Изобретение относится к радиотехническим средствам определения местоположения работающих радиолокационных станций (РЛС), имеющих сканирующую направленную антенну. Для определения местоположения РЛС используют ее прямые сигналы и сигналы, отраженные от окружающих объектов.
Известен измеритель дальности до работающего радиопередатчика, в частности, работающей РЛС, содержащий четыре приемных антенны, приемное устройство, имеющее пять входов, из которых первые четыре соединены с выходами четырех приемных антенн и шесть выходов, вычислитель пеленга, имеющий шесть входов, из которых первые четыре соединены с первыми четырьмя выходами приемного устройства, и один выход, устройство идентификации источников излучений, содержащее два входа, которые соединены с пятым и шестым выходом приемного устройства, и два выхода, первый из которых соединен с пятым входом вычислителя пеленга, устройство подстройки частоты, вход которого соединен с пятым выходом приемного устройства, автокоррелятор, вход которого соединен с пятым выходом приемного устройства, а его выход - с шестым входом вычислителя пеленга, и компьютер, содержащий четыре входа, первый из которых соединен с выходом измерителя пеленга, второй - с выходом автокоррелятора, третий - с первым выходом устройства идентификации источников излучений и четвертый - с внешним устройством, измеряющим угол и расстояние до отражающего объекта [1].
Недостатком такого устройства является его неспособность самостоятельно определять направление и расстояние до отражающего объекта без применения дополнительных внешних устройств (при этом для определения местоположения радиопередатчика используется только один отражающий объект).
Наиболее близким к заявляемому объекту является устройство для определения местоположения работающей РЛС, содержащее каскадно соединенные антенну, приемное устройство, первый управляемый аналоговый вентиль, второй управляемый аналоговый вентиль, аналого-цифровой преобразователь, устройство памяти и компьютер, детектор максимума луча антенны РЛС, вход которого соединен с выходом приемного устройства, а выход - с управляемым входом первого управляемого аналогового вентиля, каскадно соединенные устройство выделения прямых сигналов РЛС, вход которого соединен с выходом первого управляемого логического вентиля, и счетчик временных интервалов, выход которого соединен с управляемым входом второго управляемого логического вентиля [2].
Недостатком устройства-прототипа является то, что оно может определять местоположение только такой работающей РЛС, у которой антенна вращается с постоянной угловой скоростью, а излучаемые ею радиоимпульсы имеют одинаковую длительность и постоянную частоту повторения.
Задача, на достижение которой направлено предлагаемое решение, - расширение функциональных возможностей устройства-прототипа (возможностей определения местоположения работающих РЛС, имеющих произвольный закон сканирования луча в пространстве и произвольный характер излучаемых сигналов).
Решение поставленной задачи достигается тем, что в устройство для определения местоположения работающей радиолокационной станции, содержащее антенну и приемное устройство, вход которого соединен с выходом антенны, аналого-цифровой преобразователь, устройство обнаружения сигналов, устройство выделения прямых сигналов РЛС, счетчик временных интервалов и устройство памяти, каждое из которых имеет один вход и один выход, и компьютер, вход которого соединен с выходом устройства памяти, дополнительно введены вторая антенна и второе приемное устройство, вход которого соединен с выходом второй антенны, второй аналого-цифровой преобразователь, содержащий два входа, первый из которых соединен с выходом второго приемного устройства, и один выход, генератор тактовых импульсов, имеющий один выход, управляемый логический вентиль, имеющий два входа, первый из которых соединен с выходом счетчика временных интервалов, второй - с выходом устройства обнаружения сигналов, и один выход, моноимпульсный вычислитель пеленга, имеющий четыре входа, первый из которых соединен с выходом устройства обнаружения сигналов, второй и третий - с выходами первого и второго аналого-цифровых преобразователей, четвертый - с выходом генератора тактовых импульсов, и один выход, в первом аналого-цифровом преобразователе дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом первого приемного устройства, в устройстве обнаружения сигналов дополнительно образованы второй и третий входы, соединенные соответственно с выходом второго аналого-цифрового преобразователя и выходом генератора тактовых импульсов, в устройстве памяти дополнительно образованы второй, третий и четвертый входы, соединенные соответственно с выходом устройства выделения прямых сигналов РЛС, выходом моноимпульсного вычислителя пеленга и выходом генератора тактовых импульсов, в устройстве выделения прямых сигналов дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, в счетчике временных интервалов дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом устройства обнаружения сигналов, второй вход второго аналого-цифрового преобразователя соединен с выходом генератора тактовых импульсов, первый вход устройства обнаружения сигналов - с выходом первого аналого-цифрового преобразователя, первый вход устройства выделения прямых сигналов РЛС - с выходом моноимпульсного вычислителя пеленга, и первый вход устройства памяти - с выходом управляемого логического вентиля.
