Перекрестная ссылка на родственные заявки
[0001] Данная заявка испрашивает приоритет предварительной патентной заявки США 62/551,417, поданной 29 августа 2017 года.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Устройства согласно изобретению относятся к лучевой терапии и, в частности, к системам и способам для интраоперационной лучевой терапии.
УРОВЕНЬ ТЕХНИКИ
[0003] Онкологическая хирургия может включать в себя удаление злокачественной опухоли и некоторой здоровой ткани, окружающей эту опухоль. Например, секторальная резекция молочной железы (BCS) относится к типу онкологической хирургии, при которой во время операции удаляется злокачественная опухоль и часть окружающей ткани молочной железы (в отличие от всей груди). Эта операция обычно сопровождается лучевой терапией с умеренной дозой, которая предназначена для удаления любых следов злокачественной ткани от ложа опухоли (сосудистой и стромальной ткани, окружающей злокачественную опухоль). Способы радиотерапии могут включать в себя доставляемую извне дозу облучения с использованием способа, известного как дистанционная лучевая терапия (EBRT). Однако обычная EBRT может увеличить риск пропуска целевого объема облучаемых тканей. Для решения этой проблемы иногда используется интраоперационная радиотерапия (IORT). IORT включает в себя применение терапевтических уровней излучения к ложу опухоли, когда область открыта и доступна в течение операции удаления. Преимущество IORT заключается в том, что она позволяет доставлять высокую дозу излучения точно в целевую область с минимальным воздействием на окружающие ткани. IORT также позволяет избежать обычных задержек, связанных со временем между выполнением хирургического удаления злокачественной ткани и EBRT.
[0004] Когда IORT применима, хирург удаляет злокачественную опухоль, после чего онколог-радиолог размещает аппликатор излучения или насадку для терапии внутри пациента в области, где прежде была расположена опухоль. Такая насадка для терапии может генерировать рентгеновские лучи низкой энергии внутри полости опухоли, из которой была удалена злокачественная опухоль.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Система доставки рентгеновского излучения IORT имеет переносной базовый блок. На базовом блоке установлен первый конец роботизированной руки, при этом насадка для рентгеновской терапии расположена на втором конце роботизированной руки, удаленном от первого конца. Насадка для рентгеновской терапии состоит по меньшей мере из одного рентгеновского компонента, выполненного с возможностью генерации терапевтического излучения в диапазоне длин волн рентгеновского излучения. В заданном положении в переносном базовом блоке расположена калибровочная ячейка. Эта калибровочная ячейка состоит из углубления, вовнутрь которой может быть размещена насадка для рентгеновской терапии. Калибровочная ячейка имеет по меньшей мере один проход, через который насадка для рентгеновской терапии может быть вставлена с помощью роботизированной руки для операций калибровки. Калибровочная ячейка имеет множество чувствительных к рентгеновскому излучению элементов (XRSE), расположенных в распределенных положениях вокруг периферии калибровочной ячейки.
[0006] Система доставки рентгеновского излучения IORT также имеет управляющую систему. Эта управляющая система выполнена с возможностью осуществления по меньшей мере одного процесса калибровки, включающего в себя операцию позиционирования, при которой роботизированная рука управляется управляющей системой для вставки насадки для рентгеновской терапии через проход так, чтобы насадка для рентгеновской терапии была расположена в заданном положении калибровки внутри калибровочной ячейки. Управляющая система дополнительно выполнена с возможностью управления рентгеновским компонентом для создания рентгеновского излучения, имеющего диаграмму направленности, в течение времени, когда насадка для рентгеновской терапии расположена в заданном положении калибровки. Управляющая система реагирует на данные измерения, полученные от XRSE, для определения по меньшей мере одной из следующих величин: измеренной интенсивности и измеренной диаграммы направленности рентгеновского излучения, созданного насадкой для рентгеновской терапии в результате рентгеновского излучения.
[0007] Управляющая система сравнивает по меньшей мере одну из следующих величин: измеренную интенсивность и измеренную диаграмму направленности, соответственно, с заданным значением интенсивности и заданной диаграммой направленности. Управляющая система выполнена с возможностью изменения по меньшей мере одного рабочего параметра системы доставки рентгеновского излучения IORT в ответ на сравнение. Согласно одному аспекту рабочий параметр представляет собой продолжительность времени лечения, в течение которого доставляется терапевтическая доза рентгеновского излучения. Согласно другому аспекту рабочий параметр представляет собой управляющий параметр пучка, определяющий структуру или форму диаграммы направленности.
[0008] В других вариантах рабочий параметр может включать в себя управляющий параметр роботизированной руки. Например, такой управляющий параметр может определять неподвижное положение насадки для рентгеновской терапии, используемое при применении терапевтической дозы рентгеновского излучения. Рабочий параметр также может представлять собой управляющий параметр перемещения, определяющий динамическое перемещение роботизированной руки, выполняемое при применении терапевтической дозы рентгеновского излучения. В таком варианте динамическое перемещение может представлять собой перемещение, минимизирующее колебания дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли.
[0009] Данное решение также относится к способу калибровки системы доставки рентгеновского излучения IORT. Этот способ может включать в себя поддержку первого конца роботизированной руки на переносном базовом блоке и поддержку на втором конце роботизированной руки насадки для рентгеновской терапии, при этом насадка для рентгеновской терапии имеет по меньшей мере один рентгеновский компонент, выполненный с возможностью генерации терапевтического излучения в диапазоне длин волн рентгеновского излучения. Управляющая система побуждает роботизированную руку вставить насадку для рентгеновской терапии в калибровочную ячейку, образованную углублением, расположенным в заданном положении в переносном базовом блоке. Затем управляющая система активирует рентгеновский компонент для генерации рентгеновского излучения из насадки для рентгеновской терапии, когда насадка для рентгеновской терапии расположена в заданном положении калибровки в калибровочной ячейке. После этого управляющая система может получать данные датчиков от множества чувствительных к рентгеновскому излучению элементов (XRSE), расположенных в распределенных положениях вокруг периферии калибровочной ячейки. Данные датчиков используются для определения по меньшей мере одной из следующих величин: интенсивности и диаграммы направленности рентгеновского излучения, создаваемого насадкой для рентгеновской терапии.
[0010] В некоторых вариантах управляющая система автоматически сравнивает по меньшей мере одну из следующих величин: измеренную интенсивность и измеренную диаграмму направленности, соответственно, с заданным значением интенсивности и заданной диаграммой направленности. Затем управляющая система может работать так, чтобы автоматически изменять по меньшей мере один рабочий параметр системы доставки рентгеновского излучения IORT в ответ на сравнение. Например, рабочий параметр может включать в себя продолжительность времени лечения, в течение которого доставляется терапевтическая доза рентгеновского излучения. Рабочий параметр также может включать в себя управляющий параметр пучка, определяющий структуру или форму диаграммы направленности.
[0011] В некоторых вариантах рабочий параметр может включать в себя управляющий параметр роботизированной руки, определяющий неподвижное положение насадки для рентгеновской терапии, используемое при применении терапевтической дозы рентгеновского излучения. Альтернативно, рабочий параметр может быть выбран, чтобы содержать управляющий параметр перемещения. Например, управляющий параметр перемещения может определять динамическое перемещение роботизированной руки, выполняемое при применении терапевтической дозы рентгеновского излучения. В некоторых вариантах динамическое перемещение может быть выбрано так, чтобы минимизировать колебания дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Изобретение описано ниже со ссылкой на прилагаемые чертежи, на которых одинаковые номера позиций обозначают одинаковые элементы по всему объему чертежей, и на которых:
[0013] Фиг. 1 - блок-схема, полезная для понимания роботизированной системы IORT.
[0014] Фиг. 2 - схема, полезная для понимания реализации роботизированной IORT с использованием роботизированной руки и насадки для терапии.
[0015] Фиг. 3 - блок-схема, полезная для понимания управляющей системы, которая может быть использована для содействия роботизированной IORT, описанной в данном документе.
[0016] Фиг. 4 - чертеж, полезный для понимания переносной роботизированной системы IORT с калибровочной ячейкой.
[0017] Фиг. 5 - чертеж, полезный для понимания переносной роботизированной системы IORT с калибровочной ячейкой, в которую для калибровки установлена насадка для рентгеновской терапии.
[0018] Фиг. 6 - вид в разрезе, показывающий некоторые признаки калибровочной ячейки рентгеновского излучения.
[0019] На фиг. 7 показана калибровочная ячейка рентгеновского излучения согласно фиг. 6 с вставленной в нее насадкой для рентгеновской терапии.
[0020] На фиг. 8 показана первая иллюстративная диаграмма направленности рентгеновского излучения от насадки для рентгеновской терапии.
[0021] На фиг. 9 показана вторая иллюстративная диаграмма направленности рентгеновского излучения от насадки для рентгеновской терапии.
[0022] На фиг. 10 показана система измерения положения, которая может быть встроена вовнутрь калибровочной ячейки.
[0023] На фиг. 11 показана покрывающая система, которая может быть включена на проходе калибровочной ячейки.
[0024] На фиг. 12 показан тип системы генерации рентгеновского излучения, которая может быть использована с переносной роботизированной системой IORT, раскрытой в данном документе.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0025] Как может быть легко понятно, компоненты систем и способы, описанные в данном документе, могут быть расположены и выполнены в широком разнообразии разных конфигураций. Таким образом, приведенное ниже более подробное описание, представленное на чертежах, не предназначено для ограничения объема настоящего изобретения, но лишь представляет некоторые иллюстративные варианты, полезные для понимания изобретения. Хотя различные аспекты представлены на чертежах, чертежи не обязательно изображены в масштабе, если не указано иное.
[0026] Роботизированная система IORT, раскрытая в данном документе, содержит систему генерации рентгеновского излучения и имеет насадку для рентгеновской терапии, закрепленную на подвижной концевой части роботизированной руки. Энергия рентгеновского излучения испускается или излучается из насадки для терапии, когда система генерации рентгеновского излучения активирована. В некоторых вариантах насадка для рентгеновской терапии может быть расположена на конце наконечника удлиненного корпуса аппликатора, который закреплен на роботизированной руке с помощью базовой части. За счет управления положением одного или более сочленений роботизированной руки, роботизированная рука может удерживать насадку для терапии в фиксированном положении внутри или снаружи пациента для применения рентгеновской терапии. Например, роботизированная рука может управлять положением насадки для рентгеновской терапии для вмешательств, относящихся к IORT. В некоторых вариантах перемещение роботизированной руки может быть синхронизировано с дыхательными движениями пациента, так что насадка для терапии всегда имеет одинаковое относительное положение с тканью, содержащей ложе опухоли. Роботизированная рука поддерживает насадку для рентгеновской терапии и может обеспечивать некоторые или все необходимые служебные каналы для поддержки функций и операций IORT. Например, роботизированная рука может обеспечивать одну или более трубок для жидкости для облегчения доставки солевого раствора в надувной баллон и для слива солевого раствора из баллона.
[0027] Описанная выше система может быть использована с любым источником рентгеновского излучения, известным в настоящее время или известным в будущем, при условии, что насадка для терапии, из которой излучается энергия рентгеновского излучения, может поддерживаться и удерживаться в требуемом положении с помощью роботизированной руки. Например, миниатюрный источник рентгеновского излучения может быть расположен в насадке для терапии, поддерживаемой роботизированной рукой. Однако одно из преимуществ упомянутого устройства заключается в том, что оно облегчает использование системы генерации рентгеновского излучения относительно большого размера для IORT вместо миниатюрного источника рентгеновского излучения. Пример такой системы генерации рентгеновского излучения большего размера раскрыт в патентной заявке США №15/941,547, поданной 30 марта 2018 г., под названием "Three-Dimensional Beam Forming X-ray Source", которая включена во всей полноте в настоящий документ посредством ссылки. Система генерации рентгеновского излучения большего размера может обеспечить все преимущества миниатюрного источника рентгеновского излучения, но без дополнительных затрат, связанных с миниатюрным источником рентгеновского излучения. Функциональный результат для пациента является тем же, что и у миниатюрного рентгеновского источника, расположенного в гибком катетере. Источник рентгеновского излучения в обоих вариантах может перемещаться с перемещением тканей тела. Однако долговечность и более низкая стоимость системы генерации рентгеновского излучения с большим размером значительно уменьшат общую стоимость лечения IORT.
[0028] Система генерации рентгеновского излучения, описанная в данном документе, может также иметь баллон, расположенный над насадкой для терапии, который вставлен вовнутрь полости опухоли. Баллон может быть надут или спущен путем управления потоком солевого раствора во внутреннюю полость баллона. Надувной баллон, расположенный вокруг насадки для рентгеновской терапии, может способствовать обеспечению применения однородной дозы облучения ко всем частям ложа опухоли. Один из аспектов концепции баллона заключается в том, что при правильном надувании он побуждает все ткани, составляющие ложе опухоли, соответствовать приблизительно сферической форме, образованной надутым баллоном. Соответственно, источник излучения, расположенный в средней части баллона, будет приблизительно равноудаленным от всех поверхностей ткани, образующих ложе опухоли. Если насадка для терапии создает приблизительно сферическую или изотропную диаграмму направленности, то результатом будет по существу однородная доза излучения, применяемая ко всем частям ложа опухоли.
[0029] В системе IORT, описанной в данном документе, необходимо тщательно контролировать количество рентгеновского излучения, прикладываемого к различным частям ложа опухоли источником рентгеновского излучения. Однако система генерации рентгеновского излучения, из-за ее конструкции, неисправности и/или снижения функциональных возможностей со временем, может не создавать ожидаемой диаграммы направленности и/или интенсивности рентгеновского излучения. Такой вариант может привести к тому, что разные части ложа опухоли могут получать уровни рентгеновского излучения, которые являются несоответствующими или не предназначенными иным образом.
[0030] Кроме того, недавние разработки с источниками рентгеновского излучения обладают потенциалом для облегчения управления пучком рентгеновского излучения и формирования пучка в полости опухоли. В совокупности эту возможность иногда называют формированием пучка. Например, система генерации рентгеновского излучения с возможностью формирования пучка раскрыта в патентной заявке США №.15/941,547, поданной 30 марта 2018 года, под названием "Three-Dimensional Beam Forming X-ray Source". Хотя такая возможность формирования луча обеспечивает множество преимуществ в варианте IORT, как описано в этом документе, она также создает определенные проблемы при лечении, поскольку специалист по лечению должен быть уверен, что фактически создаваемая формированная форма пучка хорошо определена в течение IORT. В этой связи в настоящее время не существует эффективного способа проверки, что операция управления пучком или формирования пучка была выполнена правильно и/или доставляет требуемое количество рентгеновского излучения в конкретную часть ложа опухоли.
