Изобретение относится к манипуляторам, в частности к роботизированным хирургическим системам, предназначенным для выполнения минимально инвазивных вмешательств на сердце человека. Система служит для манипулирования движением транскатетерных систем протезирования клапана аорты (TAVR) во время процедуры имплантации.
Малоинвазивные методики лечения сосудистых патологий -стентирование коронарных артерий, установка окклюдирующих устройств, проведение ультразвуковых устройств визуализации, имплантация электродов кардиостимуляторов, основанные на введении их через катетеры без массивных открытых хирургических доступов, получили значительное распространение в клинической практике, зачастую, став доминирующими. Так, например, стентирование коронарных артерий стало «золотым стандартом» лечения ишемической болезни сердца, значительно потеснившим открытое хирургическое аортокоронарное шунтирование. С ростом количества эндоваскулярных вмешательств - стентирований, ангиопластик, аблаций в мире наблюдается рост вариантов улучшения результатов, исходов подобных операций за счет использования вспомогательных, ассистирующих технологий. Одним из вариантов подобных технологий стало внедрение роботизированных систем, которые решают проблему длительного нахождения врача в рентген-операционной при проведении малоинвазивной сосудистой операции и воздействия рентгеновского излучения на него. Использование специализированных манипуляторов в стерильной зоне дистанцирует врача от воздействия данного фактора, что снижает его вред и, потенциально, повышает производительность труда. Успешность подобного роботизированного подхода продемонстрирована на описанных процедурах, что сделало возможным дальнейшую трансляцию его на более сложную, по сравнению со стентированием операцию - транскатетерное протезирование клапана аорты (TAVR). Принцип такого вмешательства схож - проведение доставочного устройства (катетера) через сосудистую систему человека до области имплантации. В катетере содержится кримпированный (сжатый до малого диаметра) протез, который, после достижения области клапана аорты имплантируют, а катетер удаляют.
Транскатетерное протезирование клапанов сердца TAVR зарекомендовало себя в качестве высокоэффективного метода лечения клапанных патологий, благодаря чему, получило широкое распространение в современной интервенционной кардиологии. Эндоваскулярное протезирование аортального клапана применяют в случаях, если стандартное «открытое» вмешательство сопровождается высокими хирургическими рисками - прежде всего, интраоперационной летальности, обусловленной большим возрастом пациента, коморбидностью, тяжестью основного заболевания. Транскатетерное протезирования в таком случае остается единственным вариантом терапии пациентов с аортальным пороком, которые страдают тяжелыми сопутствующими заболеваниями: поражением сосудов, хроническими заболеваниями легких, печени, эндокринной патологией, онкологией.
Во время процедуры TAVR оператор (интервенционный кардиолог) подвержен значительной дозе рентгеновского излучения, вследствие значительной длительности вмешательства, а, следовательно, роботизированная система ассистирования способна реализовать свои преимущества в полной мере - дистанцировать специалиста от воздействия фактора излучения. Кроме того, ряд исследований показывает, что точность позиционирования TAVR-протеза в анатомическую область обуславливает исход процедуры в целом за счет снижения риска специфических осложнений, характерных для данных вмешательств - парапротезной регургитации, блокады левой ножки пучка Гиса. Повысить точность позиционирования также способны роботизированные системы, быстро реагирующие на возможные спонтанные движения пациента во время имплантации и не подверженные усталости в ходе длительного вмешательства.
В целом, роботизированная хирургия начала свое развитие в девяностых годах прошлого века с апробации в сердечно-сосудистой малоинвазивной системы с эндоскопическим доступом двух серийно выпускаемых роботизированных систем - «DA VINCI» (Intuitive Surgical Inc., США) и «ZEUS» (Computer Motion Inc., США). Хирургическая система, «DA VINCI», описана в патентах US 6,659,939; US 6,837,883 и других патентных документах того же самого патентообладателя. Хирургическая система, «ZEUS» - в патентах US 6,102,850; US 5,855,583; US5,762,458; US 5,515,478 и другой патентной литературе. Данные роботизированные установки с телеуправлением позволяют контролировать хирургическое вмешательство либо напрямую из операционного зала, либо из удаленного местоположения, используя обратный визуальный контроль на панели управления. Обе системы были разработаны специально для кардиохирургии, в которой топологическая анатомия постоянна, рабочее место мало, и поэтому точность движения инструмента и манипуляционные возможности требуются только в ограниченном пространстве. Для того, чтобы увеличить возможность движения и перемещения в данном ограниченном пространстве, для использования с каждой из этих систем соответственно был разработан обширный диапазон узкоспециальных инструментов, которые предлагают одну или более дополнительных степеней свободы на кончике инструмента.
Наибольшее распространение роботизированный подход получил в абдоминальной хирургии и урологии, что привело к созданию целой серии хирургических систем.
Известна группа изобретений для роботизированных лапароскопических и лапаротомических вмешательств с возможностью удаленного управления, выполненных в виде узкоспециализированной роботизированной руки, управляющей медицинским инструментом (Патент РФ №2412799 С2, «Медицинская роботизированная система», дата публикации: 10.03.2010; Патент РФ №2412800 С2 «Роботизированная хирургическая система для выполнения минимальных инвазивных вмешательств», дата публикации: 10.03.2010; Патент РФ №2518806 С2, «Роботизированная хирургическая система минимального инвазивного вмешательства и способ ее управления», дата публикации: 10.12.2013; Патент РФ №2704961 С2, «Устройство для робот-ассистированной хирургии», дата публикации: 27.12.2018). Конструктивно устройства содержат по меньшей мере одну роботизированную руку, блоки связи и пульт управления в различных исполнениях. Роботизированная рука обеспечивает значительное количество степеней свободы (до 6) за счет шарнирного исполнения и, следовательно, значительную подвижность и маневренность, сравнимую с движениями рук хирурга. Посредством гнезда и серии переходников роботизированная рука обеспечивает типичный интерфейс (удержание) для широкого разнообразия существующих лапароскопических и лапаротомических инструментов стандартного типа, разработанных для ручного (не роботизированного) вмешательства. За счет системы создания обратных связей - по ускорению (акселерометр), силе (датчик силы), а также возможности обеспечить имитацию тактильных ощущений на пульте управления, система реализует контуры безопасности своего применения. В целом, описанные в данной группе изобретений роботизированные системы предназначены для внутриполостных вмешательств, в основном - на органах брюшной полости: диагностических (лапароскопия) и хирургических (лапаротомия).
Недостатком данного технического решения является невозможность использовать систему для транскатетерных устройств при вмешательствах на сосудистой системе - стентирований, TAVR и др., для которых необходимо обеспечить совместимость с катетерами, специфическими проводниками и портами (интродьюсером).
Предположительно, концепция роботизированных систем с широкими возможностями - большое количество степеней свободы, подвижность в большом рабочем пространстве, сменные инструменты - избыточна для катетерных вмешательств. Данные процедуры требуют продольного перемещения катетера, незначительного наклона, поворота, что делает, с одной стороны, такие роботы менее требовательными к характеристикам, с другой -менее универсальными, адаптированными только для работ с катетерами. Поэтому дальнейшим вектором развития ассистирующих роботизированных систем стала глубокая специализация на работе с отдельными процедурами - малоинвазивными транскатетерными. Именно такой концепции придерживается перечень следующих запатентованных роботизированных устройств и заявленная роботизированная система транскатетерного протезирования клапана аорты.
Известна более профильная роботизированная система для осуществления полуавтоматических малоинвазивных вмешательств на сосудистой системе человека - стентировании коронарных артерий (Патент США US 2021/0100980 A1, «System for guide catheter control with introducer connector», дата публикации: 08.04.2021). Система состоит из основного блока манипулирования катетером и блока управления основным блоком, с которым работает оперирующих кардиолог, удаленный из стерильной зоны и не подвергаемый действию рентгеновского излучения. Система предусматривает полуавтоматическое осуществление процедуры стентирования, начиная от этапа заведения баллонного катетера со стентом по стандартному 3,5-дюйма проводнику. Работая манипуляторами системы управления, кардиолог способен поворачивать и линейно перемещать баллонный катетер, таким образом позиционируя его в необходимое место имплантации. Механическая часть (основной блок манипулирования) представлен «кассетой» для загрузки баллонного стентирующего катетера и линейным приводом, который осуществляет линейное перемещение «кассеты» в ответ на управляющее воздействие кардиолога.
Недостатком данного технического решения является невозможность его использования для транскатетерного TAVR-протезирования - прежде всего, за счет невозможности быть соединенной с TAVR-системами доставки, которые конструктивно более габаритны и имеют более сложную эргономику.
Другим недостатком данного технического решения является отсутствие органов управления TAVR-системой доставки. Помимо линейного перемещения и позиционирования вдоль проводника, процедура TAVR подразумевает контролируемое высвобождение протеза клапана сердца из системы доставки в области клапана аорты, для чего кардиолог вращает различные элементы на ручке системы доставки - кольца, «шестеренки». Роботизированный катетер должен иметь конструктив для аналогичных действий - вращения данных элементов для высвобождения таким образом TAVR-протеза. Однако в описанном выше техническом решении подобного функционала нет.
