Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, например электроприводов постоянного и переменного тока.
Существует ряд технических объектов, приводимых в движение средствами автоматизированного электропривода, наличие дефектов в изготовлении механической части которых (например, эксцентриситета валов рабочих органов и систем передач движения) приводит к возникновению гармонических колебаний статического момента нагрузки на валу рабочих органов. При этом частота таких колебаний жестко связана со скоростью электродвигателя, когда момент нагрузки на валу рабочего органа Мн(t) можно представить в виде:

где М0 - постоянная составляющая момента; M1 - амплитуда колебаний момента; ω1 - скорость рабочего органа; t - время.
Для возмущающего воздействия (1), состоящего из постоянной и гармонической составляющих, соответствующее изображение Лапласа имеет вид

где s - комплексная переменная Лапласа;  ; Ω - частота вращения электродвигателя; i - передаточное отношение редуктора.
; Ω - частота вращения электродвигателя; i - передаточное отношение редуктора.
Минимизация последствий подобных возмущений позволяет значительно улучшить показатели качества систем автоматического управления скоростными режимами технологических установок. Снижение флуктуаций момента нагрузки и, как следствие, скорости рабочих органов технологических машин оказывает существенное влияние на качество выпускаемой продукции. При этом увеличивается точность изготовления деталей при металлообработке, стабилизируются геометрические размеры длинномерных материалов при обработке в поточных линиях (диаметр волокна или провода, толщина пленки и различных покрытий), нормируются их весовые показатели (плотность бумаги, ткани и др.), улучшается светопропускание оптических световодов и т.п.
Известен «Способ каскадного автоматического регулирования» (источник - патент РФ №2127895, МПК 6 G05B 13/02, год опубликования 1999), заключающийся в том, что осуществляют измерение вспомогательного параметра объекта и стабилизацию его с помощью одноконтурной системы регулирования, измерение основного параметра объекта, стабилизации его с помощью астатической одноконтурной системы регулирования и формирования сигнала задания регулятору внутреннего контура, при этом устанавливают сигналы задания верхнего и нижнего допустимых значений вспомогательного параметра объекта для регулятора внутреннего контура и определяют на заданном интервале ошибку рассогласования для астатического регулятора внешнего контура, воздействующего посредством исполнительного устройства на объект в заданном интервале с помощью аналогового сигнала, определяемого законом регулирования астатического регулятора внешнего контура, при выходе вспомогательного параметра объекта из заданного интервала с выхода регулятора внутреннего контура на исполнительное устройство подают управляющее воздействие релейного типа со знаком, уменьшающим отклонение вспомогательного параметра объекта от верхнего и нижнего допустимых значений, а основного параметра объекта - от заданного значения, и одновременно отключают управляющее воздействие астатического регулятора внешнего контура, формируют и сохраняют интегральную составляющую этого регулятора на уровне значения средней позиции выходного сигнала регулятора внутреннего контура, при возврате вспомогательного параметра объекта в заданный интервал одновременно отключают управляющее воздействие регулятора внутреннего контура и включают управляющее воздействие астатического регулятора внешнего контура.
Способ решает поставленные перед ним задачи, но будучи построенным на релейном принципе работы, в некоторых случаях (например, при гармоническом виде возмущений) может привести к возникновению режима автоколебаний. Кроме этого, способ теряет свою работоспособность при отсутствии возможности измерения вспомогательного параметра, который в данном случае должен быть представлен моментом нагрузки на валу двигателя электромеханической системы.
Известен способ регулирования скорости и тока в электромеханической системе с электроприводом постоянного тока (источник - книга Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода: Учеб. пособие для вузов. – М.: Энергия, 1979. - 616 с. (стр. 280, рис. 6-15)). Способ является примером построения системы подчиненного регулирования и заключается в том, что регулирование нескольких переменных в системе электропривода производят путем измерения скорости и тока двигателя постоянного тока, сравнения измеренного значения скорости с заданным и подачи сигнала рассогласования на регулятор скорости. Результирующее значение на выходе регулятора скорости считают задающим для регулятора тока, на который подают сигнал обратной связи по току. При этом влияние возможных колебаний момента нагрузки на вал исполнительного двигателя постоянного тока оценивают путем измерения выходного параметра (в данном случае - скорости). Тем самым компенсацию возмущения осуществляют после его воздействия на выходной параметр.
Способ выполняет возложенные на него функции, но имеет существенный недостаток, заключающийся в том, что при необходимости компенсации влияния флуктаций момента нагрузки на выходную переменную (скорость исполнительного механизма) приходится значительно повышать быстродействие (динамическую точность) системы путем повышения коэффициента петлевого усиления. Это может привести к существенному ухудшению качества отработки управляющего воздействия или повышению токовых форсировок и соответствующему сокращению размеров линейной зоны работы системы, имеющей ограничение мощности силовых исполнительных органов.
Наиболее близким к заявляемому является известный способ компенсации возмущений в установившемся режиме, именуемый как «принцип внутренней модели» (источник - книга Гудвин Г.К. Проектирование систем управления / Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с. (стр. 284-285)), который заключается в том, что управление осуществляют регулятором по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы, выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, вводят этот полином сомножителем в знаменатель передаточной функции регулятора по скорости рабочего органа, а искажение передаточной функции электромеханической системы по управлению устраняют за счет воздействия внеконтурного формирователя.
При этом выходной сигнал регулятора по скорости рабочего органа будет содержать гармоническую составляющую, которая благодаря действию отрицательной обратной связи по скорости рабочего органа, замыкающей внешний контур регулирования, обеспечит противофазную компенсацию возмущения. Следует отметить, что регулятор и внеконтурный формирователь реализованы в виде материальных объектов (цифровых или аналоговых блоков), которые при наладке требуют установки внутренних параметров, соответствующих полиномам, синтезированным в процессе конструирования системы управления. Способ, выбранный за прототип, выполняет свои основные функции, требует измерения лишь выходной координаты объекта управления - угловой скорости вала рабочего органа.
Основными недостатками предложенного технического решения являются недостаточная динамическая точность и высокие аппаратные или программные ресурсы, необходимые для реализации системы.
Известна следящая система автоматического управления с компенсацией неизмеряемых возмущений (патент РФ №2051401, МПК 6 G05B 11/01, год опубликования 1995). Следящая система содержит блок идентификации и формирования сигналов для компенсации возмущений и первый сумматор, причем выходы первого сравнивающего устройства и блока идентификации и формирования сигналов для компенсации возмущений подключены соответственно к первому и второму входам первого сумматора, выход которого связан с входом усилителя и первым входом блока идентификации и формирования сигналов для компенсации возмущений, к остальным входам которого подсоединены выходы соответственно усилителя, второго сравнивающего устройства, последовательного корректирующего устройства, усилителя мощности и датчика обратной связи.
