Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения в общем относятся к системе для лечения, способу калибровки и носителю информации.
Уровень техники
При лучевой терапии перед лечением пациента необходимо выполнить калибровку системы формирования изображения, такой как детектор с плоской панелью (FPD) и рентгеновская трубка, для обеспечения высокоточного позиционирования и отслеживания опухоли. В связи с этим известна технология, согласно которой в процедурном кабинете в заданной позиции устанавливается фантом с маркером, имеющим известную позицию в трехмерном пространстве процедурного кабинета, формируется изображение установленного фантома с помощью ионизирующего излучения, положение маркера определяется из зафиксированного изображения, и система формирования изображения калибруется на основе позиции маркера, полученной из этого изображения, и указанной известной позиции маркера в трехмерном пространстве.
Однако в традиционной технологии бывают случаи, когда калибровка не может быть выполнена с высокой точностью, когда трехмерная позиция маркера неизвестна или известная трехмерная позиция маркера включает погрешность. Следовательно, возможны случаи, когда позиция объекта исследования, такого как пациент, не может быть определена с высокой точностью или мишень, такая как опухоль, не может быть отслежена с высокой точностью.
Документы предшествующего уровня техники
Патентные документы
[Патентный документ 1]
Нерассмотренная заявка на патент Японии, первая публикация № 2016-221156.
Раскрытие сущности изобретения
Технические проблемы, решаемые изобретением
Задачей настоящего изобретения является предоставление системы для лечения, способа калибровки и носителя информации, позволяющих определять с высокой точностью позицию объекта исследования и отслеживать мишень с высокой точностью.
Решение проблемы
Система для лечения согласно изобретению включает в себя систему формирования изображения, содержащую в качестве устройств формирования изображения один или более источников излучения и множество детекторов, а также содержащую первое устройство сбора данных, второе устройство сбора данных, первое устройство получения данных, второе устройство получения данных и калибратор. Источники излучения излучают излучение на конкретный объект во множестве различных направлений. Множество детекторов регистрируют излучение, излучаемое источниками излучения, в разных позициях. Первое устройство сбора данных собирает множество изображений на основании излучения, зарегистрированного множеством детекторов. Второе устройство сбора данных собирает позиционную информацию, представляющую позицию и/или направление первого устройства формирования изображения в системе формирования изображения в трехмерном пространстве, в котором расположена система формирования изображения. Первое устройство получения данных определяет позиционную информацию об объекте в каждом из множества изображений, собранных первым устройством сбора данных. Второе устройство получения данных определяет позицию и/или направление второго устройства формирования изображения в системе формирования изображения в трехмерном пространстве на основе позиции объекта в изображениях, определенной первым устройством получения данных, и позиции или направлении первого устройства формирования изображения, представленных позиционной информацией, собранной вторым устройством сбора данных. Калибратор выполняет калибровку системы формирования изображения на основе результата определения данных вторым устройством получения данных.
Полезные эффекты
Согласно настоящему изобретению предоставляется система для лечения, способ калибровки и программа, позволяющие определять позицию объекта исследования с высокой точностью и с высокой точностью отслеживать мишень.
Краткое описание чертежей
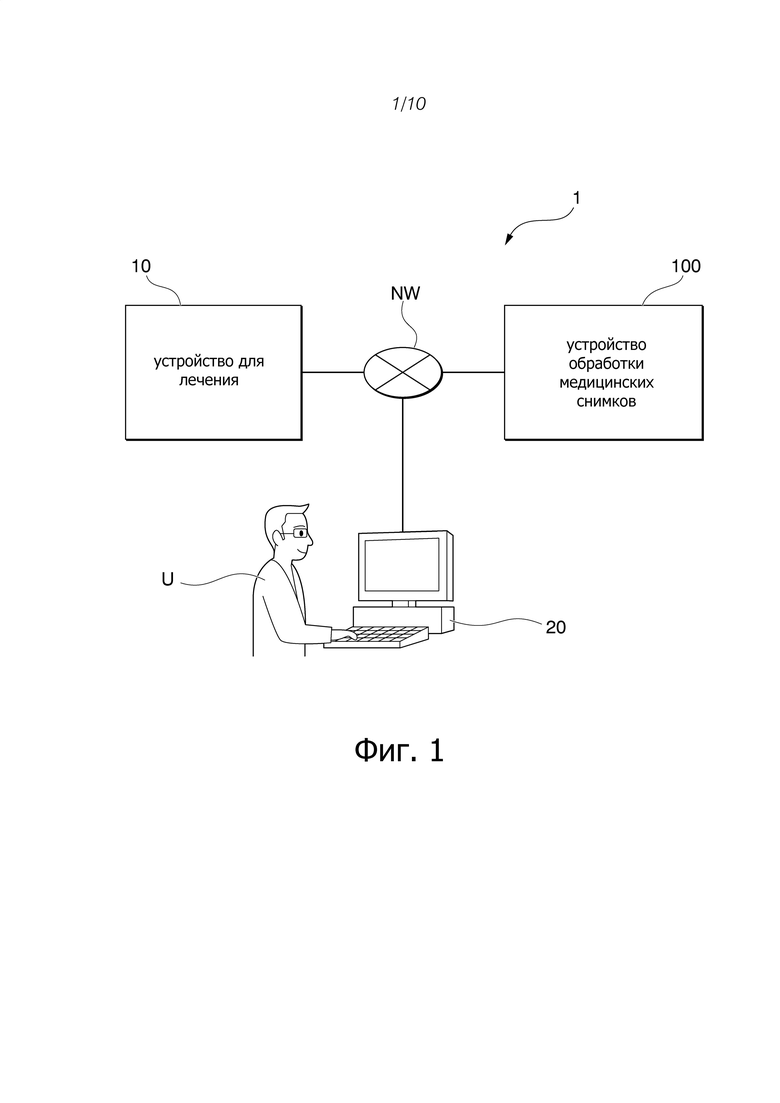
Фиг. 1 - схема, показывающая пример системы для лечения в первом варианте осуществления изобретения.
Фиг. 2 - внешний вид устройства для лечения в первом варианте осуществления изобретения.
Фиг. 3 - схема, показывающая пример конфигурации устройства обработки медицинских снимков в первом варианте осуществления изобретения.
Фиг. 4 - схема, показывающая пример конфигурации калибровочного процессора.
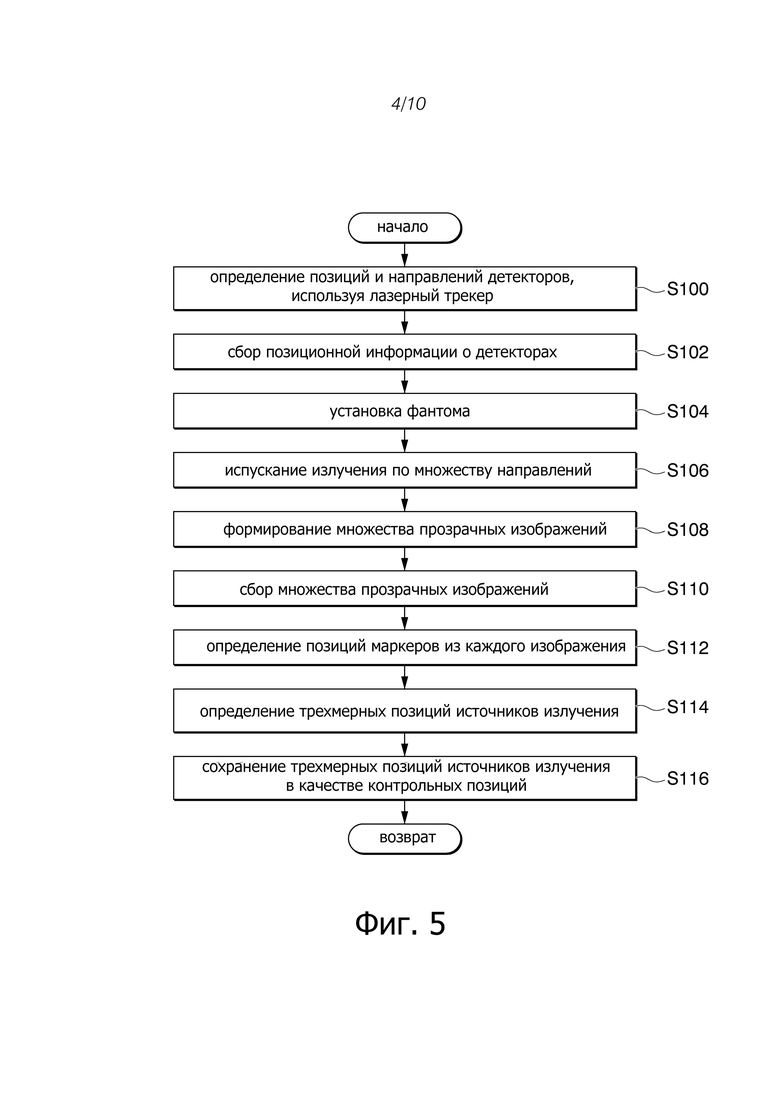
Фиг. 5 - блок-схема алгоритма, показывающая пример калибровочной обработки.
Фиг. 6 - схема, показывающая состояние, в котором излучение излучается из двух источников излучения.
Фиг. 7 - схема, показывающая способ получения трехмерной позиции источника излучения с использованием способа корректировки пучка.
Фиг. 8 - блок-схема алгоритма, показывающая другой пример калибровочной обработки.
Фиг. 9 - схема, показывающая пример экрана, отображаемого на дисплее.
Фиг. 10 - схема, показывающая пример данных плана лечения.
Фиг. 11 - схема, показывающая способ выбора прозрачного изображения на основе плана лечения.
Фиг. 12 - схема, показывающая способ выбора прозрачного изображения на основе плана лечения.
Описание вариантов осуществления изобретения
Далее со ссылкой на чертежи будут описаны система для лечения, способ калибровки и программа для вариантов осуществления изобретения.
