ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет предварительной заявки на патент High-Efficiency Method Using Unmanned Aerial Vehicles for Firefighting, которая была подана 29 октября 2018 г. и которой был присвоен серийный номер 62/752143. Полное содержание вышеупомянутой предварительной заявки включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Основное предполагаемое применение настоящего изобретения представляет собой тушение лесных пожаров с воздуха. Задача, поставленная перед раскрытым способом и связанным с ним беспилотными летательными аппаратами (БЛА), описанными в настоящем документе, предусматривает охват большой площади при ликвидации лесных пожаров, в том числе выявление лесных пожаров высокой интенсивности, происходящих в труднодоступных областях для обычного тушения низовых пожаров с воздуха. Хотя текущее изобретение описано в связи с пожаротушением с воздуха, специально предусмотрены военные применения раскрытого способа и связанных с ним БЛА.
УРОВЕНЬ ТЕХНИКИ
В связи с глобальным повышением температуры не только прогнозируется, но уже было продемонстрировано, что лесные пожары станут более частыми из-за экстремальных колебаний погоды от тяжелых засух до сильных гроз. Лесные пожары являются фактором, ускоряющим глобальное потепление; действительно, количество CO2, выделяемое в мире, представляет собой соответствующий процент от общего выброса CO2 от использования ископаемого топлива.
Лесные пожары являются частью природного цикла, но нынешнее увеличение глобальных температур, по-видимому, является изменением цикла и, независимо от того, что вызывает это, люди должны делать все возможное, чтобы задержать процесс, который может привести к изменению текущего состояния Земли.
Как показывают результаты, текущие средства тушения лесных пожаров не справляются с задачей. Даже в странах, которые согласно анализу лучше всего подготовлены к лесным пожарам, периодически повторяются пожары, которые не удается потушить в течение нескольких недель, месяцев и даже более года.
Лесные пожары - одни из самых трудных для тушения из-за их высокой энергии и поскольку они обычно происходят в труднодоступных местах. Использование самолета для тушения лесных пожаров кажется очевидным выбором не только из-за проблемы доступности, но и в связи с необходимостью быстрого реагирования.
При тушении лесных пожаров используется большое разнообразие самолетов для перевозки/сброса воды или ингибиторов горения. Их примеры включают:
пожарные самолеты, специально разработанные для пожаротушения, например, CL215, CL415;
сельскохозяйственные самолеты, хорошо приспособленные для пожаротушения, например, AT802;
транспортные самолеты, приспособленные для перевозки/сброса воды или ингибиторов горения, например, C130, C27, C17;
коммерческие реактивные воздушные судна, приспособленные для перевозки и сброса жидкостей, например, B747, DC10, BAE146, IL76;
вертолеты любого типа, оснащенные баками;
беспилотный вертолет, например, Kaman K-MAX.
Большое разнообразие самолетов, используемых для пожаротушения, является признаком следующего:
a) количество самолетов, выделенных для этой работы, недостаточно для выполнения задачи, поэтому в эти разнообразные типы конструкций постоянно вносятся специальные инновационные решения.
b) отсутствует четкая тенденция в направлении ограниченного количества эффективных и достаточных способов и средств пожаротушения.
Такой простой на первый взгляд процесс, как тушение пожара с воздуха, особенно в случае лесных пожаров, предусматривает высокие риски и технические ограничения, так что текущее общее мнение пожарных: авиация оказывает огромную помощь, но она не может потушить лесные пожары.
Технические ограничения использования самолетов для сброса воды, ингибиторов или любых материалов для пожаротушения (совместно называемых «материал(-ы)»), обусловлены необходимой низкой скоростью полета на низкой высоте, причем во многих случаях приходится сталкиваться с высокой турбулентностью, низкой видимостью и необходимостью лететь над горной местностью. Считается, что быть пилотом самолета для тушения лесных пожаров более рискованно, чем быть пилотом реактивного истребителя, и фактически, по всему миру, есть всего несколько сотен пилотов, которые действительно могут справиться с задачей пожаротушения.
Следовательно, использование других средств доставки материалов в недоступные области было бы преимущественным. Среди потенциальных альтернатив указывается следующее: контейнеры, доставляемые с помощью артиллерии и заполненные ингибитором, контейнеры, заполненные средствами для тушения пожаров и сбрасываемые с самолетов, летящих на более безопасной высоте, причем контейнеры приспособлены для высвобождения средств на меньшей высоте, чтобы уменьшить потерю средства из-за распыления на больших высотах, и контейнеры, снабженные парашютом, что обеспечивает снижение скорости, которая сводит к минимуму потери из-за распыления, и т. д.
Использование беспилотных летательных аппаратов (БЛА) в качестве решения для уменьшения рисков все еще находится в списке желаний, поскольку еще не существует способов и средств, основанных на использовании БЛА, которые могут выполнить задачу и быть экономически эффективными и практичными с практической точки зрения. Беспилотный вертолет Kaman K-MAX - это, может быть, единственный успешный случай, но ему присущи ограничения, связанные с вертолетами: например, капитальные расходы и эксплуатационные расходы, полезная нагрузка, скорость и диапазон действия.
В то время как в течение последних двух десятилетий произошло огромное развитие крылатых БЛА, ни один из существующих БЛА не может быть приспособлен к конкретным требованиям для тушения пожаров с воздуха.
