Группа изобретений относится к области медицины, может быть использована для лечения и реабилитации пациентов, страдающих патологиями, приводящими к частичному обездвижению, нарушению способности держать равновесие, для пациентов с мышечными атрофиями, контрактурами, травмами спинного и головного мозга, детским церебральным параличом (ДЦП), с нарушениями опорно-двигательного аппарата. Данное изобретение также относится к физкультурно-оздоровительному и спортивному инвентарю, предназначенному для проведения спортивных занятий и лечебной гимнастики как в тренажерных и фитнес залах, так и в домашних условиях для здоровых людей и спортсменов.
Известен Складной биокинетический лыжный тренажер Ахметова для укрепления опорно-двигательной системы (патент РФ №2714549 от 16.05.2019, опубликован 18.02.2020) для выполнения качающихся движений для рук и скользящих шагающих движений для ног. Занятия на складном биокинетическом лыжном тренажере обеспечивают тренирующемуся два положительных фактора - тренировочный эффект, получаемый при хождении на лыжах, плюс тренировочный эффект при занятиях на биокинетическом тренажере при горизонтальном свободном положении позвоночника с опорой на четыре конечности. Что позволяет эффективно разрабатывать и укреплять позвоночный столб и всю опорно-двигательную систему в комплексе.
Недостатками известного устройства являются:
- применение для укрепления мышц и суставов конечностей мало ограниченных и здоровых людей, тогда как в заявляемом изобретении имеется возможность разрабатывать мышцы и суставы (верхних, нижних конечностей и туловища) от инвалидов и людей с ограниченными возможностями здоровья (есть возможность работать только руками - стоя или сидя на переносном стуле), имеющих значительные функциональные физические ограничения, и до здоровых людей и спортсменов;
- известный лыжный тренажер Ахметова, не имеет возможности создать дополнительное сопротивление при работе, а в заявленном имеются петли для крепления резиновых эспандеров для создания дополнительных сильных нагрузок (рук и ног отдельно), что повышает его эффективность;
- в известном устройстве всего одна горизонтальная ручка для работы руками, тогда как в заявленном две - горизонтальные и вертикальная (причем вращающиеся вокруг своей оси, позволяющие избежать травмирование суставов), что также увеличивает количество прорабатываемых мышц и функционал тренажера.
- нет бортиков на ногоступах, что повышает возможность соскальзывания ног пациентов во время тренировки, а в заявленном данные бортики в наличии, что делает тренажер безопасным для категории людей, имеющих функциональные ограничения;
Известен Тренажер для реабилитации пациентов с нарушениями опорно-двигательного аппарата ЛЫЖИ и способ его применения, содержит переднюю и заднюю П-образные опоры для рук, горизонтальную платформу с направляющими и каретки для размещения на них стоп пациентов, выполненные с возможностью перемещения по направляющим горизонтальной платформы. Опоры для рук содержат основание и пару вертикально-ориентированных стоек с установленными на них с возможностью регулирования по высоте С-образными рукоятками. Опоры для рук перпендикулярно закреплены своими основаниями на горизонтальной платформе. Направляющие горизонтальной платформы выполнены с возможностью установки на них и перемещения по ним трех типов кареток. Способ реабилитации пациентов осуществляется с помощью тренажера и заключается в выполнении упражнений трех типов. При выполнении упражнения первого типа пациент, стоя на каретках первого типа, держась руками за рукоятки, передвигает одну или две ноги вперед-назад вдоль направляющих горизонтальной платформы. При выполнении упражнения второго типа пациент, стоя на каретках второго типа, держась руками за рукоятки, передвигает одну или две ноги влево-вправо вдоль направляющих горизонтальной платформы. При выполнении упражнения третьего типа пациент, стоя на каретке третьего типа, держась руками за рукоятки, одновременно передвигает обе ноги с тазовой областью влево-вправо вдоль направляющих горизонтальной платформы. Достигается повышение вариативности изменения нагрузки, прилагаемой к различным группам мышц туловища, рук, ног и суставов в процессе тренировки. Группа изобретений относится к медицине, а именно к тренажерам и способам реабилитации пациентов с нарушениями опорно-двигательного аппарата (патент РФ №2751742 от 04.06.2021, опубликован 16.07.2021).
Недостатками известной модели являются:
- известный тренажер не имеет передвижные ручки для работы руками, тогда как в заявленном, имеются рукоятки широкого диапазона длины хода, содержащие в себе две пары ручек (горизонтальные и вертикальные) при помощи которых можно одновременно (либо отдельно, либо только руками) работать с ногами, что повышает его эффективность.
Техническим результатом настоящего изобретения является повышение эффективности тренажера для реабилитации пациентов с нарушениями опорно-двигательного аппарата за счет увеличения его функциональных возможностей путем обеспечения возможности перемещения рукояток для рук с различным хватом для разработки мышц и суставов рук одновременно с мышцами и суставами ног, а также возможности регулировки диапазона перемещения указанных рукояток.
В итоге, заявляемый тренажер обеспечивает:
- настройку под рост пациента,
- хорошую физическую нагрузку практически на все основные группы мышц и суставы пациента,
- хорошую проработку и укрепление мышц и суставов позвоночного столба и всей опорно-двигательной системы в комплексе,
- тренировку дыхательной и сердечно-сосудистой системы,
- восстановление естественной координации движений,
- тренировку вестибулярного аппарата и чувства пространственной ориентации.
Указанный технический результат достигается тем, что тренажер для реабилитации пациентов с нарушениями опорно-двигательного аппарата, содержит горизонтальную платформу с направляющими, на которой перпендикулярно закреплены передняя и задняя П-образные опоры для рук, ориентированные вдоль горизонтальной платформы, ногоступы для размещения на них стоп пациента, выполненные с возможностью перемещения по направляющим горизонтальной платформы, и переднюю и заднюю Г-образные рукоятки. Каждый из ногоступов снабжен четырьмя колесами, имеющими пазы для перемещения по направляющим горизонтальной платформы. Горизонтальная платформа содержит передвижные упоры для регулировки длины хода ногоступов по направляющим горизонтальной платформы. Ногоступы с двух противоположных сторон снабжены резиновыми амортизаторами и ушками ногоступов, причем ушки ногоступов выполнены с возможностью прикрепления к ним концов резиновых эспандеров для создания сопротивления ногоступам при их перемещении по направляющим горизонтальной платформы. Горизонтальная платформа содержит ушки горизонтальной платформы, которые выполнены с возможностью прикрепления к ним других концов резиновых эспандеров. Ногоступы снабжены бортиками для предотвращения проскальзывания стоп пациентов. Каждая передняя и задняя П-образная опора для рук состоит из пары вертикальных стоек, причем на каждой паре вертикальных стоек передней и задней П-образных опор закреплена с возможностью регулирования по высоте вертикальных стоек соответствующая передняя и задняя горизонтальная направляющая планка, ориентированная вдоль горизонтальной платформы. Передняя и задняя Г-образные рукоятки выполнены с возможностью перемещения по передней и задней горизонтальной направляющей планке соответственно. Каждая Г-образная рукоятка выполнена в виде корпуса, на котором закреплены четыре колеса таким образом, что при перемещении Г-образных рукояток по направляющим планкам П-образных опор два из четырех колес расположены сверху направляющей планки, а другие два колеса расположены снизу направляющей планки. Каждое колесо выполнено с пазом для направляющей планки. На корпусе каждой Г-образной рукоятки установлены ориентированные перпендикулярно друг другу горизонтальная и вертикальная ручки, выполненные с возможностью вращения относительно своих осей. Передняя и задняя направляющие планки содержат фиксаторы, выполненные с возможностью регулировки длины хода Г-образных рукояток вдоль направляющих планок. Тренажер содержит резиновые эспандеры для создания сопротивления Г-образным рукояткам при их перемещении вдоль направляющих планок, причем один конец эспандера привязан к Г-образной рукоятке, а другой конец эспандера привязан к отверстию в направляющей планке, по которой перемещается Г-образная рукоятка.