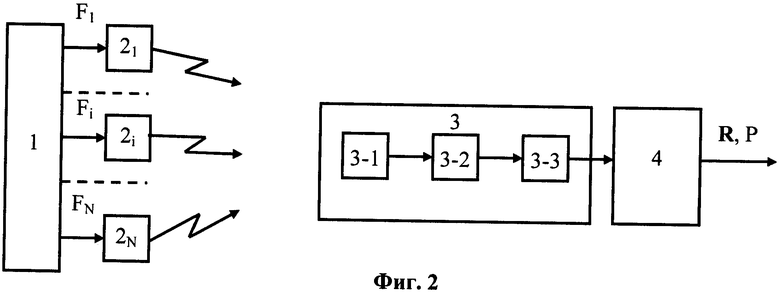
На фиг.1 изображена функциональная схема предлагаемого устройства для определения местоположения работающей РЛС, на которой обозначено:
1 - первая антенна;
2 - первое приемное устройство;
3 - первый аналого-цифровой преобразователь (АЦП);
4 - вторая антенна;
5 - второе приемное устройство;
6 - второй АЦП;
7 - устройство обнаружения сигналов;
8 - генератор тактовых импульсов;
9 - счетчик временных интервалов;
10 - управляемый логический вентиль;
11 - моноимпульсный вычислитель пеленга;
12 - устройство выделения прямых сигналов РЛС;
13 - устройство памяти;
14 - компьютер.
Предлагаемое устройство содержит два идентичных приемных канала, первый из которых состоит из каскадно соединенных первой антенны 1, первого приемного устройства 2 и первого АЦП 3, а второй - из каскадно соединенных второй антенны 4, второго приемного устройства 5 и второго АЦП 6. Приемные антенны 1 и 4 выполнены одинаковыми и разнесены в пространстве. Выполнены одинаковыми и первое 2 и второе 5 приемные устройства и первый 3 и второй 6 АЦП. Сигнал от работающей РЛС принимается антеннами 1 и 4. Сигналы с выходов антенн 1 и 4 поступают на входы приемных устройств 2 и 5. С выходов приемных устройств сигналы поступают на входы первого 3 и второго 6 АЦП.
Обработка сигналов после первого 3 и второго 6 АЦП осуществляется в цифровой форме. К цифровым блокам относятся: первый 3 и второй 6 АЦП, устройство обнаружения сигналов 7, счетчик временных интервалов 9, моноимпульсный вычислитель пеленга 11, устройство выделения прямых сигналов РЛС 12 и устройство памяти 14. Работа цифровых блоков синхронизируется генератором тактовых импульсов 8.
Цифровые блоки обмениваются цифровыми сигналами в двоичной форме, для передачи которых требуется набор проводников, объединенных в одну шину. Архитектура построения цифровых устройств может быть различной и содержать вспомогательные линии, по которым передаются сигналы, служащие для обеспечения их работы (это могут быть, например, сигналы разрешения, чтения/записи и другие). Так как на структуру устройства эти детали влияния не оказывают, на чертежах заявки на изобретение все соединения блоков выполнены одиночными линиями.
Сигналы с выходов АЦП поступают на первый и второй входы устройства обнаружения сигналов 7 и на второй и третий входы моноимпульсного вычислителя пеленга 11.