Первый вариант
Фиг. 1 представляет схему, показывающую пример системы 1 для лечения по первому варианту осуществления изобретения. Например, система 1 для лечения включает в себя устройство 10 для лечения, оконечное устройство 20 и устройство 100 обработки медицинских снимков. Эти устройства подключены через сеть NW. Сеть NW включает в себя, например, интернет, глобальную сеть (WAN), локальную сеть (LAN), терминал провайдера, сеть беспроводной связи, беспроводную базовую станцию, выделенную линию и т.п. Как показано на фиг. 1, отсутствует необходимость в обмене данными между всеми устройствами и часть сети NW может включать в себя локальную сеть.
Устройство 10 для лечения представляет собой устройство, которое излучает первое излучение в виде луча (в дальнейшем - лечебный пучок В) на объект OB исследования в любом направлении в диапазоне 360°, при этом объект OB исследования рассматривается качестве центра. Объект OB исследования является пациентом, который получает лечение, например, с использованием лечебного пучка B. Первое излучение включает в себя, например, излучение частиц, такое как пучок тяжелых частиц, пучок электронов, пучок протонов и пучок нейтронов и электромагнитное излучение, такое как рентгеновские лучи (Х-лучи) и гамма-лучи (γ-лучи). Устройство 10 для лечения излучает второе излучение для формирования томограммы объекта OB исследования для проверки позиции объекта OB исследования. Второе излучение включает в себя, например, электромагнитное излучение, такое, как рентгеновские лучи. Далее будет описан пример, в котором первое излучение (лечебный пучок В) является «пучком тяжелых частиц» и второе излучение является «рентгеновскими лучами (Х-лучами)».
Оконечное устройство 20 используется пользователем (в дальнейшем - оператор U техобслуживания), который выполняет техобслуживание, такое как подготовка и обслуживание, ремонт, осмотр и регулировка устройства 10 для лечения. Например, оконечное устройство 20 может быть оконечным устройством, включающим в себя устройство ввода, устройство отображения, устройство связи, запоминающее устройство и арифметическое устройство, такое как сотовый телефон, такое как смартфон, планшетный терминал и различные персональные компьютеры. Устройство связи оконечного устройства 20 включает в себя сетевую карту, такую как карта сетевого интерфейса (NIC), модуль беспроводной связи и т.п.
Устройство 100 обработки медицинских снимков отслеживает мишень, которая перемещается в соответствии с дыханием и сердечными сокращениями пациента, который является объектом ОВ исследования, и излучает лечебный пучок B в устройство 10 для лечения относительно отслеживаемой мишени в соответствующее время. Мишенью является орган, например, легкое или печень. Отслеживание мишени выполняется на основании томограммы объекта ОВ исследования, снятой с использованием рентгеновских лучей или т.п. на этапе, предшествующем этапу лечения, и прозрачного изображения, полученного путем формирования изображения объекта ОВ исследования на этапе лечения.
Устройство 100 обработки медицинских снимков может определять позиционное расстояние между позицией объекта ОВ исследования на этапе лечения и позицией объекта ОВ исследования после составления плана лечения, и предоставлять информацию о полученном позиционном расстоянии специалисту (врачу или т.п.), который выполняет лучевую терапию с использованием системы 1 для лечения.
Фиг. 2 представляет внешний вид устройства 10 для лечения по первому варианту осуществления изобретения. Устройство 10 для лечения по первому варианту включает в себя, например, стол 11, кронштейн 11a, множество источников 12 излучения (отверстия для излучения), два детектора 13-1 и 13-2, излучающее окно 14, датчик 15 и контроллер 16 устройства для лечения. Два детектора 13-1 и 13-2 являются примером «детекторов».
Множество источников 12 излучения, два детектора 13-1 и 13-2 и излучающее окно 14 расположены в кольцеобразном корпусе (в форме тора), который называется поворотным гантри G. Например, когда вертикальное направление трехмерного пространства, представляющего комнату (в дальнейшем называемую процедурным кабинетом), в котором установлено устройство 10 для лечения, обозначено Zf, одна сторона горизонтального направления обозначена Xf, и другая сторона обозначена Yf , поворотное гантри G установлено так, что направление Yf является осью вращения, гантри может поворачиваться на 360° вокруг оси вращения. Поворотное гантри G является примером «системы формирования изображения», а каждый из множества источников 12 излучения и двух детекторов 13-1 и 13-2, предусмотренных в поворотном гантри G, является примером «устройства формирования изображения». Излучающее окно 14 является примером «источника пучка частиц».
Объект OB исследования фиксируется на столе 11. Кронштейн 11a одним концом прикреплен к полу или т.п. процедурного кабинета, и другой конец прикреплен к столу 11 и перемещает стол 11 в направлении снаружи во внутрь или в направлении изнутри наружу поворотного гантри G в состоянии, в котором стол 11 отделен от пола или т.п. процедурного кабинета.
Множество источников 12 излучения расположены, например, с заданными интервалами в окружном направлении поворотного гантри G. Каждый источник 12 излучения излучает, например, рентгеновские лучи на внутреннюю периферийную сторону поворотного гантри G. Соответственно, когда стол 11 перемещается внутрь поворотного гантри G, например, рентгеновские лучи излучаются в направлении объекта OB, закрепленного на столе 11, по множеству различных направлений в диапазоне 360°. Устройство генерации излучения (не показано), которое генерирует рентгеновские лучи, может быть установлено вне процедурного кабинета.
Детекторы 13-1 и 13-2 регистрируют, например, рентгеновское излучение, излучаемое источниками 12 излучения. Например, детекторы 13-1 и 13-2 включают в себя прямоугольный детектор, такой как детектор с плоской панелью (FPD), усилитель изображения или усилитель цветного изображения. Например, детекторы 13-1 и 13-2 преобразуют аналоговый сигнал, основанный на детектированных рентгеновских лучах, в цифровой сигнал и выводят цифровой сигнал в устройство 100 обработки медицинских снимков в качестве прозрачного изображения TI. Прозрачное изображение TI представляет собой двухмерное изображение и является томограммой объекта OB исследования. Количество детекторов, предусмотренных в поворотном гантри G, не ограничивается 2 и может составлять 3 или более.
Излучающее окно 14 расположено в определенной позиции в окружном направлении поворотного гантри G. Излучающее окно 14 излучает лечебный пучок B на внутреннюю периферийную сторону поворотного гантри G. Хотя в поворотном гантри G в примере на фиг. 1 одно излучающее окно 14, настоящее изобретение этим не ограничивается. Например, в поворотном гантри G может быть множество излучающих окон. Устройство генерации излучения (не показано), которое генерирует лечебный пучок B, может быть установлено вне процедурного кабинета.
Датчик 15 представляет собой датчик, который обнаруживает перемещение пораженной части в соответствии с фазой дыхания пациента, когда объектом OB является пациент. Например, датчик 15 представляет собой датчик давления. В этом случае датчик 15 может быть прикреплен к телу пациента. Датчик 15 выводит информацию, представляющую обнаруженную фазу дыхания пациента, в виде колебательного сигнала в устройство 100 обработки медицинских снимков.
Контроллер 16 устройства для лечения реализован, например, с помощью аппаратного процессора, такого как центральный процессор (CPU) или графический процессор (GPU), выполняющий программу (программное обеспечение), хранящуюся в запоминающем устройстве (не показано), таком как постоянная память (ROM). Контроллер 16 устройства для лечения может быть реализован аппаратными средствами (схема: цепь), например схемой крупномасштабной интеграции (LSI), специализированной интегральной схемой (ASIC) или программируемой пользователем вентильной матрицей (FPGA), или реализован с помощью программного обеспечения и совместно с аппаратным обеспечением.
Контроллер 16 устройства для лечения управляется устройством 100 обработки медицинских снимков для управления множеством источников 12 излучения, детекторами 13-1 и 13-2 и излучающим окном 14. Контроллер 16 устройства для лечения управляется устройством 100 обработки медицинских снимков для поворота поворотного гантри G.
Фиг. 3 является схемой, показывающей пример конфигурации устройства 100 обработки медицинских снимков в первом варианте осуществления изобретения. Устройство 100 обработки медицинских снимков в первом варианте осуществления изобретения включает, например, коммуникатор 102, устройство 104 ввода, дисплей 106, контроллер 110 устройства обработки медицинских снимков и память 130.
Коммуникатор 102 включает в себя, например, интерфейс связи, такой как NIC. Коммуникатор 102 устанавливает связь с устройством 10 для лечения и оконечным устройством 20 через сеть NW и принимает различные типы информации. Коммуникатор 102 выводит принятую информацию в контроллер 110 устройства обработки медицинских снимков. Коммуникатор 102 может управляться контроллером 110 устройства обработки медицинских снимков для передачи информации в устройство 10 для лечения и оконечное устройство 20, подключенные через сеть NW. Коммуникатор 102 является примером «устройства вывода».
Например, устройство 104 ввода принимает данные операции ввода от пользователя, такого как врач или медсестра, и выводит сигнал на основании принятых данных операции ввода в контроллер 110 устройства обработки медицинских снимков. Например, устройство 104 ввода реализовано с помощью мыши, клавиатуры, трекбола, переключателя, кнопки, джойстика, сенсорной панели и т.п. Устройство 104 ввода может быть реализовано, например, с помощью пользовательского интерфейса, который принимает аудиовход, такого как микрофон. Когда устройство 104 ввода является сенсорной панелью, дисплей 106, который будет описан позже, может быть интегрирован с устройством 104 ввода.
Дисплей 106 отображает различные типы информации. Например, дисплей 106 отображает изображение, генерируемое контроллером 110 устройства обработки медицинских снимков, или отображает графический пользовательский интерфейс (GUI) или т.п. для приема данных операции ввода от оператора. Например, дисплей 106 представляет собой жидкокристаллический дисплей (LCD), дисплей с органической электролюминесценцией (EL) и т.п. Дисплей 106 является еще одним примером «устройства вывода».
Контроллер 110 устройства обработки медицинских снимков включает в себя, например, первое устройство 112 сбора данных, второе устройство 114 сбора данных, процессор 116 изображения, контроллер 118 излучения лечебного пучка, контроллер 120 вывода информации и процессор 122 калибровки. Контроллер 16 устройства для лечения и контроллер 118 излучения лечебного пучка являются примером «контроллера излучения».
