Структура электромеханической системы, содержит «быструю» внутреннюю подсистему на базе безынерционного регулятора скорости, настраиваемую на быстродействие, в 5-7 раз превышающее заданные динамические требования, а также внешний контур регулирования, содержащий модель возмущения.
Для синтеза ее регуляторов используется расчетная процедура, когда синтез ведется от внутреннего контура к внешнему.
Методом модального управления синтезируется безынерционный регулятор состояния внутренней подсистемы с высоким быстродействием (7 мс). Для этого в качестве его желаемого принимается характеристический полином Ньютона 3-го порядка с величиной среднегеометрического корня Ω0Б=835 c-1. Расчет матрицы коэффициентов обратных связей по скорости, по току и по напряжению дает следующий результат: K=[-13,53 -0,316 -0,066].
При расчете внешнего полиномиального регулятора с моделью возмущения используется основное полиномиальное уравнение синтеза

где E(s) и s⋅F(s) - полиномы числителя и знаменателя передаточной функции регулятора, причем F(s)=G(s)⋅V(s), V(s) - вспомогательный полином, обеспечивающий техническую реализуемость регулятора, D(s) - желаемый характеристический полином синтезируемой системы, P(s) и Q(s) - характеристический полином и полином воздействия передаточной функции внутренней подсистемы.
Для обеспечения апериодических процессов желаемый характеристический полином будем назначать в форме Ньютона с кратными действительными значениями корней, равными величине определяемой требованиями быстродействия, т.е. принимать

где р - степень желаемого полинома.
Высокое быстродействие внутренней подсистемы дает основание считать ее безынерционной при синтезе внешнего регулятора, т.е. принять при указанных параметрах: P(s)=1, Q(s)=b0=0,13, где b0 - коэффициент усиления внутренней подсистемы.
В соответствии с заданными требованиями динамики в качестве D(s) выбирается полином Ньютона 3-го порядка с величиной среднегеометрического корня Ω0=120 с-1, что соответствует заданному быстродействию (50 мс).
В этом случае уравнение синтеза (4) принимает следующий развернутый вид

Решая уравнение синтеза регулятора внешнего контура, получаем коэффициенты полинома передаточной функции регулятора E(s):



где коэффициенты d0, d1 и d2 находятся по желаемому характеристического полинома синтезируемой системы D(s) с подстановкой конкретного значения Ω0, соответствующего заданному быстродействию. Такая же зависимость e1(ω) будет присуща и полиному внеконтурного формирователя.
Проанализируем работоспособность способа и устройства, принятых за прототип, используя результаты синтеза регулятора, где структура регулятора внешнего контура, содержащего модель возмущения, реализована в канонической форме управляемости.
Для конкретных значений параметров объекта, приведенных выше, и среднегеометрическом корне желаемого характеристического полинома Ω0=120 с-1, получаем следующие численные выражения полиномов регулятора


При этом граничная частота, при которой префильтр становится неустойчивым, составляет ωгр=207,85 с-1.
На фиг. 1 приведены каскадные переходные характеристики работы устройства-прототипа, реализующего способ-прототип, в широком диапазоне скоростей. Каскадные переходные характеристики получены при подаче на вход системы задающего сигнала, представляющего собой многоступенчатое воздействие, величина которого меняется каждые 0.5 секунды.
Из анализа характеристик фиг. 1 следует, что с момента превышения реальной (или заданной) скоростью некоторой граничной величины внеконтурный префильтр становится неустойчивым динамическим звеном. Вследствие этого адаптивная селективно инвариантная электромеханическая система, построенная с использованием такого префильтра в канонической форме управляемости также теряет свою устойчивость независимо от способа реализации алгоритма адаптации - в функции реальной скорости или ее заданного значения. При управлении безынерционным объектом наблюдается узкий скоростной диапазон устойчивой работы, т.к. подобная система имеет низкий порядок внеконтурного префильтра, и соответственно небольшие значения граничных частот его устойчивости.
Анализ фиг. 1 указывает на возникновение колебаний угловой скорости ω вала электродвигателя постоянного тока 4 на седьмой секунде эксперимента, что свидетельствует о потере устойчивости предложенного в способе и устройстве прототипах технического решения.
Таким образом, недостатком способа-прототипа и устройства-прототипа является неспособность обеспечить устойчивость системы в широком диапазоне изменения скоростей.
Технический результат предлагаемого изобретения заключается в увеличении устойчивости в широком диапазоне скоростей.
