Предлагаемые объекты объединены одним изобретательским замыслом, относятся к робототехническим комплексам радиоэлектронной борьбы (РЭБ), предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах.
Известен способ, реализованный комплектом малогабаритных заносимых передатчиков помех РП-377А. Содержит набор литеров передатчиков помех, пульт дистанционного управления, блоки питания. В заданный район оборудования доставляется группой специального назначения. Основным недостатком способа доставки является подверженность риску людей, низкая мобильность, ограниченное время работы.
Известен способ доставки постановщиков радиопомех (см. Пат. РФ №2361233, МПК G01S 7/38, опубл. 10.07.2009 г.), основанный на предварительной доставке в район местоположения радиоэлектронного средства неуправляемым носителем источника инфракрасного излучения и навигационного приемника, определении по сигналу навигационного приемника координат местоположения источника инфракрасного излучения, по известным значениям координат точки доставки постановщика помех и местоположения источника инфракрасного излучения определении значения угловых отклонений полета самонаводящегося носителя постановщика радиопомех от направления на источник инфракрасного излучения, внесении значения угловых отклонений в систему самонаведения на инфракрасное излучение носителя постановщика помех, осуществлении пуска самонаводящегося носителя постановщика радиопомех и доставке его в расчетную точку.
Недостатки способа-аналога состоят в следующем. Низкая точность доставки постановщиков помех объясняется отсутствием корреляции углового отклонения полета самонаводящегося носителя (снаряда) и распространением радиоволн. Некоторое увеличение точности доставки постановщика помех достигается за счет существенного усложнения системы в целом. В рамках управляемого снаряда реализуется незначительная мощность передатчика помех и ограниченное время его работы. Последнее резко снижает эффективность применения способа-аналога особенно в условиях низкой точности доставки средств РЭБ. Кроме того, существенную трудность представляет техническая реализация рассматриваемых средств доставки из-за существенной перегрузки оборудования в моменты выстрела и контакта с землей.
Наиболее близким по технической сущности является способ доставки постановщиков помех на беспилотном летательном аппарате (см. Пат. РФ №2353891, МПК F41H 13/00, опубл. 27.04.2009 г. «Беспилотный робототехнический комплекс дистанционного мониторинга и блокирования потенциально опасных объектов воздушными роботами, оснащенными интегрированной системой поддержки принятия решения по обеспечению требуемой эффективности их применения»). Способ-прототип заключается в том, что доставку постановщиков помех осуществляют с помощью беспилотных летательных аппаратов (БПЛА), управляемых с поста дистанционного управления (ПДУ) по беспроводному каналу.
Существенная часть задач по ведению РЭБ в вооруженных силах развитых государств возлагается на системы и средства воздушного базирования, при этом БПЛА обладают рядом преимуществ перед пилотируемыми средствами, в первую очередь - это отсутствие риска для жизни человека. Кроме того, при использовании БПЛА проще использовать технологии обеспечения малой заметности, что позволяет приблизится к цели на более близкое расстояние. Последнее обстоятельство, в свою очередь, снижает энергетические затраты на постановку помех. Одновременно обеспечивается электромагнитная совместимость с радиосредствами своих войск. В настоящее время размещение на БПЛА систем и средств РЭБ получают наибольшее распространение на тактическом уровне, где они могут применяться с максимальной эффективностью (см. В. Евграфов. Перспективы использования зарубежными вооруженными силами беспилотных летательных аппаратов для решения задач РЭБ. Интернет-ресурс http://pentagonus.ru/publ/perspektivy-ispolzovanija-zarubezhnymi-…). Наиболее перспективными для оснащения средствами РЭБ считаются малые и средние БПЛА.
Однако способу-прототипу присущ недостаток. Постановщики помех на БПЛА обладают ограниченным энергетическим и временным ресурсом.
Целью предлагаемого способа доставки постановщиков помех является снятие ограничений на энергетические и временные ресурсы постановщиков помех благодаря комплексированию средств РЭБ и оптимизации процессов управления ими.
Поставленная цель достигается тем, что в известном способе доставки постановщиков помех, заключающемся в том, что для доставки постановщиков помех используют управляемые с поста дистанционного управления по беспроводному каналу носители БПЛА РЭБ, дополнительно используют забрасываемые передатчики помех (ЗПП). При этом доставку ЗПП в заданный район осуществляют на БПЛА РЭБ. Управление ЗПП выполняют с ПДУ опосредованно по беспроводному каналу связи через ретранслятор, устанавливаемый на борту БПЛА РЭБ.
ЗПП выполняют в виде небольших маневренных планеров, «цикад», парашютирующих крыльев, планирующих бомб, надувных воздушных змеев и др.
Благодаря новой совокупности существенных признаков за счет того, что дополнительно вводятся многочисленные забрасываемые передатчики помех, многократную доставку которых осуществляют на БПЛА РЭБ, а также организации гарантированного управления ими, позволяет снять ограничения на энергетические и временные ресурсы постановщиков помех.
