Изобретение относится к устройствам оптимизации использования воздушного или гидропотока при применении лопастных роторов и может быть использовано в авиационной технике, водной технике и ветроэнергетике.
Проблема лопастных роторов заключается в том, что направление вектора потока относительно лопасти зависит от скорости вращения самого ротора, а также величины и направления вектора скорости набегающего потока на ротор в целом. При этом создание лопастями аэро- гидродинамической силы в нужном направлении и с наибольшем коэффициентом полезного действия (КПД) возможно только при единственном направлении вектора потока относительно самой лопасти.
Направление и величину вектора потока вычисляют через треугольник скоростей. Треугольник скоростей образуется вектором скорости набегающего потока и касательной скоростью движения сечения лопасти на 0,7 ее радиуса от оси вращения. Он, главным образом, показывает направление потока относительно лопасти ротора. Вернее, относительно сечения лопасти на 0,7 ее радиуса от оси вращения (фиг. 1) - 0.7 радиуса лопасти - точка приложения равнодействующей аэродинамических сил со всей лопасти.
Чтобы создать для лопастного ротора оптимальные условия работы перед ним устанавливают направляющий аппарат. Это устройство, которое перенаправляет набегающий поток таким образом, чтобы он подходил к лопасти всегда под оптимальным для нее углом атаки и вне зависимости от скорости набегающего потока, а также скорости вращения ротора.
Известна схема и принцип действия газовой турбины, принятой за прототип и состоящей из центрального тела, соплового аппарата (направляющий аппарат) и рабочего колеса (лопастной ротор). («Теория реактивных двигателей». Авторы П.К. Казанджан, Л.П. Алексеев, и др. Военное издательство Министерства Обороны Союза ССР Москва - 1955 г. Страница 115 рисунок 77 и Страница 116 рисунок 78.).
Направляющий аппарат имеет следующие характерные проблемы:
- проблема дискретного преобразование потока, заключающаяся в том, что вектор потока приобретает нужное направление только в небольшой зоне за лопаткой. В промежутке между лопатками направляющего аппарата вектор потока может не только подойти к лопасти под неоптимальным углом атаки, но даже под отрицательным. Это будет создавать знакопеременные нагрузки на лопасть, способствующие ее износу и падению тяги в целом.
- проблема дополнительного сопротивления, вызванного потерями энергии на создание вихрей, заключающаяся в том, что резкое изменение направление потока лопаткой направляющего аппарата приводит к его сжатию и выдавливанию по пути наименьшего сопротивления.
Задачей изобретения является создание направляющего аппарата, подводящего поток к лопастям под наиболее оптимальным для них углом атаки.
Технический результат заключается в увеличения КПД лопастных роторов и снижении шума.
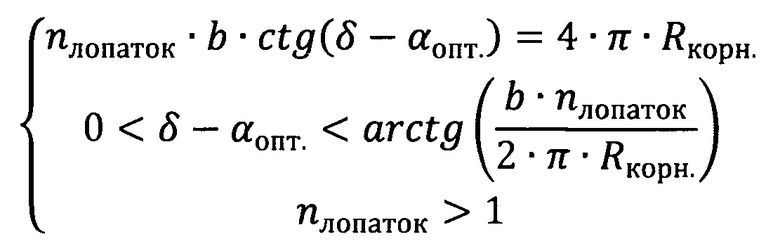
Решение задачи и технический результат достигаются тем, что в аппарате оптимизации потока перед лопастным ротором, содержащем центральное тело с установленными на нем одной или более направляющими лопатками, форма которых определена следующими закономерностями:



где:
b - хорда лопатки;
δ - угол заклинения лопасти;
αопт. - угол атаки, соответствующий наибольшему аэродинамическому качеству;
х - параметр функции
усредн.лин.профиля(х) - уравнение кривой, образующей лопатку;
nлопаток - количество лопаток;
Rкорн. - радиус корневого сечения лопасти;
Rконц. - радиус концевого сечения лопасти;
RЦ.Т.(х) - радиус центрального тела в конкретной точке.
Rлоп.(x) - радиус края лопатки в конкретной точке.
k1>1 - степень функции кривой, образующий лопатку
k2=0.75…1.25 - коэффициент, определяющий возможные отклонения радиуса лопатки центрального тела от корневого радиуса лопасти.
Изобретение поясняется следующими фигурами:
Фиг. 1 - изображен треугольник скоростей, образованный вектором скорости набегающего потока и касательной скоростью движения сечения лопасти на 0,7 ее радиуса от оси вращения.
Фиг. 2 - общий вид аппарата оптимизации потока.