Устройство выполняет свои основные функции, но обладает недостатком, присущим всем системам с наблюдателем Люенбергера, который является основой построения блока идентификации - низкой параметрической робастностью. Даже незначительная вариация параметров объекта управления, входящих в математическую модель, являющуюся основой блока идентификации, приводит к резкому снижению качественных показателей системы управления.
Известна самонастраивающаяся система комбинированного регулирования (патент РФ №2022313, МПК 6 G05B 13/00, год опубликования 1994), содержащая регулятор, сумматоры, измеритель рассогласования, блок самонастройки, корректирующий фильтр, блоки умножения, управляемые ключи, блок памяти. Разомкнутый контур управления системы предназначен для компенсации контролируемых возмущений. Замкнутый контур регулирования формирует управление на основе результирующего отклонения выхода объекта от уставки. Блок самонастройки системы предназначен для работы в условиях редкоизмеряемого выхода объекта. Он повышает качество работы обоих контуров системы за счет стабилизации их коэффициентов передачи.
Система решает поставленные задачи, однако обладает рядом существенных недостатков. Во-первых, в состав устройства-аналога необходимо ввести датчик контролируемого внешнего возмущения, что в ряде случаев затруднительно (в частности, при воздействии на электромеханическую систему такого возмущения, как момент статического сопротивления на валу электродвигателя). Во-вторых, наличие в контуре обратной связи блоков, производящих сложный логический анализ информации, элементов записи и хранения, блока задержки усложняет устройство и резко ухудшает его быстродействие. В-третьих, принцип работы блока самонастройки предполагает наличие временного интервала, когда управляющие и возмущающие воздействия системой игнорируются.
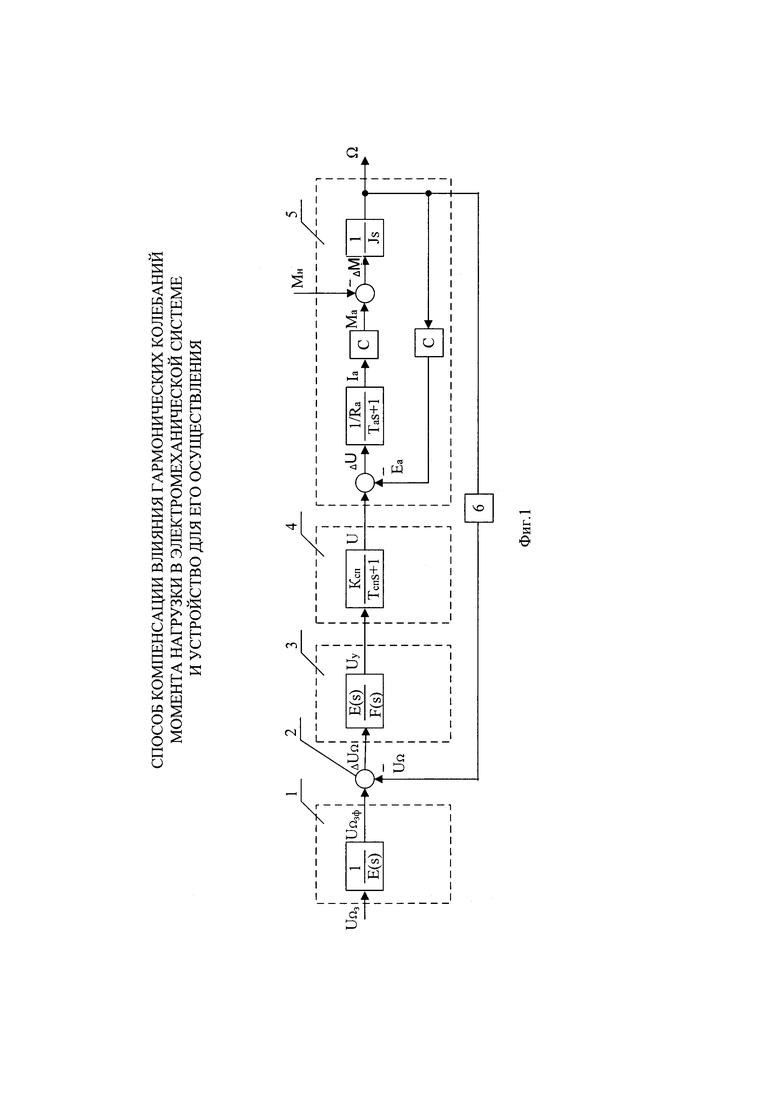
Наиболее близким к предлагаемому является устройство для компенсации возмущений (Гудвин Г.К. Проектирование систем управления / Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с, рис. 10.1). Структурная схема, иллюстрирующая работу способа и устройства-прототипа применительно к электромеханической системе с двигателем постоянного тока, приведена на фиг. 1. В состав структурной схемы введены внеконтурный формирователь 1, представляющий собой префильтр и предназначенный для устранения искажения передаточной функции электромеханической системы по управлению; первый элемент сравнения 2, который формирует на своем выходе сигнал ошибки, управляющий регулятором 3. Регулятор 3 замыкает отрицательную обратную связь по скорости рабочего органа и выполнен в виде блока, передаточная функция которого представляется отношением полиномов. Кроме этого, в составе системы имеется силовой преобразователь 4, который преобразует напряжение управления Uy на своем входе в напряжение U на якорной обмотке электродвигателя постоянного тока 5. Измерительный блок 6 предназначен для измерения скорости электродвигателя постоянного тока 5. Регулятор 3 и внеконтурный формирователь 1 реализованы в виде материальных объектов (цифровых или аналоговых блоков), которые при наладке требуют установки внутренних параметров, соответствующих полиномам, синтезированным в процессе конструирования системы управления.
В качестве основных параметров, влияющих на работоспособность системы, часть из которых приведена на фиг. 1, выбраны:
 - напряжение, определяющее заданное значение скорости рабочего органа;
- напряжение, определяющее заданное значение скорости рабочего органа;
 - напряжение после внеконтурного формирователя;
- напряжение после внеконтурного формирователя;
Uy, U - управляющее и выходное напряжение силового преобразователя;
Ia - ток якорной цепи электродвигателя постоянного тока;
Ω - угловая скорость вала электродвигателя постоянного тока;
ΩН - номинальная угловая скорость вала электродвигателя постоянного тока;
МН - момент нагрузки (статического сопротивления).