Технический результат достигается тем, что в способе адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей заключающемся в том, что управление осуществляют регулятором по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы, выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, вводят этот полином сомножителем в знаменатель передаточной функции регулятора внешнего контура по скорости рабочего органа, колебания момента нагрузки дополнительно компенсируют по внутреннему контуру, представляющему собой обратные связи по напряжению, скорости и току, передаточные функции элементов системы настраивают в два этапа, причем по результатам измерения скорости рабочего органа постоянно корректируют коэффициент e1 передаточной функции регулятора внешнего контура, передаточные функции регуляторов внешнего и внутреннего контуров формируют в направлении от внутреннего контура к внешнему, для чего на первом этапе находят коэффициенты полинома передаточной функции внутреннего контура регулирования, причем осуществляют это по заданному желаемому полиному передаточной функции внутреннего контура регулирования и среднегеометрическому корню характеристического полинома внутреннего контура регулирования, соответствующего быстродействию в 5-7 раз превышающему заданные динамические требования к системе, а на втором этапе полином регулятора внешнего контура по скорости рабочего органа формируют с учетом заданного быстродействия системы, при этом структуру регулятора внешнего контура, содержащего модель возмущения, реализуют в объединенной канонической форме наблюдаемости.
Технический результат достигается тем, что в устройстве адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей, содержащем первый элемент сравнения, выход которого соединен с первым входом регулятора, первый выход которого подключен к первому входу второго элемента сравнения, выходом соединенным с силовым преобразователем, подключенным к электродвигателю постоянного тока, соединенному с измерительным блоком, первый выход измерительного блока через безынерционное звено обратной связи по скорости с коэффициентом передачи К1 соединен с первым инвертирующим входом второго элемента сравнения, второй выход измерительного блока через безынерционное звено обратной связи по току с коэффициентом передачи К2 подключен ко второму инвертирующему входу второго элемента сравнения, третий выход измерительного блока через безынерционное звено обратной связи по напряжению с коэффициентом передачи К3 подключен к третьему инвертирующему входу второго элемента сравнения, первый выход измерительного блока через квадратор подключен к блоку вычисления коэффициента e1 и ко второму входу регулятора, к третьему входу которого подключен выход блока вычисления коэффициента e1, при этом блок вычисления коэффициента e1 содержит третий элемент сравнения входом соединенный с формирователем, а выходом с входом усилителя с коэффициентом усиления 1/b0, выход которого является выходом блока вычисления коэффициента e1, а регулятор содержит три интегратора, два блока умножения, четвертый и пятый элементы сравнения и усилитель с коэффициентом е0, регулятор дополнительно содержит усилитель с коэффициентом e2 при этом вход первого интегратора является первым входом регулятора, выход первого интегратора подключен к первому неинвертирующему входу четвертого элемента сравнения, ко второму инвертирующему входу которого подключен первый блок умножения, а к третьему инвертирующему входу четвертого элемента сравнения подключен второй блок умножения, выход четвертого элемента сравнения через второй интегратор подключен к неинвертирующему входу пятого элемента сравнения, выход пятого элемента сравнения, через третий интегратор, выход которого является первым выходом регулятора, соединен с первым входом второго блока умножения, второй вход которого является вторым входом регулятора, со вторым инвертирующим входом пятого элемента сравнения соединен усилитель с коэффициентом e2, вход усилителя с коэффициентом е0, второй вход первого блока умножения и вход усилителя с коэффициентом e2 соединены связью по скорости с первым выходом измерительного блока, первый вход первого блока умножения является третьим входом регулятора, а выход усилителя с коэффициентом е0, являющийся вторым выходом регулятора подключен к первому инвертирующему входу первого элемента сравнения, второй неинвертирующий вход которого является задающим входом устройства, при том вход третьего элемента сравнения является входом блока вычисления коэффициента е1.
Сущность изобретения поясняется графическими материалами.
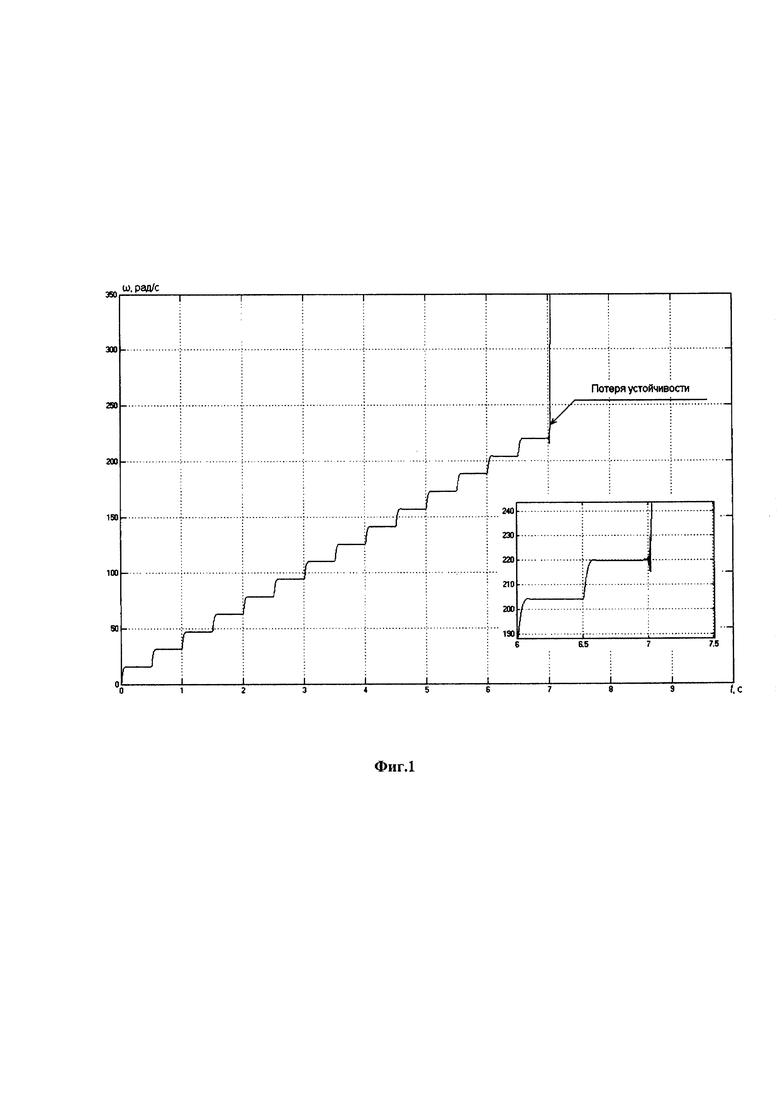
На фиг. 2 изображена блок-схема устройства для осуществления предложенного способа.