Эти компоненты реализуются аппаратным процессором, таким как CPU или GPU, выполняющим программу (программное обеспечение), хранящуюся в памяти 130. Некоторые или все из этих компонентов могут быть реализованы аппаратными средствами (схемой, цепью), например LSI, ASIC или FPGA, или комбинацией программного и аппаратного обеспечения. Вышеупомянутая программа может быть сохранена в памяти 130 заранее или сохранена на съемном носителе данных, таком как DVD или CD-ROM, и установлена в памяти 130 с носителя данных, когда носитель данных вставлен в устройство привода устройства 100 обработки медицинских снимков.
Память 130 реализована, например, с помощью запоминающего устройства, такого как ROM, флэш-память, оперативная память (RAM), жесткий диск (HDD), твердотельный накопитель (SSD) или регистр. Флэш-память, жесткий диск, твердотельный накопитель и т.п. являются постоянными носителями данных. Эти постоянные носители данных могут быть реализованы другими запоминающими устройствами, подключенными через сеть NW, такими как сетевая память (NAS) и внешнее запоминающее устройство сервера. Например, данные 132 четырехмерных томограмм, данные 134 плана лечения и т.п. хранятся в памяти 130. Они будут описаны позже.
Например, данные 132 четырехмерной томограммы представляют собой временную последовательность из n трехмерных томограмм (КT-снимков), которые представляют собой данные трехмерного объема. Трехмерные томограммы снимаются, например, на этапе планирования лечения. Период, полученный умножением n на временной интервал между снимками временного ряда, задается таким образом, чтобы он охватывал период, в котором фаза дыхания изменяется, например, на один цикл. Фаза дыхания в течение одного цикла является фазой, охватывающий период от того момента, когда пациент выдыхает и затем вдыхает, до того момента, когда пациент снова выдыхает. Например, n = 10. Например, область, указывающая очертание опухоли, которая является пораженной частью, область, указывающая очертание органа, на который не желательно направлять лечебный пучок B, и т.п. задаются данными операции ввода врача или т.п. на области изображения по меньшей мере одной из n трехмерных томограмм. В других трехмерных томограммах те же области, что и области контуров, заданные данными операции ввода врача или т.п., автоматически устанавливаются в соответствии с деформируемой регистрацией. Деформируемая регистрация представляет собой обработку информации с позиционным расширением (очертания органа или т.п. в приведенном выше случае), определяемой в отношении данных трехмерного объема в определенный момент времени и в отношении данных трехмерного объема в другой момент времени, для данных трехмерного объема во временной последовательности.
Данные 134 плана лечения представляют собой данные, представляющие план лечения, сформированный (запланированный) на этапе планирования лечения. План лечения представляет собой, например, план, в котором направление излучения лечебного пучка B, такое как направление, в котором будет излучаться лечебный пучок B, когда пациент, который является объектом ОВ исследования, находится на позиции, и интенсивность лечебного пучка B, когда лечебный пучок B излучается, и т.п. были определены для каждого пациента, который является объектом ОВ исследования. Этот план лечения может быть составлен на основании способа лечения, такого как способ c управляемым излучением или способ с отслеживающим излучением.
Первое устройство 112 сбора данных получает, например, прозрачные изображения TI от детекторов 13-1 и 13-2 через коммуникатор 102. Поскольку прозрачные изображения TI генерируются детекторами 13-1 и 13-2 в реальном времени во время обработки, например, первое устройство 112 сбора данных получает прозрачные изображения TI, продолжающиеся временную последовательность.
Второе устройство 114 сбора данных получает позиционную информацию, представляющую позиции или направления (позиции или направления в трехмерном пространстве процедурном кабинете) одного или нескольких устройств формирования изображения, предусмотренных на поворотном гантри G. Например, трехмерные позиции или направления устройств формирования изображения измеряются лазерным трекером. Предполагается, что позиция лазерного трекера определяется как относительная позиция на основе объекта (например, оси вращения поворотного гантри G или т.п.), который является исходной точкой в трехмерном пространстве процедурного кабинета.
В настоящем варианте осуществления, в качестве примера, устройства формирования изображения, имеющие позиции или направления, измеренные лазерным трекером, будут описаны как детекторы 13-1 и 13-2. Устройства формирования изображения, позиции или направления которых измеряются лазерным трекером, могут быть источниками 12 излучения. Например, когда измеряются позиции и направления детекторов 13-1 и 13-2, медицинский работник, такой как врач или медсестра, получает относительные позиции множества зондов путем установки зондов (например, отражателей и т.п.), которые легко отражают лазерные лучи в трех или более точках плоскостей обнаружения датчиков 13-1 и 13-2, и измерения зондов с помощью лазерного трекера. Затем медицинский работник получает информацию о позициях и направлениях детекторов 13-1 и 13-2 на основании относительных позиций множества зондов. Устройство формирования изображения, позиция или направление которого измеряется лазерным трекером, является примером «первого устройства формирования изображения».
Когда трехмерные позиции устройств формирования изображения измерены лазерным трекером, второе устройство 114 сбора данных получает информацию о позиции, представляющую трехмерные позиции устройств формирования изображения из лазерного трекера через коммуникатор 102. Когда врач или иной сотрудник вводит информацию о позиции в устройство 104 ввода, второе устройство 114 сбора данных может получать информацию, введенную в устройство 104 ввода, как информацию о позиции, представляющую трехмерные позиции устройств формирования изображения. Измерение позиций или направлений устройств формирования изображения не ограничивается измерением с использованием лазерного трекера, и позиции или направления устройств формирования изображения могут быть измерены, например, с использованием стереокамеры или датчика контактного типа.
Процессор 116 изображения определяет позицию объекта ОВ исследования. Например, процессор 116 изображения формирует цифровую реконструированную рентгенограмму (DRR) на основе трехмерной томограммы каждой фазы дыхания, включенной в данные 132 четырехмерной томограммы каждого объекта ОВ исследования, хранящиеся в памяти 130. DRR представляет собой виртуальное прозрачное изображение, генерируемое из данных трехмерного объема в отклике на виртуальный источник излучения, когда предполагается, что излучение излучается из виртуального источника излучения для получения трехмерной томограммы (данных трехмерного объема).
Например, процессор 116 изображения формирует DRR, когда в точке наблюдения трехмерная томограмма наблюдается в том же направлении, что и направление излучения рентгеновских лучей, излучаемых на текущий объект ОВ исследования; для формирования DRR применяется метод, называемый 3D-2D регистрацией, на основе трехмерной томограммы каждой фазы дыхания, содержащейся в данных 132 четырехмерной томограммы, а также на основе прозрачного изображения TI на стороне детектора 13-1 и прозрачного изображения TI на стороне детектора 13-2, полученные первым устройством 112 сбора данных. Когда процессор 116 изображения формирует DRR, процессор 116 изображения может сформировать DRR, которая является виртуальной двухмерной томограммой, путем отображения информации трехмерной томограммы с использованием метода отслеживания лучей. Здесь процессор 116 изображения может интегрировать значение каждого элемента трехмерной томограммы и использовать интегрированное значение в качестве значения элемента для каждого элемента DRR или использовать максимальное значение из значений каждого элемента трехмерной томограммы в качестве значения элемента для каждого элемента DRR.
Например, процессор 116 изображения выбирает в качестве эталонного изображения рентгенограмму DRR, соответствующую трехмерной томограмме фазы выдоха, из рентгенограмм DRR, соответствующих трехмерным томограммам фаз дыхания. Фаза выдоха представляет собой томограмму, зафиксированную в состоянии выдоха пациента, являющийся объекта ОВ исследования.
Процессор 116 изображения сравнивает DRR, выбранную в качестве эталонного изображения с прозрачными изображениями TI, последовательно полученными первым устройством 112 сбора данных, и выполняет сопоставление позиции мишени (органа или т.п.). Когда позиции мишени в DRR и прозрачных изображениях TI совпадают, процессор 116 изображения определяет, что фаза дыхания (фаза выдоха) трехмерного изображения, которое является источником DRR, соответствует текущей фазе дыхания пациента и разрешает излучение лечебного пучка B. Процессор 116 изображения может также разрешать излучение лечебного пучка B, когда позиция мишени находится в пределах области облучения, определенной заранее. Медицинский работник может произвольно определить область облучения.
Контроллер 118 излучения лечебного пучка дает команду излучающему окну 14 излучать лечебный пучок В на объект OB исследования в позиции, определяемой процессором 116 изображения, когда процессор 116 изображения разрешает выполнить излучение лечебного пучка В. Например, контроллер 118 излучения лечебного пучка извлекает информацию, такую как угол излучения лечебного пучка B и интенсивность лечебного пучка B из плана лечения, указанного в данных 134 плана лечения, и выводит различные виды извлекаемой информации в контроллер 16 устройства для лечения. При приеме этой информации контроллер 16 устройства для лечения дает команду на поворот поворотного гантри G или дает команду на излучение излучающим окном 14 лечебного пучка B.
Контроллер 120 вывода информации дает команду дисплею 106 отображать изображение или дает команду коммуникатору 102 передавать информацию, например, в ответ на наличие или отсутствие разрешения на излучение лечебного пучка B.
Процессор 122 калибровки выполняет калибровку поворотного гантри G. Фиг. 4 представляет схему, показывающую пример конфигурации процессора 122 калибровки. Процессор 122 калибровки включает в себя, например, первое устройство 122a получения данных, второе устройство 122b получения данных и калибратор 122с.
В дальнейшем с использованием блок-схемы алгоритма будет описана обработка данных каждым компонентом процессора 122 калибровки. Фиг. 5 является блок-схемой алгоритма, показывающей пример калибровочной обработки данных. Обработка данных в соответствии с этим алгоритмом может неоднократно выполняться в первом цикле. Первый цикл составляет, например, примерно один или несколько месяцев.
Сначала медицинский работник или другой сотрудник определяет позиции и направления детекторов 13-1 и 13-2, используя лазерный трекер или т.п. (этап S100).