Наиболее разработанной и апробированной с прикладной точки зрения системой является роботизированная установка для осуществления катетерных вмешательств Magellan (Патент США US 8827948 В2, «Steerable catheters», дата публикации: 09.09.2014). Система предназначена для осуществления стентирования артерий баллонными или самораскрывающимися стентами и проведения атерэктомии (удаления атеросклеротической бляшки из артерии); для установки окклюдирующих устройств малоинвазивными катетерными способами; для введения устройств ультразвуковой визуализации, электродов кардиостимулятора и т.д. Кроме того, используя данную систему возможно доставлять жидкости и субстанции - лекарства, контраст, кровь через катетерные доступы в необходимое место. При этом бассейнами для вмешательств могут быть коронарные артерии, почечные артерии, крупные участки аорты (грудной, абдоминальный отделы), подвздошные артерии, висцеральные (органные) артерии. В ряде случаев возможна адаптация данной системы для использования в пищеварительной (пищевод, желудок, кишечник, печень), мочевыводящей, дыхательной системе.
Конструктивно, роботизированная система состоит из трех блоков, которые могут иметь различное исполнение, но выполняют в каждом из вариантов собственные, строго профильные функции: блок роботизированного катетера; блок управления; рабочее место оператора. Роботизированный катетер представлен набором механических и электронных компонентов, которые соединяют с основными медицинскими инструментами (катетерами) во время процедуры: в большинстве случаев это интродьюсер, обеспечивающий герметичные «ворота» в сосудистую систему пациента для дальнейших манипуляций и, непосредственно, катетерное устройство, осуществляющее лечебную или диагностическую процедуру (см. выше описание примеров процедур). Роботизированный катетер располагается в стерильной зоне проведения вмешательства.
Блок управления служит для обеспечения работы компонентов роботизированного катетера - питания и управления положением его двигателей и механических передач. Блок управления соединен проводами с рабочим местом оператора и с роботизированным катетером для передачи управляющего воздействия, однако частично провода могут быть заменены беспроводными интерфейсами. В ряде случаев блок управления может иметь подключение к другим системам, например, к установке рентгенологической визуализации (С-дуге).
Рабочее место оператора может быть представлено набором экранов, сенсорных дисплеев, пультов, клавиатур, роликов, колес, джойстиков и их различного сочетания, настраиваемого в зависимости от вмешательства и/или требований оператора. Неотъемлемым компонентом рабочего места оператора является пульт управления роботизированной системой, через который кардиолог может управлять работой роботизированного катетера.
Недостатком данного технического решения является отсутствие органов управления ручкой TAVR-системы доставки - невозможность вращать отдельные элементы (кольца, «шестеренки») ручки TAVR-системы доставки и, таким образом, осуществлять главное воздействие всей процедуры: высвобождение TAVR-протеза в области клапана аорты. Недостаток, аналогичный недостатку предыдущей системы. Именно поэтому данная роботизированная система не может быть использована для целевой процедуры - транскатетерного протезирования клапана аорты.
Наиболее близким к заявленному техническому решению является система для роботизированного ассистирования транскатетерных манипуляций в виде программно-аппаратного комплекса (Патент США US 2021/0068911 A1, «Robot-assisted driving systems and methods», дата публикации: 11.03.2021). Данная система также реализует описанные принципы роботизированного катетерного вмешательства - дистанцирование врача-кардиолога и снижение рентгенологической нагрузки на него, а также -повышение точности манипулирования медицинским малоинвазивным инструментом за счет механической компоненты. Система представлена гибким инструментом, подсистемой слежения, рабочей станцией пользователя, драйвером инструмента и контроллером. В различных вариантах осуществления данного технического решения гибкий инструмент включает проксимальную часть, дистальную часть и, по меньшей мере, один управляемый изгибающийся сегмент в дистальной части. Подсистема слежения включает в себя по меньшей мере один датчик слежения за положением, встроенный в дистальную часть гибкого инструмента, за счет которой осуществляется контроль положения кончика катетерного устройства. Пользовательская рабочая станция включает в себя устройство ввода (пульт управления) и экран дисплея. Драйвер инструмента функционально соединен с гибким инструментом и включает в себя двигатели и другое аппаратное обеспечение, сконфигурированное для вставки и втягивания гибкого инструмента и манипулирования по меньшей мере одним управляемым изгибающим сегментом. Контроллер обеспечивает электрическую (силовую и управляющую) связь между рабочей станцией и драйвером инструмента. В целом подобная универсализация системы - без однозначной привязки к конкретному катетерному вмешательству, позволяет осуществлять различные манипуляции на сердечно-сосудистой системе. Авторы приводят в качестве примеров возможность использовать катетерные инструменты для биопсии, эндоскопического исследования, стентирования, аспирации, а также транскатетерного протезирования клапана (TAVR).
Недостатком данного технического решения является отсутствие элементов и технических компонентов в составе драйвера инструмента, обеспечивающих работу с катетерной системой доставки TAVR, помимо вставки, втягивания и изгиба. Во время ключевого этапа имплантации TAVR-протеза кардиолог манипулирует поворотными кольцами или «шестеренками» ручки доставочной системы, благодаря чему осуществляет раскрытие протеза в целевой области. В текущей системе авторы не уточняют каким образом кардиолог выполняет данный набор манипуляций, являющийся наиболее критическим во всей процедуре.
Исходя из описанных предпосылок, целью заявляемого изобретения является создание конструктива роботизированной хирургической системы, осуществляющей перечень манипуляций при транскатетерном протезировании клапана аорты (TAVR). Роботизированная хирургическая система состоит из робота-манипулятора, который выполнен таким образом, что позволяет использовать транскатетерные системы протезирования клапана аорты и удаленно управлять процедурой их имплантации.
Техническим результатом предлагаемой роботизированной хирургической системы транскатетерного протезирования клапана аорты является создание устройства управления катетерными доставочными системами, реализующее этап контролируемого высвобождения транскатетерного протеза в целевой области имплантации - фиброзном кольце клапана аорты, во время малоинвазивного трансфеморального вмешательства.
Технический результат достигается за счет использования в конструкции заявленной системы блока предварительного позиционирования в виде направляющего рельса, по которому продольно передвигаются две каретки, движение которых может быть заблокировано путем закручивания барашковыми винтами в количестве не менее двух штук для каждой каретки, на каретки монтирован алюминиевый профиль, на который монтирован блок прецизионного позиционирования, содержащий шарико-винтовую передачу (ШВП) и базовую платформу, ШВП имеет площадку, которая выполнена с возможностью приведения в движение за счет работы электродвигателя, присоединенного муфтой к приводному механизму ШВП, на площадке ШВП расположена платформа основная, выполненная из жесткого негибкого материала, на которой расположена платформа поворотная, способная за счет системы роликов совершать контролируемый оборот вокруг центральной оси на 110 градусов по часовой и 110 градусов против часовой стрелки относительно исходного горизонтального положения, на платформе поворотной расположены такие элементы фиксации и манипулирования ручкой транскатетерной системы доставки как соединенные друг с другом ложе ручки системы доставки и прижим, которые обхватывают часть ручки и фиксируют ее от продольного перемещения, проворота вдоль своей оси и отклонения от продольной оси, на ручку системы доставки надето разъемное зубчатое колесо, соединенное с передаточной шестерней, которая является составной частью электродвигателя.
Сущность изобретения поясняется чертежами:
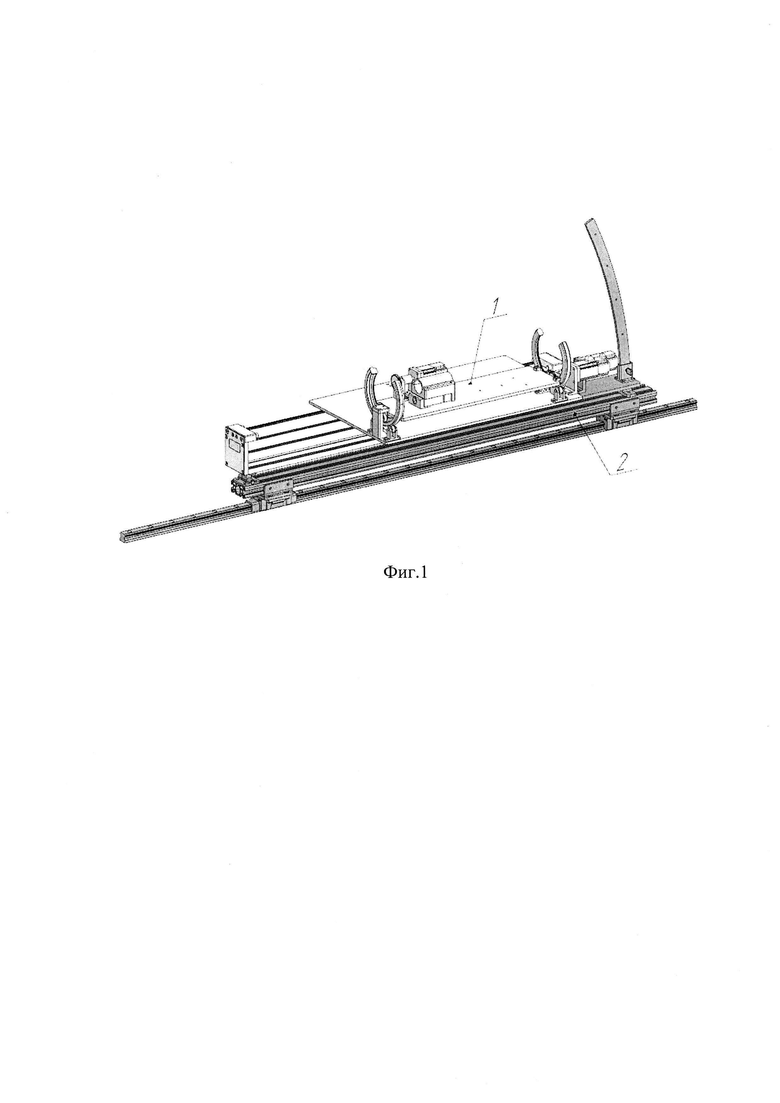
На фиг. 1 изображен общий вид роботизированной системы доставки, состоящей из двух конструктивных блоков, при этом 1 - блок предварительного позиционирования (условно обозначенный серым цветом), 2 - блок прецизионного позиционирования (белый).
