Изобретение относится к области летательных аппаратов с вертикальным взлетом и посадкой.
В настоящее время наибольшее распространение получили летательные аппараты тяжелее воздуха, работающие по принципу «самолета» и «вертолета». У «самолета» подъемная сила создается при помощи аэродинамического крыла, для стабилизации полета и путевого управления используется хвостовое оперение. У «вертолета» подъемную силу создает несущий винт, для стабилизации полета, путевого управления и для компенсации гироскопического момента от несущего винта используется хвостовой винт. У «вертолета» двухвинтовой соосной схемы вращающиеся в разные стороны несущие винты компенсируют гироскопические моменты друг друга. Для создания подъемной силы крыла «самолета» необходимо поступательное движение летательного аппарата, т.е. самолету нужна взлетно-посадочная полоса, для полета нужна тяга, создаваемая двигателями, которая идет на преодоление гидравлического сопротивления. Вращающаяся лопасть вертолета работает аналогично крылу самолета, но так как она постоянно движется вокруг оси винта, то тягу создает постоянно. Следовательно, «вертолет» может взлетать и садиться вертикально, может зависать в воздухе. Для движения в горизонтальной плоскости «вертолет» отклоняет от вертикали направление тяги несущего винта и за счет этого приобретает скорость горизонтального полета. У «вертолета» энергия, создаваемая двигателями, идет на вращение несущего и хвостового винтов, затрачивается на преодоление силы тяжести и создание горизонтальной компоненты тяги для горизонтального полета.
Несомненными преимуществами летательного аппарата, работающего по схеме «самолета», являются экономичность полета (меньший расход энергии на пройденное расстояние) и высокая скорость полета. Преимуществами летательного аппарата, работающего по схеме «вертолета», являются высокая маневренность и вертикальный взлет и посадка.
Известна игрушка типа «летающая тарелка», которую бросают по воздуху от одного игрока к другому. Игрушка представляет собой вращающийся диск в форме перевернутой тарелки, полет осуществляется за счет образования подъемной силы от аэродинамической поверхности (перевернутая тарелка), за счет вращения диска образуется гироскопический момент, придающий конструкции устойчивость. Конструкция дополнительно снабжена светодиодами с питанием от батареек (патент US 4301616, A63H 33/26, опубл. 1981.11.24).
Недостатком такой конструкции является малое время полета, невозможность управлять полетом и необходимость стартового “броска”.
Известна также дискообразная игрушка, имеющая в конструкции серию гибких радиальных направленных внутрь лопастей, выдвинутых за пределы диска, которые значительно изменяют аэродинамические характеристики игрушки. В отличие от игрушек типа летающая тарелка игрушка возвращается к бросившему ее (патент US 5816879, A63H 27/00, A63B 65/10, опубл. 1998.10.06.).
Недостатком такой конструкции является малое время полета, невозможность управлять полетом и необходимость стартового “броска”.
Известно также многодисковое летающее устройство, представляющее собой внешний и средний вращающиеся в противоположных направлениях диски, приводимые во вращение раскручивающейся пружиной кручения. Отогнутые вниз поверхности на каждом диске (лопатки) при вращении генерируют направленную вверх силу, которая увеличивает продолжительность полета устройства. На внутреннем диске расположен руль, направляющий полет устройства так, что он возвращается к точке запуска. Пропеллер, приводимый в движение относительным движением руля и внутреннего диска, создает толкающую вперед силу для полета устройства (патент US 5259802, A63H 27/127, опубл. 1993.11.09.).
Недостатком такой конструкции является малое время полета (повышенные затраты энергии на поддержание устройства в полете) вследствие высокого гидравлического сопротивления при горизонтальном полете и низкая скорость полета (устройство работает по схеме «вертолета» двухвинтовой соосной схемы с дополнительным толкающим движителем).
Известна также конструкция летательного аппарата дискообразной формы, способного погружаться под воду с возможностью вертикального взлета и посадки, прямого горизонтального полета, пространственной маневренности в воздухе,содержащая множество вращающихся в противоположные стороны подъемных роторов с фиксированными или самонастраивающимися лопастями. Способность погружаться под воду достигается за счет модуля морской тяги в виде двух вращающихся в разные стороны гидрокрыльев для создания вертикальной тяги и обычного трубногой морского пропеллера для горизонтального плаванья. Идущий вниз воздух от подъемных роторов используется для маневрирования системой лопаток, расположенных за ротором (патент US 5653404, B64C 29/00, B64C 11/46, B64C 27/10 опубл. 1997.08.05.).