Способ реабилитации пациентов с нарушениями опорно-двигательного аппарата, осуществляемый с помощью тренажера, заключается в выполнении упражнения, при котором пациент, стоя на ногоступах тренажера и держась руками за вертикальные или горизонтальные ручки Г-образных рукояток, передвигает ногами или одной ногой вперед-назад вдоль направляющих горизонтальной платформы, и передвигает руками или одной рукой вперед-назад вдоль горизонтальных направляющих планок П-образных опор, закрепленных на горизонтальной платформе.
Другой вариант способа реабилитации пациентов с нарушениями опорно-двигательного аппарата, осуществляемый с помощью тренажера, заключается в выполнении упражнения, при котором пациент, стоя на горизонтальной платформе или сидя на переносном сиденье, держась руками за вертикальные или горизонтальные ручки Г-образных рукояток, передвигает руками или одной рукой вперед-назад вдоль горизонтальных направляющих планок П-образных опор, закрепленных на горизонтальной платформе.
Изобретение обеспечивает возможность проработки и разработки большого количества групп мышц человека, верхних и нижних конечностей, суставов. Данный тренажер дает возможность реабилитироваться как инвалидам и людям с ограниченными возможностями здоровья, имеющим значительные функциональные ограничения, так и здоровым людям и спортсменам, создавая различные виды нагрузок - регулировка по длине горизонтальной платформы посредством упоров, плюс дополнительная нагрузка через резиновые эспандеры (как на ноги, так и на руки отдельно). Регулировка высоты и длины хода рукоятки для рук позволяет охватить разные возрастные категории людей, а также людей имеющих различные физические функциональные ограничения, тем самым увеличивая функционал и применимость тренажера.
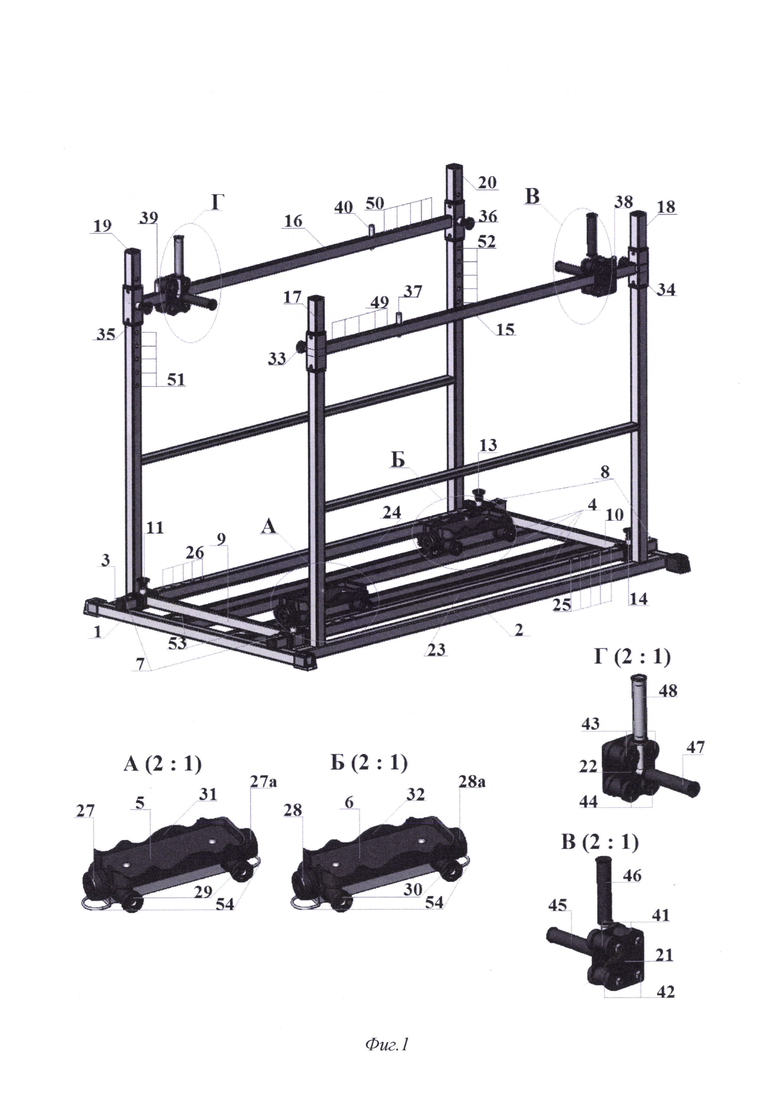
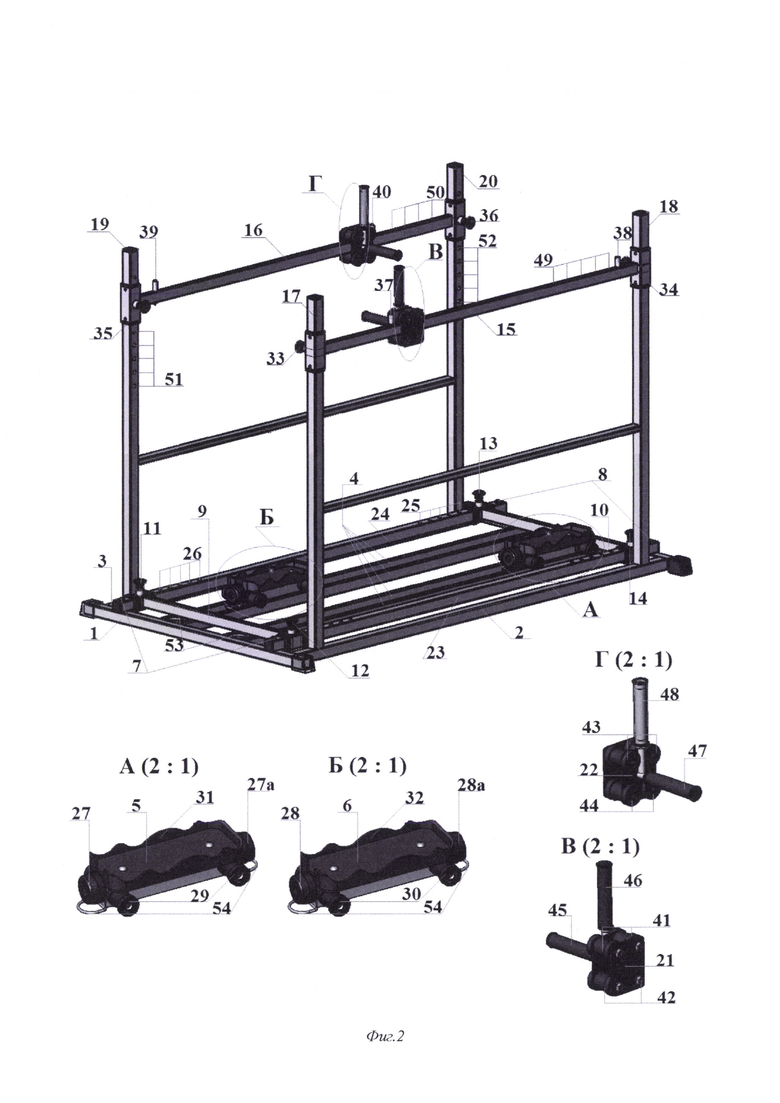
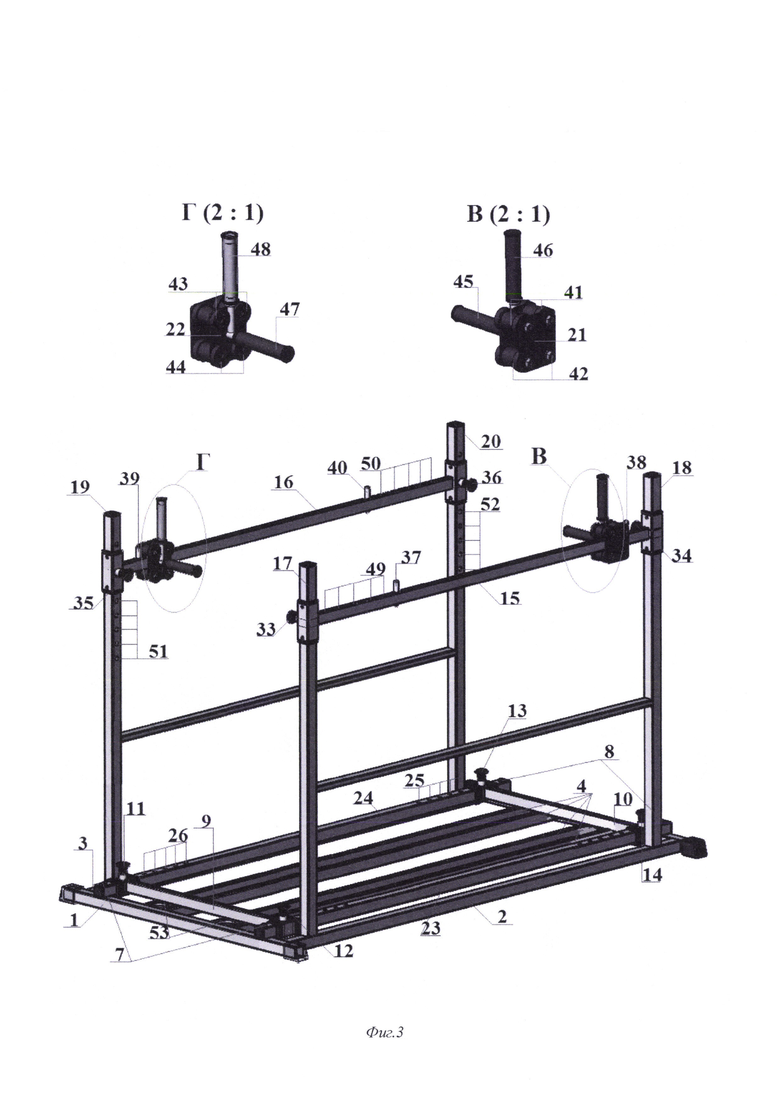
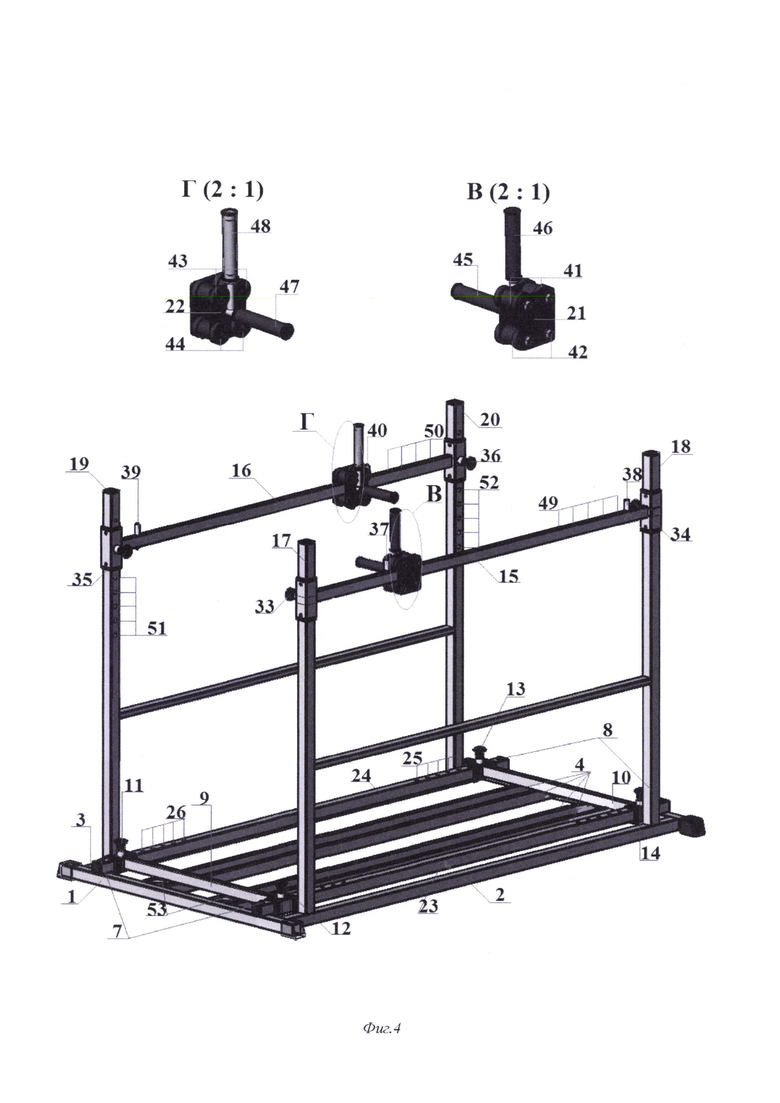
На фиг. 1, 2, 3, 4 представлены схемы тренажера ЛЫЖНИК и использованы следующие обозначения:
А, Б - подфигуры отдельных элементов ногоступов 5, 6 для классического хода вперед-назад, которые иллюстрируют его детали в увеличенном размере (масштаб 2:1);
В - подфигура отдельных элементов передней Г-образной рукоятки 21 - держателя для рук, для передвижения рук вперед-назад, которые иллюстрируют его детали в увеличенном размере (масштаб 2:1);
Г - подфигура отдельных элементов задней Г-образной рукоятки 22 - держателя для рук, для передвижения рук вперед-назад, которые иллюстрируют его детали в увеличенном размере (масштаб 2:1);
1 - горизонтальная платформа;
2 - передняя П-образная опора для рук;
3 - задняя П-образная опора для рук;
4 - направляющие горизонтальной платформы для передвижения ногоступ;
5, 6 - ногоступы для классического хода вперед-назад;
7, 8 - фиксирующие болты крепления передней и задней балок для регулируемых упоров длины хода ногоступов горизонтальной платформы;
9 - левый регулируемый упор длины хода ногоступов горизонтальной платформы;
10 - правый регулируемый упор длины хода ногоступов горизонтальной платформы;
11, 12 - регуляторы левого упора длины хода ногоступов горизонтальной платформы;
13, 14 - регуляторы правого упора длины хода ногоступов горизонтальной платформы;
15 - регулируемая по высоте передняя горизонтальная направляющая планка для перемещения вперед-назад Г-образной рукоятки - держателя для рук;