В устройстве 7 производится выбор входа, по которому будет производиться процедура обнаружения сигналов. Критерием при выборе входа может быть, например, максимум амплитуды сигнала. При обнаружении сигнала на выходе устройства 7 появляется сигнал, соответствующий уровню логической единицы.
Генератор тактовых импульсов 8 обеспечивает синхронизацию операций, происходящих во всех цифровых блоках устройства. Он формирует высокочастотный меандр, который поступает на все цифровые блоки и обеспечивает работу входящих в них цифровых логических устройств.
При обнаружении сигналов устройством обнаружения сигналов 7 сигнал с его выхода поступает на первый вход счетчика временных интервалов 9, на второй (управляющий) вход управляемого логического вентиля 10 и на первый вход моноимпульсного вычислителя пеленга 11. Счетчик временных интервалов 9 производит подсчет числа импульсов генератора тактовых импульсов 8 от момента обнаружения прямого сигнала РЛС до момента обнаружения отраженного сигнала (следующего за прямым).
Управляемый логический вентиль 10 представляет собой двоичное многоразрядное логическое «И». На его входы поступают два сигнала - один от счетчика временных интервалов 9, второй от устройства обнаружения сигналов 7. При поступлении на второй вход управляемого логического вентиля 10 сигнала от устройства обнаружения сигналов 7, на его выходе появляется двоичное число, равное количеству тактовых импульсов, подсчитанных счетчиком временных интервалов 9.
При обнаружении прямого или отраженного сигналов на первый вход устройства памяти 13 с выхода управляемого логического вентиля 10 поступает сигнал, несущий информацию о задержке между прямым и отраженным сигналами. Величина задержки между сигналами вычисляется в компьютере 14 как разность между временами обнаружения прямого и отраженного сигналов.
Во время поступления сигнала с выхода устройства обнаружения сигналов 7 на первый вход моноимпульсного вычислителя пеленга 11 последний рассчитывает пеленг на источник радиосигнала по сигналам, снимаемым с выходов первого 3 и второго 6 АЦП.
Моноимпульсный вычислитель пеленга 11 представляет собой набор цифровых логических модулей, осуществляющих измерение разностей фаз и/или амплитуд сигналов, поступающих на его вход и на основе этих измерений производящих расчет пеленга на РЛС.
Данные о пеленге поступают на третий вход устройства памяти 13 и на первый вход устройства выделения прямых сигналов РЛС 12, в котором осуществляется как селекция прямого сигнала, так и селекция сигналов, поступающих от нескольких источников излучений (отражающих объектов).
По информации о вычисленном пеленге устройство выделения прямых сигналов РЛС 12 определяет, относится ли принятый сигнал к прямому или к отраженному сигналу РЛС. Принцип работы этого устройства основан на том, что прямой сигнал РЛС поступает на вход приемника первым и в каждой принимаемой комбинации прямого и отраженных сигналов РЛС, пеленг по сигналу РЛС остается постоянным, а по отраженным сигналам он меняется.
Данные из устройства памяти 13 поступают в компьютер 14, где происходит их обработка и вычисление координат источников радиоизлучений.
Поясним возможную реализацию устройства памяти 13. Как и остальные цифровые блоки, изображенные на фиг.1, оно состоит из набора цифровых логических модулей (в виде набора микросхем). Архитектура построения такого устройства может быть различной. Возможен вариант исполнения, например, когда в устройстве памяти имеется несколько модулей памяти, и информация от внешних блоков записывается в свой модуль. Все модули памяти подключены к управляющему модулю, через который данные передаются в компьютер.
Компьютер 14 представляет собой ЭВМ, содержащую процессор, устройство памяти и набор вспомогательных устройств, позволяющих производить математические операции с поступающими данными и взаимодействовать с пользователем.
Передача данных из устройства памяти 13 в компьютер 14 осуществляется по одной шине (она может поддерживать как параллельный, так и последовательный формат передачи данных). Данные передаются в запросном режиме и однозначно интерпретируются в компьютере.
Для лучшего понимания особенностей работы предлагаемого устройства ниже описаны известные способы определения местоположения источника радиоизлучения пассивными средствами и способ, лежащий в основе предлагаемого устройства.