Известен комплекс на базе БПЛА РЭБ «Мошкара», предназначенный для энергетического подавления современных УКВ войсковых линий радиосвязи (Павлушенко М. Беспилотные летательные аппараты: история применения. См. интернет ресурс http://bwbooks.net/index.php?idl=4&category=tehnika&author=pavlushenko-m&book=2005). Дальность действия комплекса 30 км с возвратом БПЛА, 60 км - без возврата БПЛА РЭБ. Радиус подавления типовых радиолиний в УКВ-диапазоне 10 км, время полета один час, из них 30 минут - работа на излучение. Пункт управления представляет собой персональный компьютер с радиомодемом.
В качестве недостатка устройства-аналога следует отметить существенные ограничения по энергетическим характеристикам навесного оборудования, незначительное время продолжительности полета БПЛА (3-4 часа) и малая дальность полета (до 70 км).
Наиболее близким к предлагаемому является беспилотный робототехнический комплекс (см. Пат. РФ №2353891, МПК F41H 13/00, опубл. 27.10.2007 г.).
Устройство-прототип содержит транспортно-пусковую установку высокой проходимости, пункт дистанционного управления и, по крайней мере, три одновременно применяемых в качестве воздушных роботов беспилотных летательных аппарата, причем каждый БПЛА РЭБ выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных выходов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемопередающего модуля, последовательно соединенные радиоприемное устройство, запоминающее устройство и группа информационных входов второго приемопередающего модуля, блок навигации БПЛА РЭБ, группа информационных выходов которого соединена со второй группой информационных входов запоминающего устройства, и передатчик радиопомех, группа входов управления которого соединена с группой информационных выходов второго приемопередающего модуля, а пункт дистанционного управления выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой М БПЛА РЭБ, третий приемопередающий модуль и первое устройство обработки и отображения информации, последовательно соединенные второй блок управления, предназначенный для анализа радиоэлектронной обстановки и формирования команд на радиоподавление, и второе устройство обработки и отображения информации, вторая группа информационных входов объединена с группой информационных входов первого и второго блоков управления, вторая группа выходов которого соединена с группой информационных входов четвертого приемопередающего модуля.
Устройство-прототип обеспечивает радиомониторинг в заданном районе и при необходимости формирование преднамеренных помех совокупностью передатчиков, установленных на М БПЛА РЭБ, что обеспечивает блокирование назначенных для этого радиоканалов.
В качестве недостатков прототипа следует отметить ограничения по энергетическим характеристикам навесного оборудования и незначительное время продолжительности полета БПЛА РЭБ, из-за чего падает эффективность радиоподавления средств связи.
Целью предлагаемого технического решения является повышение эффективности радиоподавления средств радиосвязи в заданном районе и частотном диапазоне благодаря комплексированию средств РЭБ и оптимизации процессов управления ими.
Поставленная цель достигается тем, что в известном беспилотном робототехническом комплексе радиоэлектронной борьбы, состоящем из транспортно-пусковой установки высокой проходимости, пункта дистанционного управления и, по крайней мере, трех одновременно применяемых в качестве воздушных роботов беспилотных летательных аппаратов радиоэлектронной борьбы, причем каждый БПЛА РЭБ выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемопередающего модуля, последовательно соединенные радиоприемное устройство, запоминающее устройство и группа информационных входов второго приемопередающего модуля, блок навигации БПЛА РЭБ, группа информационных выходов которого соединена со второй группой информационных входов запоминающего устройства, и передатчик радиопомех, группа входов управления которого соединена с группой информационных выходов второго приемопередающего модуля, а пункт дистанционного управления выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой М БПЛА РЭБ, третий приемопередающий модуль и первое устройство обработки и отображения информации, последовательно соединенные четвертый приемопередающий модуль, второй блок управления, предназначенный для анализа радиоэлектронной обстановки и формирования команд на радиоподавление, и второе устройство обработки и отображения информации, вторая группа информационных входов которого объединена с группой информационных входов первого блока управления и первой группой входов второго блока управления, вторая группа выходов которого соединена с группой информационных входов четвертого приемопередающего модуля, дополнительно введено N забрасываемых передатчиков помех (ЗПП), в пункт дистанционного управления введен шестой приемопередающий модуль, группа информационных входов которого соединена с третьей группой выходов второго блока управления, а группа информационных выходов соединена со второй группой входов второго блока управления, в каждый БПЛА РЭБ дополнительно введен пятый приемопередающий модуль, предназначенный для ретрансляции сигналов управления ЗПП, формируемый ПДУ и приема сообщений о их координатах, устройство сброса ЗПП, группа входов управления которого объединена с группой входов управления передатчика помехи и радиоприемного устройства.
