Заявленное техническое решение относится к области удовлетворения жизненных потребностей человека. Может быть использовано в медицине для реабилитации (восстановления) двигательной активности и амплитуды движений суставов кистей и пальцев рук, нарушенных вследствие перенесенных человеком травм или заболеваний, например - инсульта, и в области спорта, например - для целенаправленного развития тонуса и силы мышц кистей и пальцев рук, например альпинистов, скалолазов.
Известно, что последствием перенесенных травм и/или заболеваний очень часто является нарушение двигательной активности и амплитуды движений в лучезапястных суставах и суставах пальцев кистей рук. Нарушения носят характер ограниченной подвижности в лучезапястных суставах и/или суставах пальцев рук, ограничения амплитуды их движений по сравнению с их физиологическими показателями, ослабление силы мышц, приводящих в движение кисти и пальцы рук. Эти нарушения существенно ограничивают трудоспособность и ухудшают качество жизни пациента перенесшего травму или/и заболевание. Вследствие нарушения функции верхних конечностей, больные испытывают трудности в самообслуживании и осуществлении повседневной активности. В этой связи особую актуальность приобретает подбор наиболее результативных средств реабилитации больных с данной патологией.
Использованные в тексте термины и определения:
Тонус - это упруго-вязкие свойства мышцы, известная степень непроизвольного постоянного мышечного напряжения. Существуют три различных понимания признака тонус: 1) сопротивление мышцы растягивающим ее силам (Rieger, Spiegel), 2) способность мышцы длительно удерживать ту или другую степень сокращения (Foix) и 3) за критерий Т. принимается консистенция мышцы [http://bigmeden.ru/article/%D0%A2%D0%BE% D0%BD%D1%83%D1%81].
Энкодер (преобразователь угловых перемещений) - это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения [tehprivod.su/…/naznache nie-i-vidy-enkoderov.html].
Пациент - человек с нарушенной естественной подвижностью суставов кистей и/или пальцев рук и/ или человек, развивающий силу, тонус, выносливость мышц рук под руководством медицинского персонала или тренера, ради чего подвергаемый процессу реабилитации суставов и мышц кистей и пальцев рук.
Сеанс - промежуток времени, в течение которого совершается действие для реабилитации кисти и/или пальцев рук, какая-нибудь работа или часть ее.
Миосигнал (или электромиограмма (ЭМГ)) - это электрический сигнал, характеризующий биоэлектрическую активность мышц, который регистрируется электродами различного типа: внутримышечными (игольчатые электроды), поверхностные электроды одно или биполярные. В заявленном техническом решении используются поверхностные электроды.
Из исследованного уровня техники заявителем выявлены аналоги заявленного технического решения.
Известно изобретение по патенту RU 2494670 «Способ коррекции мелкой моторики с использованием сенсорных перчаток». Сущностью является способ коррекции мелкой моторики кисти, включающий помещение кисти руки больного в устройство, подключение устройства к компьютеру, загрузку и запуск программы компьютерной игры, и выполнение активных движений на сгибание-разгибание, отличающийся тем, что руку пациента размещают и фиксируют в устройстве в виде сенсорной перчатки, располагают и фиксируют относительно устройства чувствительные и токопроводящие элементы, при этом сенсорную перчатку используют в качестве манипулятора таким образом, что пациент выполняет активные движения сгибания-разгибания кисти и пальцев, обеспечивая этим соответствующие заданные движения объекта компьютерной игры на экране монитора и вызывая этим срабатывание чувствительных элементов и их регистрацию в компьютере. Способ коррекции мелкой моторики кисти отличается тем, что лечебный курс состоит из 28-30 коррекционных занятий, режим занятий 1-2 раза в день, 5 дней в неделю, длительность одного занятия определяется тяжестью общего состояния больного и составляет в среднем 30-40 мин.
Недостатком известного способа является невозможность его использования в случае полной потери возможности движения пальцами, отсутствие возможности сгибать/разгибать пальцы в заранее заданном угловом диапазоне в пассивном режиме, т.е. отсутствие возможности дозировать нагрузку на пальцы путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления, коррекции хода процесса, например - с помощью биологической обратной связи, ограниченность области применения - только для пальцев руки. Другим недостатком является существенная сложность в применении способа ввиду необходимости использования нарушенных вследствие болезни когнитивных (мыслительных) способностей оздоравливаемого пациента для работы с программным обеспечением (далее по тексту - ПО).
Известна полезная модель по патенту RU 137474 «Тренажер для пальцев рук» Сущностью является тренажер для пальцев рук, содержащий каркас, отличающийся тем, что каркас выполнен из цилиндрического стержня с плоским вырезом в центре его поверхности, ширина выреза равна ширине плоской планки, один конец которой размещен в плоском вырезе, на планке закреплен груз в виде обжимного кольца, выполненного с возможностью продольного перемещения по планке, при этом груз выполнен, например, из свинца и надежно зафиксирован посредством, например, пружинного зажима или фиксирующего винта.
Недостатком известной полезной модели является невозможность ее использования в случае полной потери возможности движения пальцами, отсутствие возможности управляемо сгибать/разгибать пальцы в заранее заданном угловом диапазоне в пассивном режиме, т.е. отсутствие возможности дозировать нагрузку на пальцы путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления с помощью биологической обратной связи. Ограничена и область применения - только для пальцев руки.
Известна полезная модель по патенту RU 164002 «Тренажер рук для инсультбольных». Сущностью известного технического решения является то, что тренажер выполнен в виде тумбы из металлического профиля, обшитого ДСП (древесно-стружечной плитой), включающей две боковые и заднюю поверхности, низ и дверцы, а также верхнюю поверхность, на которую установлен рычаг-трансформер с закрепленными на нем двумя трубами разных диаметров и чашечек для локтя и плеча, обшитых изнутри мягким материалом на поролоновой основе, приводимый установленным внутри тумбы электроприводом, включаемым при помощи кнопки на гибком шланге и работающим на двух скоростях. Тренажер рук для инсультбольного, отличающийся тем, что он может быть изготовлен из пластмассы, композитного материала. Тренажер рук для инсультбольного, отличающийся тем, что внутренние поверхности труб могут быть изготовлены из кожи.
Недостатком известной полезной модели является ограниченность области использования - применимость тренажера только для плечевого и локтевого суставов руки при невозможности применения модели для реабилитации суставов кисти и пальцев рук, отсутствие возможности управления моделью в ходе реанимационного процесса путем задания выявленного диагностикой диапазона углов сгибания, отсутствие возможности мониторинга динамики восстановления и оперативной коррекции хода реанимационного процесса. Таким образом, известная полезная модель мало функциональна и эргономически неудобна, особенно для частого использования, например - для домашнего двукратного использования одним пациентом в течение одних суток.
Известна полезная модель по патенту RU 120002 «Психофизиологический комплекс для реабилитации мелкой моторики кисти». Сущностью является психофизиологический комплекс для реабилитации мелкой моторики кисти, включающий последовательно соединенные вспомогательное средство, чувствительные элементы и персональный компьютер для сбора, обработки и хранения информации, отличающийся тем, что вспомогательное средство выполнено в виде гибкой оболочки в форме перчатки или части перчатки, при этом перчатка размещена и зафиксирована на руке пациента, при этом чувствительные элементы расположены на поверхности перчатки, при этом на компьютере установлена адаптированная для пациента компьютерная игра, а программное обеспечение компьютера выполнено для распознавания сигналов от сенсоров сгиба и/или поворота, которыми оснащена перчатка. Психофизиологический комплекс, отличающийся тем, что вспомогательное средство содержит соответствующий элемент для включения и выключения комплекса. Психофизиологический комплекс, отличающийся тем, что устройство может быть выполнено в проводном или беспроводном варианте. Психофизиологический комплекс, отличающийся тем, что возможно использование как одной, так и двух, соответственно на правую и на левую руку, вспомогательных средств одним пациентом. Психофизиологический комплекс, отличающийся тем, что вспомогательное средство может быть осуществлено с разными вариантами исполнения гибкой оболочки и с разными вариантами размещения чувствительных элементов. Психофизиологический комплекс, отличающийся тем, что комплекс снабжен блоком зрительной связи, расположенным напротив пациента. Психофизиологический комплекс, отличающийся тем, что комплекс снабжен блоком звуковой связи.
Недостатком известной полезной модели является невозможность использования ее в случае полной потери излечиваемым возможности движения пальцами - из-за отсутствия способности (возможности) модели сгибать/разгибать пальцы в заранее заданном угловом диапазоне в пассивном режиме, т.е. отсутствия возможности в процессе реабилитации управляемо дозировать нагрузку на пальцы путем задания угла сгибания пальцев, например - для повышения тонуса и силы мышц. Ограничена и область применения - только для пальцев руки. Имеется существенная сложность в применении модели ввиду необходимости использования (при применении) нарушенных из-за болезни когнитивных (мыслительных) способностей оздоравливаемого пациента для работы с программным обеспечением, что затрудняет применение полезной модели у указанных категорий больных. Кроме того, известная полезная модель сложна в управлении самим больным, что существенно ограничивает возможность применения модели по назначению.
Известна полезная модель по патенту RU 147759 «Тренажер для восстановления подвижности пальцев рук». Сущностью является тренажер для восстановления подвижности пальцев рук, содержащий экзоскелет кисти руки с приводами перемещения пальцев экзоскелета и блоком их управления, отличающийся тем, что привод перемещения каждого из пальцев выполнен индивидуальным, а пальцы снабжены средством привлечения внимания пациента, при этом блок управления приводами пальцев выполнен с возможностью подключения к энцефалографическому шлему и содержит последовательно соединенные блок регистрации энцефалограмм, блок анализа энцефалограмм и блок формирования команд на приводы пальцев.
Недостатком известной полезной модели является отсутствие возможности обеспечить сгибание/разгибание пальцев в заранее заданном (по результатам диагностики) угловом диапазоне в пассивном режиме, т.е. отсутствие возможности управляемо дозировать нагрузку на пальцы путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления, отсутствие возможности коррекции хода процесса реабилитации, например - с помощью биологической обратной связи, ограничена область применения - только для пальцев руки. Другим недостатком известной полезной модели является также значительная сложность в применении из-за необходимости использования имеющего весьма ограниченное применение - только в лечебных учреждениях - электроэнцефалографического шлема, вследствие чего модель практически не применима в домашних условиях и/или самим излечиваемым пациентом, в том числе потому, что для установки и эксплуатации электроэнцефалографического шлема требуется участие второго специалиста, в дополнение к занимающемуся реабилитацией лечащему врачу.
Известно устройство для непрерывного пассивного движения по патенту US 5327882 A. Сущностью является устройство непрерывного пассивного движения для терапии руки пациента, содержащее шину, приспособленную для крепления к предплечью и руке пациента, привод, прикрепленный к упомянутой шине, и содержащий двигатель для привода шестереночной передачи, установленного в корпусе, установленном с возможностью вращения шестереночной передачи вдоль первой оси, средство для прикрепления пальцев, продолжающееся от указанного корпуса и приспособленное для поворота относительно него вокруг второй оси, отстоящей от первой оси и параллельной ей, причем указанное средство для прикрепления пальцев приспособлено для крепления, по меньшей мере, к одному из пальцев пациента, причем указанное средство передачи при приведении в действие упомянутого моторного средства, заставляющее упомянутое средство крепления пальцев вращаться в противоположную сторону вокруг упомянутой второй оси и относительно вращения упомянутого корпуса вокруг упомянутой первой оси, посредством чего указанный, по меньшей мере, один палец приводится в движение по обратному пути движения, соответствующему, по меньшей мере, часть сложной спирали.
Более кратко возможно констатировать, что сущностью является устройство, содержащее шину, приспособленную для крепления к предплечью и руке пациента, привод, установленный на шине и содержащий двигатель, служащий для приведения в движение зубчатых передач, и выполненные с возможностью вращения средства для крепления пальцев пациента.
Недостатками известного устройства являются невысокая эффективность (неудовлетворительная результативность) терапии, выражающаяся в виде неполного восстановления работы пальцев вследствие того, что физиологическое сгибание на данном устройстве производится в неполном (по сравнению с естественным) объеме, поскольку конструкцией тренажера не предусмотрено (не обеспечивается) сгибание межфалангового сустава дистальной и средней фаланги, отсутствует возможность мониторинга динамики восстановления с помощью биологической обратной связи, ограничена область применения - только для пальцев руки. Отсутствие инструментального мониторинга сеанса реабилитации лишает возможности оперативно корректировать параметры, например - углы сгибания пальцев, в ходе процесса. Указанные недостатки существенно ограничивают его применение по назначению.