Также здесь и далее приняты следующие обозначения параметров системы:
КСП и ТСП - коэффициент передачи и постоянная времени силового преобразователя;
Ra и Та - активное сопротивление и постоянная времени якорной цепи электродвигателя постоянного тока;
С - конструктивная постоянная двигателя постоянного тока;
J - суммарный момент инерции ротора двигателя постоянного тока и рабочего органа;
i - передаточное отношение редуктора.
Система имеет полиномиальный регулятор 3, в знаменатель передаточной функции которого введена, как показано выше, модель возмущения. Попытаемся синтезировать структуру регулятора 3 для электромеханической системы, построенной с применением двигателя постоянного тока 5, управляемого от силового преобразователя 4.
Для конкретности приняты следующие значения параметров объекта: КСП=22, ТСП=0,001 с, Ra=0,177 Ом, Та=0,02 с, Ωн=157 рад/с, С=1,37 Вб, J=0,2 кг⋅м2, i=10.
Пусть требуется обеспечить пуск электромеханической системы (ЭМС) на заданный уровень скорости Ω вала двигателя постоянного тока 5, равный 15,7 рад/с, что составляет 10% от номинальной скорости при монотонном характере переходного процесса и времени нарастания переходной характеристики системы в линейной зоне ее работы не более 50 мс. После пуска системе необходимо отработать возмущающее воздействие момента нагрузки, соответствующее уравнению (1) вида
при отсутствии перерегулирования, обеспечив заданное быстродействие и нулевую статическую ошибку по скорости от действия момента нагрузки.
Согласно принципу селективной инвариантности полином, формирующий математическую модель возмущения (1), определяется в данном случае в виде

где s - комплексная переменная Лапласа, ω1=Ω/i - угловая скорость рабочего органа. Этот полином вводится сомножителем в знаменатель передаточной функции (ПФ) регулятора 3, а искажение передаточной функции ЭМС по управлению устраняется соответствующим внеконтурным формирователем 1. Регулятор 3 с такой моделью возмущения приобретает интегральную s и колебательную (s2+ω12) составляющие, которые в условиях действия отрицательной обратной связи (ОС) в совокупности обеспечивают астатизм 1-го порядка, т.е. нулевую статическую ошибку от действия постоянной составляющей момента, и противофазную компенсацию его гармонической составляющей в установившемся режиме работы. Появление дополнительных нулей ПФ системы по управляющему воздействию устраняется соответствующим внеконтурным формирователем 1 (префильтром).
Объектом управления в данной системе являются последовательно соединенные силовой преобразователь 4 и электродвигатель постоянного тока 5. Передаточная функция объекта управления может быть представлена в виде отношения полиномов B(s) и A(s).
Для повышения робастных свойств синтезируемых систем автоматического управления (исключения появления положительных ОС или неминимально-фазовых звеньев в составе регуляторов) пренебрежем в расчетах относительно малой постоянной времени ТСП. В результате этого ПФ объекта управления принимает вид с передаточной функцией

Для полученной ПФ объекта управления по правилам полиномиального модального управления рассчитывают регулятор, используя уравнение

где E(s) и s⋅F(s) - полиномы числителя и знаменателя ПФ регулятора, причем F(s)=G(s)⋅V(s), V(s) - вспомогательный полином, обеспечивающий техническую реализуемость регулятора, D(s) - желаемый характеристический полином (ХП) синтезируемой системы.
Для этого в соответствии с заданными требованиями динамики формируют структуру и определяют параметры регулятора 3

Использование передаточной функции объекта управления обеспечивает более полный учет его особенностей и способствует повышению помехоустойчивости и параметрической грубости системы.
Как видно из приведенного соотношения, порядок регулятора 3 с учетом внеконтурного формирователя 1 - восьмой. Это подтверждает наличие у прототипа недостатка в виде повышенной сложности при технической реализации как в цифровой, так и в аналоговой форме, что неизбежно приводит к высоким аппаратным или программным затратам.
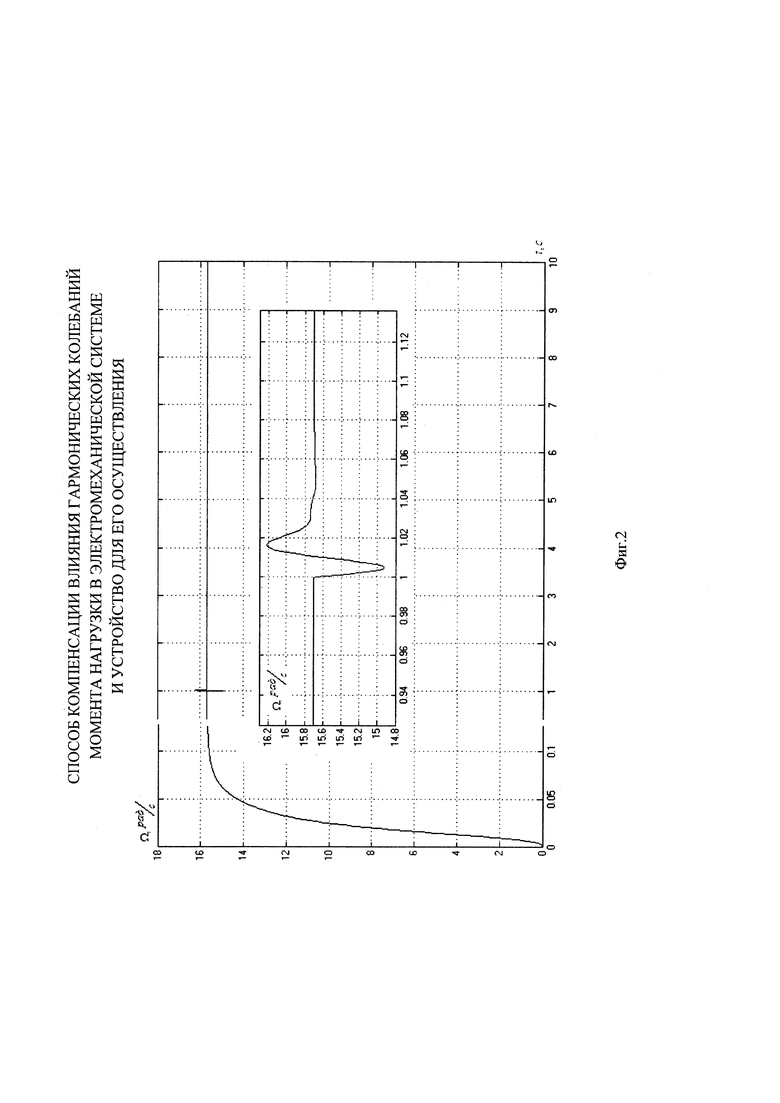
На фиг. 2 приведены результаты проведенного компьютерного моделирования прототипа с синтезированным регулятором 3. Они представлены переходным процессом угловой скорости Ω вала электродвигателя постоянного тока 5. Осуществляется пуск электродвигателя постоянного тока 5 на заданную скорость Ω, равную 10% от номинальной, что при известных параметрах системы составляет 15,7 рад/с. С учетом выбранного передаточного отношения редуктора i=10 это соответствует угловой скорости рабочего органа ω1=1,57 рад/с. После завершения переходного процесса пуска к валу электродвигателя постоянного тока 5 прикладывается момент нагрузки Мн выбранного вида  . Здесь и далее внешнее возмущение в виде изменения момента нагрузки воздействует на вал электродвигателя в момент t=1 с. Анализ переходной характеристики указывает на удовлетворительное качество процесса пуска. Система обеспечивает заданное время нарастания переходной характеристики в линейной зоне ее работы не более 50 мс при отсутствии перерегулирования. При воздействии внешнего возмущения обеспечивается достаточное быстродействие, но наблюдается значительная динамическая ошибка 0,82 рад/с при отработке наброса момента нагрузки заданного вида.
