Область применения
Устройство поиска и определения местоположения забрасываемых постановщиков помех (ЗПП) относится к области радиотехники и, конкретно, к системе определения местоположения радиотехническими комплексами и предназначено для оперативного поиска, определения местоположения и пространственного разрешения ЗПП, создающих активную шумовую помеху работе радиоэлектронных средств (РЭС).
Уровень техники
Известны устройства измерения координат объектов, которые являются источниками радиоизлучения. Среди них наиболее широкое применение получили устройства, основанные на использовании триангуляционного, угломерно-разностно-дальномерного и разностно-дальномерного способов измерения координат [Кондратьев, B.C. Многопозиционные радиотехнические системы / B.C. Кондратьев - М.: Радио и связь, 1986. - 264 с.].
Недостатками систем определения местоположения радиоизлучающих объектов, использующих данные способы [Свидетельство о регистрации программы для ЭВМ №2019661892 Программа моделирования процессов определения местоположения забрасываемых постановщиков помех / P.P. Мухамедов, В.В. Уткин, Д.С. Войнов, Р.А. Земляков, заявка 2019616262, дата поступления 29.05.2019, зарегистрировано 11.09.2019.], являются:
низкая точность пеленгования нескольких эквивалентных по мощности источников радиоизлучения;
неоднозначное определение местоположения радиоизлучающих объектов, если их число больше одного.
Наиболее близким аналогом (прототипом) предлагаемого устройства является [Пат. на изобретение №2620607 Российская Федерация Устройство поиска забрасываемых передатчиков помех / А.В. Васильев, С.Ч. Ивановский, И.В. Колбаско, - заявка 2016103831, приоритет 05.02.2016, зарегистрировано 29.05.2017.].
Работа устройства-прототипа происходит следующим образом.
Устройство состоит из двух приемных пунктов (подвижного и неподвижного) соединенных односторонней линией связи. Каждый приемный пункт имеет приемную антенну, соединенную с входом локационного приемника. Сигнал с выхода второго (неподвижного) приемного пункта по линии связи передается в первый приемный пункт (подвижный). После преобразования в цифровую форму сигналы передаются в планшетный компьютер (ПК) находящийся у оператора с подвижным приемным пунктом. В ПК сигналы поступают на вход коррелятора, где производится вычисление взаимно-корреляционной функции (ВКФ) посредством вычисления дискретной свертки принятых сигналов.
Далее в блоке порогового сравнения оцениваются задержки сигналов, соответствующие максимумам ВКФ в которых был превышен порог.
После чего в вычислителе гиперболических пеленгов производится расчет гиперболических пеленгов.
После построения гиперболических пеленгов производится перемещение подвижного приемного пункта на новую позицию, и описанная выше процедура обработки принятых сигналов и построения гиперболических пеленгов повторяется. Повторение процедуры происходит до тех пор, пока не будет набрана статистика, достаточная для установления местоположения ЗПП. Таким образом, для определения местоположения единичного ЗПП, достаточно двух гиперболических пеленгов, для определения местоположения каждого из нескольких ЗПП, работающих на одной частоте, требуется большее количество гиперболических пеленгов.
Недостатком устройства-прототипа является относительно низкая точность определения местоположения ЗПП, обусловленная влиянием шумовой составляющей и функционированием множества ИРИ с одинаковыми частотно-временными параметрами сигналов. Данные недостатки подтверждены в ходе имитационного моделирования [Свидетельство о регистрации программы для ЭВМ №2020660272 Программа моделирования процессов определения местоположения забрасываемых постановщиков помех разностно-дальномерным методом / М.Е. Камышев, P.P. Мухамедов, В.В. Уткин, Д.С. Войнов, Р.А. Земляков, заявка 2020619411, дата поступления 24.08.2020, зарегистрировано 01.09.2020.].
Цель изобретения - повышение точности определения местоположения ЗПП в условиях функционирования множества ИРИ с одинаковыми частотно-временными параметрами сигналов.