Известно устройство для реабилитации руки по международной заявке WO 2011117901 A1. Сущностью является устройство для реабилитации рук (10, 10'), используемое в реабилитационной терапии подвижности и функциональности пястно-фаланги, проксимальной межфаланги и дистальных межфаланговых суставов, поврежденных или уменьшенных после травмы или тому подобного, в послеоперационный период или в случае пареза или паралича руки после заболеваний центральной нервной системы, травм спинного мозга, периферических невропатий или тому подобного, и/или когда движения суставов кисти должны быть улучшены по назначению физиотерапевта во время сеансов реабилитации, указанное устройство гибкое, модульное и содержит ортез (17, 90), приспособленный для частичного покрытия руки пациента (19) и предплечья (13), и отличается тем, что содержит гибкие стержни (36, 58, 104) для пассивного и вспомогательного активного, одновременного и/или выборочный, сгибание/разгибание пяти пальцев с помощью упражнений, последовательностей и/или комбинаций движений, свободно устанавливаемых оператором, элементов для скольжения и поддержки гибких движений, стержни при сгибании/разгибании пальцев, «наконечники для пальцев» (46) или ленты (94, 98), снабженные наперстками (50, 96, 100), неподвижными стержнями (44) или пластинами (102), закрепленными на наперстках и на шарнирах к гибким стержням - блок перемещения/команды и управления (12, 11), встроенный в ортез или удаленный, расположенный относительно него, снабженный пятью исполнительными средствами для перемещения гибких стержней, средством для регулировки натяжения упомянутых стержней и средством для настройки и адаптации реабилитационного устройства к анатомическим особенностям кисти.
Таким образом, более коротко, сущностью является устройство, выполненное с частичным покрытием руки и предплечья пациента и содержащее свободно устанавливаемые оператором гибкие стержни для пассивного движения, элементы для скольжения и поддержки гибких стержней во время изгиба/растяжения пальцев, напальчники или ленты, снабженные наконечниками, неподвижными стержнями или пластинами, установленные на напальчниках и шарнирно прикрепленными к гибким стержням, выполненные за одно целое с ортезами или расположенные на расстоянии друг от друга, снабжены пятью приводными средствами для перемещения гибких стержней, средствами регулирования натяжения стержней и средствами регулировки и приспособления реабилитационного устройства к анатомической функции.
К недостаткам известного устройства относятся невысокая эффективность терапии (лечебного процесса), связанная с тем, что физиологическое сгибание на данном тренажере производится в неполном (по сравнению с естественным) объеме, отсутствует возможность мониторинга динамики восстановления и управляемой коррекции лечебного процесса в ходе его (процесса) выполнения, ограничена область применения устройства по назначению - только для пальцев руки, при этом устройство характеризуется сложностью конструктивного исполнения.
Известна полезная модель «Тренажер» по патенту RU 175324. Сущностью является тренажер, содержащий блок крепления на руку в виде основания, выполненного с возможностью крепления на наружной стороне предплечья и кисти руки, выполненную с возможностью перемещения часть и соединенные с ней блок привода и средства для крепления пальцев, при этом блок привода содержит двигатель и консоли, установленные с боковых сторон блока привода и направленные в сторону кисти руки, при этом выполненная с возможностью перемещения часть тренажера выполнена в виде двух пар рычагов, расположенных по обе стороны от продольной оси блока привода и шарнирно соединенных с консолями, причем первые рычаги пары выполнены с возможностью перемещения посредством первой зубчатой передачи относительно оси, соединяющей их с концами консолей, а вторые рычаги пары выполнены с возможностью перемещения посредством второй зубчатой передачи относительно оси, соединяющей их с концами первых рычагов, при этом между свободными концами вторых рычагов жестко установлена ось, на которой смонтированы средства для крепления пальцев, выполненные в виде четырех цепочек шарнирно соединенных звеньев, причем на свободных концах цепочек установлены держатели пальцев, а звенья выполнены с отверстиями с возможностью размещения в них, по меньшей мере, двух тросов, при этом длина троса, размещенного ближе к пальцу, меньше длины троса, размещенного на большем расстоянии от пальца, согласно полезной модели блок привода выполнен с возможностью перемещения над основанием по жестко установленной в его передней части направляющей, а двигатель блока привода соединен с установленным с возможностью вращения валом посредством третьей зубчатой передачи и датчиком угла положения тренажера посредством четвертой зубчатой передачи. При этом, согласно описанию полезной модели, датчик угла положения тренажера может быть выполнен в виде датчика, основанного на эффекте Холла.
Недостатком известной полезной модели является отсутствие возможности обеспечения сгибания/разгибания пальцев в заранее заданном (согласно результатам диагностики) угловом диапазоне в пассивном режиме, то есть, отсутствие возможности дозировать нагрузку на пальцы - тем самым восстановить силу мышц пальцев - путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления и коррекции процесса восстановления с помощью биологической обратной связи, ограниченность области применения - только для суставов пальцев рук (но не кистей рук!).
При этом следует акцентировать внимание на том, что из исследованного заявителем уровня техники, в том числе - медицинской техники индустриально развитых стран, на дату представления настоящих заявочных материалов не выявлены устройства, полезные модели и способы, полноценно, с достаточной для жизненной практики и трудовой деятельности результативностью обеспечивающие возможность реабилитировать (восстанавливать, вернуть) утраченные вследствие болезни и/или травмы двигательные навыки кистей рук и пальцев людей, обеспечивающих возможность дистанционного контроля и коррекции в случае необходимости процесса реабилитации, каковые возможности представлены в заявленном техническом решении. Кроме указанного, существенным потребительским свойством заявленного технического решения является возможность индивидуального применения в домашних условиях под контролем лечащего врача, в том числе и в режиме реального времени. Из исследованного уровня техники заявителем не выявлены присущие заявленному техническому решению и указанные выше потребительские свойства.
По назначению и совокупности совпадающих существенных признаков в качестве ближайшего аналога, прототипа, заявителем выбран аппарат для роботизированной механо-терапии верхних конечностей Flex 05 [https://www.ormed.ru/katalog/passivnaya-reabilitatsiya/ormed-flex-05-dlya-luchezapyastnogo-sustava/]. Сущностью прототипа является аппарат Flex 05, который используют для предотвращения осложнений после травм и переломов, лечения заболеваний суставов в послеоперационном периоде, предотвращения осложнений после длительной иммобилизации, восстановления подвижности суставов после хирургических вмешательств. Аппарат обеспечивает выполнение сгибательных/разгибательных движений кисти руки вверх/вниз, вправо/влево.
Технические характеристики прототипа Flex 05:
- углы разгибания и сгибания конечностей: 50°/0°/90°,
- углы поворота внутрь/наружу 90°/0°/90°,
- скорость вращательных движений: максимальная - 210°/мин, минимальная - 30°/мин,
- вынуждающую силу, приводящую в движение сустав кисти, настраивают индивидуально от 5% до 100%.
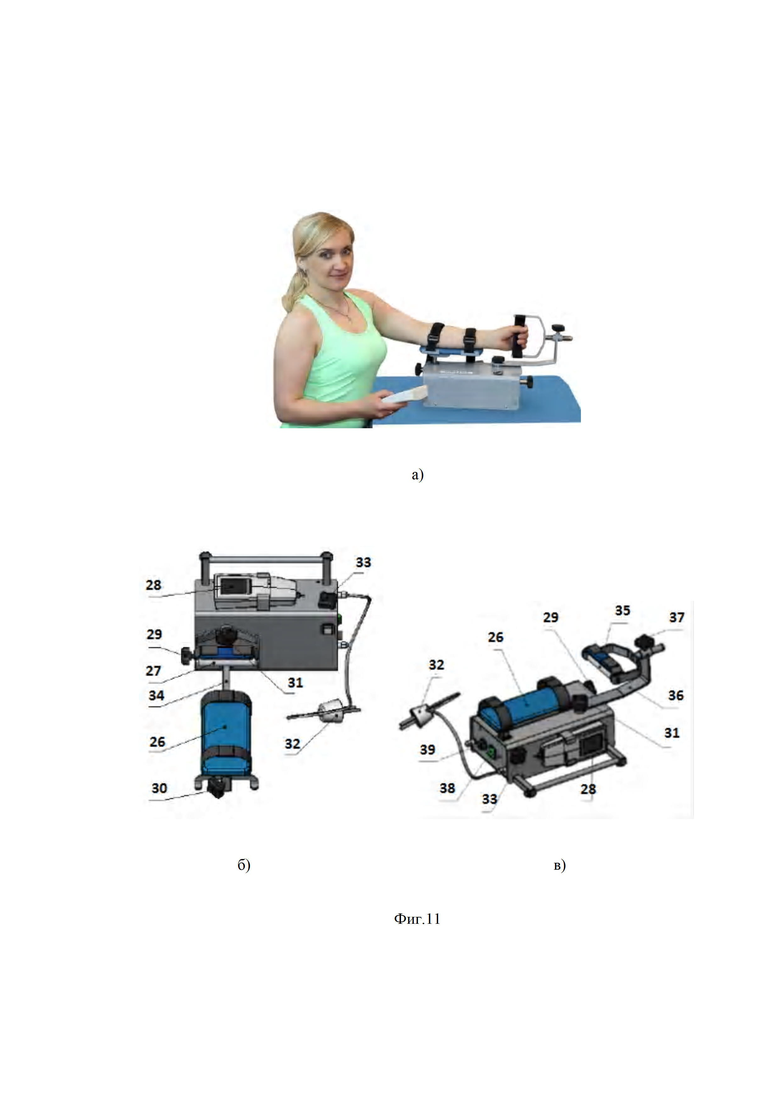
Прототип представлен на Фиг. 11 [https://stimul.gitt.ru/files/Manuals/instrukciya_flex_03.pdf], [https://www.ormed.ru/katalog/passivnaya-reabilitatsiya/ormed-flex-05-dlya-luchezapyastnogo-sustava/]. При этом заявитель поясняет, что, хотя в соответствии с п. 57 Требований к документам заявки на выдачу патента на изобретение, фигуры должны нумероваться в соответствии с их очередностью упоминания в тексте описания, заявитель пронумеровал фигуру с прототипом последней, так как она имеет пояснительный, вспомогательный характер. Соответственно, нумерация позиций прототипа также идет после нумерации основных позиций фигур.
На Фиг. 11а изображен общий вид аппарата Flex 05 в процессе его использования.
На Фиг. 11б и 11бв представлены основные функциональные элементы, детали и узлы аппарата Flex. Пояснение позиций приведено ниже в описании фигур.
Недостатками прототипа являются:
1 - отсутствие мобильности устройства - аппарат Flex 05 питается от электрической сети 220 вольт, весит около 10 кг, что ограничивает свободу перемещения и использования тренажера,
2 - отсутствие возможности его применения для восстановления тонуса, подвижности суставов и силы мышц пальцев кистей рук при полной или частичной потере их (кисти и пальцев) двигательных функций, так как у известного устройства отсутствует возможность фиксации кисти руки и пальцев в позиции, необходимой для реабилитации (восстановления тонуса, подвижности и силы мышц) полностью или частично утративших двигательные функции пальцев,
3 - применимость для осуществления только динамического метода реабилитации, при отсутствии возможности его использования для статических методов реабилитации,
4 - ограниченная область применения - он используется только для реабилитации лучезапястного сустава кисти руки, исключая реабилитацию суставов и мышц пальцев,
5 - отсутствие возможности разрабатывать совместно или раздельно (в отдельности) каждый из зафиксированных пальцев,
6 - при наличии зрительного мониторинга полностью отсутствует возможность инструментального (свободного от влияния человеческого фактора) мониторинга динамики восстановления и коррекции восстановительного процесса,
7 - по своей конструкции прототип применим только при непосредственном (при наличии зрительного и словесного контакта пользователей) контакте лиц - пациента и лечащего врача, в результате чего он (прототип) не пригоден для дистанционного использования, что существенно ограничивает его использование по назначению.
Целью создания заявленного технического решения является устранение указанных выше недостатков прототипа, расширение области применения и функциональных возможностей технических средств для использования их в целях реабилитации и/или тренировки как суставов и мышц кистей рук, так и пальцев кистей, повышение результативности (эффективности) процесса реабилитации и/или тренировок, включающей разработку суставов и мышечных групп пальцев и всей кисти, сокращение времени (продолжительности процесса) реабилитации для восстановления двигательных навыков, тонуса и движений в кисти и пальцах рук у пациентов, повышение качества жизни людей.
Техническим результатом заявленного технического решения является устранение недостатков прототипа, а именно:
1) обеспечение возможности мобильности и автономной работы тренажера - вне зависимости от наличия электророзеток, за счет использования автономных источников электропитания, например - аккумуляторов;
2) обеспечение возможности фиксации кисти руки и пальцев в позиции, необходимой для реабилитации (восстановления тонуса, подвижности и силы мышц) полностью или частично утративших двигательные функции пальцев, за счет использования специально разработанной перчатки;
3) обеспечение возможности использования заявленного тренажера для осуществления нескольких (более одного) методов реабилитации - динамических и статических методов, тогда как прототип обеспечивает реализацию только динамического метода реабилитации, не позволяя применять статические методы реабилитации;
4) расширение области применения - использование для реабилитации не только кистей, но и суставов и мышц пальцев рук;
5) обеспечение возможности разрабатывать совместно или в отдельности каждый из зафиксированных пальцев, используя программное обеспечение компьютера на стороне пациента, контролируя при этом силу давления каждого пальца и управляя величиной вынуждающей (сгибающей/разгибающей пальцы) силы давления на каждый отдельно взятый палец - с использованием сенсоров давления и электрических сигналов мышц с использованием миосенсоров;
6) обеспечение возможности инструментального (свободного от влияния человеческого фактора) мониторинга динамики восстановления и коррекции восстановительного процесса за счет использования сенсоров в цепи биологической обратной связи;
7) обеспечение возможности дистанционного использования устройства, то есть при отсутствии или невозможности непосредственного зрительного контакта между пациентом и лечащим врачом в процессе реабилитации, что позволяет дополнительно оптимизировать процесс реабилитации в сторону сокращения времени восстановления. При этом понятие дистанционного использования подразумевает использование заявленного технического решения на любых расстояниях, ограниченном лишь наличием/отсутствием сети Интернет.