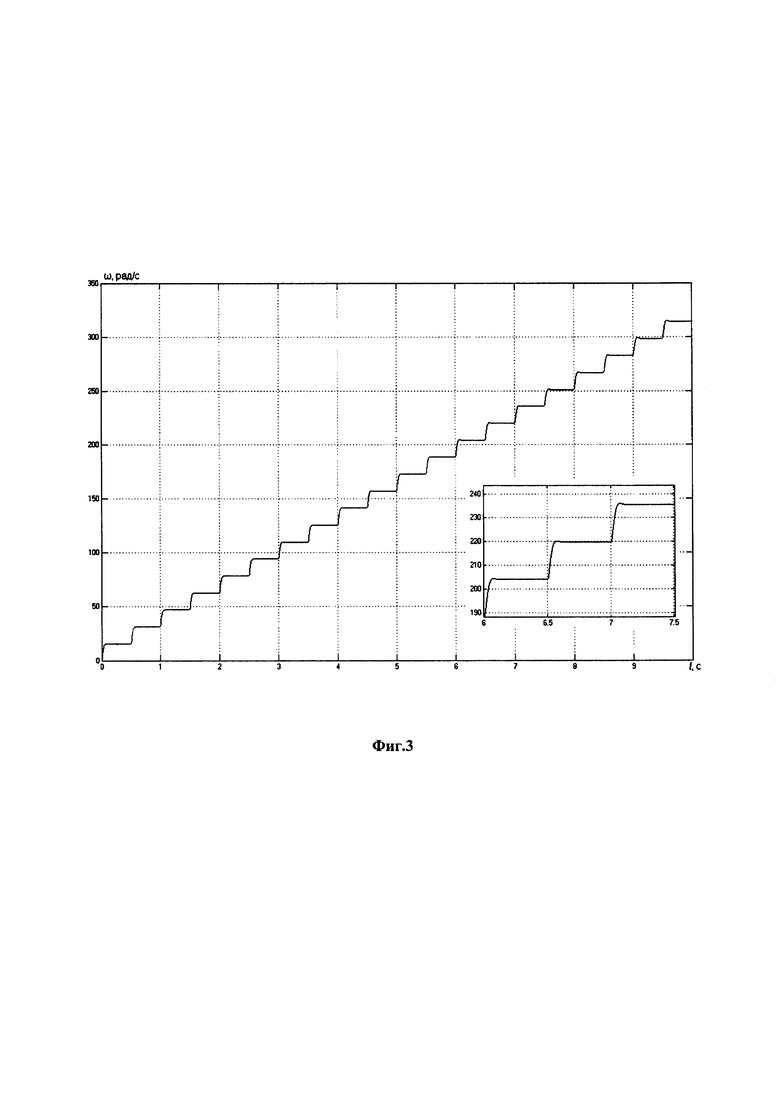
На фиг. 3 приведены каскадные переходные характеристики работы заявляемого устройства в широком диапазоне скоростей.
Для фиг. 2 введены следующие обозначения: первый элемент сравнения 1, регулятор 2, силовой преобразователь 3, электродвигатель постоянного тока 4, измерительный блок 5, второй элемент сравнения 6, безынерционное звено обратной связи по скорости 7 с коэффициентом передачи К1; безынерционное звено обратной связи по току 8 с коэффициентом передачи К2; безынерционное звено обратной связи по напряжению 9 с коэффициентом передачи К3; квадратор 10, блок вычисления коэффициента e1 11, третий элемент сравнения 12, формирователь 13 с коэффициентом d1, усилитель 14 с коэффициентом усиления 1/b0, первый интегратор 15, четвертый элемент сравнения 16, второй интегратор 17, пятый элемент сравнения 18, третий интегратор 19, усилитель 20 с коэффициентом е0, первый блок умножения 21, усилитель 22 с коэффициентом е2, второй блок умножения 23.