Использование БЛА для тушения лесных пожаров, особенно лесных пожаров высокой интенсивности, и интеграция их в соответствующую рабочую систему представляет собой сложную проблему из-за множества параметров и ограничений. Это объясняет, почему, несмотря на срочную потребность в решении, пока нет ни одного; попытки нахождения решения сосредоточены на удовлетворении некоторых требований за счет других и не смогли предоставить работоспособное и практичное компромиссное решение.
Способы и устройство устраняют недостатки, указанные в настоящем документе, и предоставляют преимущественные способы/устройство для пожаротушения на основе БЛА, которые обеспечивают предпочтительные возможности пожаротушения. Также предусмотрены и доступны дополнительные применения способов/систем на основе БЛА, как это будет очевидно для специалистов в данной области техники на основе следующего описания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу и средствам для использования БЛА при пожаротушении с воздуха. Раскрытые способ и средства преимущественно приспособлены для доставки материалов для пожаротушения к цели(-ям) даже в самых сложных условиях, таких как лесные пожары высокой интенсивности, происходящие в горной местности в условиях низкой видимости или отсутствия видимости.
Раскрытые способ и связанные с ним средства позволяют тушить лесные пожары высокой интенсивности, а не только задерживать такие лесные пожары.
В настоящем изобретении также раскрыты признаки, которые позволяют БЛА транспортировать большие нагрузки материала для пожаротушения, даже тяжелее крейсерской массы БЛА, при этом сохраняя необходимую маневренность для перемещения к цели и для возврата при больших перегрузках.
В настоящем изобретении также предложены признаки, которые позволяют сбросить материалы на малой высоте/подъеме над целью и под углами, которые позволяют достичь высокой эффективности доставки и уменьшения потерь при распространении.
В настоящем изобретении также предложены способ и средства, которые позволяют минимизировать количество времени, в течение которого удаленный пилот управляет БЛА.
Кроме того, в настоящем изобретении также предложены способ и средства для возврата БЛА для быстрого возврата к непрерывной работе.
Дополнительные признаки, функции и преимущества раскрытых способа и средств на основе БЛА будут очевидны из следующего описания, особенно при прочтении в сочетании с приложенными графическими материалами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чтобы помочь специалистам в данной области техники при создании и использовании раскрытых способа(-ов) и средств, ссылка сделана на прилагаемые графические материалы, на которых:
на фиг. 1 представлен трехмерный вид сверху иллюстративного БЛА, связанного с раскрытым способом. Материалы для пожаротушения находятся в наружном гибком контейнере, прикрепленном к БЛА, например, тросом или кабелем. БЛА отображается при пикировании к цели, и у него развернуты аэродинамические тормоза;
на фиг. 2 представлен трехмерный вид снизу иллюстративного БЛА, связанного с раскрытым способом. Материалы для пожаротушения находятся в наружном гибком контейнере, прикрепленном к БЛА, например, тросом или кабелем. БЛА отображается при пикировании к цели, и у него развернуты аэродинамические тормоза;
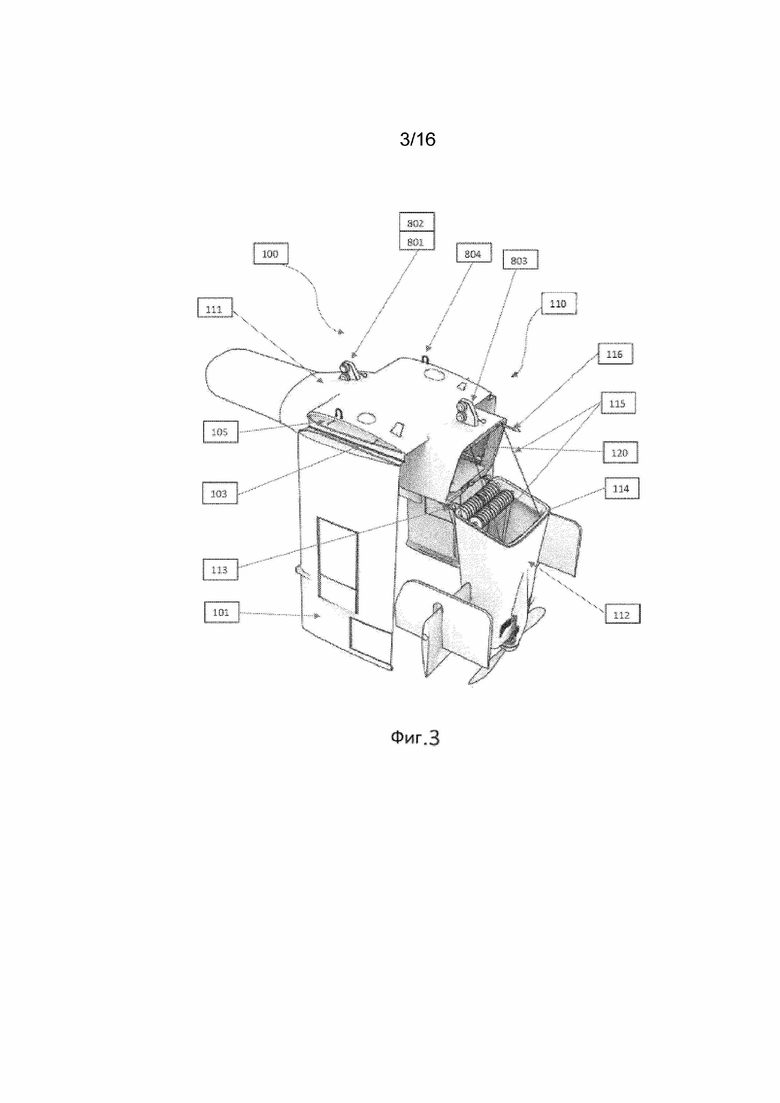
на фиг. 3 показан трехмерный вид предпочтительного варианта осуществления БЛА, связанного с раскрытым способом. Как крылья, так и фюзеляж показаны в сложенном положении;
на фиг. 4 показан вид в разрезе через грузовой отсек транспортного самолета. На нем показано, как сложенный БЛА может входить согласно иллюстративному варианту осуществления;
на фиг. 5 показан трехмерный вид нескольких (3) БЛА, показанных в сложенном положении и расположенных для максимального использования пространства;
на фиг. 6 показан частичный продольный разрез через транспортный самолет, показывающий загруженные в него БЛА;
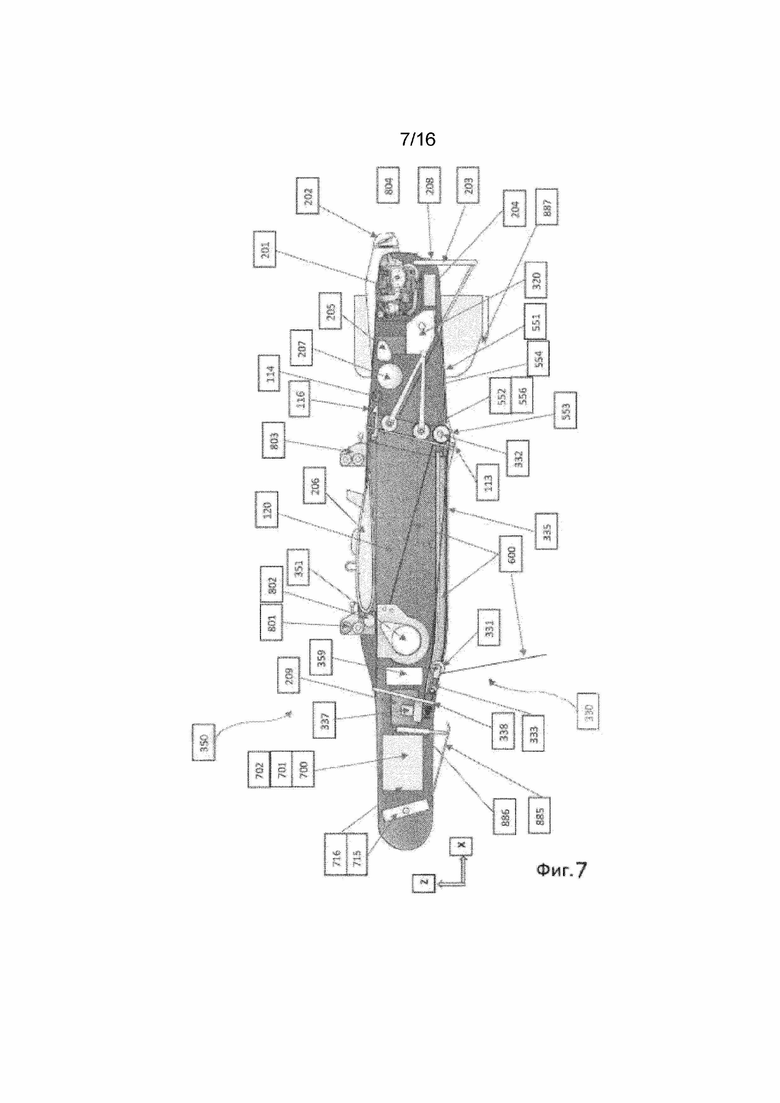
на фиг. 7 показан продольный (X-Z) разрез через иллюстративный БЛА в соответствии с настоящим раскрытием;
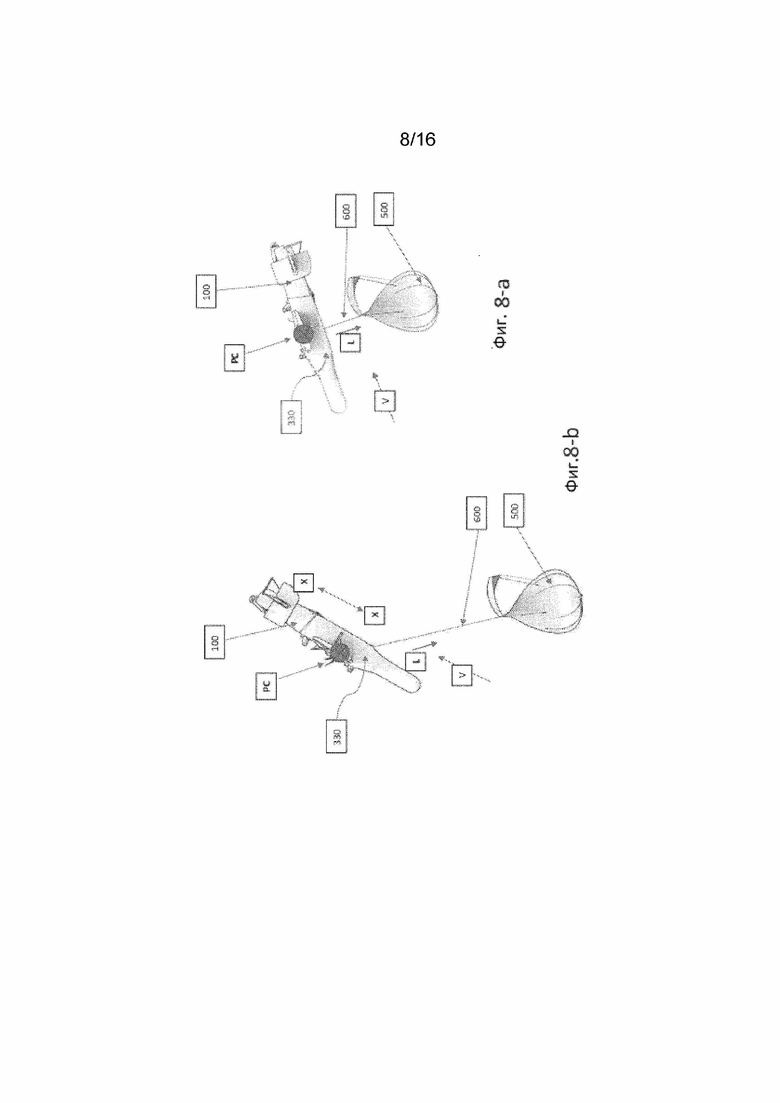
на фиг. 8-a и фиг. 8-b изображены принципы, связанные с системой обеспечения устойчивости, раскрытой в настоящем изобретении;
на фиг. 9 показан подробный трехмерный вид иллюстративной установки шкива обеспечения устойчивости;
на фиг. 10-a показан продольный (X-Z) разрез иллюстративного БЛА, в то время как опустошенный контейнер показан втягиваемым в грузовой отсек БЛА;
на фиг. 10-b показан частичный трехмерный вид, показывающий иллюстративную систему возврата опустошенного контейнера и загрузки его посредством системы загрузки грузового отсека;
на фиг. 11-a показан трехмерный вид иллюстративного контейнера;
на фиг. 11-b показан схематический разрез через водонепроницаемые застежки, предусмотренные на иллюстративном контейнере;
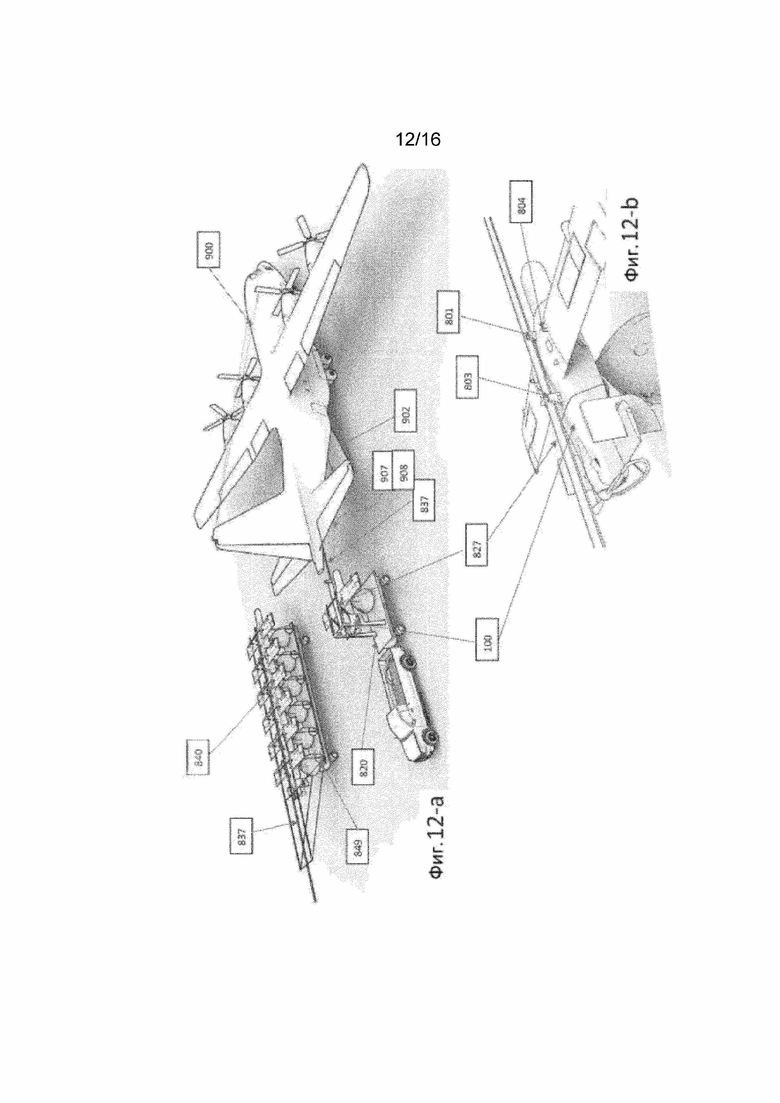
на фиг. 12a показан трехмерный вид иллюстративных способов загрузки БЛА в транспортный самолет. Изображенные способы включают (i) загрузку один за другим, и (ii) загрузку всей нагрузки БЛА, установленных на стойке;
на фиг. 12-b показан подробный трехмерный вид, показывающий иллюстративную систему установки БЛА на рельсе, причем система может использоваться для обслуживания и для установки и выпуска БЛА с транспортного самолета;
на фиг. 13 показан иллюстративный БЛА, готовый для выпуска с транспортного самолета. Крылья БЛА только частично развернуты из-за геометрических ограничений двери транспортера;
на фиг. 14-a, 14-b, 14-c и 14-d показаны иллюстративные фазы полета между выпуском и стабилизированным полетом:
фиг. 14-a: БЛА выпущен и он поднимается над спутной струей транспортера, оттягиваемый тросом;
фиг. 14-b: контейнер падает и трос отпускается, чтобы уменьшить нагрузки на транспортер;
фиг. 14-c: трос сматывается с помощью лебедки внутри БЛА, что оттягивает БЛА вниз, в сторону контейнера;
фиг. 14-d: контейнер и БЛА находятся на заданном расстоянии и БЛА входит в фазу стабильного полета, разворачивая тормоза или запуская двигатель при необходимости.