16 - регулируемая по высоте задняя горизонтальная направляющая планка для перемещения вперед-назад Г-образной рукоятки - держателя для рук;
17, 18 - вертикальные стойки передней П-образной опоры для перемещения вперед-назад Г-образной рукоятки - держатель для рук;
19, 20 - вертикальные стойки задней П-образной опоры для перемещения вперед-назад Г-образной рукоятки - держатель для рук;
21 - передняя Г-образная рукоятка - держатель для рук, для передвижения рук вперед-назад;
22 - задняя Г-образная рукоятка - держатель для рук, для передвижения рук вперед-назад;
23, 24 - передняя и задняя балки для регулирования упоров длины хода ногоступов горизонтальной платформы;
25, 26 - отверстия, регулирующие длину хода ногоступов горизонтальной платформы, расположенные на левой и правой части передних и задних балок;
27, 28 - передние амортизаторы ногоступов 5, 6 для классического хода вперед-назад;
27а, 28а - задние амортизаторы ногоступов 5, 6 для классического хода вперед-назад;
29, 30 - колеса ногоступов 5, 6 для классического хода вперед-назад;
31, 32 - бортики ногоступов для предотвращения соскальзывания ног пациента во время занятий;
33, 34 - регуляторы высоты передней планки для перемещения вперед-назад Г-образной рукоятки - держателя для рук тренажера;
35, 36 - регуляторы высоты задней планки для перемещения вперед-назад Г-образной рукоятки - держателя для рук тренажера;
37, 38 - фиксаторы, регулирующие перемещения длины хода передней Г-образной рукоятки - держателя для рук при передвижении рук вперед-назад;
39, 40 - фиксаторы, регулирующие длины хода задней Г-образной рукоятки - держателя для рук при передвижении рук вперед-назад;
41, 42 - верхние и нижние роликовые колеса передней Г-образной рукоятки - держателя для рук при передвижении вперед-назад по планке;
43, 44 - верхние и нижние роликовые колеса задней Г-образной рукоятки - держателя для рук при передвижении вперед-назад по планке;
45 - горизонтальные ручки передней Г-образной рукоятки - держателя для рук;
46 - вертикальные ручки передней Г-образной рукоятки - держателя для рук;
47 - горизонтальные ручки задней Г-образной рукоятки - держателя для рук;
48 - вертикальные ручки задней Г-образной рукоятки - держателя для рук;
49, 50 - отверстия, регулирующие длину хода передней и задней Г-образных рукояток - держателей для рук, расположенных на левой и правой части передних и задних планках;
51, 52 - отверстия, регулирующие по высоте переднюю и заднюю планки для перемещения вперед-назад Г-образных рукояток - держатели для рук, которые имеются на всех вертикальных стойках П-образных опоров;
53 - ушки для крепления резиновых эспандеров для создания дополнительной нагрузки, расположены на левой и правой стороне горизонтальной платформы;
54 - ушки для крепления резиновых эспандеров для создания дополнительной нагрузки на ногоступах, распложенных под амортизаторами.
На фиг. 1 и 2 представлена схема работы тренажера при работе ногами и руками вперед-назад.
Передняя 2 и задняя 3 П-образные опоры для рук перпендикулярно закреплены на горизонтальную платформу 1. Стоя на ногоступах 5, 6 для классического хода, держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, пациент попеременно или одновременно передвигает ногами и руками, либо одной ногой или рукой вперед-назад (имитируя ходьбу лыжника классическим ходом). Передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, имеют горизонтальные 45, 47 и вертикальные 46, 48 ручки и перемещаются вперед-назад по регулируемым по высоте передним 15 и задним 16 планкам, благодаря наличию верхних 41, 43 и нижних 42, 44 колес. Ногоступы 5, 6 перемещаются вперед-назад по направляющим 4 горизонтальной платформы 1 благодаря наличию колес 29, 30.