Устройство адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей содержит первый элемент сравнения 1. Выход первого элемента сравнения 1 соединен с первым входом регулятора 2. Первый выход регулятора 2 подключен к первому входу второго элемента сравнения 6, выход которого соединен с силовым преобразователем 3. Силовой преобразователь 3 подключен к электродвигателю постоянного тока 4, соединенному с измерительным блоком 5. Первый выход измерительного блока 5 через безынерционное звено обратной связи по скорости 7 с коэффициентом передачи К1 соединен с первым инвертирующим входом второго элемента сравнения 6. Второй выход измерительного блока 5 через безынерционное звено обратной связи по току 8 с коэффициентом передачи К2 подключен ко второму инвертирующему входу второго элемента сравнения 6. Третий выход измерительного блока 5 через безынерционное звено обратной связи по напряжению 9 с коэффициентом передачи К3 подключен к третьему инвертирующему входу второго элемента сравнения 6. Первый выход измерительного блока 5 через квадратор 10 подключен к блоку вычисления коэффициента e1 11 и ко второму входу регулятора 2. К третьему входу регулятора 2 подключен выход блока вычисления коэффициента e1 11. Блок вычисления коэффициента e1 11 содержит третий элемент сравнения 12, инвертирующий вход которого является входом блока вычисления коэффициента e1. Неинвертирующим входом третий элемент сравнения 12 соединен с формирователем 13 с коэффициентом d1, а выходом с входом усилителя 14 с коэффициентом усиления 1/b0. Выход усилителя 14 с коэффициентом усиления 1/b0 является выходом блока вычисления коэффициента e1 11. Регулятор 2 содержит первый интегратор 15, второй интегратор 17, третий интегратор 19, первый блок умножения 21, второй блок умножения 23, четвертый 16 и пятый 18 элементы сравнения и усилитель 20 с коэффициентом е0, усилитель 22 с коэффициентом е2. Вход первого интегратора 15 является первым входом регулятора 2. Выход первого интегратора 15 подключен к первому неинвертирующему входу четвертого элемента сравнения 16. Ко второму инвертирующему входу четвертого элемента сравнения 16 подключен первый блок умножения 21, а к третьему инвертирующему входу четвертого элемента сравнения 16 подключен второй блок умножения 23. Выход четвертого элемента сравнения 16 через второй интегратор 17 подключен к неинвертирующему входу пятого элемента сравнения 18. Выход пятого элемента сравнения 18, через третий интегратор 19, являющийся первым выходом регулятора 2, соединен с первым входом второго блока умножения 23. Второй вход второго блока умножения 23 является вторым входом регулятора 2. Со вторым инвертирующим входом пятого элемента сравнения 18 соединен усилитель 22 с коэффициентом е2. Вход усилителя 20 с коэффициентом е0, второй вход первого блока умножения 21 и вход усилителя 22 с коэффициентом е2 соединены связью по скорости с первым выходом измерительного блока 5. Первый вход первого блока умножения 21 является третьим входом регулятора 2. Выход усилителя 20 с коэффициентом е0, являющийся вторым выходом регулятора 2 подключен к первому инвертирующему входу первого элемента сравнения 1. Второй неинвертирующий вход первого элемента сравнения 1 является задающим входом устройства.
Способ адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей осуществляют следующим образом. Первоначально для выбранной электромеханической системы производят снятие и исследование спектрограммы скоростей. Если спектрограмма была построена ранее, пользуются результатами проведенных исследований. На спектрограмме выделяют частоту наиболее существенного воздействия, которое приводит к возникновению доминирующего гармонического возмущения момента нагрузки на валу рабочего органа. По известной кинематической схеме механизма и выявленной частоте находят соответствующую угловую скорость электродвигателя ω, которая позволяет вычислить математическую модель наиболее существенного возмущения, соответствующую уравнению (3). Для организации процесса управления в состав системы кроме внешнего контура регулирования по основной координате (в данном случае - по скорости электродвигателя постоянного тока 4) организуют внутренний контур регулирования. Как и в случае способа - прототипа полученная модель возмущения вводится сомножителем в знаменатель передаточной функции регулятора 2, являющегося регулятором внешнего контура по скорости. После этого приступают к синтезу регулятора.
Синтез регулятора проводится в два этапа в направлении от внутреннего контура к внешнему. На первом этапе находят коэффициенты полинома передаточной функции внутреннего контура регулирования, причем осуществляют это по заданному желаемому полиному передаточной функции внутреннего контура регулирования и среднегеометрическому корню характеристического полинома внутреннего контура регулирования, соответствующего быстродействию в 5-7 раз превышающему заданные динамические требования к системе. А именно, синтезируют безынерционный регулятор состояния внутренней подсистемы с высоким быстродействием (7 мс). Для чего рассчитываются коэффициенте обратных связей по скорости К1=-13,53, по току К2=-0,316 и по напряжению К3=-0,066.