Недостатком такой конструкции является низкая экономичность полета (повышенные затраты энергии на поддержание устройства в полете) вследствие высокого гидравлического сопротивления при горизонтальном полете и низкая скорость полета (устройство работает по схеме «вертолета»).
Известна также конструкция летательного аппарата, имеющего парные движители, вращающиеся в разные стороны в корпусе. Корпус имеет настраиваемое воздушное направляющее устройство для роторного потока и внешний аэродинамический профиль для создания подъемной силы на горизонтальном полете. Устройство, направляющее воздух, включает круговую схему установки множества индивидуальных секторов, имеющих тангенциальную установку лопаток, расположенных в определенном порядке в зонах ниже ротора. В каждом секторе лопатки регулируются в своих позициях по потоку ротора. В меньшей части секторов лопатки располагаются в парах для настройки перемещения в противоположном направлении. Устройство, направляющее воздух, допускает точный и легкий контроль маневров летательного аппарата (патент US 5064143, B64C 29/00, опубл. 1991.11.12.).
Известна также конструкция летательного аппарата, который состоит из куполообразного салона, перекрытия, машинного отделения с моторами, редуктора, винта вертикального подъема, вертикального вала, подшипниковой опоры, катушки и трех опорных колес. В конструкции летательного аппарата применено составное кольцеобразное крыло, состоящее из подвижного и неподвижного крыльев. Неподвижное крыло прикреплено к машинному отделению ниже потолка перекрытия, подвижное крыло входит в состав винта вертикального подъема, соединено неподвижно со ступицей ребрами и шарнирно с лопастями винта. Достигается увеличение безопасности, маневренности и управляемости в полете (патент RU 2365522, B64C 39/06; B64C 27/20; B64C 29/02, опубл. 2009.08.27).
Недостатками такой конструкции являются низкая экономичность полета (повышенные затраты энергии на поддержание устройства в полете) вследствие высокого гидравлического сопротивления при горизонтальном полете и низкая скорость полета (устройство работает по схеме «вертолета»).
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ полета с возможностью вертикального взлета и посадки, включающий создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанных с двигателем двух роторных движителей, вращающихся в противоположные стороны, с лопастями, направляющими поток воздуха из окружающего пространства радиально и параллельно поверхности, что изменяет давление в замкнутом объеме у аэродинамической поверхности с образованием потока воздуха сверху вниз, и перепада давления на несущую плоскость, приводящим к созданию подъемной силы, при этом путем изменения углов поворота вертикальных и горизонтальных управляющих плоскостей регулируют положение аэродинамической поверхности в пространстве, при этом продольные оси лопастей располагают вертикально и по окружности, занимающей большую часть несущей плоскости, в режиме взлета и посадки обеспечивают постоянные углы атаки лопастей, направляют воздух радиально-горизонтально и создают перепад давления на несущую плоскость и подъемную силу за счет изменения давления в замкнутом объеме у аэродинамической поверхности, а при горизонтальном полете изменяют угол атаки лопастей роторного движителя в период каждого оборота, направляют воздух горизонтально обратно направлению движения или частично радиально и создают горизонтальную силу тяги, а подъемную силу создают за счет движения несущей плоскости под углом атаки или частично за счет изменения давления в замкнутом объеме у аэродинамической поверхности. При этом горизонтальный поток воздуха создают с использованием дополнительных реактивных движителей, а несущая плоскость выполнена в форме «летающей тарелки» (патент RU 2414388, B64C 29/00; B64C 33/00, опубл. 2011.03.20).
Недостатками такой конструкции являются низкая экономичность полета (повышенные затраты энергии на поддержание устройства в полете) вследствие высокого гидравлического сопротивления при горизонтальном полете и низкая скорость полета (устройство работает по схеме «вертолета»).
Задача изобретения - увеличение экономичности полета (уменьшение затрат энергии на поддержание устройства в полете) вследствие уменьшения гидравлического сопротивления при горизонтальном полете, повышение скорости полета с сохранением высокой маневренности и возможности вертикального взлета и посадки летательного аппарата.
Технический результат - уменьшение гидравлического сопротивления летательного аппарата при горизонтальном полете при сохранении высокой маневренности и возможности вертикального взлета и посадки.
