Группа изобретений относится к системам для измерения переменных магнитных величин приборов, основанных на эффекте Холла, а именно к специализированным приборам и способам диагностики датчиков Холла и может найти применение для комплексного моделирования условий работы установок с вращающимся валом и контроля работоспособности датчиков, измеряющих скорость его вращения.
Из уровня техники известно устройство для контроля магнитных полей переменного и постоянного токов (RU 2572294 C1, МПК G01R 33/07, опубл. 10.01.2016), содержащее датчик Холла, сигнал с которого через усилитель поступает на вход звена частотной коррекции, соединенного с двухпозиционным переключателем. Первый выход положения переключателя соединен с пороговым элементом постоянного поля, а второй выход положения через амплитудный детектор соединен с пороговым элементом переменного поля. Пороговые элементы соединены с сигнальным устройством и жидкокристаллическим алфавитно-цифровым дисплеем.
Способ применения устройства включает в себя регистрацию магнитного поля электроустановки переменного или постоянного тока с помощью датчика Холла, усиление измеренного импульса напряжения пропорционального по величине измеряемому магнитному полю, передачу импульса на звено частотной коррекции, выделяющего частоту 50 Гц из спектра частот, которые считывает датчик, и передачу полученного сигнала напряжения через выходы двухпозиционного переключателя на сигнальное устройство и жидкокристаллический алфавитно-цифровой дисплей.
Недостатком известного технического решения является отсутствие возможности диагностирования с помощью устройства исправности датчика Холла.
Наиболее близким техническим решением к заявленной групп изобретений и выбранным в качестве прототипа является аппаратно-программный комплекс для диагностирования датчика на основе эффекта Холла (RU 2662036 C2, МПК G01R 33/07, опубл. 23.07.2018). Комплекс содержит датчик на основе эффекта Холла, к входу которого подключен токовый формирователь, управляемый микроконтроллером, при этом выход датчика через переключатель подключен к аналоговому блоку, выход которого соединен с аналого-цифровым преобразователем, а выход последнего подключен к измерительному входу микроконтроллера, снабженного запоминающим устройством.
Способ применения комплекса заключается в последовательном возбуждении в датчике Холла двух сигналов с различной амплитудой и последующим измерением упомянутых сигналов с помощью аналого-цифрового преобразователя, на основе измеренных значений сигналов определяется исправность датчика, при этом калибровочные ожидаемые значения измеряемых величин хранятся в памяти, подключенной к микроконтроллеру.
Недостатком известного технического решения является ограниченная возможность его применения для контроля работоспособности датчиков, измеряющих частоту вращения роторов турбин. Кроме того, с помощью комплекса возможна проверка работоспособности только одного датчика, что в целом снижает технологичность прибора.
Технической задачей, на решение которой направлена заявленная группа изобретений, является повышение точности диагностики датчиков Холла, с одновременным повышением технологичности диагностического устройства.
Указанная задача решена тем, что система диагностики датчиков Холла содержит частотный преобразователь, первый выход которого подключен к электродвигателю, а второй - к первому измерительному входу блока диагностирования и анализа сигналов. На вал ротора электродвигателя насажена зубчатая шестерня, выполненная с возможностью бесконтактного взаимодействия с тремя датчиками Холла, закрепленными на корпусе электродвигателя. Датчики Холла через токовые преобразователи, преобразующие входные импульсные сигналы в нормированные выходные сигналы постоянного тока, подключены ко второму, третьему и четвертому измерительным входам блока диагностирования и анализа сигналов, информационный выход которого подключен к автоматизированному рабочему месту оператора системы диагностики датчиков Холла.