На втором этапе формируют полином регулятора внешнего контура по скорости рабочего органа с учетом заданного быстродействия системы, при этом структуру регулятора внешнего контура, содержащего модель возмущения, реализуют в объединенной канонической форме наблюдаемости. А именно, составляют уравнение синтеза регулятора внешнего контура, включающего модель возмущения. Причем высокое быстродействие внутренней подсистемы дает основание считать ее безынерционной с коэффициентом усиления b0 при решении этого уравнения.
Реализация регулятора внешнего контура в объединенной канонической форме наблюдаемости позволяет исключить из каналов адаптации регулятора внешнего контура неустойчивые префильтры и тем самым кардинально улучшить качество управления, что было невозможно осуществить в прототипе при использовании для технической реализации и параметрической самонастройки представление управляющих устройств с использованием канонической формы управляемости,
В результате решения уравнения синтеза регулятора внешнего контура, получаем выражения:


которые являются соответственно числителем передаточной функции регулятора 2 и знаменателем передаточной функции регулятора 2. Это позволяет реализовать регулятор 2 в виде цифровых или аналоговых блоков, выполняющих математические преобразования с учетом текущего значения ω.
Коэффициенты полиномов передаточных функций регулятора E(s) и F(s) принимают вид






где коэффициенты d0, d1 и d2 находятся по желаемому характеристическому полиному синтезируемой системы D(s) с подстановкой конкретного значения Ω0, соответствующего заданному быстродействию.
Для конкретных значений параметров объекта, приведенных выше, и среднегеометрическом корне Ω0=120 с-1 желаемого характеристического полинома внешнего контура, получаем следующие численные выражения полиномов регулятора

Зависимость частоты гармонического возмущения от угловой скорости рабочего органа ω определяет необходимость адаптации регулятора с внутренней моделью к изменениям скоростного режима электромеханической системы. При этом текущее значение скорости рабочего органа вводится в регулятор с внутренней моделью возмущения как переменная, в зависимости от которой перестраивается коэффициент е1(ω) регулятора 2, синтезированного с учетом модели возмущения.
В случае изменения задающего воздействия Uωз в широком диапазоне, например при необходимости изменения производительности технологического оборудования, регулятор отработает это изменение. Угловая скорость ω изменится, что автоматически повлечет за собой изменение частоты вынужденных колебаний момента нагрузки. В случае отсутствия возможности адаптации эти колебания гасятся системой неэффективно, что приводит к возникновению динамической ошибки и снижению точности системы. Использование предложенного способа позволяет исключить неустойчивые префильтры из каналов адаптации устройства управления и тем самым не только упростить устройство, но и повысить степень устойчивости системы.
Сигнал задания на скорость Uωз поступает на первый элемент сравнения 1, на инвертирующий вход которого подается сигнал обратной связи по скорости, умноженный на величину коэффициента е0. Полученная на первом элементе сравнения 1 разность ΔUωз проходит через регулятор 2, образующий внешний контур регулирования с передаточной функцией 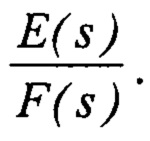 При этом коэффициент e1(ω) полинома E(s) имеет значение, соответствующие текущему уровню угловой скорости ω, а полином F(s), зависящий от ω, претерпевает непрерывные изменения. Сигнал разницы скоростей UΔω, поступая на регулятор 2 с внутренней моделью возмущения, которая стоит в прямом канале системы, формирует на его выходе напряжение управления Uy, настроенное на отработку синусоидального внешнего возмущения заданной частоты и подготовленное для участия в регулировании скорости электродвигателя 4 внутренним контуром управления. Сигнал Uy, сформированный после регулятора 2, поступает на неинвертирующий вход второго элемента сравнения 6 внутреннего безынерционного контура регулирования скорости, где происходит стабилизация скорости ω. Поскольку коэффициенты K1, К2 и К3 выбраны с учетом заданных параметров системы, стабилизация выходного параметра происходит в широком диапазоне изменения задающих напряжений.
При этом коэффициент e1(ω) полинома E(s) имеет значение, соответствующие текущему уровню угловой скорости ω, а полином F(s), зависящий от ω, претерпевает непрерывные изменения. Сигнал разницы скоростей UΔω, поступая на регулятор 2 с внутренней моделью возмущения, которая стоит в прямом канале системы, формирует на его выходе напряжение управления Uy, настроенное на отработку синусоидального внешнего возмущения заданной частоты и подготовленное для участия в регулировании скорости электродвигателя 4 внутренним контуром управления. Сигнал Uy, сформированный после регулятора 2, поступает на неинвертирующий вход второго элемента сравнения 6 внутреннего безынерционного контура регулирования скорости, где происходит стабилизация скорости ω. Поскольку коэффициенты K1, К2 и К3 выбраны с учетом заданных параметров системы, стабилизация выходного параметра происходит в широком диапазоне изменения задающих напряжений.