Сущностью заявленного технического решения является тренажер с биологической обратной связью для реабилитации кистей и пальцев рук, состоящий из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, отличающийся тем, что дополнительно оснащен шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом, Bluetooth- модулем связи с входящим в комплект тренажера компьютером, модулем сенсора кожно-гальванической реакции организма пациента, модулем миосенсора, модуля преобразователя напряжения питания для шагового двигателя, автономными, независимыми от электросети источниками электропитания для питания всех электронных компонент и модулей тренажера, подключаемым в Интернет компьютером с установленным на нем специально разработанным программным обеспечением, модулем двигателя для сгибания/разгибания пальцев кисти руки с содержащим обеспечивающий управляемое принудительное сгибание/разгибание пальцев кисти руки сервопривод, перчаткой для фиксации кисти руки на модуле сгибания пальцев кисти руки, оснащенной расположенными внутри пальцев перчатки датчиками давления пальцев кисти руки. Способ работы тренажера по п. 1, заключающийся в том, что на внешней стороне предплечья больной руки пациента фиксируют модуль управления тренажера с использованием плотно охватывающих снизу предплечье ремней на липучке, пальцы пациента вставляют в пальцы перчатки и фиксируют пальцы перчатки на подложке фиксации пальцев перчатки крепежными винтами, ладонь пациента фиксируют на суппорт-фиксаторе кисти руки с помощью ленты на липучке, на здоровой руке пациента на среднем и указательном пальцах фиксируют датчики для измерения кожно-гальванической реакции пациента, датчики для измерения кожно-гальванической реакции закрепляют в выполненном из эластичной ткани напальчнике, на модуль управления тренажера подают напряжение путем нажатия кнопки включения, далее тренажер под управлением программного обеспечения автоматически устанавливают в стартовое положение - то есть подложку фиксации пальцев устанавливают в крайнее переднее положение, обеспечивая полное выпрямление пальцев кисти пациента, модуль сгибания кисти устанавливают в горизонтальное положение, включают электропитание входящего в состав тренажера компьютера, после чего программное обеспечение автоматически устанавливает связь между модулем управления тренажера и компьютером с использованием беспроводного канала Bluetooth, при наличии возможности использования сети Интернет по Wi-Fi устанавливают соединение с компьютером лечащего врача и проверяют наличие обновления конфигурационного файла для модуля управления тренажера, где прописаны режимы работы тренажера, в случае если файл конфигурации тренажера был обновлен лечащим врачом с целью оптимизации процесса реабилитации, файл конфигурации скачивают и устанавливают через компьютер пациента на тренажер автоматически, на компьютере запускают прилагаемое программное обеспечение, выбирают режим использования тренажера - для кисти или пальцев, конкретный режим для кисти или конкретный режим для пальцев и начинают процесс реабилитации и/или тренировки, снимают с помощью миосенсоров и датчиков кожно-гальванической реакции организма биометрические данные пациента, передают их и записывают в компьютере пациента, далее осуществляет передачу биометрических данных через сеть Интернет по Wi-Fi на компьютер лечащего врача, в случае отсутствия возможности использования сети Интернет в момент проведения сеанса реабилитации данные записывают на компьютер пациента и передают на компьютер лечащего врача при появлении возможности подключиться к сети Интернет.
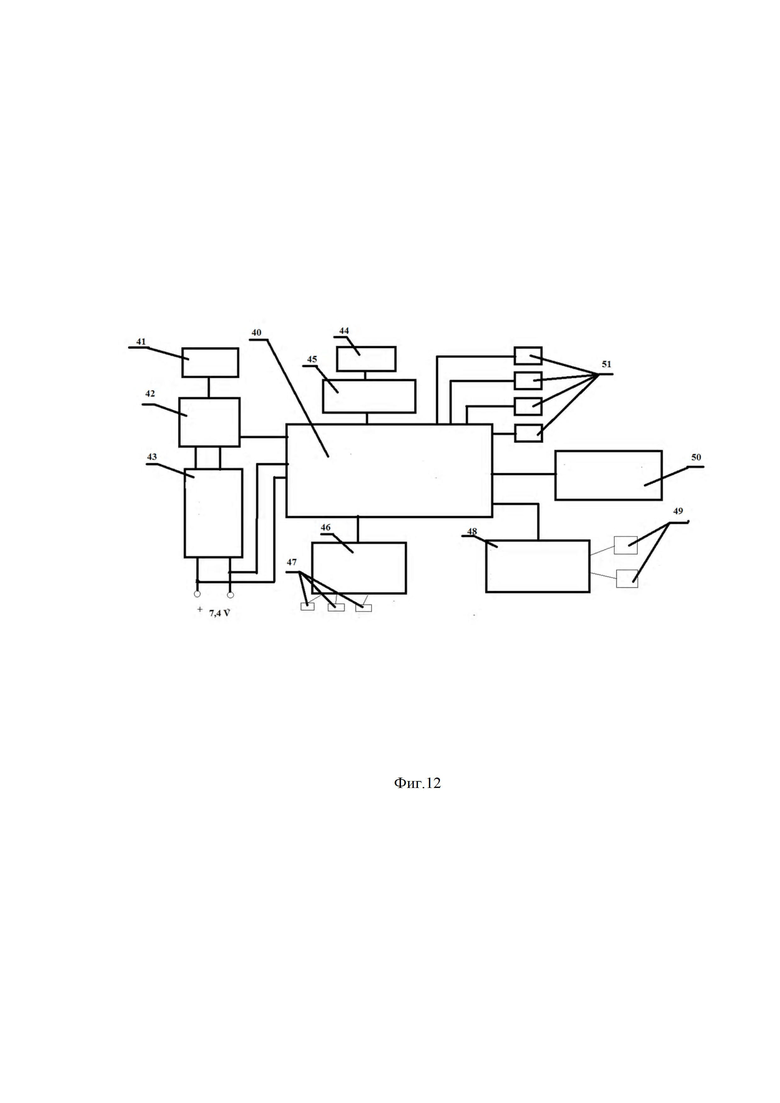
Блок-схема соединений описанных выше электронных компонент (управляющий микроконтроллер, контроллер шагового двигателя, контроллер для управления сервоприводом, Bluetooth-модуль, модуль сенсора кожно-гальванической реакции организма пациента, модуль миосенсора, модуль преобразователя повышающего напряжения питания для шагового двигателя) представлена на Фиг. 12.
Заявленное техническое решение иллюстрируется Фиг. 1 - Фиг. 12.
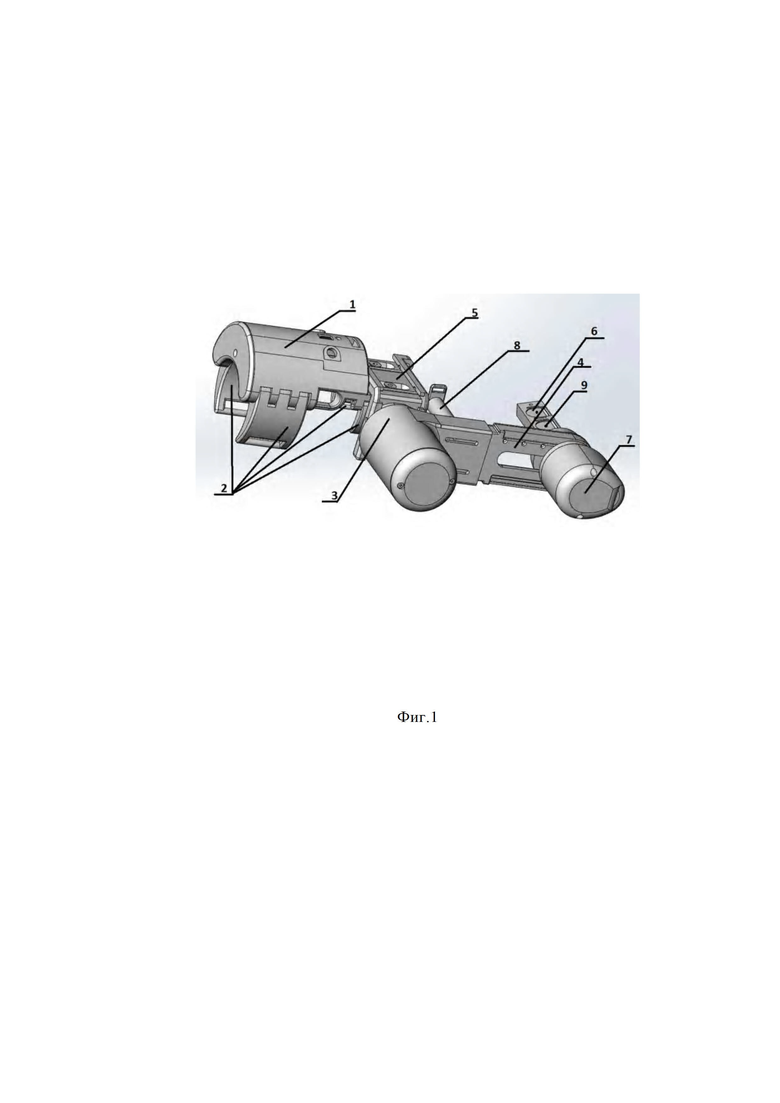
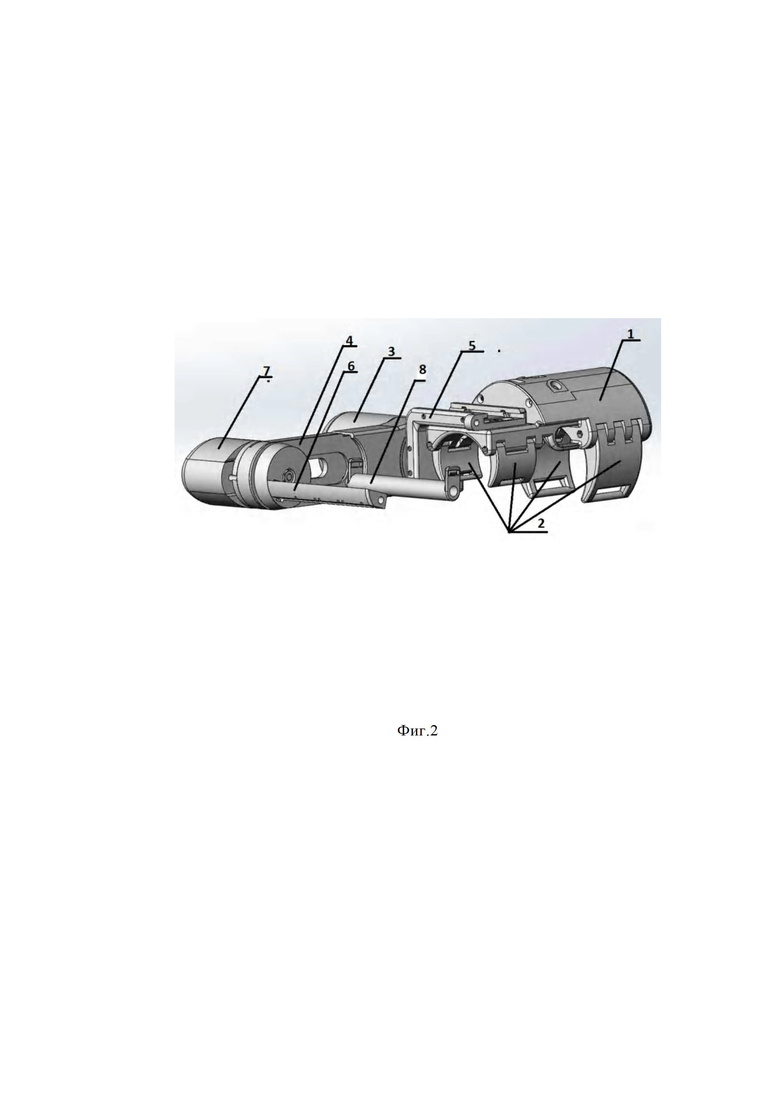
На Фиг. 1 и Фиг. 2 представлен (Фиг. 1 - вид справа, Фиг. 2 - слева) электронно-механический блок тренажера (в сборе) с биологической обратной связью для реабилитации пальцев и кистей рук, где:
1 - модуль управления,
2 - ушки для ремней крепления тренажера на предплечье,
3 - модуль двигателя сгибания кисти руки,
4 - сменный модуль сгибания (вверх/вниз) кисти и/или пальцев руки,
5 - Г-образная пластина крепления модуля двигателя 3 и модуля сгибания кисти и пальцев руки 4,
6 - подложка для фиксации пальцев одеваемой на руку перчатки,
7 - модуль двигателя сгибания пальцев руки,
8 - суппорт-фиксатор кисти руки,
9 - отверстия для крепления пальцев перчатки.