Затем второе устройство 114 сбора данных собирает позиционную информацию, представляющую позиции и направления детекторов 13-1 и 13-2 в трехмерном пространстве (этап S102). Соответственно, во время калибровки в качестве известной информации обрабатываются позиции и направления детекторов 13-1 и 13-2 в трехмерном пространстве.
Затем медицинский работник или другой сотрудник устанавливает внутри поворотного гантри G фантом, имеющий четыре или более встроенных в него маркера, так что фантом проецируется в прозрачное изображение TI (этап S104). Фантом является, например, акриловым корпусом кубической формы.
Маркер может быть любым объектом, ослабляющим рентгеновские лучи, например, железным шаром или проволокой. По меньшей мере один из четырех или более маркеров встроен в фантом таким образом, что он находится в плоскости, отличной от плоскости (двухмерного пространства), в которой находятся другие три или более маркера в трехмерном пространстве в фантоме. Соответственно, пространство, которое образуется при использовании в качестве вершин встроенных в фантом маркеров, является трехмерным пространством. Предполагается, что позиция этих маркеров и позиционные соотношения между позициями маркеров известны заранее.
Медицинский работник или другой специалист может разместить объект, имеющий отношение к устройству 10 для лечения, такой как стол 11 и кронштейн 11a, внутри поворотного гантри G вместо установки фантома.
Затем медицинский работник или другой специалист вводит информацию о завершении установки фантома в устройство 104 ввода. После приема этой информации контроллер 16 устройства для лечения устройства 10 для лечения выбирает два источника 12 излучения из множества источников 12 излучения и дает команду на два выбранных источника 12 излучения излучать рентгеновские лучи в разных направлениях, по множеству направлений (этап S106).
На фиг. 6 схематично показано состояние, в котором два источника 12 излучения излучают излучение. На чертеже, 12-1 представляет один источник излучения из двух выбранных источников 12 излучения, и 12-2 представляет другой источник излучения из двух выбранных источников 12 излучения. Пунктирная линия r-1 представляет рентгеновские лучи, излучаемые источником 12-1 излучения, и пунктирная линия r-2 представляет рентгеновские лучи, излучаемые источником 12-2 излучения. PH обозначает фантом, и MK обозначает маркер. 14а обозначает отверстие для излучения (источник тяжелых частиц) лечебного пучка B, излучаемого из излучающего окна 14.
Например, контроллер 16 устройства для лечения дает команду поворотному гантри G поворачиваться так, чтобы угол относительно оси вращения поворотного гантри G стал конкретным углом θ1, и дает команду источникам 12-1 и 12-2 излучения излучать рентгеновские лучи. Затем контроллер 16 устройства для лечения дает команду поворотному гантри G поворачиваться так, чтобы угол относительно оси вращения поворотного гантри G стал углом θ2, смещенным от угла θ1 на заранее определенный угол (например, 15°), и дает команду источникам 12-1 и 12-2 излучения излучать рентгеновские лучи. Когда поворотное гантри G поворачивается, позиция фантома PH (маркеры MK), отображаемая с помощью рентгеновских лучей, не изменяется. Таким образом, контроллер 16 устройства для лечения дает команду детектором 13-1 и 13-2 формировать прозрачные изображения TI, фиксирующие фантом PH по множеству направлений, путем многократной подачи команды на источники 12-1 и 12-2 излучения излучать рентгеновские лучи, подачи команды на поворотное гантри G поворачиваться на каждый заданный угол (этап S108). Например, когда источники 12-1 и 12-2 излучения излучают рентгеновские лучи, при изменении угла на 15° в диапазоне 360°, каждый из детекторов 13-1 и 13-2 генерирует 24 прозрачных изображения TI (всего 48, что соответствует сумме изображений двух детекторов).
Затем первое устройство 112 сбора данных получает множество прозрачных изображений TI от детекторов 13-1 и 13-2 через коммуникатор 102 (этап S110).
Затем первое устройство 122a получения данных определяет позиции маркеров MK в отношении каждого из множества прозрачных изображений TI, полученных первым устройством 112 сбора данных (этап S112).
Например, первое устройство 122a получения данных определяет позиции маркеров MK путем сопоставления с эталоном: сопоставление прозрачных изображений TI с заранее подготовленным эталонным изображением. Изображение маркеров MK, захваченное заранее, изображение, сгенерированное посредством моделирования, и т.п. могут использоваться в качестве эталонного изображения. Когда форма маркеров MK известна, первое устройство 122a получения данных может сканировать фильтр формы для извлечения формы маркеров MK посредством растрового сканирования или т.п. для прозрачных изображений TI и определять позиции, имеющие высокие степени совпадения с фильтром формы, как позиции маркеров МК.
Затем второе устройство 122b получения данных определяет трехмерные позиции источников 12-1 и 12-2 излучения, которые являются неизвестными параметрами, на основании позиций маркеров MK, определенных из прозрачных изображений TI, и позиционной информации, полученной вторым устройством 114 сбора данных (этап S114). Когда устройства формирования изображения, позиции или направления которых измеряются лазерным трекером, являются источниками 12 излучения, второе устройство 122b получения данных может определять позиции и направления детекторов 13-1 и 13-2, которые являются неизвестными параметрами. Устройство формирования изображения, имеющее трехмерную позицию, определенную вторым устройством 122b получения данных, является примером «второго устройства формирования изображения».
Например, при повороте поворотного гантри G маркеры MK отображаются в нескольких направлениях, трехмерные позиции маркеров MK, которые являются объектами визуализации, неизвестны, но их позиции неизменны. Соответственно, трехмерная позиция каждого объекта может быть представлена как общий параметр между прозрачными изображениями TI. Например, второе устройство 122b получения данных может определить позиции источников 12-1 и 12-2 излучения, применяя способ получения трехмерных позиций и параметров системы формирования изображения на основании характерных точек, соответствующих друг другу между многовидовыми изображениями, такие как корректировка пучка. Метод, называемый корректировкой пучка, представляет собой метод корректировки всех неизвестных параметров таким образом, что, когда маркеры MK повторно проецируются на изображение с использованием оцененных параметров системы формирования изображения, позиции повторно проецируемых маркеров MK соответствуют позициям маркеров, обнаруженных на изображении, насколько это возможно.
Фиг. 7 является схемой, показывающей метод получения трехмерной позиции источника 12 излучения в соответствии с методом корректировки пучка. Например, когда количество маркеров MK, встроенных в фантом PH, равно N, трехмерная позиция каждого маркера MK представлена как Xi (→) = (Xi, Yi, Zi) t, как в проиллюстрированном примере. «I» представляет собой любое натуральное число от 1 до N, t обозначает транспонирование, и (→) обозначает вектор. Позиция каждого маркера MK, полученная из M наборов прозрачных снимков TI, полученных путем формирования изображения под углами M типов, представлено как xij (→) = (xij, yij) t. «J» является любым натуральным числом от 1 до M.
Когда матрица проекции, с помощью которой проецируется трехмерная позиция Xi (→) каждого маркера MK на плоскость j-го прозрачного изображения TI, устанавливается на Pj (→), позиция, в которой i-й маркер MK должен проецироваться на j-е прозрачное изображение TI, представляется как xij (~) (→) = (xij (~), yij (~)) t. (~) представляет символ тильды. Например, второе устройство 122b получения данных определяет позицию (двумерную позицию в изображении) xij (~) (→) i-го маркера MK, проецируемого на j-е прозрачное изображение TI, путем решения математического выражения (1).
Выражение 1

Например, второе устройство 122b получения данных ищет различные типы параметров, которые минимизируют общую (в дальнейшем называемую ошибкой повторного проецирования) сумму квадратов разностей (дисперсий) между позициями xij (~) (→), до которых соответствующие маркеры MK должны быть спроецированы и определены позиции xij (→) соответствующих маркеров MK посредством корректировки пучка.
Например, второе устройство 122b получения данных определяет матрицу Pj (→) проекции на основании базового вектора Rj (→) = (uj, vj, wj) детектора 13, когда было захвачено j-е прозрачное изображение TI, центральную позицию Cj (→) = (cxj, cyj, czj) t плоскости обнаружения детектора 13 (центральная позиция прозрачного изображения TI), и трехмерную позицию Tj (→) = (lxj, lyj, lzj) t источника 12 излучения. Центральная позиция Cj (→) плоскости обнаружения детектора 13 является трехмерной позиции ((w - 1) / 2, (h - 1) / 2), когда ширина прозрачного изображения TI является w и высота является h.
Например, второе устройство 122b получения данных получает матрицу Pj (→) проекции с использованием вышеописанных параметров на основании математического выражения (2).
Выражение 2
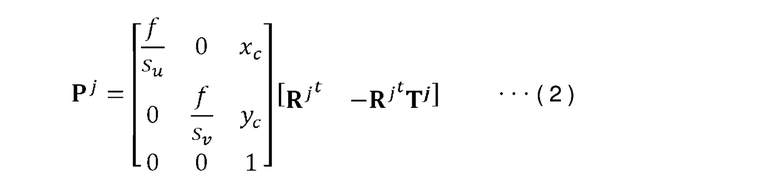
В математическом выражении (2) f представляет собой расстояние от трехмерной позиции источника 12 излучения до трехмерной позиции детектора 13, su и sv представляют собой шаг пикселей по осям (u, v) прозрачного изображения. TI, и xc и yc представляют позицию пересечения на изображении, когда оптическая ось w пересекает плоскость обнаружения детектора 13. Расстояние f может быть представлено как математическое выражение (3), и позиция пересечения (xc, yc) может быть представлена в виде математического выражения (4).
Выражение 3

Выражение 4

Второе устройство 122b получения данных вычисляет ошибку повторного проецирования на основании математического выражения (5). Поскольку позиции и направления детекторов 13-1 и 13-2 в трехмерном пространстве известны, как описано выше, параметрами, подлежащими оптимизации, являются трехмерная позиция Tj (→) источника 12 излучения и трехмерные позиции Xi (→) маркеров MK.