Предлагаемый способ, предполагающий коррекцию коэффициентов регулятора, отрабатывает возникающие в процессе регулирования ω переменные по частоте колебания момента нагрузки в широком диапазоне изменения задающих воздействий. Это наглядно видно на примере переходной характеристики, приведенной на фиг. 3, снятой путем компьютерного моделирования системы при воздействии гармонических колебаний момента нагрузки с параметрами модели возмущения М0=41.1Н⋅м, M1=8.22 Н⋅м и назначении среднегеометрического корня Ω0=120 с-1 в распределении Ньютона, обеспечивающем быстродействие системы на уровне 50 мс. Система эффективно отрабатывает приложенный гармонический момент нагрузки. Колебаний скорости после внешнего воздействия не наблюдается, во всем широком диапазоне изменения выходных скоростей система не теряет устойчивости, что выгодно отличает ее от прототипа.
Предложенный способ адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей подстраивается к изменениям нагрузки и не теряет своей устойчивости даже при существенном изменении скорости объекта управления, что повышает точность системы.
Устройство адаптивного управления электромеханической системой с гармоническим моментом нагрузки в широком диапазоне скоростей работает следующим образом. По данным предварительного синтеза передаточной функции регулятора 2, представляющего собой звено с передаточной функцией E(s)/F(s) и предназначенного для минимизации влияния внешнего гармонического воздействия со стороны нагрузки и отработки управляющего воздействия Uωз на объект управления, производят настройку блока вычисления коэффициента e1 11, устанавливая коэффициенты усиления формирователя 13, а также усилителя 14, такими, как указано на фиг. 2. Для усилителя 14 фиксируют заданный коэффициент усиления 1/b0. Формирователь 13 настраивают на коэффициент d1. Аналогичную операцию предустановки на значение е0 осуществляют со усилителем 20 и с усилителем 22, коэффициент усиления которого необходимо установить величиной е2. Конкретные значения коэффициентов b0, е0, d1, е2 выбираются так, как представлено при описании работы заявляемого способа. Это соответствует выполнению условий, заданных уравнениями (14-19). При этом регулятор 2 настроен на компенсацию возникающих гармонических колебаний момента нагрузки. Регулятор 2 так же имеет возможность перестройки своей передаточной функции при изменении скоростей электродвигателя постоянного тока 4 и рабочего органа за счет введенных элементов. Система готова к работе.
Допустим, требуемая скорость рабочего органа ω электромеханической системы равна той, которая вызывает наиболее значимые гармонические колебания момента нагрузки на валу. В начальный момент пуска электродвигатель постоянного тока 4 и жестко связанный с ним рабочий орган начинают изменять свои скорости с нуля. Первый элемент сравнения 1, вырабатывающий на выходе сигнал ошибки ΔUωз, представляющей собой разность сигналов Uωз и сигнала e0Uω с выхода второго усилителя 20 с коэффициентом е0, подает на вход регулятора 2 наибольшее напряжение ΔUωз. Регулятор 2, выполненный в виде звена с передаточной функцией E(s)/F(s) может быть реализован в виде цифровых или аналоговых блоков, внутренние параметры которых рассчитаны в процессе конструирования системы управления, исходя из известных зависимостей полиномов передаточных функций от угловой скорости рабочего органа ω, как это представлено ранее для заявляемого способа. В начальный момент пуска отрицательные обратные связи внутреннего контура по току, напряжению и скорости отсутствуют, напряжение ΔUy максимально. Силовой преобразователь 3 переводит свой входной сигнал ΔUy в напряжение U на якорной обмотке электродвигателя постоянного тока 4. Это соответствует нарастанию напряжения U на якорной обмотке электродвигателя постоянного тока 4 и он начинает разгоняться. Появляются сигналы на входах измерительного блока 5, выполненного с возможностью измерения напряжения на выходе силового преобразователя 3, скорости и тока двигателя постоянного тока 4. Для этого сигнал о скорости электродвигателя постоянного тока 4 соединен с первым входом измерительного блока 5, сигнал о токе электродвигателя постоянного тока 4 подключен ко второму входу измерительного блока 5, а сигнал о напряжении с выхода силового преобразователя 3 поступает на третий вход измерительного блока 5. Кроме этого в системе имеются безынерционное звено 7 обратной связи по скорости с коэффициентом передачи К1, безынерционное звено 8 обратной связи по току с коэффициентом передачи К2 и безынерционное звено 9 обратной связи по напряжению с коэффициентом передачи К3. Их назначение - подключать соответствующие сигналы, информирующие систему об основных параметрах, характеризующих работу системы (скорость и ток электродвигателя постоянного тока 4, напряжение силового преобразователя 3) к соответствующим инвертирующим входам второго элемента сравнения 6. В процессе пуска обратные связи по току, напряжению и скорости внутреннего контура обеспечивают требуемое быстродействие, исключая перерегулирование при выходе системы на заданную скорость.
