Изобретение относится к сканирующей зондовой микроскопии, к устройствам, обеспечивающим управление сканирующими зондовыми микроскопами. Группа изобретений может быть использована для сканирования поверхности образца с целью определения рельефа его поверхности, определения размеров характерных особенностей на его поверхности и пр.
Известен сканирующий зондовый микроскоп, включающий вибрационный зондовый датчик, вертикальный привод для взаимного перемещения датчика и образца перпендикулярно плоскости сканирования, измерительный преобразователь сигналов от вибрационного зондового датчика, содержащий блок управления, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием сдвоенного фазового синхронного смесителя, сигнала и низкочастотных фильтров, причем перед блоком USB вставлен блок гальванической развязки (RU 2428700 C2). Данный сканирующий зондовый микроскоп обладает достаточно широкими функциональными возможностями. Недостатком является достаточно высокий уровень шумов.
Известно применение при обработке изображений в микроскопии низкочастотной фильтрации (RU 2296387 C1), аналоговых и цифровых фильтров (CN 102833462 B).
Технической проблемой является уровень шумов, вышеуказанные устройства не устраняют данной проблемы.
Устройство по RU 2428700 C2 можно принять в качестве ближайшего аналога.
Предлагается контроллер сканирующего зондового микроскопа, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием сдвоенного фазового синхронного смесителя, сигнала и низкочастотных фильтров, причем перед блоком USB вставлен блок гальванической развязки. Сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации.
Соответственно, данный контроллер предназначен для использования в сканирующем зондовом микроскопе.
Таким образом, также предлагается сканирующий зондовый микроскоп, включающий вибрационный зондовый датчик, вертикальный привод для взаимного перемещения датчика и образца перпендикулярно плоскости сканирования, измерительный преобразователь сигналов от вибрационного зондового датчика, содержащий блок управления, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием сдвоенного фазового синхронного смесителя, сигнала и низкочастотных фильтров, причем перед блоком USB вставлен блок гальванической развязки. Сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации.
Техническим результатом является уменьшение уровня шумов.
Технический результат обеспечивается за счет последовательной обработки сигнала определенным образом. Сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации.
Контроллер сканирующего зондового микроскопа предназначен для обеспечения работы сканирующего зондового микроскопа: организации сканирования, обратных связей, управления параметрами, регистрации сигналов, в том числе сигналов от зондового датчика, а также для связи с рабочей станцией (компьютером).
Контроллер сканирующего зондового микроскопа выполняет следующие функции: преобразует управляющие сигналы, поступающие из программы управления, формирует сигналы для сканера, шаговых двигателей, измерительных головок и термостолика, обрабатывает сигналы с измерительных головок.
Контроллер предназначен для обеспечения работы сканирующих зондовых микроскопов различных конфигураций в различных режимах (сканирующий зондовый микроскоп в конфигурации для сканирования зондом, для сканирования образцом), способен поддерживать работу с различными измерительными головками, предназначенными для работы с зондовыми датчиками различных типов: зондовыми датчиками кантилеверного типа, вибрационными зондовыми датчиками, зондовыми датчиками на основе оптоволокна для сканирующей ближнепольной оптической микроскопии и т.д. (указанные части - измерительные головки, зондовые датчики - в состав контроллера сканирпующего зондового микроскопа не входят).
Важнейшими параметрами контроллера сканирующего зондового микроскопа являются количество регистрируемых сигналов, их частотные характеристики, выходные сигналы и их характеристики, быстродействие, тип и характеристики цепей обратной связи (связей), возможности внутренней коммутации, возможности внутренней аналоговой (усиление, фильтрация) и цифровой обработки сигналов.
Ниже приводится вариант выполнения устройств группы изобретений (один из возможных вариантов, устройства могут выполнены и по-другому, с наличием всех элементов, указанных в формуле изобретения, с достижением технического результата).
Контроллер имеет модульную конструкцию. В стандартную комплектацию входят кросс-плата с установленными на ней: блоком питания, платой AFM и платой высоковольтных усилителей. Кроме того, на кросс-плате имеется 6 слотов (4 больших и 2 маленьких), в которые могут устанавливаться платы расширения. При установке дополнительных плат в маленькие слоты, следует иметь ввиду, что на них не подаются аналоговые сигналы, а также есть ограничения и по цифровым сигналам.
Для обработки сигналов на плате AFM установлен цифровой сигнальный процессор с плавающей запятой, работающий на частоте 320 МГц (Floating point DSP 320 MHz).
