Изобретение относится к ряду областей промышленности, где находит применение дистанционное управление одним или несколькими подвижными техническими объектами различного назначения: наземными, воздушными, водными аппаратами и устройствами, например роботами (беспилотными летательными аппаратами). В частности, изобретение может быть использовано в авиационной технике для доставки с повышенной точностью полезного груза с высоколетящего самолета-носителя в заданные точки местности, для ликвидации каких-либо преград и заторов в экстремальных ситуациях, при стихийных бедствиях и т.д.
Известен способ дистанционного управления объектами (Россия, изобретение, патент №2032942 С1, МПК 6 G08C 15/06, публ. 1995.04.10), включающий формирование сигнала управления, модуляцию сформированными сигналами управления несущего сигнала передатчика, передачу модулированного сигнала по линии связи на управляемый объект, демодуляцию принятых сигналов и подачу демодулированных сигналов управления на заранее определенные исполнительные механизмы управляемого объекта.
Недостатком такого способа является необходимость обмена информацией между управляемым объектом и системой управления (наличие обратной связи). Для организации обратной связи формируют сигналы индикации заранее заданных состояний в работе управляемого объекта с помощью установленных на нем датчиков, что усложняет конструкцию управляемого объекта.
Известен способ дистанционного управления группой объектов (Россия, изобретение, патент №2251656, МПК 7 F42В 25/00, F41G 9/02, публ. 2005.05.10), реализованный в устройстве управления корректируемого летательного аппарата. Известный способ характеризуется тем, что перед спуском нескольких корректируемых летательных аппаратов осуществляют генерацию импульсов для маркировки (обозначения местоположения) ориентиров вблизи заданных точек спуска, принимают отраженные от ориентиров импульсы и производят их обработку (фильтрацию). Однако для осуществления известного способа необходимо согласовать характерные особенности способа генерации и способа фильтрации импульсов.
Наиболее близким аналогом к предлагаемому является способ управления полетом корректируемого летательного аппарата (Россия, изобретение, патент №2192604 С1, МПК F41G 7/20, публ. 2002.11.10). Сущность известного способа заключается в том, что перед спуском корректируемого летательного аппарата в район заданной точки доставки груза сбрасывают устройства, выполняющие функции ориентира, которые после достижения земной поверхности по команде, поступающей с самолета-носителя корректируемого летательного аппарата, излучают импульсы в течение промежутка времени, длительность которого закодирована в этой команде. Такой способ повышает точность наведения одного или нескольких совместно спускаемых корректируемых летательных аппаратов на малоконтрастный и слабоосвещенный участок местности, отмеченный световыми импульсами ориентира. Однако данный способ не обеспечивает одновременную доставку груза несколькими корректируемыми летательными аппаратами в разные точки местности, отмеченные ориентирами: при наличии в поле зрения корректируемого летательного аппарата нескольких близко расположенных ориентиров корректируемый летательный аппарат не может выделить «свой» ориентир. Кроме того, одновременный приход в систему управления корректируемого летательного аппарата импульсов от разных ориентиров может вызвать сход корректируемых летательных аппаратов с траектории полета.
Задачей заявленного способа является расширение возможностей дистанционного управления подвижными объектами.
Поставленная задача может быть решена благодаря тому, что в известном способе, включающем генерацию, по меньшей мере, одним источником излучения серии импульсов для маркировки, по меньшей мере, одного ориентира, прием и фильтрацию отраженных импульсов в единой системе отсчета времени излучения и приема, для каждого подвижного объекта осуществляют генерацию серии импульсов, маркирующих ориентир, с индивидуальными характеристиками и временным сдвигом цикла излучения, исключающим наложение импульсов разных серий, при этом начала отсчета времени на всех источниках излучения синхронизируют.
Генерация серии маркирующих импульсов с индивидуальными характеристиками и временным сдвигом цикла излучения, исключающим наложение импульсов разных серий, осуществляемая по меньшей мере одним источником излучения для маркировки по меньшей мере одного ориентира, прием и фильтрация отраженных импульсов в единой системе отсчета времени излучения и приема, а также синхронизация начала отсчета времени на всех источниках излучения исключают неадресный прием импульсов каждым подвижным объектом, в том числе в условиях помех, и одновременный приход импульсов от разных ориентиров в систему управления подвижного объекта при нахождении одного или нескольких подвижных объектов в зоне действия одного или нескольких источников излучения.
Технический результат - повышение надежности и точности управления подвижными объектами при одновременном их спуске в разные точки местности, отмеченные ориентирами.
Предлагаемый способ реализуется с помощью алгоритма, отражающего этапы синтеза и фильтрации серий маркирующих импульсов:
1. Формируют серию временных «окон» излучения (временных промежутков, в течение которых излучение маркирующего импульса разрешено):
- определяют ширину «окна» излучения по формуле
где N - количество одновременно маркируемых ориентиров;
ƒ - средняя частота следования маркирующих импульсов для одного ориентира;
Δt - длительность безызлучательного промежутка (временного промежутка, в течение которого излучение запрещено);
- задают цикл повторения «окна» излучения.