При этом забрасываемый передатчик помех содержит последовательно соединенные приемопередающий модуль, блок управления и передатчик помех заданного диапазона частот, блок навигации, группа информационных выходов которого соединена со второй группой входов блока управления, предназначенного для преобразования команд управления ПДУ к виду, необходимому для нормальной работы передатчика помех и закрытия информации о местоположении ЗПП, вторая группа выходов которого соединена с группой информационных входов приемопередатчика.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения: обеспечить повышение эффективности радиоподавления средств радиосвязи в заданном районе местности и частотном диапазоне.
Предлагаемые объекты поясняются чертежами, на которых показаны:
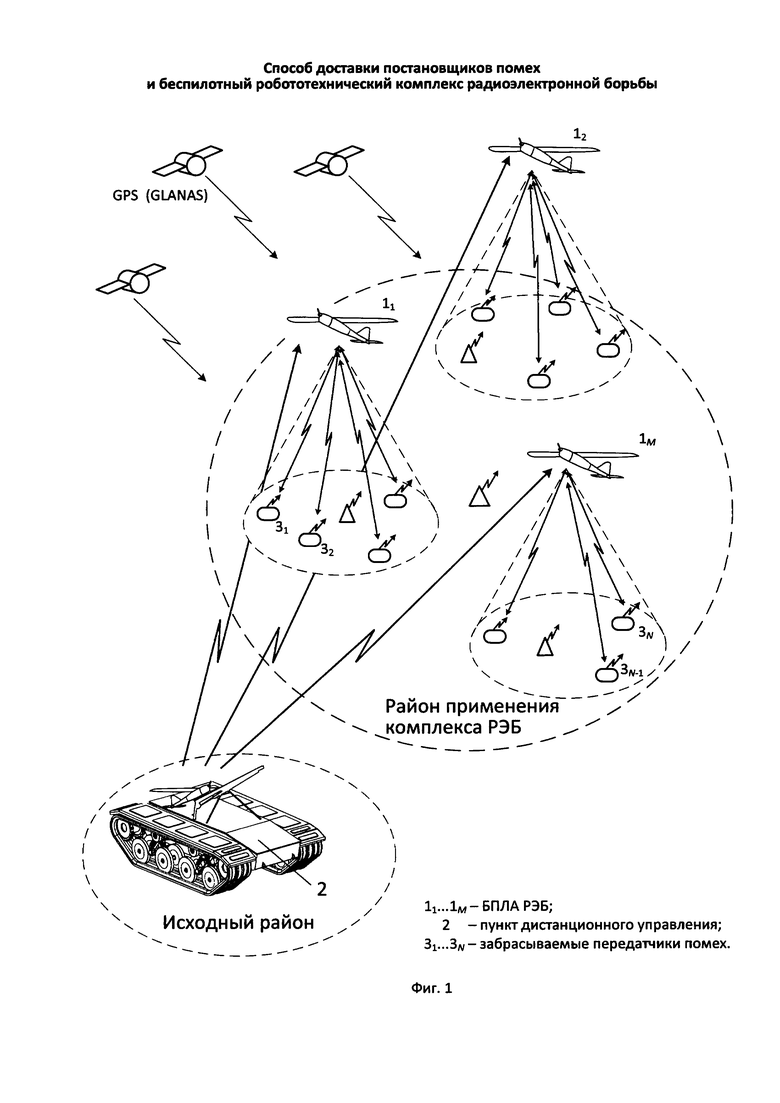
на фиг. 1 - иллюстрируется вариант типового применения беспилотного робототехнического комплекса радиоэлектронной борьбы;
на фиг. 2 - обобщенная структурная схема БПЛА РЭБ и пункта дистанционного управления;
на фиг. 3 - обобщенный алгоритм доставки постановщиков помех;
на фиг. 4 - обобщенная структурная схема ЗПП.
Сущность предлагаемого способа состоит в следующем (см. фиг. 1 и 3). Операторы пункта дистанционного управления задают район барражирования для М БПЛА РЭБ, определяют частоты для организации радиосвязи с ними и забрасываемыми передатчиками помех. По команде ПДУ организуют запуск БПЛА РЭБ. При использовании для этой цели БПЛА «Орлан-10» или «Орлан-30», производства ООО «СТЦ», г. Санкт-Петербург, ПДУ в состоянии одновременно управлять полетом четырех воздушных роботов. После прибытия в заданный район последние приступают к радиомониторингу. Принятые на борту БПЛА РЭБ радиосигналы в заданной полосе частот передают на ПДУ. Здесь осуществляют анализ принятых сигналов и принимают решение на порядок их подавления.
В случае если в заданном районе не обнаружены радиоизлучения заданных классов по команде ПДУ БПЛА РЭБ перемещают в другой район или возвращают на исходную позицию.