Для обмена данными между сигнальным процессором и его периферией, обмена данными с USB, генерации сигналов, управления АЦП, на плате AFM установлена программируемая вентильная матрица.
Способом обработки сигналов от измерительной головки является их синхронное детектирование. Плата AFM для этого содержит синхронный детектор. Синхронный детектор состоит из пары фазовых синхронных смесителей (умножителей сигнала на входе синхронного детектора на соответствующие опорные сигналы Sin и Cos) и системы низкочастотной фильтрации. Каждый умножитель выполнен на базе микросхемы AD734 производства Analog Devices, является аналоговым и конструктивно распаян на плате AFM наряду с другими компонентами, при этом автономное либо развязанное питание микросхем AD734 не предусмотрено. Далее, в виде проекций MSin и MCos, через фильтр низких частот (20 кГц), сигнал подается на мультиплексор перед АЦП.
Фильтрация низких частот является многоступенчатой. Низкочастотная фильтрация выходного сигнала смесителей осуществляется аналоговым фильтром третьего порядка. После мультиплексора и оцифровки АЦП, сигнал дополнительно фильтруется цифровым образом. Цифровая часть фильтрации осуществляется в цифровом сигнальном процессоре.
Контроллер посредством кабельных соединений подключается к компьютеру и измерительному блоку.
Измерительный блок может комплектоваться различными дополнительными устройствами. При работе с некоторыми из них, например, такими как термостолик или наносклерометрическая головка, контроллер комплектуется дополнительными платами расширения, при этом меняется схема подключения.
Для проведения измерений с нагревом образца в измерительный блок на держателе образца устанавливается термостолик.
Аналоговые сигналы, предназначенные для передачи с платы высоковольтных усилителей на плату AFM:
- HV_X (нормированный);
- HV_Y (нормированный);
- HV_Z (нормированный);
- X sensor;
- Y sensor;
- Z sensor;
- Res2;
- Res4.
- Аналоговые сигналы, предназначенные для передачи с платы AFM на плату
высоковольтных усилителей:
- Output X;
- Output Y;
- Output Z;
- Ex6;
- Sample.
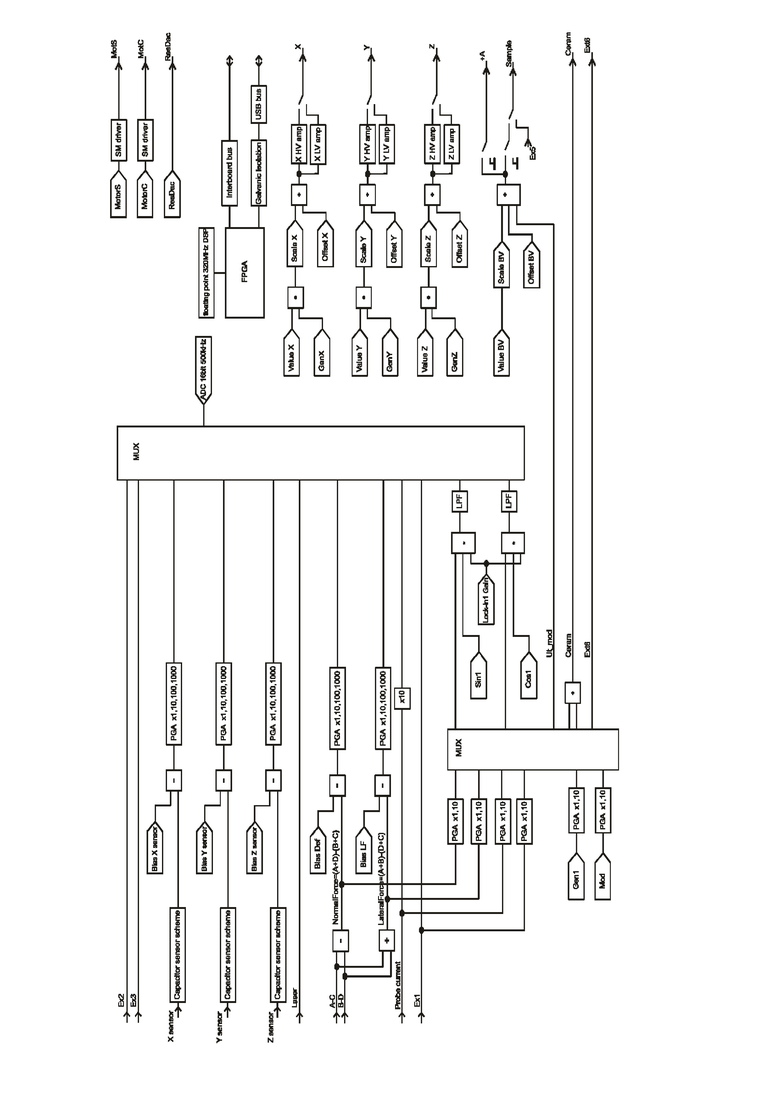
В контроллере может быть установлена, например, плата AFM 9.0 (фиг.1).