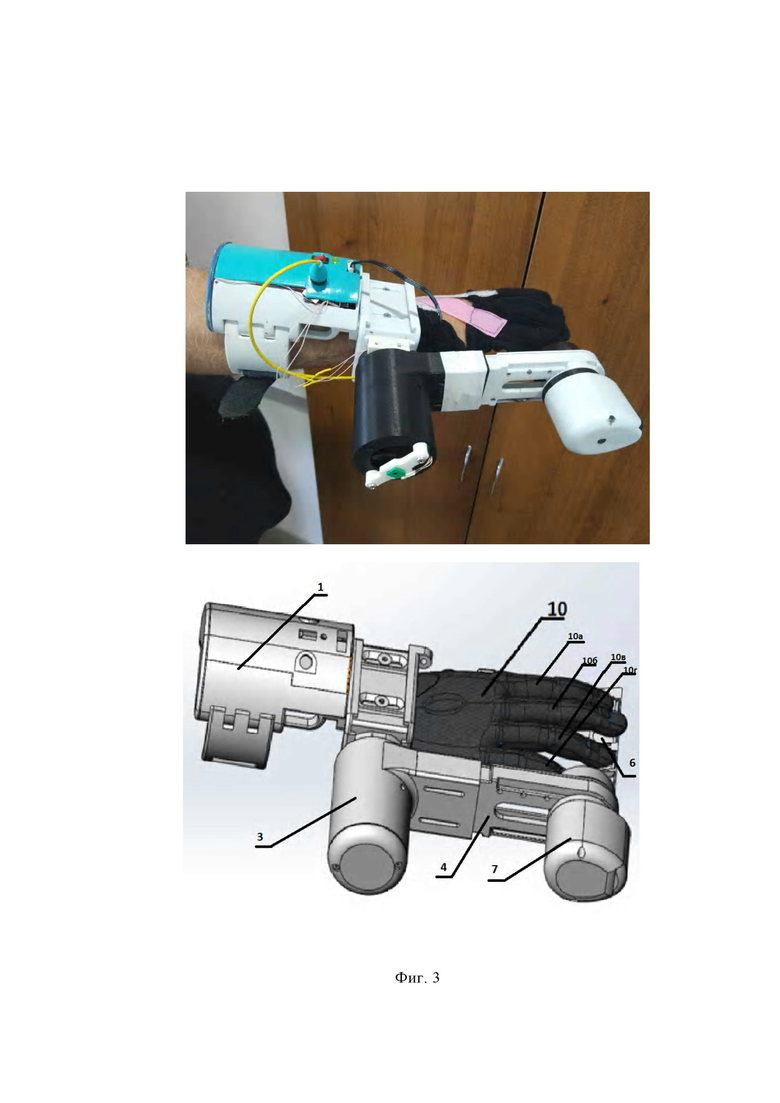
На Фиг. 3 представлены фото и рисунок зафиксированной, например - с применением соединения винт-гайка, на подложке фиксации пальцев перчатки, где:
1 - модуль управления,
3 - модуль двигателя сгибания кисти руки,
4 - сменный модуль сгибания (вверх/вниз) кисти и/или пальцев руки,
6 - подложка для фиксации пальцев,
7 - модуль двигателя сгибания пальцев руки,
10 - перчатка, с фиксаторами пальцев 22 (Фиг. 7), выполненными в виде пластиковых наконечников, вставленных внутрь концов пальцев перчатки 10а, 10б, 10в и 10г.
На Фиг. 4 представлены детали, составляющие модуль двигателя сгибания кисти руки 3, где:
11 - шаговый двигатель,
12 - основание для крепления двигателя,
13 - планетарный редуктор,
14 - промежуточный цилиндр,
15 - фиксирующая крышка,
16 - штырь механической защиты,
17 - крышка модуля.
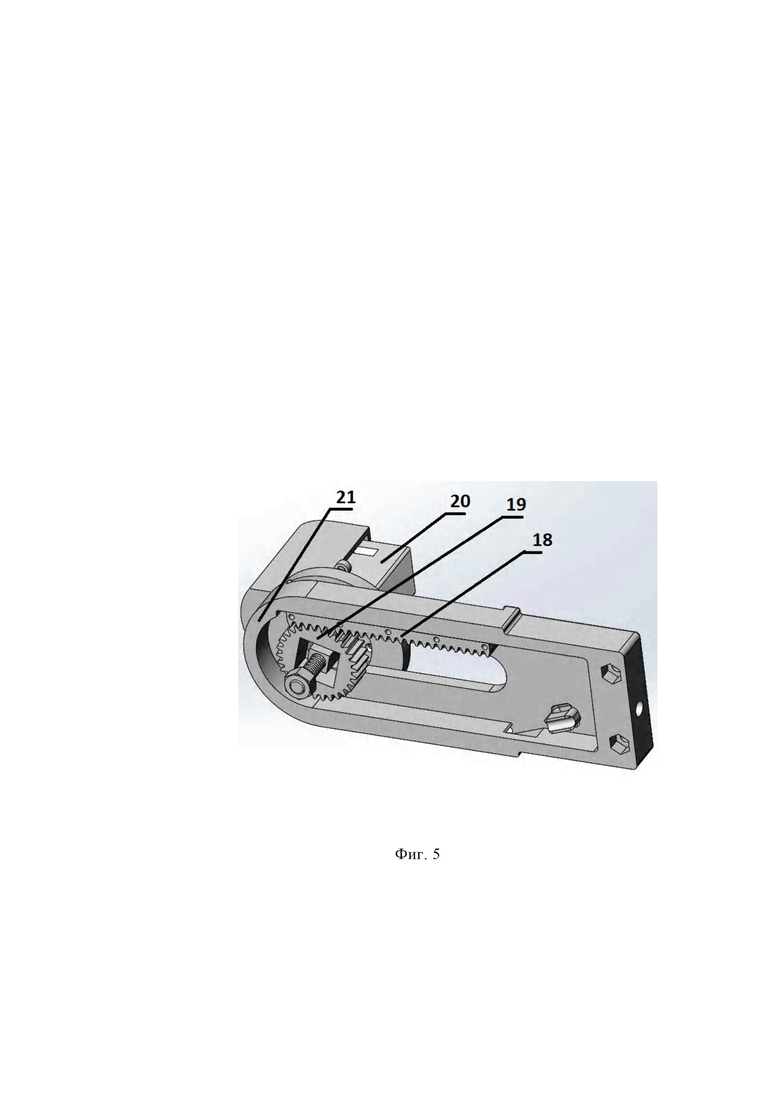
На Фиг. 5 представлен модуль сгибания пальцев кисти руки, где:
18 - рейка-шестерня,
19 - шестерня,
20 - сервопривод,
21 - П-образная пластина с закругленной передней частью.
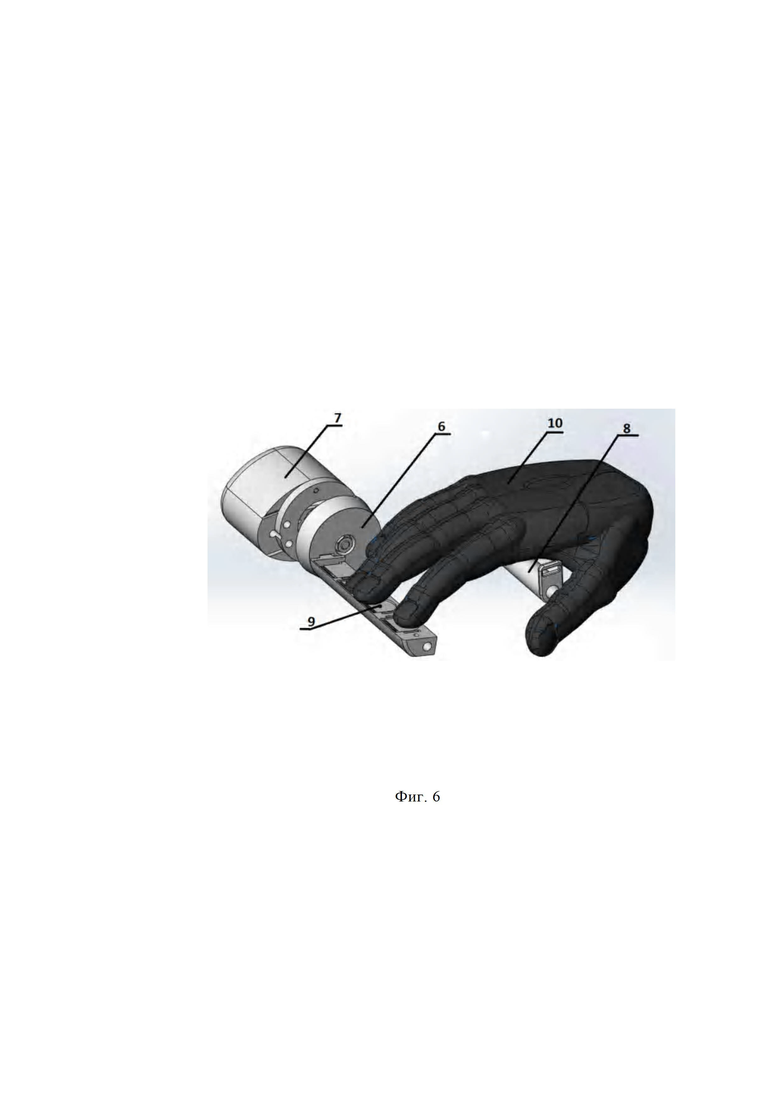
На Фиг. 6 представлена зафиксированная на подложке фиксации пальцев перчатка, где:
6 - подложка для фиксации пальцев,
7 - модуль двигателя сгибания пальцев руки,
8 - суппорт-фиксатор кисти руки,
9 - отверстия для крепления пальцев перчатки,
10 - перчатка.
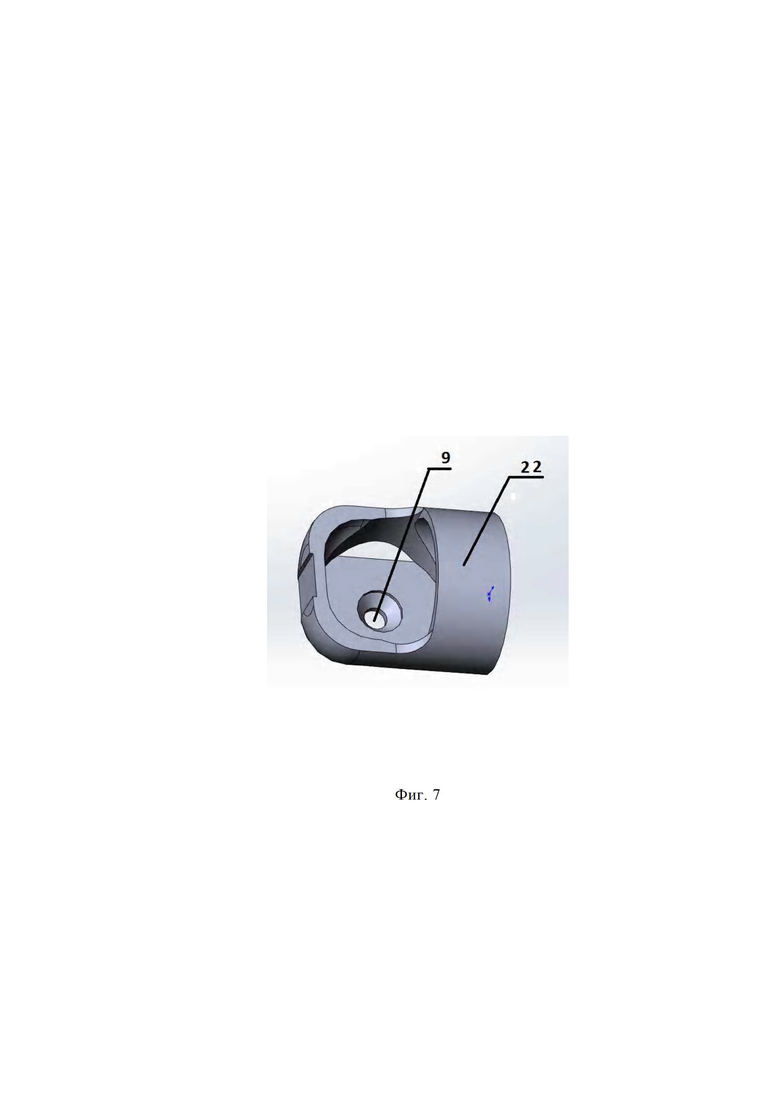
На Фиг. 7 представлен пластиковый фиксатор пальцев, где:
22 - пластиковый фиксатор пальцев,
9 - отверстие для крепления пальцев перчатки.