[0031] Соответственно, настоящее решение включает в себя систему для калибровки источника рентгеновского излучения для IORT. Эта система калибровки может гарантировать, что создаваемый рентгеновский пучок сформирован надлежащим образом, чтобы соответствовать плану лечения. Система калибровки также может обеспечивать основу для плана лечения IORT, подлежащего модификации. Например, такие модификации могут включать в себя сравнение формы, направления и интенсивности пучка, измеренные системой калибровки, с рентгеновским пучком, определенным конкретным планом лечения. На основе такого сравнения могут быть внесены корректировки в управляющие параметры формирования пучка так, чтобы фактически создаваемый формированный рентгеновский пучок более точно соответствовал рентгеновскому пучку, указанному в плане лечения. В других вариантах план лечения может быть модифицирован для учета ограничений или изменений в фактически созданном рентгеновском пучке. Например, это может быть достигнуто путем регулировки положения насадки для терапии, ориентации насадки для терапии и продолжительности времени, в течение которого ткань подвергается воздействию рентгеновского пучка.
[0032] В некоторых вариантах отрегулированное или модифицированное положение насадки для терапии может быть неподвижным положением, в котором насадка для терапии не перемещается в течение времени, когда применяется лучевое лечение. Однако роботизированная рука также может способствовать заданному движению или перемещению насадки для терапии в течение сеанса IORT, чтобы гарантировать, что все части ложа опухоли получают заданное количество излучения в соответствии с планом лечения. В некоторых вариантах перемещение может происходить одновременно с применением рентгеновского излучения. В других случаях применение рентгеновского излучения может быть временно прервано, пока роботизированная рука перемещает насадку для терапии. В некоторых вариантах эти способы могут применять, чтобы способствовать минимизации колебаний дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли. Например, такой подход может быть предпочтительным, когда ограничения в отношении управления пучком таковы, что однородность, форма или направление пучка препятствуют достижению требуемого пучка.
[0033] Решение системы IORT может содержать переносной базовый блок или тележку (например, подвижную тележку на роликах), на которой закреплена роботизированная рука. Система генерации рентгеновского излучения может иметь насадку для терапии, закрепленную на первом конце роботизированной руки, удаленном от второго конца роботизированной руки, закрепленного на переносном базовом блоке. Источник питания и блок управления для системы IORT (включая роботизированную руку) могут быть встроены внутрь базового блока.
[0034] Раскрытое в данном документе решение дополнительно включает в себя использование калибровочной ячейки, включенной в виде части базового блока, поддерживающего роботизированную руку. Калибровочная ячейка предпочтительно установлена в или на базовом блоке так, что она имеет фиксированное положение относительно манипулятора. Соответственно, положение ячейки всегда известно управляющему блоку роботизированной руки. Положение ячейки выбирают таким образом, что роботизированная рука, когда она получает команду на это действие, может перемещать насадку для рентгеновской терапии в положение внутри калибровочной ячейки. Внутри калибровочной ячейки расположены множество элементов датчиков рентгеновского излучения (XRSE) для измерения интенсивности и/или диаграммы направленности рентгеновского излучения. Эти датчики могут быть расположены для покрытия внутренних стенок, образующих ячейку. Для этих целей могут быть использованы один или более различных типов датчиков (например, измерения абсолютной интенсивности пучка в зависимости от диаграммы направленности). Внутри ячейки могут быть расположены элементы измерения положения для проверки наличия и/или положения насадки для рентгеновской терапии, когда она была перемещена в положение внутри ячейки.
[0035] Если требуется оценить выход насадки для рентгеновской терапии (например, структуру и/или напряженность поля), управляющий блок управляет роботизированной рукой для перемещения насадки для рентгеновской терапии в заданное положение в ячейке. В целях данного изобретения под насадкой для рентгеновской терапии можно понимать часть системы генерации рентгеновского излучения, от которой фактически исходит рентгеновское излучение для целей терапевтического лечения. Поскольку ячейка установлена в фиксированном положении непосредственно в или на базовом блоке рентгеновской системы, управляющий блок может знать точное положение, в котором должна быть расположена насадка для рентгеновской терапии для целей оценки. Положения сочленений роботизированной руки всегда известны управляющей системе роботизированной руки. Роботизированная рука установлена в фиксированном положении относительно базового блока. Соответственно, точные положения сочленений роботизированной руки, необходимые для позиционирования насадки для терапии внутри ячейки, могут быть известны роботизированной управляющей системе. Таким образом, одно из преимуществ включения калибровочной ячейки в качестве части базового блока системы IORT заключается в том, что обнаруженная сформированная диаграмма направленности может быть известна и регистрирована относительно положения и ориентации роботизированной руки. После удаления насадки для терапии из калибровочной ячейки, относительное положение и ориентация насадки для терапии всегда известны в зависимости от положений сочленений роботизированной руки. Соответственно, точное положение и ориентация диаграммы направленности также могут быть известны. Эта информация может быть полезна для целей обеспечения, что правильные количества рентгеновского излучения направляются к разным положениям внутри полости опухоли при выполнении вмешательства IORT, как описано в данном документе. Обнаруженная диаграмма направленности также может быть использована в качестве основы для настройки управляющих параметров пучка для изменения направления, формы и/или интенсивности пучка. Эти управляющие параметры пучка, естественно, могут варьироваться в соответствии с конкретным типом источника рентгеновского излучения, который используется в конкретном варианте. Обнаруженная диаграмма направленности также может быть использована в качестве основы для модификации плана лечения. Такие модификации могут включать в себя изменение неподвижного положения насадки для терапии внутри полости раны в течение применения лучевой терапии и/или динамическое изменение положения насадки для терапии в течение сеанса IORT. Эти модификации также могут включать в себя изменение ориентации насадки для терапии на протяжении сеанса IORT.
[0036] XRSE, размещенные внутри ячейки, предпочтительно расположены в множестве заданных положений. Например, в некоторых вариантах эти положения могут быть известны в отношении каждой из множества ортогональных осей, образующих систему координат x, y и z. Если требуется выполнять операции калибровки, положением насадки рентгеновской терапии можно управлять посредством роботизированной руки так, чтобы насадка для терапии располагалась точно в начале системы координат. В других вариантах начало системы координат x, y и z может быть определено динамически в соответствии с положением насадки для терапии. В любом варианте множество XRSE может быть выровнено с множеством точек внутри ячейки, образующих сетку, покрывающую внутреннюю часть полости. В некоторых вариантах вся полость может быть покрыта XRSE. Однако данное решение не ограничено в этом отношении, причем в других вариантах только часть всей полости может быть покрыта XRSE. При этом предпочтительно, если достаточное количество XRSE расположено так, чтобы обнаруживать рентгеновское излучение во множестве различных направлений, окружающих насадку для рентгеновской терапии.
[0037] XRSE могут сообщать результат своей сенсорной деятельности в управляющую систему, контролирующую дозу рентгеновского излучения, обнаруживаемую каждым из датчиков. Каждый XRSE может иметь известное положение на поверхности полости, причем это положение может быть известно управляющей системе. Соответственно, управляющая система может определять точную дозу рентгеновского излучения, применяемую в радиальных направлениях, проходящих от насадки для рентгеновской терапии. Путем сравнения относительной интенсивности, измеренной различными XRSE, может быть определена диаграмма направленности, полученная с помощью насадки для рентгеновской терапии. Эти результаты могут быть отображены специалисту по лечению на дисплее компьютера. Таким образом, специалист по лечению может наблюдать любые изменения фактического количества рентгеновского излучения, применяемого источником рентгеновского излучения, относительно ожидаемой диаграммы направленности. Например, это может быть достигнуто путем сравнения измеренной диаграммы направленности с ожидаемой диаграммой направленности.
[0038] В некоторых вариантах измеренная диаграмма направленности рентгеновского излучения может быть использована в качестве основы для управления системой генерации рентгеновского излучения, так что фактическая диаграмма направленности, генерируемая насадкой для терапии, может соответствовать требуемой диаграмме направленности. Например, это может быть достигнуто путем регулировки по меньшей мере одной характеристики или управляющей функции системы генерации рентгеновского излучения для модификации создаваемого рентгеновского пучка. Обнаруженная диаграмма направленности и уровни интенсивности, обнаруженные, когда насадка для терапии находится в калибровочной ячейке, также могут быть использованы специалистом по лечению для способствования позиционированию насадки для рентгеновской терапии. Например, в некоторых вариантах специалист по лечению может отрегулировать положение насадки для терапии, содержащей источник рентгеновского излучения, так, чтобы минимум или максимум диаграммы направленности рентгеновского излучения был направлен в конкретное положение. Альтернативно, насадка для терапии может быть расположена так, чтобы способствовать большей однородности интенсивности рентгеновского излучения в полости опухоли. Это может быть достигнуто путем периодического изменения положения насадки для терапии для учета различных минимумов и максимумов, связанных с пучком. Эти регулировки могут быть выполнены любым подходящим способом, совместимым с работой конкретной используемой системы генерации рентгеновского излучения. Таким образом, предполагается, что регулировки пучка могут быть осуществлены вручную, электромеханически, электронно или посредством повторного позиционирования роботизированной руки.
[0039] Разные аспекты настоящего изобретения описаны ниже в отношении прилагаемых чертежей иллюстративной системы, которая может доставлять обе терапевтические функции IORT через единую платформу, чтобы лучше служить и приносить пользу практикующему врачу и пациенту. Иллюстративная система может включать в себя множество устройств формирования изображения и радиотерапевтическое устройство, которые используются совместно для выполнения IORT согласно настоящему изобретению. В некоторых вариантах система может включать в себя использование роботизированной системы IORT.
[0040] Как объясняется более подробно ниже, роботизированная система IORT может использовать роботизированную руку, чтобы способствовать обеспечению совместимого положения насадки для рентгеновской терапии в течение IORT. Роботизированная рука может способствовать управляемому перемещению насадки для рентгеновской терапии, расположенной внутри пациента, в ответ на вегетативные движения пациента, связанные с дыханием и т.п. Такое управление перемещением может быть облегчено за счет использования датчиков силы, расположенных в роботизированной руке, или посредством координатных маркеров, расположенных на пациенте, для отслеживания таких перемещений. Эти и другие признаки настоящего решения будут очевидны из приведенного ниже описания.
[0041] На фиг. 1 показана высокоуровневая блок-схема роботизированной системы IORT 100, полезная для понимания изобретения. Иллюстративная система 100 может иметь систему генерации рентгеновского излучения, состоящую из радиотерапевтического компонента 102 с рентгеновской трубкой 101. Система также может иметь опциональный ультразвуковой компонент 104 с преобразователем 106, компонент 112 оптической визуализации (OI) с соответствующим устройством 122 захвата изображения (ICD). Система также имеет роботизированную руку 114, опциональный датчик 116 движения пациента и опциональный управляющий компонент 108 для солевого раствора. В некоторых вариантах, описанных в данном документе, управляющий компонент 110 системы направляет роботизированную руку 114 в течение операций IORT. Такое направление в некоторых вариантах может быть основано на изображениях и данных, полученных от одного или более компонента 116 датчика движения пациента, ультразвукового компонента 104, преобразователя 106, компонента 112 OI и ICD 122. Энергия рентгеновского излучения, создаваемая рентгеновской трубкой 101, может быть применена к пациенту с использованием рентгеновского аппликатора или насадки для терапии (не показана на фиг. 1), закрепленной на подвижном конце роботизированной руки.
[0042] Управляющий компонент 108 для солевого раствора может содержать насос и один или более выборочно управляемых клапанов, все из которых находятся под управлением программных и аппаратных элементов, связанных с управляющим компонентом системы. Насос может быть соединен с резервуаром или источником раствора соли. Таким образом, управляющий компонент для солевого раствора может управлять потоком солевого раствора в баллон и из баллона (не показан на фиг. 1), который расположен над насадкой для рентгеновской терапии. Когда необходимо выполнить операции IORT, насадка для терапии (заключенная в баллон) вставляется вовнутрь полости, из которой была удалена злокачественная опухоль. Затем баллон надувается солевым раствором. После надувания рентгеновская трубка 101 и радиотерапевтический компонент 102 используются для подачи излучения на стенки полости, образованной ложем опухоли. В течение применения излучения управляющий компонент для физиологического раствора может контролировать и поддерживать циркуляцию текучей среды и давление внутри баллона. После завершения лечения IORT управляющий компонент 108 для солевого раствора выпускает солевой раствор для спуска баллона, после чего насадка для рентгеновской терапии (вместе с баллоном) извлекается из полости.
[0043] Роботизированная рука 114 предпочтительно выбрана в качестве роботизированной системы, обеспечивающей свободу перемещения вокруг нескольких ортогональных осей (например, до семи осей), и имеет легкие датчики силы и крутящего момента (не показаны на фиг. 1) для обеспечения безопасной работы с людьми без необходимости защитного ограждения. Иллюстративные роботы такого типа коммерчески доступны из различных источников. Например, KUKA Roboter GmbH, Аугсбург, Германия (KUKA) производит линию облегченных роботов, способных к непосредственному взаимодействию человек-робот (HRC), которые подходят для непосредственного взаимодействия человека с роботом. Эти роботы включают в себя модель LBR iiwa и/или модель LBR iisy, изготавливаемые KUKA. Роботы этого типа хорошо подходят для точных операций, описанных в данном документе, поскольку они имеют высококачественные датчики крутящего момента сочленения, включенные во все шесть осей, которые могут обнаруживать малейшие из внешних сил, возникающих в результате контакта с объектами, и могут реагировать путем немедленного уменьшения величины силы и скорости, связанных с перемещениями робота.
[0044] Если используется компонент 116, чувствительный к движению пациента, он может иметь оптические датчики, ультразвуковые датчики, датчики давления, лазерные датчики или датчик любого другого типа, пригодный для мониторинга движения пациента, подвергающегося лечению IORT. Например, такое движение может включать в себя дыхательное движение и/или движение пищеварительной системы, происходящие в течение IORT. Компонент датчика движения пациента может быть отдельным от роботизированной руки 114 и/или может быть встроен вовнутрь роботизированной руки для облегчения такого измерения. В некоторых вариантах данные от ультразвукового компонента 104, преобразователя 106, компонента 112 оптической визуализации и устройства 122 захвата изображения могут быть использованы для регистрации движения пациента, как описано в данном документе. Информация от этих датчиков может быть использована вместо или в сочетании с данными датчиков, полученными от компонента 116 датчика движения пациента.