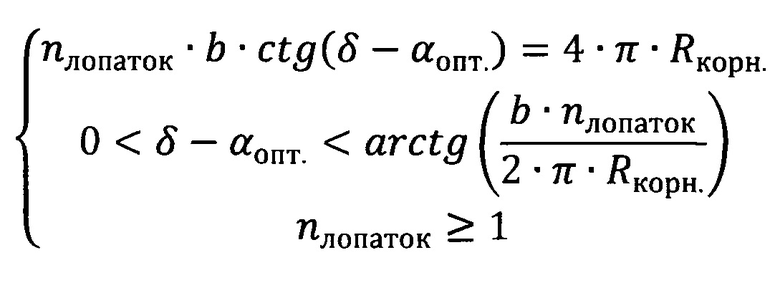
Фиг. 3 - геометрическое построение лопатки направляющего аппарата и ее расположение относительно лопасти ротора.
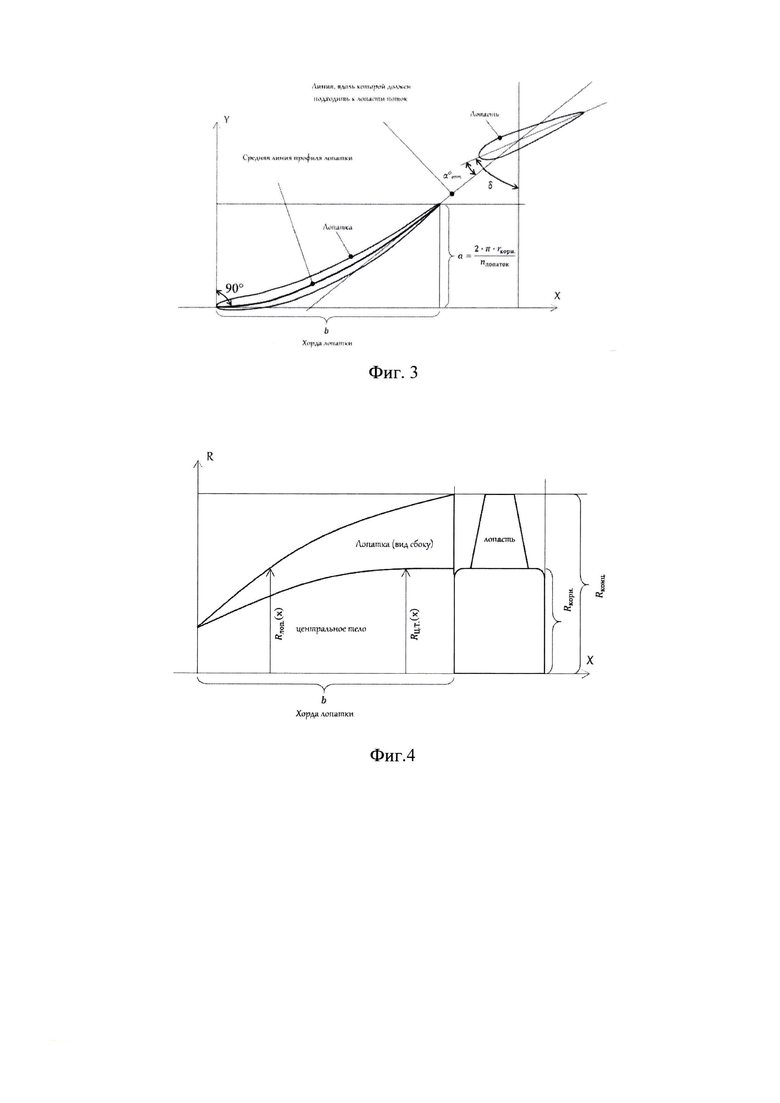
Фиг. 4 - геометрическое построение лопатки направляющего аппарата и ее расположение относительно лопасти ротора на виде сбоку.