Способ применения системы диагностики датчиков Холла включает в себя имитацию вращения ротора турбины газотурбинного энергоблока (ГТЭБ), путем регулирования с помощью частотного преобразователя частоты вращения ротора электродвигателя, регистрацию частоты, подаваемой на электродвигатель, блоком диагностирования и анализа сигналов с помощью первого измерительного входа. При этом одновременно осуществляют регистрацию данных о скорости вращения вала ротора электродвигателя за счет измерения импульсного сигнала, формируемого тремя датчиками Холла, возбуждаемых зубьями зубчатой шестерни, с помощью второго, третьего и четвертого измерительных входов блока диагностирования и анализа сигналов, а затем передают измеренные мгновенные значения частоты, подаваемой на электродвигатель, и измеренной скорости вращения вала ротора электродвигателя на автоматизированное рабочее место оператора системы диагностики, где фиксируют количество сбоев в работе датчиков, путем сравнения подаваемой на электродвигатель частоты и измеренной скорости вращения вала его ротора, при этом анализ данных осуществляют в режиме реального времени с одновременной их архивацией для оценки стабильности работы системы диагностики за длительный период.
Положительным техническим результатом, обеспечиваемым раскрытыми выше признаками системы и способа ее применения, является повышение точности диагностики датчиков Холла за счет возможности имитации работы ротора турбины газотурбинного энергоблока (ГТЭБ) путем применения в приборе электродвигателя и зубчатой шестерни, а также одновременно трех датчиков Холла, подключенных к блоку диагностирования и анализа сигналов. При этом одновременно достигается повышение технологичности способа диагностики за счет применения в составе системы автоматизированного рабочего места оператора, обеспечивающего осуществление контроля состояния датчиков в режиме реального времени, а также формирования информационных массивов данных, позволяющих отслеживать историю измерений и оценивать стабильность работы измерительной системы в целом.
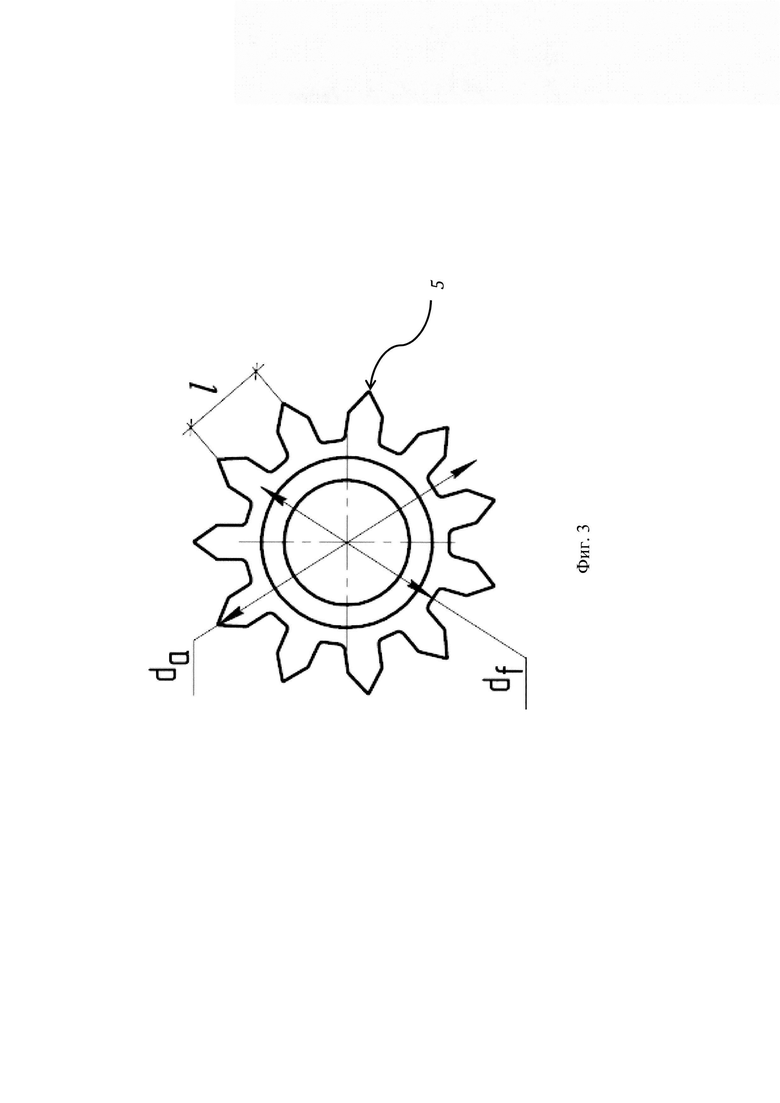
Группа изобретений поясняется чертежами, где на фиг. 1, 2 представлена структурная схема системы диагностики датчиков Холла; на фиг. 3 показан внешний вид зубчатой шестерни (вид спереди); на фиг. 4 приведен внешний вид системы диагностики; на фиг. 5 приведен способ крепления датчиков Холла на корпусе электродвигателя.
