Изобретение относится к приводимому в действие текучей средой сервоприводу трубопроводной арматуры, в частности, запорной, предохранительной или регулирующей арматуры.
Известны различные сервоприводы трубопроводной арматуры. Наряду с широко применяемыми электрическими сервоприводами трубопроводной арматуры, известны также сервоприводы трубопроводной арматуры, приводимые в действие текучей средой (см. например, ЕР 0665381 В1, ЕР 1418343 В1, ЕР 1593893 В1 и ЕР 2101061 А1). Обычно сервоприводы арматуры такого типа содержат линейный исполнительный орган, ползун которого непосредственно или косвенно соединен со входом арматуры, и базовый модуль с пневматической/гидравлической системой управления, обычно включающий электропневматический/гидравлический преобразователь сигналов, который расположен перед пневматической/гидравлической системой управления и может взаимодействовать с ней, а также может иметь пропорциональную выходную характеристику. К сигнальному входу, соединенному с электропневматическим/гидравлическим преобразователем сигналов или соответствующему ему, кроме того обычно подключен внешний электрический регулирующий модуль, который может включать в себя средства ввода, вход заданного значения, регулирующую электронику, модуль связи, сигнальный выход и/или датчик сигналов. Поскольку регулирующий контур замкнут, сигнал фактического значения с измерительного преобразователя, присоединенного к арматуре, возвращается в электрический регулирующий модуль.
В ЕР 884481 А2 описан пневматический регулятор положения для пневматического сервопривода, управляющее воздействие которого дополнительно регулируется устанавливаемым заданным значением, в частности, для позиционирования регулирующих клапанов, приводимых в действие мембранами и поршнями, пропорционально пневматическому входному сигналу. Чтобы избежать потерь давления, регулятор положения снабжен тремя основными компонентами, а именно, устройством сравнения управляющего воздействия с заданным значением, вырабатывающее разностную величину, первым клапаном, который расположен в проточном канале от пневматического источника давления к сервоприводу, в исходном состоянии закрыт и может управляться разностной величиной, и вторым клапаном, который расположен в проточном канале от выпускного отверстия сервопривода к устройству снижения давления, в исходном состоянии закрыт и может управляться разностной величиной. Регулирующий контур регулятора положения содержит пневматический сервопривод с исполнительным элементом в форме управляющей штанги, которая связывает управляющее воздействие с элементом, определяющим протекание через клапан, задвижку и т.п. Сервопривод содержит нагружаемую давлением мембрану, с которой соединен исполнительный элемент. Возвратно-поступательное движение исполнительного элемента через передачу, предпочтительно через кулачковый механизм со сменными кулачками, передается на один конец пружины сжатия, другой конец которой воздействует на одно плечо двуплечего рычага, установленный с возможностью поворота. Преобразователь давление/сила посредством мембраны, нагружаемой давлением, соответствующим заданному значению, нажимает на то же плечо рычага, что и пружина сжатия, но в противоположном направлении. Сила, действующая на плечо рычага от пружины сжатия, сравнивается в измерительном устройстве регулирующего контура с противоположной силой, приложенной от мембраны, в результате чего между этими силами устанавливается равновесие. Таким образом, преобразователь давление/сила образует вместе с пружиной сжатия устройство сравнения заданного и фактического значений. В этом устройстве сравнения пружина сжатия вместе с расположенным перед ней кулачковым механизмом образует преобразователь перемещение/сила, который преобразует ход исполнительного элемента в силу, соответствующую фактическому значению.
В DE 3819122 С2 описан способ регулирования положения регулирующих клапанов при помощи регулируемых сервоприводов, приводимых в действие текучей средой или электродвигателем. Согласно способу, в предшествующем испытании определяют отклонение между фактическим и идеальным соответствием задающей величины и регулируемой величины регулирующего клапана в зависимости от направления движения, и полученное на основе этого отклонения корректирующее значение подают в устройство сравнения задающей величины и регулируемой величины на регулирующем устройстве. Подача корректирующего значения осуществляется в виде изменения подаваемых на устройство сравнения сигналов задающей величины и/или регулируемой величины. При этом корректирующее значение подают на регулирующее устройство таким образом, что компенсируется отклонение соответствия задающей величины и регулируемой величины, обусловленное гистерезисом системы, состоящей из регулирующего клапана с регулируемым сервоприводом.
Задачей изобретения является создание приводимого в действие текучей средой сервопривода трубопроводной арматуры, который имеет особенно выгодную характеристику регулирования, в частности позволяет особенно быстро и эффективно сводить к нулю возмущающие воздействия, которым подвергается система.