. Здесь и далее внешнее возмущение в виде изменения момента нагрузки воздействует на вал электродвигателя в момент t=1 с. Анализ переходной характеристики указывает на удовлетворительное качество процесса пуска. Система обеспечивает заданное время нарастания переходной характеристики в линейной зоне ее работы не более 50 мс при отсутствии перерегулирования. При воздействии внешнего возмущения обеспечивается достаточное быстродействие, но наблюдается значительная динамическая ошибка 0,82 рад/с при отработке наброса момента нагрузки заданного вида.
Итак, выполняя возложенные на нее задачи, система демонстрирует недостаточную динамическую точность, обладает повышенной сложностью технической реализации регулятора. Последнее требует больших аппаратных или программных затрат при построении регулятора восьмого порядка как в аналоговой, так и в цифровой формах, снижает надежность системы, создает дополнительные проблемы при настройке системы на реальном объекте.
Технический результат предлагаемого изобретения заключается в улучшении динамической точности и сокращении аппаратных или программных затрат при технической реализации системы.
Такой результат достигается за счет того, что в способе компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе управление осуществляют внешним контуром регулирования по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, используют этот полином при формировании передаточной функции внешнего контура регулирования по скорости рабочего органа, а искажение передаточной функции электромеханической системы по управлению устраняют за счет воздействия внеконтурного формирователя, математическую модель гармонического возмущения разделяют на интегральную и колебательную составляющие, колебания момента нагрузки дополнительно компенсируют по внутреннему контуру, представляющему собой обратные связи по напряжению, скорости и току, при формировании передаточной функции внутреннего контура используют интегральную составляющую математической модели гармонического возмущения, а колебательную часть математической модели гармонического возмущения учитывают при формировании передаточных функций полиномиального регулятора внешнего контура и внеконтурного формирователя, при этом передаточные функции элементов системы настраивают в два этапа, на первом из которых по желаемому полиному внутреннего контура, исходя из быстродействия в 5-7 раз выше заданного для системы в целом, определяют параметры элементов внутреннего контура, а на втором этапе по заданному быстродействию и желаемому характеристическому полиному синтезируемой системы формируют передаточные функции регулятора внешнего контура и внеконтурного формирователя.
Технический результат достигается тем, что в устройство компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе, содержащее внеконтурный формирователь, подключенный к неинвертирующему входу первого элемента сравнения, выход которого соединен с регулятором, силовой преобразователь, подключенный к электродвигателю постоянного тока, соединенному с входом по скорости измерительного блока, а выход измерительного блока соединен обратной связью по скорости с инвертирующим входом первого элемента сравнения, введены второй элемент сравнения, третий элемент сравнения, безынерционное звено обратной связи по напряжению с коэффициентом передачи К1, безынерционное звено обратной связи по току с коэффициентом передачи К2, безынерционное звено обратной связи по скорости с коэффициентом передачи К3, интегратор с коэффициентом передачи К4, при этом выход регулятора подключен к неинвертирующему входу второго элемента сравнения, выход второго элемента сравнения подключен к входу интегратора, выход интегратора соединен с неинвертирующим входом третьего элемента сравнения, выход третьего элемента сравнения подключен к входу силового преобразователя, к выходу которого подключен вход по напряжению измерительного блока, соединенного входом по току с электродвигателем постоянного тока, первый выход измерительного блока через безынерционное звено обратной связи по напряжению с коэффициентом передачи К1 соединен с первым инвертирующим входом третьего элемента сравнения, второй выход измерительного блока через безынерционное звено обратной связи по току с коэффициентом передачи К2 подключен ко второму инвертирующему входу третьего элемента сравнения, третий выход измерительного блока подключен к инвертирующему входу второго элемента сравнения и через безынерционное звено обратной связи по скорости с коэффициентом передачи К3 подключен к третьему инвертирующему входу третьего элемента сравнения.