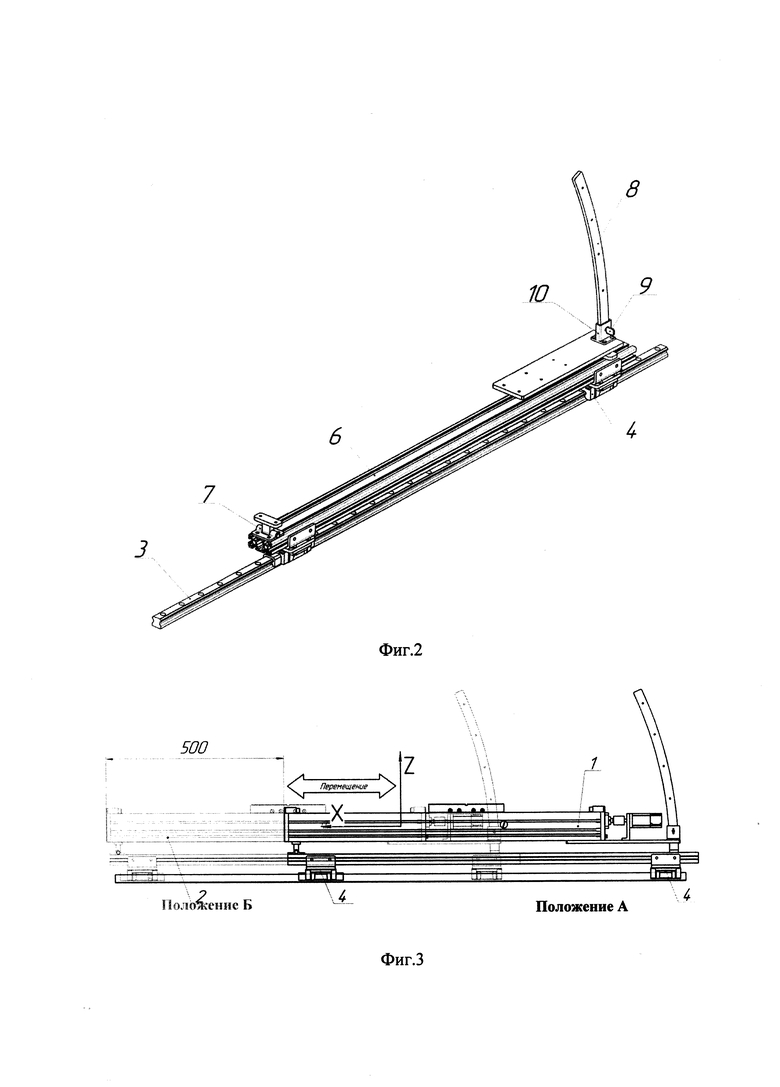
На фиг. 2 изображен отдельный вид блока предварительного позиционирования, где 3 - направляющий рельс, 4 - каретка, 6 - профиль алюминиевый, 7 - шарнир наклонный, 8 - дуга направляющая, 9 - винт стопорный, 10 - фиксатор.
На фиг. 3 изображены примеры двух положений ШВП 11: начальное (А) и смещенное (Б) на 500 мм относительно начального
На фиг. 4 представлена схема фиксации ШВП 11 при ограничении линейного перемещения, где 3 - направляющий рельс, 4 - каретка, 5 - винт барашковый, 6 - профиль алюминиевый, 11 - ШВП.
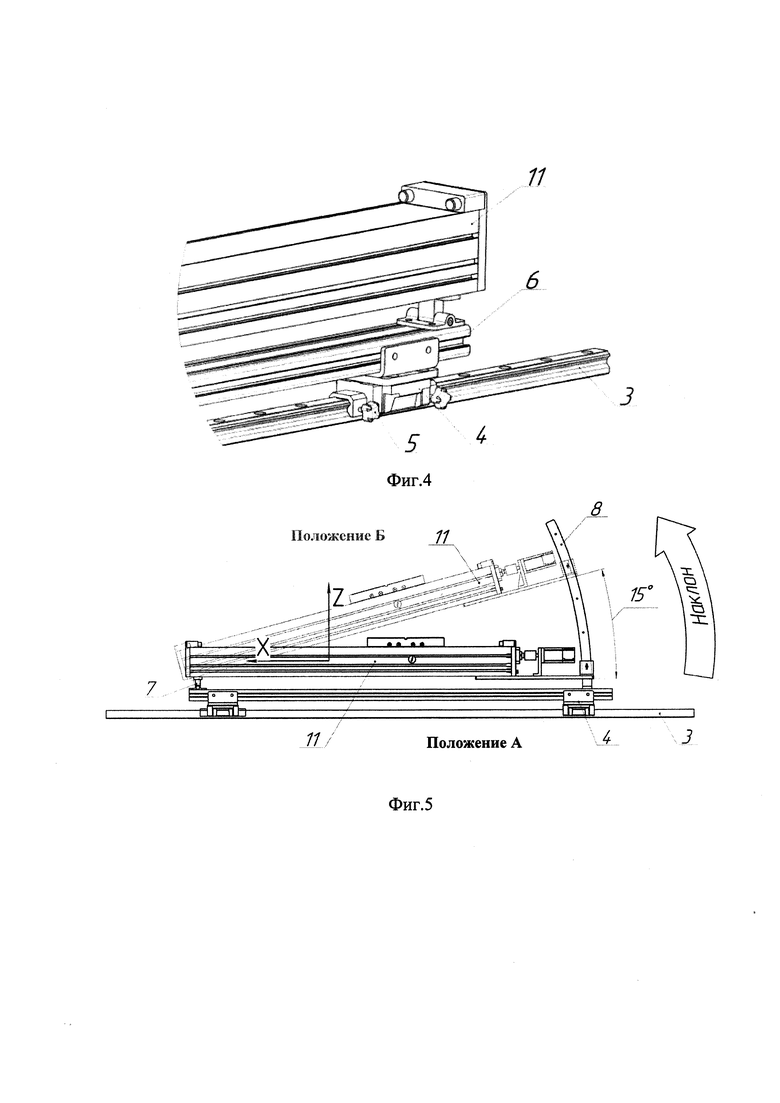
На фиг. 5 представлены два варианта углового расположения ШВП. Положение А: ШВП находится в горизонтальном положении 0 градусов; Положение Б: ШВП находится под углом 15 градусов (относительно исходного горизонтального).