Сигналы A-C, B-D (выходы с четырехсекционного фотодиода) преобразуются в сигналы DFL = (A-С) - (B-D) и LF = (A-С) + (B-D). Первоначальные сигналы A-С и B-D более не используются.
Сигналы HV_X, HV_Y, HV_Z (нормированные), Gnd (земля прибора), Laser, Ex2, Ex3, Res1, Res2, Res3, Res4 идут напрямую на вход мультиплексора перед АЦП и доступны для измерения (оцифровки).
Сигналы X sensor, Y sensor, Z sensor смешиваются с сигналами с программируемых ЦАПов смещения (Bias) и идут на вход мультиплексора перед АЦП через программируемый усилитель с коэффициентами усиления ×1, 10, 100, 1000.
Сигналы DFL и LF смешиваются с сигналами с программируемых ЦАПов смещения (Bias) и идут на вход мультиплексора перед АЦП через программируемый усилитель с коэффициентами усиления ×1, 10, 100, 1000. Кроме этого, эти сигналы, до смещения и усиления, идут на фильтры высоких частот (170 Гц) и усилители с коэффициентами усиления ×1, 10 и далее на матрицу переменных сигналов (входа синхронного детектора).
Сигнал EX1 идет напрямую на вход мультиплексора перед АЦП и доступен для измерения (оцифровки). Кроме этого, этот сигнал идет на фильтр высоких частот (170 Гц) и усилитель с коэффициентами усиления ×1, 10 и далее на матрицу переменных сигналов (входа синхронного детектора).
Сигнал STM идет на вход мультиплексора перед АЦП с усилением ×10 и доступен для измерения (оцифровки). Кроме этого, этот сигнал, до усиления, идет на фильтр высоких частот (170 Гц) и с коэффициентами усиления ×1, 10 и далее на матрицу переменных сигналов (входа синхронного детектора).
Выходы с матрицы переменных сигналов идут на синхронный детектор.
Синхронный детектор состоит из пары фазовых синхронных смесителей (умножителей сигнала на входе синхронного детектора на соответствующие опорные сигналы Sin и Cos) и системы низкочастотной фильтрации. Каждый умножитель выполнен на базе микросхемы AD734 производства Analog Devices, является аналоговым и конструктивно распаян на плате AFM 9.0 наряду с другими компонентами, при этом автономное либо развязанное питание микросхем AD734 не предусмотрено. Далее, в виде проекций MSin и MCos, через фильтр низких частот (20 кГц), сигнал подается на мультиплексор перед АЦП. Фильтрация низких частот является многоступенчатой. Низкочастотная фильтрация выходного сигнала смесителей осуществляется аналоговым фильтром третьего порядка. После мультиплексора и оцифровки АЦП, сигнал дополнительно фильтруется цифровым образом. Цифровая часть фильтрации осуществляется в цифровом сигнальном процессоре.
Все генераторы, имеющиеся на плате AFM, устроены аналогичным образом.
Выходной сигнал генератора, используемый затем для подачи на зондовый датчик, образец, для раскачки зондового датчика либо как опорный сигнал для синхронного детектора, берется с выхода ЦАП, цифровой входной сигнал которого формируется в вентильной матрице (FPGA).
После матрицы переменных сигналов также стоят фильтры высоких частот.
На вход матрицы переменных сигналов перед синхронным детектором после усилителей с коэффициентами усиления ×1, 10 приходят также сигналы с генераторов Gen1 и Mod (одинаковые по характеристикам).
Выходы матрицы переменных сигналов (кроме идущих на синхронный детектор): Ut_mod, Ceram (Probe), EXT6. Два последних сигнала идут сразу на выходной разъем, а сигнал Ut_mod смешивается с выходом ЦАП BV.
Результирующий сигнал BV через систему реле выходит на внешние разъемы -+AMP и Sample. Реле независимы, и сигнал BV можно подавать на один из этих выходов, либо сразу на оба. Выход Sample может также быть соединен с внешним входом Ex5, при этом выход +AMP может быть либо заземлен, либо на него подан сигнал BV.
ЦАП сигнала BV представляет собой систему трех ЦАПов - Value BV, Scale BV и Offset BV.