Эта задача решена посредством приводимого в действие текучей средой сервопривода трубопроводной арматуры, описанного в п.1 формулы изобретения. Согласно изобретению, приводимый в действие текучей средой сервопривод трубопроводной арматуры отличается, в частности, тем, что между сигнальным входом и по меньшей мере одним линейным исполнительным органом функционально расположен по меньшей мере один пневматический/гидравлический внутренний регулирующий контур, предпочтительно после электропневматического/гидравлического преобразователя сигналов. Другими словами, в сервоприводе трубопроводной арматуры согласно изобретению в области между электропневматическим/ гидравлическим преобразователем сигналов и линейным исполнительным органом находится не цепь управления, а в эту область системы интегрирован или внедрен по меньшей мере один пневматический/гидравлический внутренний регулирующий контур. Благодаря этому получается многоступенчатое, то есть, осуществляемое на нескольких уровнях регулирование арматуры, конкретно посредством того, что внутри традиционного регулирующего контура, управляемого электрическим регулирующим модулем, на следующем уровне предусмотрен второй внутренний регулирующий контур, действующий только пневматически/гидравлически. Таким образом неожиданно достигаются явные преимущества в отношении характеристики регулирования с разных точек зрения. Во-первых, выгодно то, что дополнительный пневматический/гидравлический внутренний регулирующий контур функционально и системно может быть расположен вблизи арматуры, так что возмущающие воздействия могут быть сведены к нулю особенно эффективно. Кроме того, предусмотренное согласно настоящему изобретению пневматическое/гидравлическое регулирование при помощи пневматического/гидравлического внутреннего регулирующего контура, расположенного, в частности, после электропневматического/гидравлического преобразователя сигналов, системно превосходит электрическое регулирование в отношении динамики регулирования. В результате сервопривод трубопроводной арматуры, приводимый в действие текучей средой, согласно изобретению существенно превосходит известные сервоприводы по характеристике регулирования.
Согласно первому предпочтительному усовершенствованию пневматический/гидравлический внутренний регулирующий контур выполнен в виде вспомогательного контура регулирования положения. При таком усовершенствовании сервопривода согласно изобретению положение ползуна по меньшей мере одного линейного исполнительного органа дополнительно регулируется с помощью пневматического/гидравлического внутреннего регулирующего контура. Указанное выше преимущество непосредственного прямого дополнительного регулирования линейного исполнительного органа в ответ на возможные возмущающие воздействия проявляется в этом случае особенно явно. Реализованный таким образом саморегулирующийся привод существенно упрощает регулирование положения арматуры, при этом исключаются зависящие от привода различия во времени реакции и времени запаздывания.
Следующее предпочтительное усовершенствование изобретения отличается тем, что электропневматический/гидравлический преобразователь сигналов выполнен с замкнутым регулирующим контуром, предпочтительно контуром регулирования давления или объемного потока, в качестве вспомогательного регулирующего контура. Это дает преимуществом, в частности, в таких сервоприводах арматуры согласно изобретению, в которых снабжение текучей средой под давлением осуществляется не децентрализовано, то есть, вблизи арматуры, а централизованно.
В этой связи согласно другому предпочтительному усовершенствованию изобретения оказалось выгодным использовать пневматическую вспомогательную энергию, а в качестве электропневматического/гидравлического преобразователя сигналов использовать преобразователь ток/давление. Преобразователь ток/давление предпочтительно имеет внутренний датчик давления и внутренний контур регулирования давления. Вместо управляемой передачи сигналов здесь имеется замкнутый электрический контур регулирования давления с саморегулирующимся задатчиком давления. Достигаемая таким образом улучшенная характеристика регулирования обеспечивает оптимизированные управление и качество процесса. Также выгодно, что если преобразователь ток/давление эксплуатируется посредством особенно эффективной энергетически и высокодинамичной технологии пьезоэлектрических клапанов и/или в отрегулированном состоянии не имеет собственного потребления воздуха, сигнал датчика давления передается для внешней обработки в электрический регулирующий модуль, и/или пневматическая схема соединений между приводом и преобразователем ток/давление соответствует документу VDI/VDE 3845 для приводов одностороннего действия. Согласно другому предпочтительному усовершенствованию изобретения, в частности, при применении сжимаемой текучей среды в пневматических приводах, предусмотрено, что по меньшей мере один линейный исполнительный орган выполнен в виде исполнительного органа с двухсторонней подачей текучей среды, при этом обе рабочие полости постоянно соединены с устройством снабжения текучей средой под давлением. Если обе рабочие полости линейного исполнительного органа с двухсторонней подачей текучей среды непосредственно соединены с устройством снабжения текучей средой под давлением, или питаются от него, и, с целью позиционирования, то есть, для изменения положения ползуна линейного исполнительного органа, из одной рабочей полости целенаправленно удаляется воздух, то ползун линейного исполнительного органа в любом рабочем положении зажимается с максимальной жесткостью, что обеспечивает особенно хорошую возможность регулирования. Кроме того, при такой конструкции можно обеспечить, чтобы окружающий воздух никогда не всасывался в линейный исполнительный орган, вследствие чего исключается проникновение загрязнений в систему и повышается долговечность. Следующее преимущество этого усовершенствования состоит в получении экономичной и очень легко управляемой конструкции благодаря тому, что линейный исполнительный орган двойного действия можно регулировать при помощи единственного электропневматического/гидравлического преобразователя сигналов. Все указанные преимущества имеют особую практическую важность в случае пневматических сервоприводов трубопроводной арматуры согласно изобретению.