Поставленная задача решается, а технический результат достигается тем, что в способе полета с возможностью вертикального взлета и посадки, включающем создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанных с двигателем роторных движителей с лопатками, имеющими возможность поворота вокруг своей продольной оси, с изменением угола атаки, роторные движители расположены соосно и имеют возможность вращаться в противоположные стороны, что компенсирует их гироскопические моменты, лопатки направляют поток воздуха из окружающего пространства по вертикали сверху вниз, что создает перепад давлений на несущую поверхность, при этом путем изменения углов поворота лопаток роторных движителей в период каждого оборота создают неравномерность поля давлений под несущей плоскостью, что осуществляет образование горизонтальной составляющей вектора тяги и стабилизацию полета, компенсацию порывов ветра в режиме кратковременного горизонтального полета; горизонтальную составляющую вектора тяги в режиме продолжительного горизонтального полета создают при помощи дополнительного реактивного движителя - маршевого двигателя, установленного в горизонтальной плоскости, согласно изобретению, посредством поворота лопаток роторного движителя в режиме продолжительного горизонтального полета до угла атаки 0° лопатки образуют замкнутую аэродинамическую поверхность - вращающееся крыло с возможностью создания подъемной силы.
Поставленная задача решается, а технический результат достигается также при помощи устройства для полета в воздухе с возможностью вертикального взлета и посадки, содержащего несущую плоскость, образованную аэродинамической поверхностью, связанных с двигателем роторных движителей с лопатками, имеющими возможность поворота вокруг своей продольной оси, при этом роторные движители расположены соосно и имеют возможность вращаться в противоположные стороны, дополнительный реактивный движитель обеспечивает создание горизонтальной составляющей вектора тяги, несущая плоскость выполнена в форме «летающей тарелки», согласно изобретению роторные движители соединены с двигателем через систему привод - редуктор, лопатки соединены с системой перекоса, гироскопом и системой управления, а их наружные кромки объединены аэродинамическим обтекателем, при этом двигатель, система привод - редуктор, система перекоса, гироскоп и система управления защищены верхним и нижним корпусами-обтекателями, лопатки выполнены с возможностью образовывать замкнутую аэродинамическую поверхность, а совместно с аэродинамическим обтекателем и корпусами-обтекателями образовывать несущую плоскость.
Существо изобретения поясняется чертежами.
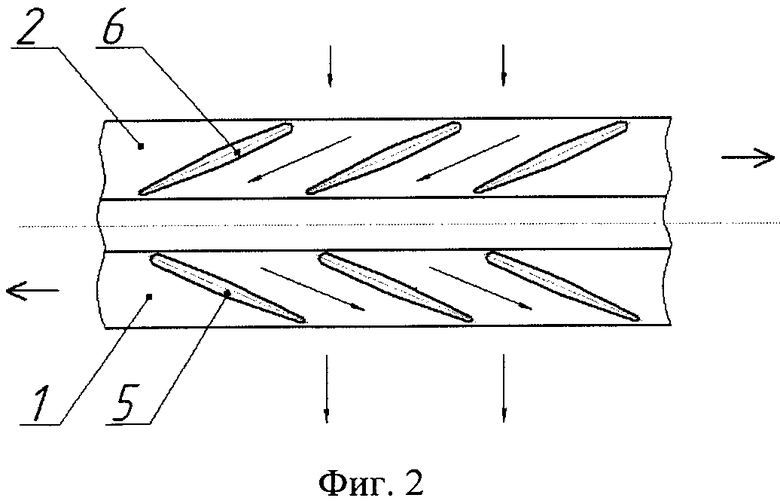
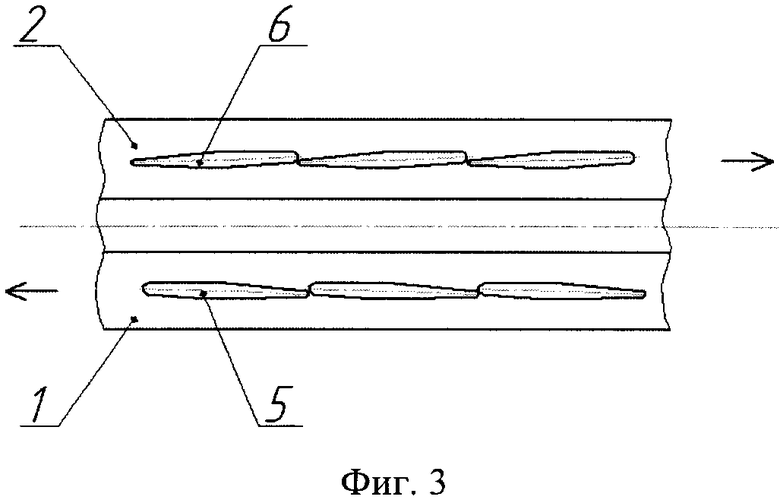
На фиг.1 изображена схема летательного аппарата. На фиг.2 изображена схема положения лопаток роторных движителей на режиме вертикального полета, взлета и кратковременного горизонтального полета (маневрирования). На фиг.3 изображена схема положения лопаток роторных движителей на режиме долговременного горизонтального полета.
