Изобретение относится к судостроению, в частности к средствам использования энергии морских волн для движения судна.
Из уровня развития техники известны волновые движители в виде погруженных крыльев, принцип действия которых основан на том, что их вертикальное движение от качки судна на волнении при определённых углах атаки формирует силу тяги. Г.Е. Павленко в 1935 г. предложил использовать крыло с переменным углом атаки, автоматически регулируемым пружинными ограничителями [Устройство для использования качки на волнении для передвижения судна, Авт. свид. 47562, МКИ В63Н 19/02]. Большинство разновидностей волновых движителей, предложенных впоследствии разными изобретателями, было основано на этом принципе.
Недостатком таких устройств является малая эффективность движителя. Причиной является то, что вертикальное движение подводных крыльев формируется не непосредственно волнением, а вследствие качки судна. То есть первичным приемником энергии волн служит корпус судна. Для формирования достаточной тяги судно должно интенсивно раскачиваться. Но при этом энергия волн в первую очередь затрачивается на создание качки и связанного с ней дополнительного сопротивления воды движению судна, а крылья играют роль в большей степени не волновых движителей, а стабилизаторов качки, вследствие чего уменьшают дополнительное волновое сопротивление.
Для надводных судов эффективность волновых движителей на основе крыльев с переменным углом атаки повышается при увеличении заглубления крыльев. Это связано с увеличением относительной вертикальной скорости потока, набегающего на крылья. Такой же эффект наблюдается у волновых глайдеров, имеющих надводный корпус, обеспечивающий плавучесть и преобразующих энергию волн в качку, и подводный корпус с крыльевыми волновыми движителями, связанный с надводным корпусом буксирными канатами [Wave Power, Patent № US 7371136 B2]. При заглублении подводных крыльев амплитуды качки надводного корпуса уменьшаются, но растут ускорения, динамические нагрузки и удары волн в корпус судна. Также возможны повреждения подводных крыльев при ударах о дно на малых глубинах.
Способом повышения эффективности волнового движителя является использование энергии не качки судна, а непосредственного орбитального движения воды. В первую очередь это относится к подводным и полуподводным (полупогружным) судам, а также к судам, которые вследствие особой формы корпуса (катамараны, суда с малой площадью ватерлинии) подвержены воздействию волн и качки в гораздо меньшей степени, чем надводные. Такие движители должны располагаться вблизи поверхности воды, где сосредоточена основная энергия морских волн. Примеры движителей, расположенных вблизи поверхности воды, для надводных однокорпусных и многокорпусных судов приведены в обзорной работе В.Н. Глушко [К вопросу использования энергии морского волнения движителями судов. Институт гидромеханики НАНУ. – Киев, 2017].
Недостатками таких волновых движителей для надводных судов является низкая эффективность вследствие того, что они создают дополнительные реактивные силы, увеличивающие качку судна и сопротивление воды. Кроме того, их выступающие и подвижные части недостаточно надёжны при воздействии динамических нагрузок, особенно ударов волн в штормовых условиях плавания.
Наиболее близким к заявляемому решению является изобретение Прокофьева В.В., Филатова Е.В., Чикаренко В.Г. и др. [Судовой волнодвижитель, патент RU 2528449 С2 МПК B63H19/02, 2011 г.], согласно которому волновой движитель представляет собой наклонную пластину, жестко закрепленную определенным образом между корпусами катамарана. Сила тяги судна на встречном волнении образуется за счёт наката волн на пластину, с последующим образованием пропульсивного импульса при падении волн с задней кромки пластины. Достоинством такого устройства является простота конструкции и отсутствие в нём подвижных деталей. Однако имеются и существенные недостатки, а именно: фиксированные длина и угол наклона пластины обеспечивают образование силы тяги в узком диапазоне параметров волнения; импульс тяги образуется только при падении волны с задней кромки пластины, в остальное время встречная волна преимущественно создаёт силу, препятствующую движению вперёд; погруженная передняя часть пластины создаёт большое сопротивление движению. Более того, пластина способствует зарыванию катамарана в волну и увеличению продольной качки судна. В результате эффективность волнового движителя низкая, причём в большом диапазоне курсовых углов, длин и высот волн судно будет дрейфовать только по ходу волн.
Технической проблемой, на решение которой направлено предлагаемое изобретение, является повышение эффективности волнового движителя на различных курсовых углах волнения, в широком диапазоне длин и высот волн, при обеспечении надёжности в условиях штормовых динамических нагрузок.
Решение указанной технической проблемы достигается тем, что устройство для преобразования энергии поверхностных морских волн выполнено в виде поперечных наклонных пластин (крыльев), расположенных вблизи свободной поверхности моря, отличительными особенностями которого является то, что это устройство расположено над корпусом подводного или полуподводного судна с возможностью регулирования глубины погружения (осадки) судна.
Технический результат изобретения состоит в обеспечении эффективного преобразования энергии волн в тягу подводного или полуподводного судна, который достигается тем, что глубина погружения и дифферент судна, следовательно, положение пластин волнового движителя относительно поверхности моря регулируется в зависимости от курсового угла, длины и высоты волн.
Новые существенные признаки позволяют обеспечить эффективное преобразование волновой энергии и формирование силы тяги в условиях широкого спектра параметров волн при различных курсовых углах.
На фигуре 1 изображено подводное судно, а на фигуре 2 – полуподводное судно. Корпус 1 может иметь разную форму в зависимости от назначения судна и волновых режимов в районах эксплуатации. Количество, размеры и углы наклона пластин (крыльев) 2 волнового движителя также могут быть различными и определяются в процессе проектирования судна. Пластины могут быть выполнены в различных вариантах исполнения: 1) неподвижными и жестко соединёнными с корпусом, тем самым обеспечивая наибольшую прочность и надёжность; 2) связанными с корпусом шарнирными соединениями 3 и с регулируемым углом наклона, обеспечивая повышение эффективности движителя (фиг. 3); 3) с эластичными элементами (закрылками) 4, обеспечивающими автоматическое повышение эффективности движителя за счёт гидроупругого эффекта (фиг. 3).