Для предотвращения жестких ударов во время движения ногоступов вперед-назад об упоры 9, 10 на ногоступах 5 и 6 для классического хода, имеются передние 27, 28 и задние 27а, 28а амортизаторы.
С двух сторон горизонтальной платформы 1 имеются два упора, левый 9 и правый 10, которые регулируют длину хода ногоступов регуляторами упоров левого 11, 12 и правого 13, 14 через отверстия 25 и 26, расположенных на передней 23 и задней 24 балках (закрепленных болтами на горизонтальную платформу 1 при помощи фиксирующих болтов 7, 8), во время передвижения пациента ногами вперед-назад по направляющим 4 в зависимости от функциональных ограничений пациента, а также дм создания нагрузки во время тренировки.
На фиг. 3 и 4 представлена схема тренировки при работе на тренажере сидя на переносном сиденье или стоя руками без применения ногоступ.
Передняя 2 и задняя 3 П-образные опоры для рук перпендикулярно закреплены на горизонтальную платформу 1. Стоя на горизонтальной платформе, либо сидя на переносном сиденье (те пациенты, которые не могут стоять), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, пациент попеременно или одновременно передвигает руками, либо одной рукой вперед-назад. Передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, имеют горизонтальные 45, 47 и вертикальные 46, 48 ручки и перемещаются вперед-назад по регулируемым по высоте передним 15 и задним 16 планкам, благодаря наличию верхних 41, 43 и нижних 42, 44 колес.
Для регулирования длины хода передней 21 и задней 22 Г-образных рукояток - держателей для рук вперед-назад, имеются левые 37, 39 и правые 38, 40 фиксаторы, через отверстия 49 и 50, расположенные на передней 15 и задней 16 планках.
Для регулирования высоты (в зависимости от роста пациента, а также для работы сидя на переносном сиденье) передней 15 и задней 16 планок вверх-вниз на которых перемещаются Г-образные рукоятки 21, 22 - держателей для рук, имеются передние 33, 34 и задние 35, 36 регуляторы высоты, через отверстия 51 и 52, расположенные на передних 17, 18 и задних 19, 20 вертикальных стоек П-образных опор 2 и 3.
Для проработки большего количества мышц пациентов во время тренировки, передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, имеют горизонтальные 45, 47 и вертикальные 46, 48 ручки, вращающиеся вокруг своей оси (что помогает избежать травмирование суставов).
Во избежание проскальзывания стоп пациентов во время тренировок ногоступы 5, 6 снабжены бортиками 31, 32.
Для создания дополнительной нагрузки для ног во время тренировок здоровых людей и спортсменов на тренажере предусмотрено привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54, имеющихся на ногоступах 5, 6 спереди или сзади под амортизаторами 27, 27а, 28, 28а.
При создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а другой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка.
Данный тренажер предназначен для работы различных нозологических групп людей с инвалидностью и без нее: с нарушением опорно-двигательного аппарата (ПОДА), с нарушением и травмой головного мозга, с нарушением центральной нервной системы (ЦНС), в том числе после инсультов, а также здоровых людей и спортсменов.