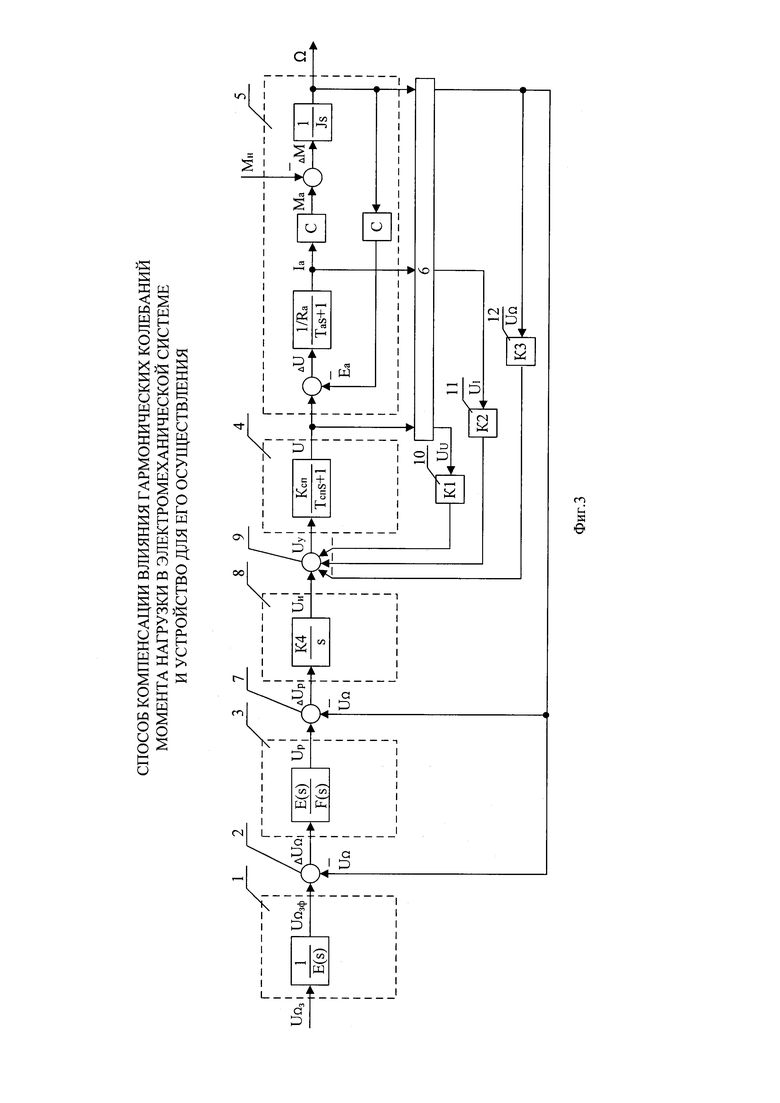
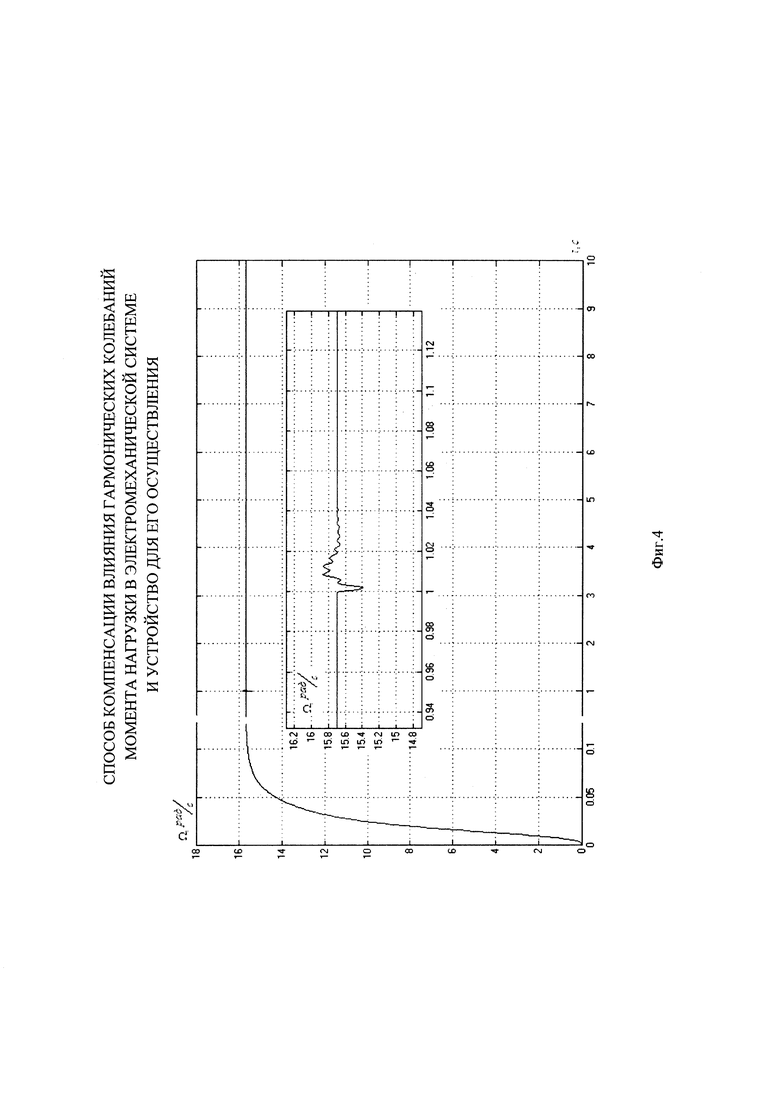
На фиг. 3 изображена блок-схема устройства для осуществления предложенного способа, на фиг. 4 приведены результаты компьютерного моделирования работы устройства, реализующего заявляемый способ при тех же условиях и тех же режимах, которые выбраны для способа-прототипа.
Для фиг. 3 введены следующие обозначения: 1 - внеконтурный формирователь, первый элемента сравнения 2, регулятор 3; силовой преобразователь 4, электродвигатель постоянного тока 5, измерительный блок 6, второй элемент сравнения 7, интегратор 8, третий элемент сравнения 9, безынерционное звено 10 обратной связи по напряжению с коэффициентом передачи К1, безынерционное звено 11 обратной связи по току с коэффициентом передачи К2, безынерционное звено 12 обратной связи по скорости с коэффициентом передачи К3.
Устройство компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе (фиг. 3) содержит внеконтурный формирователь 1, подключенный к неинвертирующему входу первого элемента сравнения 2, выход которого соединен с регулятором 3, силовой преобразователь 4, подключенный к электродвигателю постоянного тока 5, соединенному с входом по скорости измерительного блока 6, выполненного с возможностью измерения напряжения силового преобразователя 4, тока и скорости двигателя постоянного тока 5. Выход измерительного блока 6 соединен обратной связью по скорости с инвертирующим входом первого элемента сравнения 2, второй элемент сравнения 7, третий элемент сравнения 9, безынерционное звено 10 обратной связи по напряжению с коэффициентом передачи К1, безынерционное звено 11 обратной связи по току с коэффициентом передачи К2, безынерционное звено 12 обратной связи по скорости с коэффициентом передачи К3, интегратор 8 с коэффициентом передачи К4, при этом выход регулятора 3 подключен к неинвертирующему входу второго элемента сравнения 7, выход второго элемента сравнения 7 подключен к входу интегратора 8, выход интегратора 8 соединен с неинвертирующим входом третьего элемента сравнения 9, выход третьего элемента сравнения подключен к входу силового преобразователя 4, к выходу которого подключен вход по напряжению измерительного блока 6, соединенного входом по току с электродвигателем постоянного тока 5, первый выход измерительного блока 6 через безынерционное звено 10 обратной связи по напряжению с коэффициентом передачи К1 соединен с первым инвертирующим входом третьего элемента сравнения 9, второй выход измерительного блока 6 через безынерционное звено 11 обратной связи по току с коэффициентом передачи К2 подключен ко второму инвертирующему входу третьего элемента сравнения 9, третий выход измерительного блока 6 подключен к инвертирующему входу второго элемента сравнения 7 и через безынерционное звено 12 обратной связи по скорости с коэффициентом передачи К3 подключен к третьему инвертирующему входу третьего элемента сравнения 9.
