Область техники, к которой относится изобретение.
В63Н 1/36
В63Н 3/00
А63В 31/11
В63Н 3/00
Транспортирование; лопастные движители; судовые движители с колебательным движением; гребные винты с перестановкой лопастей; принадлежности для облегчения плавания.
Уровень техники.
Гребной винт при всех своих преимуществах имеет ограничения в применении, например в снаряжении для подводного плавания, в связи с громоздкостью и сложностью конструкции. На скоростных режимах гребной винт имеет проблемы, связанные с кавитацией на лопастях и шумом.
Дополнительная сложность состоит в том, что различным скоростям движения при одной и той же частоте вращения винта соответствуют различные установочные углы лопастей, дающие оптимальные характеристики. Это приводит к необходимости использования винтов изменяемого шага, требующих помимо усложнения собственной конструкции также отдельной системы контроля и управления шагом. Известны конструкции воздушных и гребных винтов, в которых лопасти меняют свой установочный шаг в зависимости
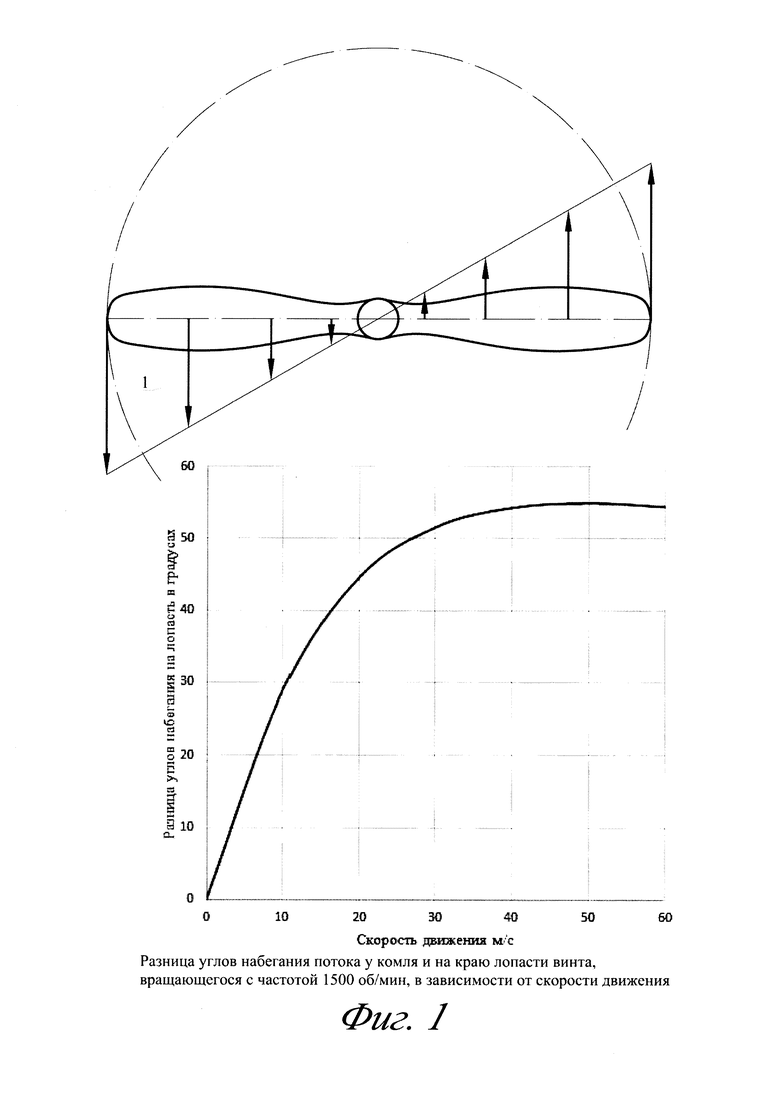
Кроме того, поскольку угол атаки каждого сечения по радиусу лопасти винта обусловлен наложением взаимно перпендикулярных скоростей вращения и набегающего потока, потребная разница установочных углов лопасти у комля и у законцовки винта меняется в зависимости от скорости движения, как это показано на схеме и графике фиг. 1, где поз.1 обозначена линейная местная скорость вращения лопасти винта. Соответственно, условия обтекания лопасти винта оказываются оптимальными только при определенной скорости движения.