Сущность изобретения
Техническими результатами изобретения являются:
повышение точности определения местоположения каждого из нескольких ЗПП, работающих на одной частоте;
снижение времени установления местоположения каждого из нескольких ЗПП.
Указанные технические результаты достигаются тем, что в устройство поиска забрасываемых постановщиков помех, содержащее два приемных пункта (центральный и боковой), каждый из которых содержит приемную антенную систему с подключенным к ней радиоприемником, второй приемный пункт содержит передатчик линии связи, вход которого соединен с выходом радиоприемника того же пункта, первый приемный пункт содержит приемник линии связи дополнительно введены в первый приемный пункт двухканальный аналогово-цифровой преобразователь (АЦП), блок сопряжения с электронно-вычислительной машиной (БСЭВМ), приемник сигналов спутниковой радионавигационной системы (СРНС), блок оценки координат ЗПП (БОК-З) и блок индикации, причем первый вход двухканального АЦП соединен с выходом приемника линии связи, а второй с выходом радиоприемника первого приемного пункта, выходы двухканального АЦП соединены с входами БСЭВМ, выход которого соединен с программно реализованными последовательно соединенными двухканальным блоком блокирования мощных импульсов (ББМИ), БОК-З и блоком индикации, приемник сигналов СРНС соединен с БОК-З и блоком индикации, во второй приемный пункт введены антенна передатчика линии связи и передатчик линии связи.
Управление устройством поиска ЗПП осуществляется одним оператором. Оператором является пользователь, находящийся непосредственно на первом (центральном) приемном пункте.
Первый приемный пункт является центральным, второй - боковым.
Определение координат ЗПП производится усовершенствованным способом определения местоположения квазинепрерывного источника радиоизлучения на основе расчета следа разностной корреляционной матрицы сигналов [Пат. на изобретение №2733860 Российская Федерация Усовершенствованный способ определения местоположения квазинепрерывного источника радиоизлучения / Д.С. Войнов, А.А. Дружков, P.P. Мухамедов, С.А. Мущенко, В.В. Уткин - заявка 2020119704, приоритет 08.06.2020, зарегистрировано 07.10.2020.]. По результатам расчета следа разностно-корреляционной матрицы приема сигналов вычисляются пеленги, соответствующие возможным положениям ЗПП. Точка пересечения двух пеленгов позволяет установить местоположение ЗПП. Координаты центрального и бокового приемных пунктов определяются с помощью приемника сигналов СРНС. Для определения местоположения единичного ЗПП достаточно двух пеленгов. Для определения местоположения каждого из нескольких ЗПП требуется большее количество пеленгов.
Боковой приемный пункт, структурная схема которого приведена на (фиг. 1), состоит из приемной антенной системой 1, радиоприемника 2 и передатчика линии связи 3. Радиоприемник состоит из последовательно соединенных полосового фильтра 4, усилителя радиосигнала 5, смесителя 6 с гетеродином 7 и полосового фильтра 8. Передатчик линии связи 3 подключен к антенне передатчика линии 9.
Центральный приемный пункт, структурная схема которого приведена на (фиг. 2), состоит из приемной антенной системы 10, радиоприемника 11, антенны приемника линии связи 12, приемника линии связи 13, двухканального АЦП 14, БСЭВМ 15, электронно-вычислительная машина (ЭВМ) 16 с встроенным приемником сигналов СРНС 17, а также последовательно соединенных двухканального ББМИ 18, БОК-З 19 и блока индикации 20. Радиоприемник 11 состоит из последовательно соединенных полосового фильтра 21, усилителя радиосигнала 22, смесителя 23 с гетеродином 24 и полосового фильтра 25.
Центральный и боковой приемные пункты имеют идентичные приемные антенные системы 1 и 10 и радиоприемники 2 и 11. Рабочая частота настройки и полоса пропускания радиоприемников соответствуют рабочей частоте и полосе пропускания приемника РЭС, которому ЗПП создают помеху. Вне зависимости от частотного диапазона поиска ЗПП используются ненаправленные приемные антенны 1 и 10, что обеспечивает прием сигналов со всех азимутальных направлений.