Система диагностики датчиков Холла устроена следующим образом.
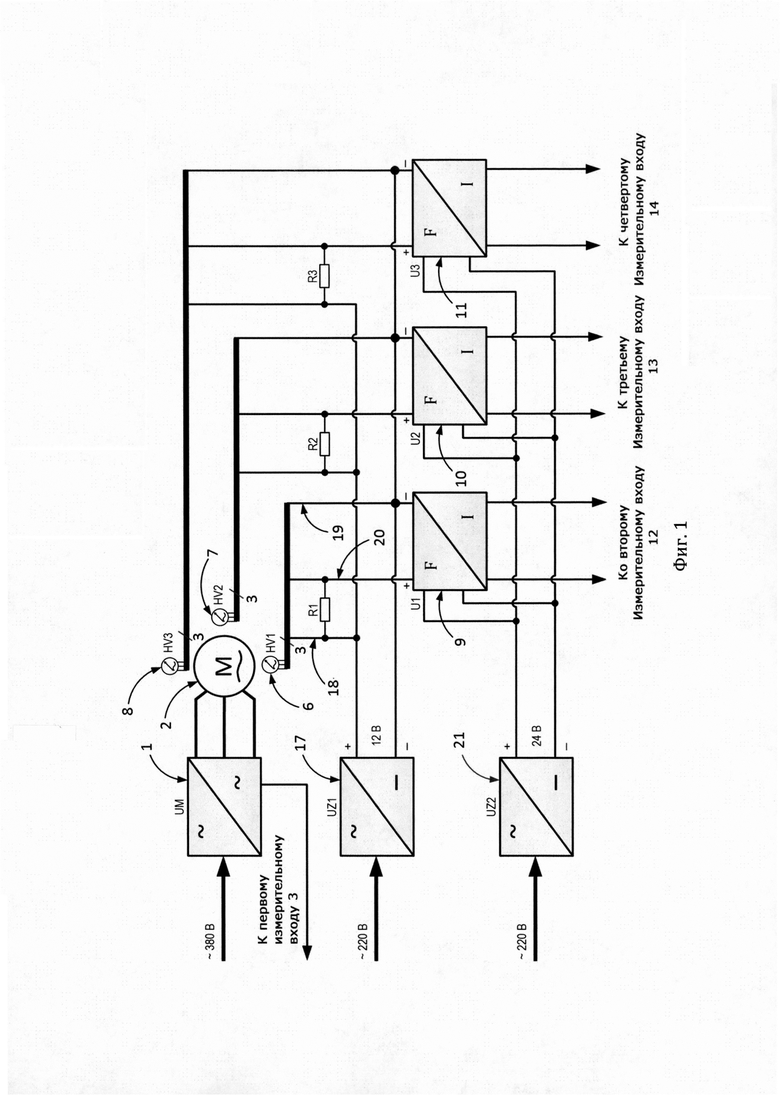
Основой системы является частотный преобразователь 1 (UM), питающийся от сети трехфазного переменного тока, первый выход которого подключен к электродвигателю 2, а второй - к первому измерительному входу 3 блока диагностирования и анализа сигналов 4. На вал ротора электродвигателя 2 насажена зубчатая шестерня 5, выполненная с возможностью бесконтактного взаимодействия с тремя датчиками Холла 6, 7 и 8, закрепленными на корпусе электродвигателя 2. Датчики Холла 6, 7 и 8 через токовые преобразователи 9, 10 и 11, подключены ко второму, третьему и четвертому измерительным входам 12, 13 и 14 блока диагностирования и анализа сигналов 4, информационный выход 15 которого подключен к автоматизированному рабочему месту 16 оператора системы диагностики.