[0045] В варианте, в котором управляющий компонент 110 системы получает данные датчиков движения пациента, такая информация может быть использована для управления роботизированной рукой 114. Например, в течение операций IORT, как описано в данном документе, перемещением роботизированной руки можно управлять в соответствии с данными измерения движения пациента, чтобы гарантировать, что насадка для рентгеновской терапии перемещается синхронно с естественным перемещением ткани. Такое естественное перемещение ткани может быть связано с дыхательными или другими функциями организма. Таким образом, роботизированная рука может точно поддерживать положение насадки для рентгеновской терапии относительно ложа опухоли, получающего лучевую терапию. Точный контроль за движением и положением насадки для рентгеновской терапии может помочь гарантировать, что все области ложа опухоли получают однородное воздействие приложенного излучения. Для достижения этого результата роботизированная рука может перемещаться вдоль множества осей перемещения (например, до семи осей перемещения), чтобы поддерживать относительное положение насадки для рентгеновской терапии внутри полости, из которой была удалена злокачественная опухоль.
[0046] Радиотерапевтический компонент 102 IORT может состоять из пусковой цепи рентгеновской трубки, высоковольтных источников питания, цепей управления и других компонентов, необходимых для того, чтобы рентгеновская трубка 101 генерировала рентгеновское излучение, как описано в данном документе. В некоторых вариантах части радиотерапевтического компонента 102 IORT могут быть расположены в блоке насадки, закрепленном на подвижном конце роботизированной руки. В некоторых вариантах рентгеновская трубка 101 также может быть расположена на подвижном конце роботизированной руки. Радиотерапевтический компонент 102 может быть выполнен с возможностью содействия лечению ложа опухоли в соответствии со способами лечения IORT, которые известны в настоящее время или будут известны в будущем. В некоторых вариантах рентгеновская трубка 101 предпочтительно выполнена с возможностью содействовать изотропному источнику для рентгеновских фотонных частиц при выполнении IORT ложа опухоли. В других вариантах рентгеновская трубка 101 может быть выполнена с возможностью содействия направленному рентгеновскому пучку.
[0047] В некоторых вариантах рентгеновская трубка предпочтительно может быть выбрана и специально выполнена так, что она имеет относительно небольшой размер, так что она устанавливается внутри полости, из которой была удалена злокачественная опухоль, но при этом она является прочной и достаточно большой, чтобы выдерживать многочисленные сеансы лечения без перегорания или поломки. Может быть использован любой подходящий источник рентгеновского излучения при условии, что он удовлетворяет этим известным требованиям к источнику рентгеновского излучения IORT. Примером коммерчески доступного источника такого типа является электронная система брахитерапии Axxent®, которая может быть приобретена в Xoft, Inc., Сан-Хосе, Калифорния. Другой подходящий источник рентгеновского излучения описан в патентной заявке США №15/941,547, поданной 30 марта 2018 г., под названием "Three-Dimensional Beam Forming X-ray Source", раскрытие которой включено в настоящий документ посредством ссылки.
[0048] Радиотерапевтический компонент 102, который может быть поверхностным радиотерапевтическим компонентом, и рентгеновская трубка 101 могут вместе иметь цепь управления, один или более охлаждающих элементов для рентгеновской трубки, источники питания, один или более генераторов высокого напряжения, один или более сменных аппликаторов и один или более аппаратных таймеров, работающих совместно с программным таймером для резервирования и других целей. Предполагается, что используемая рентгеновская трубка может быть выбрана так, что она оптимизирована для взаимодействия IORT с тканью ложа опухоли и оказывает минимальные эффекты на более глубоких глубинах ткани. Например, для этой цели может быть использован рентгеновский аппарат обычного типа для поверхностной лучевой терапии (SRT). Следует понимать, что рентгеновский аппарат типа SRT создает рентгеновские лучи низкой энергии, которые подходят для этой цели.
[0049] В некоторых вариантах твердотельный компонент 103, чувствительный к рентгеновскому пучку, может контролировать выходной пучок радиотерапевтического компонента 102 и рентгеновской трубки 101, наряду с общей стабильностью и выходом системы. Данный твердотельный компонент 103, чувствительный к рентгеновскому пучку, может иметь один или более XRSE, установленных внутри калибровочной ячейки рентгеновского излучения. Таким образом, производительность системы генерации рентгеновского излучения может быть оценена путем перемещения насадки для терапии вовнутрь калибровочной ячейки. Эти операции калибровки могут выполняться всякий раз, когда система 150 нуждается в тестировании для контроля качества или в целях диагностики всей системы 150. Однако может быть предпочтительным выполнять такие операции калибровки непосредственно перед началом процедуры IORT, так что может быть определена точная и актуальная характеристика для операций рентгеновской трубки 101 и рентгеновского пучка.
[0050] В настоящем изобретении предполагается, что дополнительно или альтернативно использованию лучевой терапии на основе рентгеновского излучения в системе 100, могут быть использованы любые другие типы лучевой терапии в системе 100. Таким образом, компоненты для лучевой терапии могут быть выбраны для поддержки лучевой терапии на основе фотонов (например, рентгеновские лучи и гамма-лучи), лучевой терапии на основе частиц (например, электроны, протоны, нейтроны, ионы углерода, альфа-частицы и бета-частицы) или любых их комбинаций, которые могут быть определены как подходящие для IORT в настоящее время или в будущем.
[0051] Если используется ультразвуковой компонент 104, он может иметь цепь управления, системные драйверы, программное обеспечение для управления работой и преобразователь 104, который может быть высокочастотным ультразвуковым преобразователем, для визуализации ткани ложа опухоли. Этот ультразвуковой компонент 104 обменивается данными с программным обеспечением управляющего компонента 110 системы через шину и системные драйверы. Ультразвуковой компонент 104 и преобразователь 106 расположены в иллюстративной системе 100 для предоставления структурных или анатомических данных, связанных с ложем опухоли, без воздействия на пациента ионизирующим излучением. Однако в настоящем изобретении предполагается, что ультразвуковой компонент 104 и преобразователь 106 могут быть заменены или дополнены в системе 100 компонентами для поддержки технологий формирования изображения любых других типов, которые также не используют ионизирующее излучение. Например, оптическая когерентная томография или дистанционное лазерное сканирование (LIDAR), среди прочего.
[0052] Ультразвуковой компонент 104 может быть любым ультразвуковым устройством, который может работать в приемлемой полосе пропускания. Например, ультразвуковой компонент и преобразователь 106 могут работать в полосе пропускания от приблизительно 2 МГц до приблизительно 70 МГц и могут быть реализованы с помощью электромеханического или твердотельного преобразователя. Система 100 может обеспечивать ультразвуковой компонент 104, по меньшей мере частично встроенный в корпус системы 100, соединенный с шиной данных, с насадкой 106 преобразователя снаружи корпуса, как обсуждалось со ссылкой на фиг. 2 и 3. Ультразвуковой компонент 104 и другие компоненты системы 100 могут сообщаться с шиной данных для содействия передаче данных изображения в управляющий компонент 110 системы и/или устройство 113 отображения. Для этой цели может быть использован подходящий стандарт интерфейса, такой как соединение периферийных компонентов (PCI/PCIe), универсальная последовательная шина (USB/USBII/USBIII/USB-C), Ethernet или Firewire. Однако в настоящем изобретении предполагается, что может быть использован любой другой интерфейс и/или стандарты связи.
[0053] Компонент 112 оптической визуализации может иметь цепь управления, системные драйверы, программное обеспечение управления работой и одно или более устройств 122 захвата изображения для формирования изображения ложа опухоли. Согласно одному аспекту компонент оптической визуализации представляет собой устройство спектроскопической визуализации. Например, компонент оптической визуализации может содержать многоспектральное устройство формирования изображения, которое захватывает данные изображения на множестве оптических частот. Такой многоспектральный компонент формирования изображения может быть выполнен с возможностью использования оптической энергии из видимой части светового спектра для целей формирования изображения, однако он также может использовать оптическую энергию от частот за пределами диапазона видимого света (например, инфракрасного и ближнего ультрафиолетового излучения). Альтернативно компонент оптической визуализации может содержать устройство гиперспектральной визуализации, в котором оптическая информация захватывается по всему электромагнитному спектру в каждом пикселе в захваченном изображении. В качестве дополнительной альтернативы, устройство спектроскопической визуализации может быть выполнено с возможностью спектроскопии комбинационного рассеяния, фиксирующей изменения частоты фотонов в монохроматическом свете, которые являются результатом взаимодействия с тканью внутри ложа опухоли. В качестве дополнительной альтернативы, устройство спектроскопической визуализации может быть выполнено с возможностью фотоакустической визуализации, в которой используются неионизирующие лазерные импульсы или альтернативный источник света для визуализации ткани остаточной полости.
[0054] Компонент 104 оптической визуализации обменивается данными с программным обеспечением управляющего компонента 110 системы через шину и системные драйверы. В настоящем изобретении предполагается, что компонент 112 оптической визуализации и устройство 122 захвата изображения могут быть заменены или дополнены в системе 100 компонентами для поддержки технологий формирования изображения любых других типов для извлечения молекулярной или функциональной информации из тканей ложа опухоли. Например, могут быть использованы биомаркеры для повышения полезности способов оптической визуализации, описанных в данном документе. Как известно, биомаркер может включать в себя вещество, которое вводится в ткань для содействия идентификации состояния заболевания, такого как рак. Согласно одному аспекту, биомаркер может иметь любое вещество, вводимое в ткань ложа опухоли, которое может быть использовано для провоцирования визуально или оптически детектируемых изменений, которые могут содействовать идентификации злокачественных клеток. Любой биомаркер, известный в настоящее время или известный в будущем, может быть использован в сочетании с компонентом 112 оптической визуализации и одним или более устройств 122 захвата изображения, при условии, что он может способствовать идентификации функциональных данных, относящихся к ткани ложа опухоли под наблюдением.
[0055] Компонент 112 оптической визуализации может быть расположен с по меньшей мере частичным встраиванием внутри корпуса системы 100, соединенной с шиной данных, с одним или более устройствами 122 захвата изображений, расположенными снаружи корпуса, как показано на фиг. 2 и 3. Компонент 112 оптической визуализации и другие компоненты системы 100 могут обмениваться данными с шиной данных и соответствующими другими компонентами системы 100 с использованием стандартов интерфейса, таких как соединение периферийных компонентов (PCI/PCIe), универсальная последовательная шина (USB/USBII/USBIII/USB-C), Ethernet или Firewire, среди прочего. Однако в настоящем изобретении предполагается, что может быть использован любой другой интерфейс и/или стандарты связи.
[0056] В некоторых вариантах система 100 использует ультразвуковой компонент 104 с преобразователем 106 для сканирования и визуализации ложа опухоли для получения структурной или анатомической информации о рассматриваемой области. Система также может использовать компонент 112 оптической визуализации с устройством 122 захвата изображения для оптического сканирования и визуализации того же объема для получения функциональной и/или метаболической информации, относящейся к кожной ткани или ее частям. При использовании в данном документе, упоминаемая здесь функциональная и/или метаболическая информация может включать в себя любую информацию, относящуюся к биологической функции, поведению или процессам при работе в данной клетке или группе клеток. Ниже более подробно описываются процессы ультразвукового и оптического сканирования. Процесс регистрации может быть использован для содействия выравниванию данных изображения, полученных с использованием способов ультразвукового и оптического сканирования. После сканирования и отображения интересующей области с помощью системы 100, данные изображения обрабатываются программным обеспечением системы. Данные изображения, полученные с использованием способов ультразвукового и оптического сканирования, могут быть зарегистрированы, а затем слиты или объединены для формирования единого изображения. В слитом изображении данные изображения, полученные с использованием ультразвука, в основном накладываются на данные изображения, полученные с использованием способа оптического сканирования, описанного в данном документе. Результатом является гибридное изображение, включающее в себя подробные анатомические и/или структурные данные для ложа опухоли с наложенными функциональными данными для того же объема ткани. Этот процесс может быть использован после удаления опухоли, чтобы способствовать идентификации любых частей ложа опухоли, которые могут содержать злокачественные ткани.
[0057] Система 100 контролируется и управляется управляющим компонентом 110 системы, который может иметь центральный компьютер с материнской платой, на котором выполняется программное обеспечение для работы и управления с различными параллельными и соединенными платами, которые позволяют ему управлять, обмениваться данными и контролировать различные подкомпоненты и модули системы 100. Этим обеспечивается гармоничная функциональность между тремя основными клиническими компонентами системы 100, включая радиотерапевтический компонент 102, роботизированную руку 114 и компонент, чувствительный к движению пациента. Управляющий компонент 110 системы может быть соединен с возможностью обмена данными с хранилищами данных, включающих в себя хранилище 118 данных пациента и хранилище 120 системных данных.
[0058] Программное обеспечение или инструкции, выполняемые управляющим компонентом системы, могут управлять функциями системы 100, проверять механизмы обеспечения безопасности, а также функции обслуживания и калибровки. Управляющий компонент 110 системы может быть связан с машиночитаемым носителем, который может быть статичной памятью, на которой хранятся один или более наборов инструкций (например, программное обеспечение), реализующих любые один/одну или более способов или функций, описанных в данном документе, в том числе способы, иллюстрированные в данном документе. Эти инструкции также могут находиться, полностью или по меньшей мере частично, в хранилище системных данных, статичной памяти или в процессоре или их комбинации в течение их выполнения системой 100. Хранилище системных данных и хранилище данных пациента и процессор также может представлять собой машиночитаемый носитель.
[0059] Хранилище 118 данных пациента и хранилище 120 системных данных могут быть твердотельным накопителем, жестким диском или другим устройством памяти. Хранилище 118 данных пациента может хранить относящиеся к пациенту данные и параметры лечения, такие как записи пациента, подробности сеанса лечения, документацию и фотографии заболевания. Хранилище 120 системных данных хранит все относящиеся к системе данные и параметры, такие как системный журнал, данные калибровки рентгеновского излучения и результаты диагностики системы. Хранилище 118 данных пациента и хранилище 120 системных данных могут быть отдельными устройствами или объединены физически. Могут использоваться один или более разделов, если хранилища 118 и 120 объединены, например, в виде одного хранилища. Оба хранилища данных могут быть зеркально отражены и сохранены на защищенной и зашифрованной HIPAA-совместимой облачной среде хранения.