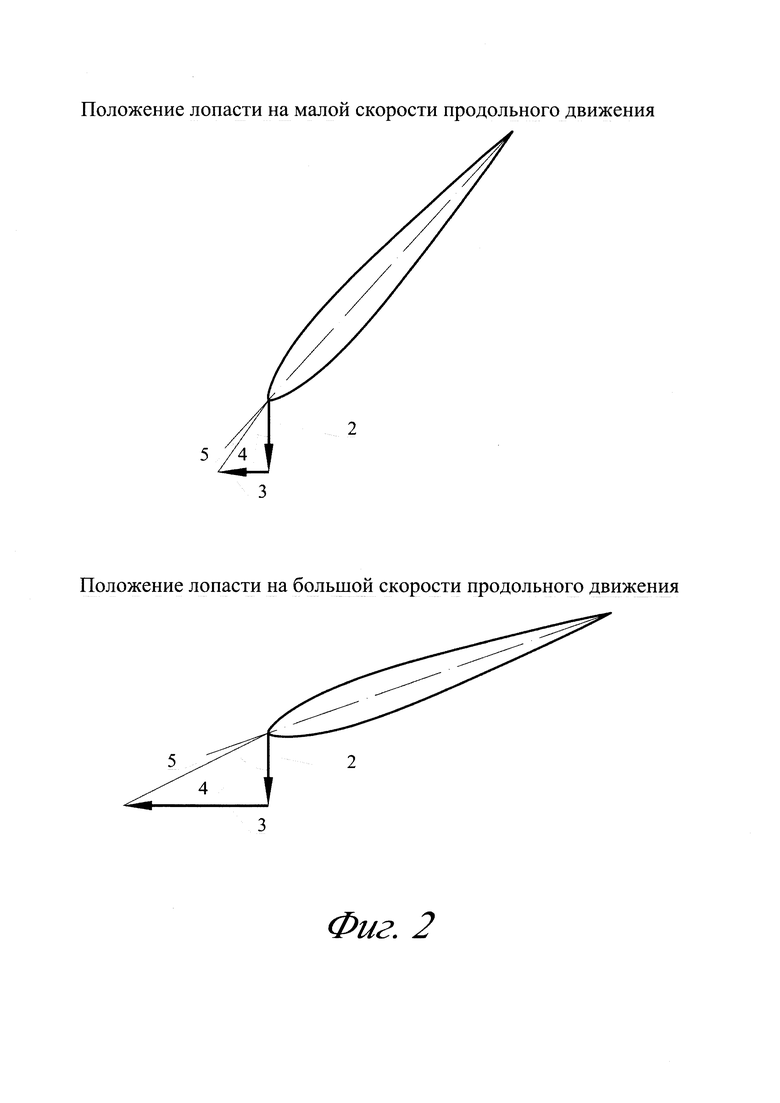
Плавниковый движитель, использующийся для подводного и скоростного плавания, менее подвержен кавитации и не имеет присущих винту проблем, вызванных круткой лопастей по радиусу (фиг. 1). Однако и он требует изменения установочного угла при изменении скорости движения - на малых скоростях эффективный гребок производится сильно отклоненной несущей плоскостью (лопастью), но по мере увеличения скорости движения угол наклона лопастей должен уменьшаться (схема на фиг. 2). На данной фигуре обозначены: 2 - вектор скорости махового движения (показан момент, когда оно направлено вниз), 3 - вектор скорости продольного движения, 4 - угол набегания потока, 5 - угол атаки. Попытки решить эту проблему обычно сводятся к установке несущих плоскостей на подпружиненных или упругих рычагах, например как предложено в изобретениях US6290561, US5746631, US4944703, US4767368, US4178128, US3122759, RU2075320C1, и как используется в ластах торговой марки «Scubapro Seawing Nova Fin»; или к установке лопастей на оси с ограничителем поворота, как предложено например в изобретениях US3084355, US3411165, US3426722, US4209866, US4738645, US4738645. В первом случае при неизменном усилии на ласт пружина дает изгиб на одинаковый угол, во втором случае ограничитель устанавливает лопасть также на один и тот же угол, вне зависимости от скорости движения. То есть все эти технические решения не позволяют сделать плавниковый движитель эффективным на всех эксплуатационных режимах.
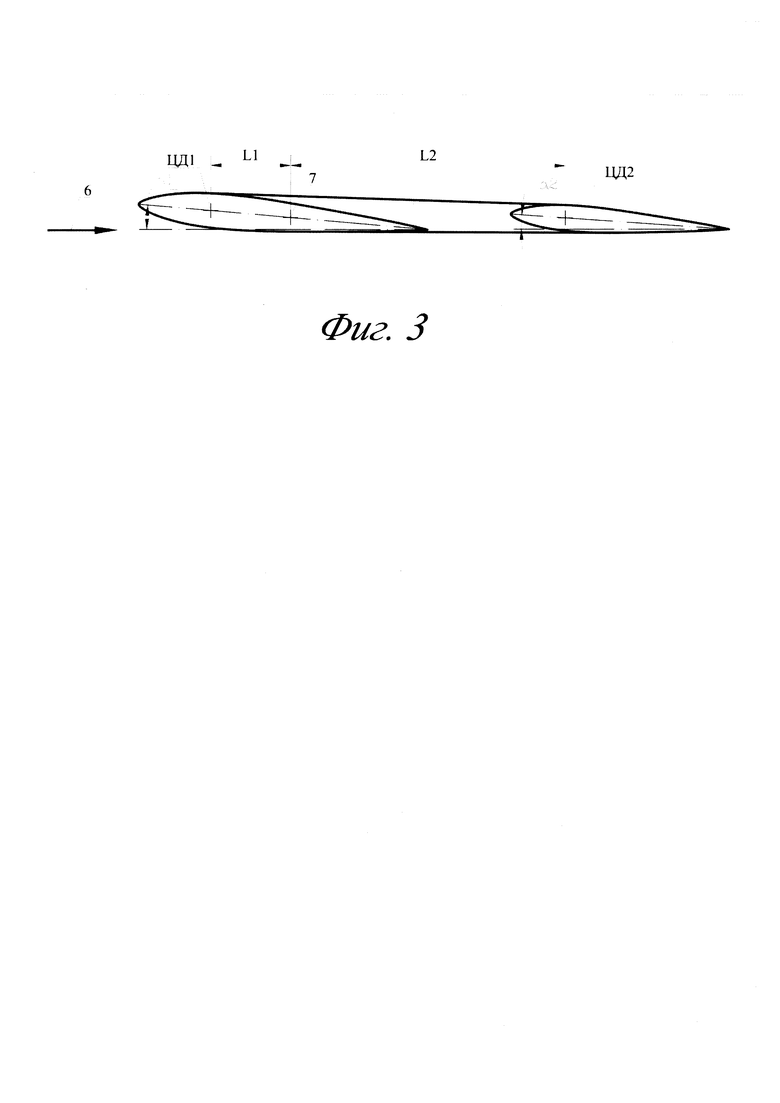
Исключением является попытка заставить движущую плоскость стабилизироваться по потоку самостоятельно, как это делает несущая система самолета. Рассмотрим, какие условия необходимо для этого соблюсти. Пусть движитель состоит из двух лопастей, связанных друг с другом, как это показано на схеме фиг. 3. На данной фигуре обозначены: поз.6 - вектор скорости набегающего потока V, поз.7 - ось вращения.