При обнаружении сигналов уточняют их характеристики, определяют необходимый комплект ЗПП (по диапазону частот и их количеству). Незначительное число источников радиоизлучений (ИРИ) по команде с ПДУ может быть подавлено с помощью передатчиков помех, находящихся на борту БПЛА РЭБ. Принятие решения на использование ЗПП предполагает сброс последних, находящихся на борту БПЛА, в заданном районе. После этого БПЛА РЭБ возвращают в исходный район. Посадка «Орланов» осуществляется с помощью парашюта и надувной подушки. Пополнив запасы ЗПП необходимых диапазонов частот и горючего (при необходимости) БПЛА РЭБ по команде ПДУ взлетают и направляются в заданный район. Данная операция продолжается до тех пор, пока не будет доставлено необходимое количество ЗПП.
Сбрасываемые с М БПЛА РЭБ ЗПП планируют благодаря приданию их конструкции специальной формы. Это позволяет снизить требования к исполнению ЗПП по перегрузкам при контакте с землей. После приземления ЗПП определяют (уточняют) свое местоположение с помощью блока навигации, результаты передают на ПДУ через ретрансляторы соответствующих БПЛА РЭБ и ожидают дальнейших управляющих команд.
Диаграмма направленности антенны связи ЗПП направлена вверх в направлении, откуда ожидается поступление команд управления с борта БПЛА РЭБ. Это обеспечивает как скрытность радиообмена, так и его помехозащищенность.
После доставки необходимого комплекта ЗПП в район их использования БПЛА РЭБ продолжают в нем (с учетом уточненных координат) барражировать в ожидании прохождения команды на применение средств РЭБ. Следует отметить, что «Орлан-10» может непрерывно находиться в воздухе до 16 часов. Команда на применение средств РЭБ с ПДУ передается раздельно по каналу управления БПЛА РЭБ и каналам управления ЗПП. Причем команды управления ЗПП ретранслируются на борту используемых БПЛА РЭБ. Задачи по радиоподавлению для БПЛА РЭБ и ЗПП могут отличаться и зависеть от оперативной обстановки.
После завершения энергетического ресурса ЗПП или по команде с ПДУ с помощью приемных трактов БПЛА РЭБ (на ПДУ) оценивают эффективность применения средств РЭБ и далее возвращают их на исходную позицию. При необходимости повторного помехового воздействия в этом или другом районе рассмотренные операции повторяют. Кроме того, возможно выборочное подавление ИРИ путем подключения соответствующих по частотному диапазону ЗПП.
В результате выполнения названных операций достигается радиоподавление ИРИ в заданном районе в непосредственной близости от них. Последнее обеспечивает существенный выигрыш по энергетике формируемых радиопомех при отсутствии негативного воздействия на радиосредства своих войск. Суммарная мощность помех N ЗПП может превышать на порядок и более общую мощность деструктивного воздействия М БПЛА РЭБ. Кроме того, с помощью ретрансляторов, размещенных на БПЛА РЭБ обеспечивают устойчивое управление всеми ЗПП.
Беспилотный робототехнический комплекс радиоэлектронной борьбы (см. фиг. 1, 2 и 4) включает в свой состав транспортно-пусковую установку, в которой размещается пункт дистанционного управления 2, М одновременно применяемых в качестве воздушных роботов беспилотных летательных аппаратов РЭБ 11…1М, комплект из N забрасываемых передатчиков помех 31…3N, причем каждый БПЛА РЭБ 11…1М выполнен содержащим последовательно соединенные контроллер 1.6, рулевой привод 1.7 и аэродинамические рули 1.9, автопилот 1.2, группа информационных входов которого соединена с второй группой информационных выходов котроллера 1.6, первая группа информационных входов которого соединена с группой информационных выходов автопилота 1.2, двигательную установку 1.1, группа информационных входов которой соединена с третьей группой информационных выходов контроллера 1.6, первый приемопередающий модуль 1.8, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера 1.6, вторая группа информационных входов соединена с группой информационных выходов первого приемопередающего модуля 1.8, последовательно соединенные радиоприемное устройство 1.3, запоминающее устройство 1.4 и группа информационных входов второго приемопередающего модуля 1.10, блок навигации БПЛА РЭБ 1.5, группа информационных выходов которого соединена со второй группой информационных входов запоминающего устройства 1.4, передатчик помех 1.11, группа входов управления которого соединена с группой информационных выходов второго приемопередающего модуля 1.10, и пятый приемопередатчик 1.12, а пункт дистанционного управления 2 выполнен содержащим последовательно соединенные первый блок управления 2.1, предназначенный для управления взлетом, полетом и посадкой М БПЛА РЭБ, третий приемопередающий модуль 2.2 и первое устройство обработки и отображения информации 2.6, последовательно соединенные четвертый приемопередающий модуль 2.3, второй блок управления 2.7, предназначенный для анализа радиоэлектронной обстановки и формирования команд на радиоподавление М БПЛА РЭБ 11…1М и N ЗПП 31…3N, и второе устройство обработки и отображения информации 2.4, вторая группа информационных входов которого объединена с группой информационных входов первого блока управления 2.1 и первой группой входов второго блока управления 2.7, вторая группа выходов которого соединена с группой информационных входов четвертого приемопередающего модуля 2.3, и шестой приемопередающий модуль 2.5, группа информационных входов которого соединена с третьей группой выходов второго блока управления 2.7, а группа информационных выходов блока 2.5 соединена со второй группой входов блока 2.7, каждый из N ЗПП 3 содержит последовательно соединенные приемопередающий модуль 3.1, блок управления 3.2 и передатчик помех заданного диапазона частот 3.3, блок навигации 3.4, группа информационных выходов которого соединена со второй группой входов блока управления 3.2, вторая группа выходов которого соединена с группой информационных входов приемопередатчика 3.1, а группа входов управления устройства сброса ЗПП 1.13 объединена с группой входов управления передатчика помех 1.11 и радиоприемного устройства 1.3.