[0060] Один пример роботизированной системы 200 IORT показан на фиг. 2. Эта система 200 может иметь базовый блок 201 с разными компонентами, установленными на нем или соединенными с ним. Эти компоненты могут включать в себя роботизированную руку 202, систему генерации рентгеновского излучения, резервуар 212 для солевого раствора, управляющий элемент 214 для солевого раствора и управляющий компонент 210 системы. Система генерации рентгеновского излучения состоит из радиотерапевтического компонента IORT, который в некоторых вариантах может быть распределен между частью 216 базового блока и частью 223 блока насадки. Базовый блок также может иметь компонент 232 оптической визуализации, ультразвуковой компонент 234 и устройство 236 хранения данных для хранения данных пациента и/или системы. Базовый блок 201 предпочтительно представляет собой компактный блок, такой как блок размером 30 на 30 дюймов, и может быть установлен на роликах 211 для простоты маневренности. Базовый блок 201 может иметь вывод питания для опциональной подачи питания ко всем компонентам, размещенным в базовом блоке 201 или соединенным с ним. В этой связи базовый блок 201 может содержать один или более компьютеров 217 для управления системой 200 и/или анализа и обработки данных, полученных от компонентов системы 200. В некоторых вариантах монитор 218 может быть установлен на базовом блоке 201 для обеспечения пользовательского интерфейса. Сходным образом может быть использован терминал или устройство ввода, такое как клавиатура или мышь.
[0061] На базовом блоке 201 может быть расположен держатель 203 для установки роботизированной руки 202 в фиксированном положении на базовом блоке. Роботизированная рука 202 может иметь закрепленную на ней часть 223 блока насадки радиотерапевтического компонента IORT. Удлиненный корпус 228 аппликатора проходит от части 223 блока насадки к насадке 224 для терапии. Роботизированная рука 202 шарнирно соединена с соответствующими роботизированными сочленениями или шарнирными элементами 204 под управлением управляющего компонента 210 системы. Хотя это не показано на фиг. 2, в разных точках роботизированной руки 202 может быть расположено большее или меньшее количество шарнирных элементов 204. Такие шарнирные элементы 204 могут увеличивать или уменьшать количество степеней свободы 225 размещения, ориентации и перемещения насадки 224 для рентгеновской терапии. Кроме того, количество шарнирных элементов показано на фиг. 2 исключительно для простоты иллюстрации. В настоящем изобретении предполагается, что может быть расположено любое количество шарнирных точек так, чтобы обеспечить любое количество степеней свободы в роботизированной руке 202, которое может потребоваться для динамического позиционирования и ориентации насадки 224 для рентгеновской терапии относительно пациента и/или калибровочной ячейки. В некоторых вариантах канал 222 для солевого раствора может способствовать передаче солевого раствора из резервуара 212 и управляющего компонента 214 для солевого раствора в систему генерации рентгеновского излучения. Сходным образом, может быть расположен один или более каналов 220 подачи питания и/или управляющих сигналов. Канал подачи питания и/или управляющих сигналов может способствовать передаче питания и/или управляющих сигналов между частью 216 базового блока и частью 223 блока насадки радиотерапевтического компонента IORT. Эти сигналы могут быть использованы для управления и содействия работе рентгеновской трубки (не показана на фиг. 2). В некоторых вариантах высоковольтные кабели, трубки для текучей среды и управляющие цепи могут быть не включены в виде части роботизированной руки, а содержать отдельный пучок управляющих кабелей, который просто закрепляется на насадке для рентгеновской терапии.
[0062] Описанные в настоящем документе регистрация и отслеживание движения пациента предпочтительно реализуется посредством интеграции физических сенсорных средств, оптических сенсорных средств или обоих. Основной корпус 227, содержащий часть 223 блока насадки, может быть непосредственно установлен на роботизированной руке 202 или закреплен на ней. Соответственно, когда перемещение ткани пациента создает силу, воздействующую на насадку 224 для терапии, такая сила может передаваться через удлиненный корпус 228 аппликатора и основной корпус 227 к роботизированной руке 202. Эта сила может быть результатом непосредственного минимального физического давления, оказываемого на насадку 224 для терапии и связанного через блок 223 насадки с роботизированной рукой. Эти силы могут быть определены соответствующими векторами силы, выровненными с ортогональными осями координат x, y и z. Измерение силы может быть обеспечено физическими датчиками 242, 244, 246, 248, расположенными в любом из нескольких положений на роботизированной руке. Например, в некоторых вариантах физические датчики могут содержать датчики крутящего момента, связанные с каждым из множества сочленений 204 роботизированной руки. Эти физические датчики могут представлять собой комбинацию одного или более разных типов, таких как пьезоэлектрические, гироскопические, твердотельные и другие механизмы и материалы.
[0063] Для содействия отслеживанию движения пациента, на частях тела пациента могут быть размещены один или более координатных маркеров 226. В некоторых вариантах координатные маркеры могут содержать координатные маркеры оптического типа, которые содействуют оптическому отслеживанию положения, связанного с координатным маркером. Перемещение координатных маркеров может контролироваться с помощью датчиков 228. Эти датчики 228 могут быть расположены на части роботизированной руки 202 или на поддерживающей конструкции 230 датчиков, что обеспечивает хорошую обзорность пациента, на котором должна быть выполнена IORT. Датчики 228 могут содержать датчик любого типа, подходящий для мониторинга движения пациента. Например, в случае, когда координатные маркеры относятся к оптическому типу, могут быть использованы способы LIDAR для точного определения положения каждого координатного маркера. Конечно, варианты осуществления не ограничены в этом отношении, при этом может быть использован любой другой подходящий тип координатного маркера и соответствующая система датчиков. Выходы датчиков контролируются управляющим компонентом 210 системы и обрабатываются одним или более компонентами программного обеспечения для анализа движения (программное обеспечение следящей системы).
[0064] В программное обеспечение следящей системы периодически могут подаваться обновленные данные из информации физических датчиков, полученной от физических датчиков 242, 244, 246, 248. При этом в программное обеспечение следящей системы предпочтительно также подается информация положения координатного маркера, генерированная от одного или более датчиков 228. Программное обеспечение следящей системы может использовать полученную информацию для генерации немедленной корректирующей команды обновления координат x, y, z для роботизированной руки, которая отражает незначительное перемещение ткани пациента. Затем роботизированная рука может переместиться к новой синхронизированной координате/положению x, y, z, чтобы соответствовать движению ткани пациента. Этот механизм коррекции движения предпочтительно может работать в постоянном повторяющемся цикле для непрерывного определения и отслеживания движения ткани пациента, создаваемого дыхательными или другими функциями организма.
[0065] На основе анализа сил, приложенных к роботизированной руке, и информации от физических датчиков 242, 244, 246, 248, управляющий компонент 210 системы управляет роботизированной рукой 202, чтобы гарантировать, что насадка 224 для терапии перемещается в точной синхронизации с перемещением пациента. Например, насадка 224 для терапии может подниматься и опускаться при дыхательной активности пациента.
[0066] На фиг. 3 проиллюстрирован пример управляющей системы 300, которая может быть использована для управления роботизированной системой IORT, как описано в данном документе. Управляющая система может включать в себя, но без ограничения этим, машины (или вычислительные устройства) под управлением ОС Windows (например, персональный компьютер или сервер). Такие машины (или вычислительные устройства) хорошо известны в области техники и не описываются подробно в данном документе. Однако следует понимать, что такие машины модифицированы для реализации всех или части способов, описанных в данном документе. Такие модификации могут включать в себя модификации программного обеспечения, модификацию аппаратного обеспечения или их комбинацию.
[0067] Управляющая система 300 может иметь количество компонентов, большее или меньшее показанного на фиг. 3. Однако показанных компонентов достаточно для раскрытия иллюстративного варианта осуществления, реализующего настоящее решение. Аппаратная архитектура на фиг. 3 представляет собой один вариант осуществления типичной управляющей системы или вычислительного устройства, выполненного с возможностью содействия управлению отслеживанием IORT и операциям калибровки источника рентгеновского излучения, описанных в данном документе.
[0068] Некоторые или все компоненты управляющей системы 300 могут быть реализованы в виде аппаратного обеспечения, программного обеспечения и/или комбинации аппаратного обеспечения и программного обеспечения. Аппаратное обеспечение включает в себя, но без ограничения этим, одну или более электронных цепей. Эти электронные цепи могут иметь, но без ограничения этим, пассивные компоненты (например, резисторы и конденсаторы) и/или активные компоненты (например, усилители и/или микропроцессоры). Пассивные и/или активные компоненты могут быть адаптированы, размещены и/или программированы для выполнения одного или более способов, процедур или функций, описанных в данном документе.
[0069] Как показано на фиг. 3, управляющая система 300 содержит пользовательский интерфейс 302, центральный процессор ("CPU") 306, системную шину 310, память 312, соединенную с и доступную для других частей вычислительного устройства 300 через системную шину 310, и аппаратные элементы 314, соединенные с системной шиной 310. Пользовательский интерфейс может включать в себя устройства ввода и устройства вывода, содействующие взаимодействию пользователя с программным обеспечением для управления операциями вычислительного устройства 300. Устройства ввода имеют, но без ограничения этим, физическую и/или сенсорную клавиатуру 350. Устройства ввода могут быть соединены с вычислительным устройством 300 через проводное или беспроводное соединение (например, соединение Bluetooth®). Устройства вывода включают в себя, но без ограничения этим, динамик 352, дисплей 354 и/или светодиоды 356.
[0070] По меньшей мере некоторые из аппаратных элементов 314 выполняют действия, включающие в себя доступ и использование памяти 312, которая может быть оперативным запоминающим устройством ("RAM"), дисководом и/или компакт-диском для однократной записи данных ("CD-ROM"). Аппаратные элементы 314 могут включать в себя блок 316 дисковода, содержащий машиночитаемый носитель 318 данных, на котором хранятся один или более наборов 320 инструкций (например, программный код), конфигурированных для реализации одного или более описанных способов, процедур или функций. Инструкции 320 также могут находиться, полностью или по меньшей мере частично, в памяти 312 и/или в CPU 306 в течение их выполнения вычислительным устройством 300. Память 312 и CPU 306 также могут составлять машиночитаемый носитель. Используемый в данном документе термин "машиночитаемый носитель" относится к одному носителю или множеству носителей (например, централизованная или распределенная база данных и/или соответствующие кэши и серверы), которые хранят один или более наборов 320 инструкций. Используемый в данном документе термин "машиночитаемый носитель" также относится к любому носителю, который может хранить, кодировать или переносить набор инструкций 320 для исполнения управляющей системой 300, побуждающих управляющую систему 300 выполнять любой один или более способов настоящего изобретения.
[0071] В некоторых вариантах аппаратные элементы 314 включают в себя электронную цепь (например, процессор), программированную для содействия управлению роботизированной рукой. В этой связи следует понимать, что электронная цепь может осуществлять доступ к и исполнять приложение (приложения) 324, установленное на вычислительном устройстве 300.
[0072] Фиг. 4, 5 являются чертежами, полезными для понимания того, как калибровочная ячейка 508 может быть интегрирована в роботизированную рентгеновскую систему IORT 500 или на ней. Роботизированная рентгеновская система 500 IORT сходна с роботизированными рентгеновскими системами IORT, описанными на фиг. 1-3. Рентгеновская система IORT 500 имеет базовый блок 501, на котором установлена роботизированная рука 502. Роботизированная рука имеет множество сочленений 504. Система также имеет радиотерапевтический компонент IORT, который состоит из части 523 блока насадки. Часть блока насадки состоит из основного корпуса 527, удлиненного корпуса 528 аппликатора и насадки 524 для терапии. Как показано на фиг. 4 и 5, рентгеновская система 500 дополнительно имеет калибровочную ячейку 508. В некоторых вариантах калибровочная ячейка 508 может проходить в направлении, выровненном с вертикальной осью 516. Однако направление выравнивания калибровочной ячейки 508 не является критическим. Соответственно, калибровочная ячейка 508 также может быть выровнена с осью, проходящей в другом направлении, причем любое такое альтернативное направление выравнивания рассматривается как приемлемый вариант при условии, что положение доступно для роботизированной руки.
[0073] Положение калибровочной ячейки 508 и оси 516 выравнивания выбраны так, что насадка 524 для рентгеновской терапии может быть автоматически вставлена вовнутрь калибровочной ячейки 508 с помощью роботизированной руки 502. Таким образом, калибровочная ячейка 508 предпочтительно может иметь проход 510, обеспечивающий доступ к внутренней части калибровочной ячейки. Проход 510 может быть расположен на верхней поверхности 511 базового блока 501, как показано, или в боковой стенке 514 базового блока 501. На фиг. 4 показана роботизированная рука с множеством сочленений 504, отрегулированных таким образом, что насадка 524 для рентгеновской терапии готова для вставки вовнутрь полости для лечения пациента (не показан), проходящего лечение IORT. На фиг. 5 показана роботизированная рука 502 с множеством сочленений 504, отрегулированных так, что насадка 524 для терапии вставлена вовнутрь калибровочной ячейки 508 для определенных операций калибровки.
[0074] На фиг. 6 показан вид в разрезе калибровочной ячейки 508, взятый по линии 6-6 на фиг. 4. Калибровочная ячейка 508 выполнена из конструкции 600 полости ячейки, которая образует внутреннюю часть калибровочной ячейки. В некоторых вариантах внутренняя часть калибровочной ячейки может иметь трубчатую конфигурацию, выполненную из одной или более боковых стенок 610, проходящих в направлении, параллельном оси 516, от прохода 510 к противоположной нижней стенке 612. Профиль поперечного сечения калибровочной ячейки может зависеть от количества боковых стенок 610, используемых для выполнения калибровочной ячейки. Например, в некоторых вариантах шесть боковых стенок могут использоваться для выполнения конструкции полости ячейки, так что калибровочная ячейка может иметь профиль с гексагональным поперечным сечением. Точное количество боковых стенок не критично. Может быть использовано большее или меньшее количество боковых стенок, так что профиль поперечного сечения калибровочной ячейки может образовывать правильный многоугольник, такой как треугольник, квадрат, пятиугольник, шестиугольник или восьмиугольник. В других вариантах профиль поперечного сечения калибровочной ячейки может быть по существу круглым, так что ячейка имеет приблизительно цилиндрическую форму. Нижняя стенка 612 может закрывать конец калибровочной ячейки, противоположный проходу 510.