Датчики Холла 6, 7 и 8 (HV1, HV2, HV3) состоят из магнита и элемента Холла, напряжение 12 В постоянного тока подается на них от положительного выхода блока питания 17 (UZ1) через красные токовые провода 18, при этом черные токовые провода 19 соединены с отрицательным выходом блока питания 17 (UZ1) и отрицательными входами токовых преобразователей 9, 10 и 11 (U1, U2, U3), а белые импульсные провода 20 датчиков Холла подключены к положительным входам упомянутых преобразователей. Дополнительно между красными токовыми проводами 18 и импульсными проводами 20 введены токоограничивающие резисторы R1, R2, R3 номинальным сопротивлением R=500 Ом. Питание преобразователей 9, 10 и 11 осуществляется с помощью блока питания 21 (UZ2) постоянным током напряжением 24 В.
Количество зубьев зубчатой шестерни 5, обеспечивающей имитацию вращения вала ротора турбины газотурбинного энергоблока (ГТЭБ), рассчитано следующим образом.
Учитывая, что частота вращения ротора электродвигателя 2 составляет 50 Гц или 3000 об/мин, а токовые преобразователи 9, 10 и 11 имеют шкалу измерения от 0 до 33000 об/мин, передаточное число, рассчитанное как отношение максимального возможного измеренного токовыми преобразователями значения частоты ZБ к максимальной частоте вращения ротора электродвигателя ZМ, составит u=ZБ/ZМ=33000/3000=11, отсюда следует, что для обеспечения имитации вращения вала ротора ГТЭБ зубчатая шестерня 5 должна иметь 11 зубьев. Упомянутая шестерня может быть изготовлена в соответствии с приведенным чертежом, при этом диаметр окружности впадин шестерни составляет df=36 мм, диаметр окружности вершин шестерни составляет da=54 мм, а расстояние между зубьями составляет  (фиг. 3).
(фиг. 3).
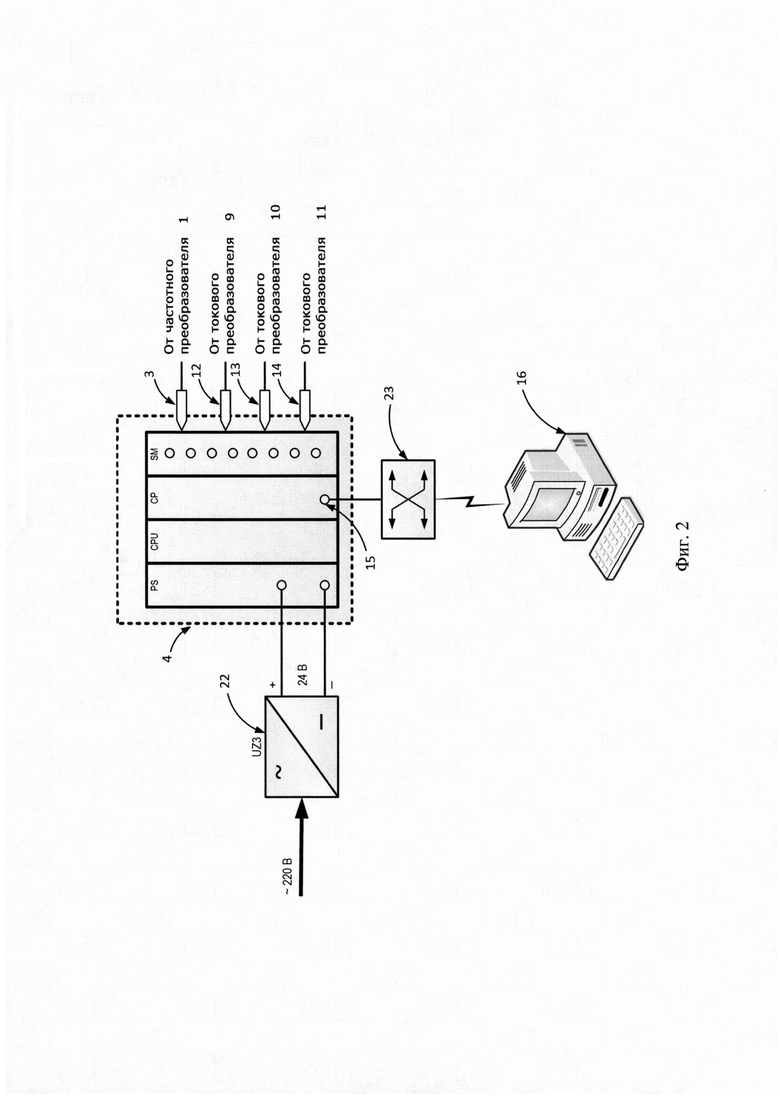
Блок диагностирования и анализа сигналов 4 может быть выполнен на основе центрального процессора и модулей расширения контроллера Siemens Simatic S7-400, при этом в состав блока входит, по крайней мере, один модуль центрального процессора (CPU), например модели Simatic S7-412-1 CPU 6ES7 412-1XJ05-0AB01 (1 Simatic S7-412-1 CPU 6ES7 412-1XJ05-0AB0 // Системы автоматизации и автоматика URL: https://www.saa.su/product/simatic s7-400 6es74121xj050ab0/ (дата обращения: 28.01.2021).), модуль блока питания (PS), например модели Simatic PS 405 6ES7 405-0DA02-0AA02 (2 Simatic PS 405 6ES7 405-0DA02-0AA0 // Системы автоматизации и автоматика URL: https://www.saa.su/product/siemens-simatic-ps-405-6es7-405-0da02-0aa0/ (дата обращения: 28.01.2021).), входное напряжение которого составляет 24 В, к которому подключен