Обозначим точками ЦД1 и ЦД2 центры приложения равнодействующих гидродинамических сил (центры давления) лопастей 1 и 2 соответственно. Для упрощения примем, что профили лопастей симметричны, и их центры давления располагаются на линии четверти хорд профилей. На эффективных, достаточно малых углах атаки, коэффициент подъемной силы Суа растет прямо пропорционально углу атаки а, в общем случае разном у лопастей 1 и 2 (обозначим его α1 и α2 соответственно), поэтому Суа лопастей можно выразить через их производные по углу атаки  Обозначим также площади лопастей как S1 и S2. Для устойчивого состояния системы необходимо равенство моментов подъемных сил лопастей 1 и 2 относительно оси вращения. При этом надо учитывать скос потока за передней лопастью, который по линейной теории также пропорционален углу атаки, и с достаточной степенью приближения может быть учтен по формуле
Обозначим также площади лопастей как S1 и S2. Для устойчивого состояния системы необходимо равенство моментов подъемных сил лопастей 1 и 2 относительно оси вращения. При этом надо учитывать скос потока за передней лопастью, который по линейной теории также пропорционален углу атаки, и с достаточной степенью приближения может быть учтен по формуле  где λ - удлинение лопасти 1. Запишем условие равенства моментов:
где λ - удлинение лопасти 1. Запишем условие равенства моментов:

После сокращений и очевидных преобразований получим:
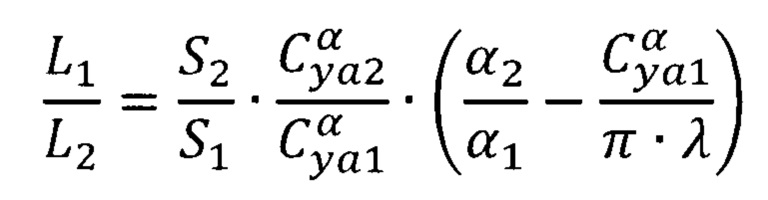
Или для выбора углов при фиксированных плечах L1 и L2.
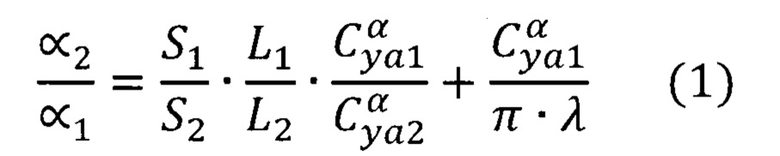
При повороте несущей системы на угол Δα как лопасть 1, так и лопасть 2 получит одинаковое приращение установочного угла атаки, а значит в выражении  приращения этого угла сократятся, и балансировочное отношение останется неизменным.
приращения этого угла сократятся, и балансировочное отношение останется неизменным.
Итак, для системы из двух лопастей мы можем подобрать L1 и L2 так, чтобы лопасти выставились на заданный угол атаки. Но при этом выбранное положение должно быть устойчивым. То есть при действии возмущения, увеличившего угол набегания потока на Δα, система должна стремиться уменьшить свой угол атаки, и наоборот, при уменьшении угла набегания система должна стремиться свой угол атаки увеличить. Как этого добиться?
Запишем условие необходимого нам возвращающего к равновесию действия моментов при приращении угла Δα в виде неравенств:

Сократив и сгруппировав члены, получим:

Но согласно определенному нами ранее условию (1) левая часть неравенств равна  и мы можем записать:
и мы можем записать:
Группируя члены и сокращая, получим: α2<α1. То есть, чтобы несущая система была статически устойчива, задняя несущая плоскость должна иметь меньший установочный угол, чем передняя. Причем это относится как к разнесенным плоскостям, так и соединенным в единый S-образный профиль, называемый также автостабильным.
Поскольку движитель с колеблющимися лопастями требует периодической смены направления движения, то для стабилизации на заданном угле атаки лопастям придают возможность менять установочные углы путем перекладки попарно установленных лопастей на противостоящие друг другу ограничители, закрепленные на оси вращения, или доворачивать рабочие лопасти приводом от направляющей, также установленной на шарнире, как это предложено в патенте на конструкцию ласт US5536190. К сожалению, такие конструкции показали себя слишком сложными и громоздкими для плавания, при этом они не позволяли заходить в воду в ластах и становиться ими на грунт.
В авторском свидетельстве СССР №146201 был предложен гребной винт, самостоятельно изменяющий свой шаг в зависимости от скорости движения и оборотов вала, благодаря разделению его по радиусу на два участка - рабочий и направляющий. Действующий подобно флюгеру (поддерживающий околонулевой угол атаки в рабочем режиме) участок лопасти у комля доворачивал рабочий участок у края лопасти на необходимый угол атаки. К сожалению, такое решение приводит к неравномерности скоростного поля за винтом и неполному использованию ометаемой площади, что снижает эффективность движителя.
Раскрытие изобретения.