Работа беспилотного робототехнического комплекса РЭБ осуществляется следующим образом (см. фиг. 2 и 4). На подготовительном этапе ПДУ 2 определяет район анализа радиоэлектронной обстановки и применения средств РЭБ, диапазон частот для выполнения радиомониторинга в заданном районе, радиоданные для организации связи ПДУ 2 - БПЛА РЭБ 11…1М, ПДУ 2 - ЗПП 31…3N.
По команде с ПДУ 2 взлетают от одного до четырех БПЛА РЭБ 1 (при использовании «Орлан-10» или «Орлан-30»). Последние по сравнению с прототипом на своем борту дополнительно несут по несколько ЗПП 3. При выходе в заданный район БПЛА РЭБ переходят в режим барражирования. Управление полетом БПЛА РЭБ осуществляют с помощью блоков 2.1, 2.2 и 2.6 пункта дистанционного управления 2 по низкоскоростным каналам связи на частотах 900-920 МГц в режиме псевдослучайной перестройки частоты. По этим каналам (тракты 1.8…1.8M соответствующих БПЛА и блок 2.2) осуществляют задание маршрута полета, высоту и порядок облета: проход на высоте или барражирование и т.д. Управляющая информация формируется с помощью блока 2.1 для всех БПЛА РЭБ. В качестве блока 2.1 может быть использован ноутбук.
В качестве БПЛА 11…1M целесообразно использовать серийно выпускаемый Обществом с ограниченной ответственностью «Специальный технологический Центр», г. Санкт-Петербург, БПЛА «Орлан-10» или «Орлан-30» (см. https://ru.wikipedia.org/wiki/%D0%9E%D 1%80%D0%BB%D0%B0%D0%BD-10). Масса полезной нагрузки составляет 5 кг (для «Орлан-10»), способ старта - с разборной катапульты, приземление на парашюте. Воздушная скорость БПЛА 90-150 км/ч, максимальная продолжительность полета 16 часов, максимальная дальность полета 600 км, максимальная высота - 5 км. Дальность связи зависит от высоты полета и местных условий и в среднем составляет 100-130 км.
В районе барражирования БПЛА РЭБ 1 осуществляют прием радиоканалов в заданном диапазоне частот с помощью блоков 1.3 и их ретрансляцию на ПДУ 2 по высокоскоростному каналу связи (блоки 1.10 и 2.3) на частотах 2000-2500 мГц. Скорость передачи информации в канале составляет 4 Мбит/с. С помощью блоков 2.4 и 2.7 осуществляют обнаружение, распознавание и принятие решения на подавление, а также формирование команд на радиоподавление индивидуально для БПЛА РЭБ 11…1M и ЗПП 31…3N в полосе частот Δƒп.
Если в заданном районе не обнаружены радиоизлучения определенных классов на ПДУ 2 принимают решение о изменении района барражирования БПЛА РЭБ 1 или их возвращении на исходную позицию. Управление БПЛА РЭБ 1 осуществляют по каналам связи через блоки 2.2 и 1.8.
В случае принятия решения о подготовке операции подавления (заданные ИРИ в районе барражирования обнаружены) блоком 2.7 формируются команды управления БПЛА РЭБ 11…1M на сброс ЗПП с литерами, соответствующими полосе радиоподавления Δƒп. Данные команды, формируемые блоком 2.7, передаются с использованием блоков 2.3, 2.10. В блоке 1.13 принятая команда дешифруется, определяются ЗПП 3 необходимые для сброса и выполняется их сброс. После выполнения этой операции БПЛА РЭБ 1 готовы к возвращению в исходный район за пополнением новых комплектов ЗПП. При принятии решения о дополнительной установке ЗПП 3 БПЛА РЭБ 1 возвращают на исходную позицию под управлением оператора с использованием блоков 2.1 и 2.6 по каналам управления 2.2 и 1.8. Пополнив запасы ЗПП 3 необходимых литеров частот и горючим (при необходимости) БПЛА РЭБ 11…1M по команде ПДУ 2 взлетают и направляются в заданный район. Данная операция продолжается до тех пор, пока не будет доставлено необходимое количество ЗПП 31…3N.