Работа тренажера ЛЫЖНИК описана в способах тренировок с помощью тренажера.
Способ тренировки с помощью заявляемого тренажера ЛЫЖНИК заключается в выполнении следующих упражнений:
1) Классический ход - работа ногами и руками. Стоя на ногоступах, держась руками за рукоятки - держатели для рук, пациент попеременно или одновременно передвигает ногами, либо одной ногой вперед-назад, и параллельно этому он также попеременно или одновременно передвигает руками, либо одной рукой вперед-назад, руками во время тренировки можно держаться за различные рукоятки (горизонтальные и вертикальные), что увеличивает количество разрабатываемых групп мышц. Для создания дополнительной нагрузки, в том числе для здоровых людей и спортсменов применяются резиновые эспандеры (причем привязку можно делать как для ног, так и для рук). Привязка для ног - один конец эспандера привязываем к горизонтальной платформе, а другой к ногоступу. Различные варианты фиксации эспандеров во время тренировки (оба ногоступа спереди, либо оба ногоступа сзади или один спереди, а другой сзади, либо только один спереди или сзади), также увеличивает количество прорабатываемых групп мышц. При создания дополнительной нагрузки для рук, один конец эспандера привязывается к Г-образной рукоятке, а ругой конец к отверстиям на планках по которым перемещается рукоятка;
2) Движения только рук (без использования ногоступ). Стоя на горизонтальной платформе или сидя на переносном сиденье (для тех, кто не может стоять), держась руками за рукоятки - держатели для рук, пациент попеременно или одновременно передвигает руками, либо одной рукой вперед-назад, руками во время тренировки можно держаться за различные рукоятки (горизонтальные и вертикальные), что увеличивает количество разрабатываемых групп мышц. Для создания дополнительной нагрузки применяются резиновые эспандеры. Один конец эспандера привязывается к Г-образной рукоятке, а ругой конец к отверстиям на планках по которым перемещается рукоятка.
Пример 1. Тренировка, классический ход - работа ногами и руками (фиг. 1, 2). Пациент стоя на ногоступах 5, 6 для классического хода, держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, начинает попеременно или одновременно передвигать ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, благодаря наличию колес 29, 30, и параллельно этому он также попеременно или одновременно передвигать руками, либо одной рукой вперед-назад по передней 15 и задней 16 планке, благодаря наличию колес 41, 42, 43, 44. Длина хода при движении Г-образных рукояток - держателей для рук 21,22 вперед-назад по планкам 15,16 в зависимости от физических функциональных возможностей пациента, а также величины нагрузки, регулируется четырьмя фиксаторами левыми 37, 39 и правыми 38, 40 через отверстия 49 и 50, расположенных на передней 15 и задней 16 регулируемых по высоте планках, во время тренировки. Длина хода при движении ногоступ 5, 6 классического хода вперед-назад по направляющим 4 горизонтальной платформы 1, в зависимости величины нагрузки, регулируется двумя упорами, левым 9 и правым 10, и регуляторами упоров левого 11, 12 и правого 13, 14 через отверстия 25 и 26, расположенных на передней 23 и задней 24 балках, во время тренировки.
Передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, расположенные на планках 15, 16, регулируются по высоте в зависимости от роста пациента регуляторами высоты передних 33, 34 и задних 35,36 через отверстия 51 и 52, которые имеются на всех вертикальных стойках 17, 18, 19, 20 П-образных опор 2 и 3 для рук.
Для проработки большего количества мышц пациентов во время тренировки, передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, имеют горизонтальные 45, 47 и вертикальные 46, 48 ручки, вращающиеся вокруг своей оси (что помогает избежать травмирование суставов).
Во избежание проскальзывания стоп пациентов во время тренировок ногоступы 5, 6 снабжены бортиками 31, 32.
Для создания дополнительной нагрузки для ног во время тренировок здоровых людей и спортсменов на тренажере предусмотрено привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54, имеющихся на ногоступах 5, 6 спереди или сзади под амортизаторами 27, 27а, 28, 28а.
При создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а ругой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка.
Для предотвращения жестких ударов во время движения ногоступов вперед-назад об упоры 9, 10 на ногоступах 5 и 6 для классического хода, имеются передние 27, 28 и задние 27а, 28а амортизаторы.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Положение кистей рук сверху за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней боль-шеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Положение кистей рук снизу за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Положение кистей рук за вертикальные ручки 46, 48 при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота.
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54 ногоступ 5, 6 классического хода спереди или сзади. Положение кистей рук сверху за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54 ногоступ 5, 6 классического хода спереди или сзади. Положение кистей рук снизу за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54 ногоступ 5, 6 классического хода спереди или сзади. Положение кистей рук за вертикальные ручки 46, 48 при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук сверху за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук снизу за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Попеременная или одновременная работа ногами и руками, либо одной ногой или рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук за вертикальные ручки 46, 48 при котором пациент толкает и тянет ногоступы 5, 6 классического хода и Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц;
- суставов ног: тазобедренного, коленного, голеностопного;
- мышц ног: большой ягодичной мышцы, длинного разгибателя пальцев, четырехглавой мышцы бедра, напрягателя широкой фасции бедра, передней большеберцовой мышцы;
- вестибулярного аппарата.
Пример 2. Тренировка, движения только рук (без использования ногоступ) (фиг. 3, 4). Пациент стоя на горизонтальной платформе или сидя на переносном сиденье (для тех, кто не может стоять), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, начинает попеременно или одновременно передвигать руками, либо одной рукой вперед-назад по передней 15 и задней 16 планке, благодаря наличию колес 41, 42, 43, 44. Длина хода при движении Г-образных рукояток - держателей для рук 21, 22 вперед-назад по планкам 15, 16 в зависимости от физических функциональных возможностей пациента, а также величины нагрузки, регулируется четырьмя фиксаторами левыми 37, 39 и правыми 38, 40 через отверстия 49 и 50, расположенных на передней 15 и задней 16 регулируемых по высоте планках, во время тренировки.
Передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, расположенные на планках 15, 16, регулируются по высоте в зависимости от роста пациента регуляторами высоты передних 33, 34 и задних 35, 36 через отверстия 51 и 52, которые имеются на всех вертикальных стойках 17, 18, 19, 20 П-образных опор 2 и 3 для рук.
Для проработки большего количества мышц пациентов во время тренировки, передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук, имеют горизонтальные 45, 47 и вертикальные 46, 48 ручки, вращающиеся вокруг своей оси (что помогает избежать травмирование суставов).
При создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а ругой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка.
Попеременная или одновременная работа руками, либо одной рукой. Положение кистей рук сверху за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Попеременная или одновременная работа руками, либо одной рукой. Положение кистей рук снизу за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Попеременная или одновременная работа руками, либо одной рукой. Положение кистей за вертикальные ручки 46 и 48, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота.