В одном усовершенствовании сервопривода согласно изобретению пневматический/гидравлический внутренний регулирующий контур может содержать включенную перед линейным исполнительным органом регулирующую группу с двумя подвижными друг относительно друга конструктивными элементами, открывающими или закрывающими управляющие отверстия, причем первый конструктивный соединен с контрольным цилиндром, в который подается управляющее давление, а второй конструктивный элемент соединен с ползуном линейного исполнительного органа. Это особенно выгодно при выполнении линейного исполнительного органа в виде линейного исполнительного органа двойного действия, при этом указанная регулирующая группа предпочтительно сообщается через соответствующий выпускной трубопровод с обеими рабочими полостями, постоянно соединенными с устройством снабжения текучей средой под давлением. Особенно выгодное конструктивное усовершенствование состоит в том, что регулирующая группа содержит два выпускных клапана, каждый из которых включает седло, установленное в корпусе с возможностью перемещения в направлении против предварительного прижатия.
Согласно другому предпочтительному усовершенствованию изобретения, сервопривод трубопроводной арматуры содержит два расположенных друг против друга линейных исполнительных органа и расположенный между ними механический преобразователь, соединяющий друг с другом их ползуны. Механический преобразователь может преобразовывать линейное движение ползунов обоих линейных исполнительных органов во вращательное движение, если арматура содержит поворотный запорный элемент, положение которого изменяется сервоприводом трубопроводной арматуры. Особенно предпочтительно, чтобы сервопривод был выполнен в виде компактной замкнутой пневматической/гидравлической приводной системы, имеющей лишь электрический вход и воздействующее на вход арматуры механическое выходное звено и построенной по модульному принципу из отдельных объединенных с образованием функционального узла компонентов в виде базового модуля, двух линейных исполнительных органов и механического преобразователя. Объединение указанных компонентов в компактную замкнутую пневматическую/гидравлическую приводную систему может быть реализовано посредством того, что оба линейных исполнительных органа прифланцованы к механическому преобразователю, который, в свою очередь, посредством фланцевого соединения соединен с базовым модулем. Это обеспечивает возможность того, что согласно другому предпочтительному усовершенствованию все пневматические/гидравлические соединения между базовым модулем и исполнительными органами, а также, при необходимости, механическим преобразователем, проходят внутри соответствующих компонентов, так что отсутствуют какие-либо открытые трубопроводы для текучей среды. Указанные пневматические/гидравлические соединения в области тех разделительных плоскостей между компонентами, через которые они проходят, могут быть оснащены самозакрывающимися затворами, которые предотвращают выход текучей среды или непреднамеренное попадание загрязнений через разделительные плоскости, в частности, если отдельные компоненты демонтированы с целью технического обслуживания. В области затворов могут быть предусмотрены дополнительные фильтровальные элементы для текучей среды, в частности, интегрированные в них или соответственно соединенные с ними с образованием одного конструктивного узла. Все указанные выше конструктивные усовершенствования сервопривода оказались особенно выгодны в случае гидравлических сервоприводов. В частности, сервопривод трубопроводной арматуры, приводимый в действие текучей средой, в отношении технического обслуживания и содержания в исправном состоянии полностью идентичен электрическому сервоприводу трубопроводной арматуры, и при этом имеет специфические преимущества, связанные с его приведением в действие текучей средой, а именно, является компактным, обладает энергетической эффективностью и надежностью, а также прост в реализации при наличии высокодинамичных защитных функций, причем последнее возможно благодаря аккумулированию энергии текучей среды.
Как сказано выше, согласно изобретению, снабжение текучей средой под давлением может быть организовано как централизованно, то есть для нескольких сервоприводов, так и децентрализованно, то есть только для одного сервопривода. В последнем случае особенно предпочтительно, чтобы базовый модуль приводимого в действие текучей средой сервопривода трубопроводной арматуры содержал модуль снабжения текучей средой под давлением. В случае гидравлического сервопривода трубопроводной арматуры согласно изобретению особенно предпочтительно, чтобы модуль снабжения текучей средой под давлением включал в себя питаемый из бака гидравлический агрегат, содержащий насос, работающий от электродвигателя. В пневматическом сервоприводе трубопроводной арматуры согласно изобретению модуль снабжения текучей средой под давлением включает в себя работающий от электродвигателя пневматический насос, всасывающий окружающий воздух, предпочтительно через фильтровальную систему. Если сервопривод выполнен в виде гидравлического сервопривода, то согласно другому предпочтительному усовершенствованию он может содержать заправочный соединительный элемент, предназначенный для первичного заполнения гидравлической системы гидравлической жидкостью из картриджа, расположенный, в частности, на базовом модуле. Это дает возможность запускать гидравлический сервопривод в эксплуатацию без какого-либо контакта пользователя с гидравлической жидкостью, что позволяет использовать гидравлические сервоприводы арматуры, превосходящие по своим рабочим характеристикам электрические сервоприводы (см. выше), также и в таких областях применения, где придается особое значение чистоте и минимальному риску контакта пользователя с гидравлической жидкостью.