Линия связи состоит из передатчика 3 с антенной 9 и приемника 13 с антенной 12.
Изобретение иллюстрируется следующими чертежами:
Фиг. 1. Структурная схема бокового приемного пункта.
Цифрами обозначены:
1 - приемная антенная система;
2 - радиоприемник;
3 - передатчик линии связи;
4 - полосовой фильтр;
5 - усилитель радиосигнала;
6 - смеситель;
7 - гетеродин;
8 - полосовой фильтр;
9 - антенна передатчика линии связи.
Фиг. 2. Структурная схема центрального приемного пункта.
Цифрами обозначены:
10 - приемная антенная система;
11 - радиоприемник;
12 - антенна приемника линии связи;
13 - приемник линии связи;
14 - двухканальный АЦП;
15 - блок сопряжения с ЭВМ (БСЭВМ);
16 - ЭВМ;
17 - приемник сигналов СРНС;
18 - двухканальный блок блокирования мощных импульсов (ББМИ);
19 - блок оценки координат ЗПП (БОК-З);
20 - блок индикации;
21 - полосовой фильтр;
22 - усилитель радиосигнала;
23 - смеситель;
24 - гетеродин;
25 - полосовой фильтр.
Фиг. 3. Пример отображения информации на экране ЭВМ
Условными символами обозначены:
треугольники - позиции приемных пунктов;
перевернутые треугольники - точки размещения обнаруженных ЗПП;
пунктирные линии - пеленги;
Фиг. 4. Внешний вид центрального приемного пункта.
Цифрами обозначены:
10 - приемная антенная система;
12 - антенна приемника линии связи;
16 - ЭВМ;
26 - корпус с аппаратурой;
27 - штанга;
28 - кабель сверхвысокой частоты.
Фиг. 5 Внешний вид бокового приемного пункта.
1 - приемная антенная система;
9 - антенна передатчика линии связи;
29 - корпус с аппаратурой;
30 - штанга.
Работа устройства осуществляется следующим образом.
Установка бокового приемного пункта осуществляется заглублением штанги 30 в грунт. После установки и включения бокового приемного пункта производится включение центрального приемного пункта. Расстояние между приемными пунктами может быть от 10 до 2000 метров, что определяется на основе анализа результатов имитационного моделирования, полученных с использованием специального программного обеспечения, прошедшего государственную регистрацию - [Свидетельство о регистрации программы для ЭВМ №2019661892 Программа моделирования процессов определения местоположения забрасываемых постановщиков помех / Д.С. Войнов, В.В. Уткин, P.P. Мехамедов, заявка 2019616262, дата поступления 29.05.2019, зарегистрировано 11.09.2019]. Центральным и боковым приемными пунктами производится автоматическое определение координат при помощи приемника сигналов СРНС 17 и их запоминание, таким образом, в центральный приемный пункт вводятся координаты позиции бокового приемного пункта. Одновременно с этим производится прием сигналов ЗПП обоими приемными пунктами, передача принятого сигнала с бокового на центральный приемный пункт.
Боковой приемный пункт производит интервальный прием сигналов с τ=1 мс и их передачу по линии связи на центральный приемный пункт. Центральный приемный пункт, аналогично боковому, производит постоянный прием сигналов. Принимаемые сигналы могут содержать сигналы помех, создаваемые ЗПП, а также импульсные сигналы РЭС, которым ЗПП создают помехи. Принимаемые сигналы преобразовываются в цифровую форму при помощи двухканального АЦП 14.
Структурная схема бокового приемного пункта приведена на (фиг. 1). Сигнал, принятый приемной антенной системой 1 бокового приемного пункта, поступает в радиоприемник 2, где фильтруется полосовым фильтром 4, усиливается усилителем радиосигнала 5, переносится на промежуточную частоту при помощи смесителя 6 с гетеродином 7, фильтруется полосовым фильтром 8. С выхода радиоприемника 2 сигнал поступает в передатчик линии связи 3 и далее в антенну передатчика линии связи 9. Антенны 1 и 9 ненаправленные.