[0075] Калибровочная ячейка 508 может содержать множество XRSE, расположенных на внутренних поверхностях, образующих конструкцию полости ячейки. XRSE могут иметь различные типы датчиков, выбранных для измерения интенсивности рентгеновского пучка и/или диаграммы направленности рентгеновского излучения, создаваемых насадкой 524 для рентгеновской терапии. Например, в некоторых вариантах XRSE могут содержать множество матриц 602 термолюминесцентных дозиметров (TLD), которые распределены вокруг внутренней части калибровочной ячейки. В некоторых вариантах множество матриц TLD могут быть расположены на множестве печатных плат (PWB) 604. TLD являются предпочтительными для таких приложений, поскольку они имеют небольшие размеры и относительно недороги, поэтому многие сенсорные элементы TLD могут подвергаться радиоактивному излучению при однократном воздействии.
[0076] Матрицы 602 TLD хорошо известны в области техники и поэтому не описываются в данном документе подробно. Однако следует понимать, что каждая матрица 602 TLD состоит из множества чувствительных элементов 606 TLD, расположенных в виде сетки или матрицы. Чувствительные элементы 606 TLD измеряют воздействие ионизирующего излучения. Чувствительные элементы TLD производят или испускают световую энергию (например, видимый свет) из кристалла в детекторе, когда кристалл нагревается. Интенсивность оптического излучения зависит от воздействия рентгеновского излучения. Каждый чувствительный элемент может иметь фотодетектор 610, который измеряет интенсивность оптического излучения от чувствительного элемента. В некоторых вариантах эти фотодетекторы могут быть электрически соединены с печатными платами 604, так что измеренные данные датчиков могут быть буферизованы и переданы в компьютерный процессор (например, управляющий компонент 110 системы IORT).
[0077] Выходные данные от всех фотодетекторов могут быть анализированы для получения мгновенного измерения интенсивности рентгеновского луча в каждом направлении относительно исходной точки, образованной насадкой 524 для рентгеновской терапии. Следует отметить, что наличие чувствительных элементов на нижней стенке 612 может содействовать измерению пучка в направлениях, которые являются осевыми относительно рентгеновского аппликатора (т.е. выровнены с осью 516). Информация от всех XRSE может быть использована для моделирования относительной формы или диаграммы направленности рентгеновского пучка, создаваемого насадкой 524 для терапии, которая была расположена в калибровочной ячейке 508, как показано на фиг. 7. Например, на фиг. 8 и 9 показаны две разные диаграммы 802, 902 направленности, полученные с помощью насадки 524 для терапии. Форма диаграммы и абсолютная интенсивность или энергия каждой диаграммы могут быть измерены с использованием калибровочной ячейки.
[0078] Как известно, TLD не идеальны для абсолютных измерений энергии. Для содействия абсолютным измерениям энергии рентгеновского излучения, испускаемой рентгеновским аппликатором, могут быть использованы дополнительные элементы XRSE, такие как ионизационные камеры 608. Ионизационная камера измеряет заряд по количеству ионных пар, создаваемых внутри газа и вызванных падающим излучением. При воздействии рентгеновского излучения ионизационный ток может течь между двумя электродами, причем величина этого ионизационного тока может быть преобразована в данные датчиков. Ионизационные камеры являются очень надежными и точными измерительными приборами. Соответственно, они могут быть эффективно использованы для калибровки пучка. Величина ионизационного тока в ионизационной камере может быть определена с помощью цепи измерения тока, связанной с печатными платами 604. Эта величина тока может быть преобразована в цифровые данные и затем передана в компьютерный процессор (например, управляющий компонент 110 системы IORT). Другие типы XRSE могут быть использованы вместо или в дополнение к описанным выше TLD и/или датчикам ионизационной камеры. Например, в некоторых вариантах также могут быть использованы системы измерения рентгеновского излучения на основе диодов. Фактически, любой тип XRSE, известный в настоящее время или известный в будущем, может быть использован в калибровочной ячейке для измерения энергии рентгеновского излучения, испускаемой насадкой для терапии.
[0079] Информация о рентгеновском излучении, измеряемая с помощью XRSE, передается обратно в управляющий компонент системы IORT, использующий собранные данные для генерации модели рентгеновского излучения. Таким образом, полученные направление, форма и интенсивность пучка рентгеновского излучения в каждой конфигурации системы могут быть моделированы с помощью управляющей системы непосредственно перед использованием системы для вмешательства IORT. На основе этой модели управляющая система может побудить систему генерации рентгеновского излучения выборочно модифицировать операции роботизированной системы IORT. Например, управляющий компонент может выборочно управлять системой генерации рентгеновского излучения так, что она побуждается генерировать энергию рентгеновского излучения при разных уровнях интенсивности и/или в разных конфигурациях пучка. В других вариантах информация может быть использована в качестве основы для управления роботизированной рукой.
[0080] На фиг. 10 показана внутренняя часть калибровочной ячейки с некоторыми компонентами, опущенными для большей ясности. Внутренняя часть калибровочной ячейки может дополнительно содержать систему датчиков, выполненную с возможностью определения положения насадки 524 для рентгеновской терапии, когда она находится внутри калибровочной ячейки. Например, датчики могут состоять из линейной матрицы оптических излучателей 1002 и противоположной линейной матрицы оптических приемников 1004. Когда насадка 524 для рентгеновской терапии не находится в калибровочной ячейке, каждый оптический приемник 1004 может принимать оптический сигнал 1006 от соответствующего элемента 1002 излучателя. Однако когда насадка для рентгеновской терапии присутствует, оптический сигнал 1008 от оптического излучателя 1002 блокируется, таким образом, оптический сигнал не принимается на оптическом приемнике 1004. Соответственно, путем обнаружения, какие оптические приемники принимают оптический сигнал и какие оптические приемники не принимают оптический сигнал, может быть обнаружена глубина насадки 524 для рентгеновской терапии внутри ячейки. Такая конфигурация может служить для проверки наличия насадки для рентгеновской терапии в ячейке перед началом излучения рентгеновского излучения. Она также может служить средством проверки, что насадка для рентгеновской терапии соответствует положению, понимаемому роботизированной управляющей системой. Таким образом, конфигурация оптических излучателей/приемников может служить в качестве проверки системы для проверки эксплуатационной целостности роботизированной управляющей системы, перед началом операций IORT. Сходным образом, путем тщательного выбора положений оптических излучателей и оптических приемников, оптическая матрица может быть дополнительно оптимизирована для содействия определению, что насадка 524 для терапии расположена надлежащим образом в калибровочной ячейке.
[0081] Конечно, описанная оптическая система представляет собой один из возможных примеров чувствительной системы для обнаружения положения рентгеновского аппликатора внутри калибровочной ячейки. Широкое разнообразие других систем позиционирования хорошо известно в области техники и может быть использовано для сходного эффекта. Предполагается, что все такие системы, известные в настоящее время или известные в будущем, могут быть использованы в настоящем изобретении.
[0082] Проход калибровочной ячейки может быть полностью открытым, как показано на фиг. 6 и 7. Однако по соображениям безопасности в некоторых вариантах может быть предпочтительным использовать покрывающую систему, которая может частично или полностью закрывать проход. Такая покрывающая система может полностью закрывать проход 510, когда калибровочная ячейка не используется, при этом она может быть полностью или частично открыта в течение выполнения операций калибровки. В качестве примера на фиг. 11 показан вид сверху крышки 1100, если смотреть изнутри калибровочной ячейки 508. Крышка 1100 может содержать проход 1106, закрытый множеством гибких эластомерных клапанов 1108. Рентгеновский аппликатор может быть вставлен вовнутрь калибровочной ячейки путем нажатия на эластомерные клапаны, что вызывает, таким образом, их изгиб и позволяет рентгеновскому аппликатору войти в калибровочную ячейку. Вокруг периферии прохода 1106 может быть расположено множество элементов XRSE. Эти XRSE могут содержать одну или более матриц TLD 1102, ионизационных камер 1110 и/или чувствительных элементов любого другого подходящего типа.
[0083] На фиг. 12 показан альтернативный тип источника 1200 рентгеновского излучения IORT, который может быть использован с роботизированной системой IORT, описанной в данном документе. Этот тип источника рентгеновского излучения описан в патентной заявке США №15/941,547, поданной 30 марта 2018 г., под названием "Three-Dimensional Beam Forming X-ray Source", раскрытие которой включено в настоящий документ посредством ссылки. Вкратце, эта система содержит электронно-лучевую пушку (EBG) 1202 и дрейфовую трубку 1204, поддерживаемую на конце роботизированной руки, удаленном от основания. Элемент 1222 генерации рентгеновского излучения IORT расположен на конце дрейфовой трубки 1204, удаленном от EBG. В некоторых вариантах EBG 1202 может находиться в части 223, 523 блока насадки радиотерапевтического компонента IORT, как описано на фиг. 1-5. Например, EBG может находиться в основном корпусе 227, 527 блока насадки, закрепленном на роботизированной руке 202, 502. В таком варианте удлиненный корпус 228, 528 аппликатора может состоять из дрейфовой трубки 1204. Дополнительно насадка 224, 524 для терапии может состоять из элемента IORT 1222 генерации рентгеновского излучения.
[0084] Дрейфовая трубка 1204 выполнена из проводящего материала, такого как нержавеющая сталь. Альтернативно, дрейфовая трубка может быть выполнена из керамического материала, такого как оксид алюминия или нитрид алюминия, с проводящей внутренней облицовкой. Полая внутренняя часть дрейфовой трубки поддерживается под вакуумным давлением (например, подходящее вакуумное давление для целей вариантов осуществления, описанных в данном документе, может находиться в диапазоне ниже приблизительно 10-5 торр или, в частности, приблизительно от 10-9 Торр до 10-7 Торр).
[0085] В источнике рентгеновского излучения, показанном на фиг. 12, электроны e, составляющие электронный пучок, ускоряются с помощью EBG по направлению к рентгеновской мишени 1218. Эти электроны могут иметь значительный импульс, когда они достигают входной апертуры дрейфовой трубки. Полая внутренняя часть дрейфовой трубки поддерживается под вакуумным давлением, при этом по меньшей мере внутренняя облицовка трубки поддерживается при нулевом потенциале. Соответственно, импульс, передаваемый электронам с помощью EBG 1202, может продолжать баллистически переносить электроны по длине дрейфовой трубки с очень высокой скоростью (например, скоростью, приближающейся к скорости света) по направлению к рентгеновской мишени 1218. Следует понимать, что, когда электроны движутся вдоль длины дрейфовой трубки 1204, они больше не подвергаются электростатическому ускорению. Когда электроны соударяются с рентгеновской мишенью 1218, генерируются рентгеновские лучи. Детали управления и формирования пучка выходят за рамки этого изобретения. Однако следует отметить, что направление и форма рентгеновского пучка могут быть формированы или изменены путем использования электромагнитных управляющих катушек 1205, чтобы изменять, с какой частью рентгеновской мишени 1218 соударяются электроны, составляющие электронный пучок. Этот процесс управления может быть обеспечен верхним элементом 1219, расположенным смежно с рентгеновской мишенью 1218.
[0086] Рентгеновская мишень 1218 состоит из дискообразного элемента, расположенного поперек направления перемещения электронного пучка. Например, этот дискообразный элемент может быть расположен в плоскости, приблизительно перпендикулярной направлению перемещения электронного пучка. В некоторых вариантах осуществления рентгеновская мишень 1218 может заключать концевую часть дрейфовой трубки, удаленную от EBG 1202, чтобы способствовать поддержанию вакуумного давления внутри дрейфовой трубки. Рентгеновская мишень 1218 может быть практически любым материалом, однако предпочтительно она выполнена из материала, такого как молибден, золото или вольфрам, который имеет высокое атомное число, чтобы способствовать получению рентгеновского излучения с относительно высокой эффективностью при бомбардировке электронами.
[0087] Промежуточное пространство между элементом 1222 генерации рентгеновского излучения и полостью раны, образованное стенкой 1230 ткани, может быть заполнено солевой текучей средой 1226, расположенной внутри камеры 1224 для текучей среды. Камера для текучей среды может быть упругим элементом в виде баллона, который надувается текучей средой 1226 для заполнения промежуточного пространства 1228 между источником рентгеновского излучения и стенкой 1230 ткани (например, стенкой ткани, содержащей ложе опухоли). Трубки 1210, 1212 для текучей среды, расположенные в или на роботизированной руке, могут содействовать потоку текучей среды к и из внутренней части камеры для текучей среды. Такая конфигурация может помочь повысить равномерность облучения ложа опухоли путем размещения всей стенки ткани на одинаковом расстоянии от источника рентгеновского излучения, чтобы способствовать более последовательному облучению рентгеновским излучением. Генерация рентгеновского излучения на рентгеновской мишени 1218 может генерировать значительное количество тепла. Таким образом, в дополнение к текучей среде 1226, заполняющей промежуточное пространство, в насадку для терапии может подаваться отдельный поток охлаждающей среды через каналы 1206 для охлаждающей среды.
[0088] Различные компоненты, содержащие источник 1200 рентгеновского излучения (например, EBG 1202, дрейфовая трубка 1204 и насадка 1222 для терапии), могут быть установлены на роботизированной руке, как показано на фиг. 4 и 5. Положение источника рентгеновского излучения может контролироваться роботизированной рукой, так что перемещение источника рентгеновского излучения координируется с естественным движением тела (например, дыхательное перемещение) пациента, проходящего лечение.