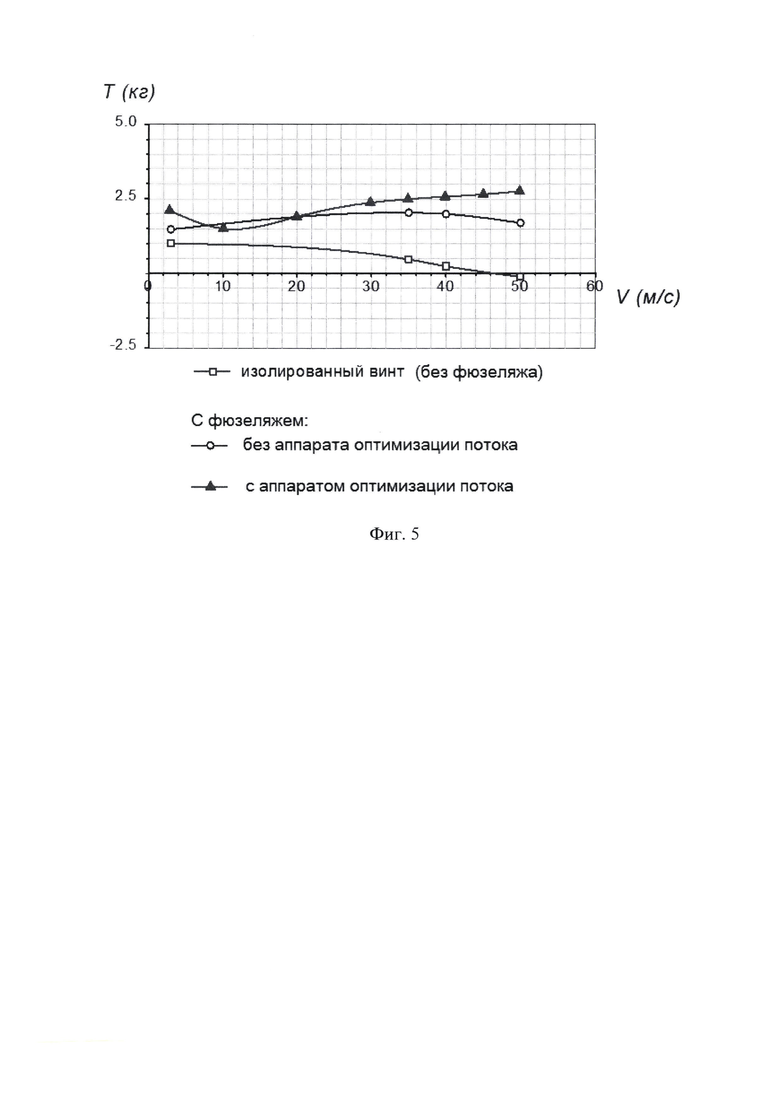
Фиг. 5 - полученная экспериментально зависимость тяги движителя от скорости набегающего потока с аппаратом оптимизации потока и без него (N=6000 об./мин).
Аппарат оптимизации потока конструктивно состоит (Фиг. 2) из центрального тела 1 с установленными на нем одной или более направляющими лопатками 2 с плавно возрастающим радиусом от радиуса центрального тела до радиуса законцовки лопасти. Аппарат оптимизации потока располагается перед лопастным ротором 3.
Центральное тело представляет собой основание для крепежа направляющих лопаток и, в частности, служит обтекателем валов и втулок лопастного ротора. Лопатки и центральное тело выполнены по интегральной схеме, т.е. поверхность лопаток плавно переходит в поверхность центрального тела.
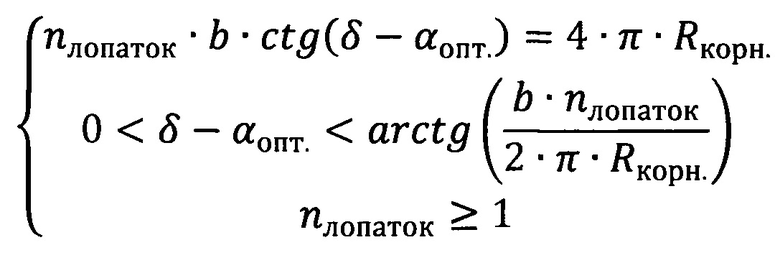
Направляющие лопатки представляют собой аэродинамические поверхности, число и форма которых подчиняется определенным закономерностям:
- уравнение кривой, образующей лопатку (Фиг. 3)

- уравнение взаимосвязи хорды лопатки (b), количества лопаток (nлопаток), корневого радиуса лопасти (rкорн) и угла заклинения лопасти (δ) (Фиг. 3)
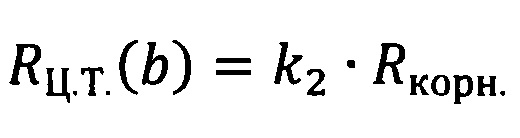
- уравнение изменения локального радиуса лопатки (Фиг. 4)


где:
b - хорда лопатки;
δ - угол заклинения лопасти;
αопт. - угол атаки, соответствующий наибольшему аэродинамическому качеству;
х - параметр функции
унапр.потока(х) - уравнение прямой, вдоль которой следует подводить поток к лопасти для работы винта с наибольшим аэродинамическим качеством;
усредн.лин.профиля(х) - уравнение кривой, образующей лопатку;
nлопаток - количество лопаток;
Rкорн. - радиус корневого сечения лопасти;
Rконц. - радиус концевого сечения лопасти;
RЦ.Т.(х) - радиус центрального тела в конкретной точке.