Способ осуществляют следующим образом. Первоначально для выбранной электромеханической системы производят снятие и исследование спектрограммы скоростей. Если спектрограмма была построена ранее, пользуются результатами проведенных исследований. На спектрограмме выделяют частоту наиболее существенного воздействия, которое приводит к возникновению доминирующего гармонического возмущения момента нагрузки на валу рабочего органа. По известной кинематической схеме механизма и выявленной частоте находят соответствующую угловую скорость рабочего органа ω1, которая позволяет вычислить математическую модель наиболее существенного возмущения, соответствующую уравнению (2). При этом в отличие от способа-прототипа полином (3), формирующий постоянную и колебательную составляющие математической модели возмущения (2), делится на интегральную и колебательную составляющие: s и (s2+ω12) соответственно.
Для достижения поставленного технического результата и организации процесса управления в состав системы кроме известного внешнего контура регулирования по основной координате (в данном случае - по скорости рабочего органа или жестко связанной с ней скорости электродвигателя постоянного тока), вводят внутренний контур регулирования.
Внутренний контур регулирования построен по принципу регулятора состояния (PC) по основным координатам объекта управления, таким как напряжение, ток, скорость электродвигателя постоянного тока, и организован с применением астатического PC с интегральной составляющей математической модели возмущения. Внутренний контур настраивается на быстродействие, в 5-7 раз превышающее заданные динамические требования, предъявляемые к всей системе в целом. Процедура настройки заключается в определении коэффициентов K1, К2, К3, и К4 обратных связей по выбранным координатам.
Внешний конур строится по принципу полиномиального регулятора (ПР). При определении его параметров используется основное полиномиальное уравнение синтеза

где P(s) и Q(s) - ХП и полином воздействия ПФ внутреннего контура, F(s) и E(s), как и в случае способа-прототипа, - полиномы знаменателя и числителя ПФ регулятора, D(s) - желаемый ХП синтезируемой системы.
В нашем случае характеристический полином (знаменатель передаточной функции регулятора) F(s) задается колебательной составляющей математической модели возмущения

Выбранное высокое быстродействие внутреннего контура с интегральным PC дает основание считать его безынерционным при синтезе внешнего ПР, т.е. принимать: P(s)=1, Q(s)=1, что значительно упрощает регулятор внешнего контура. Следовательно, после выбора желаемого ХП синтезируемой системы по выражению (6) можно определить числитель передаточной функции регулятора, сформировав основные элементы системы управления.
Внеконтурный формирователь 1, исключающий искажение передаточной функции системы по управлению, выбирается аналогично прототипу.
Проведем формирование элементов регулятора в направлении от внутреннего контура к внешнему, воспользовавшись теми же числовыми параметрами объекта управления и заданными требованиями к быстродействию системы, что и в прототипе.
Методом модального управления синтезируется астатический PC внутреннего контура, наделяемый быстродействием, в 7 раз превышающим заданное значение быстродействия системы. При заданном быстродействии системы в 50 мс это соответствует быстродействию внутреннего контура в 7 мс. В качестве желаемого для внутреннего контура принимается ХП Ньютона 4-го порядка P(s)=(s+940)4. с величиной среднегеометрического корня (СГК) Ω0Б=940 c-1, что соответствует выбранному быстродействию внутреннего контура. Полином P(s) наиболее соответствует монотонному переходному процессу, что отвечает требованиям к качеству переходных процессов в системе и удобно для дальнейшей аппроксимации внутреннего контура звеньями пониженного порядка. Расчет матрицы коэффициентов ОС внутреннего контура дает следующий результат: К=[-0.12 -0.82 -77.8 -18339]. Здесь К1=-0,12 - коэффициент передачи обратной связи по напряжению, К2=-0,82 - коэффициент передачи обратной связи по току, К3=-77,8 - коэффициент передачи обратной связи по скорости, К4=-18339 - коэффициент передачи интегратора. Эти значения позволяют выбрать параметры аналоговых или цифровых блоков системы при ее технической реализации.
При расчете внешнего ПР с колебательной составляющей модели возмущения используется основное полиномиальное уравнение синтеза (6).
Высокое быстродействие внутреннего контура с интегральным PC дает основание считать его безынерционным при синтезе внешнего ПР, т.е. принимать: P(s)=1, Q(s)=1. Выбор полинома D(s) для внешнего контура производится из тех же соображений, что и полином P(s) для внутреннего контура системы. В соответствии с заданными требованиями динамики в качестве D(s) выбирается полином Ньютона 2-го порядка (s+80)2 с величиной СГК Ω0=80 с-1, что соответствует заданному быстродействию системы в 50 мс.
В этом случае уравнение синтеза (6) принимает следующий развернутый вид
1⋅(s2+1,572)+1⋅(e1s+e0)=(s+80)2.
Его решение для внешнего контура позволяет получить ПФ регулятора минимального порядка следующего вида
Внеконтурный формирователь 1 по аналогии со способом-прототипом устраняет появление дополнительных нулей ПФ системы по управляющему воздействию. Передаточная функция самого внеконтурного формирователя 1 выбирается с учетом передаточной функции регулятора и принимает вид
Таким образом, порядок передаточной функции системы, организованной путем использования заявляемого способа с учетом порядка передаточной функции внеконтурного формирователя, - четвертый.
Применение последовательности операций, характерных для заявляемого способа, привело к существенному упрощению технического исполнения регулятора, что при его технической реализации аналоговыми или цифровыми устройствами сокращает аппаратные или программные затраты. Это неизбежно приводит к повышению надежности, а при внедрении сокращает время наладки.
Проанализируем результаты компьютерного моделирования синтезированного регулятора при тех же параметрах объекта, что и для способа-прототипа.