Более выгодным представляется самоустановка лопасти винта по мере изменения скорости в промежуточное положение, когда сечения у комля имеют превышающий оптимум угол атаки, а сечения у законцовки работают с несколько заниженным углом, при этом сечения винта взаимоконкурируют за выбор установочного угла. Этого можно достичь только при использовании стабилизирующей поверхности вдоль всей лопасти винта, например в виде автостабильного профиля, или пар лопастей на едином шарнире (Х-образный винт с двумя шарнирами, на каждом из которых закреплены по паре ближайших лопастей), при этом для обеспечения стабилизации вторая лопасть в паре должна иметь меньший установочный угол, чем первая. Распределение стабилизирующей поверхности по всему размаху лопасти позволяет, как и в описанном авторском свидетельстве, получать реверс тяги при смене направления вращения, но для обеспечения реверса без смены направления вращения потребуется применение управляемой стабилизирующей поверхности или винта изменяемого шага с приводом поворота лопастей.
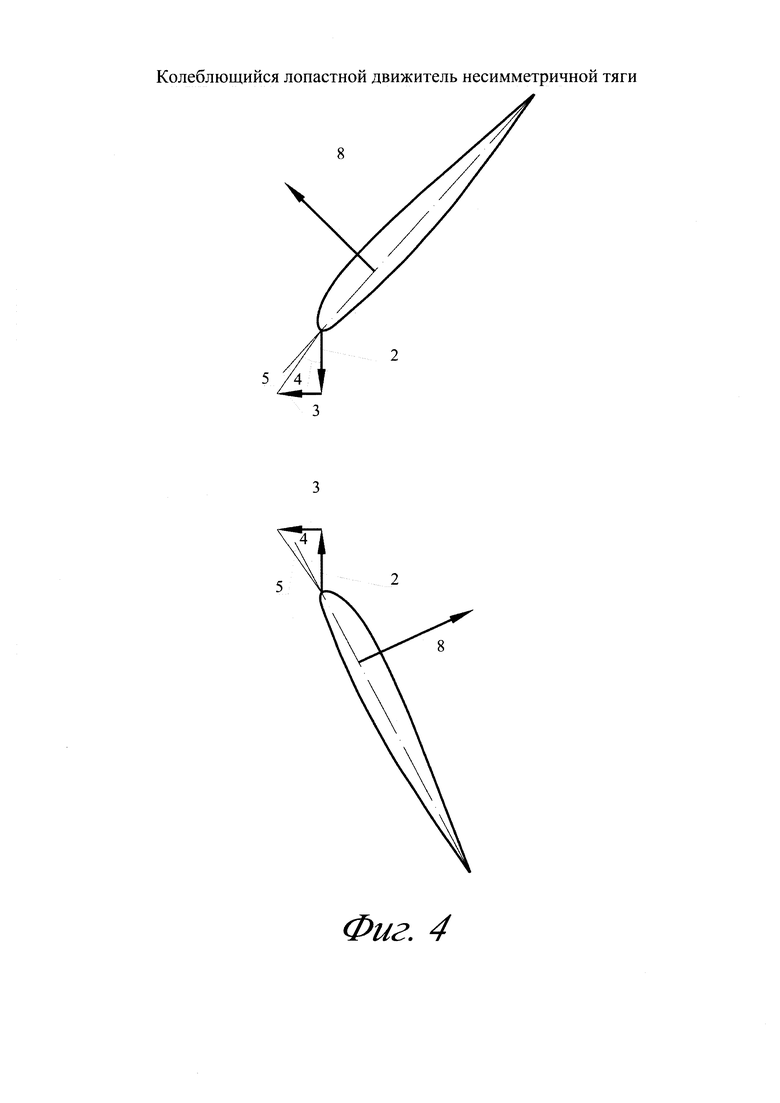
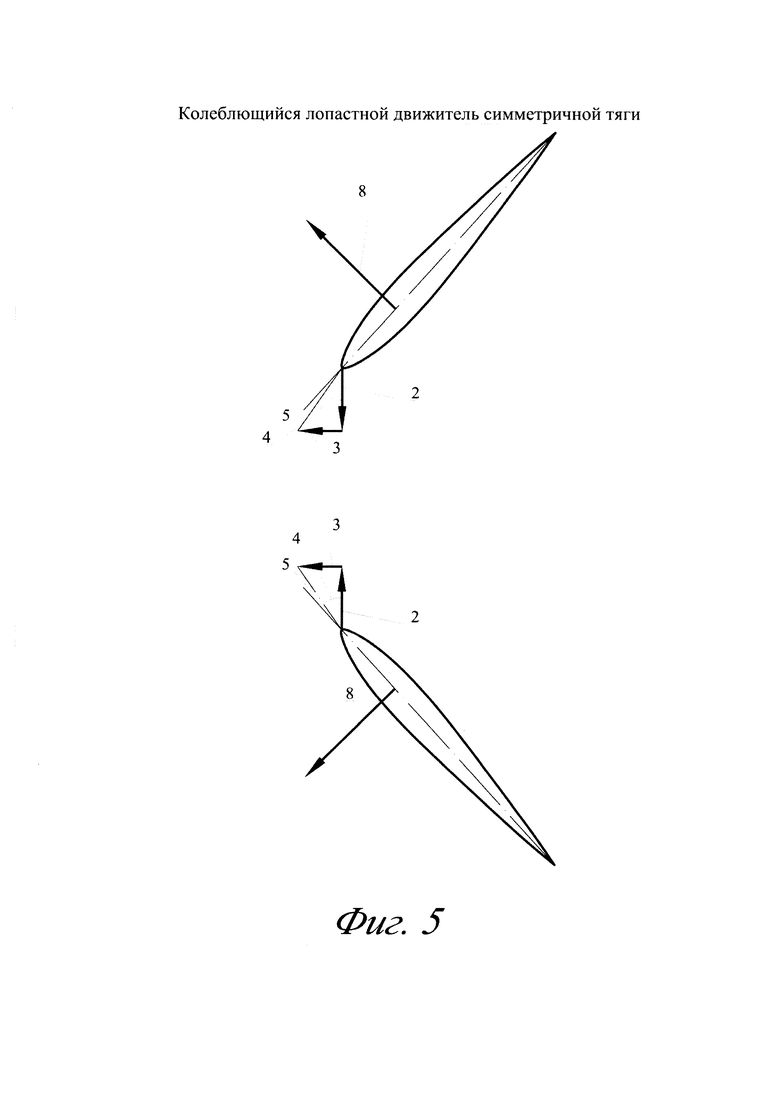
Для судна с колеблющимися подводными крыльями для автостабилизации несущих плоскостей по потоку достаточно устанавливать их на шарниры и использовать автостабильные профили, чтобы получить и тягу, и подъемную силу, как показано на схеме фиг. 4. Здесь поз.8 обозначена результирующая аэродинамическая сила. Но колеблющемуся лопастному движителю типа ласта или аналога гребного винта требуется симметричная знакопеременная боковая сила, как показано на схеме фиг. 5.