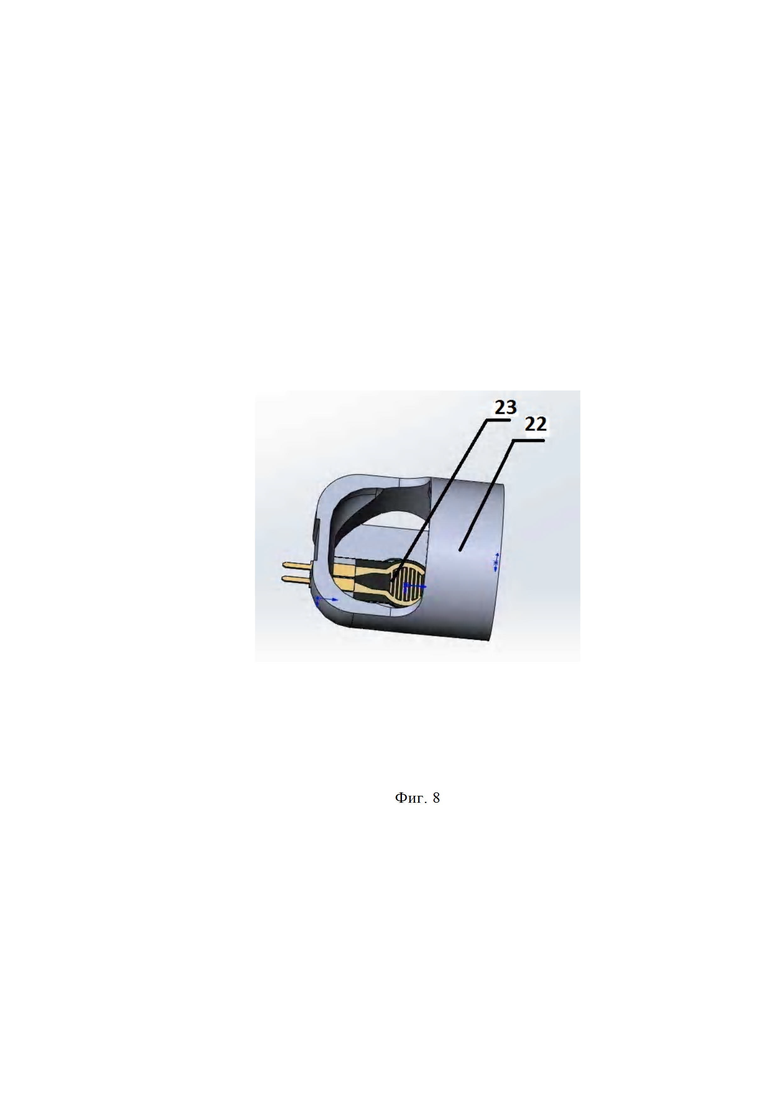
На Фиг. 8 представлен пластиковый фиксатор пальцев, где:
22 - пластиковый фиксатор пальцев,
23 - датчик давления пальцев, например - тензометрический фольговый датчик.
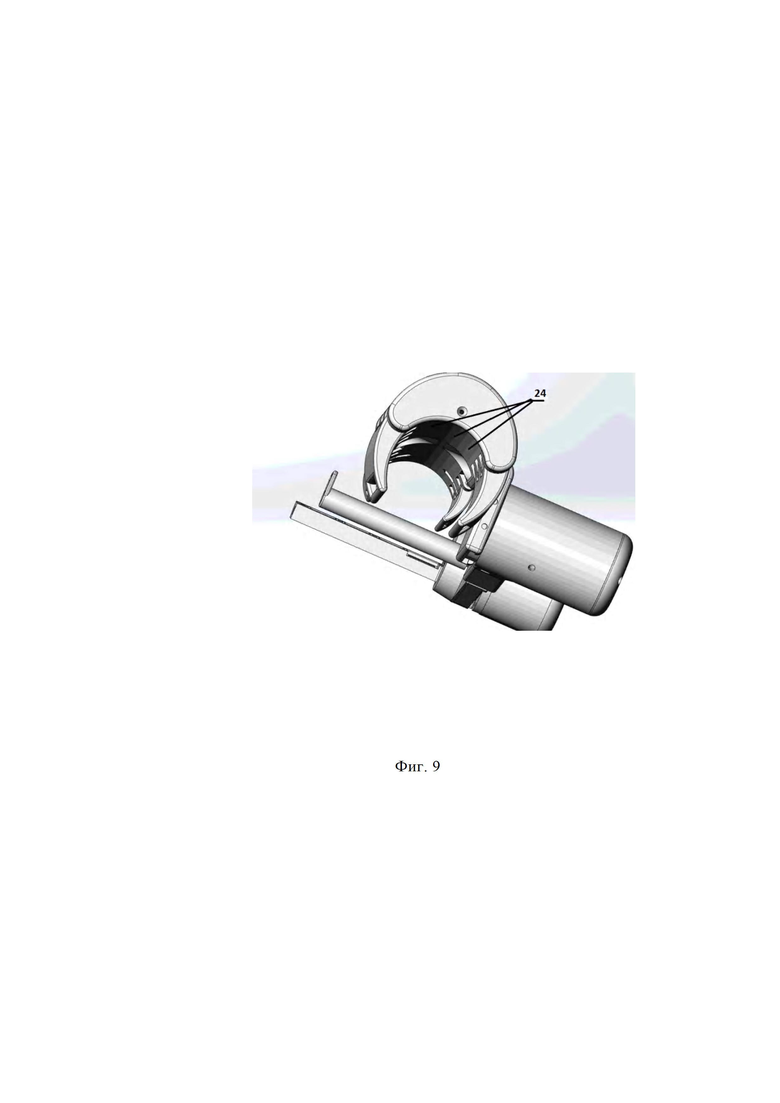
На Фиг. 9 представлено место размещения чувствительных элементов миосенсоров 24 (например, выполненных из металлической ткани) закрепленных на внутренней стороне модуля управления 1 (Фиг. 1).
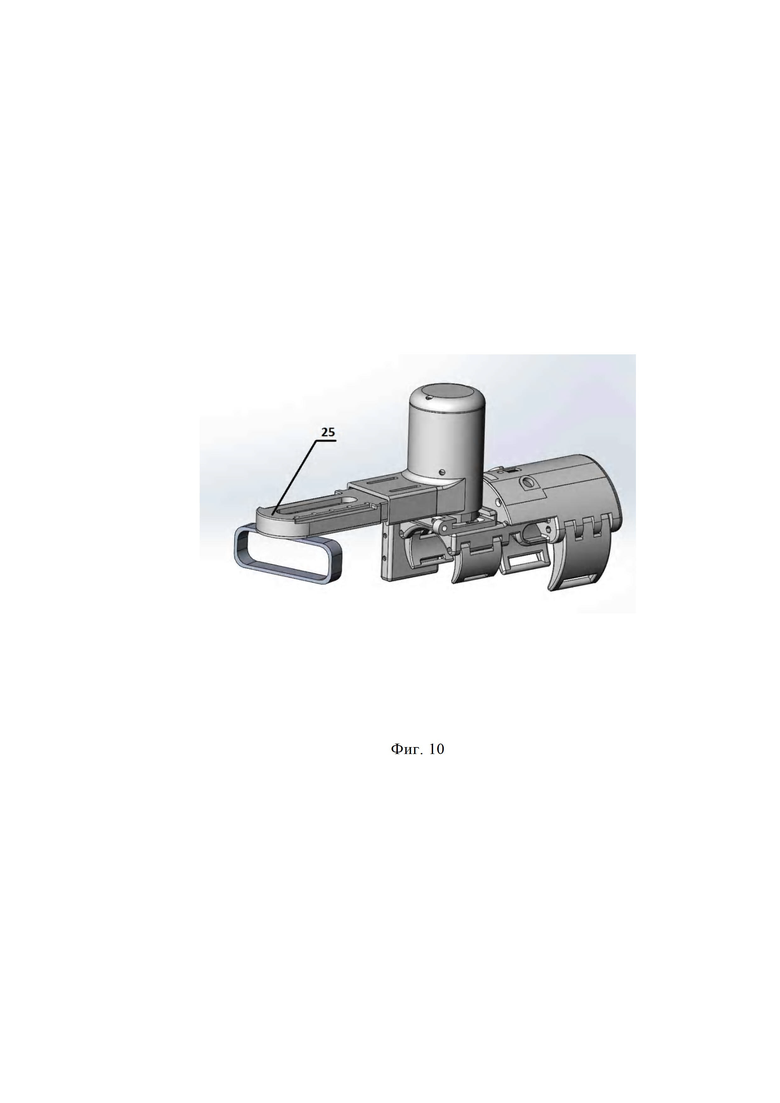
На Фиг. 10 представлен сменный модуль 25 сгибания кисти руки вправо/влево.
На Фиг. 11 изображен прототип - аппарат Flex 05:
На Фиг. 11а изображен общий вид аппарата Flex 05 в процессе его использования.
На Фиг. 11в и б представлены основные функциональные элементы, детали и узлы аппарата Flex 05, где:
26 - лоток для фиксации предплечья,
27 - ручка пронации/супинации,
28 - пульт управления,
29 - фиксатор для стойки пронации/супинации,
31 - фиксатор для ручки пронации/супинации и водило для сгибания/разгибания и девиации,
32 - сетевой кабель,
33 - фиксатор высоты лотка предплечья для сгибания/разгибания и девиации,
34 - стойка для пронации/супинации,
35 - ручка для сгибания/разгибания и девиации,
36 - водило сгибания/разгибания и девиации,
37 - фиксатор высоты ручки сгибания/разгибания и девиации,
38 - выключатель «ON/OFF» (электроcеть),
39 - порт USB.
На Фиг. 12 представлена блок-схема подключения к микроконтроллеру электронных компонентов, расположенных в модуле управления 1, где:
40 - управляющий микроконтроллер,
41 - шаговый двигатель,
42 - контроллер шагового двигателя,
43 - модуль преобразователя напряжения питания для шагового двигателя,
44 - сервопривод,
45 - контроллер для управления сервоприводом,
46 - модуль миосенсора,
47 - чувствительные элементы миосенсора,
48 - модуль сенсора кожно-гальванической реакции,
49 - датчики для измерения кожно-гальванической реакции пациента,
50 - Bluetooth - модуль,
51 - датчики давления пальцев кисти руки.
Далее заявителем представлено описание заявленного технического решения.
Функционально заявленный тренажер состоит из двух основных частей, установленных у пациента и лечащего врача соответственно:
1. Оборудование с предварительно установленным программным обеспечением (ПО) у пациента, включает:
- электронно-механический блок, включающий в себя шаговый двигатель и сервопривод;
- набор сенсорных датчиков для обеспечения обратной связи - датчиков поверхностной электромиографии (ЭМГ),
- датчиков контроля кожно-гальванической реакции организма (КГР), расположенных в модуле управления 1 (Фиг. 1) и
- датчиков усилия давления пальцев, например - тензометрических, расположенных в перчатке;
- блок управления 1 (Фиг. 1) на базе микроконтроллера, например - Arduino, для управления электронно-механическим модулем и выполняющий сбор, обработку объективных данных пациента, полученных с датчиков и передачи этих данных через канал Bluetooth на компьютер пациента;
- компьютер, с предварительно установленным на нем программным обеспечением и по заданной программе через канал Bluetooth управляющий тренажером, а также (компьютер) посредством сети Интернет (по Wi-Fi) передающий объективные данные пациента управляющему процессом реабилитации медперсоналу, осуществляющему контроль, анализ и корректировку хода процесса реабилитации.
2. Оборудование на стороне лечащего врача, включающее компьютер с базой данных о пациенте.
Далее заявителем приведено подробное описание приведенного на Фиг. 1 электронно-механического блока.
Электронно-механический блок содержит:
- модуль управления 1, выполненный в виде полого пластикового корпуса, фиксируемого на предплечье пациента (Фиг. 1).
При этом модуль управления 1 закрепляют на внешней стороне предплечья с помощью ремней на липучке, плотно охватывающих снизу предплечье.
Ремни пришиты к четырем ушкам 2 внизу модуля управления 1 (Фиг. 1), выполненным (ушки) в виде дверных петель.
- модуль двигателя сгибания кисти руки 3 (Фиг. 1), фиксируемый с внешней стороны предплечья с помощью Г-образной пластины 5 (Фиг. 1) с загнутыми в виде пазов краями, путем вставления модуля 3 в пазы пластины 5 (Фиг. 1) и закрепления пластины 5 на передней плоской площадке модуля управления двумя винтами ( на Фиг. не указаны).
- сменный модуль сгибания пальцев кисти руки 4 (Фиг. 1), вставляемый в модуль двигателя сгибания кисти руки 3 и фиксируемый с помощью регулировочных винтов (на Фиг. не показаны).
- модуль двигателя сгибания пальцев руки 7 (Фиг. 1), имеющий возможность совершать линейные движения в пазах модуля 4.
- подложку фиксации пальцев перчатки 6 (Фиг. 1), которая (подложка) вращается вокруг своей поперечной оси и обеспечивает возможность вращения закрепленной на ней перчатки 10 с встроенными в нее (перчатку) изнутри в кончики пальцев пластиковыми фиксаторами пальцев 22 (Фиг. 7) посредством соединения винт-гайки устанавливаемых в отверстие 9. В нижней части фиксаторов пальцев 22 (Фиг. 7) закреплены датчики давления 23 (Фиг. 8) отдельно для каждого из четырех пальцев для фиксации руки и для обеспечения возможности естественного сгибания пальцев.
- суппорт-фиксатор кисти руки 8 (Фиг. 1), закрепленный к сменному модулю сгибания кисти и пальцев руки 4 (Фиг. 1) с помощью крепления типа винт-гайка (на Фиг. не показаны).
Далее заявителем более подробно описаны перечисленные выше модули электронно-механического блока.
Внутри модуля управления 1 (Фиг. 1) расположены:
- управляющий микроконтроллер,
- контроллер шагового двигателя для сгибания/разгибания кисти,
- контроллер для управления сервоприводом для сгибания/разгибания пальцев,
- Bluetooth-модуль связи,
- модуль сенсора кожно-гальванической реакции организма пациента,
- модуль миосенсора, чувствительные элементы которого 24 в количестве трех штук (Фиг. 9) установлены на внутренней стороне модуля управления 1 (чувствительные элементы выполнены, например, из металлической ткани),
- модуль повышающего преобразователя напряжения для питания шагового двигателя,
- аккумуляторные батареи для питания всех электронных компонент и модулей.