Rлоп.(x) - радиус края лопатки в конкретной точке.
k1>1 - степень функции кривой, образующий лопатку
k2=0.75…1.25 - коэффициент, определяющий возможные отклонения радиуса лопатки центрального тела от корневого радиуса лопасти.
Набегающий поток, соприкасаясь с лопатками, плавно разворачивается по всей площади ометаемого лопастями ротора диска на оптимальный угол атаки для лопастей ротора, в каком бы положении они не находились.
Затем, подготовленный поток взаимодействует с лопастями ротора. При чем, угол атаки для лопастей будет оптимальный при любой скорости набегающего потока и при любой скорости вращения ротора в заданном направлении.
Таким образом, направляющий аппарат исключает на лопасти срывы потока, при этом уменьшается турбулентность в зоне лопастей ротора, шум и излишняя вибрация, вызванные стыком полей больших и малых скоростей, возникающих при вращении ротора и в отрывной зоне на лопасти.
С целью изучения влияния аппарата оптимизации потока на тягу воздушного толкающего винта в ЦАГИ был проведен эксперимент на модели фюзеляжа, представляющего собой тело вращения с установленным на нем шестилопастным толкающим винтом. Угол установки лопасти винта ϕ=40°. Ранее в ЦАГИ также были проведены экспериментальные исследования данного изолированного винта (без фюзеляжа) и модели без аппарата оптимизации потока.
Эксперимент, проведенный на модели, показал, что аппарат оптимизации потока с увеличением скорости набегающего потока увеличивает тягу воздушного винта (Фиг. 5). Такой эффект мог быть получен только при том условии, что поток подходит к лопастям под оптимальным углом атаки независимо от скорости набегающего потока и скорости вращения винта.
Что касается ветроэнергетики, то проблема с поглощением энергии из ветра по средствам лопастного ротора (турбины), заключается в крайней нестационарности самого ветра. Ветер дует все время с разной скоростью и с разным направлением, в то время как турбина будет оптимально работать только при определенном соотношении скорости набегающего потока и своей скорости вращения.
В случае неоптимальной работы турбины энергия ветра не поглощается турбиной, а рассеивается в виде шума и изменения движения потоков воздуха. Для парирования данной проблемы, роторы ветрогенераторов делают очень большими.
Во-первых, большой ротор способен собрать достаточно энергии для генератора.
Во-вторых, большой ротор обладает достаточной инерцией, чтобы не начать резко тормозить, в случае если в соотношении набегающего потока и скорости вращения, вызовет обратный момент.
В-третьих, ветер в крупных масштабах складывается в относительно стабильный поток.
Аппарат оптимизации потока делает лопастной ротор невосприимчивым к проблеме соотношения скорости набегающего потока и скорости вращения самого ротора, так как он направляет поток всегда под оптимальным углом по отношению к лопастям ротора.
Это позволит поглощать лопастным ротором наибольшее количество энергии из ветра, в результате чего размеры ротора можно значительно уменьшить. Из того же объема воздуха можно поглощать значительно большее количество энергии. Из-за отсутствия срыва на лопастях ротора, будет сильно снижен шум.