Сбрасываемые с М БПЛА РЭБ 11…1М ЗПП 31…3N планируют благодаря приданию их конструкции специальной формы, что позволяет снизить ударный эффект от соприкосновения с землей. После приземления каждый ЗПП определяет свое местоположение с помощью блока навигации 3.4 (см. фиг. 4). Результаты измерений поступают на блок управления ЗПП 3.2, где последние закрывают (шифруют) и далее поступают на вход приемопередающего модуля 3.1. Далее они излучаются в направлении БПЛА РЭБ (используется антенна с диаграммой направленности, направленной вверх). На БПЛА РЭБ 1 в блоке 1.12 данное сообщение ретранслируется в направлении ПДУ 2 (блок 2.5). Сообщения от всех N ЗПП поступают на вход второго блока управления 2.7 и далее в блок 2.4. С помощью блоков 2.4 и 2.7 принятая информация анализируется. На ее основе уточняют районы барражирования всех МБПЛА РЭБ 11…1М. Данное решение доводится до всех БПЛА РЭБ по каналу связи через блоки 2.2 и 1.8.
Принятое оператором решение на подавление в виде команд блока 2.7 поступает на М БПЛА РЭБ, находящихся в воздухе, по каналам связи через блоки 2.3 и 1.10 и далее на передатчики помех 1.11. Последние приступают к формированию помехового сигнала в полосе Δƒп. Задание на подавление для каждого БПЛА РЭБ может быть индивидуальным в зависимости от оперативной обстановки, местонахождения беспилотника в текущий момент времени, расположения ЗПП на местности, количества и номиналов их литеров. Управление ЗПП 3 осуществляют по каналам связи через блоки 2.5, 1.12 (выполняющий функцию ретрансляции) и блок 3.1. Принятая в ЗПП команда дешифруется в блоке 3.2 и передатчик помех 3.3 переходит в режим излучения помехового сигнала. В этом режиме ЗПП 3 может находиться до истечения энергетического ресурса или по команде ПДУ 2 об окончании подавления.
После прохождения команды от ПДУ 2 о прекращении блокирования каналов связи или полной выработке энергетического ресурса с помощью блоков 1.3 БПЛА РЭБ, находящихся в воздухе, а также блоков 2.4 и 2.7 выполняют анализ радиоэлектронной обстановки (РЭО) на предмет определения эффективности применения средств РЭБ. В случае принятия решения о неполном выполнении поставленной задачи начинают новый этап доставки ЗПП в район по выше описанному алгоритму.
Реализация всех элементов беспилотного робототехнического комплекса радиоэлектронной борьбы известная и трудностей не вызывает. Блоки 1.1, 1.2, 1.4-1.10, 2.1-2.3, 2.6 реализуются аналогично соответствующим блокам прототипа. Кроме того, они могут быть реализованы в соответствии с Пат. РФ №2550811, опубл. 20.05.2015 г., МПК G01S 13/46.
Радиоприемное устройство 1.3 предназначено для одновременного приема сигналов в широкой полосе частот, например 30…108 МГц, преобразования их на промежуточную частоту, например, 90 МГц и выполнения аналого-цифрового преобразования. Его реализация известна и трудностей не вызывает (см. Фомин Н.Н., Буга Н.Н. и др. Радиоприемные устройства: Учебник для вузов. - 3-е изд. стереотип. - М.: Горячая линия. - Телеком, 2007. - С. 520; Головин О.В. Радиоприемные устройства. - М.: Горячая линия - Телеком, 2004 г.).
Передатчики помех 1.11 и 3.3 могут быть реализованы с помощью последовательно подключенных синтезатора частоты компании MIM-CIRCUITS (см. Ю. Никитин. Генераторы, управляемые напряжением компании MIM-CIRCUITS для радиочастотных синтезаторов // Компоненты и технологии. №3, 2003 г.) и усилителя мощности этой же фирмы ZHL. Достаточная выходная мощность передатчиков помех, по мнению зарубежных специалистов, для БПЛА РЭБ и ЗПП в УКВ диапазоне составляет 5 Вт и 1 Вт соответственно.
Приемопередающий модуль 1.12 исполняют аналогично модулю 1.8. Шестой приемопередающий модуль 2.5 выполняют М-канальным аналогично модулю 2.3.