16-разрядный АЦП с частотой 500 кГц измеряет приходящие на него сигналы в порядке, задаваемым матрицей из файла BrdSignals.ini. Увеличенная частота измерения сигнала означает увеличение точности его измерения - виртуальное(используемые для вычисления сигналов Mag и Phase), SensorX, SensorY (используемые для работы в режиме с замкнутыми цепями обратной связи, управляющими перемещениями сканера по осям X, Y (режим Close Loop)) и сигнал SensorZ (используемый для вычисления сигнала SensorHeight) измеряются с наибольшим приоритетом.
С платы AFM имеются два аналоговых выхода на задней стенке (гнезда BNC).
Гнездо OUT AC может использоваться для вывода (наблюдения при помощи внешнего осциллографа) переменных сигналов, а именно - сигналов, приходящих на вход матрицы переменных сигналов, т.е. DFL, LF, STM, EX1, а также сигналы с генераторов Gen1 и Mod. На этом выходе только переменные составляющие этих сигналов. Частота среза фильтра высоких частот 170 Гц.
На гнездо OUT DC можно вывести из DSP через ЦАП OSC_DAC (16 бит) постоянные (низкочастотные) сигналы. Частоты этих сигналов до 16 кГц.
На 50-ти контактные разъемы выводится сигнал с ResDAC (16 бит) из DSP.
Также до 16 кГц.
Для формирования сигналов управления сканером используются четыре ЦАПа на каждый канал (X,Y,Z). Сигналы с ЦАПов Value и Gen смешиваются и подаются на усилитель Scale, и затем к ним примешивается сигнал Offset.
Результирующие сигналы Output X, Output Y, Output Z идут по шинам кросс-платы на плату высоковольтных усилителей. Усилители HV amp и LV amp находятся на плате высоковольтных усилителей.
Модификация платы AFM может включать второй фазовый синхронный смеситель, что обеспечивает более эффективную работу контроллера, более низкий уровень шумов.
Плата высоковольтных усилителей предназначена для усиления сигналов управления сканером до значений, необходимых для подачи на пьезокерамику, для обработки сигналов с датчиков перемещения и для управления одним шаговым двигателем.
Плата высоковольтных усилителей может быть выполнена, например, следующим образом.
На задней стенке платы находятся два разъема.
Сигналы Output X, Output Y, Output Z, поступившие на плату высоковольтных усилителей через кросс-плату, попадают на систему усилителей.
Сигналы Output X, Output Y могут быть преобразованы в сигналы X+, X- (Y+, Y-) напряжением ± 150 В каждый (полоса 4 кГц) или в сигналы LV_X+, LV_X- (LV_Y+, LV_Y-) напряжением ± 5 В каждый (полоса 10 кГц). Переключение сигналов осуществляется программируемым реле, сигналы выходят на те же контакты в разъемах.
Сигнал Output Z преобразовывается в сигналы Z+ и Z- напряжением ± 150 В, полосой 12 кГц каждый. Реле в данном случае отключает один из каналов - Z-.
На плате также размещены три блока обработки сигналов датчиков перемещения и два ЦАПа, обеспечивающие работу одного шагового двигателя.
Блок питания контроллера подключается к внешней сети электропитания стандартным кабелем. Напряжение внешней сети 110/220 В, 50/60 Гц. В зависимости от напряжения внешней сети необходимо установить переключатель на задней стенке контроллера рядом с разъемом питания в нужное положение. Переключатель действует только на напряжение, которое подается на трансформаторы платы высоковольтных усилителей.
Блок питания обеспечивает контроллер необходимыми напряжениями для питания электронных компонентов +/-15 В и +5 В. Другие напряжения вырабатываются уже на кросс-плате. Все напряжения, включая напряжения для платы HV, идут на кросс-плату.
Заземление обеспечивается через земляной контакт разъема питания, а также специальным зажимом заземления на задней крышке контроллера. Оба заземления равнозначны.
В качестве одного из возможных вариантов контроллер может иметь следующие параметры:
габаритные размеры, мм 160×445×500,
вес, кг 12,0,
напряжение питания, В 90÷240 (+10 %/-15 %), 50/60 Гц,
потребляемая мощность (без дополнительных блоков питания), не более, Вт 80,
интерфейс USB 2.0 Full speed.