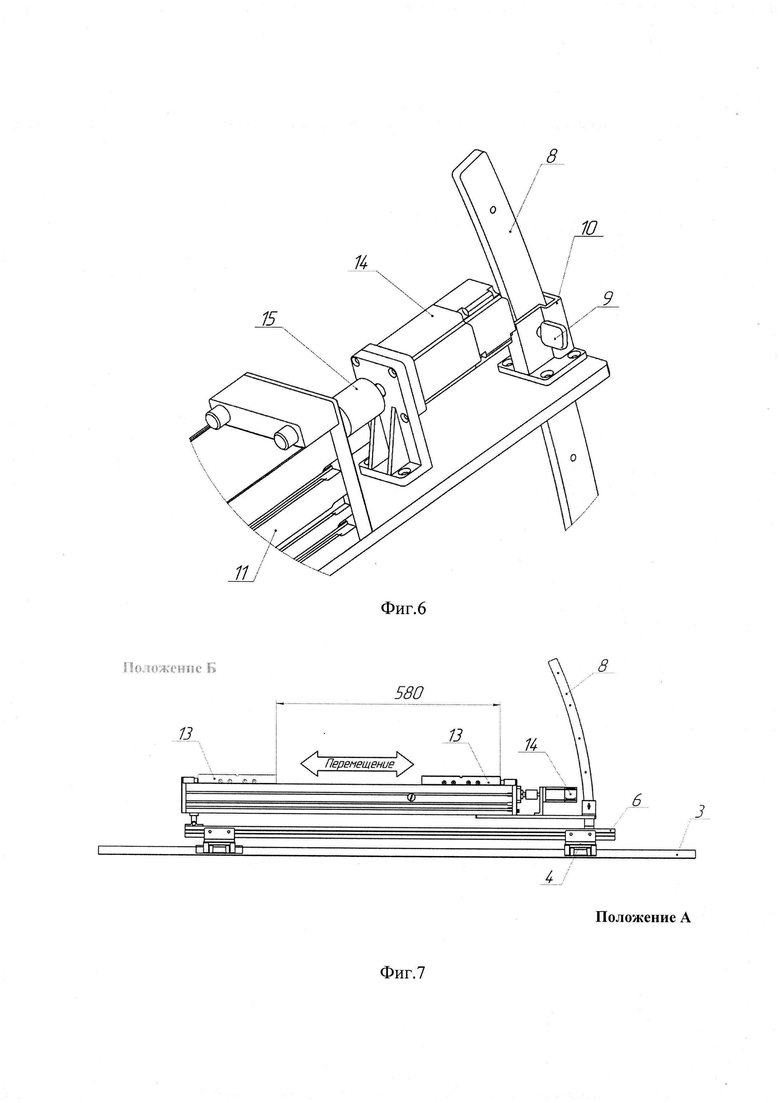
На фиг. 6 изображена схема фиксации углового перемещения ШВП 11, где 8 - направляющая дуга, 10 - фиксатор, 9 - стопорный винт, 14 - двигатель, 11 - ШВП, 15 - муфта.
На фиг. 7 представлены варианты расположения площадки ШВП. Положение А: площадка ШВП смещена в крайнее правое положении, до упора; Положение Б: площадка ШВП смещена вдоль продольной оси, в крайнее левое положение до упора, на максимальное расстояние (580 мм).
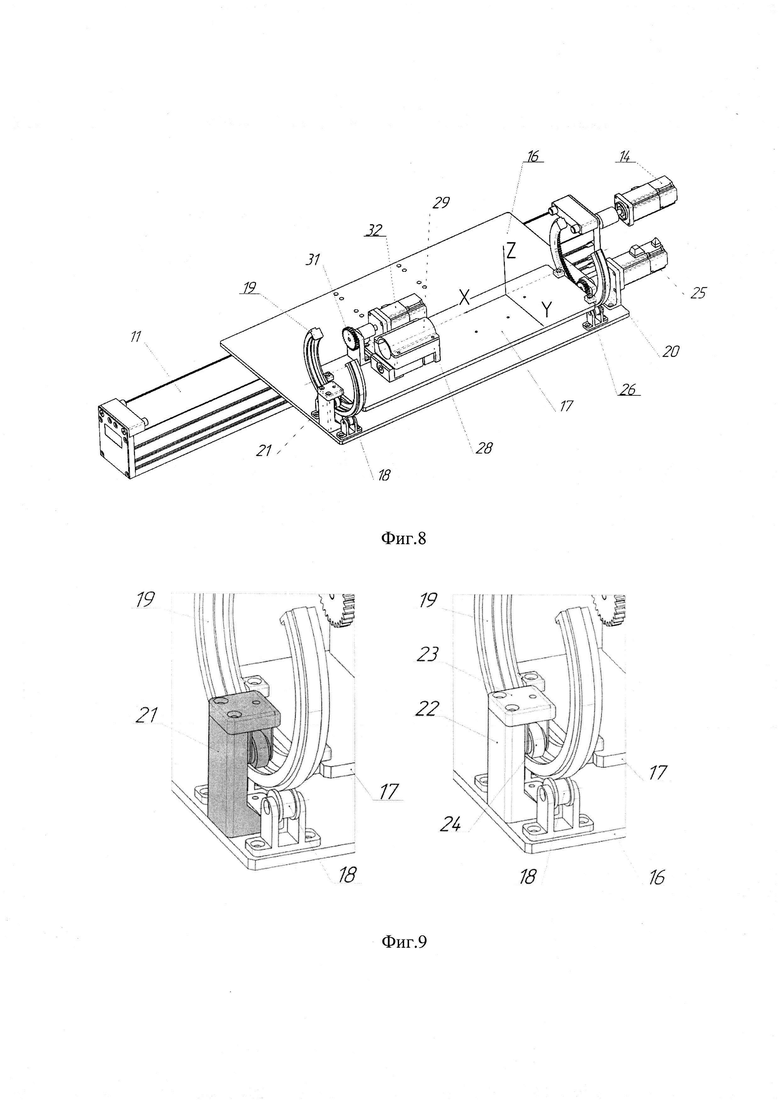
На фиг. 8 изображен отдельный блок прецизионного позиционирования, где 11 - ШВП, 14 - двигатель, 16 - платформа основная, 17 - платформа поворотная, 18 - ролик (4 шт. ), 19 - секторное колесо, 20 - зубчатое колесо, 21 - прижимной механизм, 25 - поворотный двигатель, 26 - шестерня, 28 - ложе (ручки системы доставки), 29 - прижим, 32 - шестерня, 33 - двигатель.
На фиг. 9 представлена схема фиксации деталей блока прецизионного позиционирования, где 16 - платформа основная, 17 - платформа поворотная, 19 - секторное колесо, 18 - ролик, 21 - прижимной механизм, 22 - стойка, 23 - крышка, 24 - колесо.
На фиг. 10 изображена кинематическая схема управления блока прецизионного позиционирования для осуществления поворота относительно центральной продольной оси, где 17 - платформа поворотная, 18 - ролик, 20 - колесо зубчатое, 25 - поворотный двигатель, 26 - шестерня.
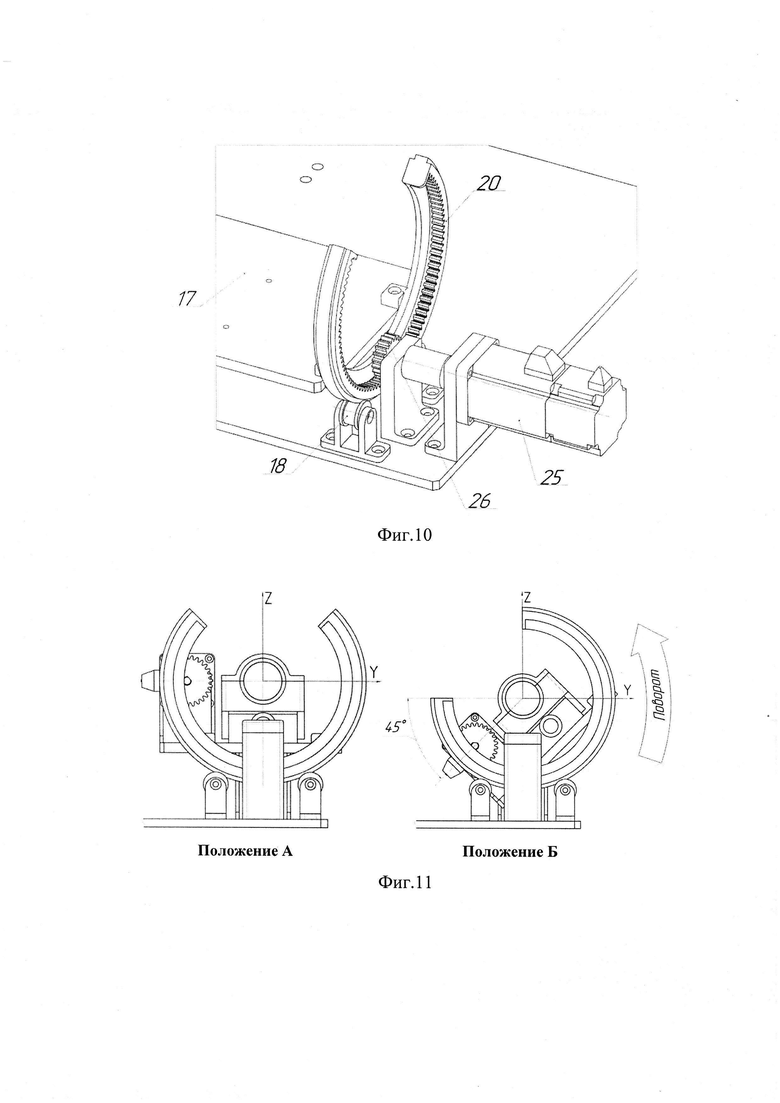
На фиг. 11 представлены примеры наклона платформы поворотной 17. Положение А (исходное): платформа поворотная параллельна корпусу ШВП. Положение Б: платформа поворотная наклонена на 45 градусов относительно корпуса ШВП.