Сигнал, излученный антенной передатчика линии связи 9, принимается антенной приемника линии связи 12 центрального приемного пункта, структурная схема которого приведена на (фиг. 2). Сигнал, принятый приемной антенной системой 10 центрального приемного пункта, поступает в радиоприемник 11, где фильтруется полосовым фильтром 21, усиливается усилителем радиосигнала 22, переносится на промежуточную частоту при помощи смесителя 23 с гетеродином 24, фильтруется полосовым фильтром 25. Далее оба сигнала (принятый с бокового приемного пункта и принятый центральным приемным пунктом) поступают на входы двухканального АЦП 14. С выхода двухканального АЦП 14 сигналы через БСЭВМ 15 поступают на ЭВМ 16.
На ЭВМ 16 при помощи специального программного обеспечения производится следующая обработка принятых сигналов.
В соответствии с результатами, полученными в [Пат. на изобретение №2733860 Российская Федерация Усовершенствованный способ определения местоположения квазинепрерывного источника радиоизлучения / Д.С. Войнов, А.А. Дружков, P.P. Мухамедов, С.А. Мущенко, В.В. Уткин - заявка 2020119704, приоритет 08.06.2020, зарегистрировано 07.10.2020.] в БОК-З 19 реализован алгоритм расчета следа разностной корреляционной матрицы и оценки координат ЗПП, в котором:
1. Формируется  интервалы наблюдения длительностью tн, на которых рассчитывается корреляционная матрица сигналов Rxx(m) входной реализации квазинепрерывного сигнала ЗПП по формуле:
интервалы наблюдения длительностью tн, на которых рассчитывается корреляционная матрица сигналов Rxx(m) входной реализации квазинепрерывного сигнала ЗПП по формуле:

где |xm| - амплитуда сигнала ЗПП;  - дисперсия шума;
- дисперсия шума; 
 ,
,  , i≠j, - фазовые сдвиги в антенных элементах: где d0 - расстояние между антенными элементами решетки; i, j - номера антенных элементов; λ - длина волны сигнала; φ - угол прихода волны от ЗПП;
, i≠j, - фазовые сдвиги в антенных элементах: где d0 - расстояние между антенными элементами решетки; i, j - номера антенных элементов; λ - длина волны сигнала; φ - угол прихода волны от ЗПП;
2. Рассчитывается след разностной корреляционной матрицы  с последующим формированием и нормированием зависимости
с последующим формированием и нормированием зависимости  в интересах построения линий положений;
в интересах построения линий положений;
3. Вычисляется взаимно-корреляционная функция зависимости  по формуле:
по формуле: 
4. Выполняется дополнительная операция процедуры шумоподавления на основе дискретного S-преобразования;
5. Определяются разности хода для каждой позиции по максимуму огибающей взаимной корреляционной функции системой взаимной корреляционной обработки;
6. Оцениваются координаты источника квазинепрерывного сигнала разностно-дальномерным способом на основе анализа временной зависимости следа разностно-корреляционных матриц сигналов, формируемых в антенных элементах центрального и бокового приемных пунктов.
Индикация пеленгов осуществляется блоком индикации 20. Кроме пеленгов, блоком индикации 20 на экране ЭВМ 16 отображаются текущие позиции бокового и центрального приемных пунктов, представленных на (фиг. 3).
Началом координат системы отображения пеленгов является позиция центрального приемного пункта.
Двухканальный ББМИ 18, БОК-З 19 и блок индикации 20 реализованы в виде специального программного обеспечения на ЭВМ 16.
На (фиг. 3) приведен пример отображения информации на экране ЭВМ 16. В прямоугольной системе координат плоскости (местности) приведены: позиции приемных пунктов (треугольники), точки размещения ЗПП (перевернутые треугольники) и пеленги (пунктирные линии). Слева на (фиг. 3) отображена панель управления оператора центрального пункта приема. Как видно из (фиг. 3), пеленги пересекаются в точках нахождения ЗПП.