Поскольку известные технические решения, позволяющие лопастям менять свои установочные углы при каждом махе, проявили себя не лучшим образом, возникает вопрос - можно ли стабилизировать систему несущих элементов так, чтобы их угол атаки менял свой знак вслед за сменой направления поперечного движения, а сами несущие элементы оставались неподвижны друг относительно друга? Для ответа на этот вопрос обратим внимание на влияние вязкости потока на обтекание системы несущих элементов.
Набегающий поток обтекает не только профили лопастей, но и заторможенный пограничный слой вокруг них. Лопасти, окутанные «налипшим» на них пограничным слоем, образуют для набегающего потока фиктивное тело, или тело вытеснения. На положительных углах атаки толщина пограничного слоя у задней кромки лопасти на верхней поверхности больше, чем на нижней, из-за большего перепада давления. Дополнительное утолщение сверху пограничный слой получает, перетекая снизу в верх через щель между первой и второй лопастью несущей системы. Поэтому профиль тела вытеснения имеет среднюю линию, немного отклоняющуюся вверх, как у автостабильного аэродинамического профиля, и тем сильнее, чем шире и сильнее разнесены профили несущей системы, чем толще крыловые профили в них используются, чем сильнее смещена к носику их максимальная толщина, и чем больше угол атаки (схема на фиг. 6). На данной фигуре обозначены: поз.9 - передний профиль несущей системы, 10 - задний профиль несущей системы, 11 - пограничный слой, 12 - средняя линия профилей несущей системы, 13 - средняя линия профиля тела вытеснения.
Таким образом, два симметричных аэродинамических профиля, установленных друг за другом с нулевым установочным углом, в вязкой среде при правильно выбранной координате оси вращения могут иметь зону устойчивости по углу атаки. При выборе координаты оси вращения меньше или равной координате центра давления первого профиля система будет флюгироваться на нулевом угле атаки. При выборе координаты оси вращения в центре давления системы, она окажется безразличной к углу атаки, и стабилизация окажется невозможной. Соответственно, чтобы стабилизировать систему, нужно выбрать координату оси вращения между указанными крайними точками.
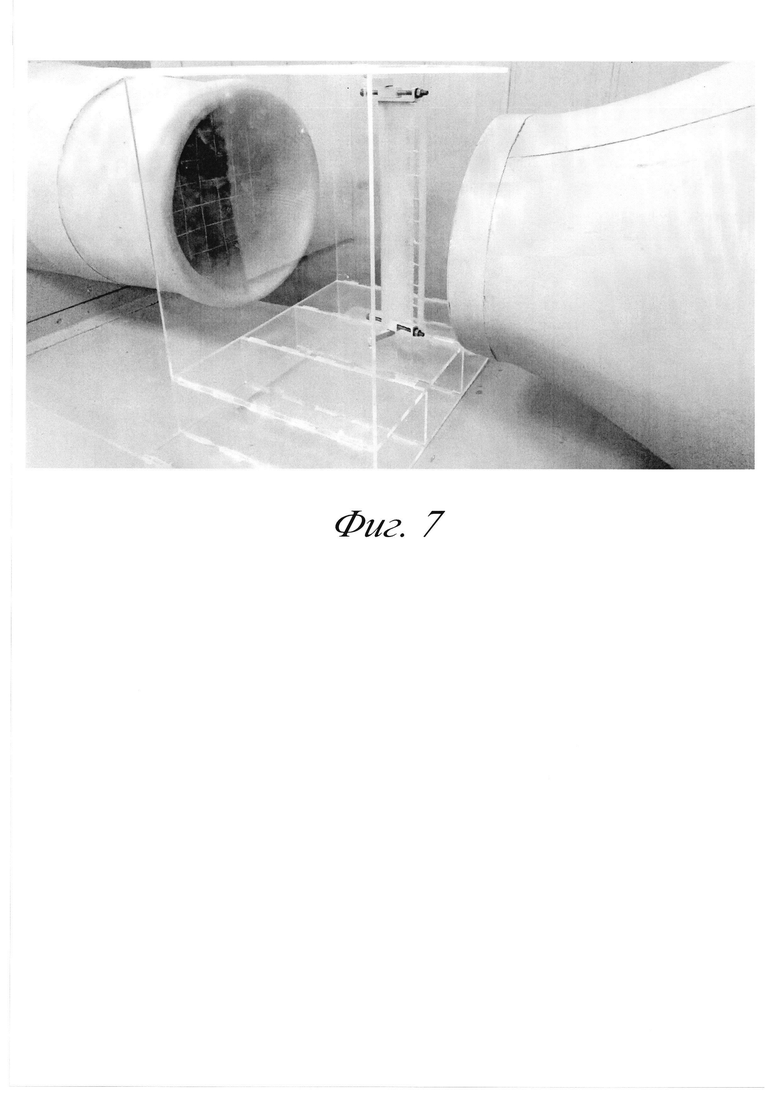
На лабораторной аэродинамической трубе кафедры 101 МАИ экспериментально получена стабилизация модели в виде установленного на шарнире крыла размахом 250 мм с симметричным профилем относительной толщиной 12%, хордой 50 мм, и прикрепленного к крылу сзади на расстоянии 5 мм стабилизатора с профилем такой же относительной толщины и хордой 10 мм, на углах атаки от 9 градусов и выше (фиг. 7). На меньших углах атаки система начинала вести себя нестабильно, периодически перекладываясь с положительного угла атаки на отрицательный и обратно. Изменение углов атаки модели достигалось путем смещения ее оси вращения, для чего в экспериментальной установке были предусмотрены сдвижные ложементы.