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Попеременная или одновременная работа руками, либо одной рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук сверху за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Попеременная или одновременная работа руками, либо одной рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук снизу за горизонтальные ручки 45 и 47, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Попеременная или одновременная работа руками, либо одной рукой. Создание дополнительной нагрузки - привязка резиновых эспандеров, которые крепятся одним концом к передней 21 или задней 22 Г-образной рукоятке, а другим концом к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Положение кистей рук за вертикальные ручки 46 и 48, при котором пациент толкает и тянет Г-образные рукоятки 21, 22 - держателей для рук вперед и назад, что обеспечивает проработку:
- мышц спины: трапециевидных мышц; мышц, поднимающих лопатки, ромбовидных мышц, надостных мышц, широчайших мышц спины.
- мышцы груди и живота: наружной косой мышцы живота, прямой мышцы живота;
- суставов рук: плечевых, локтевых, лучезапястных;
- мышц рук: трехглавых мышц плеча, дельтовидных мышц, плечевых мышц, двуглавых мышц плеча, клювовидно-плечевых мышц.
Тренажер и способ изобретен и испытан самим автором, а также результаты изобретения получены у пациентов (см. описание ниже), что доказывает их промышленную применимость.
Пример 1. Гр-н М. 45 лет. Диагноз: Нестабильный осложненный передний скользящий двусторонний сцепившийся переломовывих тела, корня дуги слева С6, С7 слева. Компрессионный перелом тела С7. Ушиб спинного мозга тяжелой степени с формированием контузионного очага на уровне С6-С7 позвонков. Стеноз позвоночного канала до 70%. Кифотическая деформация до 150 гр. Травматический разрыв С6-С7. Передвигается на коляске. С большим трудом своими руками крутит колеса и может проехать максимум 10 м. Испытывает сильную одышку при выполнении упражнений с 5-й минуту, а также затруднения потовыделительной системы (не потеет). Сидеть вне коляски без спинки не может. Обе руки с трудом поднимает на вверх. Ногами двигать не может.
Значительное уменьшение функциональной работы рук до 60%. Правая рука: 1) плечевой сустав: сгибание 140°, а разгибание 10°; отведение равнялось 90°, а приведение 10°; наружная ротация составляла 20°, а внутренняя ротация 40°; 2) локтевой сустав: сгибание 60°, а разгибание 160°; пронация 30°, супинация 30°; 3) лучезапястный сустав: сгибание 150°, а разгибание 160°; отведение: радиальное 170°, ульнарное 175°. Левая рука: 1) плечевой сустав: сгибание 150°, а разгибание 10°; отведение равнялось 100°, а приведение 10°; наружная ротация составляла 20°, а внутренняя ротация 40°; 2) локтевой сустав: сгибание 60°, а разгибание 160°; пронация 30°, супинация 30°; 3) лучезапястный сустав: сгибание 150°, а разгибание 160°; отведение: радиальное 165°, ульнарное 170°.
Тренировка на тренажере ЛЫЖНИК. Выполнялись упражнения по примеру 2 тренировка, сидя на коляске (фиг. 3, 4) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук (обе руки фиксировали специальными реабилитационными перчатками), пациент с начала одной рукой по очереди, затем попеременно, далее одновременно передвигал руками вперед-назад и тянул-толкал Г-образные рукоятки по передней 15 и задней 16 планке: 1) положение кистей рук сверху за горизонтальные ручки 45 и 47; 2) положение кистей рук снизу за горизонтальные ручки 45 и 47; 3) положение кистей за вертикальные ручки 46 и 48. По 5 повторений на каждое упражнение в течении недели. Продолжительность тренировки 15 минут, три раза в неделю. На 4-м занятии увеличили количество повторений до 7-ми. На 10-м занятии увеличили количество повторений до 10-ти. Продолжительность тренировки 25 минут, три раза в неделю.
Ко второму месяцу занятий добавляем создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а ругой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Количество повторений по примеру 2 по 5 повторений по каждому упражнению. Продолжительность тренировки 20 минут, три раза в неделю. Снова чрез 3 занятия увеличиваем количество повторений до 7-ми, а через 10-ть занятий увеличили количество повторений до 10-ти. Продолжительность тренировки увеличилось до 35 минут, три раза в неделю.
Результат. К концу первого месяца пациент перестал фиксировать руки реабилитационными перчатками на тренажере при положении кистей снизу за горизонтальные ручки и вертикальные ручки. К концу второго месяца, начал держать спину сидя на диване без спинки, а также на полу на попе, и проезжать на коляске самостоятельно крутя колеса руками до 100 метров. Началось потовыделение и закончилась одышка при тренировках. Начал надевать и снимать футболку самостоятельно, а также начал переворачиваться с живота на спину и обратно в положении лежа. Появились небольшие движения в ногах (не спастические), сводит и разводит колени на 2 см. Значительное увеличение функциональной работы рук до 60%. Правая рука: 1) плечевой сустав: сгибание 180°, а разгибание 20°; отведение равнялось 150°, а приведение 10°; наружная ротация составляла 40°, а внутренняя ротация 50°; 2) локтевой сустав: сгибание 50°, а разгибание 180°; пронация 40°, супинация 40°; 3) лучезапястный сустав: сгибание 130°, а разгибание 120°; отведение: радиальное 140°, ульнарное 145°. Левая рука: 1) плечевой сустав: сгибание 180°, а разгибание 20°; отведение равнялось 150°, а приведение 10°; наружная ротация составляла 50°, а внутренняя ротация 50°; 2) локтевой сустав: сгибание 50°, а разгибание 170°; пронация 40°, супинация 40°; 3) лучезапястный сустав: сгибание 130°, а разгибание 140°; отведение: радиальное 155°, ульнарное 160°.
Пример 2. Гр-н М. 36 лет. Диагноз: Ушиб головного мозга тяжелой степени. Субдуральная гематома в левой теменно-височной области. Субарахноидальное кровоизлияние. Травматическое расхождение венечного шва слева и лямбдовидного шва, трещина правой теменной кости. Передвигается с канадскими тростями. Без опоры шагать боится и не может. Руки работают нормально. Плохо ориентируется в пространстве и местности, постоянно путает левое и правое, не может найти выход. Ширина шага максимум 50 см. Поднятие ног, наверх стоя держась за опору максимум: правой - 20 см, левой - 35 см.
Значительное уменьшение функциональной работы правой ноги до 80%, левой ноги до 60%. Правая нога: 1) тазобедренный сустав: сгибание со сгибанием в коленном суставе 150°, а разгибание 170°; отведение равнялось 10°, а приведение 5°; наружная ротация составляла 5°, а внутренняя ротация 5°; 2) коленный сустав: сгибание 70°, а разгибание 180°; 3) голеностопный сустав: сгибание 100°, а разгибание 120°. Левая нога: 1) тазобедренный сустав: сгибание со сгибанием в коленном суставе 80°, а разгибание 150°; отведение равнялось 20°, а приведение 20°; наружная ротация составляла 15°, а внутренняя ротация 15°; 2) коленный сустав: сгибание 140°, а разгибание 180°; 3) голеностопный сустав: сгибание 120°, а разгибание 80°
Тренировка на тренажере ЛЫЖНИК. Выполнялись упражнения по примеру 2 тренировка, стоя на горизонтальной платформе (фиг. 3, 4) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, пациент с начало одной рукой по очереди, затем попеременно, далее одновременно передвигал руками вперед-назад и тянул-толкал Г-образные рукоятки по передней 15 и задней 16 планке: 1) положение кистей рук сверху за горизонтальные ручки 45 и 47; 2) положение кистей рук снизу за горизонтальные ручки 45 и 47; 3) положение кистей за вертикальные ручки 46 и 48. По 5 повторений на каждое упражнение. Продолжительность тренировки 20 минут, три раза в неделю. На 4-м занятии добавляем создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а ругой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. Количество повторений по примеру 2 по 5 повторений по каждому упражнению. Продолжительность тренировки увеличилось до 25 минут, три раза в неделю.