Выражение 5
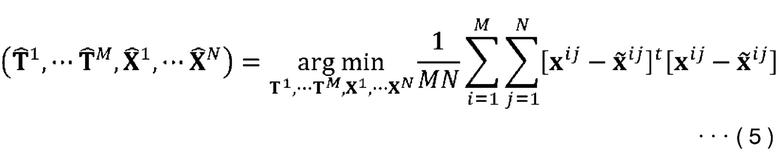 …(5)
…(5)
Например, второе устройство 122b получения данных может выполнять оптимизацию двух типов параметров трехмерной позиции Tj (→) источника 12 излучения и трехмерных позиций Xi (→) маркеров MK с использованием способа оптимизации, называемого оптимизация сгустка частиц. Оптимизация сгустка частиц представляет собой способ оптимизации, который имитирует поведение большой группы насекомых, и способ поиска оптимальных позиций при обновлении позиций и скорости частиц во время связи между частицами, побуждая частицы получать информацию о позиции и скорости в пространстве поиска. Хотя предполагается, что позиция и направление детектора 13 известны в настоящем варианте осуществления, когда предполагается, что трехмерная позиция источника 12 излучения известна, второе устройство 122b получения данных может использовать центральную позицию Cj (→) плоскости обнаружения детектора 13 (центральная позиция прозрачного изображения TI), базовый вектор Rj (→) и трехмерные позиции Xi (→) маркеров MK в качестве параметров, подлежащих оптимизации. Таким образом, позиция каждого устройства формирования изображения, предусмотренного на поворотном гантри G, может быть оценена, даже когда известными параметрами являются любое из позиций детекторов 13 или источников 12 излучения. Известными параметрами могут быть любое из позиций и направлений детекторов 13 и позиции источников 12 излучения или параметры, соответствующие их комбинациям.
Затем второе устройство 122b получения данных дает команду памяти 130 сохранять полученные трехмерные позиции Tj (→) источников 12 (12-1 и 12-2) излучения в качестве контрольных позиций источников 12 излучения, которые будут упоминаться в следующим и последующим процессах (этап S116). Соответственно, процесс по блок-схеме алгоритма заканчивается. Контрольные позиции источников 12 излучения представляют собой, например, параметры, к которым обращаются во время калибровки, выполняемой во втором цикле, более коротком, чем первый цикл. Второй цикл, например, длится примерно один день или несколько дней.
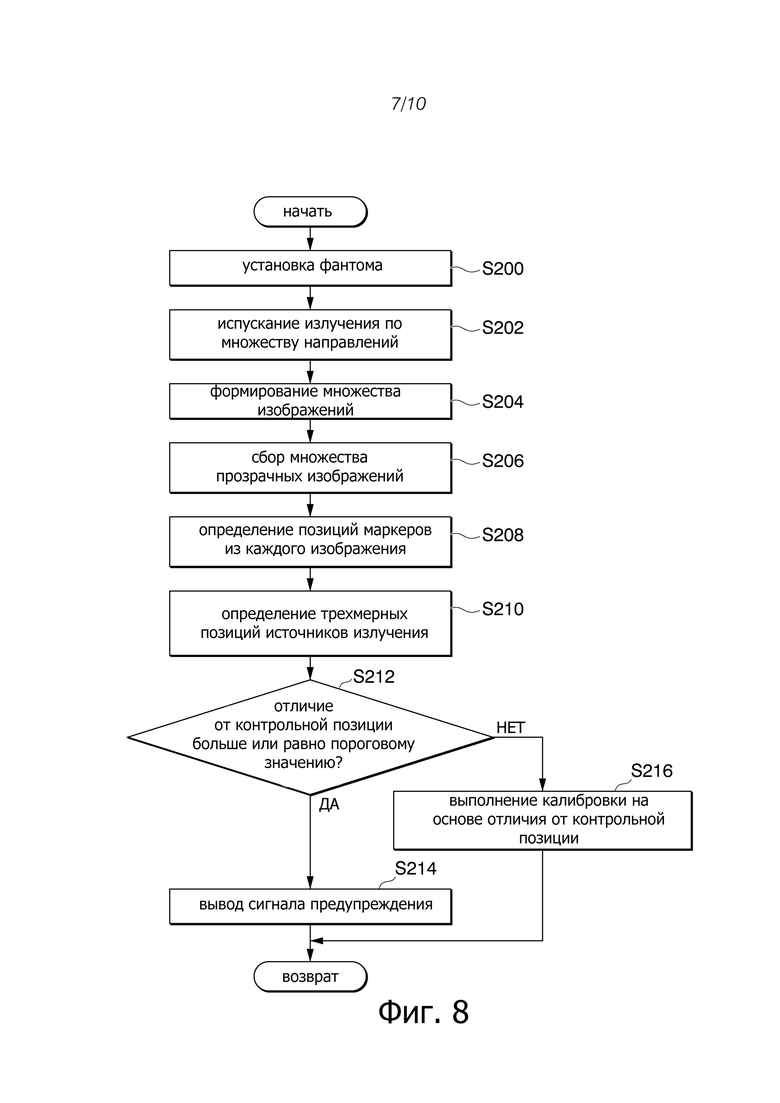
В дальнейшем калибровка, выполняемая во втором цикле, будет описана с использованием блок-схемы алгоритма. Фиг. 8 является блок-схемой алгоритма, показывающая другой пример обработки калибровки. Обработка по блок-схеме алгоритма повторно выполняется, например, во втором цикле.
Во-первых, медицинский работник или т.п. устанавливает фантом с четырьмя или более маркерами, встроенными в него, внутри поворотного гантри G, так что фантом проецируется на прозрачное изображение TI (этап S200).
Затем медицинский работник или другой сотрудник вводит информацию о завершении установки фантома в устройство 104 ввода. После приема этой информации контроллер 16 устройства для лечения устройства 10 для лечения выбирает два источника 12 излучения из множества источников 12 излучения и побуждает два выбранных источника 12 излучения излучать рентгеновские лучи во множестве разных направлений (этап S202).
Затем детекторы 13-1 и 13-2 генерируют прозрачные изображения TI фантома PH во множестве направлений (этап S204).
Затем первое устройство 112 сбора данных получает множество прозрачных изображений TI из детекторов 13-1 и 13-2 через коммуникатор 102 (этап S206).
Затем первое устройство 122a получения данных получает позиции маркеров MK относительно каждого из множества прозрачных изображений TI, полученных первым устройством 112 сбора данных (этап S208).
Далее, второе устройство 122b получения данных получает трехмерные позиции источников 12-1 и 12-2 излучения, которые являются неизвестными параметрами, на основании позиций маркеров MK, полученных из прозрачных снимков TI, и информации позиции, полученной вторым устройством 114 сбора данных (этап S210).
Затем калибратор 122c получает разность между трехмерными позициями источников 12-1 и 12-2 излучения, которые определены вторым устройством 122b получения данных, и контрольными позициями источников 12-1 и 12-2 излучения, сохраненными в памяти 130, и определяет, равна ли разность пороговому значению или превышает его (этап S212).
Когда известные параметры представляют собой трехмерные позиции источников 12-1 и 12-2 излучения, трехмерные позиции детекторов 13-1 и 13-2, определенные при калибровке в первом цикле, сохраняются как контрольные позиции и трехмерные направления их сохраняются в качестве контрольных направлений в памяти 130. В этом случае второе устройство 122b получения данных определяет трехмерные позиции и трехмерные направления детекторов 13-1 и 13-2, которые являются неизвестными параметрами, в качестве обработки данных на этапе S210. Соответственно, когда известные параметры представляют собой трехмерные позиции источников 12-1 и 12-2 излучения, калибратор 122c может получать разность между трехмерными позициями детекторов 13-1 и 13-2, определенными вторым устройством 122b получения данных и контрольных позиций и разность между трехмерными направлениями детекторов 13-1 и 13-2, определенными вторым устройством 122b получения данных, и контрольными направлениями и определять, равна ли каждая разность пороговому значению или превышает его.
Контроллер 120 вывода информации выводит для медицинского сотрудника, использующего устройство 10 лечения, сигнал предупреждения, который сигнализирует о необходимости выполнить техническое обслуживание, когда калибратор 122c определяет, что разность равна или превышает пороговое значение (этап S214).
Например, контроллер 120 вывода информации дает команду дисплею 106 отображать изображение, как показано на фиг. 9, в качестве примера сигнала тревоги. Фиг. 9 является схемой, показывающей пример экрана, отображаемого на дисплее 106. Как и в проиллюстрированном примере на экране дисплея 106 может отображаться текст или изображение, сигнализирующее о необходимости техобслуживания.
Контроллер 120 вывода информации может выводить уведомление почтового сообщения для запроса техобслуживания в оконечное устройство 20 в качестве сигнала тревоги через коммуникатор 102.
Между тем калибратор 122c выполняет калибровку на основании отличий от контрольных позиций (или контрольных направлений) после определения того, что разность меньше порогового значения (этап S216).
Например, калибратор 122c может использовать разности с контрольными позициями (или контрольными направлениями) в качестве величины коррекции и выполнять геометрическое преобразование, например аффинное преобразование, в качестве калибровки рентгенограммы DRR на основе величины коррекции. Калибратор 122c может выполнять аффинное преобразование прозрачных изображений TI в качестве калибровки вместо или в дополнение к использованию разностей от контрольных позиций (или контрольных направлений) в качестве величины коррекции и выполнения аффинного преобразования DRR на основании величины коррекции.
Калибратор 122c может использовать разность от контрольных позиций (или контрольных направлений) как величину коррекции и параметры коррекции, к которым обращаются, когда DRR формируется на основании величины коррекции в качестве калибровки. Параметры включают в себя, например, позицию и направление каждого устройства формирования изображения, предусмотренного на поворотном гантри G. Более конкретно, вышеупомянутые параметры включают в себя позиции и/или направления детекторов 13-1 и 13-2 и позиции источников 12 излучения.
Когда устройство 10 для лечения включает в себя механизм регулировки, который автоматически управляет позициями источников 12 излучения и детекторов 13, калибратор 122c может регулировать позицию и направление каждого устройства формирования изображения, управляя механизмом регулировки. Посредством такой калибровки можно формировать DDR с высокой точностью.