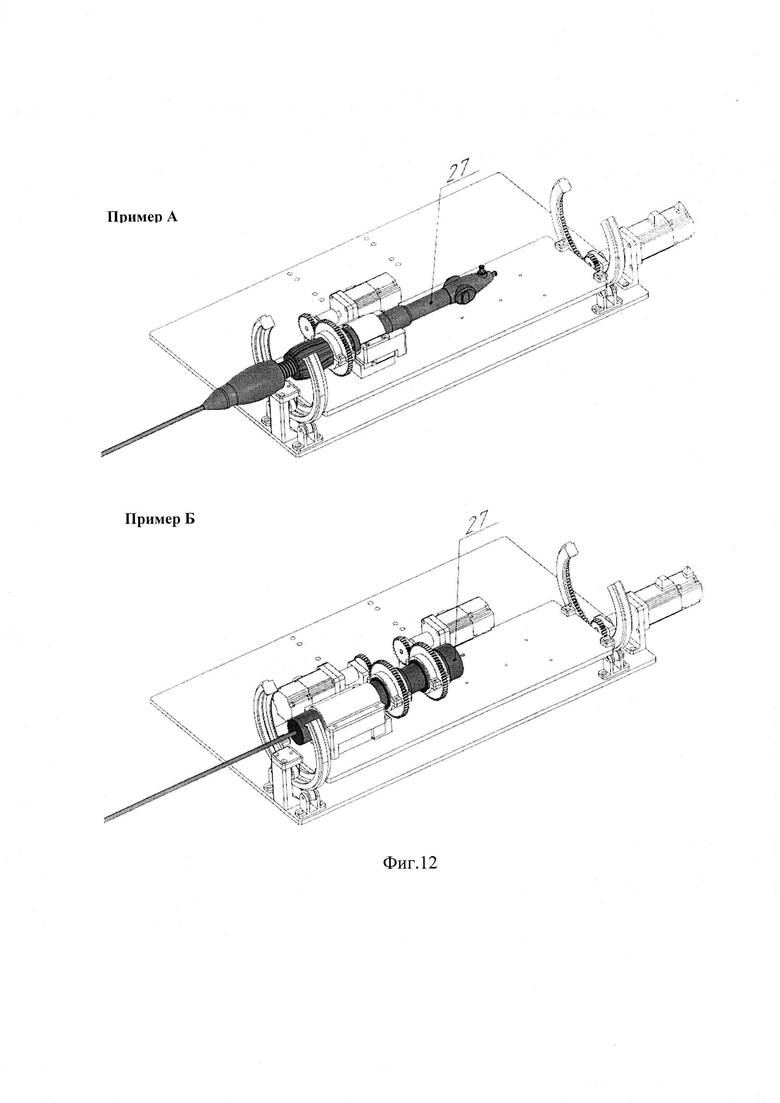
На фиг. 12 изображены примеры расположение ручки системы доставки 27 (не входит в состав заявленной конструкции, представлена для примера) на поворотной платформе роботизированной системы доставки, зафиксированная между ложем и прижимом. Пример А: модель доставочной системы TAVR протеза EvolutR (Medtronic Inc., США). Пример Б: модель доставочной системы TAVR протеза Accurate Neo (2) (Boston Scientific, США).
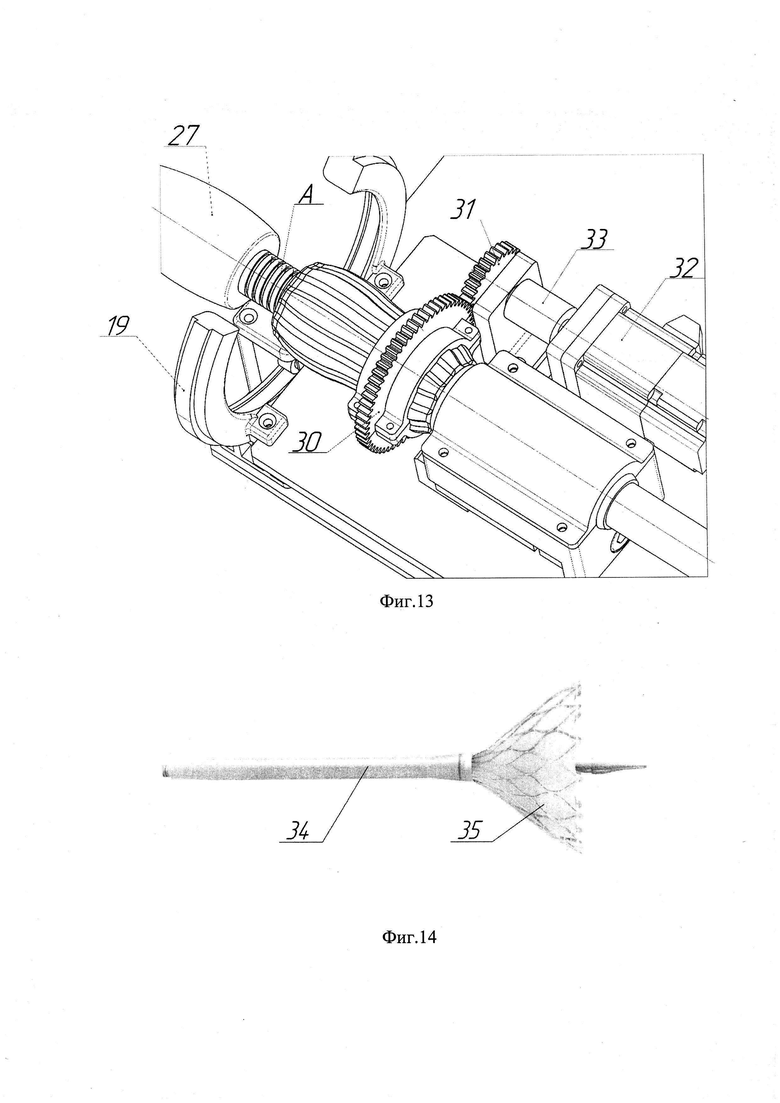
На фиг. 13 изображена кинематическая схема элементов роботизированной система, блока прецизионного позиционирования, реализующая управление этапом извлечения клапана из катетера, где 19 - секторное колесо, 27 - ручка системы доставки, 30 - зубчатое колесо, 31 - шестерня, 32 - двигатель, 33 - муфта.
На фиг. 14 представлен пример извлечения транскатетерного аортального клапана из катетера (не входит в состав заявленной конструкции, представлена для наглядности), где 34 - колпачок катетера, 35 - транскатетерный аортальный клапан.
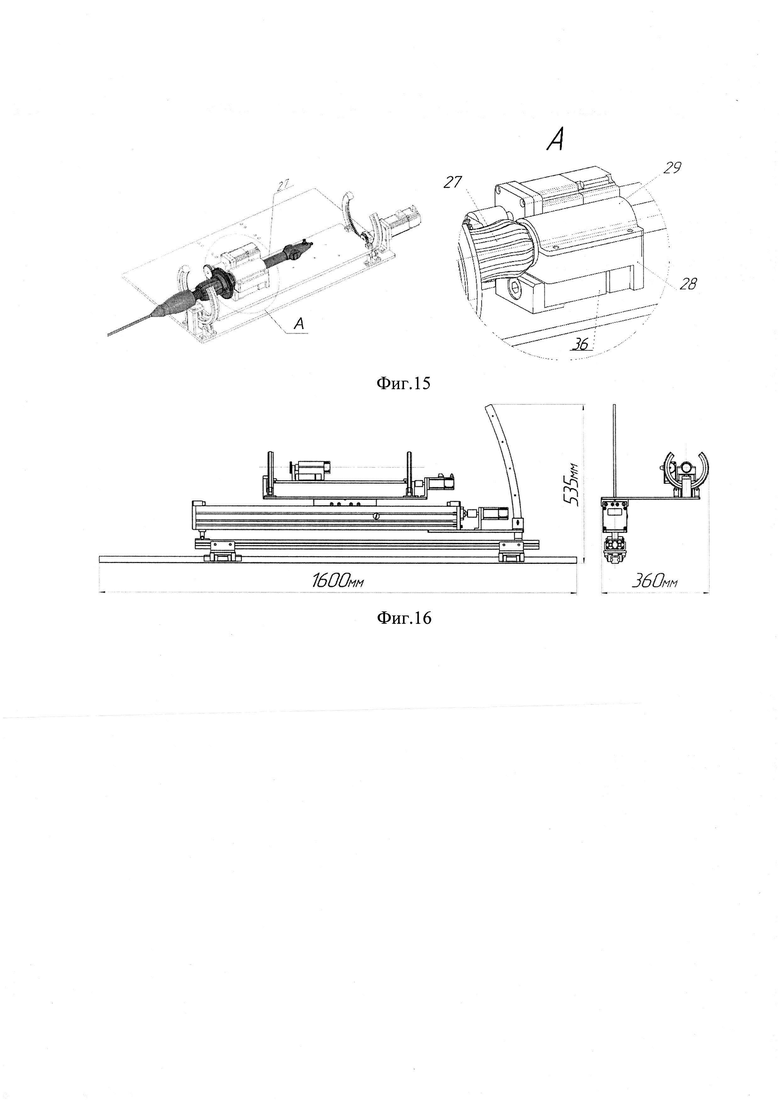
На фиг. 15 представлена схема расположения тензодатчика, где вырывом «А» обозначен укрупненный вид, на котором 27 - ручка системы доставки, 28 - ложе, 29 - прижим, 36 - тензодатчик.