блок питания 22 (UZ3), сигнальный модуль (SM), предназначенный для ввода аналоговых сигналов, например модели SM4313 (3 Модули ввода-вывода аналоговых сигналов SM431 и SM432 Siemens Simatic S7-400 // Системы автоматизации и автоматика URL: https://www.saa.su/category/moduli-vvoda-vyvoda-analogovykh-signalov-sm-431-i-sm-432-siemens-simatic-s7-400/ (дата обращения: 28.01.2021).), а также коммуникационный процессор (CP) для подключения контроллера к сети Ethernet, например модели 6ES7 440-1CS00-0YE04 (4 SIMATIC S7-400 CP 440 Коммуникационный модуль 6ES7 440-1CS00-0YE0 // Системы автоматизации и автоматика URL: https://www.saa.su/product/simatic s7-400 6es74401cs000ye0/ (дата обращения: 28.01.2021).).
Автоматизированное рабочее место (АРМ) 16 оператора системы диагностики представляет собой программно-аппаратный комплекс для обработки и хранения информации, выполненный, например, в виде персонального компьютера, реализующего программно-аппаратные модули сигнализации, индикации и формирования архива событий, при этом связь блока диагностирования и анализа сигналов 4 с автоматизированным рабочим местом 16 осуществляется посредством сети Ethernet по проводному или беспроводному каналу связи через коммутатор 23.
Способ применения системы диагностики датчиков Холла заключается в следующем.
С помощью частотного преобразователя 1 (UM), который может состоять из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора, управляемого ШИМ-сигналом, подаваемым, например, с выхода модуля центрального процессора контроллера, задают частоту вращения ротора электродвигателя 2 в пределах от 0 до 3000 об/мин. Далее блок диагностирования и анализа сигналов 4 в соответствии с управляющей программой с помощью первого измерительного входа 3 осуществляет регистрацию текущего значения частоты, подаваемой преобразователем 1 на электродвигатель, а затем выполняет итерационный опрос датчиков 6, 7 и 8, сравнивая заданное значение частоты с его измеренным значением, передавая полученные данные на автоматизированное рабочее место оператора 16. При отклонениях в показаниях любого из датчиков модуль сигнализации формирует следующие сигналы:
- «Предупреждение: скорость вращения низкая» при показании с датчика Холла ниже заданной уставки на 5%;
- «Предупреждение. Скорость вращения высокая» при показании с датчика Холла выше заданной уставки на 5%;
- «Авария. Скорость вращения низкая» при показании с датчика Холла ниже заданной уставки на 10%;
- «Авария. Скорость вращения высокая» при показании с датчика Холла выше заданной уставки на 10%.