на фиг. 15 показан иллюстративный БЛА, входящий в свою траекторию пикирования к цели, расположенной в труднодоступном месте в горной местности;
на фиг. 16 показан схематический образец, показывающий, как факторы и окно возврата могут быть показаны на дисплее удаленного пилота.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Как указано выше, настоящее изобретение относится к способу и средствам для использования БЛА при пожаротушении с воздуха. Раскрытые способ и средства преимущественно приспособлены для доставки материалов для пожаротушения к цели(-ям) даже в самых сложных условиях, таких как лесные пожары высокой интенсивности, происходящие в горной местности в условиях низкой видимости или отсутствия видимости.
Основные цели и ограничения, которые приводят к раскрытому способу и признакам, связанным с БЛА, раскрытым в настоящем изобретении, включают следующее:
Предоставление решения, эффективного с точки зрения эксплуатационных затрат и инвестиций, способного охватывать большое разнообразие условий тушения лесных пожаров, в том числе тушения лесных пожаров высокой интенсивности.
Максимальное повышение эффективности транспортировки, определенной в настоящем документе как соотношение общей массы материала, перевозимого всеми БЛА на борту транспортного самолета, и максимальной полезной нагрузки транспортного самолета (далее называемого «транспортер»);
Максимальное повышение эффективности доставки, определенной в настоящем документе как соотношение количества материала, которое достигает цели (далее называемого «полезный материал»), и общего количества материала, сбрасываемого БЛА.
Возможность доставки с небольшой высоты над целью и действительная способность бомбардировки с пикирования являются ключевыми задачами настоящего изобретения.
Высота и скорость полета, при которой даже медленно летящий самолет сбрасывает воду и ингибиторы горения, по-прежнему велики, чтобы вызвать существенные потери полезного материала из-за распыления и испарения, прежде чем достичь земли/цели. Этот эффект усиливается восходящим потоком.
Относительно высокая минимальная скорость и относительно низкая маневренность, ограничивающая минимальную высоту над землей переоборудованных пассажирских реактивных самолетов, приводит к низкой эффективности доставки, несмотря на большое количество материала, которое они перевозят. Переоборудованный DC10 или B747 распределяет материал по площади величиной с футбольное поле, так что их типичная плотность доставки может быть в три раза ниже, чем у пожарного самолета CL-415. Доставка материала в пикировании уменьшает распыление.
i) Возможность высокой скорости плотности доставки (DDS - англ.: delivery density speed), определенной в настоящем документе как количество полезного материала, доставляемого на единицу площади за единицу времени. DDS, по мере необходимости для лесных пожаров высокой интенсивности, максимизируется бомбардировкой с крутого пикирования и сбросом материала с самой малой высоты.
Тушение некоторых высокоинтенсивных пожаров может требовать, чтобы несколько нагрузок материала были сброшены на одном месте в быстрой последовательности.
Возможность увеличения DDS за счет сброса через короткие интервалы нескольких нагрузок по одной и той же цели, является неотъемлемой частью раскрытого способа и связанных с ним БЛА.
Тушение даже нового возгорания в лесу (высокая интенсивность, небольшая площадь) требует DDS, которая может в 5-30 раз превышать DDS, достижимую при текущем тушении с воздуха за один заход. Нескольких заходов через короткие интервалы трудно добиться с текущей технологией и с имеющимся парком и принципами дозаправки/эксплуатации.
ii) Возможность низкой DDS: низовой и травяной пожары требуют более низкой DDS для тушения, и в этом случае более высокое распыление является более экономичным. Более существенное распыление достигается в горизонтальном полете и сбросе с большей высоты над целью.
Возможность поражения нескольких целей: одна из самых заметных характеристик лесных пожаров высокой интенсивности представляет собой вторичные возгорания, возникающие в результате того, что горящие материалы подхватываются восходящим потоком и переносятся ветром. Это приводит к образованию новых фронтов пожара, которые очень быстро расширяются. Они могут выйти далеко за противопожарную просеку и могут поймать в ловушку наземные команды и привести к их гибели.
Такие точки вторичного воспламенения трудно тушить с помощью текущих противопожарных самолетов, потому что они должны фактически летать над этими точками вторичного воспламенения.
Возможность тушения нескольких целей в быстрой последовательности - это выгода/преимущество раскрытого способа и связанных с ним БЛА.
Попадание в цель с уверенным возвратом. Текущее тушение с воздуха не может быть выполнено в полной мере по любой цели из-за проблем безопасности и технических ограничений. Целью настоящего изобретения является обеспечение возврата БЛА после достижения труднодоступных целей, таких как лесной пожар высокой интенсивности на склоне, при восходящем потоке высокой турбулентности и низкой, даже нулевой видимости. Соответствие требованиям:
БЛА должен обладать маневренностью при больших перегрузках и выдерживать высокую скоростью подъема после сброса материала.
БЛА должен быть оснащен оптоэлектроникой по мере необходимости для обеспечения ситуационной осведомленности удаленного пилота и предоставлять точные данные на системы навигации и автопилота БЛА.
БЛА должен быть способен летать при высокой температуре, через огневое пламя, в течение 5-10 секунд.
Минимизация количества удаленных пилотов. БЛА должны быть оснащены навигационной системой и автопилотом, способной осуществлять по меньшей мере возврат, полет и посадку на предварительно определенный аэродром в заданное время.
Сниженный риск пожара, вызванного случайной аварией БЛА. Топливные баки БЛА должны быть ударостойкими. При подробном анализе могут использоваться другие противопожарные системы, такие как автоматический выпуск пены, использование азота для заполнения бака.
Минимизация загрязнения. БЛА должны быть способны перевозить опустошенные контейнеры обратно для повторного использования.
Безопасность воздушного движения не является предметом настоящего изобретения - этот вопрос должен быть проработан с регулирующими органами. Способ и средства, предложенные в настоящем изобретении, позволяют провести интеграцию в систему, отвечающую требованиям регулирующих органов:
Способ и связанные с ними БЛА, представленные в настоящем изобретении, работают даже если они запущены с высоты ниже 1829 м (6000 футов) над уровнем земли. Тем не менее, предполагается, что региональные диспетчерские центры управления воздушным движением согласятся закрыть рабочую зону для всего другого движения, по меньшей мере, ниже определенного эшелона полета.
Навигационное оборудование БЛА обеспечивает маршруты возврата с малой высотой над землей, которая не используется коммерческой авиацией и выбрана таким образом, чтобы ее также не занимала гражданская авиация или частные самолеты. Указанные маршруты минимизируют прохождение над населенными пунктами - условия, на которые, как правило, согласны органы управления воздушным движением.
Региональные диспетчерские центры управления воздушным движением в пожароопасных районах должны предусматривать процедуру ускоренного анализа, коррекции и одобрения предложенных маршрутов БЛА от рабочей зоны до указанных аэродромов.
БЛА, связанные с раскрытым способом, имеют эффективную навигационную систему, необходимую для задания, и она предусматривает платформу для любого дополнительного оборудования, например, транспордеров, согласно требованиям регулирующих органов.
Маршрут транспортных самолетов в направлении рабочей зоны и из нее должен быть согласован с обычными правилами воздушного движения.
Винтомоторная установка
На фиг.1 показаны общие признаки предпочтительного варианта осуществления БЛА 100, связанного со способом, раскрытым в настоящем изобретении.
Предпочтительный вариант осуществления представляет собой моторизованный БЛА. Предпочтительный вариант осуществления, показанный на фиг. 1, представляет собой винтомоторную установку 200 с толкающим винтом, но по выбору конструктора может использоваться любая винтомоторная установка, которая соответствует требованиям.
Винтомоторная установка является ключевой особенностью БЛА, связанных с раскрытым способом; это позволяет возвращать БЛА даже из удаленных и недоступных рабочих зон, а также иметь в распоряжении возвращенные БЛА для непрерывной работы.
БЛА типа планера полагается на скорость, чтобы достичь безопасной высоты для полета к месту, откуда он может быть возвращен. Однако его работа обусловлена существованием посадочной площадки в пределах досягаемости от рабочей зоны. Условие эффективности состоит в том, что возвращенные БЛА могут быть быстро возвращены в эксплуатацию, что подразумевает, что посадочная площадка должна служить базой также для транспортных самолетов.
Винтомоторная установка увеличивает стоимость БЛА, но она обеспечивает короткую межполетную подготовку, что в конечном итоге снижает эксплуатационные затраты. Инвестиции также уменьшаются, поскольку для одной и той же работы потребуется меньше моторизованных БЛА.
Как показано на фиг. 1, двигатель 201 приводит в действие винт 202. Защитный элемент винта 203 предусмотрен на нижней стороне для защиты винта во время посадки и предотвращения запутывания кабеля или троса 600, который далее называется просто «тросом», который прикрепляет контейнер 500 для материалов для пожаротушения к несущей конструкции БЛА 100.
Другие системы, связанные с винтомоторной установкой, показаны на фиг. 7, которая представляет продольный (X-Z) разрез через БЛА, показывающий общую компоновку по отсекам. Системы и их местоположения предназначены только для справки, они являются частью общих знаний в области авиастроения.
Отсек 204 под двигателем содержит масляный бак двигателя и систему охлаждения масла. 205 обозначает промежуточный топливный бак, а в области 206 в кессоне крыла расположены основные топливные баки.
Впускные отверстия для воздуха обозначены позицией 207 на фиг. 1, а выпускное отверстие обозначено позицией 208 на фиг. 2 и 7.
207 обозначает баллон сжатого воздуха для подачи в двигатель 201 воздуха при прохождении через области с очень высокими температурами. Из того же бака воздух подается в органы пневмоуправления.
Аккумулятор 210 расположен рядом с лебедкой 351, работающей при перегрузках, его частотным инвертором 359 и отсеком 700 электроники (двигатель запускается во время полета с пикированием и, следовательно, его работе помогает скорость воздуха).
Наружный гибкий контейнер, прикрепленный тросом к БЛА.