Классическими способами определения местоположения источника радиоизлучения пассивными средствами являются пеленгационный (триангуляционный) и разностно-дальномерный (гиперболический) [3]. Пеленгационный способ предполагает определение направлений (пеленгов) на источник излучения из двух точек с известными координатами и последующим решением на плане местности треугольника, в вершинах которого находятся устройства для определения направления и источник радиосигналов. Разностно-дальномерный способ основан на использовании трех приемных устройств, координаты которых известны, и измерения разностей времени прихода сигнала, излученного разведуемым передатчиком и принятого тремя разнесенными в пространстве приемными устройствами. Местоположение источника сигнала определяется как точка пересечения на местности двух линий положения источника излучения - гипербол, проведенных в соответствии с измеренными разностями времени прихода сигнала в приемные пункты.
Недостатком этих способов измерения местоположения источника радиоизлучения является необходимость иметь линию оперативной связи между пунктами приема, по которой данные о пеленге или времени прихода сигналов должны передаваться из одного приемного пункта в другой для последующего вычисления координат источника радиосигнала. Наличие линий радиосвязи демаскирует пассивную аппаратуру разведки, а проводная связь возможна только между стационарными приемными пунктами.
Альтернативой определению координат источника радиоизлучения с помощью приема сигнала в разнесенных точках является использование одного приемного устройства, в котором принимается один прямой сигнал передатчика, пришедший в точку приема по кратчайшему пути, и группа сопровождающих его запаздывающих сигналов, переизлученных от каких-либо объектов или подстилающей поверхности, находящихся в зоне действия РЛС.
Устройство для измерения дальности до передатчика [1] содержит направленный приемник Rx, который может принимать сигналы прямо от передатчика Tx, и сигналы, отраженные от объекта Ax (фиг.2). Зная расстояние r от отражающего объекта до приемника Rx и рассчитывая разность углов, под которыми из точки расположения приемника видны передатчик и отражающий объект, а также измеряя разность времени τ прихода в точку приема прямого и отраженного сигналов, расстояние R от приемника до передатчика можно вычислить по формуле:

где δ=с·τ;
с - скорость распространения радиоволн;
θ - угол между направлением на передатчик и отражающий объект из точки приема.
Формула (1) выводится из геометрических соотношений, следующих из фиг.2.
Измеренное приемным устройством направление на источник радиосигнала и рассчитанное расстояние до него определяет местоположение источника радиосигнала на поверхности земли или моря. Направление на отражающий объект и расстояние до него в [1] определяют специальным измерителем, не входящим в состав устройства-аналога.
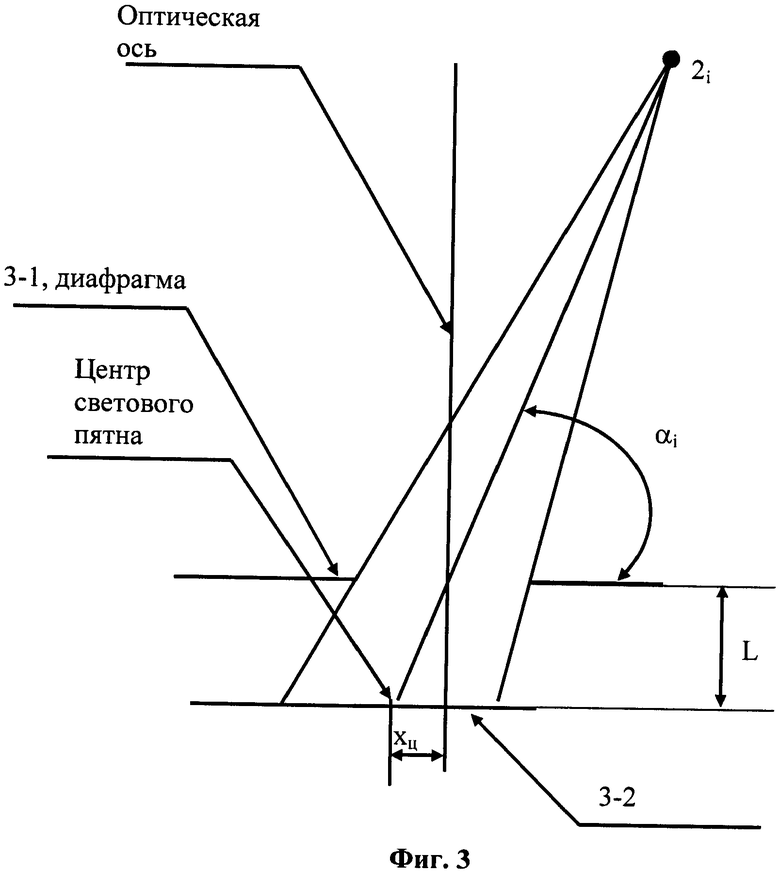
Известен также способ определения местоположения источника импульсного радиоизлучения со сканирующей направленной антенной из одной приемной точки, который используется в устройстве-прототипе [2]. Идея способа поясняется фиг.3, на которой обозначены: Tx - передатчик с направленной антенной, осуществляющий круговое сканирование; О - объект, отражающий сигналы передатчика в сторону приемника, Rx - приемное устройство. Считается, что частота повторения импульсов, излучаемых передатчиком, постоянна. Примером такого передатчика может служить радиолокационная станция, работающая в режиме кругового обзора. Приемное устройство способно разделять прямой сигнал передатчика и сигнал, переотраженный объектом О, и измерять временное запаздывание τ переотраженного сигнала по отношению к прямому. Подсчитывая в точке приема количество импульсов, принятых между моментами приема прямого сигнала по главному лепестку диаграммы направленности антенны за один период ее вращения (это количество импульсов обозначим N), и количество импульсов между моментами приема прямого и отраженного сигналов (обозначим это количество импульсов как n), можно определить угол поворота θ антенны РЛС от направления на приемник до направления на отражающий объект. Угол поворота антенны РЛС определяется выражением: θ=360°·n/N.
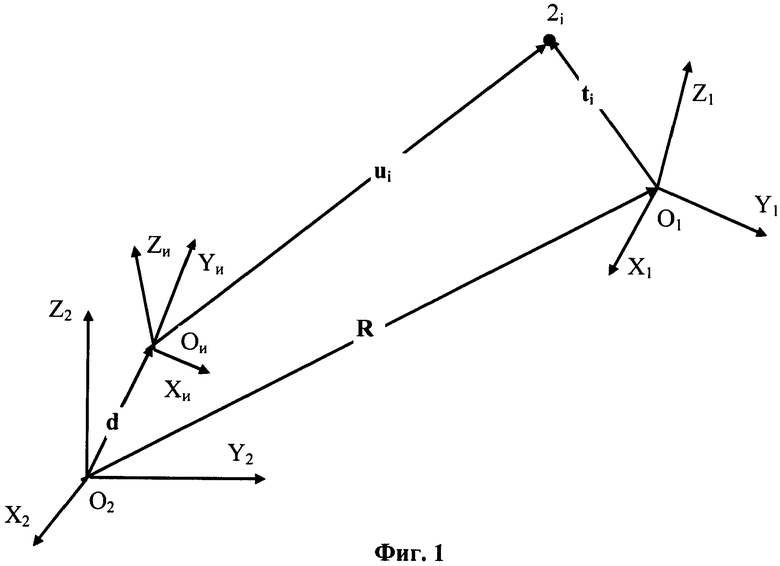
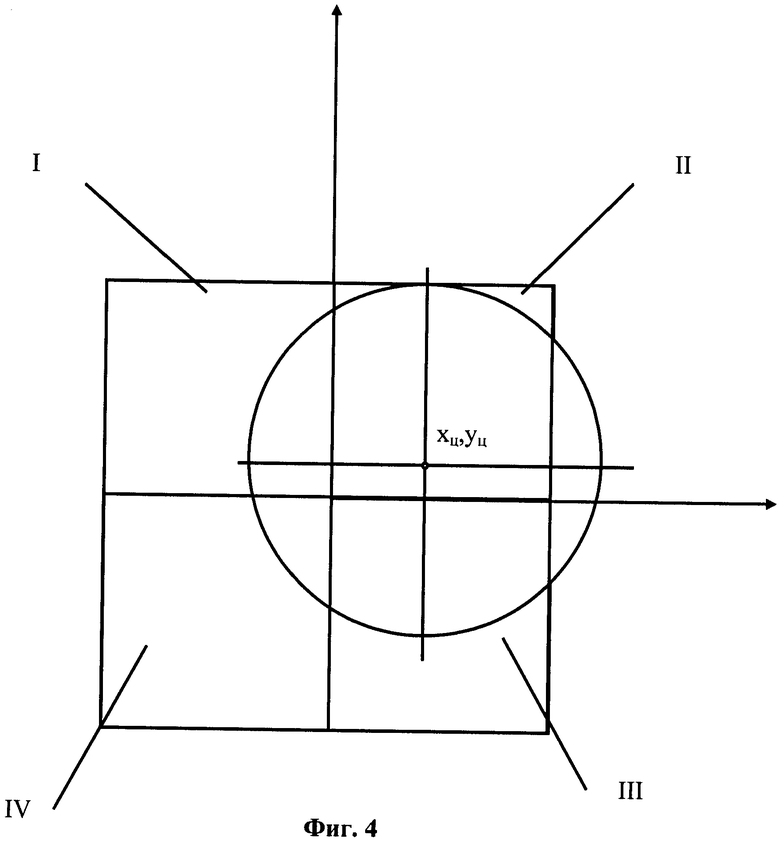
На фиг.4 схематически показано положение передатчика Tx (точка Е) приемника Rx (точка О), отражающего объекта А (точка х, y), а также угол θ поворота антенны передатчика между моментами приема прямого и отраженного сигналов в прямоугольной системе координат. Положение приемника на фиг.4 совпадает с началом координат, передатчик расположен на вертикальной оси y, а расстояние между приемником и передатчиком равно R.