На 10-м занятии к выполняемым упражнениям, добавили по примеру 1 тренировка, стоя на ногоступах классического хода 5, 6 (фиг. 1, 2) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, начинает попеременно или одновременно передвигать ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, толкал и тянул ногоступы 5, 6. Причем при работе ногами передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук зафиксированы фиксаторами левыми 37, 39 и правыми 38, 40 через отверстия 49 и 50, расположенных на передней 15 и задней 16 регулируемых по высоте планках, во время тренировки. Также по 5 повторений на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки увеличилось до 35 минут, три раза в неделю.
Ко второму месяцу занятий при работе ногами перестаем фиксировать переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, но при этом сначала работает ногами, а затем и руками по очереди. При этом длина хода рук и ног минимальная, которая регулируется: для ног - двумя упорами, левой 9 и правой 10, которые регулируют длину хода ногоступов 5, 6 регуляторами упоров левого 11, 12 и правого 13, 14 через отверстия 25 и 26, расположенных на передней 23 и задней 24 балках (закрепленных болтами на горизонтальную платформу 1 при помощи фиксирующих болтов 7, 8); для рук - фиксаторами левыми 37, 39 и правыми 38, 40 через отверстия 49 и 50, расположенных на передней 15 и задней 16 регулируемых по высоте планках, во время тренировки. Через 1.5 месяца начинаем увеличивать длину хода рук и ног. Увеличиваем количество повторений до 8 на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки 35 минут, три раза в неделю.
Через 2 месяца занятий начинается одновременная работа рук и ног, при этом длина хода рук и ног также минимальная. Добавляем количество повторений к концу 2-го месяца до 10 повторений по каждому упражнению по примеру 1 (фиг. 1, 2) (см. описание выше), стоя на ногоступах 5, 6 для классического хода, держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, попеременно затем одновременно передвигает ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, и параллельно этому он также попеременно или одновременно передвигает руками, либо одной рукой вперед-назад по передней 15 и задней 16 планке. По мере освоения и адаптации пациента начинаем увеличивать длину хода рук и ног через регуляторы и фиксаторы. Продолжительность тренировки увеличилось до 40 минут, три раза в неделю.
Результат. К концу первого месяца пациент перестал держаться за опоры при ходьбе в помещении, только страховка возле него. К концу третьего месяца, начал передвигаться на улице без опоры на расстоянии до 50 метров, причем вперед-назад и влево-вправо. Увеличение количество пройденного расстояния на улице с 300 до 1500 метров и более за одну тренировку. Максимальная ширина шага увеличилась до 70 см. Поднятие ног, наверх стоя без опоры: правой - 20 см, левой - 35 см. Также наблюдается улучшение ориентации в местности и пространстве, сам заходит и выходит из центра без подсказки. Значительное увеличение функциональной работы правой ноги до 40%, левой ноги до 50%. Правая нога: 1) тазобедренный сустав: сгибание со сгибанием в коленном суставе 120°, а разгибание 160°; отведение равнялось 20°, а приведение 20°; наружная ротация составляла 15°, а внутренняя ротация 15°; 2) коленный сустав: сгибание 90°, а разгибание 180°; 3) голеностопный сустав: сгибание 120°, а разгибание 90°. Левая нога: 1) тазобедренный сустав: сгибание со сгибанием в коленном суставе 90°, а разгибание 140°; отведение равнялось 30°, а приведение 30°; наружная ротация составляла 30°, а внутренняя ротация 25°; 2) коленный сустав: сгибание 140°, а разгибание 180°; 3) голеностопный сустав: сгибание 130°, а разгибание 70°.
Пример 3. Гр-н М. 27 лет. Диагноз: Детский церебральный паралич (ДЦП), с легким выраженным ограничением двигательных функций, 3-я гр. инв. Незначительные ограничения при ходьбе, среднее ограничения при ходьбе назад, налево-направо и беге - храмота. Потеря ориентации при максимальных выпадах ногами вперед.
Тренировка на тренажере ЛЫЖНИК. Выполнялись упражнения по примеру 1 тренировка, стоя на ногоступах классического хода 5, 6 (фиг. 1, 2) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, начинает попеременно или одновременно передвигать ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, и параллельно этому он также попеременно или одновременно передвигает руками, либо одной рукой вперед-назад по передней 15 и задней 16 планке. По 5 повторений на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки 20 минут, три раза в неделю.
К 7-му занятию добавляем создания дополнительной нагрузки для рук, один конец эспандера привязывается к 21 передней или 22 задней Г-образной рукоятке, а ругой конец к отверстиям 49, 50 на планках 15, 16 по которым перемещается рукоятка. По 5 повторений на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки 25 минут, три раза в неделю.
Ко второму месяцу занятий добавляем создания дополнительной нагрузки для ног, привязка резиновых эспандеров, которые крепятся одним концом на левой, либо правой стороне ушках 53 горизонтальной платформы 1, а другим концом на ушках 54, имеющихся на ногоступах 5, 6 спереди или сзади под амортизаторами 27, 27а, 28, 28а. По 5 повторений на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки 35 минут, три раза в неделю.
К третьему месяцу занятий добавляем количество повторений по примерам 1 с 5 до 10 повторений по каждому упражнению. Продолжительность тренировки увеличилось до 45 минут, три раза в неделю.
Результат. К концу первого месяца значительные улучшения при ходьбе влево-вправо и назад. К концу второго месяца, значительно улучшилась координация при выгодах ногами вперед. К концу третьего месяца в два раза увеличилась скорость при беге, и значительное уменьшение храмоты. Наблюдаются улучшения сердечно-сосудистой и дыхательной системы, что подтверждается выносливостью в продолжительных тренировках.
Пример 4. Гр-ка Ж. 67 л. Клинический диагноз: признаки дегенеративно-дистрофических изменений пояснично-крестцового отдела позвоночника (остеохондроз). Сколиоз. Ретроспондилолистез L5. Код МКБ 10 - М42.17. Протрузии дисков L2/L3, L3/L4, L4/L5, L5/S1. Передвигается самостоятельно но с большим трудом. Проблемы сердечно-сосудистой системы, учищенное сердцебиение свыше 100 уд./мин. Нарушена ориентация в пространстве и работа нижних конечностей.