Как показано на фиг. 1, материал для пожаротушения перевозится в гибком контейнере 500, называемом далее «контейнером», который присоединен тросом 600 к несущей конструкции БЛА, просто БЛА 100 далее.
Использование наружного контейнера упрощает складную конструкцию БЛА (см. фиг. 3), что обеспечивает компактное расположение в грузовом отсеке транспортера, которое показано на фиг. 4, 5, 6. Это дает высокую эффективность транспортировки.
Примечание: в то время как текущая технология тушения с воздуха не предусматривает транспортировку БЛА, эффективность транспортировки все еще ограничена. Водяные баки и системы быстрого сброса воды относительно тяжелые. Например, одна система тушения с воздуха на основе очень распространенного транспортного самолета, который имеет полезную нагрузку в размере 20 тонн, может перевозить только 12 тонн воды из-за веса водяных баков.
Наружный контейнер, прикрепленный тросом, также является основой для двух систем, раскрытых в настоящем изобретении, систем, которые являются ключом к достижению целей задачи эффективно и в пределах определенных ограничений.
Первая из систем позволяет БЛА перевозить тяжелые нагрузки в полетах, начиная от горизонтального движения до крутого пикирования, а вторая система уменьшает перегрузки на БЛА. Уменьшенные перегрузки на БЛА дают в результате более низкий вес БЛА и, следовательно, более высокую эффективность транспортировки и маневренность.
Наружный контейнер также дает возможность применять фюзеляж небольшого поперечного сечения. Вместо наличия громоздкого внутреннего герметичного бака, предпочтительный вариант осуществления БЛА имеет грузовой отсек 120 на фиг. 3, 7, размерность которого позволяет хранить опустошенный гибкий контейнер, обозначенный позицией 500 (фиг. 1). Это дает устойчивость, низкую стоимость конструкции и большой диапазон для обратного полета.
Как показано на фиг. 3, фюзеляж 110 имеет две секции: хвостовую часть 112 фюзеляжа, которая прикреплена посредством шарниров 113 (фиг. 3, 7) к носовой части 111 фюзеляжа, и он поднимается из показанного сложенного положение в разложенное положение электрическим двигателем 114 (фиг. 7), установленным на хвостовой части 112 фюзеляжа с противоположной стороны от шарниров 113. Мотор 114 скручивает пару кабелей 115 (фиг. 3), прикрепленных к носовой части фюзеляжа, поднимая хвостовую часть 112 фюзеляжа до тех пор, пока она не будет зафиксирована схематически показанными фиксаторами 116 (фиг. 3, 7). Развертывание фюзеляжа выполняется до выпуска с транспортного самолета.
На фиг. 4 показан предпочтительный вариант осуществления БЛА 100, когда он установлен в грузовом отсеке транспортного самолета 980. Сложенные крылья 101 соединены с помощью шарниров 103 и поднимаются из показанного сложенного положения в разложенное положение с помощью приводов 104, и удерживаются на месте посредством схематически показанных фиксаторов 105. Следует отметить, что шарниры 103 должны выдерживать перегрузки. Во время полета транспортера в рабочую зону крылья 101 прижимаются приводами 104 к амортизаторам 909 для предотвращения балансировки.
Предпочтительный вариант осуществления БЛА, связанного с раскрытым способом, представляет собой схему с высокорасположенным крылом. Как это очевидно из фиг. 4, высокорасположенное крыло обеспечивает больший размах крыла при одинаковых общих размерах в сложенном состоянии.
Органы управления полетом
300 Органы управления полетом согласно предпочтительному варианту осуществления БЛА показаны на фиг. 1 и содержат:
Расположенные на крыльях 101 элероны 301, независимо приводимые в действие (крылья 101 могут складываться), и они также могут быть использованы как закрылки (флапероны).
Два набора тормозов на верхней и на нижней стороне, соответственно 302 (фиг. 1) и 303 (фиг. 2) предусмотрены на крыльях 101. Каждый тормоз имеет два сегмента, внутренний и наружный (без позиционного обозначения). Один или множество сегментов также могут быть использованы в зависимости от выбора конструктора приводной системы. На фиг. 1 показаны как внутренний, так и наружный сегменты в развернутом положении.
Цельноповоротный стабилизатор 312 (вместо стабилизатора и руля высоты) предусмотрен в предпочтительном варианте осуществления БЛА 100 для соблюдения компактной конструкции в сочетании с высокими требованиями к маневренности согласно задаче. 312-L и 312-R стороны цельноповоротного стабилизатора 312 устанавливаются на одном валу.
Два руля 313 направления используются в предпочтительном варианте осуществления БЛА из-за требований к компактности. Рули 313-L и 313-R направления установлены на цельноповоротных стабилизаторах 312-L и 312-R. В предпочтительном варианте осуществления БЛА 100 используется независимое приведение в действие для каждого руля направления для использования их также в качестве тормозов; рули 313 направления показаны в сходящемся положении на фиг. 1, 2.
Приводы рулей направления, которые не показаны, установлены на валу (не показан), соединяющем две стороны цельноповоротного стабилизатора 312. Цельноповоротный стабилизатор и приводы рулей направления установлены в отсеке 320, фиг. 7. Элероны и тормозные приводы расположены внутри крыльев 101 и не показаны.
Две дополнительные системы, раскрытые в настоящем изобретении, интегрированы в органы управления полетом БЛА и являются ключом к решению рабочих целей и эффективности раскрытого способа. Обе системы стали возможными за счет прикреплена контейнера 500 к БЛА 100 посредством троса 600 (фиг. 1, 2)
Одна, первая, дополнительная система управления полетом, упомянутая далее как «система обеспечения устойчивости в пикировании» 330 (фиг. 7), регулирует направление силы L (фиг. 1, 2, 8-A, 8-B), прикладываемой контейнером 500 в отношении центра давления PC БЛА, за счет регулирования продольного (X-X) положения троса 600, прикрепленного к БЛА 100 (фиг. 8-a, 8-b)
Примечание. Для того чтобы удерживать БЛА 100 вне спутной струи контейнера 500, длина троса 600 больше при крутом пикировании (фиг. 8-b) по сравнению с планированием (фиг. 8-а).
Система обеспечения устойчивости в пикировании позволяет перевозить тяжелый контейнер 500 в стабилизированном полете от горизонтального до крутых углов даже для схемы с высокорасположенным крылом с относительно небольшими стабилизаторами или цельноповоротными стабилизаторами.
Переход из горизонтального угла к высокому углу пикирования является ключевым требованием задачи раскрытого способа. Помимо точности, связанной с бомбардировкой с пикирования, высокие углы пикирования уменьшают распыление и, следовательно, это дает высокую эффективность доставки и плотность доставки.
Как показано на фиг. 2, 7, трос 600 оборачивается вокруг шкива 331 обеспечения устойчивости со скольжением вперед-назад на направляющей 335, предусмотренной на нижней части фюзеляжа БЛА 100, а затем он оборачивается вокруг фиксированного шкива 332, что делает оборот почти на 180° до намотки на лебедку 351 (фиг. 7), называемую далее «лебедкой, работающей при перегрузках», расположенной внутри грузового отсека 120 БЛА.
Как показано на подробном трехмерном виде спереди, фиг. 9, шкив 331 обеспечения устойчивости установлен на держателе 333 шкива, который перемещается на четырех роликах 334 по направляющей 335, которая встроена в несущую конструкцию БЛА. Для ясности держатель 333 показан прошедшим свое самое заднее положение, вне направляющей 335.
Сила на шкиве 331 обеспечения устойчивости всегда действует назад, а положение держателя 333 шкива регулируется приводом 337 (фиг. 7), который натягивает кабель 338.
Шкив обеспечения устойчивости образован двумя частями: левой 331-L и правой 331-R, установленными на радиальных подшипниках (не показаны), которые обеспечивают осевое движение. Две половины шкива 331 удерживаются прижатыми друг к другу посредством роликов 339, ограниченных боковыми стенками 336 направляющей 335. Ролики 339 могут скользить в направлениях влево и вправо и установлены на направляющих, предотвращающих вращение (не показаны), и они нажимают на шкив через осевые подшипники (не показаны). После сброса материала 501 из контейнера 500 (фиг. 1, 2) держатель 333 откатывается в самое заднее положение, соответствующее маневру возврата БЛА. Когда держатель 333 достигает самого заднего положения, ролики 339 выталкиваются кулачками 340 в отверстия 341, предусмотренные на боковых стенках 336 направляющей 335. Это приводит к тому, что две части 331-L и 331-R шкива обеспечения устойчивости внезапно открываются и отпускают трос 600, который теперь идет к лебедке, проходя только по шкиву 332 (фиг. 7, 10-b); эта конфигурация соответствует возврату контейнера 500.
Вторая дополнительная система управления полетом, называемая далее «системой плавного нарастания нагрузки» 350 (фиг. 7) имеет две функции, интегрированные в органы управления полетом БЛА:
Первой функцией системой плавного нарастания нагрузки является ограничение перегрузок, которые обычно передаются контейнером 500 к БЛА 100 во время маневров при высоких перегрузках.
Лебедка 351, работающая при перегрузках (фиг. 7), регулирует силу и ускорения во время сматывания и разматывания троса 600, защищая БЛА от высоких пиковых нагрузок. Практически в условиях маневра при высоких перегрузках лебедка 351, работающая при перегрузках, разматывает трос 600 с регулируемым ускорением и подсчитывает оставшуюся длину смотанного троса. Затем лебедка 351, работающая при перегрузках, начинает сматывать трос 600 при контролируемом ускорении, что приводит к контролируемой перегрузке на БЛА. Вкратце, высокая нагрузка с низкой длительностью распределяется (со сглаживанием) как более низкая нагрузка в течение более длительного периода.
Один пример маневра с высокими перегрузками представляет собой выпуск БЛА с транспортера 800 (фиг. 13, 14-a,14-b, 14-c, 14-d). Во время критической фазы выпуска лебедка 351, работающая при перегрузках, оставляет трос 600 практически свободным, вследствие чего нагрузки на БЛА практически равны нагрузкам, обусловленным его собственной массой.
Система 350 плавного нарастания нагрузки является ключом для других маневров, как объясняется далее.
Вторая функция системы 350 плавного нарастания нагрузки придает БЛА, связанным с раскрытым способом, гибкость, необходимую для регулирования плотности доставки (DD - англ.: Delivery Density) - см. требования c) и d-i), и d-ii).
Низкая DD влечет за собой более высокое распыление и, следовательно, более низкую эффективность доставки, но это все еще лучший способ для тушения низкоэнергетических лесных пожаров. Низкая DD достигается путем сброса материала, летящего горизонтально или при умеренных углах и с относительно небольшой высоты.