Обнаружение и определение однозначного местоположения нескольких ЗПП происходит одновременно, чем достигается снижение времени установления местоположения каждого ЗПП (фиг. 6), что подтверждено в ходе проведения натурного эксперимента (фиг. 7, 8). Импульсные сигналы РЭС не оказывают влияния на поиск ЗПП, благодаря работе ББМИ 18. Определение местоположения источника происходит двумя неподвижными пунктами приема.
Боковой приемный пункт (фиг. 5) конструктивно состоит из корпуса с аппаратурой 29 с размещенной в его верхней части приемной антенной системой 1 и антенной передатчика линии связи 9. В нижней части корпуса с аппаратурой 29 закреплена штанга 30. Штанга 30 представляет собой отрезок трубы длиной 1-2 м с заостренным нижним концом. Установка бокового приемного пункта производится путем заглубления в грунт штанги 30 в вертикальном положении. В корпусе с аппаратурой 29 находятся радиоприемник 2, передатчик линии связи 3 и автономный источник электропитания.
Центральный приемный пункт (фиг. 4) конструктивно состоит из приемной антенной системы 10, корпуса с аппаратурой 26 и ЭВМ 16. Корпус с аппаратурой 26 закреплен на штангу 27 длиной 1-2 м с заостренным нижним концом, установка центрального приемного пункта производится путем заглубления в грунт штанги 27 в вертикальном положении. В верхней части корпуса закреплена приемная антенная система 10 и антенна приемника линии связи 12. Корпус содержит: радиоприемник 11, приемник линии связи 13, двухканальной АЦП 14, БСЭВМ 15 и автономный источник электропитания.
Таким образом, устройство поиска и определения местоположения забрасываемых постановщиков помех позволяет однозначно определять местоположение каждого из нескольких ЗПП, работающих на одной частоте, с повышенной точностью на фоне импульсных сигналов РЭС двумя неподвижными пунктами посредством расчета следа разностной корреляционной матрицы, реализованного в виде специального программного обеспечения в БОК-З 19, разработанного на основе [Пат. на изобретение №2733860 Российская Федерация Усовершенствованный способ определения местоположения квазинепрерывного источника радиоизлучения / Д.С. Войнов, А.А. Дружков, P.P. Мухамедов, С.А. Мущенко, В.В. Уткин - заявка 2020119704, приоритет 08.06.2020, зарегистрировано 07.10.2020.], что позволяет достигнуть заявленных технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ЗАБРАСЫВАЕМЫХ ПЕРЕДАТЧИКОВ ПОМЕХ | 2016 |
|
RU2620607C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КВАЗИНЕПРЕРЫВНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2733860C1 |
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322681C2 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| Способ определения местоположения квазинепрерывного широкополосного источника радиоизлучения мобильным комплексом радиотехнического наблюдения | 2017 |
|
RU2645297C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |




Изобретение относится к области радиотехники и, конкретно, к системе определения местоположения радиотехническими комплексами и предназначено для оперативного поиска, определения местоположения и пространственного разрешения забрасываемых постановщиков помех (ЗПП), создающих активную шумовую помеху работе радиоэлектронных средств (РЭС). Техническим результатом изобретения является повышение точности и снижение времени определения местоположения каждого из нескольких ЗПП, работающих на одной частоте. Устройство поиска и определения местоположения забрасываемых постановщиков помех содержит два неподвижных приемных пункта - центральный и боковой, каждый из которых включает в себя антенную систему и радиоприемник квазинепрерывных излучений забрасываемых постановщиков помех. Центральный и боковой приемные пункты объединены между собой линией связи. Центральный приемный пункт включает в себя блок оценки координат ЗПП, в котором вычисляется след  разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП и взаимной корреляционной функции следа разностно-корреляционных матриц сигналов ЗПП, выполняется дополнительная процедура шумоподавления на основе дискретного S-преобразования полученной зависимости следа разностно-корреляционных матриц сигналов ЗПП, определяется разность хода для каждой позиции по максимуму ее огибающей и оцениваются координаты ЗПП разностно-дальномерным способом на основе анализа временной зависимости следа разностно-корреляционных матриц сигналов ЗПП. След разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП формируется в антенных элементах центрального и бокового приемных пунктов. 8 ил.
разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП и взаимной корреляционной функции следа разностно-корреляционных матриц сигналов ЗПП, выполняется дополнительная процедура шумоподавления на основе дискретного S-преобразования полученной зависимости следа разностно-корреляционных матриц сигналов ЗПП, определяется разность хода для каждой позиции по максимуму ее огибающей и оцениваются координаты ЗПП разностно-дальномерным способом на основе анализа временной зависимости следа разностно-корреляционных матриц сигналов ЗПП. След разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП формируется в антенных элементах центрального и бокового приемных пунктов. 8 ил.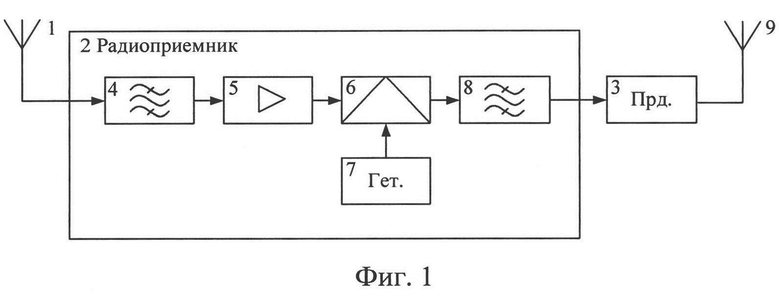
Устройство поиска и определения местоположения забрасываемых постановщиков помех, содержащее два неподвижных приемных пункта - центральный и боковой, каждый из которых включает в себя антенную систему и радиоприемник квазинепрерывных излучений забрасываемых постановщиков помех (ЗПП), и объединенных между собой линией связи, отличающееся тем, что в центральный приемный пункт включен блок оценки координат ЗПП, выполненный с возможностью вычисления следа  разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП, формируемого в антенных элементах центрального и бокового приемных пунктов, и взаимной корреляционной функции следа разностно-корреляционных матриц сигналов ЗПП, выполнения дополнительной процедуры шумоподавления на основе дискретного S-преобразования полученной зависимости следа разностно-корреляционных матриц сигналов ЗПП, определения разности хода для каждой позиции по максимуму ее огибающей и оценивания координаты ЗПП разностно-дальномерным способом на основе анализа временной зависимости следа разностно-корреляционных матриц сигналов ЗПП.
разностной корреляционной матрицы Rхх(m) сигналов входного квазинепрерывного сигнала ЗПП, формируемого в антенных элементах центрального и бокового приемных пунктов, и взаимной корреляционной функции следа разностно-корреляционных матриц сигналов ЗПП, выполнения дополнительной процедуры шумоподавления на основе дискретного S-преобразования полученной зависимости следа разностно-корреляционных матриц сигналов ЗПП, определения разности хода для каждой позиции по максимуму ее огибающей и оценивания координаты ЗПП разностно-дальномерным способом на основе анализа временной зависимости следа разностно-корреляционных матриц сигналов ЗПП.
| УСТРОЙСТВО ПОИСКА ЗАБРАСЫВАЕМЫХ ПЕРЕДАТЧИКОВ ПОМЕХ | 2016 |
|
RU2620607C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КВАЗИНЕПРЕРЫВНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2733860C1 |
| Способ определения местоположения квазинепрерывного широкополосного источника радиоизлучения мобильным комплексом радиотехнического наблюдения | 2017 |
|
RU2645297C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2476900C1 |
| CN 107037410 A, 11.08.2017 | |||
| US 9640866 B2, 02.05.2017 | |||
| CN 105911517 A, 31.08.2016 | |||
| ГАТЧИН Ю.А., КАРПИК А.П., ТКАЧЕВ К.О., ЧИКОВ К.Н., ШЛИШЕВСКИЙ В.Б | |||
| Теоретические основы защиты информации от утечки по акустическим каналам [Текст]: учеб | |||