Таким образом, искомый технический результат был достигнут: из-за увеличения тяги винта повышен КПД лопастных роторов, снижен шум за счет снижения вихревого отрыва на лопастях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ВОЗДУШНЫЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2010 |
|
RU2454352C2 |
| АППАРАТ ДЛЯ СУСПЕНЗИОННОГО КУЛЬТИВИРОВАНИЯ КЛЕТОК ТКАНЕЙ И МИКРООРГАНИЗМОВ | 1998 |
|
RU2135579C1 |
| Входной направляющий аппарат осевого компрессора ТРД для неравномерного по радиусу канала потока на его входе | 2022 |
|
RU2799742C1 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ТЯГИ БЕЗЛОПАСТНЫМ РОТОРОМ | 2020 |
|
RU2767858C2 |
| ВЕТРОДВИГАТЕЛЬ | 2017 |
|
RU2673021C2 |
| УСТРОЙСТВО И СПОСОБ ПОЛЕТА В ВОЗДУХЕ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2566177C2 |
| ВИХРЕВАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2008 |
|
RU2375603C2 |
| ВОЗДУШНЫЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС СУДНА | 2010 |
|
RU2454351C2 |
| АЭРОГИДРОДИНАМИЧЕСКАЯ РЕШЕТЧАТО-ЩЕЛЕВАЯ СИСТЕМА | 2004 |
|
RU2281225C2 |

Изобретение относится к устройствам оптимизации использования воздушного или гидропотока при применении лопастных роторов и может быть использовано в авиационной технике, водной технике и ветроэнергетике. Аппарат оптимизации потока перед лопастным ротором состоит из центрального тела и одной и более лопаток с плавно возрастающим радиусом от радиуса центрального тела до радиуса законцовки лопасти. Лопатки и центральное тело выполнены по интегральной схеме, т.е. поверхность лопаток плавно переходит в поверхность центрального тела. Аппарат оптимизации потока располагается перед лопастным ротором. Аппарат оптимизации потока подводит поток к лопастям ротора под наиболее оптимальным для них углом атаки. Обеспечивается увеличение тяги винта, повышение КПД лопастных роторов, снижение шума за счет снижения вихревого отрыва на лопастях. 5 ил.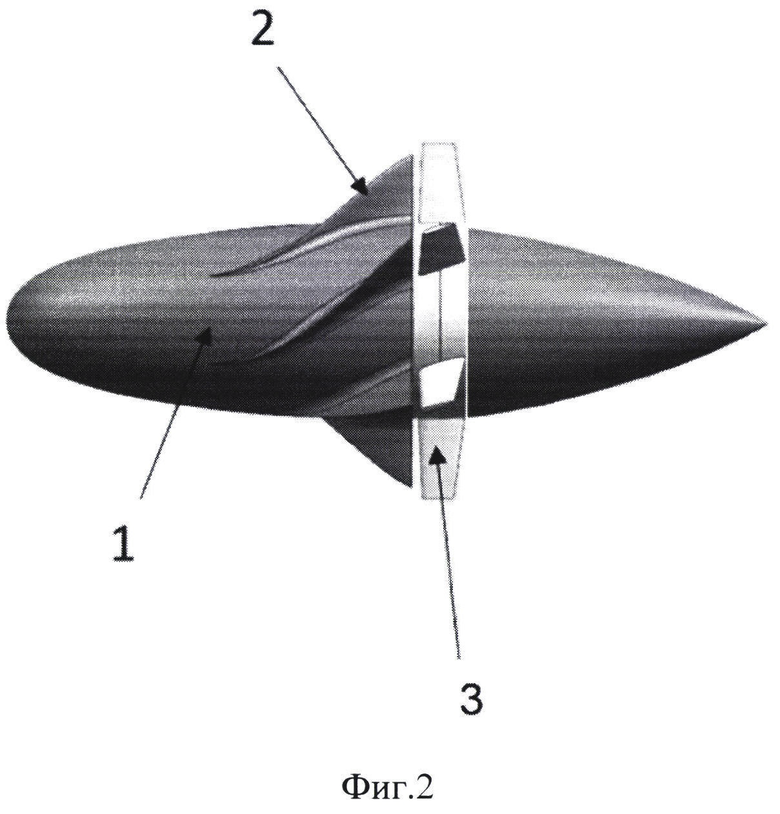
Аппарат оптимизации потока перед лопастным ротором, содержащий центральное тело с установленными на нем одной или более направляющими лопатками, отличающийся тем, что форма направляющих лопаток определена следующими закономерностями:
 ,
,
 ,
,
 ,
,
 ,
,
где:
b - хорда лопатки;
δ - угол заклинения лопасти;
αопт. - угол атаки, соответствующий наибольшему аэродинамическому качеству;
х - параметр функции
усредн.лин.профиля(х) - уравнение кривой, образующей лопатку;
nлопаток - количество лопаток;
Rкорн. - радиус корневого сечения лопасти;
Rконц. - радиус концевого сечения лопасти;
RЦ.Т.(х) - радиус центрального тела в конкретной точке;
Rлоп.(x) - радиус края лопатки в конкретной точке;
k1>1 - степень функции кривой, образующей лопатку;
k2=0.75…1.25 - коэффициент, определяющий возможные отклонения радиуса лопатки центрального тела от корневого радиуса лопасти.
| СПОСОБ УВЕЛИЧЕНИЯ ЭФФЕКТИВНОСТИ ЛОПАСТНОГО ВИНТА | 2007 |
|
RU2381144C2 |
| Приспособление для ограничения хода бабы парового молота | 1929 |
|
SU18428A1 |
| RU 2013105209 A, 20.08.2014 | |||
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| УСТРОЙСТВО ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2004 |
|
RU2262200C1 |
| Способ получения алифатических сложных полиэфиров | 2012 |
|
RU2608821C2 |