Среднюю DD можно получить, удлинив трос 600, так что БЛА 100 может лететь более безопасно, выше вышеупомянутой цели, а материал 501 (фиг. 1, 2) сбрасывается с меньшей высоты над целью.
Максимальную DD можно получить при пикировании и, в данном случае, удлинение троса 600, не только сбрасывает нагрузку 501 на меньшей высоте над целью, но также уменьшает перегрузки на БЛА. БЛА уже находится в режиме возврата, когда материал сбрасывается, как показано на фиг. 15
Третья функция системы плавного нарастания нагрузки/возврата контейнера.
Лебедка 351, работающая при перегрузках (фиг. 7 и фиг. 10-а), также является частью системы возврата контейнера, которая тянет опустошенный контейнер 500-е и перемещает его внутрь грузового отсека 120 БЛА. Контейнер 500 может также быть оставлен или перевозиться не в состоянии для хранения, но это будет конфликтовать с требованием j), либо с аэродинамически чистым БЛА для большего диапазона полета.
Следует отметить, что некоторые используемые в настоящее время системы тушения с воздуха, чтобы повысить эффективность доставки, используют одноразовые контейнеры, некоторые из которых оснащены парашютами. Некоторые другие системы используют снаряды, загруженные ингибиторами горения.
Функция возврата контейнера не интегрирована в органы управления полетом - она только запускается при сбросе материала 501 из контейнера 500. Она запускает сматывание троса 600 и тянет опустошенный контейнер 500-е (фиг. 10-а), что в конечном итоге открывает подпружиненную откидную дверцу 551 (фиг. 10-a, 10-b, фиг. 7) и впоследствии он входит между загрузочными спиральными катушками 552 и 553, как показано на фиг. 10-а, 10-b)
Когда подвеска 505 контейнера (фиг. 11-a, 11-b) достигает лебедки 351, лебедка прекращает сматывать трос 600.
Нижняя катушка 553 образована из двух секций, левой и правой, неподвижной катушки 352 (фиг. 10-b).
Верхняя катушка 552 установлена между левым и правым рычагами 554 (фиг. 10-a, фиг. 7), которые подпружинены таким образом, что верхняя катушка 552 прижимается к нижней катушке 553. Верхняя катушка снабжена мотором 556, который не показан (расположен внутри катушки), и он начинает вращаться, когда откидная дверца 551 открывается входящим контейнером 500-e. Оба катушки 552 и 553 снабжены спиральными выпуклостями 555 (рис. 10-b), которые в сочетании с направлением вращения верхней, моторизованной катушки 552 толкают материал контейнера 500-E к боковым сторонам, сглаживая его при заталкивании в грузовой отсек 120 (фиг. 10-b). Закрывание откидной дверцы 551 приводит к остановке мотора 556.
Как показано на фиг. 10-a, после сброса материала 501 опустошенный контейнер 500-e следует за БЛА 100 и защитный элемент 203 винта предотвращает случайное запутывание с винтом 202.
Контейнер 500
Контейнер 500 для перевозки материала 501 показан на фиг. 11-a. Контейнер имеет в основном сферическую форму, которая под массой перевозимого материала 501 имеет тенденцию деформироваться в форму груши, когда он подвешен на тросе 600. Его обшивка 510 изготовлена из непроницаемого складного высокопрочного материала. Обшивка 510 также укрепляется путем связанных армирующих элементов 511 (фиг. 11-b) и тросов 512 (фиг. 11-а), расположенных для направления нагрузок к подвеске 505 контейнера, которая прикреплена к тросу 600.
Как показано на фиг. 11-a, контейнер 500 снабжен средствами 520 для широкого открывания для быстрого сброса материала 501. Они состоят из множества водонепроницаемых швов 521 типа застежек, расположенных вдоль вертикальных линий контейнера, начинаясь приблизительно на средней горизонтальной линии и сходясь на нижнем конце 504 контейнера.
Как показано на фиг. 11-B, швы образуются двумя частями, по существу жестким держателем 522 крючка и гибким крючком 523, которые при зацеплении образуют водонепроницаемое соединение, закрепленное на месте гибкой нитью 524, которая сжимается между держателем крючка и крючком.
Конструкция шва 521 в виде застежки такова, что если один конец нити 524 оттягивается из шва, гибкий крючок 523 под давлением материала 501 сгибается и открывает шов, причем этот открытый участок затем распространяется вдоль всего шва 521.
Швы 521 сходятся на нижнем конце контейнера, и они герметизируются и сжимаются между двумя пластинами механизма 525: одной пластиной внутри контейнера 526 и другой пластиной 527 снаружи контейнера. Механизм 525 снабжен аккумулятором и запускается по беспроводной связи для высвобождения сжимающей силы между пластинами 526 и 527, что приводит к открыванию швов 521. После открывания на нижнем конце открытый участок распространяется по всему шву к области возле центральной горизонтальной линии контейнера, что приводит к внезапному сбросу материала 501.
Парашют
Предпочтительный вариант осуществления контейнера 500 снабжен системой парашюта 530, которая в основном предназначена для выполнения функции тормоза во время крутого пикирования, но она спроектирована так, что при малых углах она также способствует некоторому подъему, как это можно увидеть на наглядных видах на фиг. 8-а, 8-b. Парашют обеспечивается только на одной стороне контейнера из соображений устойчивости. Также из соображений устойчивости отверстия 532 предусмотрены в куполе 531 парашюта Длина купола ограничена меньше, чем длина опустошенного контейнера для предотвращения запутывания в винте 202 (см. фиг. 10-a, 10-b) во время возврата контейнера. Пять шнуров парашюта 533 прикреплены к соответствующим армирующим тросам 512 и один из них прикреплен к подвеске 505.
Оборудование 700 для пилотирования и навигации
Понятно, что БЛА, связанный со способом, раскрытым в настоящем документе, может быть сконструирован с использованием различных типов оборудования для соответствия одинаковым требованиями задачи в зависимости от достижений технологии и возможностей и предпочтений конструктора.
Связанная с оборудованием основная цель предпочтительного варианта осуществления БЛА 100 состоит в том, чтобы предложить правильную платформу для различных альтернативных вариантов оборудования, что означает:
БЛА оснащен полным набором органов управления аэродинамическим полетом и дополнительных систем, необходимых для конкретной задачи БЛА: системой 330 обеспечения устойчивости в пикировании и системой 350 плавного нарастания нагрузки, которые раскрыты в настоящем изобретении.
БЛА имеет возможность нести и обеспечивать необходимое пространство для электроники, радара и оптоэлектроники, и обеспечивать необходимое для них энергоснабжение.
Режимы и маневры полета:
На основании текущего состояния цифровых технологий может быть предусмотрен полностью автономный БЛА. Учитывая время и стоимость разработки, предпочтительный способ состоит в том, чтобы удаленно управлять полетом БЛА к цели. Удаленный пилот решает как подойти к назначенной цели и делает раздельные регулировки или даже изменяет цель для лучшего использования материала. Эффективная полная автономность может быть реализована, когда станет доступным уровень искусственного интеллекта, «обученного» на комплексном материале пожаротушения.
Связанный с полетом предпочтительный вариант осуществления БЛА:
Выпуск автоматизирован - маневр со сложной и быстрой последовательностью.
Удаленное пилотирование БЛА к цели и сброс материала, инициированный удаленным пилотом.
Возврат автоматизирован, и он запускается при сбросе материала. В качестве резервного средства безопасности сброс материала автоматически запускается, если пилот поздно реагирует, что ставит под угрозу возврат.
Возврат на базу и приземление автоматизированы.
Следует отметить, что фаза удаленного пилотирования представляет собой небольшой процент от общего времени полета БЛА, который соответствует требованию h) задачи. Пилотируемое время составляет порядка 1-5 минут, а возврат на базу может означать 100 миль или около того полета.
Удаленные пилоты расположены в региональном командном центре или, если низкоорбитальная связь не удовлетворяет условиям, они будут расположены в транспортном самолете или в специализированном самолете, выделенном для операций. Следует обратить внимание, что, в случае, если несколько транспортеров работают в одной зоне, способ подразумевает, что операциями управляет координатор рабочей зоны, обеспеченный всеми средствами, чтобы получить полную ситуационную осведомленность, и средствами для связи со всеми наземными и воздушными командами в области.
Электроника для полета, нацеливания, навигации и пилотирования в целом показана в области 700, фиг. 7.
Антенна для связи с удаленным пилотом в целом указана позицией 711, фиг. 1. Информация, полученная пилотом, включает следующее.
Визуальная информация (система улучшенного видения II) - несколько датчиков, (712 и 713, фиг. 1).
ИК-изображение, настроенное для высоких длительных температур. (712)
Искусственно создаваемое изображение - первая итерация GNSS (антенна 714, фиг. 1) + точность положения и пространственного положения, дополненные информацией от радара 715 с фазированной антенной решеткой, фиг. 7, дополнительно описано далее.
Примечание: удаленный пилот может переключаться между информацией или перекрывать информацию на экране или на носимом нашлемном дисплее.
Широкоугольный индикатор пространственного положения, см. 750 на фиг. 16, указывающий факторы 756, рекомендуемый маршрут для возврата 754, а также «окно возможностей» возврата, которое является графическим представлением 760 (фиг. 16) краев относительно препятствий, как дополнительно описано далее.
Органы управления удаленного пилота:
Все органы управления аэродинамическим полетом (описанные ранее), двигатель и сброс нагрузки.
Посредством автопилота: система 330 обеспечения устойчивости в пикировании (фиг. 7) (приблизительно то же, что система автотриммирования на обычном самолете) и система 350 плавного нарастания нагрузки (фиг. 7).
Органы 701 управления автопилота (фиг. 7):
Все органы управления аэродинамическим полетом (описанные ранее), двигатель.
Специфические системы, раскрытые в настоящем документе: система 330 обеспечения устойчивости в пикировании и система 350 плавного нарастания нагрузки.
Развертывание крыла (во время выпуска),
Сброс нагрузки, если необходимо учитывать риски возврата.
Привод 886 (фиг. 7) полозкового шасси 885.
Общие источники автопилота:
Блок управления полетом, упомянутый в настоящем документе после «навигационной системы», которая хранит и предоставляет данные навигации и задачи.
Информация о пространственном положении и курсе полета, исправленная/обновленнаяпосредством навигационной системы.
Датчики скорости полета, угла установки и предупреждения о приближении к режиму сваливания не показаны.
Баровысотомер для маршрута возврата.
Датчик приближения для посадки (выравнивание)
Специальные источники автопилота:
Траектория возврата, обновляемая в режиме реального времени, с подсказкой о предстоящем закрытии окна возможностей для возврата. (Физически отображается пилоту, фиг. 16)
Положение держателя 333 шкива обеспечения устойчивости.