2. Для каждого ориентира осуществляют временной сдвиг сформированной по п.1 серии временных «окон» излучения на величину
(TОКН+Δt)·(n-1),
где n=1...N - порядковый номер ориентира, что исключает наложение соседних «окон» (а следовательно, маркирующих импульсов из разных серий) и обеспечивает разделение «окон» излучения безызлучательными промежутками длительностью Δt.
3. Для каждого ориентира осуществляют временной сдвиг момента излучения маркирующего импульса внутри соответствующего «окна» сформированной по п.1, 2 серии на величину, задаваемую законом:

где i - порядковый номер «окна» и соответствующего маркирующего импульса в серии для данного ориентира;
 - целая часть отношения
- целая часть отношения  ;
;
δА - задаваемый параметр, обеспечивающий индивидуальность серии маркирующих импульсов (каждому ориентиру ставится в соответствие свое значение δА);
z - рассчитываемый параметр, принимает целые значения. Величина z определяется значениями δА и ТОКН. Введение параметра z связано с наличием «окон» излучения.
4. На каждом подвижном объекте производят фильтрацию принятых сигналов, результатом которой является выделение по заданному признаку импульсов для данного подвижного объекта и определение момента прихода очередного импульса. При этом заданным признаком является последовательность значений промежутков между импульсами, соответствующая закону излучения (1) с заданным для данного подвижного объекта значением δА.
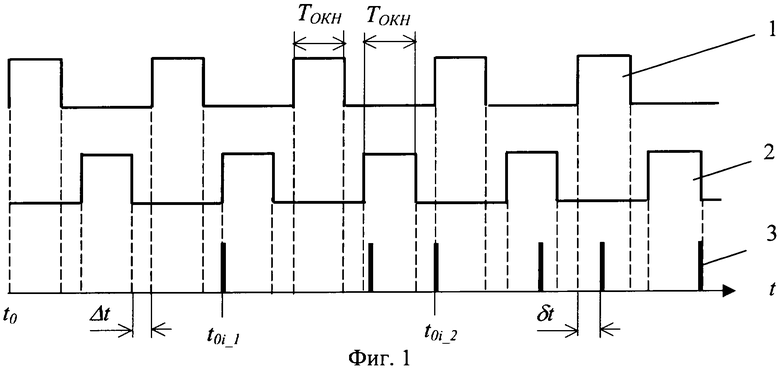
На фиг.1 приведена временная диаграмма формирования одним источником излучения серии маркирующих импульсов, где
1 - набор временных «окон» излучения маркирующих импульсов для 1-го ориентира;
2 - набор временных «окон» излучения маркирующих импульсов для 2-го ориентира;
3 - маркирующие импульсы для 2-х ориентиров;
t - отсчет времени на источнике излучения;
t0 - начало отсчета времени на источнике излучения;
t0i_1 - начало излучения серии маркирующих импульсов для 1-го ориентира;
t0i_2 - начало излучения серии маркирующих импульсов для 2-го ориентира;
Δt - длительность безызлучательного промежутка;
ТОКН - ширина временного «окна» излучения;
δt - временной сдвиг импульса в соответствующем «окне» излучения.
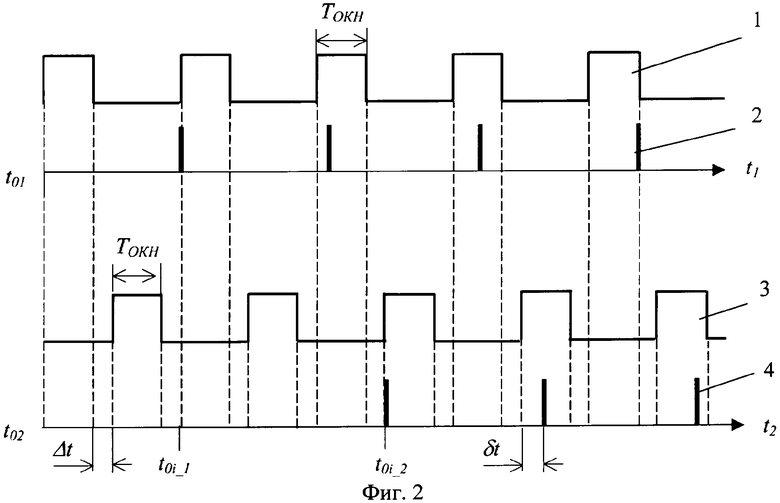
На фиг.2 приведена временная диаграмма формирования двумя источниками излучения с синхронизированными началами отсчета времени двух серий маркирующих импульсов, где
1 - набор временных «окон» излучения маркирующих импульсов для 1-го ориентира;
2 - маркирующие импульсы для 1-го ориентира;
3 - набор временных «окон» излучения маркирующих импульсов для 2-ого ориентира;
4 - маркирующие импульсы для 2-го ориентира;
t1 - отсчет времени на 1-м источнике излучения;
t2 - отсчет времени на 2-м источнике излучения;
t01, t02 - начала отсчета времени на 1-м и на 2-м источниках излучения, t01=t02;
t0i_1 - начало излучения серии маркирующих импульсов для 1-го ориентира;
t0i_2 - начало излучения серии маркирующих импульсов для 2-го ориентира;
Δt - длительность безызлучательного промежутка;
ТОКН - ширина временного «окна» излучения.