Применение данного контроллера в сканирующем зондовом микроскопе обеспечивает точность измерений, снижение уровня шумов, что, в свою очередь, способствует расширению функциональных возможностей при проведении сканирующей зондовой микроскопии, обеспечение изучения как твердых, так и мягких объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК УПРАВЛЕНИЯ ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2007 |
|
RU2428700C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ БИОЛОГИЧЕСКИХ ПРИМЕНЕНИЙ | 2008 |
|
RU2472165C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2009 |
|
RU2488126C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1997 |
|
RU2152063C1 |
| СПОСОБ УСКОРЕНИЯ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2009 |
|
RU2428655C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| ЭЛЕКТРОХИМИЧЕСКИЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2016 |
|
RU2638941C1 |
Группа изобретений относится к сканирующей зондовой микроскопии. Сканирующий зондовый микроскоп включает вибрационный зондовый датчик, вертикальный привод для взаимного перемещения датчика и образца перпендикулярно плоскости сканирования, измерительный преобразователь сигналов от вибрационного зондового датчика, содержащий контроллер, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием по меньшей мере одного сдвоенного фазового синхронного смесителя и низкочастотных фильтров. Перед блоком USB вставлен блок гальванической развязки. По меньшей мере один сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации. 2 н. и 6 з.п. ф-лы, 1 ил.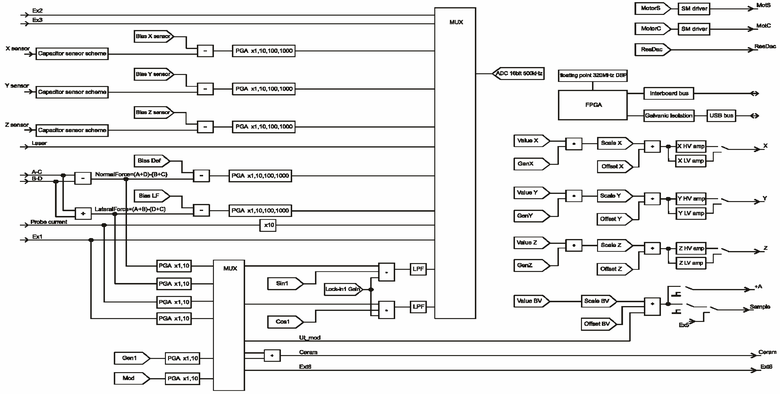
1. Сканирующий зондовый микроскоп, включающий вибрационный зондовый датчик, вертикальный привод для взаимного перемещения датчика и образца перпендикулярно плоскости сканирования, измерительный преобразователь сигналов от вибрационного зондового датчика, содержащий контроллер, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием по меньшей мере одного сдвоенного фазового синхронного смесителя и низкочастотных фильтров, причём перед блоком USB вставлен блок гальванической развязки, отличающийся тем, что по меньшей мере один сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации.
2. Сканирующий зондовый микроскоп по п.1, отличающийся тем, что контроллер микроскопа имеет модульную конструкцию.
3. Сканирующий зондовый микроскоп по п.1, отличающийся тем, что контроллер микроскопа включает кросс-плату и установленные на ней блок питания, плату AFM и плату высоковольтных усилителей.
4. Сканирующий зондовый микроскоп по п.1, отличающийся тем, что контроллер микроскопа дополнительно включает второй сдвоенный фазовый синхронный смеситель.
5. Контроллер сканирующего зондового микроскопа, включающий по меньшей мере одну цепь обратной связи, включающую цифровой процессор сигналов, связывающий выход измерительного преобразователя сигналов от вибрационного зондового датчика и вертикальный привод, программируемую вентильную матрицу, запрограммированную для выполнения прямого цифрового синтеза переменного сигнала, блок USB для связи с компьютером, средства обработки сигнала от измерительного преобразователя сигналов от вибрационного зондового датчика с использованием по меньшей мере одного сдвоенного фазового синхронного смесителя и низкочастотных фильтров, причём перед блоком USB вставлен блок гальванической развязки, отличающийся тем, что по меньшей мере один сдвоенный аналоговый фазовый синхронный смеситель установлен на плате цифрового сигнального процессора и выполнен с возможностью подачи выходного сигнала вначале на аналоговый фильтр третьего порядка, затем на мультиплексор, затем на цифровой сигнальный процессор для цифровой фильтрации.
6. Контроллер по п.5, отличающийся тем, что имеет модульную конструкцию.
7. Контроллер по п.5, включающий кросс-плату и установленные на ней блок питания, плату AFM и плату высоковольтных усилителей.
8. Контроллер по п.5, дополнительно включающий второй сдвоенный фазовый синхронный смеситель.
| US 7441447 B2, 28.10.2008 | |||
| CN 105807792 A, 27.07.2016 | |||
| US 7574327 B2, 11.08.2009. |