Второе устройство обработки и отображения информации содержит М трактов обработки и предназначено для анализа радиоэлектронной обстановки в заданном районе. Представляет из себя последовательно подключенные М-канальный приемный модуль, М-канальный блок частотно-временного анализа и блок индикации. Исходные данные о представляющем интерес частотном диапазоне ΔF выдает второй блок управления 2.7. Значение ΔF по каналам связи (блоки 2.3 и 1.10) поступает на управляющие входы радиоприемных устройств 1.3 всех БПЛА РЭБ. Последние в соответствии с полученной командой перестраиваются и осуществляют прием сигналов в заданной полосе частот, преобразуют, оцифровывают принятые излучения и по каналам связи (блоки 1.10 и 2.3) передают их на информационные входы соответствующих трактов обработки m, m-1, 2, … М устройства 2.4. В каждом из М трактов блока 2.4 выполняют преобразование принятых блоком 1.3 сигналов к виду, необходимому для выполнения частотно-временного анализа и последующей индикации результатов на экране. Полученные результаты являются исходными данными для принятия решения оператором пункта 2 о порядке использования средств РЭБ. Все элементы блока 2.4 широко освещены в литературе, а их реализация трудностей не вызывает (см. Коротков А.В. Частотно-временной анализ малозаметных радиолокационных станций. Диссертация канд. техн. наук. - СПб: ЛЭТИ им. В.И. Ульянова, 2015 г.)
Второй блок управления 2.7 предназначен для задания полосы формирования помех Δƒп группам ЗПП 3 и БПЛА РЭБ 1 или выдавать адресные индивидуальные задания средствам РЭБ. В блоке 2.7 собирается информация о текущем местоположении ЗПП 3 и БПЛА РЭБ 1, которая высвечивается на цифровой карте местности. Это позволяет оперативно управлять средствами РЭБ комплекса, уточнять районы барражирования БПЛА РЭБ и выброски 31111, необходимое количество 31111, осуществлять управление режимами РЭБ. Может быть реализован на ноутбуке в совокупности со специальным программным обеспечением, алгоритм работы которого соответствует фиг. 3.
Блок управления 3.2 предназначен для преобразования команд управления ПДУ 2 к виду, необходимому для нормальной работы передатчика помех 3.3, а также для закрытия информации о координатах ЗПП, полученных с блоков 3.4. Представляет из себя совокупность дешифратора и шифратора. Может быть реализован с помощью программируемых постоянных запоминающих устройств, например микросхем серии К 541 (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Гордонов, Н.В. Бева, В.В. Цыркин и др.; Под ред. А.Ю. Гордонова. - М.: Радио и связь, 1990. - 288 с.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| СПОСОБ РАДИОПОДАВЛЕНИЯ КАНАЛОВ СВЯЗИ СРЕДСТВАМИ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ С ИСПОЛЬЗОВАНИЕМ ЕН-АНТЕНН | 2022 |
|
RU2801842C1 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации | 2024 |
|
RU2825033C1 |
| Модуль управления параметрами помехового сигнала | 2025 |
|
RU2840341C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СИСТЕМА РАДИОПОДАВЛЕНИЯ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ ГНСС ПРОТИВНИКА, СОВМЕСТИМАЯ С ОТЕЧЕСТВЕННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЕЙ ГНСС | 2013 |
|
RU2539563C1 |
Техническое решение относятся к робототехническим комплексам радиоэлектронной борьбы (РЭБ) для дистанционной работы в заданном районе. В способе совместно с беспилотными летательными аппаратами (БПЛА) РЭБ используют забрасываемые передатчики помех (ЗПП). Доставку ЗПП в район их применения осуществляют с помощью М БПЛА РЭБ. Управление перемещением и оперативное управление постановкой помех БПЛА РЭБ выполняет пункт дистанционного управления (ПДУ) по беспроводным каналам связи. Управление работой ЗПП реализовано опосредовано через ретрансляторы, размещенные на борту БПЛА РЭБ. Дополнительно вводится комплект из ЗПП, на борту каждого из БПЛА РЭБ устанавливают ретранслятор и блок сброса ЗПП. Достигается повышение эффективности подавления радиосвязи в заданном районе. 2 н. и 1 з.п. ф-лы, 4 ил.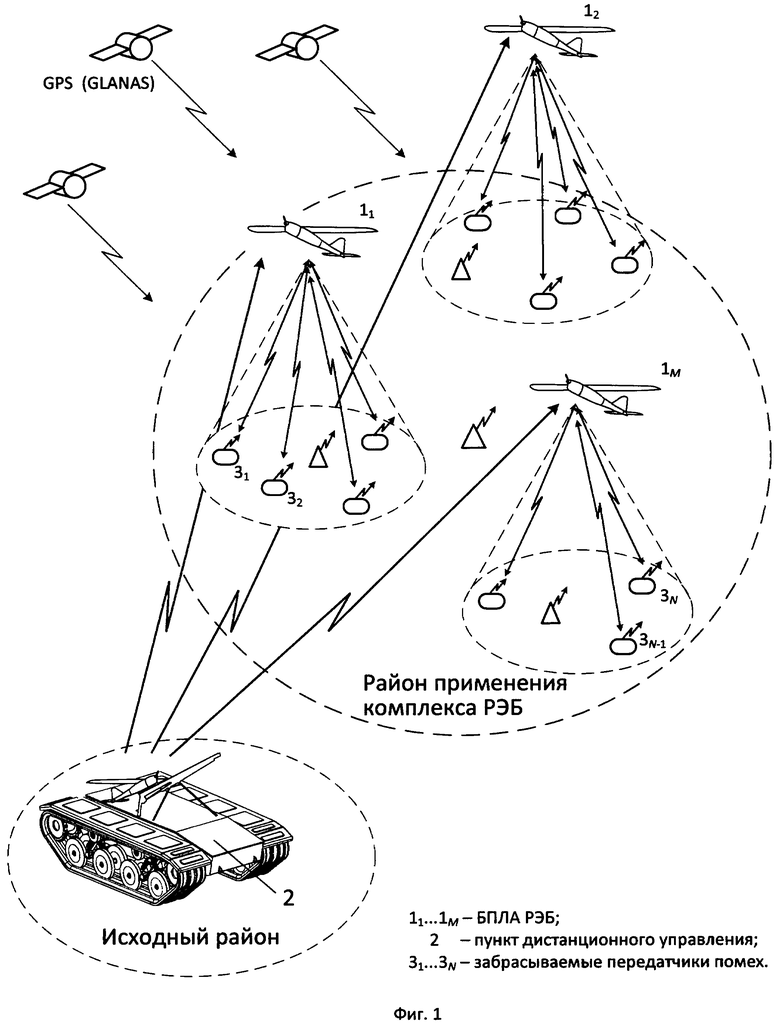