[0089] Хотя изобретение показано и описано выше в отношении одного или более варианта осуществления, специалисты в области техники могут внести эквивалентные изменения и модификации после прочтения и понимания этого описания и прилагаемых чертежей. Дополнительно, хотя частный признак изобретения, возможно, был раскрыт только в отношении одного из нескольких вариантов, такой признак может быть объединен с одним или более других признаков других вариантов, как это может быть желательно и предпочтительно для любого данного или конкретного применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
| СИСТЕМА И СПОСОБ ГИБРИДНОЙ ПОВЕРХНОСТНОЙ РАДИОТЕРАПИИ С УЛЬТРАЗВУКОВЫМ КОНТРОЛЕМ | 2013 |
|
RU2633322C2 |
| СИСТЕМА НЕЙТРОНОЗАХВАТНОЙ ТЕРАПИИ | 2022 |
|
RU2826774C2 |
| МОДУЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ПАЦИЕНТА | 2004 |
|
RU2360716C2 |
| ВЫРАВНИВАНИЕ СИСТЕМ КООРДИНАТ ВНЕШНЕЙ ЛУЧЕВОЙ РАДИОТЕРАПИИ И СИСТЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2014 |
|
RU2677049C2 |
| ЛУЧЕВАЯ ТЕРАПИЯ С АДАПТИВНЫМ РАСЧЕТОМ ДОЗЫ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2013 |
|
RU2648226C2 |
| СИСТЕМА ДЛЯ ЛЕЧЕНИЯ, СПОСОБ КАЛИБРОВКИ И НОСИТЕЛЬ ИНФОРМАЦИИ | 2019 |
|
RU2766050C1 |
| УСТРОЙСТВО ГЕНЕРАЦИИ МАГНИТНОГО ПОЛЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2021 |
|
RU2807304C1 |
| ДОЗИМЕТР, ТЕРАПЕВТИЧЕСКИЙ АППАРАТ И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ ДЛЯ ИЗМЕРЕНИЯ ДОЗЫ ОБЛУЧЕНИЯ СУБЪЕКТА ВО ВРЕМЯ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2594431C2 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
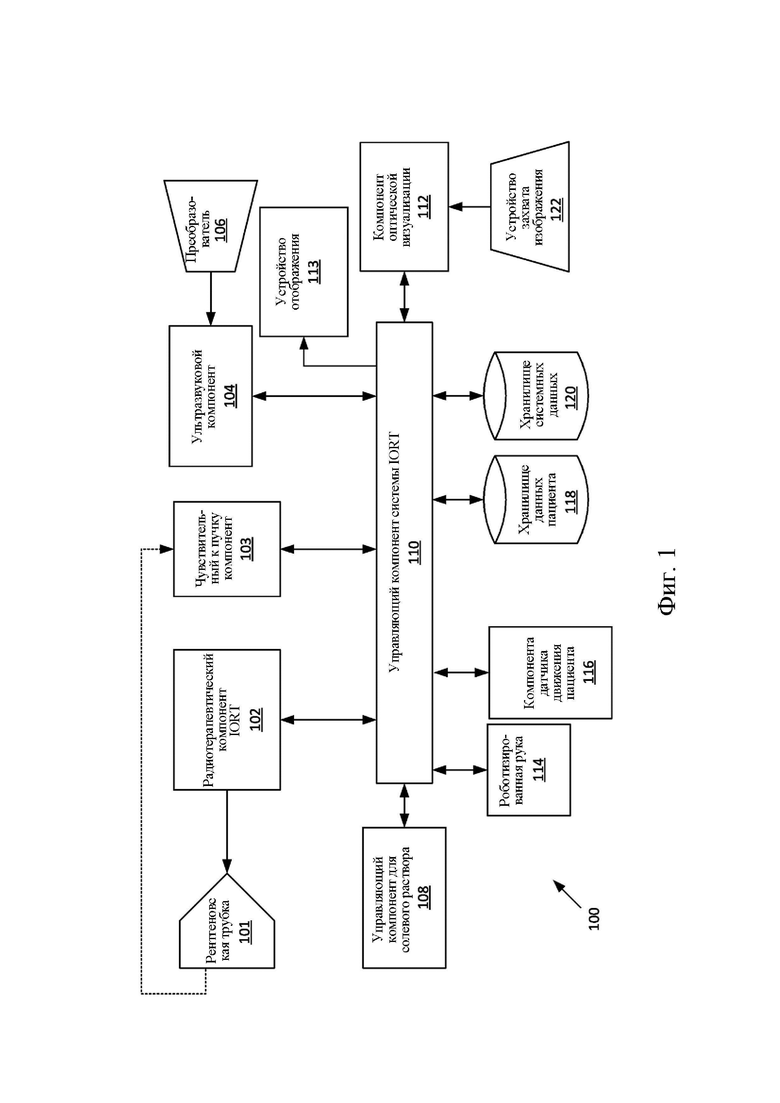
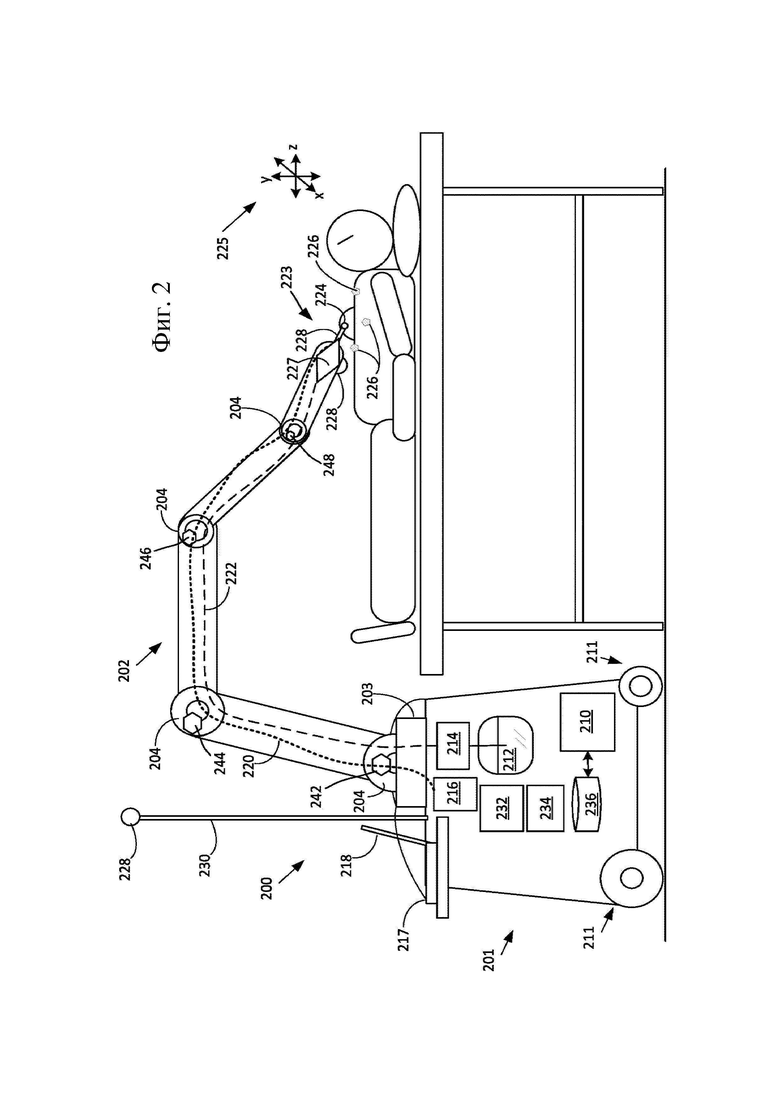
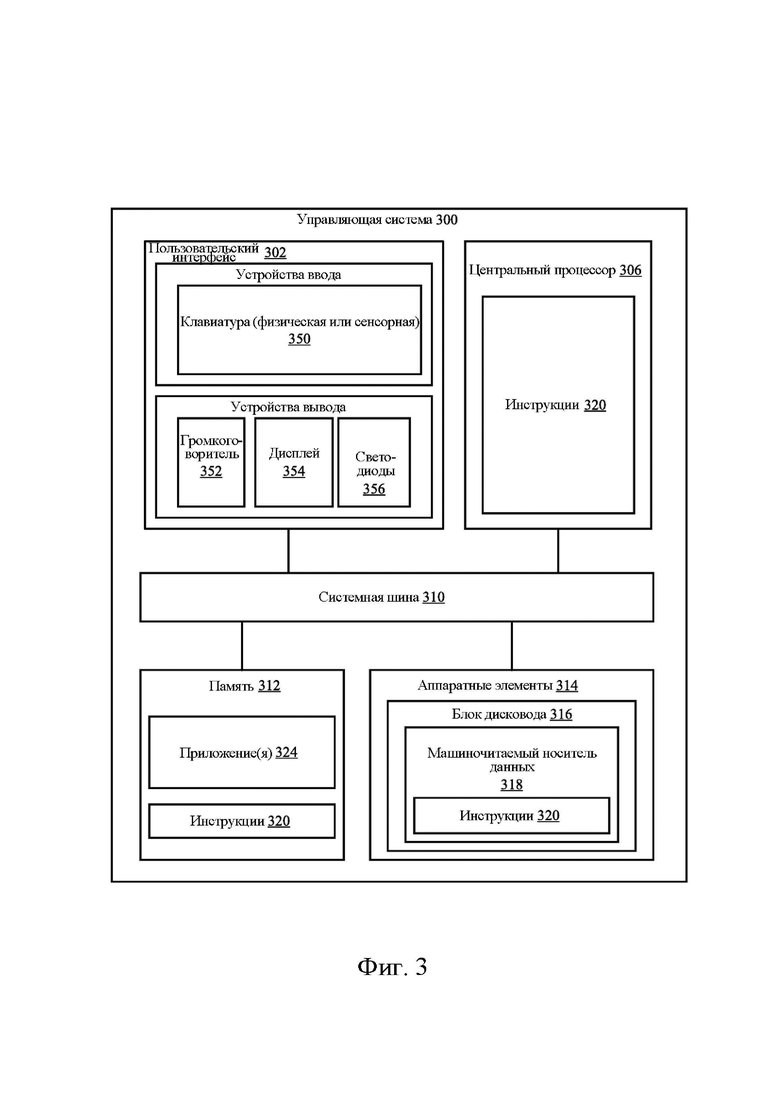
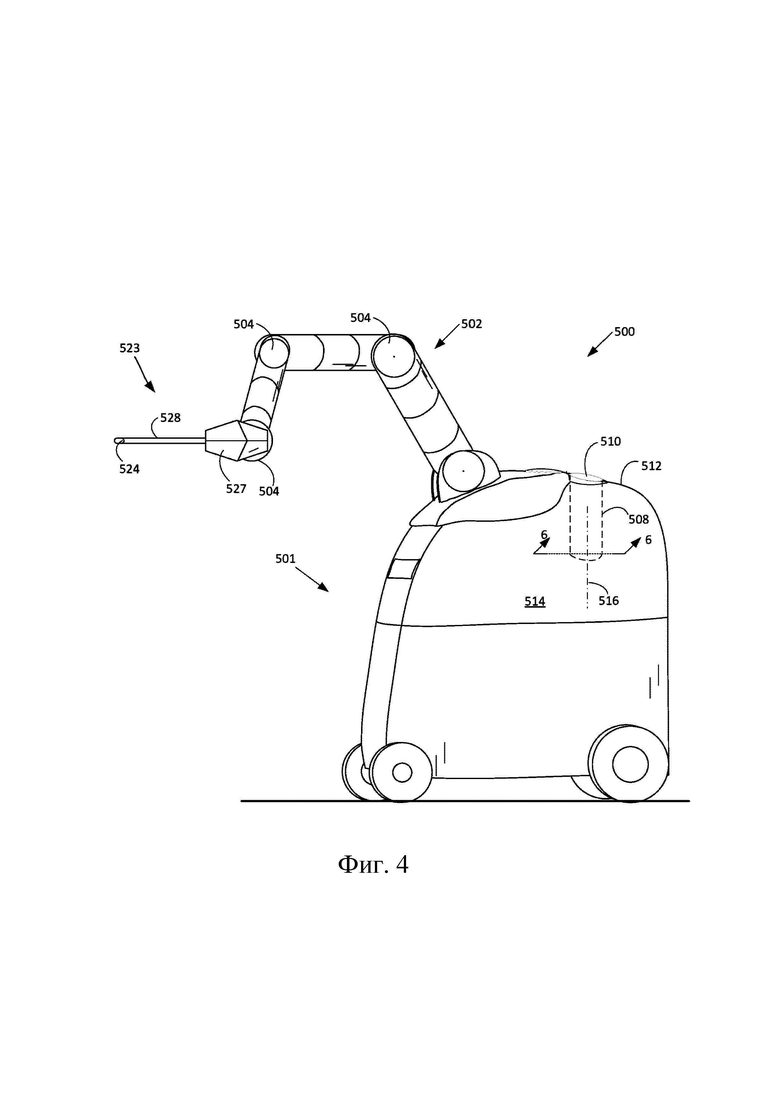
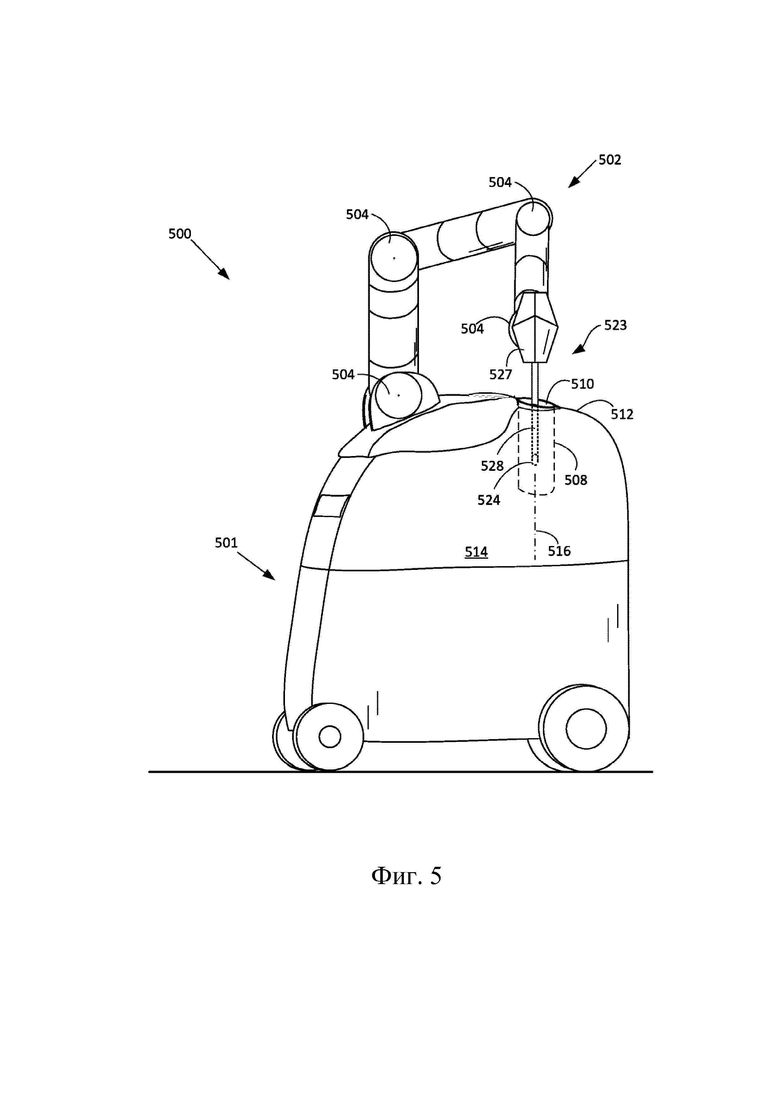
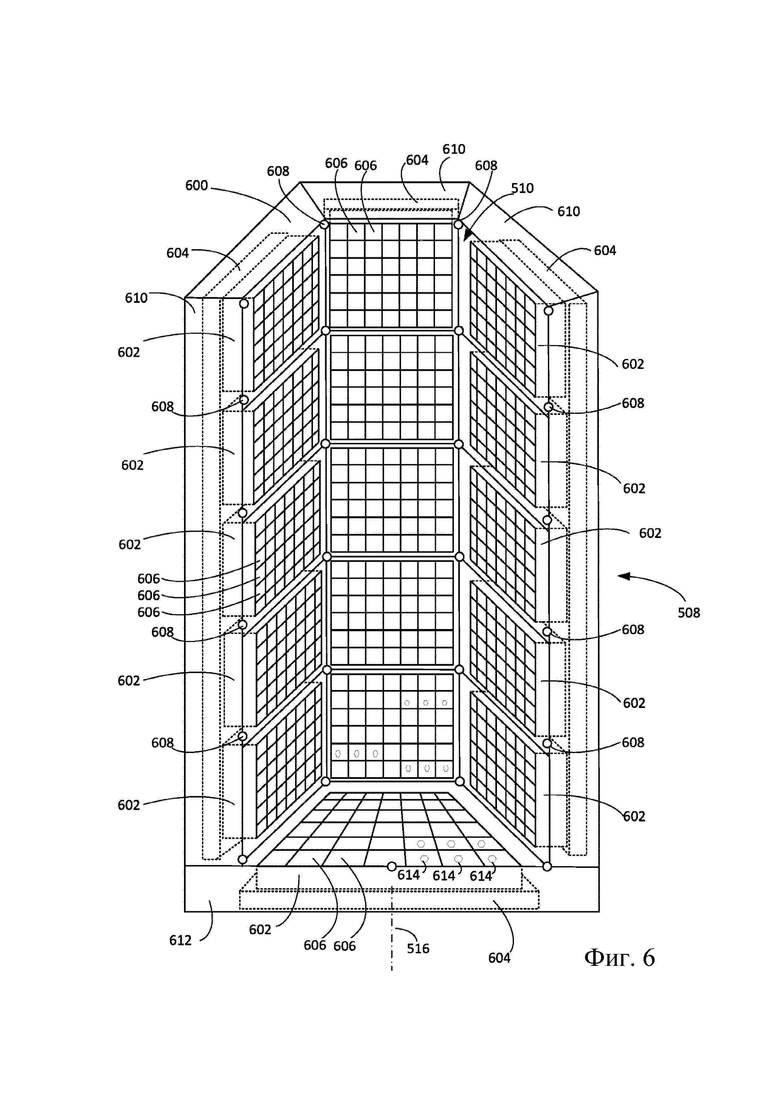
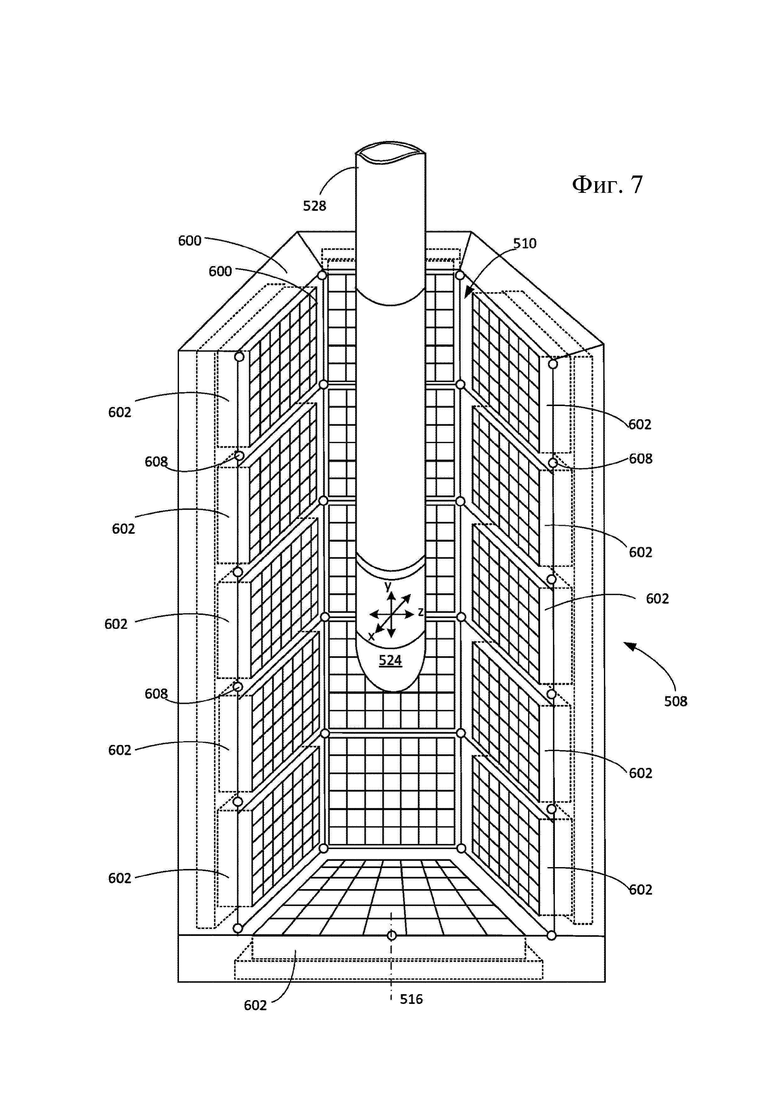
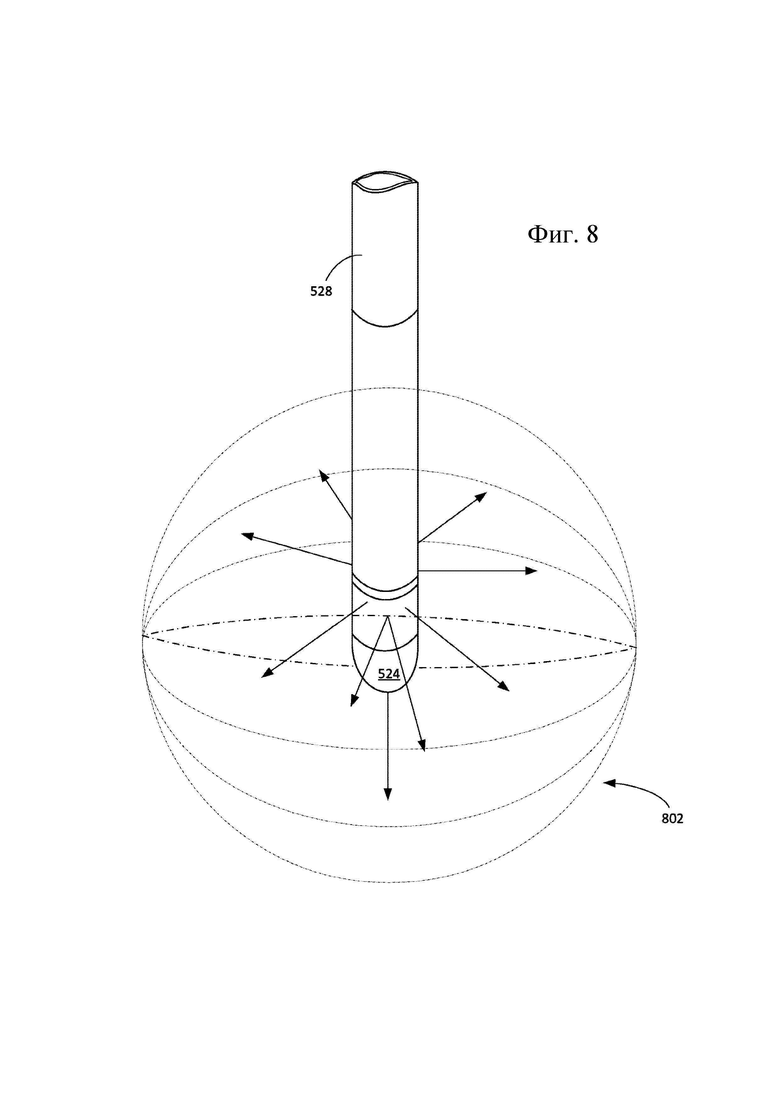
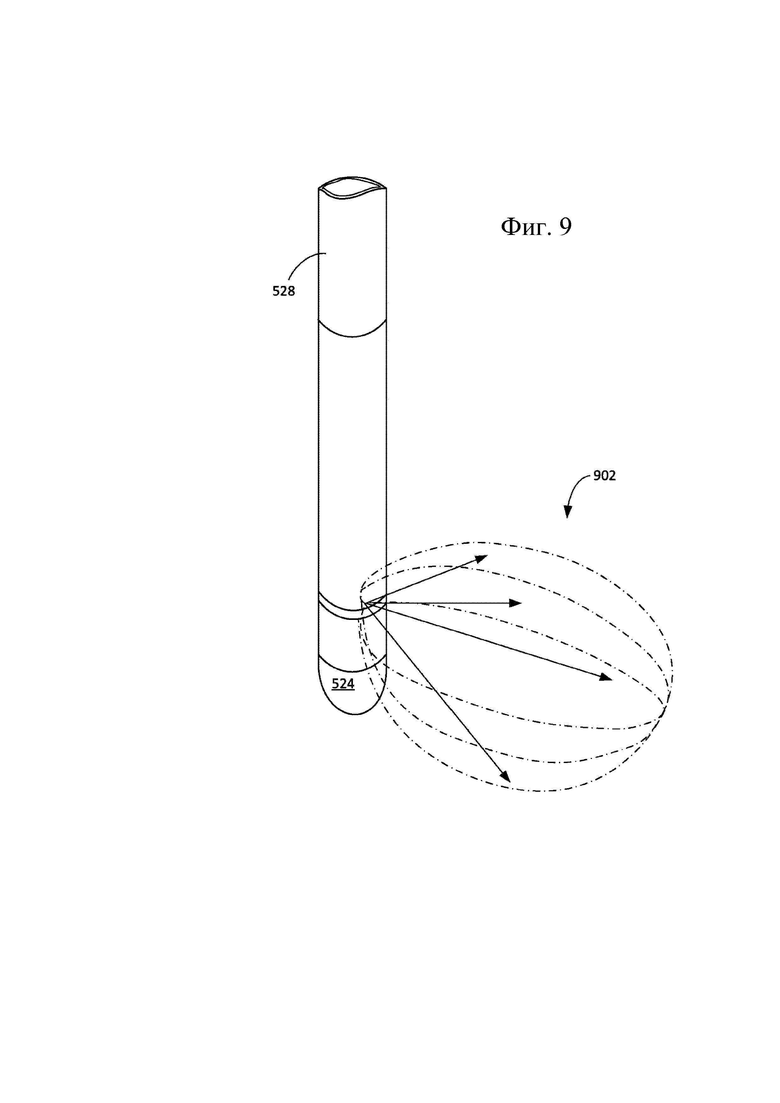
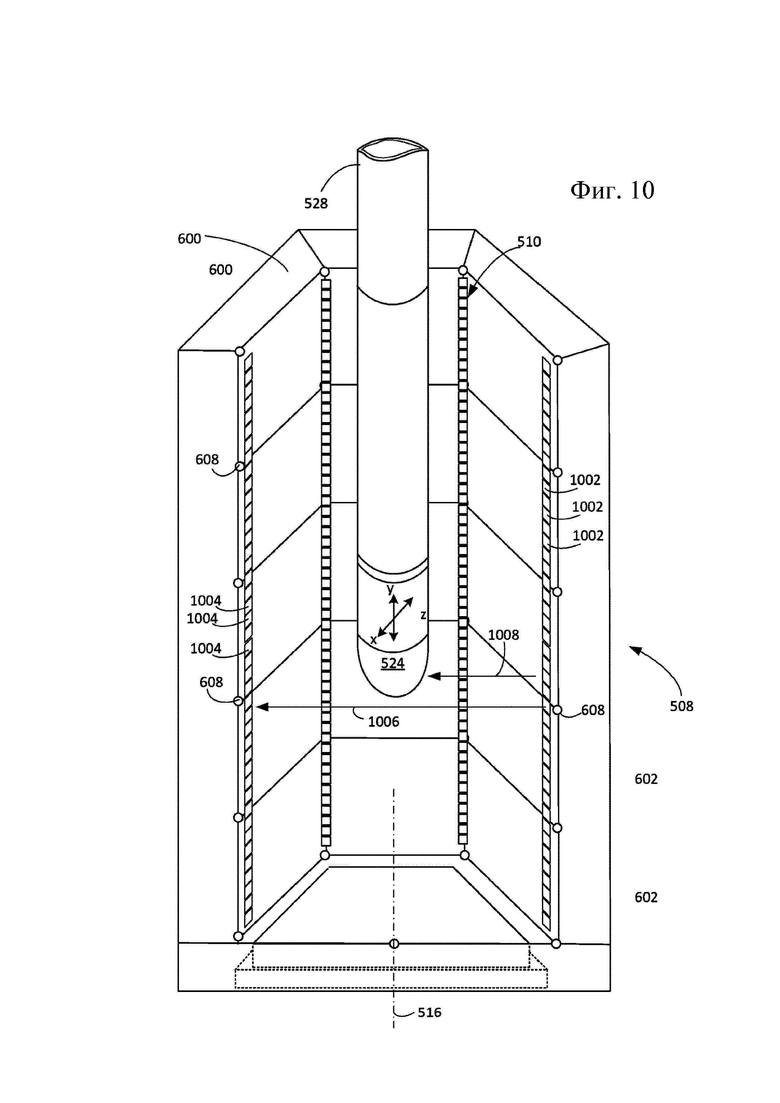
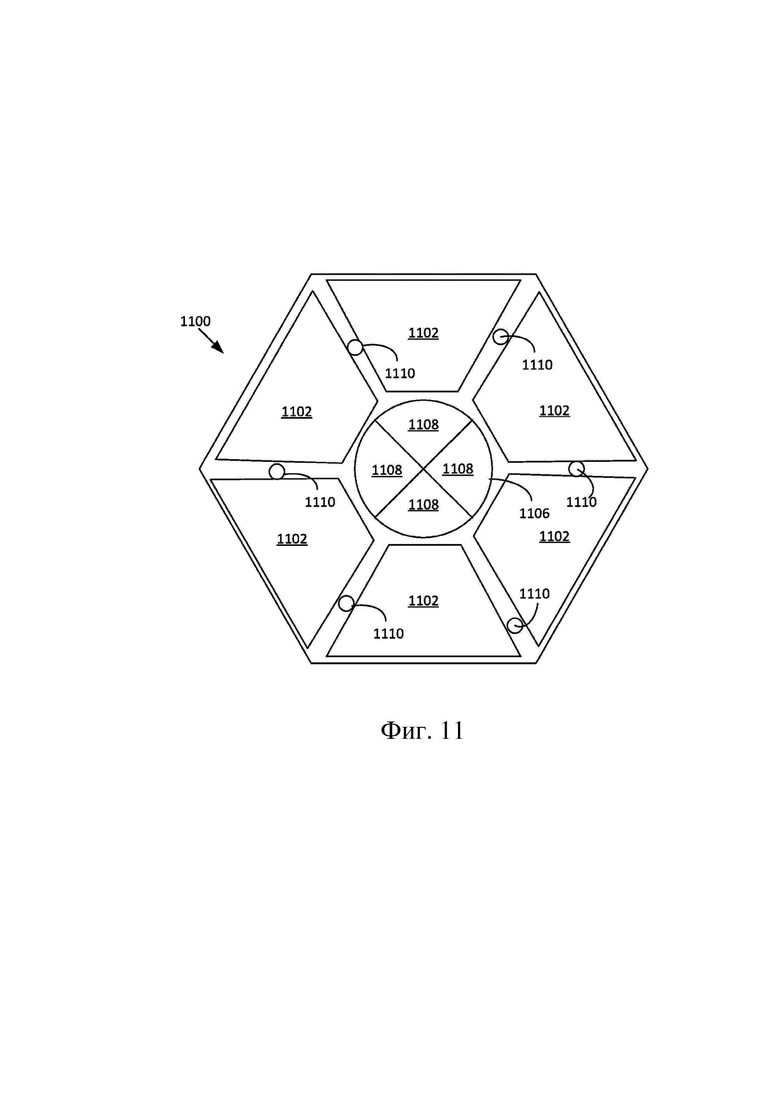
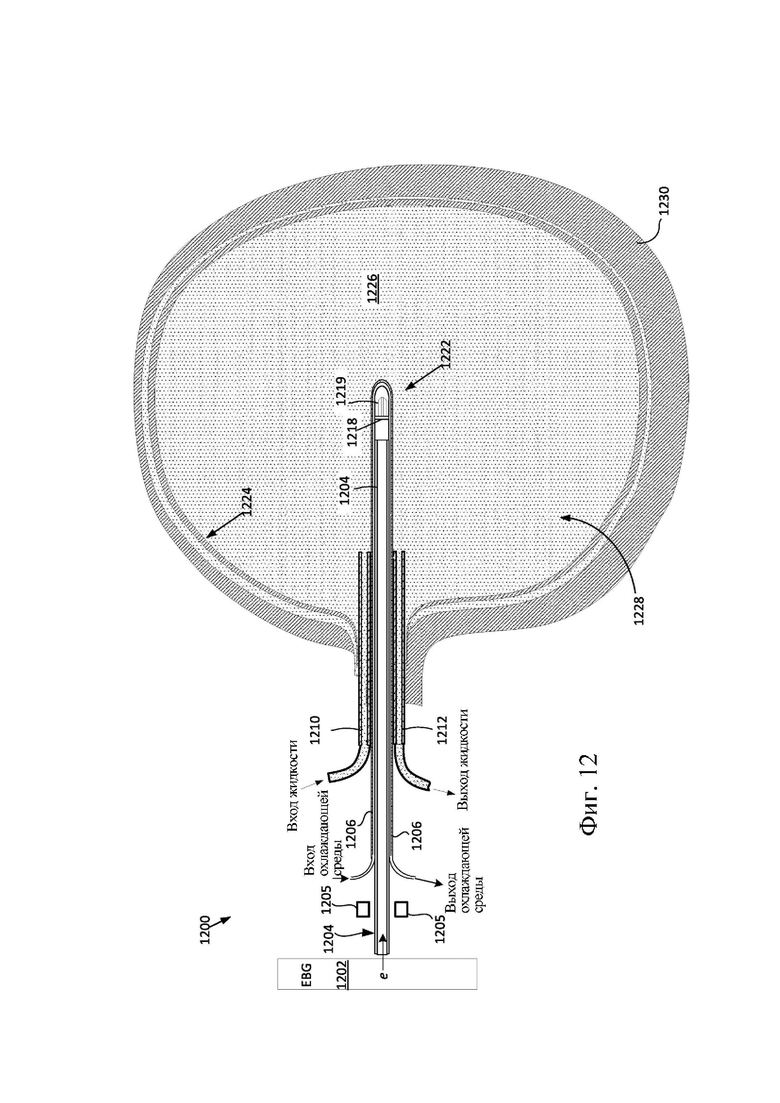
Группа изобретений относится к медицине. Система доставки рентгеновского излучения имеет переносной базовый блок, на котором установлен первый конец роботизированной руки. Насадка для рентгеновской терапии расположена на втором конце роботизированной руки. Насадка для рентгеновской терапии содержит по меньшей мере один рентгеновский компонент, выполненный с возможностью генерации терапевтического излучения в диапазоне длин волн рентгеновского излучения. В заданном положении в переносном базовом блоке расположена калибровочная ячейка. Калибровочная ячейка состоит из углубления, вовнутрь которого может быть размещена насадка для рентгеновской терапии, и имеет по меньшей мере один проход, через который может быть вставлена насадка для рентгеновской терапии с помощью роботизированной руки для операций калибровки. Калибровочная ячейка имеет чувствительные к рентгеновскому излучению элементы, расположенные в распределенных положениях вокруг периферии калибровочной ячейки. Применение группы изобретений позволит минимизировать колебания дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли. 2 н. и 18 з.п. ф-лы, 12 ил.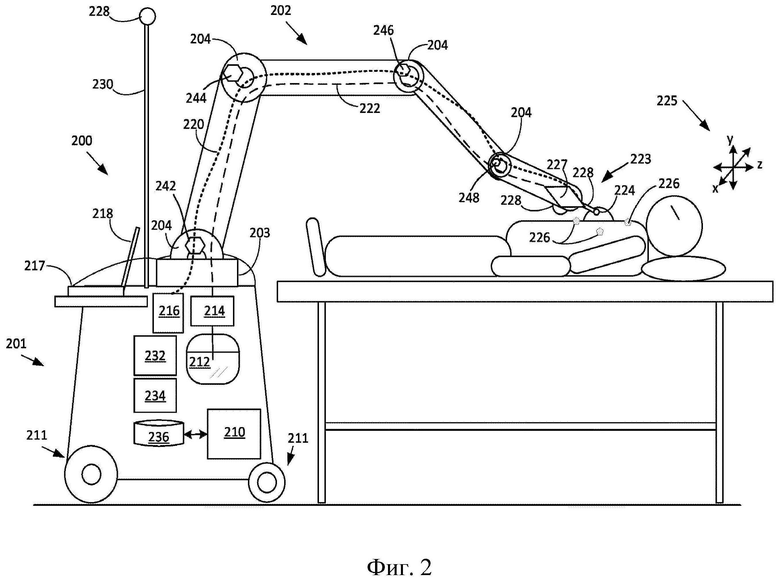
1. Система доставки рентгеновского излучения интраоперационной радиотерапии (IORT), содержащая:
- переносной базовый блок;
- первый конец роботизированной руки, установленный на базовом блоке;