Для высокой защищенности системы от отказов, можно не только аккумулировать энергию текучей среды в аккумуляторе давления (в частности, внешнем), как описано выше, чтобы в случае отказа устройства снабжения текучей средой под давлением еще можно было бы по меньшей мере перевести арматуру в заданное безопасное положение. Помимо этого, при необходимости, по меньшей мере в один линейный исполнительный орган может быть дополнительно интегрирована механическая аккумулирующая пружина. При этом особенно предпочтительно, чтобы эта механическая аккумулирующая пружина была предварительно нагружена давлением текучей среды и застопорена в предварительно нагруженном состоянии, так что она постоянно воздействует на ползун линейного исполнительного органа не в том смысле, что постоянно должна производиться работа против силы механической аккумулирующей пружины. В этом случае механическая аккумулирующая пружина воздействует на ползун соответствующего линейного исполнительного органа лишь после снятия блокировки, стопорящей эту пружину. Благодаря механической аккумулирующей пружине, застопоренной в нормальном режиме работы и освобождаемой путем снятия блокировки лишь в аварийном случае, надежность сервопривода сочетается с такими качествами, как экономичность, компактность, а также динамика регулирования.
Другие усовершенствования настоящего изобретения описаны в зависимых пунктах формулы или вытекают из последующего описания предпочтительных вариантов осуществления изобретения.
На чертежах:
фиг.1 схематично изображает гидравлический сервопривод трубопроводной арматуры согласно изобретению,
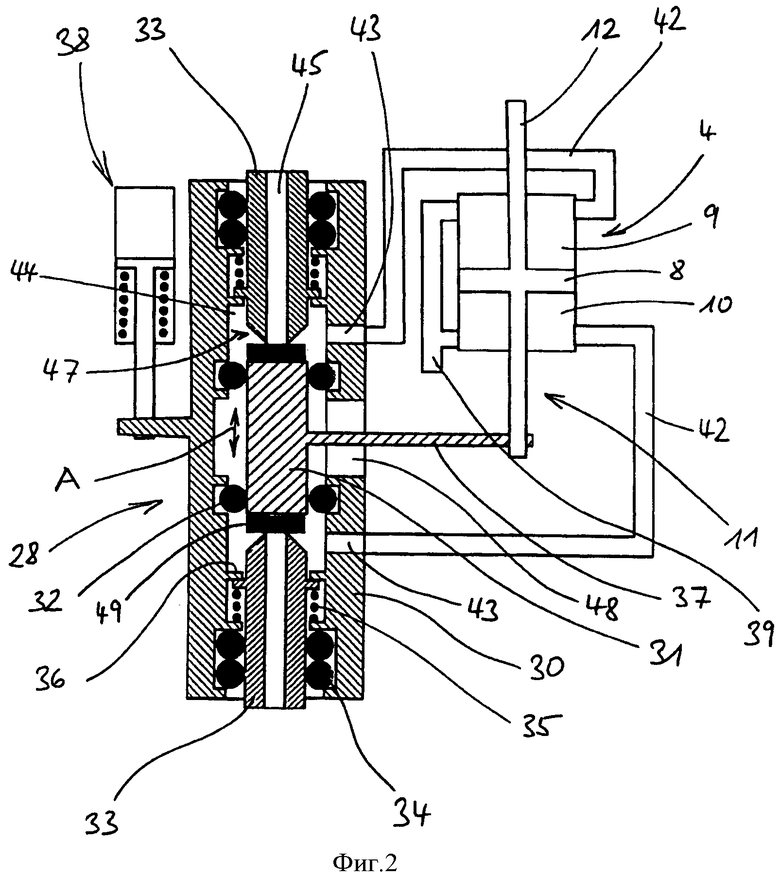
фиг.2 изображает конструктивное выполнение саморегулирующегося позиционного привода, реализованного в сервоприводе согласно фиг.1,
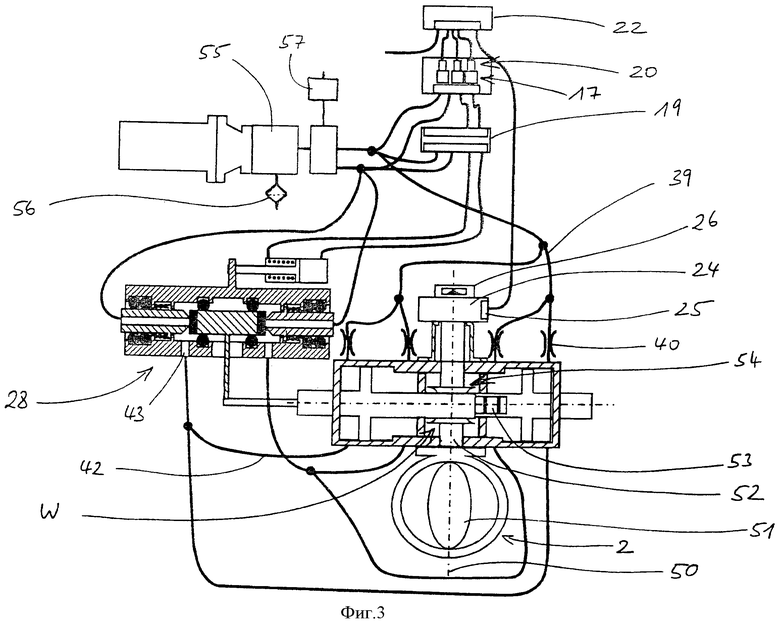
фиг.3 схематично изображает пневматический сервопривод трубопроводной арматуры согласно изобретению и
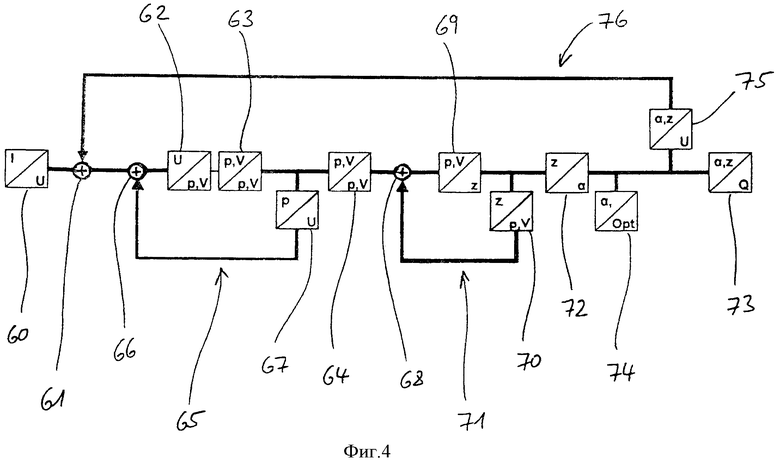
фиг.4 изображает схему регулирования сервопривода, показанного на фиг.1 и 3, согласно изобретению.