Хотя устройство 10 для лечения представляет собой устройство для лечения, использующее поворотное гантри G в приведенном выше описании, настоящее изобретение этим не ограничивается. Например, устройство 10 для лечения может быть устройством для лечения, в котором позиции устройств формирования изображения, таких как источники 12 излучения, являются фиксированными (тип фиксированного порта).
При наличии статистических данных, в которых ошибка повторного проецирования мала в определенном направлении и велика в определенном направлении, процессор 122 калибровки может выполнять калибровку на основании прозрачных изображений TI, захваченных в направлении, в котором ошибка повторного проецирования уменьшается.
Согласно вышеописанному первому варианту осуществления, можно откалибровать систему формирования изображения устройства 10 для лечения с высокой точностью, даже когда трехмерные позиции маркеров MK неизвестны или известные трехмерные позиции маркеров MK включают в себя ошибку, на поворотном гантри G, включающий в себя один или несколько источников 12 излучения, которые излучают излучение на конкретный объект во множестве различных направлений, и множество детекторов 13, которые обнаруживают излучение, излучаемое источниками 12 излучения на различных позициях, в качестве устройств формирования изображения, первое устройство 112 сбора данных, которое получает множество прозрачных изображений TI на основании излучения, обнаруженного множеством детекторов 13, второе устройство 114 сбора данных, которое получает информацию о позиции источников 12 излучения или детекторов 13, первое устройство 122a получения данных, которое получает позиции маркеров MK в фантоме PH в каждом из множества прозрачных изображений TI, полученных первым устройством 112 сбора данных, второе устройство 122b получения данных, который получает трехмерную позицию и т.п. устройства формирования изображения, для которого информация о позиции не была получена на основании позиций маркеров MK в прозрачных изображениях TI, полученных первым устройством 122a получения данных и трехмерных позиций источников 12 излучения или трехмерных позиций и трехмерных направлений детекторов 13, представленные информацией о позиции, полученной вторым устройством 114 сбора данных, и калибратор 122c, который выполняет калибровку поворотного гантри G на основании результата получения второго устройства 122b получения данных. В результате возможно определять позицию объекта исследования с высокой точностью и с высокой точностью отслеживать мишень во время обработки.
Как правило, при проведении лучевой терапии необходимо правильно направить излучение достаточной мощности на пораженную часть пациента. Соответственно, позиция пациента определяется путем сравнения изображения пациента, полученного при планировании лечения, с изображением пациента, полученным при излучении излучения, и относительно пораженной части, которая перемещается из-за дыхания, пораженная часть отслеживается с помощью прозрачных изображений TI в соответствии с Х-лучами после позиционирования и излучением на нее. Чтобы позиционировать пациента и выполнять отслеживание пораженной части с высокой точностью, система визуализации должна быть откалибрована. Однако, когда трехмерные позиции маркеров MK неизвестны или известные трехмерные позиции маркеров MK содержат ошибку, возможны случаи, в которых позиция объекта исследования не может быть определена с высокой точностью или мишень не может быть отслежена с высокой точностью.
В частности, когда выполняется калибровка, в известных трехмерных позициях маркеров MK легко генерируется большая ошибка, чем предполагалось, поскольку в рамке устанавливается фантом PH и отображается. Например, в случае устройства для лечения, в котором поворотный гантри G не используется и позиции устройств формирования изображения, таких как источники 12 излучения и т.п., являются фиксированными, возможно, что будет установлена рамка в форме прямоугольного параллелепипеда на полу процедурного кабинета, и фантом PH расположен на рамке. Однако в случае устройства 10 для лечения, использующего поворотный гантри G, как в настоящем варианте осуществления, есть случаи, в которых трудно установить рамку в форме прямоугольного параллелепипеда на полу, поскольку источники 12 излучения расположены на полу процедурного кабинета. Соответственно, возможны случаи, когда L-образная рамка устанавливается на позиции, отделенной от позиций, на которых, например, расположены источники 12 излучения. Здесь L-образная рамка установлена на полу таким образом, что одна сторона L-образных краев заземлена на пол и другая сторона не закреплена. Например, фантом PH расположен на краю на незакрепленной стороне между краями L-образной рамки. В L-образной рамке из-за момента силы могут возникать незначительные искажения, такие как деформация края на незакрепленной стороне в вертикальном направлении. В таком случае ошибка в позиции фантома PH легко становится больше, чем первоначально предполагаемая ошибка. С другой стороны, даже когда фантом PH расположен на столе 11 или т.п. без подготовки рамки, погрешность размеров и т.п. кронштейна 11a, соединенного от пола со столом, интегрированы и, таким образом, ошибка в позиции PH фантома легко становится больше, чем предполагалось изначально. Таким образом, легко возникает ошибка в позиции фантома PH, когда фантом PH установлен в процедурном кабинете. Когда возникает ошибка в позиции фантома PH, трехмерное позиция и трехмерные направления детекторов 13 и трехмерные позиции источников 12 излучения также включают в себя ошибки и, таким образом, точность калибровки легко снижается.
Напротив, в настоящем варианте осуществления трехмерная позиция любого устройства формирования изображения, предусмотренного на поворотном гантри G, измеряется заранее с использованием лазерного трекера и, таким образом, может быть получена неизвестная трехмерная позиция устройства формирования изображения даже, если позиции маркеры МК неизвестны. В результате можно с высокой точностью откалибровать систему формирования изображения устройства 10 для лечения, определить позицию объекта исследования с высокой точностью и отслеживать мишень с высокой точностью.
Вышеописанное устройство 100 обработки медицинских снимков может быть реализовано посредством обычного устройства, включающего в себя процессор, такой как CPU или GPU, и запоминающее устройство, такое как ROM, RAM, HDD или флэш-память, запоминающее устройство, хранящее программу для побуждения процессора действовать в качестве поворотного гантри G, включающего в себя один или несколько источников 12 излучения, которые излучают излучение на конкретный объект во множестве различных направлений, и множество детекторов 13, которые обнаруживают излучение, излучаемое источниками 12 излучения на различных позициях как устройства формирования изображения, первое устройство 112 сбора данных, которое получает множество прозрачных изображений TI на основании излучения, обнаруженного множеством детекторов 13, второе устройство 114 сбора данных, которое получает информацию о позиции источников 12 излучения или детекторов 13, первое устройство 122a получения данных, которое получают позиции маркеров MK в фантоме PH в каждом из множества прозрачных изображений TI, полученных первым устройством 112 сбора данных, второе устройство 122b получения данных, которое получает трехмерную позицию и т.п. устройства формирования изображения, для которого не была получена информация о позиции, на основании позиций маркеров MK в прозрачных изображениях TI, полученных с помощью первого устройства 122a получения данных, и трехмерных позиций источники 12 излучения или трехмерные позиции и трехмерные направления детекторов 13, представленные информацией о позиции, полученной вторым устройством 114 сбора данных, и калибратором 122c, который выполняет калибровку поворотного гантри G на основании результата получения второго устройства 122b получения данных.
Второй вариант осуществления
Далее будет описан второй вариант осуществления. Второй вариант осуществления отличается от описанного выше первого варианта осуществления тем, что прозрачные изображения TI, которые являются мишенями определения позиции во время калибровки, выбираются на основании плана лечения пациента. В дальнейшем описание будет сосредоточено на отличиях от первого варианта осуществления, и описание общих моментов в первом и втором вариантах осуществления будет опущено. В описании второго варианта осуществления те же части, что и в первом варианте осуществления, обозначены теми же ссылочными позициями и описаны.
Фиг. 10 представляет собой схему, показывающую пример данных 134 плана лечения. Например, данные 134 плана лечения представляют собой информацию, в которой дата и время лечения ассоциированы с планом лечения, например, угол θ излучения лечебного пучка B, который излучался во время лечения для каждого пациента.
Первое устройство 122a получения данных во втором варианте осуществления выбирает прозрачное изображение TI, которое является мишенью, из которого будут получены позиции маркеров MK из множества прозрачных снимков TI, полученных первым устройством 112 сбора данных, и получают позиции маркеров MK в выбранном прозрачном изображении TI.
Например, когда время, в которое выполняется калибровка во втором цикле, установлено на раннее утро каждого дня, первое устройство 122a получения данных выбирает пациента, которому назначено лечение, после калибровки из множества пациентов, которым назначено лечение в плане обработки. Например, когда план лечения представляет собой план, показанный на фиг. 10, и время, в которое выполняется калибровка во втором цикле, представляет собой «раннее утро 1 июня 2020 г.», первое устройство 122a получения данных выбирает пациентов A, B и C, запланированных для лечения в этот день. Затем первое устройство 122a получения данных выбирает прозрачные изображения TI, которые являются мишенями, из которых будут определяться позиции маркеров MK на основании углов θ излучения лечебных лучей B, ассоциированные с выбранными пациентами A, B и C.