После пуска на выбранную скорость вала электродвигателя постоянного тока 4, которая в данном техническом решении может быть любой, появление на валу внешнего гармонического возмущающего воздействия момента нагрузки, частота которого жестко связана с заданной скоростью и может изменяться, эффективно отрабатывается введенными элементами и связями между ними.
Так, при достижении заданной скорости вала электродвигателя постоянного тока 4 квадратор 10 по информации о ω, поступающей с первого выхода измерительного блока 5, вырабатывает на своем выходе сигнал Uω2. Этот сигнал необходим для корректировки зависящего от ω2 коэффициента e1, а также передаточной функции регулятора 2.
Поступая на вход блока вычисления e1 11, напряжение Uω2 появляется на инвертирующем входе третьего элемента сравнения 12, на неинвертирующий вход которого поступает информация от формирователя 13, который генерирует сигнал, равный d1. На выходе третьего элемента сравнения 12 образуется разность сигналов, поступающая на вход усилителя 14 с коэффициентом 1/b0. Его коэффициент усиления равен 1/b0 и выбирается на основании результатов проведенного заранее синтеза полиномов передаточной функции регулятора 2. Полученное значение e1, поступая на первый вход первого блока умножения 21, корректирует передаточную функцию регулятора 2. Тем самым производится адаптация системы к выбранному значению скорости, что позволяет корректировать полином регулятора 2 и настраивать его при изменении угловой скорости рабочего органа, адаптируя систему к возникновению колебаний момента нагрузки и исключая вынужденные колебания скорости в широком диапазоне частот, как это предусмотрено выражением (20).
Часть элементов регулятора 2 не изменяют своих свойств при изменении скорости ω. К таким элементам относятся второй усилитель 20 с коэффициентом е0, первый блок умножения 21, усилитель 22 с коэффициентом е2 и второй блок умножения 23. Их параметры не зависят от ω и выбираются на основании результатов проведенного заранее синтеза регулятора 2. При реализации передаточной функции регулятора 2 значение сигнала Uω2 поступает с выхода квадратора 10 на первый вход второго блока умножения 23, приводя передаточную функцию регулятора 2 в соответствие выбранному значению скорости двигателя постоянного тока 4. Элементы 15-19 реализуют передаточную функцию регулятора 2, адаптированную под текущее значение ω, что позволяет эффективно подавлять различные частоты, появляющиеся в возмущающем гармоническом моменте нагрузки при регулировании скорости.
Если скорость электродвигателя постоянного тока 4 изменится (например, под действием нового задающего воздействия, отличного от ранее рассмотренного), система отработает это изменение, установив новые значения коэффициентов передаточных функций E(s) и F(s) регулятора 2. При этом эффективность работы системы не нарушается и она успешно отрабатывает влияние нового возмущающего гармонического момента нагрузки.
Предлагаемый способ и устройство для его осуществления позволяют увеличить устойчивость системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2008 |
|
RU2370878C1 |
| Система автоматического управления нестационарным объектом | 1986 |
|
SU1409967A1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2393620C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2010 |
|
RU2417511C1 |
Группа изобретений относится к области управления электромеханическими системами. Технический результат - увеличение устойчивости в широком диапазоне скоростей. Способ заключается в исследовании спектрограммы скоростей электромеханической системы, выделении частоты наиболее существенного возмущения, вычислении полинома, формирующего математическую модель возмущения, и введении этого полинома сомножителем в знаменатель передаточной функции регулятора, и синтезе коэффициентов обратных связей, на первом этапе настройки передаточных функций элементов находят коэффициенты полинома передаточной функции внутреннего контура регулирования, а на втором этапе формируют полином регулятора внешнего контура по скорости рабочего органа с учетом заданного быстродействия системы, при этом структуру регулятора внешнего контура, содержащего модель возмущения, реализуют в объединенной канонической форме наблюдаемости. Устройство содержит регулятор, силовой преобразователь, электродвигатель постоянного тока, первый и второй элементы сравнения, три безынерционных звена обратных связей по напряжению, току и скорости, квадратор, блок вычисления e1. 2 н.п. ф-лы, 3 ил.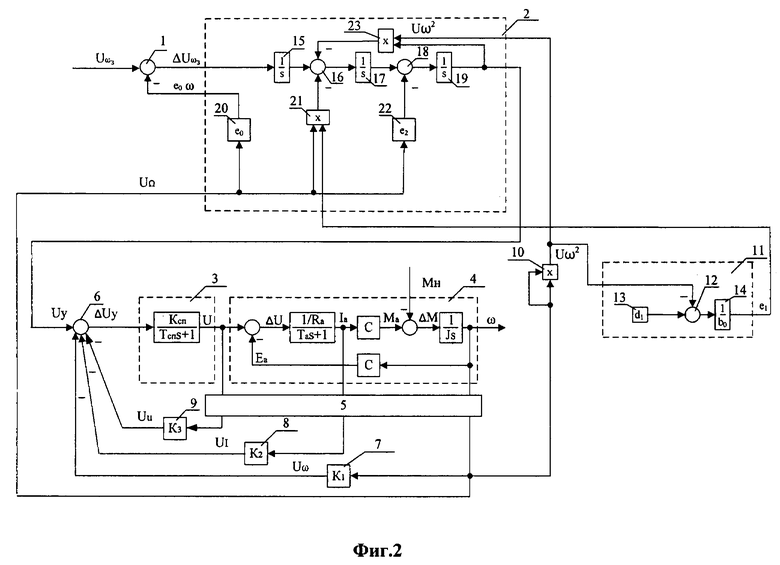