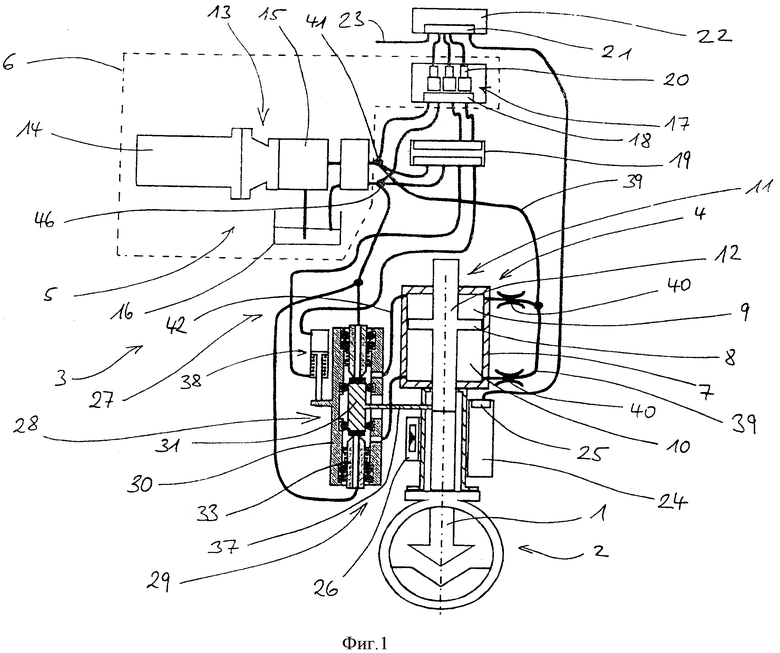
Согласно фиг.1, к известной запорной арматуре 2, включающей в себя задвижку 1, установленную с возможностью линейного перемещения, присоединен гидравлический сервопривод 3 трубопроводной арматуры. Основными компонентами сервопривода являются линейный исполнительный орган 4, модуль 5 снабжения текучей средой под давлением и базовый модуль 6, содержащий пневматическую/гидравлическую систему управления. Линейный исполнительный орган 4 выполнен в виде гидравлического цилиндра двойного действия, содержащего поршень 8, установленный подвижно в цилиндре 7 и отделяющий друг от друга две загружаемые в противоположных направлениях рабочие полости 9 и 10. Поршень 8 соединен с ползуном 11 в виде поршневого штока 12, который воздействует непосредственно на задвижку 1 запорной арматуры 2.
Модуль 5 снабжения текучей средой под давлением содержит гидравлический агрегат 13, содержащий работающий от электродвигателя 14 гидравлический насос 15 и бак 16 для гидравлической жидкости. Кроме того, базовый модуль 6 содержит клапаны 17 с предварительным пневматическим/гидравлическим управлением и пневматический/гидравлический интерфейс 18, через который базовый модуль соединяется с последующим пневматическим/гидравлическим преобразователем 19. Клапаны 17 с предварительным пневматическим/гидравлическим управлением базового модуля 6 управляются через соответствующие сигнальные входы при помощи электропневматического/гидравлического преобразователя сигналов в виде контрольных клапанов 20, на которые воздействует электрический регулирующий модуль 22, снабженный интерфейсом 21 связи. Через интерфейс 21 связи к регулирующему модулю 22 подключен вход 23 заданного значения, соединенный с задатчиком (не показан).
К задвижке 1 запорной арматуры 2 присоединен датчик 24 положения, который через интерфейс 25 связи соединен с регулирующим модулем 22 и возвращает в регулирующий модуль 22 сигнал, соответствующий фактическому положению задвижки 1. Предусмотрен также оптический индикатор 26 положения.