Итак, мы можем создать колеблющийся лопастной движитель симметричной тяги, используя пару скрепленных друг с другом симметричных крыловых профилей, установленных на оси вращения. Но с таким движителем при смене направления поперечного движения мы получим новую проблему. Разогнавшиеся лопасти в этот момент получают резкую смену направления силы на оси вращения, например с направленной вниз на направленную наверх (схема на фиг. 8). На данной фигуре обозначены: 14 - вектор силы от приводной балки, 15 - вектор гидродинамической силы на лопасти, 16 - вектор гидродинамической силы на стабилизаторе. Следуя за сменившимся направлением силы, несущая система перебалансируется на зеркально противоположный относительно направления набегания угол атаки, пытаясь «убежать» от притягивающего движения, упрется (фиг. 8б). Как это предотвратить?
Можно в момент убегания лопасти (фиг. 8б) переключить ось ее вращения на носик переднего профиля несущей системы. Тогда удаляясь по инерции от приводного штока или балки, лопасть автоматически довернется на направление набегания, после чего ось вращения можно вернуть на место.
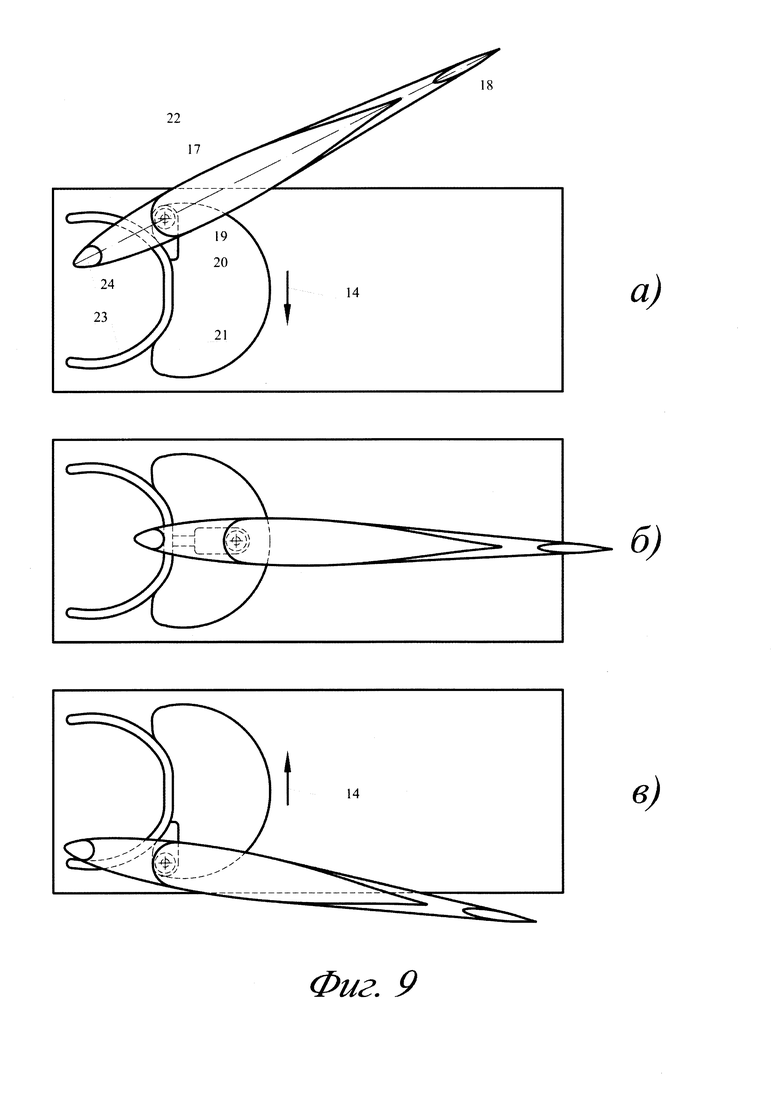
Технически это можно реализовать следующим образом (фиг. 9). Лопасть 17 с жестко закрепленным на ней стабилизирующим крыловым элементом 18 имеет возможность свободно вращаться на оси 19 водила 20, качающегося на оси или гибком звене внутри паза 21 приводной балки 22. На фиг. 9а показано водило в положении верхнего упора, на фиг. 9б - в промежуточном положении при прохождении плоскости симметрии, и на фиг. 9в - в положении нижнего упора. На приводной балке выполнена направляющая 23, ограничивающая угловое положение лопасти в крайних положениях и при проходе лопасти через плоскость симметрии посредством зацепления с ответным элементом (в данном случае кулачком) лопасти 24. На фиг. 9а показана лопасть в тяговом режиме на самостоятельно выбранном угле атаки, а на фиг. 9б и 9в угловое положение лопасти ограничивается направляющей.