В качестве примера реализации предлагаемого способа рассмотрим способ управления двумя беспилотными летательными аппаратами (БПЛА), обеспечивающими доставку полезного груза в заданные точки пространства по ориентирам, замаркированным импульсами одного источника излучения, установленного на самолете-носителе БПЛА (фиг.1).
Перед вылетом задаются двумя значениями параметры δА (соответствующее им значения второго параметра z рассчитываются), и в систему управления источника излучения вводят оба значения, в системы управления БПЛА - по одному.
После выхода в район доставки груза на самолете-носителе и обоих БПЛА одновременно включают отсчет времени. Определяют ориентиры вблизи заданных точек сброса груза. Наводят ось излучения на 1-й ориентир и излучают 1-й импульс серии импульсов, маркирующих 1-й ориентир. С помощью известного устройства (дефлектора) переключают направление оси излучения на 2-й ориентир и излучают 1-й импульс серии импульсов, маркирующих 2-й ориентир. Затем снова переключают направление оси излучения на 1-й ориентир и излучают 2-й импульс серии импульсов, маркирующих 1-й ориентир, и т.д. В этом случае один источник излучения осуществляет генерацию 2-х разных серий маркирующих импульсов в соответствии с пп.1-3 приведенного выше алгоритма. При этом временные сдвиги маркирующих импульсов по п.3 алгоритма определяются законом излучения (1): для 1-го ориентира - с одним значением параметра δА, для 2-го ориентира - с другим.
Далее на каждом БПЛА открывают фотоприемное устройство и в течение заданного времени осуществляют прием отраженных импульсов. При этом помимо импульсов, отраженных от «своего» ориентира, в принятой последовательности в общем случае могут содержаться импульсы, отраженные от «чужого» ориентира, а также импульсы активных помех. Производят обработку (фильтрацию) принятых импульсов по п.4 алгоритма, выделяют те импульсы, промежутки между которыми соответствуют закону излучения (1) со значением параметра δA, заложенным в систему управления данного БПЛА. По выделенным импульсам, маркирующим «свой» ориентир, осуществляют вывод БПЛА в заданную точку местности.
Другим примером реализации предлагаемого способа является способ управления двумя БПЛА, обеспечивающими доставку полезного груза в разные точки пространства по двум ориентирам, замаркированным излучением двух наземных источников излучения (фиг.2).
Отличием этого варианта реализации предложенного способа является то, что изначально в систему управления каждого источника излучения вводят свое значение параметра δА, а начала отсчета времени на двух источниках излучения синхронизируют. Определяют ориентиры, и каждый источник излучения генерирует только одну серию маркирующих импульсов для «своего» ориентира в соответствии с пп.1-3 приведенного алгоритма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МОНИТОРИНГЕ ГОРОДСКОЙ ЗАСТРОЙКИ | 2021 |
|
RU2765758C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ КОРРЕКТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192604C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2414721C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Способ защиты вооружения и военной техники от корректируемых авиационных боеприпасов, применяемых ударным беспилотным летательным аппаратом | 2023 |
|
RU2827648C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2824851C1 |
Изобретение относится к ряду областей промышленности, где находит применение дистанционное управление одним или несколькими подвижными техническими объектами различного назначения: наземными, воздушными, водными аппаратами и устройствами, например, роботами (беспилотными летательными аппаратами). В частности, изобретение может быть использовано в авиационной технике для доставки с повышенной точностью полезного груза с высоколетящего самолета-носителя в заданные точки местности. Технический результат - повышение надежности и точности управления подвижными объектами при одновременном их спуске в разные точки местности, отмеченные ориентирами. Согласно способу осуществляют генерацию, по меньшей мере, одним источником излучения серии импульсов для маркировки, по меньшей мере, одного ориентира, прием и фильтрацию отраженных импульсов в единой системе отсчета времени излучения и приема. Для каждого подвижного объекта осуществляют генерацию серии импульсов, маркирующих ориентир, с индивидуальными характеристиками и временным сдвигом цикла излучения, исключающим наложение импульсов разных серий, при этом начало отсчета времени на всех источниках излучения синхронизируют. 2 ил.
Способ дистанционного управления подвижными объектами, включающий излучение несколькими источниками серий импульсов для маркировки нескольких ориентиров, прием и фильтрацию импульсов на подвижных объектах, отличающийся тем, что излучают серию импульсов, маркирующих ориентир, для каждого подвижного объекта, причем излучения осуществляют с временным сдвигом, исключающим наложение импульсов разных серий, при этом на подвижных объектах принимают отраженные от ориентиров импульсы, а начало отсчета времени на всех источниках излучения и прием отраженных импульсов синхронизируют по времени.
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ КОРРЕКТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192604C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| DE 3338191 A1, 04.02.1988 | |||
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| US 4898341 A, 06.02.1990 | |||
| US 4381090 A, 26.04.1983. | |||