- насадку для рентгеновской терапии, расположенную на втором конце роботизированной руки, удаленном от первого конца;
причем насадка для рентгеновской терапии содержит по меньшей мере один рентгеновский компонент, выполненный с возможностью генерации терапевтического излучения в диапазоне длин волн рентгеновского излучения;
- калибровочную ячейку, расположенную в заданном положении в переносном базовом блоке, при этом калибровочная ячейка состоит из углубления, выполненного с возможностью размещения внутри него насадки для рентгеновской терапии, и имеет по меньшей мере один проход, выполненный с возможностью вставки через него насадки для рентгеновской терапии с помощью роботизированной руки для операций калибровки;
причем калибровочная ячейка имеет датчики рентгеновского излучения, расположенные в распределенных положениях вокруг периферии калибровочной ячейки.
2. Система доставки рентгеновского излучения IORT по п. 1, дополнительно содержащая управляющую систему, выполненную с возможностью осуществления по меньшей мере одного процесса калибровки, включающего в себя операцию позиционирования, при которой роботизированная рука управляется управляющей системой для вставки насадки для рентгеновской терапии через проход так, что насадка для рентгеновской терапии расположена в заданном положении калибровки внутри калибровочной ячейки.
3. Система доставки рентгеновского излучения IORT по п. 2, в которой управляющая система выполнена с возможностью управления рентгеновским компонентом для создания рентгеновского излучения, имеющего диаграмму направленности, в течение времени, когда насадка для рентгеновской терапии расположена в заданном положении калибровки.
4. Система доставки рентгеновского излучения IORT по п. 3, в которой управляющая система реагирует на данные измерения, полученные от датчиков рентгеновского излучения, для определения по меньшей мере одной из следующих величин: измеренной интенсивности и измеренной диаграммы направленности рентгеновского излучения, созданного насадкой для рентгеновской терапии, в результате рентгеновского излучения.
5. Система доставки рентгеновского излучения IORT по п. 4, в которой управляющая система выполнена с возможностью сравнения измеренной диаграммы направленности с заданной диаграммой направленности.
6. Система доставки рентгеновского излучения IORT по п. 5, в которой управляющая система выполнена с возможностью изменения по меньшей мере одного рабочего параметра системы доставки рентгеновского излучения IORT в ответ на сравнение.
7. Система доставки рентгеновского излучения IORT по п. 6, в которой рабочий параметр представляет собой продолжительность времени лечения, в течение которого доставляют терапевтическую дозу рентгеновского излучения.
8. Система доставки рентгеновского излучения IORT по п. 6, в которой рабочий параметр представляет собой управляющий параметр пучка, определяющий по меньшей мере одну из следующих величин: направление основного пучка, интенсивность и форму диаграммы направленности.
9. Система доставки рентгеновского излучения IORT по п. 6, в которой рабочий параметр представляет собой управляющий параметр роботизированной руки, определяющий неподвижное положение насадки для рентгеновской терапии, используемое при применении терапевтической дозы рентгеновского излучения.
10. Система доставки рентгеновского излучения IORT по п. 6, в которой рабочий параметр представляет собой управляющий параметр перемещения, определяющий динамическое перемещение роботизированной руки, выполняемое при применении терапевтической дозы рентгеновского излучения.