Перегрузка, направление, скорость и ускорение вращения и крутящий момент на лебедке 351, работающей при перегрузках.
Длина троса 600, оставшегося на лебедке 351.
Навигационная система 702 (фиг. 7):
Хранит все данные маршрута и посадки для предоставления автопилоту и контроля с его стороны.
Ресурсы навигационной системы:
Антенна 714 GNSS (фиг. 1).
Радар 715 с фазированной антенной решеткой и процессор 716 (фиг. 7).
Специализированный процессор, который в реальном времени корректирует положение и пространственное положение и обновляет искусственно создаваемое изображение.
Следует обратить внимание, что инерциальная навигационная система (INS - англ.: inertial navigation system) является альтернативой радару с фазированной антенной решеткой для определения положения и пространственного положения и синхронизации искусственно создаваемого изображения; это вопрос технологических достижений/стоимости и БЛА, работающих в горной местности.
Дополнительно БЛА оснащен следующим:
Приемопередатчик
Аварийный радиомаяк
Хвостовые (самосветящиеся) огни для предотвращения столкновений и посадочные огни (чтобы их было видно наземным командам)
Способ и инфраструктура 800
Время до реагирования имеет первостепенное значение при тушении лесных пожаров; находящиеся в воздухе горящие материалы не задерживаются противопожарными просеками, и они образуют вторичные возгорания, приводящие к созданию множества фронтов пожара. Даже при слабом ветре лесные пожары со временем расширяются экспоненциально из-за вторичных возгораний.
Раскрытые в настоящем документе способ и связанные с ним БЛА способны тушить пожары. Следует понимать, что есть окно возможностей, за пределами которого ресурсов станет недостаточно.
Инфраструктура, необходимая для минимизации времени до реагирования и обеспечения эффективной непрерывной работы, включает:
Сеть круглосуточного наблюдения, которая может включать от стационарных точек наблюдения, небольших дронов-роботов, работающих от удаленных платформ для индуктивной перезарядки, или БЛА типа «хищник» до спутников наблюдения.
Один или несколько дежурных круглосуточных региональных центров координации и управления, далее называемых «центром(-ами)». Специалисты по пожаротушению, удаленные пилоты и специалист по воздушному движению/связной, доступные круглосуточно в центрах.
Центры, оснащенные средствами связи с любым выделенным объектом наблюдения, аэродромом, наземным и летным экипажем и БЛА.
Центры, оборудованные панелями для дистанционного пилотирования нескольких БЛА одновременно, и по меньшей мере один самолет, оборудованный такими панелями управления для использования в сложных условиях, когда задержка низкоорбитальной связи становится фактором. Координатор рабочей зоны, «координатор», будет располагаться в центре, вблизи рабочей зоны или в воздухе, в зависимости от используемых способов связи.
Сеть аэродромов, распределенная для охвата пожароопасных районов. Местоположения, выбранные таким образом, чтобы каждый пожароопасный район мог обслуживаться с нескольких аэродромов.
Каждый аэродром обеспечен запасами воды и ингибиторов горения, топливом и средствами для погрузки и обслуживания приземлившихся БЛА и транспортеров для немедленной отправки.
Один или несколько транспортных самолетов, базирующихся на каждом аэродроме. По меньшей мере один транспортер, доступный по первому требованию (пилоты и наземная команда доступны, заправлен топливом, БЛА загружены в транспортер).
Чтобы обеспечить непрерывную работу для каждого транспортера, базирующегося на аэродроме, должно быть по меньшей мере три загрузки БЛА (загрузка означает максимальное количество БЛА, которое размещается в транспортере) в зависимости от этого аэродрома. Во время непрерывной работы, пока одна нагрузка находится на пути к месту пожара, одна возвращается, а одна обслуживается и готовится к быстрой погрузке в следующий доступный транспортный самолет.
Способ. Пример, представленный ниже, предполагает непрерывную работу.
Подготовка
Как показано на фиг. 12-a, приземлившиеся БЛА 100 поднимают с поля (подъемники 804, фиг. 12-b) и загружают на платформу для обслуживания и посадки, «платформу(-ы)» 820, которые снабжены подъемником и рельсом 827. БЛА 100 закрепляют на рельсе 827 в зажатом состоянии между верхним и нижним роликами тележек 801 и 803, как показано на подробном виде (фиг. 12-b).
После закрепления на платформе 820 БЛА проверяют на предмет того, находится ли он в состоянии готовности к отправке, и его обслуживают для следующей задачи.
Действия, характерные для БЛА, связанных с раскрытым способом, включают следующее.
Как показано на фиг. 10-b, пустой контейнер 500-e извлекают из грузового отсека 120. Откидную дверцу 551 открывают и электрический мотор 556 запускают посредством рабочего переключателя (не показан) для вращения катушек 552 и 553 в направлении извлечения пустого контейнера 500-e из грузового отсека 120.
Как показано на фиг. 7, 9, трос 600 проходит через стабилизирующую катушку 331, в то время как две стороны 331-L, 331-R катушки фиксируются вместе путем толкания держателя 333 вперед; затем держатель 333 (фиг. 9) отводят в крайнее переднее положение путем активации с помощью рабочего переключателя (не показан) привода 337 (фиг. 7).
Перед заполнением (крышки заливных горловин не показаны) материалом 501 для пожаротушения контейнер 500 снова герметично закрывают. Швы 521 (фиг. 11-a) застегивают, и нижние концы сжимают между двумя прижимными пластинами 526 и 527 (фиг. 11-a) механизма 525, после чего указанный механизм повторно взводят для следующего открывания.
Фюзеляж 110 (фиг. 3) разблокируется и складывается с помощью рабочего переключателя (не показан), запускающего электрические моторы 114 (фиг. 3, 7), и крылья 101 разблокируются и складываются с помощью приводов 104 (фиг. 4).
Как показано на фиг. 12-a, 12-b, БЛА загружают с платформ 820 в транспортер 900 с использованием направляющего рельса 837, который соединяет рельс 827 платформы с рельсом 907, предусмотренным в транспортном самолете 900. Перемещение БЛА вдоль рельсов выполняют вручную или за счет запуска мотора 802 (не показан), предусмотренного на тележке 801. Удерживание БЛА в фиксированном положении вдоль рельсов 827, 907 осуществляется тормозом (не показан), предусмотренным по меньшей мере на одной из тележек 801, 803. Контейнер 500 транспортируют к дверце 902 рампы транспортера 900 посредством тележки, которая не показана.
Альтернативный способ загрузки БЛА 100 в транспортер 900 заключается в их предварительной загрузке на стойку 840, как показано на фиг. 12-a. Стойка 840 вмещает столько БЛА, сколько может перевезти транспортер 900. В этом случае рельс 907 транспортера обозначен позицией 837 и предусмотрен на стойке 840.
Стойка ускоряет загрузку транспортера. Она также уменьшает количество адаптаций на транспортере 900, поскольку стойки для перевозки контейнеров с материалом для пожаротушения уже используются, в качестве модульной системы пожаротушения с воздуха (MAFFS - англ.: Modular Airborne FireFighting System), используемой на C130. Размещение, загрузка и закрепление стойки 840 в транспортере 900 должны быть общими с используемыми стойками типа MAFFS.
В качестве опции до взлета крылья 101 БЛА подняты в «дестабилизующее положение». Приводы 104 (фиг. 4) активируются для выталкивания крыльев 101 к некоторым защитным пластинам (схематически обозначены позицией 909 на фиг. 4), предусмотренным на стенках грузового отсека, чтобы предотвратить балансировку во время полета.
Защитные пластины 849 предусмотрены на стойках 840.
При непрерывной работе БЛА загружаются в транспортер 900 во время операций по подготовке транспортера к следующему полету.
Отправление в зону пожара осуществляется по приказу регионального центра и согласно плану полета, выпущенному центром.
По прибытию в зону без получения дальнейших инструкций - совершение полета в зоне ожидания на указанной высоте, чтобы собирать и передавать информацию для улучшения ситуационной осведомленности центра/координатора.
В любое время до взлета, во время полета или во время полета в зоне ожидания на указанной высоте, когда основная информация о маршруте возврата БЛА получена от центра, она автоматически (предпочтительно по беспроводной связи) загружается в навигационную систему 702. Основная информация включает:
- Курс после возврата, чтобы пересечь маршрут возврата и маршрут.
Инструкции задержки: зигзагообразные схемы и схемы полета в зоне ожидания и координаты, поскольку они могут потребоваться для приземления в заданное время.
Инструкции по посадке.
Фаза предварительного выпуска.
Выпуск нескольких БЛА в быстрой последовательности является ключом для достижения высокой скорости плотности доставки для тушения пожара или подавления вторичных возгораний.
Тормоз и мотор 802, предусмотренные на тележке 801 (фиг. 12-b), встроены в систему автоматизации выпуска.
Для команды предварительного выпуска задняя дверца 901 транспортера 900 открывается, если уже не открыта, крылья 101 самого заднего БЛА в самом заднем 100-R положении (фиг. 6) складываются обратно из их дестабилизующего положения, и тележка 801 (фиг. 12-b) откатывает БЛА назад, пока она не достигнет положения выпуска, в котором она упирается в стопорный механизм 908 (не показан), предусмотренный на рельсе 907. В положении выпуска крылья 101 поднимаются так высоко, как это допускает дверца 901 (фиг. 13)
Удаленный пилот назначается БЛА, готовому к выпуску, и он получает свою цель и инструкции от координатора. Пилот также автоматически получает временной промежуток для выпуска, выданный в соответствии со всеми другими транспортерами 900 x n (не показаны) и БЛА x n (не показаны), работающим в зоне.
Незадолго до выпуска в навигационную систему 702 БЛА 100-R загружают оставшуюся информацию о маршруте: время посадки, крейсерскую высоту(-ы), текущую высоту и GPS-координаты и, по меньшей мере, некоторые приблизительные координаты и высоту цели, выбранной координатором. Время посадки и крейсерская высота задаются для обеспечения расстояния от предыдущего БЛА, запущенного в той же зоне и использующего тот же маршрут возврата.
При команде на выпуск мотор 802 тележки 801, фиг. 7, запускается, стопорный механизм 908 высвобождается, и БЛА сталкивается с рельса 907 (фиг. 12-а), - момент, когда приводы 104 (фиг. 4) начинают полное развертывание крыльев.
Первоначально система 350 плавного нарастания нагрузки, фиг. 7, дает ротору лебедки 351, работающей при перегрузках, свободно отпускать трос 600 на предварительно определенную длину, а затем она начинает прикладывать крутящий момент до тех пор, пока трос не прекратит разматываться. В этот момент нагрузка на тросе равна движущей силе, которая нужна БЛА для поддерживания той же скорости, что и у транспортера 900.