В объеме предшествующего описания сервопривод согласно фиг.1 соответствует достаточно известному и широко применяемому сервоприводу и потому не нуждается в дальнейшем пояснении. Принципиальное отличие сервопривода 3 трубопроводной арматуры согласно фиг.1 по сравнению с известными сервоприводами состоит в том, что регулирующий модуль 22 не воздействует непосредственно на линейный исполнительный орган 4, а между сигнальным входом базового модуля 6 и линейным исполнительным органом 4 функционально установлен пневматический/гидравлический внутренний регулирующий контур 27, расположенный после электропневматического/гидравлического преобразователя сигналов. Таким образом, пневматический/гидравлический преобразователь 19 соединен гидравлически с соединительными элементами линейного исполнительного органа 4 не непосредственно, а при помощи чисто гидравлической регулирующей группы 29, включающей в себя саморегулирующийся позиционный привод 28.
Саморегулирующийся позиционный привод 28 (см. фиг.2) содержит корпус 30 и установленный в нем подвижно (см. двойную стрелку А) ползун
31, который уплотнен относительно корпуса 30 уплотнительными кольцами
32. Кроме того, в корпусе 30 находятся две сопловые вставки 33, которые могут перемещаться в нем параллельно направлению А движения ползуна 31 и уплотнены относительно корпуса уплотнительными кольцами 34. Кроме того, при помощи пружин 35 они предварительно прижаты к упору 36. В показанном на фиг.3 нейтральном положении саморегулирующегося позиционного привода 28 обе сопловые вставки герметично прилегают к уплотнительным элементам 49, установленных с торцевой стороны на ползуне 31 таким образом, что управляющие отверстия сопловых вставок 33 закрыты этими уплотнительными элементами 49.
Ползун 31 саморегулирующегося позиционного привода 28 через соединительный шток 37, который через окно 48 проходит насквозь через корпус 30, соединен с ползуном 11 линейного исполнительного органа 4, так что непосредственно следует за его движением. Корпус 30 саморегулирующегося позиционного привода 28 установлен подвижно и его положение предварительно задается контрольным цилиндром 38 двойного действия. Контрольный цилиндр 38 управляется через базовый модуль 6 и пневматический/гидравлический преобразователь 19 от регулирующего модуля 22; последний таким образом предварительно задает при помощи контрольного цилиндра 38 положение корпуса 30 саморегулирующегося позиционного привода 28.
Обе рабочие полости 9 и 10 линейного исполнительного органа 4 через трубопроводы 39 высокого давления с дросселями 40 потока постоянно подключены к стороне 41 высокого давления модуля 5 снабжения текучей средой под давлением, то есть, постоянно нагружены его давлением. Кроме того, каждая рабочая полость 9 и 10 линейного исполнительного органа соединена с соответствующим входом 43 в корпусе 30 саморегулирующегося позиционного привода 28 через соответствующий выпускной трубопровод 42. Таким образом, в отрегулированном состоянии в обеих полостях 44 давления саморегулирующегося позиционного привода 28 имеют место такие же соотношения давления, как в рабочих полостях 9 и 10 линейного исполнительного органа 4.
Если посредством задаваемого регулирующим модулем 22 нагружения контрольного цилиндра 38 при помощи базового модуля 6 и пневматического/гидравлического преобразователя 19 корпус 30 саморегулирующегося позиционного привода 28 перемещается в направлении подъема задвижки 1 вверх, то верхняя из двух полостей 44 давления через отверстие 45 соответствующей сопловой вставки 33 соединяется со стороной 46 низкого давления модуля 5 снабжения текучей средой под давлением. Давление в верхней рабочей полости 9 линейного исполнительного органа 4 падает ниже давления, имеющегося в нижней рабочей полости 10, так что в результате следящего регулирования ползун 11 линейного исполнительного органа 4 поднимается до тех пор, пока соединенная с ползуном 11 задвижка не достигнет положения, в котором соединенный с ней ползун 31 саморегулирующегося позиционного привода 28 не закроет снова обе сопловые вставки 33. В соответствии с этим регулирующая группа 29 имеет два выпускных клапана 47, каждый из которых включает в себя седло, установленное в корпусе 30 с возможностью перемещения в направлении против предварительного прижатия.
В показанной системе действующая на запорную задвижку 1 возмущающая величина доводится до нуля непосредственно внутри чисто гидравлического регулирующего контура саморегулирующегося позиционного привода 28, так что в этом отношении регулирующее воздействие регулирующего модуля 22 отсутствует. Благодаря этому характеристика регулирования регулирующего модуля 22 является согласованной.
На фиг.3 показан вариант выполнения, по существу сравнимый в отношении функционирования с вариантом выполнения согласно фиг.1, но имеющий следующие отличия от этого варианта.
Так, запорная арматура 2 вместо запорной задвижки содержит запорный элемент 51, который может поворачиваться вокруг оси 50 и жестко соединен с валом 52. Далее, в варианте согласно фиг.3 используются два линейных исполнительных органа 4 двойного действия с противоположными ходами. Они попарно противоположно присоединены костальным компонентам пневматической системы. Кроме того, линейное движение обоих линейных исполнительных органов преобразуется в механическом преобразователе W во вращение в результате того, что ползуны линейных исполнительных органов воздействуют через зубчатые рейки 53 на зубчатое колесо 54, жестко закрепленное на валу 52.