Летательный аппарат (фиг.1) состоит из нижнего и верхнего роторных движителей 1 и 2, имеющих возможность вращаться в разные стороны, соединенные с двигателем 3 через систему привод - редуктор 4.
На роторных движителях 1 и 2 установлены комплекты лопаток 5 и 6 соответственно, имеющие возможность поворота вокруг своей продольной оси (изменения угла атаки), соединенные с системой перекоса 7, в свою очередь, соединенную с гироскопом 8. Наружные кромки лопаток 5 и 6 объединяются аэродинамическим обтекателем 9 и 10 соответственно, создающим минимальное гидравлическое сопротивление при продолжительном горизонтальном полете, и образуют вторую подвижную опору для лопаток 5 и 6. Горизонтальная составляющая вектора тяги создается маршевым двигателем 11, установленным в горизонтальной плоскости в верхнем корпусе-обтекателе 12, который защищает агрегаты и образует обтекаемый аэродинамический профиль. С нижней полусферы агрегаты защищает и образует несущую плоскость нижний корпус-обтекатель 13, в котором закреплены опоры (стойки) устройства 14. Углы установки лопаток 5 и 6 как общие (для всех лопаток), так и индивидуальные для каждой лопатки в зависимости от периода оборота определяются системой перекоса 7, соединенной с гироскопом 8 и системой управления 15.
Во время работы в режиме взлета от двигателя 3 вращение передается через привод-редуктор к роторным движителям 1 и 2, вращающимся в разные стороны и взаимно компенсирующим гироскопические моменты друг друга, повышающим устойчивость летательного аппарата. Лопатки 5 и 6, установленные на роторных движителях 1 и 2 в режиме вертикального полета, взлета и кратковременного горизонтального полета (маневрирования), установлены под некоторым углом к горизонтальной оси и создают вертикальную компоненту тяги.
При наборе достаточной высоты, при окончании маневрирования происходит переход в режим продолжительного горизонтального полета, включается маршевый двигатель 11, создающий горизонтальную составляющую вектора тяги, изменяются углы установки лопаток 5 и 6 до 0°, образуется замкнутая аэродинамическая поверхность (вращающееся крыло), создающая подъемную силу на этом режиме. Корпуса (обтекатели) 12 и 13 вместе с лопатками роторного движителя 5 и 6 образуют аэродинамическую поверхность.
Переход от режима продолжительного горизонтального полета к режиму маневрирования, кратковременного горизонтального полета или посадке осуществляется в обратном порядке. Посадка аппарата на землю осуществляется на опоры 14, установленные в нижнем корпусе-обтекателе 13. Аэродинамические обтекатели 9 и 10 на режиме взлета/посадки, маневрирования и кратковременного горизонтального полета препятствуют горизонтальному перетеканию воздуха из лопаток 5 и 6 роторных движителей 1 и 2, а на режиме длительного горизонтального полета аэродинамический обтекатель капотирует лопатки 5 и 6, создает минимальное гидравлическое сопротивление набегающему потоку. Поворот аппарата вокруг вертикальной оси осуществляется изменением частоты вращения одного роторного движителя относительно другого (1 и 2). Перекладка лопаток (изменение угла атаки) 5 и 6, изменение частот вращения роторных движителей 1 и 2, включение и выключение маршевого двигателя происходит по командам системы управления 15. При маневрировании или в режиме кратковременного горизонтального полета лопатки 5 и 6 роторных движителей 1 и 2 устанавливаются с индивидуальными углами в зависимости от периода оборота, за счет чего создается горизонтальная компонента вектора тяги.
Преимущество предлагаемого способа - сочетание высокой маневренности, возможностью вертикального взлета, посадки и высокой скорости, высокой экономичности в режиме продолжительного (длительного) горизонтального полета.