БЛА 100 поднимается над спутной струей транспортера (фиг. 14-а), и аэродинамические тормоза 302 (фиг. 1) и 303 (фиг. 2) разворачиваются до тех пор, пока контейнер 500 не съезжает с платформы 902 транспортера 900.
Когда падение контейнера 500 с платформы 902 «ощущается» системой 350 плавного нарастания нагрузки, она отправляет сигнал и автопилот 701, который складывает тормоза 302 и 303, заставляет БЛА перейти в крутое пикирование, чтобы следовать за падающим контейнером, фиг.14-b, и она устанавливает низкий крутящий момент для лебедки, работающей при перегрузках, для защиты БЛА от нагрузок.
Низкий начальный крутящий момент/оттягивание троса приводит к разматыванию троса 600 с лебедки 351, работающей при перегрузках, а затем крутящий момент постепенно увеличивается до тех пор, пока направление не сменится на сматывание троса 600, подтягивая БЛА к падающему контейнеру 500, фиг. 14-с.
После того как расстояние между БЛА 100 и контейнером 500 достигает заданного значения, лебедка 351, работающая при перегрузках, прекращает вращаться, и навигационная установка 702 отдает команду автопилоту 701 повернуть БЛА на указанный курс и отрегулировать наклон пикирования для достижения цели и выводит для удаленного пилота сообщение «ваши органы управления», фиг. 14-d.
Следует отметить, что после того, как контейнер 500 падает с платформы 902, моторы 802 тележки 801 всех БЛА, оставшихся в транспортере 900, запускаются для приведения оставшихся БЛА в оптимальное положение с учетом массы и балансных характеристик транспортера.
Фаза пикирования
Удаленный пилот может изменить цель или изменить маршрут, чтобы приблизиться к цели. Во время этой фазы система 330 обеспечения устойчивости в пикировании (фиг. 7, 8-a, 8-b) работает как система автотриммирования в обычном самолете.
Если нет медленного спуска или горизонтального полета, двигатель 201, фиг. 1, не запускается. Если двигатель не запущен ранее (планирование или пикирование с неработающим двигателем), он запускается автоматически, что вызывается сбросом материала, и происходит переход в маневр возврата.
Снова подчеркнем, что одной из главных целей настоящего изобретения является способность работать в условиях отсутствия видимости.
Трехмерные карты местности возможных рабочих зон предварительно загружаются в навигационную систему 702 (фиг. 7).
В случае низкой или нулевой видимости, например ночью, пилот выводит на свой дисплей искусственно создаваемое изображение местности, и если сам пожар не виден из-за кучевых облаков или дыма, у него есть возможность наложить ИК-изображение на искусственно создаваемую местность.
На плоской почве координаты, используемые для генерации искусственно создаваемого изображения, предоставляются GNSS. Информация о высоте предоставляется радиовысотомером или радаром с фазированной антенной решеткой.
В горах точность искусственно создаваемого изображения имеет первостепенное значение для возврата, и именно в горах отражения могут ввести в заблуждение GPS и там, где радиовысотомер бесполезен.
Радар 715 с фазированной антенной решеткой и его процессор 716, фиг. 7, предусмотренные в предпочтительном варианте осуществления БЛА 100, используется для повышения точности искусственно создаваемого изображения. Координаты GNSS используются в качестве первого приближения для извлечения и работы на ограниченной области карты местности, хранящейся в навигационной системе. Горы по-прежнему обеспечивают преимущество узнаваемых точек, хороших опорных точек как для положения, так и для высоты. Из радара 715, 716 извлекается ограниченное количество соответствующих опорных точек, а затем соответствующее программное обеспечение накладывает те из них, которые лучше всего подходят, на трехмерной карте, и она исправляет положение и пространственное положение, и отображаемое искусственно создаваемое изображение.
Опять-таки, INS является альтернативой радару с фазированной антенной решеткой, в зависимости от топографии предполагаемой рабочей зоны БЛА и с учетом достижений технологии.
Фаза сброса материала
Согласно цели настоящего изобретения раскрытый способ и связанные БЛА охватывают все типы сброса материала, от высокого распыления/низкой плотности доставки до высокой скорости плотности доставки, включая сброс нескольких нагрузок на одну и ту же цель.
Эффективный способ тушения низкоэнергетических пожаров заключается в сбросе материала в полете по касательной над целью. Для пожаров с более высокой энергией плотность доставки увеличивается за счет снижения высоты, с которой сбрасывается материал. Преимущество раскрытого способа и БЛА заключается в том, что после сброса материала БЛА становится очень маневренным, что позволяет ему вернуться после достижения областей и низких высот, которые обычно недоступны при текущем пожаротушении с воздуха, например, фиг. 15.
Тем не менее, именно за счет способности бомбардировки с пикирования можно достигать высокой скорости плотности доставки, необходимой для тушения лесных пожаров высокой интенсивности, и это представлено более детально:
Специфические средства помощи для пилотирования доступны пилоту в режиме реального времени. На фиг. 16 представлен пример дисплея на панели управления удаленного пилота. Конкретное расположение и подробная информация не являются предметом настоящего изобретения. На дисплее 750 показан искусственно создаваемый вид 751, характерный для случая отсутствия видимости. Инфракрасное изображение накладывается на искусственно создаваемый вид, причем видны две близко расположенные горящие цели 752-1, 750-2. Такие близко расположенные цели выглядят как одна с высоты транспортера, и это объясняет важность раздельного решения удаленного пилота. Показано: пилот выбирает нижнюю цель 752-1 более высокой интенсивности, которая появляется в перекрестии 753.
Траектория возврата рассчитывается и обновляется в режиме реального времени посредством навигационной системы 702 с учетом скорости и пространственного положения БЛА в отношении препятствий, которые определяются для представления фактора, препятствий, которые представлены кривой 756. Кривая 755 определяет возможное расстояние от препятствий для максимальных перегрузок, максимальную мощность двигателя.
Область между кривыми 755 и 756 называется в данном случае «окно возможностей возврата» 760. Пикирование ниже, ближе к цели, сужает окно возможностей, и материал сбрасывается до его закрытия, прежде чем авария будет неизбежной. Если пилот медленно реагирует на закрытие окна, навигационная система автоматически запускает сброс материала и переходит к маневру возврата.
На фиг. 15 представлен упрощенный двухмерный пример бомбардировки с пикирования для достижения максимальной плотности доставки к труднодоступной цели.
БЛА переходит на траекторию A-B, крутого пикирования под углом α вдоль склона 860 горы. Все тормоза 302, фиг. 1, и 303, фиг. 2, полностью развернуты.
В точке B удаленный пилот инициирует сброс контейнера 500 и запуск двигателя 201.
После сброса удаленный пилот может в любое время переключиться на автономный режим.
После получения команды сброса, лебедка 351, работающая при перегрузках, фиг. 7, отпускает трос 600 на длину L, рассчитанную для достижения желаемой высоты H над целью (с учетом параболического гравитационного перепада δ) плюс запас безопасности ΔL, чтобы избежать нагрузок на БЛА 100. Достижение удлинения L инициирует сброс материала 501. Пластины 526 и 527, фиг. 11-a, механизма 525 раздвигаются, швы 521 открываются, и материал 501 сбрасывается.
Сразу после сброса материала лебедка 351, работающая при перегрузках, начинает затягивать опустошенный контейнер 500-e для хранения в грузовом отсеке 120 БЛА 100, как описано ранее.
Высвобождение троса 600 в точке B снижает силу при спуске, что приводит к замедлению БЛА 100, который в точке C достигает скорости, позволяющей достичь радиуса возврата R с самой низкой точкой D траектории на выбранной безопасной высоте S над местностью. В точке C тормоза 302, фиг. 1, и 303, фиг. 2, складываются.
Следует отметить, что БЛА 100 начинает возврат, не перевозя массу материала 501 и контейнера 500, что приводит к облегчению конструкции, способной выдерживать маневры с высокой перегрузкой.
В точке D автопилот 701 устанавливает двигатель 201 на максимальную мощность, и БЛА перемещается под углом β до тех пор, пока скорость не упадет до Vx в точке F, после чего двигатель устанавливается на максимально продолжительный режим, и подъем корректируется до максимального угла подъема и продолжается до достижения назначенной высоты возврата.
Обратный полет
Когда достигается предварительно запрограммированная высота возврата в крейсерском режиме, автопилот поворачивает БЛА на предварительно запрограммированный курс для пересечения маршрута возврата и устанавливает двигатель 201 на крейсерскую мощность.
После пересечения автопилот выбирает маршрут возврата, и навигационная система регулирует крейсерскую скорость так, чтобы добраться до аэродрома в предварительно запрограммированное время. Если скорость будет слишком низкой для стабильного полета, автопилот войдет либо в предварительно запрограммированную зигзагообразную схему или схему полета в зоне ожидания, либо в схему с зигзагообразным движением в зоне ожидания в заданных областях в зависимости от необходимой задержки.
Следует отметить, что прибытие в предварительно запрограммированное время обеспечивает непрерывную работу, а целевое время посадки включает запас безопасности, который обеспечивает своевременное прибытие, даже если это подразумевает дополнительные маневры, такие как зигзагообразная схема или схема полета в зоне ожидания.
Посадка
Автопилот 701, фиг. 7, останавливает двигатель 201, фиг. 7, и по сигналу от датчика приближения он осуществляет выравнивание на высоте 1,8-0,9 м (6-3 фута), пока сигнал предупреждения об остановке не приведет к развертыванию всех сегментов аэродинамических тормозов 302, фиг. 2, и БЛА касается поверхности земли износостойкими наконечниками 887 рулей 313 направления, фиг. 1, и он садится на переднее полозковое шасси 885, выдвинутое приводом/демпфером 886, фиг. 7, во время конечной фазы.
Приземлившиеся БЛА убирают с поля и обслуживают/подготавливают к следующей задаче, как описано выше.