1. Способ доставки постановщиков помех, заключающийся в том, что для их доставки используют управляемый пунктом дистанционного управления (ПДУ) по беспроводному каналу носитель на беспилотном летательном аппарате (БПЛА), отличающийся тем, что дополнительно используют многочисленные забрасываемые передатчики помех (ЗПП), многократную доставку которых в заданный район осуществляют на БПЛА, а управление ЗПП осуществляют с ПДУ опосредовано по беспроводному каналу связи через ретранслятор, устанавливаемый на борту БПЛА.
2. Беспилотный робототехнический комплекс радиоэлектронной борьбы (РЭБ), содержащий транспортно-пусковую установку высокой проходимости, пункт дистанционного управления (ПДУ) и, по крайней мере, три одновременно применяемых в качестве воздушных роботов беспилотных летательных аппарата (БПЛА) РЭБ, причем каждый БПЛА РЭБ выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемопередающего модуля, последовательно соединенные радиоприемное устройство, запоминающее устройство и группа информационных входов второго приемопередающего модуля, блок навигации БПЛА РЭБ, группа информационных выходов которого соединена со второй группой информационных входов запоминающего устройства, и передатчик радиопомех, группа входов управления которого соединена с группой информационных выходов второго приемопередающего модуля, а пункт дистанционного управления выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой М БПЛА РЭБ, третий приемопередающий модуль и первое устройство обработки и отображения информации, последовательно соединенные четвертый приемопередающий модуль, второй блок управления, предназначенный для анализа радиоэлектронной обстановки и формирования команд на радиоподавление, и второе устройство обработки и отображения информации, вторая группа информационных входов которого объединена с группой информационных входов первого блока управления и первой группой входов второго блока управления, вторая группа выходов которого соединена с группой информационных входов четвертого приемопередающего модуля, отличающееся тем, что дополнительно введено N забрасываемых передатчиков помех (ЗПП), в пункт дистанционного управления введен шестой приемопередающий модуль, группа информационных входов которого соединена с третьей группой выходов второго блока управления, а группа информационных выходов соединена со второй группой входов второго блока управления, в каждый БПЛА РЭБ дополнительно введен пятый приемопередающий модуль, предназначенный для ретрансляции сигналов управления ЗПП, формируемый ПДУ и приема сообщений о их координатах, и устройство сброса ЗПП, группа входов управления которого объединена с группой входов управления передатчика помех и радиоприемного устройства.
3. Устройство по п. 2, отличающееся тем, что каждый забрасываемый передатчик помех (ЗПП) содержит последовательно соединенные приемопередающий модуль, блок управления и передатчик помех заданного диапазона частот, блок навигации, группа информационных выходов которого соединена со второй группой входов блока управления, предназначенного для преобразования команд управления пункта дистанционного управления к виду, необходимому для нормальной работы передатчика помех и закрытия информации о местоположении ЗПП, вторая группа выходов которого соединена с группой информационных входов приемопередатчика.
| Люминесцирующий экран белого свечения | 1939 |
|
SU71321A3 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| KR 20150115364 A, 14.10.2015 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