Тренировка на тренажере ЛЫЖНИК. Выполнялись упражнения по примеру 2 тренировка, стоя на горизонтальной платформе (фиг. 3, 4) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, пациент с начало одной рукой по очереди, затем попеременно, далее одновременно передвигал руками вперед-назад и тянул-толкал Г-образные рукоятки по передней 15 и задней 16 планке: 1) положение кистей рук сверху за горизонтальные ручки 45 и 47; 2) положение кистей рук снизу за горизонтальные ручки 45 и 47; 3) положение кистей за вертикальные ручки 46 и 48. По 5 повторений на каждое упражнение в течение двух недель. Продолжительность тренировки 20 минут, три раза в неделю. На 7-м занятии к выполняемым упражнениям, добавили по примеру 1 тренировка, стоя на ногоступах классического хода 5, 6 (фиг. 1, 2) (см. описание выше), держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, начинает попеременно или одновременно передвигать ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, толкал и тянул ногоступы 5, 6. Причем при работе ногами передняя 21 и задняя 22 Г-образные рукоятки - держатели для рук зафиксированы фиксаторами левыми 37, 39 и правыми 38, 40 через отверстия 49 и 50, расположенных на передней 15 и задней 16 регулируемых по высоте планках, во время тренировки. Также по 5 повторений на каждое упражнение в течение двух недель. Это максимальное количество повторений за одну тренировку. Продолжительность тренировки увеличилось до 30 минут, три раза в неделю.
Ко второму месяцу занятий при работе ногами перестаем фиксировать переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, но при этом сначала работает ногами, а затем и руками по очереди. Через 1.5 месяца занятий начинается одновременная работа рук и ног. Добавляем количество повторений к концу 2-го месяца с 5 до 10 повторений по каждому упражнению по примеру 1 (фиг. 1, 2) (см. описание выше), стоя на ногоступах 5, 6 для классического хода, держась руками за переднюю 21 и заднюю 22 Г-образные рукоятки - держатели для рук, попеременно затем одновременно передвигает ногами либо одной ногой вперед-назад по направляющим 4 горизонтальной платформы 1, и параллельно этому она также попеременно или одновременно передвигает руками, либо одной рукой вперед-назад по передней 15 и задней 16 планке. Продолжительность тренировки увеличилось до 40 минут, два раза в неделю.
Результат. К концу первого месяца перестала волочить ноги, а также перестала заваливаться. К концу второго месяца сердцебиение снизилось до 80 уд./мин., и полностью восстановилась координация движений и ориентация в пространстве. Вернулась прежняя работоспособность организма.
Группа изобретений относится к тренажерам для реабилитации пациентов с нарушениями опорно-двигательного аппарата и способам реабилитации с помощью этих тренажеров. Тренажер содержит ногоступы для размещения на них стоп пациента, горизонтальную платформу с направляющими, на которой закреплены передняя и задняя П-образные опоры для рук, а также переднюю и заднюю Г-образные рукоятки. Ногоступы выполнены с возможностью перемещения по направляющим горизонтальной платформы. Каждая передняя и задняя П-образная опора для рук состоит из пары вертикальных стоек. На каждой паре вертикальных стоек передней и задней П-образных опор закреплена с возможностью регулирования по высоте вертикальных стоек соответствующая передняя и задняя горизонтальная направляющая планка. Передняя и задняя Г-образные рукоятки выполнены с возможностью перемещения по передней и задней горизонтальной направляющей планке соответственно. Каждая Г-образная рукоятка выполнена в виде корпуса, на котором установлены ориентированные перпендикулярно друг другу горизонтальная и вертикальная ручки, выполненные с возможностью вращения относительно своих осей. Передняя и задняя направляющие планки содержат фиксаторы, выполненные с возможностью регулировки длины хода Г-образных рукояток вдоль направляющих планок. Достигается повышение эффективности тренажера для реабилитации пациентов с нарушениями опорно-двигательного аппарата за счет увеличения его функциональных возможностей путем обеспечения возможности перемещения рукояток для рук с различным хватом, а также возможности регулировки диапазона перемещения указанных рукояток. 3 н.п. ф-лы, 4 ил.
1. Тренажер для реабилитации пациентов с нарушениями опорно-двигательного аппарата лыжник, содержащий горизонтальную платформу с направляющими, на которой перпендикулярно закреплены передняя и задняя П-образные опоры для рук, ориентированные вдоль горизонтальной платформы, ногоступы для размещения на них стоп пациента, выполненные с возможностью перемещения по направляющим горизонтальной платформы, каждый из которых снабжен бортиками для предотвращения проскальзывания стоп пациентов, четырьмя колесами, имеющими пазы для перемещения по направляющим горизонтальной платформы, и резиновыми амортизаторами и ушками ногоступов с двух противоположных сторон ногоступов, при этом ушки ногоступов выполнены с возможностью прикрепления к ним концов резиновых эспандеров для создания сопротивления ногоступам при их перемещении по направляющим горизонтальной платформы, а горизонтальная платформа содержит ушки горизонтальной платформы, которые выполнены с возможностью прикрепления к ним других концов резиновых эспандеров, и передвижные упоры для регулировки длины хода ногоступов по направляющим горизонтальной платформы, отличающийся тем, что содержит переднюю и заднюю Г-образные рукоятки, каждая передняя и задняя П-образная опора для рук состоит из пары вертикальных стоек, при этом на каждой паре вертикальных стоек передней и задней П-образных опор закреплена с возможностью регулирования по высоте вертикальных стоек соответствующая передняя и задняя горизонтальная направляющая планка, ориентированная вдоль горизонтальной платформы, а передняя и задняя Г-образные рукоятки, выполненные с возможностью перемещения по передней и задней горизонтальной направляющей планке соответственно, каждая выполнена в виде корпуса, на котором установлены ориентированные перпендикулярно друг другу горизонтальная и вертикальная ручки, выполненные с возможностью вращения относительно своих осей, и закреплены четыре колеса таким образом, что при перемещении Г-образных рукояток по направляющим планкам П-образных опор два из четырех колес расположены сверху направляющей планки, а другие два колеса расположены снизу направляющей планки, при этом каждое колесо выполнено с пазом для направляющей планки, а передняя и задняя направляющие планки содержат фиксаторы, выполненные с возможностью регулировки длины хода Г-образных рукояток вдоль направляющих планок, при этом тренажер содержит резиновые эспандеры для создания сопротивления Г-образным рукояткам при их перемещении вдоль направляющих планок, причем один конец эспандера привязан к Г-образной рукоятке, а другой конец эспандера привязан к отверстию в направляющей планке, по которой перемещается Г-образная рукоятка.
2. Способ реабилитации пациентов с нарушениями опорно-двигательного аппарата, осуществляемый с помощью тренажера лыжник по п. 1, заключается в выполнении упражнения, при котором пациент, стоя на ногоступах тренажера и держась руками за вертикальные или горизонтальные ручки Г-образных рукояток, передвигает ногами или одной ногой вперед-назад вдоль направляющих горизонтальной платформы и передвигает руками или одной рукой вперед-назад вдоль горизонтальных направляющих планок П-образных опор, закрепленных на горизонтальной платформе.
3. Способ реабилитации пациентов с нарушениями опорно-двигательного аппарата, осуществляемый с помощью тренажера лыжник по п. 1, заключается в выполнении упражнения, при котором пациент, стоя на горизонтальной платформе или сидя на переносном сиденье, держась руками за вертикальные или горизонтальные ручки Г-образных рукояток, передвигает руками или одной рукой вперед-назад вдоль горизонтальных направляющих планок П-образных опор, закрепленных на горизонтальной платформе.
| US 4529194 A, 16.07.1985 | |||
| Тренажер для ног (варианты) | 2019 |
|
RU2718344C1 |
| DE 8435722 U1, 14.03.1985 | |||
| US 2014031175 A1, 30.01.2014 | |||
| US 5690590 A, 25.11.1997. | |||