Любая отражающая точка А лежит на эллипсе, являющимся геометрическим местом точек, сумма расстояний от которых до точек Е и О равна R+δ, где δ=сτ; с - скорость распространения радиоволн; τ - разность времени прихода в точку приема прямого и переотраженного сигналов. Соотношения между R, δ, х и y определяется уравнением:

Из фиг.4 следует:

Из выражений (2) и (3) можно найти координаты отражающего объекта через расстояние между приемником и передатчиком R, угол поворота θ антенны передатчика от направления на приемник до направления на отражающий объект, а также разность длин путей δ прямого и переотраженного сигналов:


Местность в районе приемного пункта «накрывают» координатной сеткой. Оценивают видимость каждого узла сетки на местности со стороны передатчика и приемника, и данные об отражающих объектах заносят в память компьютера. Компьютер сравнивает координаты х и y точки отражения, вычисленные по измеренной задержке τ, величине угла θ и предполагаемой дальности R с координатами реального отражающего объекта, заложенными в память компьютера. Подбирается такая величина R, чтобы рассчитанные координаты совпадали с координатами, заложенными в память компьютера. Подобным образом каждой отражающей точке, углу θ и временному запаздыванию τ ставится в соответствие местоположение источника радиосигнала на координатной сетке. Поскольку точек, от которых происходят отражения радиосигнала на местности, обычно несколько, местоположение передатчика в координатной сетке оценивается вероятностной величиной. Наиболее вероятная точка принимается за положение передатчика.
Особенностью устройства-прототипа, описанного в [2], является то, что для определения координат передатчика используется не один отражающий объект, а их множество. Отражающими объектами могут быть неровности рельефа, имеющие прямую радиовидимость как с приемной, так и с передающей позиции.
Недостатком данного способа является то, что он может быть осуществлен только для РЛС, имеющих постоянную угловую частоту вращения антенны передатчика и постоянный период следования излучаемых радиоимпульсов. Однако современные радиолокационные станции могут работать со сканированием луча по случайному закону и излучать радиоимпульсы с изменяющейся частотой повторения.