На фиг. 16 представлены возможные габаритные размеры заявленной роботизированной хирургической системы доставки транскатетерного протезирования, исходя из описанных размеров и подвижности ее отдельных компонентов.
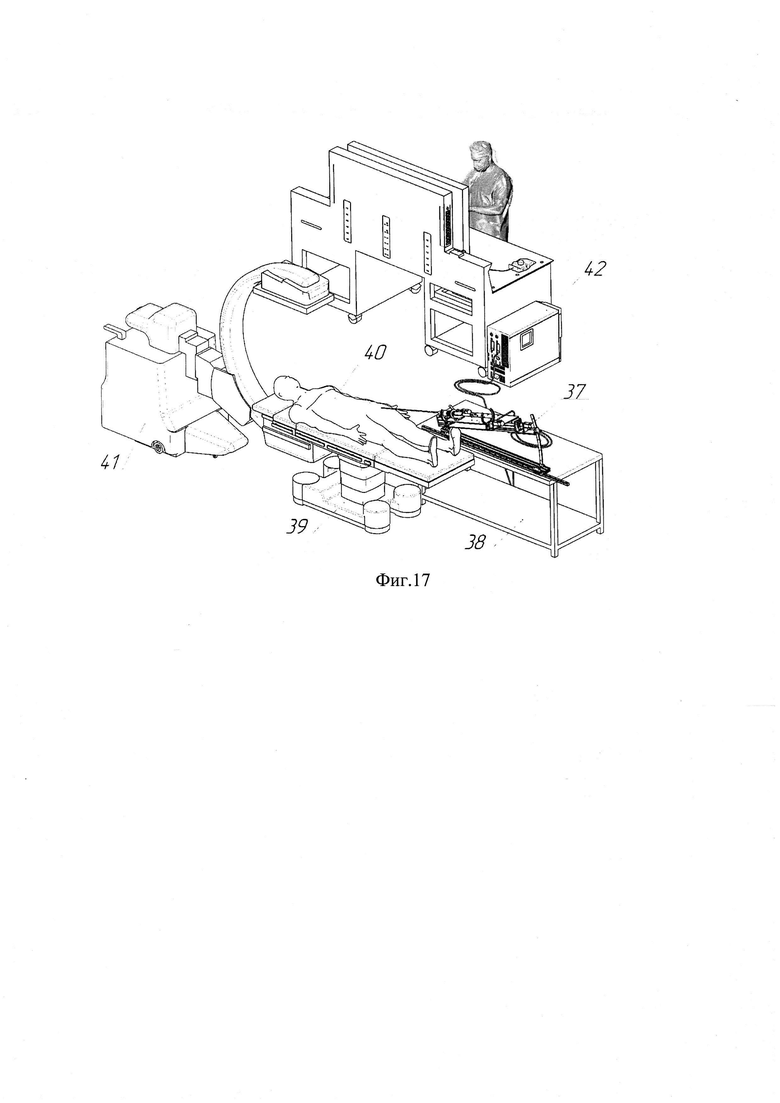
На фиг. 17 представлен упрощенный пример расположения заявленной роботизированной системы относительно других элементов и субъектов операционной, при проведении транскатетерного протезирования клапана аорты, где 37 - роботизированная система доставки, 38 - стол инструментальный, 39 - операционный стол, 40 - пациент, 47 - рентген-установка типа С-дуга, 42 - персональный компьютер.
Роботизированная хирургическая система конструктивно состоит из двух основных блоков - предварительного позиционирования 1 и прецизионного позиционирования 2. Такое разделение обусловлено двухэтапным характером выполнения процедуры транскатетерного протезирования, и, следовательно, разными требованиями к механическим компонентам заявленной роботизированной системы. Первоначальный этап движения TAVR-системы доставки в клинической практике - введение доставочной системы до уровня восходящей аорты, не требует автоматизации и должен быть выполнен оператором вручную. Реализацию данного этапа в случае роботизированной системы исполняет блок предварительного позиционирования 1, осуществляющий простое продольное перемещение TAVR-системы доставки вдоль линии тела пациента. Блок предварительного позиционирования 1 представлен рельсом подвижным в продольном направлении, имеющим длину не менее 1600 мм. Второй этап проведения TAVR-процедуры подразумевает необходимость точного, контролируемого движения катетера доставочной системы, извлечение протеза в области клапана аорта сердца и обратное извлечение (экстракцию) системы. Данный функционал реализует специальный блок роботизированной хирургической системы, обладающий высокой точностью - блок прецизионного позиционирования 2. Данный блок жестко неподвижно соединен с блоком предварительного позиционирования 1. Оба блока являются неотъемлемой частью Роботизированной хирургической системы и представлены в одном экземпляре.
Блок предварительного позиционирования 1 в заявленном устройстве выполняет функцию линейного (вперед - назад) и углового перемещения (наклон относительно длинной продольной оси) всей системы. Условно, для облегчения описания расположения отдельных компонентов, в роботизированной системе выделяют переднюю часть - расположенную «ближе» к пациенту, и заднюю часть - «дальше» от пациента.
Первым компонентом данного блока является направляющий рельс 3 длиной не менее 1600 мм, по которому продольно передвигаются две каретки 4. Каретки 4 приводятся в движение рукой специалиста, обеспечивающего предварительное позиционирование роботизированной хирургической системы.
Движение кареток 4 может быть заблокировано путем закручивания барашковыми винтами 5 в количестве не менее двух штук для каждой каретки 4, что фиксирует дальнейшее продольное движение всей роботизированной системы. После ослабления барашковых винтов 5 возможно возобновление движения системы в продольном направлений. Суммарное допустимое линейное перемещение может достигать не менее 500 мм от начального положения.
На каретки 4 монтирован алюминиевый профиль 6 сечением не менее 25×25 мм квадратного или прямоугольного профиля, который служит опорой для второго блока роботизированной системы - прецизионного позиционирования 2. Блок прецизионного позиционирования 2 монтирован на алюминиевый профиль нежестко, таким образом, чтобы можно было наклонить блок прецизионного позиционирования 2 не более чем на 15 градусов относительно исходного горизонтального положения. Такая подвижность обеспечена двумя компонентами - наклонным шарниром 7, расположенным в передней части системы и направляющей дуги 8, расположенной в задней части системы. В зависимости от анатомических особенностей пациента, формы операционного стола специалист, обеспечивающий предварительное позиционирование системы, может наклонить рукой блок прецизионного позиционирования 2 не более, чем на 15 градусов относительно исходного горизонтального положения и зафиксировать такой наклон путем закручивания стопорного винта 9, прижимающего фиксатор 10 к направляющей дуге 8.
Блок прецизионного позиционирования 2 является двухкомпонентным - содержит шарико-винтовую передачу (ШВП) 11, которая обеспечивает более точное и программно-контролируемое линейное движение, без прямого участия рук оператора и базовую платформу 12, на которой расположены специфические механические передачи, более детально описанные ниже.
ШВП 11 выполнена известными способами промышленного изготовления, однако должны иметь защитную металлическую ленту для минимизации попадания внутрь ШВП 11 движущихся компонентов жидкостей, пыли, элементов других медицинских изделий (катетеров, канюль, проводников и т.д.), применяемых при проведении TAVR. ШВП 11 имеет площадку 13, которая служит для монтирования последующих элементов роботизированной системы. Работа ШВП 11 заключается в продольном линейном перемещении площадки 13 на расстояние до 580 мм относительно исходного положения. Площадка 13 приводится в движение за счет работы двигателя 14, присоединенного муфтой 15 к приводному механизму ШВП 11. Вращение вала двигателя 14 по часовой стрелке обеспечивает вращение внутренних компонентов ШВП 11, что, в свою очередь приводит к движению площадки 13 в переднюю часть роботизированной системы. Вращение двигателя 14 против часовой стрелки, наоборот, приводит к итоговому перемещению площадки 13 в заднюю часть роботизированной системы. Таким образом возможно обеспечить точное, контролируемое перемещение всех вышележащих компонентов системы во время процедуры имплантации TAVR.
На площадке 13 ШВП 11 расположена платформа основная 16, выполненная из жесткого негибкого материала - металла или полимера размером, достаточным для расположения элементов взаимодействия и управления доставочной системы, например габаритами 330×550 мм. На платформе основной 16 расположена платформа поворотная 17, которая за счет системы роликов 18 способна совершать контролируемый оборот вокруг центральной оси на 110 градусов по часовой и 110 градусов против часовой стрелки относительно исходного горизонтального положения.