При боковом движении приводной балки лопасть стремится в противоположном движению направлении и вперед, увлекая за собой водило, пока оно не ложится на упор паза. Лежа на упоре паза, водило передает тягу лопасти на приводную балку. При смене направления движения лопасть увлекается в противоположном направлении, снимает водило с упора и ведет его через плоскость симметрии на противоположный упор. При проходе плоскости симметрии направляющая подхватывает носик лопасти, переводя ее на нулевой угол атаки, после чего дает лопасти возможность самоустановиться на новом рабочем угле атаки, и передать тягу на приводную балку после фиксации водила на противоположном упоре.
Возможные области применения изобретения
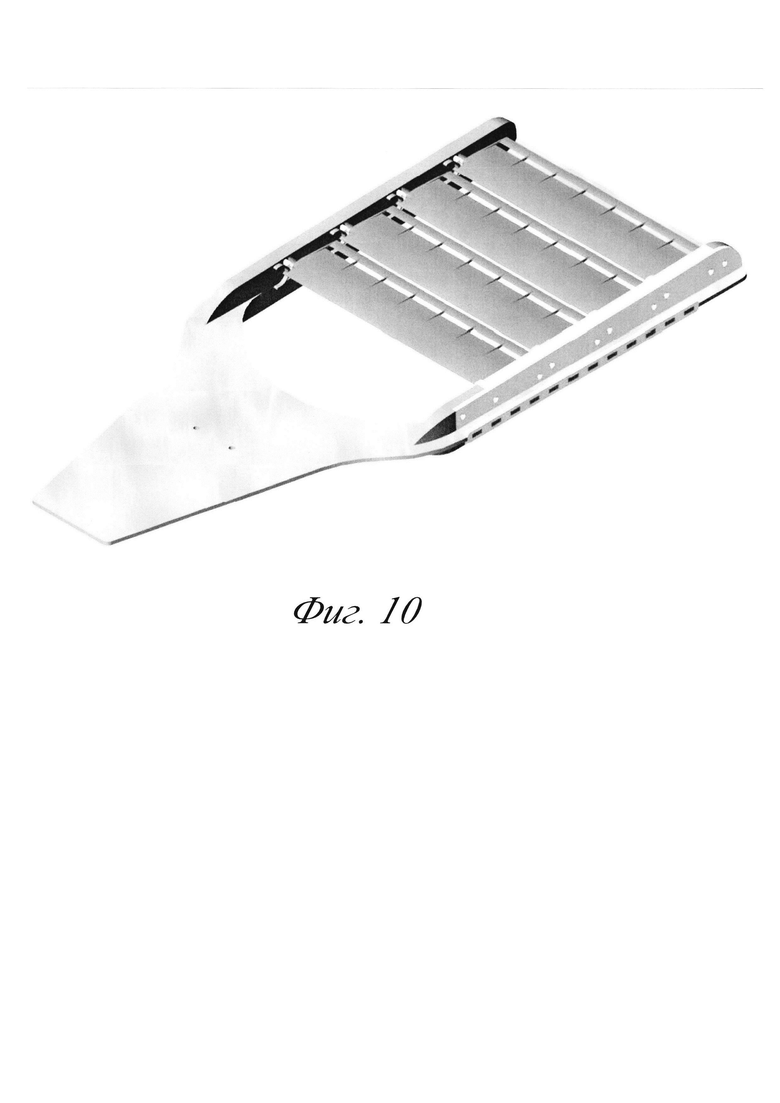
Предложенное техническое решение может оказаться эффективным как для привода судов, в том числе на подводных крыльях, так и в подводном снаряжении ныряльщиков, таком как ласты на фиг. 10 (галоша ласта условно не показана, упругость гибких звеньев водил подобрана таким образом, чтобы лопасти без нагрузки не провисали).
Также применяются подводные крылья (гидрофойлы) и в водном спорте, например в серфинге. Одним из способов поддержания движения спортивного снаряда на гидрофойле является так называемый пампинг, когда спортсмен стоит на борде, периодически приседая, при этом перенося вес вначале на переднюю, а затем на заднюю ноги. Однако в известных конструкциях крылья закреплены на борде, лыжах или другом плавательном средстве неподвижно (например патенты US3121890, US3164119, US3604031, US3747138, US3182141, US2751612, US7144285, US5249998, US20050255764A1), поэтому стартовать с помощью пампинга невозможно, необходимо предварительно разгонять борд. Кроме того, поддержание необходимой скорости на таком спортивном снаряде требует серьезных усилий, и человек, приседая, быстро устает. Устранить описанные проблемы может использование двух подводных крыльев с автостабильным профилем, шарнирно связанных с передней и задней стойками борда (фиг. 11). Тогда перенося вес с передней стойки на заднюю, либо стоя, либо сидя, как показано на фиг. 11, спортсмен может попеременно поднимать и опускать крылья, автоматически выставляющиеся на оптимальный угол атаки, и длительно поддерживать необходимую для движения на крыльях скорость.