11. Система доставки рентгеновского излучения IORT по п. 10, в которой динамическое перемещение представляет собой перемещение или изменение ориентации, минимизирующее колебания дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли.
12. Способ калибровки системы доставки рентгеновского излучения интраоперационной радиотерапии (IORT), содержащий:
- поддержку первого конца роботизированной руки на переносном базовом блоке;
- поддержку на втором конце роботизированной руки насадки для рентгеновской терапии, содержащей по меньшей мере один рентгеновский компонент, выполненный с возможностью генерации терапевтического излучения в диапазоне длин волн рентгеновского излучения;
- использование управляющей системы, чтобы
побуждать роботизированную руку вставить насадку для рентгеновской терапии в калибровочную ячейку, образованную углублением, расположенным в заданном положении в переносном базовом блоке;
активировать рентгеновский компонент для генерации рентгеновского излучения из насадки для рентгеновской терапии, когда насадка для рентгеновской терапии расположена в заданном положении калибровки в калибровочной ячейке;
получать данные датчиков от датчиков рентгеновского излучения, расположенных в распределенных положениях вокруг периферии калибровочной ячейки; и
использование данных датчиков для определения по меньшей мере одной из следующих величин: интенсивности и диаграммы направленности рентгеновского излучения, создаваемого насадкой для рентгеновской терапии.
13. Способ по п. 12, дополнительно содержащий использование управляющей системы для автоматического сравнения измеренной диаграммы направленности с заданной диаграммой направленности.
14. Способ по п. 13, дополнительно содержащий управление управляющей системой для автоматического изменения по меньшей мере одного рабочего параметра системы доставки рентгеновского излучения IORT в ответ на сравнение.
15. Способ по п. 14, дополнительно содержащий выбор рабочего параметра, включающего в себя продолжительность времени лечения, в течение которого доставляют терапевтическую дозу рентгеновского излучения.
16. Способ по п. 14, дополнительно содержащий выбор рабочего параметра, включающего в себя управляющий параметр пучка, определяющий по меньшей мере одну из следующих величин: направление основного пучка, интенсивность и форму диаграммы направленности.
17. Способ по п. 14, дополнительно содержащий выбор рабочего параметра, включающего в себя управляющий параметр роботизированной руки, определяющий неподвижное положение насадки для рентгеновской терапии, используемое при применении терапевтической дозы рентгеновского излучения.
18. Способ по п. 14, дополнительно содержащий выбор рабочего параметра, включающего в себя управляющий параметр перемещения, определяющий динамическое перемещение роботизированной руки, выполняемое при применении терапевтической дозы рентгеновского излучения.
19. Способ по п. 18, в котором динамическое перемещение минимизирует колебания дозы рентгеновского излучения, доставляемой насадкой для терапии к поверхностям ложа опухоли.
20. Способ по п. 18, в котором динамическое перемещение выбирают для изменения ориентации насадки для терапии.
| US 20070076851 A1, 05.04.2007 | |||
| US 20040227056 A1, 18.11.2004 | |||
| US 20140121501 A1, 01.05.2014 | |||
| RU 2013147424 A, 27.04.2015. |