Анализ фиг. 4 доказывает высокую эффективность работы системы при пуске, сопоставимую с результатами компьютерного моделирования способа-прототипа, приведенными на фиг. 2. При приложении внешнего возмущающего момента нагрузки после 1 секунды работы на установившейся скорости в 15,7 рад/с наблюдается существенное по сравнению с прототипом снижение динамической ошибки до 0,3 рад/с, что подтверждает улучшение динамической точности заявленной системы.
Компенсация влияния возникающих колебаний момента нагрузки по рассматриваемому варианту способа осуществляется за счет того, что при возникновении таких колебаний происходит изменение угловой скорости вала электродвигателя постоянного тока 5, которое будучи введено в виде отрицательной обратной связи на вход регулятора 3, настроенного на гашение заданной частоты, компенсируется внешним и внутренним контурами системы автоматического управления. Внутренний контур системы, настроенный на высокое быстродействие в 5-7 раз выше заданного, включающий обратные связи по напряжению, току и скорости, а также интегратор, обеспечивает эффективную отработку постоянной составляющей возмущения, низкий порядок регулятора и способствует улучшению динамической точности.
Устройство компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе (фиг. 3) работает следующим образом. Устройство можно условно разделить на внеконтурный формирователь 1, внешний и внутренний контуры. Первоначально для выбранной электромеханической системы производят анализ и определение частоты наиболее существенного возмущения со стороны момента нагрузки на валу рабочего органа Мн. Эту процедуру производят по алгоритму, представленному в разделе, посвященном заявляемому способу, начиная от снятия и исследования спектрограммы скоростей до определения угловой скорости рабочего органа ω1, которая позволяет вычислить математическую модель наиболее существенного возмущения, соответствующую уравнению (2). В отличие от устройства-прототипа полученная модель возмущения делится на интегральную и колебательную составляющие. Колебательная составляющая вводится сомножителем в знаменатель передаточной функции регулятора 3, являющегося основным элементом внешнего контура регулирования. Синтез параметров внешнего контура представлен при описании работы способа.
Один из элементов устройства - внеконтурный формирователь 1 не входит ни в один из контуров и исключает искажение передаточной функции системы по управлению. Он представляет собой звено с передаточной функцией 1/E(s) и предназначен для коррекции влияния управляющего воздействия  на объект управления. Внеконтурный формирователь 1 компенсирует появление дополнительных нулей передаточной функции системы по управляющему воздействию и выбирается аналогично прототипу.
на объект управления. Внеконтурный формирователь 1 компенсирует появление дополнительных нулей передаточной функции системы по управляющему воздействию и выбирается аналогично прототипу.
Элементы внешнего контура регулирования представлены в устройстве следующим образом:
- первый элемент сравнения 2 вырабатывает на своем выходе сигнал ошибки ΔUΩ, представляющий собой разность сигналов UΩзф с выхода внеконтурного формирователя 1 и сигнала UΩ с выхода системы;
- регулятор 3 выполнен в виде звена с передаточной функцией E(s)/F(s). Регулятор 3 и внеконтурный формирователь 1 реализованы в виде цифровых или аналоговых блоков, которые при наладке требуют установки внутренних параметров, соответствующих полиномам, синтезированным в процессе конструирования системы управления.
Для организации процесса управления в состав системы, кроме известного внешнего контура регулирования по основной координате (в данном случае - по скорости рабочего органа или жестко связанной с ней скорости электродвигателя постоянного тока 5), вводят внутренний контур регулирования. Синтез параметров элементов внутреннего контура производят по методике, приведенной ранее для способа, причем при синтезе учитывают интегральную составляющую модели возмущения и задают быстродействие внутреннего контура в 5-7 раз выше требуемого быстродействия системы. Элементы внутреннего контура выполняют следующие функции:
- второй элемент сравнения 7 вырабатывает на своем выходе напряжение, представляющее собой разность напряжений Up с выхода регулятора 3 и UΩ, поступающее с третьего выхода измерительного блока 6 и сформированное измерительным блоком 6, исходя из текущего значения скорости Ω электродвигателя постоянного тока 5;
- интегратор 8, формирующий на своем выходе напряжение Uи, коэффициент передачи К4 интегратора 8, рассчитан при синтезе параметров элементов внутреннего контура;
- третий элемент сравнения 9 вырабатывает на своем выходе напряжение UУ, равное разности напряжений

Напряжения UU, UI, Uω поступают с первого, второго и третьего выходов измерительного блока 6 и являются источниками информации о напряжении силового преобразователя 4, тока электродвигателя постоянного тока 5 и его скорости. Эти величины необходимы для организации работы внутреннего контура регулирования;
- силовой преобразователь 4 формирует на своем выходе напряжение U, поступающее на якорную обмотку электродвигателя постоянного тока 5, являющегося в данной системе элементом объекта управления;
- измерительный блок 6 с безынерционным звеном 10 обратной связи по напряжению с коэффициентом передачи К1, безынерционным звеном 11 обратной связи по току с коэффициентом передачи К2 и безынерционным звеном 12 обратной связи по скорости с коэффициентом передачи К3 предназначены для подключения соответствующих сигналов, информирующих систему об основных параметрах, характеризующих работу (напряжение силового преобразователя 4, ток и скорость электродвигателя постоянного тока 5), с первым, вторым и третьим инвертирующими входами третьего элемента сравнения 9 соответственно.
Допустим, угловая скорость рабочего органа ω1 электромеханической системы равна той, которая вызывает наиболее значимые гармонические колебания момента нагрузки на валу. Этот режим может быть достигнут путем подачи на вход устройства управляющего сигнала , соответствующего ω1. В начальный момент пуска электродвигатель постоянного тока 5 и жестко связанный с ним рабочий орган начинают изменять свои скорости с нуля. В процессе пуска обратные связи по току, напряжению и скорости обеспечивают требуемое быстродействие, исключая перерегулирование при выходе на заданную скорость. После достижения установившегося процесса на вал электродвигателя постоянного тока 5 начинает воздействовать постоянная и гармоническая составляющая момента нагрузки, частота которой жестко связана со скоростью вала электродвигателя постоянного тока 5. Синтезированная двухконтурная система регулирования настроена на данный вид возмущения, стабилизация угловой скорости вала электродвигателя постоянного тока 5 происходит раздельно по контурам. За счет интегратора 8, третьего элемента сравнения 9, через безынерционное звено 10 обратной связи по напряжению с коэффициентом передачи К1 соединенного с первым выходом измерительного блока 6, через безынерционное звено 11 обратной связи по току с коэффициентом передачи К2 соединенного со вторым выходом измерительного блока 6, а также через безынерционное звено 12 обратной связи по скорости с коэффициентом передачи К3 организована работа внутреннего контура. Внутренний контур отрабатывает постоянную составляющую приложенного момента нагрузки и делает это с высоким быстродействием. Настроенный на колебательную составляющую возмущения внешний контур эффективно гасит возникающие гармонические колебания момента нагрузки, что происходит за счет действия отрицательной обратной связи по скорости через третий выход измерительного блока 6, который отвечает за оценку текущего значения скорости электродвигателя постоянного тока 5.