Ролики 18 двигаются по двум секторным колесам: в передней части -секторному колесу 19, в задней - зубчатому колесу 20. Секторное колесо 19 - гладкое, представляет собой часть окружности сектором в 270 градусов с размыканием в верхней части. Секторное колесо 19 прижимается к роликам 18 передней части платформы поворотной 17 прижимным механизмом 21 с формированием таким образом плотного прижима секторного колеса 19 к роликам 18. Прижимной механизм 21 состоит из стойки 22, крышки 23 и колеса 24, которые объединяются в единую систему винтовыми соединениями. Стойка 22 прикручивается к платформе основной 16.
Зубчатое колесо 20, расположенное в задней части платформы поворотной 17, катается по роликам 18 пассивно, без специального прижима. Зубчатое колесо 20 выполнено также в виде окружности сектором в 270 градусов, с размыканием в верхней части, однако имеет на внутренней поверхности зубцы, формирующие шестеренчатую передачу. Такая передача обеспечивает наклон платформы поворотной 17 за счет вращения вала поворотного двигателя 25. Данный поворотный двигатель 25 осуществляет поворот за счет наличия на валу шестерни 26, которая двигается по внутренней поверхности зубчатого колеса 20. Данная пара формирует таким образом зубчатую передачу с передаточным числом 5,526. Пример поворота платформы представлен на фигуре 10.
На платформе поворотной 17 расположены элементы фиксации и манипулирования ручкой транскатетерной системы доставки 27 (не входит в состав заявленной конструкции, представлена для примера), а именно: ложе 28 ручки системы доставки и прижим 29, которые обхватывают часть ручки и фиксируют ее от продольного перемещения, проворота вдоль своей оси и отклонения от продольной оси (рыскания). Соединение ложа 28 системы доставки и прижима 29 осуществляется известными технологиями: винтами, шпильками, парами «винт-гайка» или их сочетанием таким образом, чтобы исключить описанные выше движения ручки системы доставки.
На ручку системы доставки 27 в области специфических конструктивных колец или шестереночных элементов, которые вращаются на ручке системы доставки и высвобождают транскатетерный протез клапана сердца, надевают разъемное зубчатое колесо 30. Описанные выше кольца или шестереночные элементы являются составной частью доставочной системы и не входят в комплектность настоящего изобретения, поэтому их конструктив и функционал не описан в данной заявке. Разъемное зубчатое колесо 30 надевается сверху на кольца или шестереночные элементы таким образом, чтобы сформировать плотный контакт без проскальзывания. Зубчатое колесо 30 соединено с шестерней 31, которая является составной частью двигателя 32.
На двигатель 32 подается команда с управляющим сигналом от компьютера для включения вращения вала. Это вращение передается шестерне 31 через муфту 33. Зубчатое колесо 30 находится в зацеплении с шестерней 31. Данная пара формирует зубчатую передачу с передаточным числом 2,143. Таким образом зубчатое колесо 30, вращаясь вокруг оси, управляет степенью раскрытия кончика катетера доставочной системы 27. За счет этого линейное движение позволяет сдвинуть колпачок 34 катетера ручки системы доставки 27 и высвободить транскатетерный аортальный клапан 35 (не входит в состав заявленной конструкции, представлен для примера).
Возможен более усложненный вариант управления ручкой системы доставки, которая, например, предполагает двухэтапное высвобождение транскатетерного протеза клапана аорты (см. фиг 12, пример Б). В таком случае ручка системы доставки 27 имеет два управляющих элемента, а, следовательно, блок прецизионного функционирования должен быть адаптирован: подключают дополнительное зубчатое колесо 30, которое приводится в движение дополнительной шестерней 31, через муфту 33, которые соединены со вторым двигателем 32. Работа такой системы предполагает изолированное и/или одновременное вращение обоих зубчатых колес в зависимости от требуемого управляющего воздействия и этапа процедуры.
Заявленная роботизированная система оснащена контуром обратной связи. В течение всего хода операции происходит измерение усилия продвижения кончика катетера TAVR системы доставки по артерии пациента. Данный параметр измеряется тензодатчиком 36 за счет силы обратной связи, которую создает катетер при своем продвижении внутри артерии. Контроль этого усилия позволяет провести безопасную и качественную операцию транскатетерного протезирования аортального клапана: замедлить скорость продвижения катетера или остановить процедуру при возникновении критических показаний - больше пороговых, определяемых в программном обеспечении. Источником пороговых значений могут быть литературные данные и/или собственные представления оператора данной роботизированной системы.
Расположен тензодатчик 36 под ложем 28, таким образом, чтобы измерять продольную силу, возникающую при движении катетера.
Материалы и компоненты
Компоненты роботизированной системы могут являться готовыми изделиями. Однако, учитывая индивидуальную геометрию элементов, в которых непосредственно закрепляют доставочную систему: ложе 28 и прижим 29, а также специфическое для управления степенью раскрытия катетера - зубчатое колесо 30, данные компоненты являются строго адаптивными для каждой модели TAVR-систем доставки. Такая адаптация возможна за счет аддитивных технологий - трехмерной печати из специализированных полимеров по известным технологиям (методом фотополимерной или экструзионной печати), а также из трехмерной печати металлами (прямым лазерным спеканием металлов).
Соединение отдельных элементов роботизированной системы в единую конструкцию осуществляют по известным технологиям - с помощью крепежных элементов (винтов, шурупов, шпилек), с использованием сварки, пайки, а также клеевых технологий. Кроме того, элементы, монтируемые на валы двигателя 14, поворотного двигателя 25 и двигателя 32, а именно: зубчатое колесо 20, шестерня 26, шестерня 31, муфта 33, могут быть монтированы запрессовкой, также по известным технологиям.
Двигатель 14, поворотный двигатель 25 и двигатель 32 могут быть выполнены, например, в виде электродвигателя постоянного тока (щеточного или бесщеточного типа) или переменного тока (синхронного или асинхронного типа). В частности, в настоящем исполнении роботизированной системы двигатель 14 и поворотный двигатель 25 представлены серводвигателем модели 40AST-M00330-48V, а двигатель 32 - серводвигатель модели 40AST-М00130-48V.
Принцип работы роботизированной системы доставки.
Представленная роботизированная хирургическая система располагается в стерильной зоне гибридной операционной, в которой проводят катетерные вмешательства по протезированию клапана аорты. В своем применении система доставки имеет несколько этапов работы.
Первый этап.
После осуществления всех подготовительных этапов вмешательства, не связанных с использованием заявленной роботизированной системы: обеспечение сосудистого доступа стандартным способом, введение интродьюсера, необходимых проводников (guidewire), катетеров pig-tail и т.д., специалист из состава оперирующей бригады монтирует доставочную систему TAVR в блок прецизионного позиционирования 1 - закрепляя ее на ложе 28 и фиксируя прижимом 29.
После этого стандартный стол инструментальный 38, с установленной и закрепленной на нем роботизированной системой, фиксируют неподвижно рядом с операционным столом 39. Оператор - интервенционный кардиолог, по проводнику вводит доставочную систему в организм пациента 40 (с транскатетерным клапаном внутри) согласно методике, предусмотренной производителем TAVR-системы. Далее оператор осуществляет предварительное позиционирование, используя возможности и конструктив блока предварительного позиционирования 1: руками перемещает корпус ШВП по направляющей рельсе и, таким образом, контролируя положение доставочной системы при помощи стандартных методов интраоперационного контроля рентген - установки типа С-дуга 41, оператор проводит доставочную систему до уровня восходящей аорты. При этом оператор может дополнительно осуществить наклон прецизионного блока 2 до 15° относительно горизонтального состояния за счет использования направляющей дуги 8 и манипулирования стопорным винтом 9. В итоге транскатетерный клапан, находящийся в сжатом состоянии внутри колпачка катетера системы доставки, передвигается по артериальной системе пациента до целевого участка.
Второй этап.
Дальнейшие манипуляции выполняются удаленно (в защищенном от рентгеновского излучения помещении) с помощью компьютера 42 и специально разработанных алгоритмов управления. Еще на этапе дооперационного обследования пациента и подготовки его к операции для транскатетерного протезирования аортального клапана разрабатывается специализированная программа («маршрутная карта») для управлением роботизированной системой доставки, где учитываются все анатомические особенности пациента. Такая «карта» позволяет управлять серводвигателями системы доставки и выполнить операцию по транскатетерному протезированию аортального клапана дистанционно. Это позволяет удалить хирурга из зоны рентгеновского излучения и уменьшить время операционного вмешательства, что благоприятно сказывается на времени выздоровления пациента.
Система доставки управляется компьютерным алгоритмом (разрабатывается индивидуально для каждого пациента). Управление происходит следующим образом: исходя из известного положения катетера после этапа предварительного позиционирования на двигатель 14 подается управляющий сигнал от компьютера с командой вращения, что приводит ШВП 11 в движение. Требуемое количество оборотов вращения вала двигателя 14 контролируется энкодером и серводрайвером. Вращение вала двигателя передается через муфту 15 на входной вал привода ШВП 11. Принцип работы ШВП состоит в том, чтобы преобразовать вращение вала в поступательное линейное перемещение. Поэтому вращение вала ШВП 11 начинает смещать площадку 13 ШВП и все вышележащие элементы - платформу основную 16, платформу поворотную 17 и другие, связанные с ними компоненты, которые в итоге двигают ручку системы доставки, и катетер с клапаном внутри, в частности. При достижении нужного положения - фиброзного кольца клапана аорты, блоку прецизионного позиционирования (контролируется перемещение кончика катетера при помощи рентген-установки типа С-дуга) подается команда на остановку вращения вала двигателя 14.