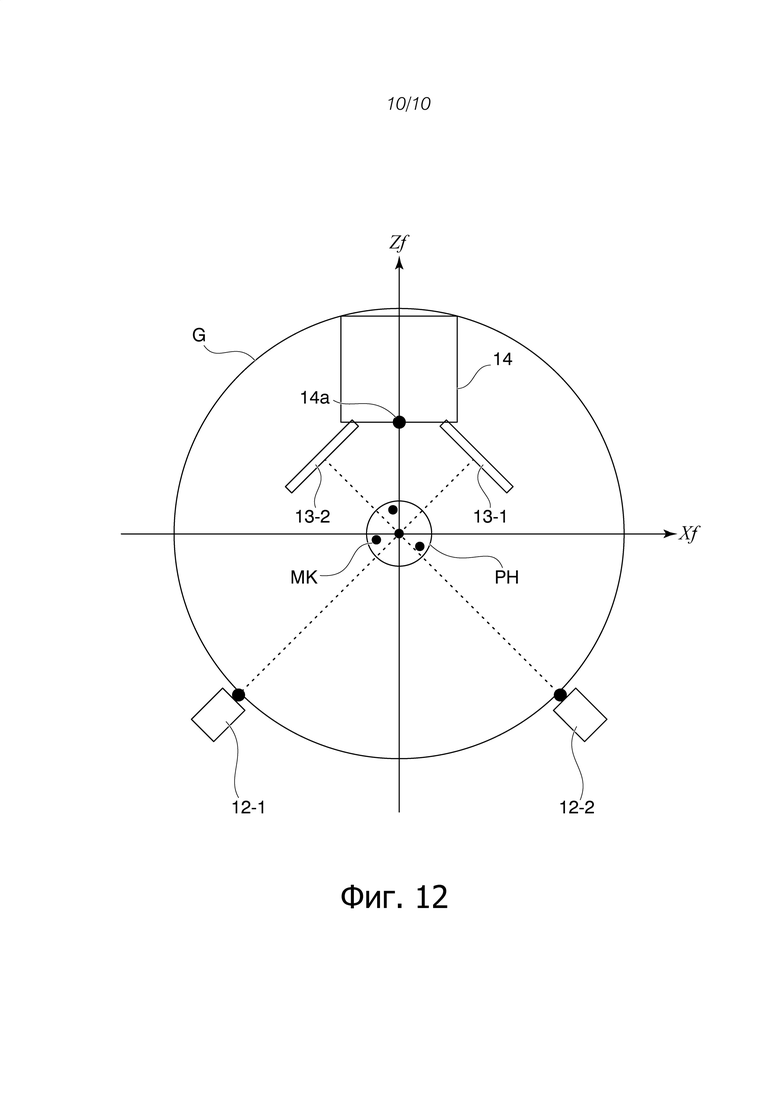
Фиг. 11 и фиг. 12 являются схемами, показывающими способ выбора прозрачного изображения TI на основе плана лечения. Например, когда угол между горизонтальным направлением Xf, которое проходит через центр оси вращения, и направлением излучения лечебного пучка B из излучающего окна 14 предполагается равным углу θ излучения лечебного пучка B в угле вокруг оси вращения поворотного гантри G, первое устройство 122a получения данных выбирает прозрачные изображения TI, сформированные на основе рентгеновских лучей, излучаемых от источников 12-1 и 12-2 излучения, когда поворотное гантри G поворачивается на угол θ. Например, в случае пациента A первое устройство 122a получения данных выбирает прозрачное изображение TI, захватывая маркеры MK в соответствии с Х-лучами, излучаемыми из источников излучения 12-1 и 12-2, когда фантом PH, включающий маркеры MK, расположен внутри поворотного гантри G и поворотное гантри G повернуто на угол, под которым лечебный пучок B излучается на пациента A справа сверху, как показано на фиг. 12, поскольку угол θ излучения лечебного пучка B равен 90°. Соответственно, можно пропустить калибровку в отношении направлений излучения лечебного пучка В, которые не используются для лечения в этот день.
В соответствии с вышеописанным вторым вариантом осуществления изобретения, можно сократить время, требующееся для калибровки, по сравнению со случаем, в котором выполняется всенаправленная калибровка в диапазоне 360°, потому что во время калибровки на основе плана лечения пациента выбираются прозрачные изображения TI, которые являются мишенями определения позиции.
Согласно по меньшей мере одному из вышеописанных вариантов, можно откалибровать систему формирования изображения устройства 10 для лечения с высокой точностью, даже когда трехмерные позиции маркеров MK неизвестны или известные трехмерные позиции маркеров MK включают погрешность, посредством поворотного гантри G, которое включает в себя в качестве устройств формирования изображения: один или более источников 12 излучения, которые испускают излучение на конкретный объект в различных направлениях (множество направлений), и множество детекторов 13, которые регистрируют излучение, испускаемое из источников 12 излучения, в различных позициях; первое устройство 112 сбора данных, которое собирает множество прозрачных изображений TI, сформированных на основе излучения, зарегистрированного множеством детекторов 13; второе устройство 114 сбора данных, которое собирает информацию о позиции источников 12 излучения или детекторов 13; первое устройство 122a определения данных, которое определяет позиции маркеров MK в фантоме PH в каждом из множества прозрачных изображений TI, полученных первым устройством 112 сбора данных; второе устройство 122b определения данных, которое определяет трехмерную позицию и т.п. устройства формирования изображения, для которого информация о позиции не была получена на основе позиций маркеров MK на прозрачных изображениях TI, определенных первым устройством 122a определения данных, и трехмерных позиций источников 12 излучения или трехмерных позиций и трехмерных направлений детекторов 13, представленных информацией о позициях, собранной вторым устройством 114 сбора данных; и калибратор 122c, который выполняет калибровку поворотного гантри G на основе полученного результата второго устройства 122b определения данных. В результате появляется возможность определять позицию объекта исследования с высокой точностью и отслеживать мишень во время лечения с высокой точностью.
Хотя были описаны конкретные варианты осуществления, эти варианты осуществления были представлены только в качестве примера и не предназначены для ограничения объема изобретения. Действительно, описанные новые варианты осуществления могут быть реализованы во множестве других форм; кроме того, без отхода от сущности изобретения могут быть сделаны различные упущения, замены и изменения в форме вариантов осуществления, описанных в данном документе. Сопроводительная формула изобретения и ее эквиваленты охватывают такие формы или модификации, которые находятся в рамках объема и сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ, СПОСОБ ОБРАБОТКИ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2019 |
|
RU2762146C1 |
| ВИЗУАЛИЗАЦИОННОЕ НАВЕДЕНИЕ ДЛЯ РАДИАЦИОННОЙ ТЕРАПИИ | 2015 |
|
RU2671513C1 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| ТОМОГРАФ С ГАММА-КАМЕРОЙ | 2024 |
|
RU2835777C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ФАЗОКОНТРАСТНОГО ИЗОБРАЖЕНИЯ С ПОДВИЖНОЙ РЕШЕТКОЙ(АМИ) | 2014 |
|
RU2663176C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ РАДИОАКТИВНОГО ПРЕПАРАТА ВНУТРИ ИССЛЕДУЕМОГО ОБЪЕКТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2349932C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ПОДЖЕЛУДОЧНОЙ ЖЕЛЕЗЫ ПУЧКОМ АДРОНОВ | 2011 |
|
RU2491107C2 |
| СПОСОБ ПРОВЕДЕНИЯ ОБЛУЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ МОЛОЧНОЙ ЖЕЛЕЗЫ ПУЧКОМ АДРОНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423156C2 |
| СПОСОБ КАЛИБРОВКИ НА ОСНОВЕ АЛГОРИТМА НАХОЖДЕНИЯ ЦЕНТРА ВРАЩЕНИЯ ДЛЯ КОРРЕКЦИИ КОЛЬЦЕВЫХ АРТЕФАКТОВ В НЕИДЕАЛЬНЫХ ИЗОЦЕНТРИЧЕСКИХ ТРЕХМЕРНЫХ ВРАЩАТЕЛЬНЫХ РЕНТГЕНОВСКИХ СКАНИРУЮЩИХ СИСТЕМАХ С ИСПОЛЬЗОВАНИЕМ КАЛИБРОВОЧНОГО ФАНТОМА | 2009 |
|
RU2526877C2 |
| СПОСОБ КОНФОКАЛЬНОЙ СКАНИРУЮЩЕЙ ТРЕХМЕРНОЙ МИКРОСКОПИИ И КОНФОКАЛЬНЫЙ СКАНИРУЮЩИЙ ТОМОГРАФИЧЕСКИЙ МИКРОСКОП | 1999 |
|
RU2140661C1 |






Группа изобретений относится к медицине. Система для лечения включает в себя систему формирования изображения, содержащую один или более источников излучения и множество детекторов, первое устройство сбора данных, второе устройство сбора данных, первое устройство получения данных, второе устройство получения данных и калибратор. Источники излучения испускают излучение на объект во множестве различных направлений. Множество детекторов регистрируют излучение в различных позициях. Первое устройство сбора данных собирает изображения на основе излучения. Второе устройство сбора данных собирает позиционную информацию о первом устройстве формирования изображения в трехмерном пространстве. Первое устройство получения данных определяет позицию объекта в изображениях. Второе устройство получения данных определяет позицию второго устройства формирования изображения в трехмерном пространстве на основе позиции объекта в изображениях, позиции первого устройства формирования изображения и т.п. Калибратор выполняет калибровку системы формирования изображения на основе результата определения второго устройства получения данных. Применение данной группы изобретений позволит определять с высокой точностью позицию объекта исследования и отслеживать мишень с высокой точностью. 4 н. и 10 з.п. ф-лы, 12 ил.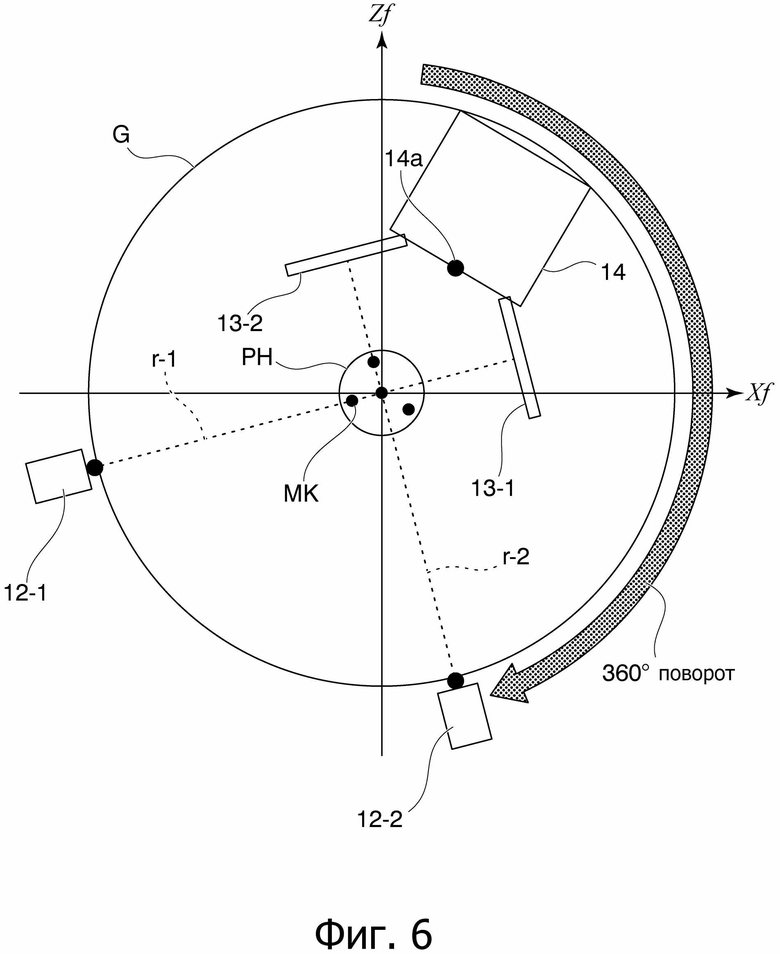
1. Устройство для определения позиции объекта исследования в виде опухоли, содержащее:
систему формирования изображения, содержащую в качестве устройств формирования изображения один или более источников излучения, выполненных с возможностью испускания излучения к конкретному объекту по различным направлениям, и детекторы, выполненные с возможностью регистрации излучения, излучаемого из источников излучения, в различных позициях;
первое устройство сбора данных, выполненное с возможностью сбора изображений на основе излучения, регистрируемого указанными детекторами;
второе устройство сбора данных, выполненное с возможностью сбора позиционной информации, представляющей позицию и/или направление первого устройства формирования изображения, содержащегося в системе формирования изображения, в трехмерном пространстве, в котором расположена указанная система формирования изображения;
первое устройство получения данных, выполненное с возможностью определения позиции указанного объекта в каждом из изображений, собранных первым устройством сбора данных;
второе устройство получения данных, выполненное с возможностью определения позиции и/или направления второго устройства формирования изображения, содержащегося в указанной системе формирования изображения, в трехмерном пространстве на основе позиции указанного объекта на изображениях, определенной первым устройством получения данных, а также на основе данных позиции или направления первого устройства формирования изображения, представленных в позиционной информации, собранной вторым устройством сбора данных; и
калибратор, выполненный с возможностью выполнения калибровки указанной системы формирования изображения на основе результата, определенного вторым устройством получения данных.