Предлагаемое техническое решение позволяет улучшить динамическую точность и сократить аппаратные или программные затраты при технической реализации системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2008 |
|
RU2370878C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2393620C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2010 |
|
RU2417511C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
Изобретение относится к области электротехники и может быть использовано при регулировании параметров сложных электромеханических систем, например электроприводов постоянного и переменного тока. Технический результат: улучшение динамической точности и сокращение аппаратных или программных затрат при технической реализации системы. Способ компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе заключается в исследовании спектрограммы скоростей электромеханической системы, выделении частоты наиболее существенного возмущения, вычислении полинома, формирующего математическую модель возмущения, введении этого полинома сомножителем в знаменатель передаточной функции регулятора, синтезе коэффициентов регулятора и обратных связей внутреннего контура. При этом математическая модель возмущения делится на интегральную и колебательную составляющие. Устройство, реализующее способ, содержит последовательно соединенные внеконтурный формирователь, первый элемент сравнения, регулятор, второй элемент сравнения, интегратор, третий элемент сравнения, силовой преобразователь, подключенный к электродвигателю постоянного тока, измерительный блок, выполненный с возможностью измерения напряжения силового преобразователя, тока и скорости двигателя постоянного тока. Выходы измерительного блока соединены обратной связью по напряжению, току и скорости через соответствующие безынерционные звенья обратной связи по напряжению с коэффициентом передачи К1, по току с коэффициентом передачи К2, по скорости с коэффициентом передачи К3, с соответствующими инвертирующими входами третьего элемента сравнения, при этом выход блока измерения по скорости дополнительно подключен и инвертирующим входам первого и второго элементов сравнения.. 2 н.п. ф-лы, 4 ил.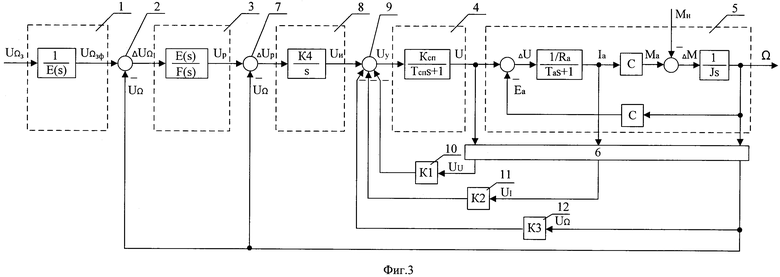
1. Способ компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе, заключающийся в том, что управление осуществляют внешним контуром регулирования по скорости рабочего органа, для чего предварительно по результату анализа спектрограммы скоростей электромеханической системы выделяют частоту наиболее существенного возмущения, с учетом этой частоты находят полином, формирующий математическую модель гармонического возмущения момента нагрузки, используют этот полином при формировании передаточной функции внешнего контура регулирования по скорости рабочего органа, а искажение передаточной функции электромеханической системы по управлению устраняют за счет воздействия внеконтурного формирователя, отличающийся тем, что математическую модель гармонического возмущения разделяют на интегральную и колебательную составляющие, колебания момента нагрузки дополнительно компенсируют по внутреннему контуру, представляющему собой обратные связи по напряжению, скорости и току, при формировании передаточной функции внутреннего контура используют интегральную составляющую математической модели гармонического возмущения, а колебательную часть математической модели гармонического возмущения учитывают при формировании передаточных функций полиномиального регулятора внешнего контура и внеконтурного формирователя, при этом передаточные функции элементов системы настраивают в два этапа, на первом из которых по желаемому полиному внутреннего контура, исходя из быстродействия в 5-7 раз выше заданного для системы в целом, определяют параметры элементов внутреннего контура, а на втором этапе по заданному быстродействию и желаемому характеристическому полиному синтезируемой системы формируют передаточные функции регулятора внешнего контура и внеконтурного формирователя.
2. Устройство компенсации влияния гармонических колебаний момента нагрузки в электромеханической системе, содержащее внеконтурный формирователь, подключенный к неинвертирующему входу первого элемента сравнения, выход которого соединен с регулятором, силовой преобразователь, подключенный к электродвигателю постоянного тока, соединенному с входом по скорости измерительного блока, а выход измерительного блока соединен обратной связью по скорости с инвертирующим входом первого элемента сравнения, отличающееся тем, что в него введены второй элемент сравнения, третий элемент сравнения, безынерционное звено обратной связи по напряжению с коэффициентом передачи К1, безынерционное звено обратной связи по току с коэффициентом передачи К2, безынерционное звено обратной связи по скорости с коэффициентом передачи К3, интегратор с коэффициентом передачи К4, при этом выход регулятора подключен к неинвертирующему входу второго элемента сравнения, выход второго элемента сравнения подключен к входу интегратора, выход интегратора соединен с неинвертирующим входом третьего элемента сравнения, выход третьего элемента сравнения подключен к входу силового преобразователя, к выходу которого подключен вход по напряжению измерительного блока, соединенного входом по току с электродвигателем постоянного тока, первый выход измерительного блока через безынерционное звено обратной связи по напряжению с коэффициентом передачи К1 соединен с первым инвертирующим входом третьего элемента сравнения, второй выход измерительного блока через безынерционное звено обратной связи по току с коэффициентом передачи К2 подключен ко второму инвертирующему входу третьего элемента сравнения, третий выход измерительного блока подключен к инвертирующему входу второго элемента сравнения и через безынерционное звено обратной связи по скорости с коэффициентом передачи К3 подключен к третьему инвертирующему входу третьего элемента сравнения.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| ТАБЛЕТКИ ПАРОКСЕТИНА И СПОСОБ ИХ ПРИГОТОВЛЕНИЯ | 1994 |
|
RU2146141C1 |
| Способ увеличения чувствительности магнитометров | 1948 |
|
SU78567A1 |
| US 7184847 B2, 27.02.2007 | |||
| US 5663713 A1, 02.09.1997 | |||
| EP 0701207 A1, 27.09.2009 | |||
| WO 2004077178 A3, 28.10.2004. | |||