Во время проведения операции по протезированию транскатетерного аортального клапана требуется, кроме линейного перемещения кончика катетера системы доставки, еще и его вращение вокруг своей оси. Происходит это следующим образом:
В определенный момент времени на поворотный двигатель 25 подается соответствующий сигнал с командой для включения вращения вала двигателя. Далее вращение передается на шестерню 26. Шестерня 26 находится в зацеплении с зубчатым колесом 20, благодаря чему, последнее также начинает вращение вокруг продольной оси. Таким образом, вращается платформа поворотная.
Непосредственно процедура имплантации протеза TAVR заключается в высвобождении его из кончика катетера за счет чего происходит его контролируемое увеличение диаметра и фиксация в просвете фиброзного кольца клапана аорты. Данное извлечение клапана 35 из колпачка катетера 34 происходит следующим образом: на двигатель 32 подается управляющее воздействие, которое приводит к вращению его вала, муфты 33 и шестерни 31. Последняя входит в зацепление с зубчатым колесом 30, которое, вращаясь, вращает элементы ручки системы доставки, ответственные за извлечение протеза из колпачка 34. Двигатель 32 может осуществлять медленное вращение, синхронизированное программно с другими двигателями, в частности, двигателем 14, который осуществляет точное движение всей платформы по ШВП 11. Синхронизация данных движений - линейного положения катетера в области фиброзного кольца клапана аорты и извлечение протеза из колпачка, позволяет точно позиционировать протез во время имплантации.
Третий этап.
После установки аортального клапана катетерная часть TAVR-системы доставки извлекается из артерии пациента путем проведения описанных выше действий в обратном порядке. Оператор подает управляющее воздействие на двигатель 32, который, приводя в движение пару зубчатое колесо 30 - шестерня 31, задвигает колпачок катетера 34 в исходное положение. После чего, благодаря работе двигателя 14, приводится в движение механизм ШВП 11, вытягивающий катетерную системы до уровня нисходящей аорты. Таким образом работа блока прецизионного позиционирования 2 завершается.
После чего, оператор и (или) специалист из состава оперирующей бригады, обеспечивающий предварительное позиционирование системы, сдвигая элементы блока предварительного позиционирования 1, предварительно ослабив винты барашковые 5, на каретках 4 до момента полного извлечения катетера из бедренной артерии пациента. Манипуляции с роботизированной системой доставки по протезированию аортального клапана завершены, вмешательство завершают по протоколу транскатетерного протезирования клапана аорты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИБРИДНОГО ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ С ВЫПОЛНЕНИЕМ ТРАНСКАТЕТЕРНОЙ ИМПЛАНТАЦИИ ЛЕГОЧНОГО КЛАПАНА ТРАНСАПИКАЛЬНЫМ ДОСТУПОМ | 2020 |
|
RU2777182C2 |
| БИОПРОТЕЗ ДЛЯ ТРАНСКАТЕТЕРНОЙ ЗАМЕНЫ МИТРАЛЬНОГО КЛАПАНА | 2020 |
|
RU2738306C1 |
| Способ удаления системы доставки протеза аортального клапана при транскатетерном протезировании у пациентов с тяжелым аортальным стенозом и недораскрытием протеза аортального клапана | 2024 |
|
RU2835114C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ДОСТУПА К ПОДВЗДОШНЫМ АРТЕРИЯМ ПРИ ВЫПОЛНЕНИИ ТРАНСКАТЕТЕРНОЙ ИМПЛАНТАЦИИ АОРТАЛЬНОГО КЛАПАНА | 2015 |
|
RU2581320C1 |
| БИОЛОГИЧЕСКИЙ ПРОТЕЗ АОРТАЛЬНОГО КЛАПАНА СЕРДЦА | 2011 |
|
RU2479287C2 |
| ПРОТЕЗ КЛАПАНА, УСТАНАВЛИВАЕМЫЙ ПОСРЕДСТВОМ КАТЕТЕРА, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2014 |
|
RU2666591C2 |
| Биопротез аортального клапана (варианты) для открытой бесшовной и транскатетерной имплантации | 2020 |
|
RU2749118C1 |
| МЕТОД И УСТРОЙСТВО ДЛЯ ИМПЛАНТАЦИИ БАЛЛОНОРАСШИРЯЕМОГО ПРОТЕЗА КЛАПАНА СЕРДЦА | 2016 |
|
RU2625285C1 |
| МЕТОДИКА РЕТРОГРАДНОГО ЗАКРЫТИЯ ПАРАПРОТЕЗНОЙ ФИСТУЛЫ МИТРАЛЬНОГО КЛАПАНА ЧРЕСКОЖНЫМ ТРАНСКАТЕТЕРНЫМ СПОСОБОМ С ИСПОЛЬЗОВАНИЕМ ОККЛЮДЕРА | 2014 |
|
RU2563366C1 |
| Транскатетерный торакоскопический способ протезирования митрального клапана у пациентов крайне высокого риска хирургического лечения (варианты) | 2017 |
|
RU2675068C1 |
Изобретение относится к медицинской технике. Роботизированная хирургическая система транскатетерного протезирования клапана аорты представляет собой многокомпонентное техническое устройство манипулирования транскатетерной доставочной системой от этапа введения ее в сосудистую систему, осуществления управляемого протезирования клапана аорты, до выведения из организма. Блок предварительного позиционирования системы выполнен в виде направляющего рельса, по которому продольно передвигаются две каретки. На каретки монтирован алюминиевый профиль, на который монтирован блок прецизионного позиционирования, содержащий шарико-винтовую передачу (ШВП) и базовую платформу. Площадка ШВП приводится в движение за счет работы электродвигателя, присоединенного муфтой к приводному механизму ШВП. На площадке ШВП расположена платформа основная из жесткого негибкого материала, на которой расположена платформа поворотная, способная совершать контролируемый оборот вокруг центральной оси относительно исходного горизонтального положения. На платформе поворотной расположены элементы фиксации и манипулирования ручкой транскатетерной системы доставки – соединенные друг с другом ложе ручки системы доставки и прижим, которые обхватывают часть ручки и фиксируют ее от продольного перемещения, проворота вдоль своей оси и отклонения от продольной оси. Достигается управление катетерными доставочными системами, реализующее этап контролируемого высвобождения транскатетерного протеза в целевой области имплантации - фиброзном кольце клапана аорты, во время малоинвазивного трансфеморального вмешательства. 17 ил.
Роботизированная хирургическая система транскатетерного протезирования клапана аорты, представляющая собой многокомпонентное техническое устройство манипулирования транскатетерной доставочной системой от этапа введения ее в сосудистую систему, осуществления управляемого протезирования клапана аорты, до выведения из организма, содержащая блок предварительного позиционирования и блок прецизионного позиционирования, отличающаяся тем, что блок предварительного позиционирования выполнен в виде направляющего рельса, по которому продольно передвигаются две каретки, движение которых может быть заблокировано путем закручивания барашковыми винтами в количестве не менее двух штук для каждой каретки, на каретки монтирован алюминиевый профиль, на который монтирован блок прецизионного позиционирования, содержащий шарико-винтовую передачу (ШВП) и базовую платформу, ШВП имеет площадку, которая выполнена с возможностью приведения в движение за счет работы электродвигателя, присоединенного муфтой к приводному механизму ШВП, на площадке ШВП расположена платформа основная, выполненная из жесткого негибкого материала, на которой расположена платформа поворотная, способная за счет системы роликов совершать контролируемый оборот вокруг центральной оси на 110 градусов по часовой и 110 градусов против часовой стрелки относительно исходного горизонтального положения, на платформе поворотной расположены такие элементы фиксации и манипулирования ручкой транскатетерной системы доставки, как соединенные друг с другом ложе ручки системы доставки и прижим, которые обхватывают часть ручки и фиксируют ее от продольного перемещения, проворота вдоль своей оси и отклонения от продольной оси, на ручку системы доставки надето разъемное зубчатое колесо, соединенное с передаточной шестерней, которая является составной частью электродвигателя.
| US 2021068911 A1, 11.03.2021 | |||
| АППАРАТ ПОГЛОЩАЮЩИЙ | 2005 |
|
RU2283791C1 |
| CN 114129269 A, 04.03.2022 | |||
| CN 113769238 A, 10.12.2021 | |||
| CN 113598947 A, 05.11.2021 | |||
| CN 109821137 A, 31.05.2019 | |||
| WO 2019113867 A1, 20.06.2019 | |||
| ОДНОНАПРАВЛЕННАЯ РУКОЯТКА УПРАВЛЕНИЯ КАТЕТЕРОМ С КОНТРОЛЕМ НАТЯЖЕНИЯ | 2013 |
|
RU2676841C2 |