Хотя настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления и реализации, настоящее изобретение не ограничивается такими иллюстративными описаниями. Например, способ и БЛА, раскрытые в настоящем изобретении, описаны в связи с пожаротушением, но очевидно, что тот же способ может использоваться в качестве безопасного и экономичного способа доставки материалов военного назначения в указанное место в зоне военных действий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного автоматизированного тушения пожаров и огнетушащий элемент для его осуществления | 2020 |
|
RU2749587C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ С ВОЗДУХА НА ЛЕСНЫЕ ПОЖАРЫ, ВРЕДНЫХ НАСЕКОМЫХ И АТМОСФЕРНЫЕ ЯВЛЕНИЯ | 2006 |
|
RU2378159C2 |
| СПОСОБ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ С ВОЗДУХА | 2021 |
|
RU2774909C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| СПОСОБ ТУШЕНИЯ ПОЖАРОВ И СРЕДСТВО ТУШЕНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2013 |
|
RU2536239C1 |
| СПОСОБ ТУШЕНИЯ ПОЖАРА И РАКЕТЫ-ОГНЕТУШИТЕЛИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193906C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2800045C1 |
| АВИАЦИОННОЕ СРЕДСТВО ПОЖАРОТУШЕНИЯ | 2004 |
|
RU2254153C1 |
| СИСТЕМА И СПОСОБ ТУШЕНИЯ ПОЖАРА | 2020 |
|
RU2744324C1 |
| ДИРИЖАБЛЬ ПОЖАРНЫЙ ПИКИРУЮЩИЙ | 2014 |
|
RU2573489C1 |











Изобретение относится к способу доставки материалов к выбранному местоположению. Для доставки материалов используют беспилотный летательный аппарат (БЛА), контейнер для транспортировки материалов, размещают БЛА в транспортном самолете, производят транспортировку БЛА в транспортном самолете в положение рядом с выбранным местоположением, назначают удаленного пилота с возможностью его связи с транспортным самолетом для управления БЛА, производят загрузку в навигационную систему БЛА маршрута, инструкций и определенных данных для возможности посадки на выбранном аэродроме, производят выпуск БЛА с транспортного самолета по команде от удаленного пилота, направляют БЛА к выбранному местоположению для сброса материалов. После сброса материалов производят операции по возврату на выбранный аэродром под управлением автопилота БЛА и его навигационной системы. Обеспечивается повышение оперативности тушения пожаров. 16 з.п. ф-лы, 16 ил.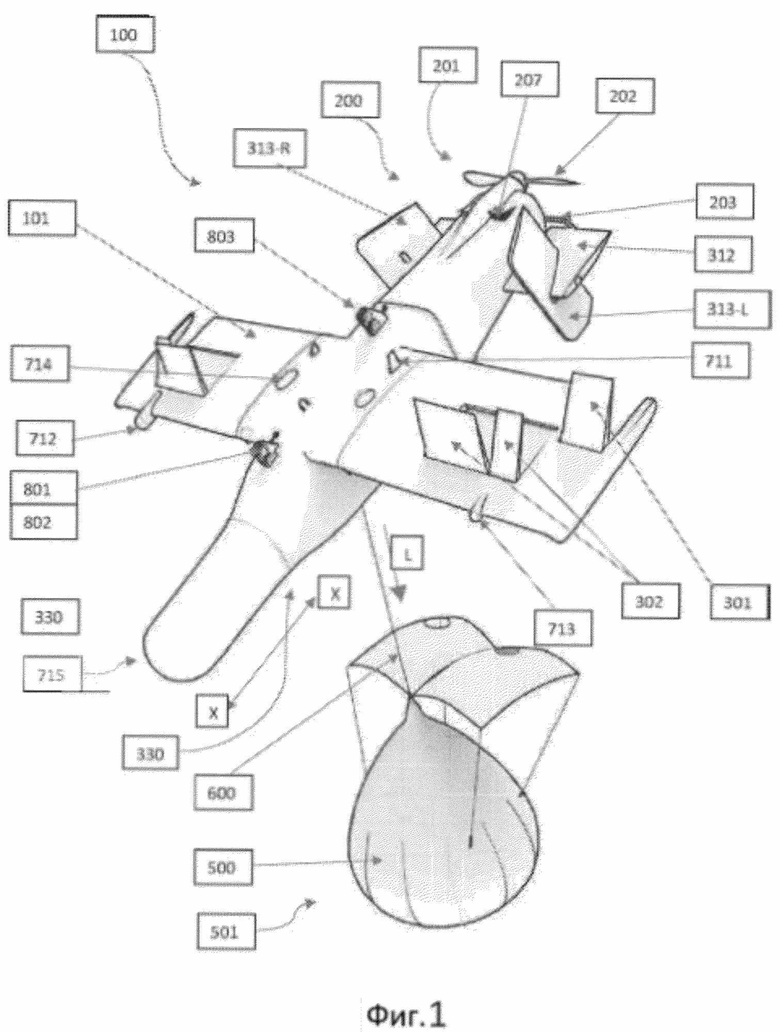
1. Способ доставки материалов к выбранному местоположению, включающий:
предоставление беспилотного летательного аппарата (БЛА), который содержит навигационную систему, систему автопилота и винтомоторную установку,
предоставление контейнера для транспортировки материалов, подлежащих сбросу в выбранном местоположении или возле него,
размещение в транспортном самолете БЛА, закрепленного с возможностью отсоединения относительно грузовой системы транспортного самолета,
транспортировку БЛА в транспортном самолете в положение рядом с выбранным местоположением,
назначение удаленного пилота для БЛА, причем указанный назначенный удаленный пилот взаимодействует с одной или более панелями управления, расположенными на транспортном самолете или в удаленном местоположении;
до выпуска БЛА с транспортного самолета загрузку маршрута и инструкций по посадке для по меньшей мере одного заданного аэродрома для навигационной системы БЛА,
до выпуска БЛА с транспортного самолета загрузку выбранного аэродрома из по меньшей мере одного заданного аэродрома в навигационную систему БЛА, обновление крейсерской высоты и указание времени приземления, что обеспечивает безопасный выпуск относительно других БЛА, ранее выпущенных над рабочей зоной, которая содержит выбранное местоположение, поскольку другие БЛА были направлены на тот же выбранный аэродром,
выпуск БЛА с транспортного самолета в положении над выбранным местоположением или возле него в ответ на команду от удаленного пилота,
направление БЛА к выбранному местоположению,
инициирование сброса материалов с БЛА,
перевод БЛА в маневр подъема и включение системы автопилота,
при достижении загруженной крейсерской высоты направление БЛА для пересечения с предварительно запрограммированным маршрутом в направлении выбранного аэродрома и принятие указанного пересекаемого маршрута, полет и посадку на выбранном аэродроме на основе навигационной системы, подключенной к автопилоту, предусмотренному на БЛА.
2. Способ по п. 1, дополнительно включающий предоставление множества БЛА, и причем множество БЛА размещают в одном или множестве транспортных самолетов для транспортировки в одно или более положений выше рабочей зоны или рядом с ней.
3. Способ по п. 1, отличающийся тем, что материалы выбирают из группы, состоящей из материала для пожаротушения, ингибитора горения и их комбинации, и причем рабочая зона включает в себя географическое местоположение, в котором горит по меньшей мере одна конструкция или участок с растительностью.
4. Способ по п. 1, отличающийся тем, что материалы выбирают из группы, состоящей из одного или более материалов военного назначения, и причем рабочая зона является зоной боевых действий.
5. Способ по п. 1, отличающийся тем, что БЛА содержит по меньшей мере одну складную конструкцию, выбранную из группы, состоящей из одного или более складных крыльев, одной или более складных стабилизирующих конструкций и плоскостей управления, складного фюзеляжа и любой их комбинации, и причем БЛА расположено в транспортном самолете с по меньшей мере одной складной конструкцией в сложенном положении.
6. Способ по п. 5, отличающийся тем, что по меньшей мере одну складную конструкцию БЛА разворачивают до выпуска.
7. Способ по п. 5, отличающийся тем, что по меньшей мере одну складную конструкцию БЛА разворачивают после выпуска.
8. Способ по п. 1, отличающийся тем, что материалы загружают в контейнер БЛА до размещения БЛА в транспортном самолете.
9. Способ по п. 1, отличающийся тем, что материалы загружают в контейнер БЛА после размещения БЛА в транспортном самолете.
10. Способ по п. 1, отличающийся тем, что материалы хранят в контейнере, расположенном за пределами фюзеляжа БЛА, в гибком контейнере, выполненном из непроницаемых материалов, прикрепленном к фюзеляжу БЛА кабелем или тросом.
11. Способ по п. 10, отличающийся тем, что материалы доставляют путем инициирования открывания одного или более непроницаемых для жидкости швов, предусмотренных на указанном гибком контейнере, за счет удаленного инициирования механизма высвобождения шва.
12. Способ по п. 10, отличающийся тем, что шкив, который поддерживает нагрузку кабеля или троса, несущего гибкий контейнер, продольно перемещается механизмом, предусмотренным на БЛА, в положение, необходимое для стабильного полета от горизонтального до крутого пикирования.
13. Способ по п. 10, отличающийся тем, что длина указанного кабеля или троса увеличивается или уменьшается на различные значения с различными скоростями и ускорениями с помощью средств, включающих шкив(-ы) и лебедку, предусмотренные на БЛА, причем указанные увеличение или уменьшение предназначены для корректировки в зависимости от условий полета, чтобы уменьшить перегрузки на БЛА и/или опустить гибкий контейнер, так что материал доставляется на меньшей высоте над выбранным местоположением.
14. Способ по п. 1, отличающийся тем, что информацию о высоте положения и пространственном положении БЛА, передаваемую глобальной навигационной спутниковой системой и указателем пространственного положения в навигационную систему БЛА и автопилот, проверяют/корректируют с помощью информации, подаваемой от радара с фазированной антенной решеткой, предусмотренного на БЛА, причем указанный радар проверяет соответствующие обнаруженные точки относительно тех же точек на трехмерной карте, загруженной в навигационную систему БЛА.
15. Способ по п. 1, отличающийся тем, что информацию о высоте положения и пространственном положении БЛА, передаваемую глобальной навигационной спутниковой системой и указателем пространственного положения в навигационную систему БЛА и автопилот, проверяют/корректируют с помощью информации, подаваемой от инерциальной навигационной системы (INS), предусмотренной на БЛА.
16. Способ по п. 1, отличающийся тем, что сброс материалов инициируется системой предупреждения о близости цели или земли, предусмотренной на БЛА.
17. Способ по п. 1, отличающийся тем, что сброс материалов инициируется процедурой расчета траектории возврата, предусмотренной на навигационной системе БЛА.
| Авиационный комплекс обнаружения и тушения очагов возгорания и способ его применения | 2017 |
|
RU2674640C1 |
| БЕСПИЛОТНЫЕ АВИАЦИОННЫЕ СИСТЕМЫ ДЛЯ БОРЬБЫ С ПОЖАРАМИ | 2013 |
|
RU2585557C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2006 |
|
RU2315346C1 |
| Установка для получения талой воды за счёт утилизации холода сжиженного природного газа | 2016 |
|
RU2651139C2 |
| CN 107875540 A, 06.04.2018. | |||