Возможность осуществления технического результата подтверждается результатами численного моделирования. На фигуре 4 представлены кадры процесса движения судна на встречном волнении. На фигуре 5 представлены кадры процесса движения судна на попутном волнении. Цветом обозначены гидродинамические поля скорости по продольной координате Х.
Устройство работает следующим образом.
При движении на встречном волнении (фиг. 4) предусматривается погружение судна 1 таким образом, чтобы пластины располагались под подошвами волн. При этом дополнительное сопротивление от волн на корпус судна значительно снижается по сравнению с надводным положением, так как встречное движение воды сосредоточено в вершинах волн. В подошвах волн происходит движение воды в попутном с судном направлении, при этом оно увлекает с собой судно, воздействуя на пластины волнового движителя. Таким образом, при положении пластины движителя под подошвой волны, пластина создаёт тягу. При положении пластины под вершиной волны происходит небольшое торможение судна, однако сила сопротивления вершины волны существенно меньше силы тяги под подошвой волны, так как скорость встречного потока на уровне пластин меньше. Кроме того, за пластинами развиваются вихри, формирующие дополнительные попутные потоки.
При движении на попутном волнении (фиг. 5) предусматривается всплытие подводного судна 1 таким образом, чтобы пластины 2 выходили на поверхность воды. В этом случае догоняющий судно гребень волны сталкивается с судном и его кормовой пластиной, придавая судну значительный импульс. Затем происходит движение судна по инерции и небольшое торможение встречным потоком под подошвой волны.
Следует отметить, что для повышения эффективности волнового движителя необходимо обеспечить минимальную вертикальную и килевую качку судна. Это достигается подводным положением судна и применением известных успокоителей качки, в частности, горизонтальных рулей.
Эффективность волнового движителя может быть повышена при шарнирном соединении пластин с корпусом судна и применении автоматической системы управления углами наклона пластин таким образом, чтобы при относительном встречном потоке воды они поворачивались в горизонтальное положение, прижимаясь к корпусу и уменьшая сопротивление, а при попутном потоке разворачивались, увеличивая площадь действия попутного давления.
Аналогичным способом увеличивается эффективность при использовании в пластинах эластичных участков, угол отклонения которых автоматически регулируется гидроупругим взаимодействием с волновыми потоками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой движитель многокорпусного судна | 2020 |
|
RU2736552C1 |
| ВОЛНОХОД | 1992 |
|
RU2021948C1 |
| ГИДРОАЭРОДИНАМИЧЕСКОЕ СУДНО "ВЕТРОВОЛНОХОД" | 1992 |
|
RU2048387C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 2000 |
|
RU2183176C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2374121C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2034741C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2375239C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2147543C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |




Изобретение относится к судостроению, а именно к средствам использования энергии морских волн для движения судна. Предлагается волновой движитель подводных и полуподводных судов в виде выступающих наклонных пластин или крыльев. Пластины расположены над корпусом судна вблизи свободной поверхности моря. Глубина погружения судна регулируется в зависимости от направления волнения таким образом, что при встречном волнении пластины расположены под уровнем подошвы волн, а при попутном волнении пластины выступают над поверхностью воды. Достигается повышение эффективности волнового движителя. 2 з.п. ф-лы, 5 ил.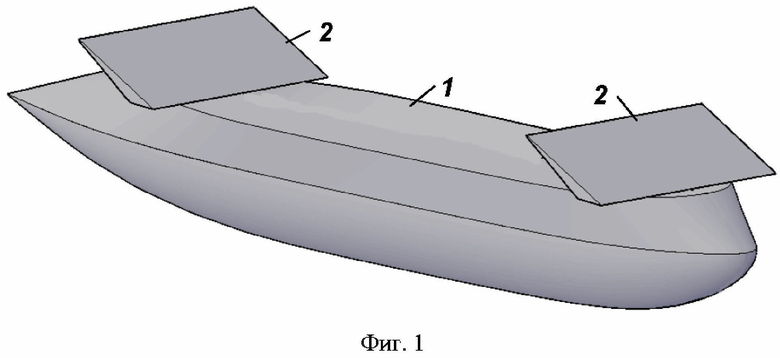
1. Волновой движитель подводных и полуподводных судов в виде выступающих наклонных пластин или крыльев, отличающийся тем, что пластины расположены над корпусом судна вблизи свободной поверхности моря, при этом глубина погружения судна регулируется в зависимости от направления волнения таким образом, что при встречном волнении пластины расположены под уровнем подошвы волн, а при попутном волнении пластины выступают над поверхностью воды.
2. Волновой движитель по п.1, отличающийся тем, что его пластины шарнирно соединены с корпусом судна и имеют систему автоматического регулирования угла наклона.
3. Волновой движитель по п.1 или 2, отличающийся тем, что его пластины имеют эластичные элементы, угол отклонения которых автоматически регулируется гидроупругим взаимодействием с волновыми потоками.
| СУДОВОЙ ВОЛНОДВИЖИТЕЛЬ | 2011 |
|
RU2528449C2 |
| DE 102007062392 A1, 02.07.2009 | |||
| Устройство для абразивной обработки | 1985 |
|
SU1315267A1 |
| Волновой движитель плавсредства | 1990 |
|
SU1799812A1 |
| Волновой движитель многокорпусного судна | 2020 |
|
RU2736552C1 |