Тот же принцип попеременного поднимания и опускания по меньшей мере одного шарнирно закрепленного крыла может способствовать совместному получению подъемной силы и тяги для любых плавательных средств с подводным крылом (гидрофойлом), в том числе и с моторным приводом.



Изобретение относится к лопастным движителям в текучей среде, в том числе с колеблющимися лопастями, и направлено на обеспечение самоустановки лопастей на оптимальный угол атаки. Движитель аппарата в текучей среде содержит по меньшей мере одну шарнирно связанную с приводом лопасть, оснащенную дополнительным крыловидным элементом, жестко связанным с самой лопастью. Шарнир крепления лопасти позволяет ей свободно вращаться, а ось вращения находится между полученными по линейной теории точкой приложения равнодействующей гидродинамических сил или центром давления лопасти без оперения и центром давления этой же лопасти с дополнительным крыловидным элементом. Достигается повышение подъемной силы и тяги для плавательных средств с подводным крылом. 1 з.п. ф-лы, 11 ил.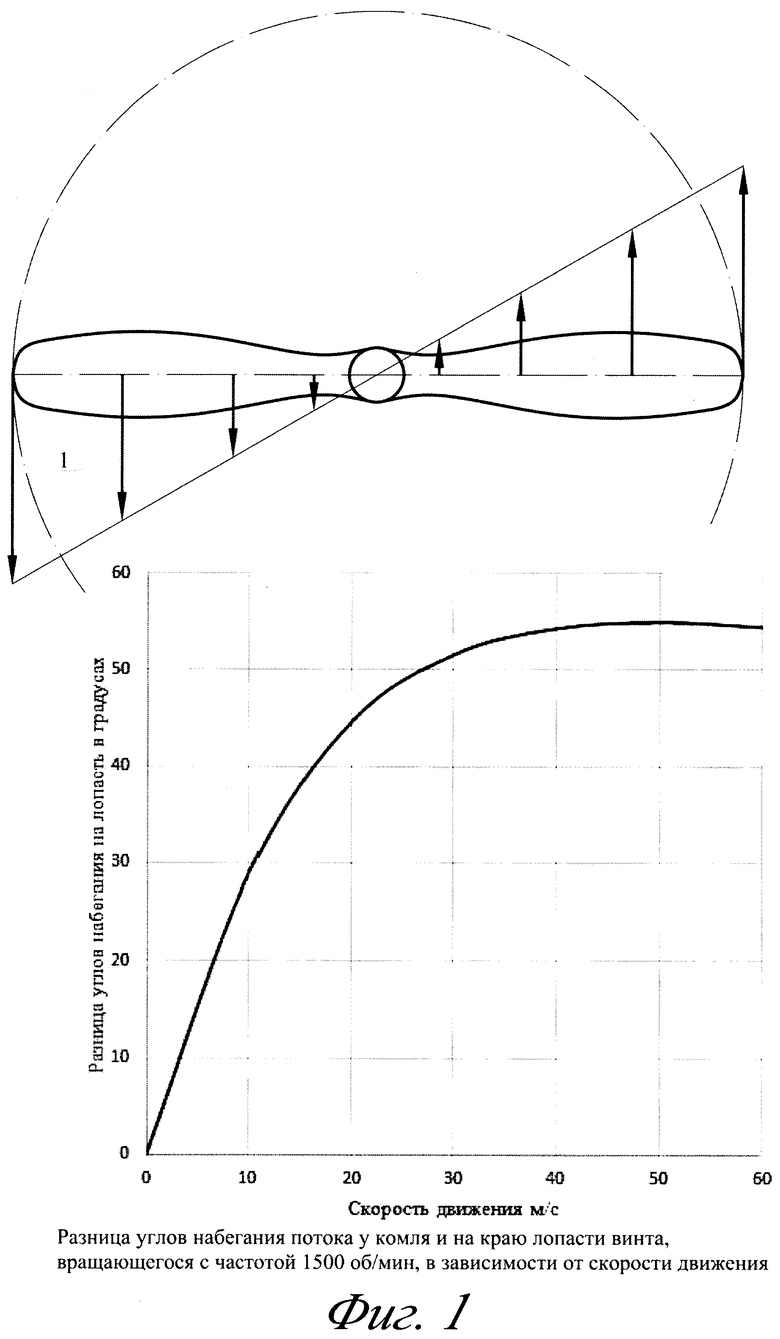
1. Движитель аппарата в текучей среде, содержащий по меньшей мере одну шарнирно связанную с приводом лопасть, оснащенную дополнительным крыловидным элементом, жестко связанным с самой лопастью, отличающийся тем, что шарнир крепления лопасти позволяет ей свободно вращаться, а ось вращения находится между полученными по линейной теории точкой приложения равнодействующей гидродинамических сил или центром давления лопасти без оперения и центром давления этой же лопасти с дополнительным крыловидным элементом.
2. Движитель аппарата в текучей среде лопастного колебательного типа, содержащий по меньшей мере одну шарнирно связанную с приводными балками лопасть, по п.1, отличающийся тем, что ось лопасти соединена с приводными балками через водила, а на приводных балках выполнены направляющие, захватывающие носик лопасти при смене направления колебания.
| Гребной винт изменяемого шага | 1960 |
|
SU146201A1 |
| Водометный движитель | 1977 |
|
SU707514A3 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |
| US 5536190 A1, 16.07.1996 | |||
| US 4944703 A1, 31.07.1990. | |||