Кроме того, сервопривод трубопроводной арматуры работает пневматически. Соответственно, модуль 5 снабжения текучей средой под давлением вместо гидравлического насоса имеет воздушный компрессор 55 для всасывания окружающего воздуха через фильтр 56. Пневматическая текучая среда выпускается на стороне низкого давления в окружающую среду и для этого предусмотрен глушитель 57.
В остальном вариант выполнения согласно фиг.3 и его функционирование должны быть полностью понятны специалисту из предыдущего описания фиг.1 и 2, так что во избежание повторения дальнейшее описание фиг.3 не приводится.
Согласно схеме регулирования, показанной на фиг.4, входной сигнал поступает через вход 60 связи в регулятор 61 положения (ср. регулирующий модуль 22), который, как показано на фиг.1 и 3, может непосредственно воздействовать на регулятор 62 текучей среды (ср. контрольные клапаны 20), воздействующий на пневматический/гидравлический преобразователь 63 (ср. клапаны 17 с предварительным гидравлическим управлением), который в свою очередь воздействует на следующий пневматический/гидравлический преобразователь 64 (ср. пневматический/гидравлический преобразователь 19). Однако между регулятором 61 положения и следующим пневматическим/гидравлическим преобразователем 64, как в общем поясняется в описании, может быть также интегрирован вспомогательный контур 65 регулирования давления с саморегулирующимся задатчиком давления, содержащий регулятор 66 давления, на который возвращается сигнал датчика 67 давления. Выход следующего пневматического/гидравлического преобразователя 64 воздействует на регулятор 68 положения (ср. регулирующая группа 29), который в сочетании с линейным приводом 69 (ср. линейный исполнительный орган 4) и датчиком 70 расстояния (ср. соединительный шток 37) образует вспомогательный контур 71 регулирования положения, включающий в себя саморегулирующийся позиционный привод. В варианте выполнения согласно фиг.3 линейный привод 69 воздействует на вращательный преобразователь 72 (ср. механический преобразователь W), выход которого воздействует на арматуру 73 (ср. запорная арматура 2). Положение вращательного преобразователя 72 может визуально отображаться на индикаторе 74 положения (ср. индикатор 26 положения). Кроме того, посредством датчика 75 положения (ср. датчик 24 положения) может формироваться сигнал, соответствующий фактическому положению линейного привода (вариант выполнения согласно фиг.1) или вращательного преобразователя (вариант выполнения согласно фиг.3), и, с целью образования регулирующего контура 76 для положения арматуры, возвращаться в регулятор 61 положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2551468C2 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2765399C2 |
| ОТКАЗОУСТОЙЧИВЫЙ ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2765400C2 |
| РЕГУЛИРУЮЩИЙ КЛАПАН | 2012 |
|
RU2495310C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБХОДА УСТАНОВОЧНОГО УСТРОЙСТВА В АКТИВНОМ КОНТУРЕ УПРАВЛЕНИЯ | 2011 |
|
RU2588341C2 |
| Электрогенерирующий комплекс "СКАТ" | 2015 |
|
RU2609273C2 |
| ПОЗИЦИОНЕР КЛАПАНА С ВОЗМОЖНОСТЬЮ ЗАЩИТЫ ОТ ИЗБЫТОЧНОГО ДАВЛЕНИЯ | 2015 |
|
RU2668504C2 |
| СПОСОБ И УСТРОЙСТВО С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2005 |
|
RU2393369C2 |
| РЕГУЛИРУЮЩИЙ КЛАПАН | 2012 |
|
RU2495308C1 |
| СБОРОЧНЫЙ УЗЕЛ ГИДРАВЛИЧЕСКОГО РЕГУЛИРУЮЩЕГО КЛАПАНА И ПРИВОДА КЛАПАНА | 2014 |
|
RU2682431C2 |
Сервопривод трубопроводной арматуры, приводимый в действие текучей средой, содержит базовый модуль (6), включающий электропневматический/гидравлический преобразователь сигналов и пневматическую/гидравлическую систему управления, и по меньшей мере один приводимый в действие с помощью пневматического/гидравлического управления линейный исполнительный орган (4), ползун (11) которого непосредственно или косвенно соединен с входом арматуры. К входу сигналов базового модуля подключен регулирующий модуль (22), сигнальный выход которого соединен с электропневматическим/гидравлическим преобразователем сигналов и в который возвращается сигнал фактического значения измерительного преобразователя (24), присоединенного к арматуре. Между сигнальным входом и по меньшей мере одним линейным исполнительным органом функционально установлен пневматический/гидравлический внутренний регулирующий контур (27), предпочтительно после электропневматического/гидравлического преобразователя сигналов. Технический результат - повышение надежности. 17 з.п. ф-лы, 4 ил.