Модуль индикации осуществляет вывод сигналов оператору автоматизированного рабочего места оператора системы диагностики, а модуль формирования архива событий автоматически архивирует данные и сохраняет их на жестком диске АРМ для обеспечения возможности вычислять тренды состояния датчиков за любой период времени диагностики. В качестве тренда состояния датчиков могут выступать, например, выборочные характеристики ошибки измерения частоты: выборочное среднее ошибки, дисперсия и среднеквадратическое отклонение, по которым можно судить о качестве работы датчиков в динамике.
Для создания человеко-машинного интерфейса (HMI - Human-machine interface) модуля индикации автоматизированного рабочего места оператора системы диагностики целесообразно использовать систему Simatic WinCC (Windows Control Center), являющуюся составной частью семейства систем автоматизации Simatic, производимых компанией Siemens AG.
Таким образом, рассмотренные в настоящей заявке система и способ ее применения, являются эффективным техническим решением, обеспечивающим возможность точной и тщательной диагностики одновременно трех датчиков Холла в широком диапазоне скоростей вращения вала ротора электродвигателя и полностью автоматическом режиме, с фиксацией времени и количества сбоев в работе неисправных датчиков при снижении трудоемкости диагностики.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАСОС БУРОВОЙ ТРЕХПОРШНЕВОЙ ОДНОСТОРОННЕГО ДЕЙСТВИЯ | 2021 |
|
RU2770342C1 |
| Способ диагностирования технического состояния электрических двигателей по анализу сигналов тока | 2024 |
|
RU2829015C1 |
| Способ диагностирования технического состояния электрических двигателей в режиме реального времени | 2024 |
|
RU2826152C1 |
| СПОСОБ КОНТРОЛЯ ЗА РАЗРАБОТКОЙ МНОГОПЛАСТОВОЙ ГАЗОВОЙ ЗАЛЕЖИ | 2023 |
|
RU2818962C1 |
| КОМПЛЕКС ВЫЧИСЛИТЕЛЬНЫЙ УПРАВЛЯЮЩИЙ С МЕЖМОДУЛЬНОЙ ШИНОЙ FBUS | 2024 |
|
RU2840079C1 |
| СИСТЕМА ДИАГНОСТИКИ КОЛЕСНО-МОТОРНЫХ БЛОКОВ МОТОР-ВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2378633C1 |
| Способ и устройство мониторинга температуры и вибрации электромашинного оборудования | 2023 |
|
RU2804260C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| Способ и устройство для удаленного мониторинга и технической диагностики железнодорожных устройств автоматики и телемеханики | 2018 |
|
RU2700302C1 |
| Устройство диагностики гидрогенераторов с приводным двигателем | 1990 |
|
SU1749984A1 |

Изобретение относится к системам для измерения переменных магнитных величин, в частности к системам и способам диагностики датчиков Холла. Техническим результатом является повышение точности диагностики датчиков Холла, с одновременным повышением технологичности диагностического устройства. Технический результат достигается тем, что система диагностики датчиков Холла, содержащая частотный преобразователь, первый выход которого подключен к электродвигателю, а второй - к первому измерительному входу блока диагностирования и анализа сигналов, отличается тем, что на валу ротора электродвигателя насажена зубчатая шестерня, выполненная с возможностью бесконтактного взаимодействия с тремя датчиками Холла, закрепленными на корпусе электродвигателя, при этом датчики Холла через токовые преобразователи, преобразующие входные импульсные сигналы в нормированные выходные сигналы постоянного тока, подключены ко второму, третьему и четвертому измерительным входам блока диагностирования и анализа сигналов, информационный выход которого подключен к автоматизированному рабочему месту оператора системы диагностики датчиков Холла. 2 н. и 3 з.п. ф-лы, 5 ил.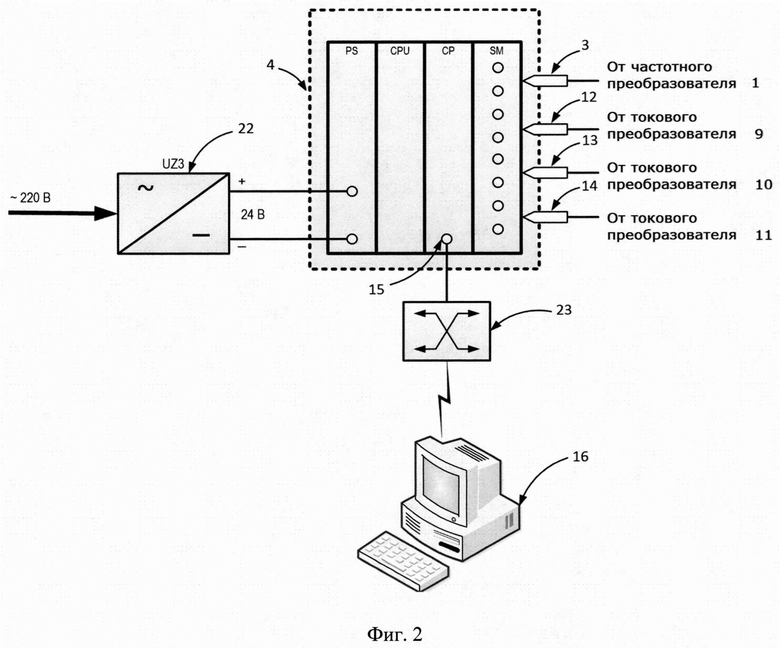