Изобретение относится к области авиации, в частности к конструкциям и способам полета летательных аппаратов вертикального взлета и посадки. Способ полета включает создание воздушного потока, направленного сверху вниз, соосными движителями с лопатками, вращающимися в противоположные стороны. Лопатки имеют возможность вращения вокруг своей продольной оси с изменением угла атаки. Путем изменения углов поворота лопаток движителей в период каждого оборота обеспечивают создание горизонтальной составляющей вектора тяги и стабилизацию полета. Горизонтальную тягу в режиме установившегося горизонтального полета создают реактивным движителем. Посредством поворота лопаток движителя до угла атаки 0° в режиме продолжительного горизонтального полета образуют замкнутую аэродинамическую поверхность - вращающееся крыло с возможностью создания подъемной силы. Движители соединены с двигателем через систему привод - редуктор. Лопатки движителя соединены с системой перекоса, гироскопом и системой управления. Повышается маневренность, скорость, экономичность летательного аппарата в режиме горизонтального полета. 2 н.п. ф-лы, 3 ил.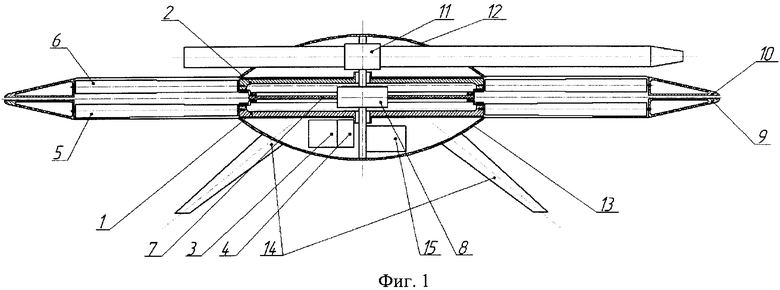
1. Способ полета с возможностью вертикального взлета и посадки, включающий создание воздушного потока путем использования аэродинамической поверхности, являющейся несущей плоскостью, и с использованием связанных с двигателем роторных движителей с лопатками, имеющими возможность поворота вокруг своей продольной оси с изменением угла атаки, роторные движители расположены соосно и вращаются в противоположные стороны, что компенсирует гироскопические моменты, лопатки направляют поток воздуха из окружающего пространства по вертикали сверху вниз, что создает перепад давлений на несущую поверхность, при этом путем изменения углов поворота лопаток роторных движителей в период каждого оборота создают неравномерность поля давлений под несущей плоскостью, чем обеспечивают образование горизонтальной составляющей вектора тяги и стабилизацию полета, компенсацию порывов ветра в режиме кратковременного горизонтального полета, при этом горизонтальную составляющую вектора тяги в режиме продолжительного горизонтального полета создают при помощи дополнительного реактивного движителя - маршевого двигателя, установленного в горизонтальной плоскости, отличающийся тем, что посредством поворота лопаток роторного движителя в режиме продолжительного горизонтального полета до угла атаки 0° образуют замкнутую аэродинамическую поверхность - вращающееся крыло с возможностью создания подъемной силы.
2. Устройство для полета в воздухе с возможностью вертикального взлета и посадки, содержащее несущую плоскость, образованную аэродинамической поверхностью, связанные с двигателем роторные движители с лопатками, имеющими возможность поворота вокруг своей продольной оси, при этом роторные движители расположены соосно и имеют возможность вращаться в противоположные стороны, дополнительный реактивный движитель, причем несущая плоскость выполнена в форме «летающей тарелки», отличающееся тем, что роторные движители соединены с двигателем через систему привод - редуктор, лопатки соединены с системой перекоса, гироскопом и системой управления, а их наружные кромки объединены аэродинамическим обтекателем, при этом двигатель, система привод - редуктор, система перекоса, гироскоп и система управления защищены верхним и нижним корпусами-обтекателями, лопатки выполнены с возможностью образования замкнутой аэродинамической поверхности, а совместно с аэродинамическим обтекателем и корпусами-обтекателями - с возможностью образования несущей плоскости.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 3025022 A1, 13.03.1962 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "ТУРБОЛЕТ-М" | 2006 |
|
RU2307768C1 |
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И РОТОРОПЛАН С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2009 |
|
RU2414388C1 |
| US 75559506 B2, 14.07.2009 | |||