В способе, лежащем в основе предлагаемого устройства, источником радиоизлучения может быть работающая импульсная радиолокационная станция с произвольным законом сканирования диаграммы направленности антенны. Предполагается, что приемные устройства в месте наблюдения имеют достаточную чувствительность и что они способны принимать прямые сигналы передатчика по боковому излучению его антенны. Ставя в соответствие измеренным разностям углов и моментам прихода сигналов в приемный пункт координаты реально существующих отражающих объектов, вычисляется местоположение передатчика.
На фиг.4 в точке Е расположен импульсный передатчик, в точке О - приемный пункт, в точке А(х, y) - единственный отражающий объект. Импульсы, излученные передатчиком, приходят в точку приема О по прямому пути ЕО и по пути ЕАО, отразившись от объекта А(х, y). Приемный пункт имеет слабонаправленные антенны и способен принимать как прямые, так и отраженные от объектов сигналы и измерять углы прихода прямого и отраженного сигналов и задержку τ между ними. По задержке τ определяется разность длин путей прямого и отраженного сигнала δ=cτ=EA+AO-ЕО.
Из последнего соотношения следует, что EA+AO=R+δ. Это означает, что точка А(х, y) лежит на эллипсе, в фокусах которого расположены передающее и приемное устройства, и что сумма расстояний от любой точки эллипса до его фокусов равна R+δ. Уравнение этого эллипса описывается выражением (2).
Из фиг.4 также следует, что для любой точки, находящейся на эллипсе, выполняется соотношение:

Подставляя формулу (6) в уравнение эллипса (2), находим координаты отражающего объекта А(х, y):


Дальность до источника радиоизлучения в способе, лежащем в основе предлагаемого устройства, оценивается путем сравнения действительных координат xni, yni, занесенных в память компьютера, с рассчитанными по формулам (7 и 8), в которые были подставлены измеренные значения угла α, пространственная разность путей распространения сигналов δ и переменная величина R. За оценку дальности принимается такое значение R, при котором разность между рассчитанными и заложенными в память компьютера координатами минимальна. Вследствие неизбежности ошибок измерений полное совпадение рассчитанных координат и координат, занесенных в память компьютера, маловероятно, поэтому формула для оценки дальности до источника радиоизлучения при использовании одного переотражающего объекта может быть записана как:

где xi(R,α,δ) и yi(R,α,δ) - координаты i-ого отражающего объекта, рассчитанные по формулам (7) и (8).
Поскольку, как показывает практика, в зоне действия приемного пункта (пеленгатора) обычно имеется несколько отражающих объектов, которые могут быть использованы для определения дальности R, формула для оценки дальности R (9) в этом случае может быть записана в виде:

Дальность R, удовлетворяющая формулам (9) и (10), принимается за истинную. Из вышеприведенного следует что предлагаемое устройство в отличие от устройства-прототипа позволяет определять местоположение работающей РЛС, имеющей произвольный закон сканирования луча и произвольный характер излучаемых сигналов.
Источники информации
1. Пат. Великобритании №2094089А, кл. G01S 13/86, GB H 4D 300, 348, 349, 369, 399, 508, 512, 535, заявл. 02.03.1981, опубл. 08.09.1982.
2. Пат. США №4882590, кл. G01S 3/02, U.S.Cl. 342/453, заявл. 18.05.1988, опубл. 21.11.1989 - прототип.