2. Устройство по п. 1, в котором система формирования изображения установлена на поворотном гантри, и устройство содержит контроллер излучения, который выполнен с возможностью давать команду поворотному гантри поворачиваться и давать команду источникам излучения испускать излучение при изменении позиций источников излучения по отношению к указанному объекту.
3. Устройство по п. 1 или 2, в котором указанный объект содержит четыре или более маркера, при этом по меньшей мере один из указанных четырех или более маркеров находится во второй плоскости, отличной от первой плоскости, в которой находятся другие три или более маркера, в трехмерном пространстве в указанном объекте.
4. Устройство по любому из пп. 1-3, в котором второе устройство получения данных выполнено с возможностью также определения позиции указанного объекта в трехмерном пространстве на основе указанной позиции объекта в указанных изображениях, определенной первым устройством получения данных, и на основе данных позиции или направления первого устройства формирования изображения, представленных позиционной информацией, собранной вторым устройством сбора данных.
5. Устройство по любому из пп. 1-4, в котором первое устройство получения данных выполнено с возможностью выбора изображения, которое является мишенью, из которого определяется позиция объекта, из указанных изображений, собранных первым устройством сбора данных, на основе плана лечения, ассоциированного с направлением излучения лечебного пучка, излучаемого источником лечебного пучка для каждого объекта исследования, и с возможностью определения позиции объекта в выбранном изображении.
6. Устройство по п. 5, в котором первое устройство получения данных выполнено с возможностью выбора объекта исследования, на который запланировано излучение лечебного пучка после калибровки системы формирования изображения, из объектов исследования, для которых запланировано излучение лечебного пучка в плане лечения,
при этом из указанных изображений, собранных первым устройством сбора данных, в качестве изображения, которое является мишенью и из которого определяется позиция указанного объекта, выбирается изображение на основе излучения, испускаемого в том же направлении, что и направление излучения лечебного пучка, ассоциированного с выбранным объектом исследования.
7. Устройство по любому из пп. 1-6, дополнительно содержащее процессор изображений, выполненный с возможностью формирования виртуального двухмерного изображения при наблюдении в определенном ракурсе на основе трехмерных изображений, причем виртуальное двухмерное изображение получают путем упорядочивания изображений на основе излучения, зарегистрированного детекторами в направлении излучения,
при этом калибратор выполнен с возможностью выполнения в качестве калибровки геометрического преобразования двумерного изображения, сформированного процессором изображения, на основе указанного результата определения второго устройства получения данных.
8. Устройство по любому из пп. 1-6, в котором калибратор выполнен с возможностью выполнения в качестве калибровки геометрического преобразования изображений, собранных первым устройством сбора данных, на основе указанного результата определения второго устройства получения данных.
9. Устройство по любому из пп. 1-6, дополнительно содержащее процессор изображения, выполненный с возможностью формирования виртуального двухмерного изображения при наблюдении в определенном ракурсе на основе трехмерных изображений, виртуальное двухмерное изображение получают путем упорядочивания изображений на основе излучения, зарегистрированного детекторами в направлении излучения,
при этом калибратор выполнен с возможностью выполнения в качестве калибровки коррекции параметров, к которым происходит обращение, когда процессор изображения формирует указанное двумерное изображение на основе указанного результата определения второго устройства получения данных.
10. Устройство по любому из пп. 1-6, дополнительно содержащее:
устройство вывода, выводящее информацию; и
контроллер вывода, выполненный с возможностью управления устройством вывода для вывода информации для запроса в оконечное устройство пользователя корректировки позиции или направления указанной системы формирования изображения, указанный пользователь выполняет техобслуживание системы формирования изображения, когда первая разность или вторая разность больше или равна пороговому значению, при этом первая разность представляет собой разность между позицией второго устройства формирования изображения в трехмерном пространстве, определяемой вторым устройством получения данных, и контрольной позицией, а вторая разность представляет собой разность между направлением второго устройства формирования изображения в трехмерном пространстве, определяемым вторым устройством получения данных, и контрольным направлением.
11. Устройство по п. 10, в котором второе устройство получения данных выполнено с возможностью неоднократного определения позиции и/или направления второго устройства формирования изображения в трехмерном пространстве в первом цикле и во втором цикле, который короче первого цикла, при этом
контрольная позиция является позицией второго устройства формирования изображения в трехмерном пространстве, определяемой вторым устройством получения данных в первом цикле,
контрольное направление является направлением второго устройства формирования изображения в трехмерном пространстве, определяемым вторым устройством получения данных в первом цикле,
первая разность представляет собой разность между позицией второго устройства формирования изображения в трехмерном пространстве, определяемой вторым устройством получения данных во втором цикле, и контрольной позицией, и
вторая разность представляет собой разность между направлением второго устройства формирования изображения в трехмерном пространстве, определяемым вторым устройством получения данных во втором цикле, и контрольным направлением.
12. Способ калибровки устройства для определения позиции объекта исследования в виде опухоли, выполняемый с помощью компьютера, выполненного с возможностью управления системой формирования изображения, содержащей в качестве устройств формирования изображения один или более источников излучения, которые выполнены с возможностью испускания излучения на конкретный объект в различных направлениях, и детекторы, выполненные с возможностью регистрации излучения, испускаемого из источников излучения, в различных позициях, указанный способ калибровки характеризуется тем, что
собирают изображения на основе излучения, зарегистрированного детекторами;
собирают позиционную информацию, представляющую позицию и/или направление первого устройства формирования изображения, содержащегося в системе формирования изображения, в трехмерном пространстве, в котором расположена система формирования изображения;
определяют позицию указанного объекта в каждом из собранных изображений;
определяют позицию и/или направление второго устройства формирования изображения, содержащегося в системе формирования изображения, в трехмерном пространстве на основе позиции указанного объекта в полученных изображениях и на основе позиции или направления первого устройства формирования изображения, которые представляют собой указанную собранную позиционную информацию; и
выполняют калибровку системы формирования изображения на основании определенной позиции или определенного направления второго устройства формирования изображения в трехмерном пространстве.
13. Носитель информации с сохраненной программой для инициирования компьютера устройства для определения позиции объекта исследования в виде опухоли, который управляет системой формирования изображения, содержащей в качестве устройств формирования изображения один или более источников излучения, выполненных с возможностью испускания излучения на конкретный объект в различных направлениях, и детекторы, выполненные с возможностью регистрации излучения, испускаемого из источников излучения, в различных позициях, чтобы компьютер выполнял:
процесс сбора изображений на основе излучения, зарегистрированного детекторами;
процесс сбора позиционной информации, представляющей позицию и/или направление первого устройства формирования изображения, содержащегося в системе формирования изображения, в трехмерном пространстве, в котором расположена система формирования изображения;
процесс определения позиции объекта в каждом из собранных изображений;
процесс определения позиции и/или направления второго устройства формирования изображения, содержащегося в системе формирования изображения, в трехмерном пространстве на основе позиции объекта в полученных изображениях и позиции или направления первого устройства формирования изображения, которые представлены указанной собранной позиционной информацией; и
процесс выполнения калибровки системы формирования изображения на основе указанной определенной позиции или указанного определенного направления второго устройства формирования изображения в трехмерном пространстве.
14. Система для лучевой терапии, содержащая
стол для фиксации пациента,
источник лечебного пучка, выполненный с возможностью направления лечебного пучка к пациенту в различных направлениях, и
устройство для определения позиции объекта исследования в виде опухоли по любому из пп.1-11.
| US 20170361128 A1, 21.12.2017 | |||
| СИСТЕМА ПЛАНИРОВАНИЯ ЛУЧЕВОЙ ТЕРАПИИ И ПОСЛЕДУЮЩЕГО НАБЛЮДЕНИЯ С ШИРОКОКАНАЛЬНОЙ РАДИУНОКЛИДНОЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ ИЛИ ШИРОКОКАНАЛЬНОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИЕЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ | 2011 |
|
RU2587077C2 |
| US 20130215249 A1, 22.08.2013. | |||