Модуль двигателя сгибания кисти руки 3 (Фиг. 1, 4) состоит из:
- модуля шагового двигателя 11,
- зафиксированного винтами крепления в основании 12,
- имеющего пазы, обеспечивающие возможность вставляться в Г-образную пластину 5 (Фиг. 2) на внешней стороне предплечья, в который имеется возможность вставлять дополнительный модуль фиксации кисти руки для сгибания кисти вправо-влево 25,
- планетарного редуктора 13 с передаточным отношением 1:189,
- промежуточного цилиндра 14,
- в который вставляют планетарный редуктор 13,
- и фиксируют крышкой 15, которая, в свою очередь, фиксируется за счет шлицевого соединения на валу двигателя 11,
- штыря механической защиты 16,
- который крепится к шаговому двигателю 11 с использованием винтов, ограничивающий (штырь на Фиг. 1 не показан, но показан на Фиг. 4 поз. 16) угол вращения модуля двигателя сгибания кисти руки 3 (Фиг. 1) - такое ограничение угла вращения модуля двигателя сгибания кисти 3 руки предотвращает возможность повреждение кисти руки в процессе сеанса реабилитации.
- абсолютного энкодера (на Фиг. не показан), выполненного в виде потенциометра для замера угла поворота модуля, который размещен в крышке 17 (см. Фиг. 4), фиксируемого к корпусу модуля двигателя саморезами (последние не указаны).
Для передачи крутящего момента шагового двигателя (Фиг. 4 поз. 11) используется шлицевое соединение (поз. не указаны) - продольные выступы внутри корпуса 3 и впадины на деталях 14 и 15 (также на Фиг. не указаны).
Модуль сгибания пальцев кисти руки 4 (Фиг. 5) выполнен в виде:
- П-образной пластины 21 с закругленной передней частью и имеющей внутреннюю полость по периметру.
- вверху П-образной пластины 21 изнутри закреплена рейка-шестерня 18.
- часть модуля 4, выполненная с возможностью перемещения вдоль модуля 4, состоит (часть модуля 4) из сервопривода 20, размещенного в модуле двигателя сгибания пальцев руки 7, который (сервопривод 20) при вращении шестерни 19, закрепленной на его оси, примыкает к рейке-шестерне 18 и перемещается вдоль П-образной пластины 21. Длина рейки-шестерни 18 выполнена таким образом, чтобы обеспечить максимальные углы сгибания пальцев (например, для проксимальной фаланги до 80 угловых градусов, средней фаланги - до 80 угловых градусов и дистальной фаланги - до 85 угловых градусов) - для обеспечения возможности полного сгибания/разгибания пальцев руки. Используемый в заявленном техническом решении сервопривод 20 имеет обратную связь по углу поворота оси - снабжен выполненным в виде потенциометра встроенным абсолютным энкодером, позволяющим контролировать угол поворота оси сервопривода 20.
- на вал сервопривода 20 с обратной стороны П-образной пластины закреплена поперечная подложка фиксации пальцев 6 одеваемой на руку перчатки 10 (Фиг. 6).
Таким образом, вращая свою ось, сервопривод 20, размещенный в модуле двигателя сгибания пальцев руки 7, обеспечивает вращательно-поступательное движение, чем обеспечивает сгибание пальцев внутрь кисти и разгибание пальцев - при обратном движении.
Далее заявителем описан способ фиксации руки пациента в перчатке 10 к заявленному тренажеру.
Для реабилитации кисти путем ее принудительного сгибания/разгибания вверх/вниз на модуль сгибания пальцев кисти руки 4 (Фиг. 1) закрепляют с помощью крепления винт-гайка поперечный суппорт ладони 8 (Фиг. 2), подпирающий снизу в зоне основания большого пальца кисть руки, и фиксируют кисть руки на суппорте 8, например, с помощью ленты-липучки. Суппорт 8 обеспечивает надежное крепление кисти к модулю сгибания (вверх/вниз) кисти и пальцев руки 4 (Фиг. 1) при движении кисти вверх/вниз и позволяет приложить максимальное усилие при сгибе кисти в статическом режиме. Перчатка 10 (Фиг. 6) для фиксации кисти руки выполнена обеспечивающей возможность одеть перчатку на руку пациента даже с высокой степенью контрактуры кисти и/или пальцев. Для этого на каждом пальце перчатки сбоку выполнен разрез, позволяющий фиксировать в пальцах перчатки каждый палец пациента независимо (от других пальцев) с использованием ленты-липучки. Перчатку 10 фиксируют на кисти руки так же лентой-липучкой. Для надежной фиксации каждого пальца в перчатке в районе основания мизинца и указательного пальцев на перчатке 10 закрепляют конец двух лент-липучек, вторым концом эти ленты-липучки фиксируют на ленте-липучке, обхватывающей кисть руки как браслет. Внутри перчатки на конце каждого пальца перчатки расположен фиксатор пальца 22 (Фиг. 7) с отверстием 9 (Фиг. 7), на дне которого крепится датчик давления пальца 23 (Фиг. 8). Этот же фиксатор пальцев 22 используют для крепления посредством соединения винт-гайка пальцев перчатки 10 (Фиг. 6) к поперечной планке модуля в отверстие 9 (Фиг. 7).
Практически процесс фиксации руки пациента в перчатке происходит следующим образом.
Перчатку 10 (Фиг. 6) фиксируют на подложке фиксации пальцев 6 (Фиг. 1). Под фиксацией пальцев и кисти руки для выполнения реабилитационных упражнений подразумевают следующие действия: реабилитируемую кисть и пальцы руки пациента вставляют в перчатку - до упора пальцев руки на установленные в концах пальцев перчатки фиксаторы пальцев 22 (Фиг. 8) и создания контакта кожи пальцев с датчиками давления (пальцев) 23 (Фиг. 8). После этого находящиеся в перчатке пальцы фиксируют на подложке фиксации пальцев 6 (Фиг. 1), например - с применением соединения винт-гайка, предварительно, например - с использованием ленты-липучки, опоясывая пальцы перчатки (с находящимися в них пальцами руки) фиксирующими лентами-липучками, расположив ленты-липучки в промежутках между суставами пальцев в не мешающих движению суставов положениях. С сохранением возможности выполнения естественных движений кисти без помех таким же образом на суппорте-фиксаторе кисти руки 8 (Фиг. 1) с помощью ленты-липучки фиксируют реабилитируемую кисть руки.
Процесс принудительного сгибания пальцев заявленного тренажера отличается от прототипа тем, что сгибание пальцев обеспечивается путем вращения оси сервопривода 20 (Фиг. 5), который размещается в корпусе 7 (Фиг. 1), например - пластиковом, модуля сгибания пальцев кисти руки, которая (ось сервопривода) в свою очередь вращает подложку фиксации пальцев перчатки 6 (Фиг. 2) вокруг своей поперечной оси, к которой (подложке) зафиксирована кисть руки посредством надетой перчатки 10 (Фиг. 6).
За счет использования механизма рейка-шестерня 18 (Фиг. 5) обеспечивается возможность одновременного выполнения как вращательного, так и поступательного движения подложки с зафиксированной на подложке, одетой на руку, перчатки 6 (Фиг. 1) внутрь кисти при сгибании и наружу - для разгибания пальцев. Считывание данных встроенного в сервопривод энкодера 20 (Фиг. 5) позволяет осуществлять постоянный мониторинг угла сгибания пальцев и корректировать процесс реабилитации, чем обеспечивается повышенная, по сравнению с прототипом, эффективность процесса реабилитации.
Таким образом, процесс реабилитации двигательных навыков кисти и/или пальцев руки, путем принудительного их (кисти, пальцев) сгибания/разгибания вверх/вниз у заявленного технического решения отличается от прототипа тем, что процесс обеспечивается использованием отсутствующего у прототипа шагового двигателя 11 (Фиг. 4), который через планетарный редуктор 13 (Фиг. 4) передает вращательный момент на модуль двигателя для сгибания кисти руки 4 (Фиг. 1).
За счет использования шагового двигателя с шагом, например - 0,9 углового градуса и планетарного редуктора, например - с передаточным числом 1:189, обеспечиваются точное позиционирование кисти руки в требуемом положении и управляемо задаваемое усилие, необходимое при использовании статического метода реабилитации.
Режим и параметры действий для реабилитации статического метода устанавливают с использованием обратной связи, осуществляемой с использованием выполненного в виде потенциометра абсолютного энкодера.
Энкодер размещен в крышке 17 (Фиг. 4), фиксируемой к корпусу модуля двигателя сгибания кисти руки 3 (Фиг. 1) саморезами и обеспечивает возможность контроля и управляемого установления угла сгибания/разгибания кисти руки. В ходе процесса реабилитации кисти и пальцев руки пациента с использованием программного обеспечения компьютера осуществляют постоянный мониторинг и анализ электрических сигналов мышц предплечья с использованием сенсоров 24 (Фиг. 9), установленных в нижнюю часть блока управления. Эти сенсоры обеспечивают замер и передачу миосигналов для контроля и управляемого изменения (в случае необходимости) режима работы заявленного тренажера.
Измеренные показатели сигналов при непосредственном контакте пациента и лечащего врача отслеживаются на месте проведения реабилитационного процесса на компьютере пациента.
При взаимоудаленности пациента и лечащего врача показатели сигналов и корректирующие ход процесса реабилитации сигналы передаются дистанционно, с использованием Bluetooth и сети Интернет.
При этом в ходе реабилитационного процесса психоэмоциональное состояние пациента и анализ болевых ощущений контролируют с использованием датчиков кожно-гальванической реакции организма (КГР), одетых на указательный и средний пальцы здоровой руки (датчики КГР не указаны на Фиг.).
Далее заявителем приведено описание процесса подготовки заявленного технического решения для проведения сеансов реабилитации с использованием заявленного устройства.
Перед началом сеанса реабилитации с пациентом производят внешний осмотр и убеждаются в исправности заявленного тренажера.
Пациента комфортно усаживают, например - в кресло за столом. На внешней стороне предплечья больной руки пациента с использованием плотно охватывающих снизу предплечье ремней на липучке фиксируют модуль управления тренажера 1 (Фиг. 1).
Пальцы пациента вставляют в пальцы перчатки 10 (Фиг. 6) и фиксируют (пальцы перчатки) на подложке фиксации пальцев перчатки 6 (Фиг. 2) крепежными винтами, ладонь пациента фиксируют на суппорт-фиксаторе кисти руки 8 (Фиг. 1) с помощью ленты на липучке.
На здоровой руке пациента на среднем и указательном пальцах фиксируют датчики для измерения кожно-гальванической реакции пациента. Датчики для измерения кожно-гальванической реакции закрепляют в выполненном из эластичной ткани напальчнике.
От источника электропитания на модуль управления тренажера 1 (Фиг. 1) подают напряжение путем нажатия кнопки включения, расположенной в верхней части модуля управления тренажера 1 (Фиг. 1).
После этого тренажер под управлением программного обеспечения автоматически устанавливается в стартовое положение - т.е. подложка фиксации пальцев 6 (Фиг. 2) устанавливается в крайнее переднее положение, обеспечивая полное раскрытие (выпрямление пальцев) кисти пациента, модуль сгибания кисти 4 (Фиг. 1) устанавливается в горизонтальное положение.
Включают электропитание входящего в состав тренажера компьютера, после чего программное обеспечение автоматически устанавливает связь между модулем управления тренажера 1 (Фиг. 1) и компьютером с использованием беспроводного канала Bluetooth.
При этом считается, что компьютер на стороне лечащего врача уже включен.
При наличии возможности использования сети Интернет по Wi-Fi происходит подключение, устанавливается соединение с компьютером лечащего врача и проверяется наличие обновления конфигурационного файла для модуля управления тренажера, где прописаны режимы работы тренажера.
Если файл конфигурации тренажера был обновлен лечащим врачом с целью оптимизации процесса реабилитации - файл конфигурации скачивается и устанавливается через компьютер пациента на тренажер автоматически.
На компьютере запускают прилагаемое программное обеспечение, выбирают режим использования тренажера - для кисти или пальцев, конкретный режим для кисти или конкретный режим для пальцев (режимы описаны ниже) и начинают процесс реабилитации и/или тренировки.
В процессе работы тренажера с помощью миосенсоров и датчиков кожно-гальванической реакции организма снимают биометрические данные, которые затем передают и записывают, например - в компьютере пациента, например - для анализа процесса реабилитации лечащим врачом.
Программное обеспечение, установленное на компьютере пациента, осуществляет передачу биометрических данных через сеть Интернет по Wi-Fi на компьютер лечащего врача.
При отсутствии возможности использования сети Интернет в момент проведения сеанса реабилитации данные записываются в компьютер, находящийся на стороне пациента. Записанные данные затем передают для анализа процесса реабилитации лечащему врачу позже, при появлении возможности подключиться к сети Интернет.
Далее заявителем приведены примеры осуществления основных режимов реабилитации (работы) с использованием заявленного тренажера, которые и/или комбинации которых выбираются лечащим врачом в зависимости состояния и/или диагноза пациента.