1. Система диагностики датчиков Холла, содержащая частотный преобразователь, первый выход которого подключен к электродвигателю, а второй - к первому измерительному входу блока диагностирования и анализа сигналов, отличающаяся тем, что на валу ротора электродвигателя насажена зубчатая шестерня, выполненная с возможностью бесконтактного взаимодействия с тремя датчиками Холла, закрепленными на корпусе электродвигателя; датчики Холла через токовые преобразователи, преобразующие входные импульсные сигналы в нормированные выходные сигналы постоянного тока, подключены ко второму, третьему и четвертому измерительным входам блока диагностирования и анализа сигналов, информационный выход которого подключен к автоматизированному рабочему месту оператора системы диагностики датчиков Холла.
2. Система по п. 1, отличающаяся тем, что зубчатая шестерня содержит 11 зубьев.
3. Система по п. 1, отличающаяся тем, что блок диагностирования и анализа сигналов выполнен на основе центрального процессора и модулей расширения контроллера Siemens Simatic S7-400.
4. Система по п. 1, отличающаяся тем, что автоматизированное рабочее место оператора системы диагностики представляет собой программно-аппаратный комплекс для обработки и хранения информации, выполненный, в виде персонального компьютера, реализующего программно-аппаратные модули сигнализации, индикации и формирования архива событий.
5. Способ применения системы диагностики датчиков Холла по п. 1, включающий имитацию вращения ротора турбины газотурбинного энергоблока, путем регулирования с помощью частотного преобразователя частоты вращения ротора электродвигателя, регистрацию частоты, подаваемой на электродвигатель, блоком диагностирования и анализа сигналов с помощью первого измерительного входа, отличающийся тем, что одновременно осуществляют регистрацию данных о скорости вращения вала ротора электродвигателя за счет измерения импульсного сигнала, формируемого тремя датчиками Холла, возбуждаемых зубьями зубчатой шестерни, с помощью второго, третьего и четвертого измерительных входов блока диагностирования и анализа сигналов, а затем передают измеренные мгновенные значения частоты, подаваемой на электродвигатель, и измеренной скорости вращения вала ротора электродвигателя на автоматизированное рабочее место оператора системы диагностики, где фиксируют количество сбоев в работе датчиков, путем сравнения подаваемой на электродвигатель частоты и измеренной скорости вращения вала его ротора, при этом анализ данных осуществляют в режиме реального времени с одновременной их архивацией для оценки стабильности работы системы диагностики за длительный период.
| КОМПЛЕКТ ДАТЧИКА НА ОСНОВЕ ЭФФЕКТА ХОЛЛА С ДИАГНОСТИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2014 |
|
RU2662036C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАПРЯЖЕННОСТИ МАГНИТНЫХ ПОЛЕЙ ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКОВ | 2014 |
|
RU2572294C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2061299C1 |
| DE 102011102483 A1, 29.11.2012. | |||