1. Способ адаптивного управления электромеханической системой с гармоническим моментом нагрузки, заключающийся в том, что управление осуществляют регулятором по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, вводят этот полином сомножителем в знаменатель передаточной функции регулятора внешнего контура по скорости рабочего органа, колебания момента нагрузки дополнительно компенсируют по внутреннему контуру, представляющему собой обратные связи по напряжению, скорости и току, передаточные функции элементов системы настраивают в два этапа, причем по результатам измерения скорости рабочего органа постоянно корректируют коэффициент e1 передаточной функции регулятора внешнего контура, отличающийся тем, что передаточные функции регуляторов внешнего и внутреннего контуров формируют в направлении от внутреннего контура к внешнему, для чего на первом этапе находят коэффициенты полинома передаточной функции внутреннего контура регулирования, причем осуществляют это по заданному желаемому полиному передаточной функции внутреннего контура регулирования и среднегеометрическому корню характеристического полинома внутреннего контура регулирования, соответствующего быстродействию, в 5-7 раз превышающему заданные динамические требования к системе, а на втором этапе полином регулятора внешнего контура по скорости рабочего органа формируют с учетом заданного быстродействия системы, при этом структуру регулятора внешнего контура, содержащего модель возмущения, реализуют в объединенной канонической форме наблюдаемости.
2. Устройство адаптивного управления электромеханической системой с гармоническим моментом нагрузки, содержащее первый элемент сравнения, выход которого соединен с первым входом регулятора, первый выход которого подключен к первому входу второго элемента сравнения, выходом соединенного с силовым преобразователем, подключенным к электродвигателю постоянного тока, соединенному с измерительным блоком, первый выход измерительного блока через безынерционное звено обратной связи по скорости с коэффициентом передачи К1 соединен с первым инвертирующим входом второго элемента сравнения, второй выход измерительного блока через безынерционное звено обратной связи по току с коэффициентом передачи К2 подключен ко второму инвертирующему входу второго элемента сравнения, третий выход измерительного блока через безынерционное звено обратной связи по напряжению с коэффициентом передачи К3 подключен к третьему инвертирующему входу второго элемента сравнения, первый выход измерительного блока через квадратор подключен к блоку вычисления коэффициента e1 и ко второму входу регулятора, к третьему входу которого подключен выход блока вычисления коэффициента e1, при этом блок вычисления коэффициента e1 содержит третий элемент сравнения, входом соединенный с формирователем, а выходом с входом усилителя с коэффициентом усиления 1/b0, выход которого является выходом блока вычисления коэффициента e1, а регулятор содержит три интегратора, два блока умножения, четвертый и пятый элементы сравнения и усилитель с коэффициентом е0, отличающееся тем, что регулятор дополнительно содержит усилитель с коэффициентом е2, при этом вход первого интегратора является первым входом регулятора, выход первого интегратора подключен к первому неинвертирующему входу четвертого элемента сравнения, ко второму инвертирующему входу которого подключен первый блок умножения, а к третьему инвертирующему входу четвертого элемента сравнения подключен второй блок умножения, выход четвертого элемента сравнения через второй интегратор подключен к неинвертирующему входу пятого элемента сравнения, выход пятого элемента сравнения, через третий интегратор, выход которого является первым выходом регулятора, соединен с первым входом второго блока умножения, второй вход которого является вторым входом регулятора, со вторым инвертирующим входом пятого элемента сравнения соединен усилитель с коэффициентом е2, вход усилителя с коэффициентом е0, второй вход первого блока умножения и вход усилителя с коэффициентом е2 соединены связью по скорости с первым выходом измерительного блока, первый вход первого блока умножения является третьим входом регулятора, а выход усилителя с коэффициентом е0, являющийся вторым выходом регулятора, подключен к первому инвертирующему входу первого элемента сравнения, второй неинвертирующий вход которого является задающим входом устройства, притом вход третьего элемента сравнения является входом блока вычисления коэффициента е1.
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| АДАПТИВНО-РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО НЕОПРЕДЕЛЕННЫХ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2540848C2 |
| CN 101174807 B, 09.03.2011. | |||