1. Приводимый в действие текучей средой сервопривод трубопроводной арматуры, в частности запорной арматуры (2), предохранительной или регулирующей арматуры, содержащий
базовый модуль (6), имеющий пневматическое/гидравлическое управление, перед которым установлен электропневматический/гидравлический преобразователь сигналов, предпочтительно с пропорциональной выходной характеристикой,
и по меньшей мере один приводимый в действие с помощью пневматического/гидравлического управления линейный исполнительный орган (4), ползун (11) которого непосредственно или косвенно соединен со входом арматуры,
при этом базовый модуль имеет сигнальный вход, который соединен с электропневматическим/гидравлическим преобразователем сигналов и тем самым с пневматическим/гидравлическим управлением и к которому подключен внешний электрический регулирующий модуль (22), который содержит внешние средства ввода, вход заданного значения, регулирующую электронику, предпочтительно с модулем связи, сигнальный выход, соединенный с электропневматическим/гидравлическим преобразователем сигналов, и датчик сигналов и в который возвращается сигнал фактического значения первичного измерительного преобразователя (24), соединенного с арматурой,
а между сигнальным входом и по меньшей мере одним линейным исполнительным органом функционально установлен пневматический/гидравлический внутренний регулирующий контур (27; 65; 71), расположенный предпочтительно после электропневматического/ гидравлического преобразователя сигналов.
2. Сервопривод по п.1, отличающийся тем, что пневматический/гидравлический внутренний регулирующий контур выполнен в виде вспомогательного контура (27; 71) регулирования положения.
3. Сервопривод по п.1 или 2, отличающийся тем, что электропневматический/гидравлический преобразователь сигналов выполнен с замкнутым регулирующим контуром, предпочтительно контуром (65) регулирования давления или объемного потока, в виде вспомогательного регулирующего контура.
4. Сервопривод по п.1 или 2, отличающийся тем, что по меньшей мере один линейный исполнительный орган (4) выполнен в виде исполнительного органа с двухсторонней подачей текучей среды, при этом обе рабочие полости (9, 10) постоянно соединены с устройством снабжения давлением.
5. Сервопривод по п.1, отличающийся тем, что пневматический/гидравлический внутренний регулирующий контур (27; 71) содержит включенную перед линейным исполнительным органом (4) регулирующую группу (29) с двумя подвижными относительно друг друга конструктивными элементами, открывающими или закрывающими управляющие отверстия, причем первый конструктивный элемент соединен с контрольным цилиндром (38), в который подается управляющее давление, а второй конструктивный элемент соединен с ползуном (11) линейного исполнительного органа (4).
6. Сервопривод по п.5, отличающийся тем, что регулирующая группа (29) сообщается с каждой рабочей полостью (9, 10) через соответствующий выпускной трубопровод (42).
7. Сервопривод по п.5 или 6, отличающийся тем, что регулирующая группа (29) содержит два выпускных клапана (47), каждый из которых включает седло, установленное в корпусе (30) с возможностью перемещения в направлении против предварительного прижатия.
8. Сервопривод по п.1 или 2, отличающийся тем, что он содержит два расположенных друг против друга линейных исполнительных органа (4) и расположенный между ними механический преобразователь (W), соединяющий их ползуны друг с другом.
9. Сервопривод по п.1 или 2, отличающийся тем, что он содержит средство (26) индикации, концевые выключатели, концевые упоры, демпферы конечного положения, средства ручного управления и/или датчики (24) положения.
10. Сервопривод по п.1 или 2, отличающийся тем, что базовый модуль (6) содержит модуль (5) снабжения текучей средой под давлением.
11. Сервопривод по п.10, отличающийся тем, что модуль (5) снабжения текучей средой под давлением содержит питаемый из бака (16) гидравлический агрегат (13), включающий работающий от электродвигателя (14) насос (15).
12. Сервопривод по п.1 или 2, отличающийся тем, что он содержит заправочный соединительный элемент, предназначенный для первичного заполнения пневматической/гидравлической системы гидравлической жидкостью из картриджа и установленный, в частности, на базовом модуле (6).
13. Сервопривод по п.10, отличающийся тем, что модуль снабжения текучей средой под давлением содержит работающий от электродвигателя (14) пневматический компрессор (55), всасывающий окружающую среду предпочтительно через фильтровальную систему (56).
14. Сервопривод по п.1, отличающийся тем, что используется пневматическая вспомогательная энергия, а в качестве электропневматического/гидравлического преобразователя (20) сигналов используется преобразователь ток/давление.
15. Сервопривод по п.14, отличающийся тем, что преобразователь ток/давление снабжен внутренним датчиком (67) давления и внутренним контуром (65) регулирования давления.
16. Сервопривод по п.13 или 14, отличающийся тем, что преобразователь ток/давление управляется посредством особенно энергетически эффективной и высокодинамичной технологии пьезоэлектрических клапанов.
17. Сервопривод по п.15, отличающийся тем, что преобразователь ток/давление в отрегулированном состоянии не имеет собственного потребления воздуха.
18. Сервопривод по п.14 или 15, отличающийся тем, что сигнал датчика давления передается для внешней обработки в электрический регулирующий модуль.
| Покрытие гладильной подушки | 1980 |
|
SU922210A2 |
| DE 19540441 A1, 30.04.1997 | |||
| EP 0884481 A2, 16.12.1998 | |||
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, СТРУЙНЫЙ ДВИГАТЕЛЬ, УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ, БЛОК ПЕРЕКЛЮЧАТЕЛЕЙ | 2005 |
|
RU2288376C1 |
| Привод запорной арматуры | 1979 |
|
SU832219A1 |