Пример 1. Принудительное сгибание и/или разгибание кистевых суставов вверх-вниз.
Принудительное сгибание и/или разгибание кистевых суставов вверх-вниз с фиксацией в любом заранее заданном с помощью программного обеспечения положении, например, следующим образом:
- Модуль управления тренажера 1 (Фиг. 1) фиксируют на внешней стороне предплечья с помощью плотно охватывающих снизу предплечье ремней на липучке, пришитых к выполненным в виде дверных петель четырем ушкам 2 (Фиг. 1) внизу модуля управления 1 (Фиг. 1).
- Кисть пациента, одетую в перчатку 10 (Фиг. 6) фиксируют на подложке, заранее зафиксированной крепежными винтами в отверстиях 9 (Фиг. 6) фиксации пальцев перчатки 6 (Фиг. 1).
- Ладонь пациента с применением ленты на липучке фиксируют на суппорт-фиксаторе кисти руки 8 (Фиг. 1). В зависимости от устанавливаемого лечащим врачом пациенту и тренажеру режима работы - углов сгибания вверх и вниз, вынуждающей сгибающе/разгибающей кисть и пальцы силы - модуль управления 1 (Фиг. 1) формирует и отправляет управляющий сигнал на шаговый двигатель 11 (Фиг. 4), который передает вращательный момент на сменный модуль сгибания кисти и пальцев руки 4 (Фиг. 1), который сгибает/разгибает кисть на заданный угол.
- В процессе сгибания/разгибания кисти контроллер модуля управления 1 (Фиг. 1) постоянно производит мониторинг заданного угла сгибания путем снятия данных с выполненного в виде потенциометра энкодера, который размещен в крышке 17 (Фиг. 4) модуля двигателя сгибания кисти руки 3 (Фиг. 1).
Пример 2. Принудительное сгибание и/или разгибание кистевых суставов влево-вправо.
Сгибание и разгибание кистевых суставов влево-вправо с фиксацией в любом заранее заданном с помощью программного обеспечения положении, например, следующим образом:
- Модуль управления тренажера 1 (Фиг. 1) фиксируют на внешней стороне предплечья с помощью с плотно охватывающих снизу предплечье ремней на липучке, пришитых к выполненным в виде дверных петель четырем ушкам 2 (Фиг. 1) внизу модуля управления 1 (Фиг. 1).
- Модуль двигателя сгибания кисти руки 3 (Фиг. 1) крепят к передней площадке модуля управления 1 (Фиг. 1) сверху путем вставления в пазы пластины 5 (Фиг. 1).
- В модуль двигателя сгибания кисти руки 3 (Фиг. 1) вставляют сменный модуль сгибания кисти (вправо/влево) 25 (Фиг. 10).
- Кисть пациента фиксируют в сменном модуле сгибания 25 (Фиг. 10) ремнями на липучке.
- В зависимости от заранее заданного с помощью программного обеспечения режима работы тренажера - углов сгибания вправо/влево - модуль управления 1 (Фиг. 1) формирует и отправляет управляющий сигнал на шаговый двигатель 11 (Фиг. 4), который передает вращательный момент на сменный модуль сгибания кисти и пальцев руки (вправо/влево) 25 (Фиг. 10), который сгибает/разгибает кисть на заданный угол. В процессе сгибания/разгибания кисти контроллер модуля управления 1 (Фиг. 1) постоянно производит мониторинг заданного угла сгибания путем снятия данных с энкодера, выполненного в виде потенциометра, который размещен в крышке 17 (Фиг. 4) модуля блока двигателя сгибания кисти руки 3 (Фиг. 1).
Пример 3. Сгибание и разгибание суставов пальцев с учетом физических возможностей пациентов, выявленных путем анализа состояния за счет обратной биологической связи с использованием датчиков давления и дозировки прилагаемых усилий.
В зависимости от потребности тренажером предусмотрено три режима реабилитации,
3.1. Активный режим - пальцы принудительно сгибает тренажер, например, следующим образом:
- При работе с пальцами пациента суппорт-фиксатор кисти руки 8, не используемый в активном режиме реабилитации (Фиг. 1), снимают с модуля сгибания кисти и пальцев руки 4 (Фиг. 1) путем отвинчивания фиксирующей гайки.
- Модуль управления тренажера 1 (Фиг. 1) фиксируют на внешней стороне предплечья с помощью с плотно охватывающих снизу предплечье ремней на липучке, пришитых к выполненным в виде дверных петель четырем ушкам 2 (Фиг. 1) внизу модуля управления 1 (Фиг. 1).
- Кисть с пальцами пациента вставляют в перчатку.
- Перчатку 10 (Фиг. 3) с кистью пациента фиксируют крепежными винтами в отверстиях 9 (Фиг. 6) на подложке фиксации пальцев перчатки 6 (Фиг. 1).
- В зависимости от заданного программным обеспечением компьютера режима работы тренажера, например - углов сгибания пальцев, модуль управления 1 (Фиг. 1) формирует и отправляет управляющий сигнал на серводвигатель 20 (Фиг. 5) модуля сгибания кисти и пальцев руки 4 (Фиг. 1), который, вращая шестерню 19 (Фиг. 5), примыкающей к рейке-шестерне 18 (Фиг. 5), вращает подложку фиксации пальцев 6 (Фиг. 1) и одновременно перемещается вдоль модуля сгибания кисти и пальцев руки 4 (Фиг. 1), обеспечивая тем самым сгибание/разгибание пальцев руки пациента на управляемо заданный лечащим врачом угол.
- В процессе сгибания/разгибания пальцев контроллер модуля управления 1 (Фиг. 1) постоянно производит мониторинг заданного угла сгибания путем считывания данных со встроенного в сервопривод энкодера.
- Результаты мониторинга поступают в компьютер лечащего врача, анализируются им.
- В результате анализа в управляющую работой тренажера компьютерную программу лечащий врач вносит необходимые поправки, чем корректирует работу заявленного тренажера и ход процесса реабилитации.
3.2 Полуактивный режим - осуществляют, например, следующим образом:
- При работе с пальцами пациента суппорт-фиксатор кисти руки 8, не используемый в полуактивном режиме реабилитации (Фиг. 1), снимают с модуля сгибания кисти и пальцев руки 4 (Фиг. 1) путем отвинчивания фиксирующей гайки.
- Затем на реабилитируемую руку одевают перчатку тренажера, фиксируют кисть и пальцы в перчатке.
- После этого пациент с одетой в перчатку кистью и пальцами руки, самостоятельно, насколько может, пытается согнуть или сгибает пальцы,
- далее пациенту сгибать пальцы до заданного в компьютерной программе естественного положения “помогает” тренажер.
Происходит это, например, следующим образом:
- Пациент вдевает пальцы и кисть реабилитируемой руки в перчатку тренажера. Затем модуль управления тренажера 1 (Фиг. 1) фиксируют на внешней стороне предплечья с помощью с плотно охватывающих снизу предплечье ремней на липучке, пришитых к выполненным в виде дверных петель четырем ушкам 2 (Фиг. 1) внизу модуля управления 1 (Фиг. 1).
- Кисть пациента, одетую в перчатку 10 (Фиг. 6) фиксируют на подложке фиксации пальцев перчатки 6 (Фиг. 1) крепежными винтами в отверстиях 9 (Фиг. 6).
- Далее по сигналу с модуля управления тренажером 1 (Фиг. 1) подложку фиксации пальцев устанавливают в положение, при котором обеспечивается расположение дистальных фаланг пальцев под углом 90 градусов к плоскости кисти. Затем по команде лечащего врача пациент с максимально возможной силой пытается согнуть кисть с пальцами.
- При этом максимально развиваемую силу давления пальцев на датчики давления 23 (Фиг. 8) внутри перчатки в фиксаторах пальцев 22 (Фиг. 8) фиксирует контроллер, расположенный в модуле управления тренажером 1 (Фиг. 1).
- Максимальное значение силы давления пальцев пациента принимают за условные 100 %.
Далее, по усмотрению лечащего врача, в процессе реабилитации управляемо дозируют силу давления пальцев пациента, например, задав 30% от максимального значения, при достижении которого на сервопривод 20 (Фиг. 5) поступает сигнал от контроллера модуля управления тренажером 1 (Фиг. 1) и тренажер выполняет сгибательное движение зафиксированных в перчатке пальцев.
Таким путем, постепенно и управляемо (под контролем лечащего врача) изменяя нагрузку на мышцы пальцев, обеспечивают управляемый и корректируемый процесс реабилитации сгибательных движений пальцев руки.
3.3 Режим пассивный - осуществляют, например, следующим образом:
- Модуль управления тренажера 1 (Фиг. 1) фиксируют на внешней стороне предплечья с помощью с плотно охватывающих снизу предплечье ремней на липучке, пришитых к выполненным в виде дверных петель четырем ушкам 2 (Фиг. 1) внизу модуля управления 1 (Фиг. 1).
- Кисть пациента вдевают в перчатку 10 (Фиг. 6) и фиксируют на подложке фиксации пальцев перчатки 6 (Фиг. 1).
- Пальцы перчатки фиксируют крепежными винтами в отверстиях 9 (Фиг. 6), суппорт-фиксатор кисти руки 8 (Фиг. 1) работе с пальцами пациента не используется и должен быть снят с модуля сгибания кисти и пальцев руки 4 (Фиг. 1) путем отвинчивания фиксирующей гайки.
- Далее подложку фиксации пальцев 6 (Фиг. 1) с помощью сигнала управления с модуля управления тренажером 1 (Фиг. 1) устанавливают в положение, при котором обеспечивается расположение дистальных фаланг пальцев пациента под углом 90 градусов к плоскости кисти.
- На прилагаемом к тренажеру компьютере запускается программное обеспечение, где указано, какой палец и с каким усилием необходимо согнуть.
Шкалу прилагаемых усилий формируют на основе способа, приведенного в предыдущем пункте 3.2 Примера 3.
Пациент выполняет упражнение, пытаясь сгибать пальцы, при этом силу давления пальцев на датчики давления 23 (Фиг. 8), расположенные в фиксаторах пальцев 22 (Фиг. 8) внутри перчатки 10 (Фиг. 6) фиксирует контроллер, расположенный в модуле управления тренажером 1 (Фиг. 1) и сравнивает с заранее заданными в программном обеспечении параметрами.
Результат выполнения упражнения выводят на монитор компьютера, а лечащий врач и пациент имеют возможность визуально наблюдать процесс реабилитации в режиме реального времени. Это способствует более результативному процессу реабилитации, по сравнению с прототипом, восстановлению (реабилитации) тонуса и мелкой моторики пальцев пациента вследствие возможности визуального мониторинга и контроля за выполнением собственно процесса реабилитации, вследствие того что пациент наблюдает динамику процесса реабилитации, что способствует положительной психологической реакции на процесс реабилитации, т.к. процедура реабилитации напоминает игровой режим.
Таким образом, заявленный технический результат достигают за счет того, что:
- в процессе восстановления лечащий врач диагностирует состояние пациента, определяет и назначает необходимые для реабилитации технические показатели процесса. Эти назначенные показатели вводят в управляющую заявленным тренажером компьютерную программу, устанавливают заявленный тренажер на реабилитируемую руку тела пациента, запускают тренажер и прилагаемый к тренажеру компьютер на стороне пациента и компьютер на стороне лечащего врача.
В процессе выполнения реабилитационного процесса осуществляют мониторинг (отслеживание показателей), например - зрительный или дистанционный, например - непрерывный инструментальный с применением известных компьютерных и коммуникационных технологий, происходящих в организме пациента процессов.
По результатам мониторинга производят своевременную корректировку курса (хода процесса) реабилитации путем замера, сбора и анализа объективных данных, полученных с помощью биометрических датчиков, тем самым оптимизируя процессы восстановления, а именно:
- путем замера электрических сигналов мышц тыльной поверхности предплечья с помощью миосенсоров (датчиков поверхностной электромиографии (ЭМГ) (при необходимости контроля электрических сигналов мышц, расположенных по ладонной поверхности предплечья, существует возможность установки дополнительного модуля миосенсора в модуль управления 1 (Фиг. 1) с размещением чувствительных элементов на плотно охватывающем снизу предплечье (ладонную поверхность предплечья) ремня на липучке),
- путем замера и регистрации психоэмоционального состояния пациента в ходе процесса упражнений с помощью сенсоров кожно-гальванической реакции организма пациента,
- с применением датчиков давления, установленных отдельно для каждого пальца руки, обеспечивающих замер возможности и силы произведенных сгибательных движений пальцев пациента,
- с обеспечением дистанционной передачи полученных объективных данных, например - через Интернет, лечащему врачу с целью мониторинга процесса реабилитации, корректировки режима работы тренажера, например - в режиме on-line.
Технический результат, обеспечивающий достижение заявленной цели, состоит в существенном расширении, по сравнению с прототипом, функциональных возможностей заявляемого тренажера, в обеспечении удобства применения и функциональной приспособленности для разработки кистей и пальцев рук, в том числе - даже при наличии ограничений на передвижение пациента вследствие характера его заболевания, например - из-за травм нижних конечностей. При наличии таких ограничений заявленный тренажер, в отличие от прототипа, обеспечивает для медицинского персонала возможность на расстоянии (дистанционно), в режиме on-line осуществлять процесс реабилитации, выполняя при этом объективный инструментальный (без влияния субъективного человеческого фактора) мониторинг процесса реабилитации со своевременным внесением необходимых изменений (корректировать процесс) в режим использования тренажера.