3. Теоретические основы радиолокации / Под ред. В.Е.Дулевича. - М.: Сов. Радио, 1978. - 608 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
Изобретение предназначено для определения местоположения работающей радиолокационной станции (РЛС), имеющей сканирующую направленную антенну. Сущность изобретения состоит в том, что в известное устройство, содержащее антенну, приемное устройство, аналого-цифровой преобразователь (АЦП), устройство обнаружения сигналов (УОС), счетчик временных интервалов (СВИ), устройство памяти, устройство выделения прямых сигналов (УВПС), введены вторая антенна для определения пеленга на РЛС и отражающие объекты, второе приемное устройство, второй АЦП, моноимпульсный вычислитель пеленга (МВП), управляемый логический вентиль (УЛВ), генератор тактовых импульсов для синхронизации цифровых устройств и отсчета временных интервалов, компьютер. В память компьютера предварительно заносятся координаты отражающих объектов, находящихся в зоне действия предлагаемого устройства. После обнаружения прямого и следующих за ним отраженных сигналов запускаются МВП, СВИ и УЛВ. При наличии сигнала на выходе УОС данные о задержке обнаруженного сигнала и его пеленге поступают в устройство памяти совместно с выходным сигналом УВПС РЛС. Компьютер обрабатывает записанные в устройство памяти данные, выбирая наборы из прямого и отраженного сигналов и оценивая дальность до РЛС. За дальность до РЛС принимается значение дальности, при которой разность между рассчитанными и заложенными в память компьютера координатами имеет минимальное значение. Достигаемый технический результат - определение местоположения работающих РЛС, имеющих произвольный закон сканирования луча в пространстве и произвольный период повторения излучаемых сигналов. 1 з.п. ф-лы, 4 ил.
1. Устройство для определения местоположения работающей радиолокационной станции (РЛС), содержащее антенну и приемное устройство, вход которого соединен с выходом антенны, аналого-цифровой преобразователь, устройство обнаружения сигналов, устройство выделения прямых сигналов РЛС, счетчик временных интервалов и устройство памяти, каждое из которых имеет один вход и один выход, и компьютер, вход которого соединен с выходом устройства памяти, отличающееся тем, что в него дополнительно введены вторая антенна и второе приемное устройство, вход которого соединен с выходом второй антенны, второй аналого-цифровой преобразователь, содержащий два входа, первый из которых соединен с выходом второго приемного устройства, и один выход, генератор тактовых импульсов, имеющий один выход, управляемый логический вентиль, имеющий два входа, первый из которых соединен с выходом счетчика временных интервалов, второй - с выходом устройства обнаружения сигналов, и один выход, моноимпульсный вычислитель пеленга, имеющий четыре входа, первый из которых соединен с выходом устройства обнаружения сигналов, второй и третий - с выходами первого и второго аналого-цифровых преобразователей, четвертый - с выходом генератора тактовых импульсов, и один выход, в первом аналого-цифровом преобразователе дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом первого приемного устройства, в устройстве обнаружения сигналов дополнительно образованы второй и третий входы, соединенные соответственно с выходом второго аналого-цифрового преобразователя и выходом генератора тактовых импульсов, в устройстве памяти дополнительно образованы второй, третий и четвертый входы, соединенные соответственно с выходом устройства выделения прямых сигналов РЛС, выходом моноимпульсного вычислителя пеленга и выходом генератора тактовых импульсов, в устройстве выделения прямых сигналов РЛС дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, в счетчике временных интервалов дополнительно образован второй вход, соединенный с выходом генератора тактовых импульсов, а его первый вход соединен с выходом устройства обнаружения сигналов, второй вход второго аналого-цифрового преобразователя соединен с выходом генератора тактовых импульсов, первый вход устройства обнаружения сигналов - с выходом первого аналого-цифрового преобразователя, первый вход устройства выделения прямых сигналов РЛС - с выходом моноимпульсного вычислителя пеленга и первый вход устройства памяти - с выходом управляемого логического вентиля.
2. Устройство по п.1, отличающееся тем, что в его состав введены 1-12 дополнительных антенн, 1-12 дополнительных приемных устройств, входы которых соединены с выходами соответствующих 1-12 дополнительных антенн, 1-12 дополнительных аналого-цифровых преобразователей, имеющих два входа, первые из которых соединены с выходами соответствующих дополнительно введенных приемных устройств, а вторые - с выходом генератора тактовых импульсов, и в устройстве обнаружения сигналов и в моноимпульсном вычислителе пеленга образованы по 1-12 дополнительных входов, соединенных с выходами соответствующих дополнительно введенных аналого-цифровых преобразователей.
| US 4882590 A, 21.11.1989 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| ЕР 342529 В1, 10.01.1996 | |||
| US 5926135 А, 20.07.1999 | |||
| US 7019694 B2, 28.03.2006. | |||