Таким образом, технический результат применения заявляемого технического решения позволяет выполнять реабилитационные упражнения, как в лечебном учреждении, так и в домашних условиях, но под непосредственным или дистанционным контролем лечащего врача. Такая организация работы позволяет одному лечащему врачу под собственным контролем осуществлять реабилитационные или тренировочные упражнения единовременно с несколькими пациентами.
Таким образом, заявителем достигнуты поставленные цели и заявленные технические результаты, а именно:
1) обеспечена возможность мобильности (вес заявленного тренажера составляет 1,25 кг) и автономной работы тренажера - вне зависимости от наличия розеток электропитания. Например, на одном из действующих вариантов заявленного тренажера для электропитания используют литий-ионные аккумуляторы (2 шт.) типа ICR 18650 электроемкостью 3200 миллиампер⋅час, напряжением =3,7 вольта. С этим источником электропитания реабилитационная работа тренажера обеспечивается в течение 2-3 часов, что позволяет выполнить реабилитационный процесс продолжительностью 30 мин каждый с 4-6 пациентами вне зависимости от наличия розеток электропитания. При этом вместо указанных аккумуляторов возможно использовать любые независимые от электросети источники электропитания.
2) обеспечена возможность фиксации кисти руки и пальцев в позиции, необходимой для реабилитации (восстановления тонуса, подвижности и силы мышц) полностью или частично утративших двигательные функции пальцев, за счет использования специально разработанной перчатки.
3) обеспечена возможность использования заявленного тренажера для осуществления нескольких (более одного) методов реабилитации - динамических и статических методов, тогда как прототип обеспечивает реализацию только динамического метода реабилитации, не позволяя применять статические методы реабилитации. Это свойство заявленного тренажера расширяет область его применения.
4) обеспечена возможность осуществления реабилитации как минимум двух видов органов - для кистей и пальцев рук, тогда как прототип пригоден для реабилитации только кистей рук,
5) обеспечена возможность разрабатывать совместно или в отдельности каждый из зафиксированных пальцев, используя программное обеспечение компьютера на стороне пациента, контролируя при этом силу давления каждого пальца и управляя величиной вынуждающей (сгибающей/ разгибающей пальцы) силы давления на каждый отдельно взятый палец - с использованием сенсоров давления и электрических сигналов мышц с использованием миосенсоров,
6) обеспечена возможность постоянного мониторинга (отсутствующего у прототипа) сигналов мышц с помощью миосенсоров и сигналов болевых ощущений пациента с помощью сенсоров КГР и коррекции в случае необходимости режимов работы тренажера в процессе реабилитации, например - коррекция углов сгибания пальцев или кисти, количества сгибаний, время удержания в заданном положении кисти руки при использовании статического метода реабилитации, увеличение угла сгибания кисти в случае уменьшения болевых ощущений пациента,
7) обеспечена возможность дистанционного использования - без присутствия лечащего врача возле пациента - контроль и коррекция процесса осуществляются как при наличии непосредственного контакта, так и удаленно (дистанционно, на расстоянии) путем передачи данных пациента, замеренных с помощью датчиков, посредством сети Интернет на компьютер лечащего врача и получения в случае необходимости от врача скорректированного файла конфигурации на тренажер для оптимизации процесса реабилитации.
Заявленное техническое решение в полной мере обеспечивает достижение заявленных целей ее создания - является техническим средством с расширенными, по сравнению с прототипом, функциональными возможностями для применения его (технического средства) для реабилитации и/или тренировки как суставов и мышц кистей рук, так и пальцев кистей.
Использование расширенных, по сравнению с прототипом, функциональных возможностей заявленной модели, способствует повышению результативности (эффективности) процесса реабилитации и/или тренировок с разработкой суставов и мышечных групп всей кисти и пальцев, способствует сокращению времени (продолжительности процесса) реабилитации для восстановления двигательных навыков, тонуса и движений в кисти и пальцах рук у пациентов. Таким образом, применение заявленного тренажерного комплекса способствует повышению качества жизни людей в целом.
Необходимо подчеркнуть, что в отличие от способного реализовать только динамический метод реабилитации прототипа, заявленное техническое решение дополнительно применимо для реализации статических методов реабилитации.
Кроме того, заявленное техническое решение в отличие от прототипа применимо как при наличии непосредственного контакта между излечиваемым пациентом и лечащим лицом (накоротке), так и при отсутствии непосредственного контакта между излечиваемым пациентом и лечащим врачом (на расстоянии, дистанционно), например - когда заявленный тренажер на руке излечиваемого пациента устанавливает и запускает процедурная медсестра, а ходом процесса реабилитации управляет находящийся в удалении лечащий врач, при этом находящийся в удалении от пациента лечащий врач обладает возможностью управлять реабилитационным процессом нескольких пациентов, что повышает производительность труда медперсонала при одновременном повышении качества жизни человека в силу возможности использования тренажера в домашних условиях под контролем лечащего врача или тренера.
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, так как из исследованного уровня техники не выявлены технические решения, обладающие заявленной совокупностью признаков, обеспечивающих достижение заявленных технических результатов.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, т.к. применение заявленного технического решения обеспечивает у пациентов или спортсменов восстановление естественных, но утраченных по каким-то причинам, двигательной активности и амплитуды движений лучезапястных суставов кистей и суставов пальцев кистей, а также улучшение мышечного тонуса верхних конечностей. Этим самым применение заявленного технического решения уменьшает пост-травматические и пост-болезненные душевные переживания и физические страдания пациентов, позволяет данным пациентам быстрее восстановить утраченные функции и вернуться к обыденному образу жизни, а у спортсменов повысить контролируемые физические показатели.
Кроме того, при реализации заявленного тренажера возможно существенное снижение экономических затрат на реабилитацию пациентов с травмами верхних конечностей и заболеваниями за счет их скорейшего выздоровления и возвращения к трудовой деятельности. Использование заявленного тренажера в области спорта способствует повышению спортивных результатов. То есть применение заявленного технического решения способствует существенному повышению качества жизни людей, удовлетворению жизненных потребностей людей.
При этом анализ уровня техники показывает, что конструкция заявленного тренажера является содержащей дополнительные, по сравнению с прототипом, элементы и узлы, существенно расширяющие его (заявленного технического решения) функциональные свойства. Расширенные, по сравнению с прототипом, функциональные свойства заявленного тренажера с биологической обратной связью для реабилитации пальцев и кистей рук существенно расширяют область применения технических средств в области восстановительной (реабилитационной) медицины и спорта и/или спортивной медицины.
Кроме того, заявленное техническое решение обеспечивает, по сравнению с прототипом, выполнение существенно более широкого перечня и разнообразия лечебных и тренировочных упражнений, способствующих восстановлению утраченных и/или недостаточно развитых двигательных навыков и физиологических функций кистей и пальцев рук, причем - с бульшей, по сравнению с прототипом, результативностью реабилитационного процесса.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, так как может быть изготовлено с применением имеющихся в свободном доступе известных инструментов, материалов, комплектующих деталей и узлов, при этом может быть за короткий срок запущено в промышленное производство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| Мышечный интерпретатор | 2023 |
|
RU2826231C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| АССИСТИРУЮЩИЙ РОБОТ-ТРЕНАЖЕР ДЛЯ ПОВРЕЖДЕННОЙ КИСТИ | 2020 |
|
RU2744753C1 |
| Интерактивный тренажер для реабилитации двигательной функции руки после неврологического поражения | 2024 |
|
RU2830420C1 |
| РЕАБИЛИТАЦИОННЫЙ ТРЕНАЖЕР ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИОНАЛЬНОСТИ КИСТЕЙ РУК, ПАЛЬЦЕВ И ЛУЧЕЗАПЯСТНОГО СУСТАВА | 2023 |
|
RU2800306C1 |
| СПОСОБ РЕАБИЛИТАЦИИ | 2021 |
|
RU2770595C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |

Группа изобретений относится к медицинской технике и может быть использована для реабилитации двигательной активности и амплитуды движений суставов кистей и пальцев рук. Тренажер с биологической обратной связью состоит из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, при этом он оснащен шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом. На внешней стороне предплечья больной руки пациента фиксируют модуль управления тренажера, пальцы пациента вставляют в пальцы перчатки и фиксируют пальцы перчатки на подложке фиксации пальцев перчатки, ладонь пациента фиксируют на суппорт-фиксаторе кисти руки, на здоровой руке пациента на среднем и указательном пальцах фиксируют датчики для измерения кожно-гальванической реакции пациента. 2 н.п. ф-лы, 12 ил.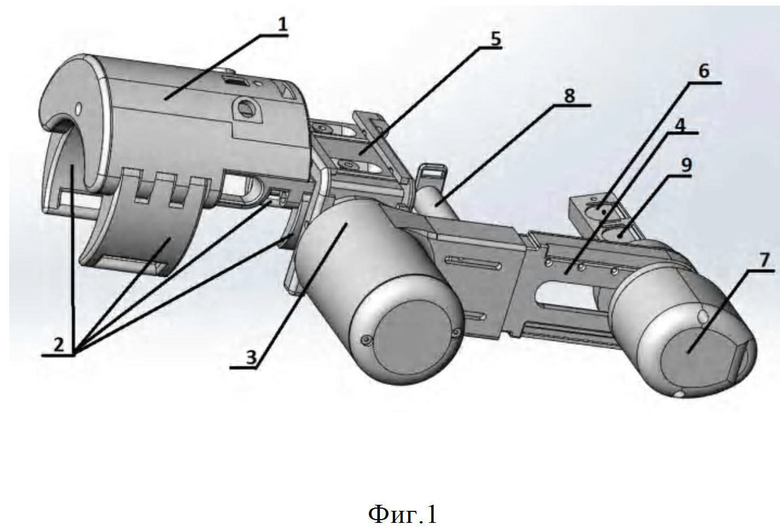
1. Тренажер с биологической обратной связью для реабилитации кистей и пальцев рук, состоящий из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, отличающийся тем, что дополнительно оснащен шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом, Bluetooth-модулем связи с входящим в комплект тренажера компьютером, модулем сенсора кожно-гальванической реакции организма пациента, двух модулей миосенсоров, модуля преобразователя напряжения питания для шагового двигателя, автономными, независимыми от электросети источниками электропитания для питания всех электронных компонент и модулей тренажера, подключаемым в Интернет компьютером с установленным на нём программным обеспечением, модулем двигателя для сгибания/разгибания пальцев кисти руки с содержащим обеспечивающий управляемое принудительное сгибание/разгибание пальцев кисти руки сервопривод, перчаткой для фиксации кисти руки на модуле сгибания пальцев кисти руки, оснащенной расположенными внутри пальцев перчатки датчиками давления пальцев кисти руки.
2. Способ работы тренажера по п. 1, заключающийся в том, что на внешней стороне предплечья больной руки пациента фиксируют модуль управления тренажера с использованием плотно охватывающих снизу предплечье ремней на липучке, пальцы пациента вставляют в пальцы перчатки и фиксируют пальцы перчатки на подложке фиксации пальцев перчатки крепежными винтами, ладонь пациента фиксируют на суппорт-фиксаторе кисти руки с помощью ленты на липучке, на здоровой руке пациента на среднем и указательном пальцах фиксируют датчики для измерения кожно-гальванической реакции пациента, датчики для измерения кожно-гальванической реакции закрепляют в выполненном из эластичной ткани напальчнике, на модуль управления тренажера подают напряжение путем нажатия кнопки включения, далее тренажер под управлением программного обеспечения автоматически устанавливают в стартовое положение – то есть подложку фиксации пальцев устанавливают в крайнее переднее положение, обеспечивая полное выпрямление пальцев кисти пациента, модуль сгибания кисти устанавливают в горизонтальное положение, включают электропитание входящего в состав тренажера компьютера, после чего программное обеспечение автоматически устанавливает связь между модулем управления тренажера и компьютером с использованием беспроводного канала Bluetooth, при наличии возможности использования сети Интернет по Wi-Fi устанавливают соединение с компьютером лечащего врача и проверяют наличие обновления конфигурационного файла для модуля управления тренажера, где прописаны режимы работы тренажера, в случае если файл конфигурации тренажера был обновлен лечащим врачом с целью оптимизации процесса реабилитации, файл конфигурации скачивают и устанавливают через компьютер пациента на тренажер автоматически, на компьютере запускают прилагаемое программное обеспечение, выбирают режим использования тренажера – для кисти или пальцев, конкретный режим для кисти или конкретный режим для пальцев и начинают процесс реабилитации и/или тренировки, снимают с помощью миосенсоров и датчиков кожно-гальванической реакции организма биометрические данные пациента, передают их и записывают в компьютере пациента, далее осуществляет передачу биометрических данных через сеть Интернет по Wi-Fi на компьютер лечащего врача, в случае отсутствия возможности использования сети Интернет в момент проведения сеанса реабилитации данные записывают на компьютер пациента и передают на компьютер лечащего врача при появлении возможности подключиться к сети Интернет.
| WO 2011117901 A1, 29.09.2011 | |||
| 0 |
|
SU175324A1 | |
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛИЗИРОВАННЫХ КРАСИТЕЛЕЙ | 0 |
|
SU174145A1 |

