Изобретение относится к радиотехнике, а именно к способам приема цифровых сигналов, передаваемых методом амплитудной манипуляции (АМ), и может быть реализовано в системах связи и передачи данных.
Известен «Способ передачи речевой информации» (Патент РФ № 2124268, H04B 3/50, опубл.: 27.12.1998.).
В известном способе передачи и приема речевой информации, включающем на передающей стороне преобразование акустического сигнала и электрический сигнал, усиление и передачу его с помощью несущей частоты fн а на приемной стороне фильтрацию несущей частоты fн, детектирование в преобразование электрического сигнала в акустический сигнал, дополнительно на передающей стороне после усиления перед передачей с помощью несущей частоты fн преобразуют электрический сигнал с двумя чередующимися коммутируемыми постоянными уровнями, частота которого соответствует частоте речевой информации, после чего в моменты появления каждого из двух коммутируемых постоянных уровней формируют код, а на приемной стороне после фильтрации несущей частоты fн и детектирования осуществляют корреляционную обработку кода, а перед преобразованием электрического сигнала в акустический формируют электрический сигнал с двумя чередующимися коммутируемыми постоянными уровнями, частота которого соответствует частоте речевой информации.
Недостатком этого способа является ограниченность области применения, поскольку его реализация не обеспечивает демодуляцию сигналов АМ в условиях замираний в канале приема.
Известен «Способ демодуляции» (Дворников С.В., Осадчий А.И., Дворников С.С., Родин Д.В. Демодуляция сигналов на основе обработки их модифицированных распределений // Контроль. Диагностика. 2010. № 10. С. 46-54).
В известном способе на первом этапе рассчитывается матрица частотно-временного представления демодулируемого сигнала.
На втором этапе определяются фрагменты матрицы распределения, в пределах которых локализуется энергия сигнальных компонент.
На третьем этапе определяется уровень порога принятия решения.
На четвертом осуществляется демодуляция как процедура сравнения значений функции огибающей с величиной порога в каждый момент времени на основе дуального решения, т.е. есть пересечение или нет
Недостатком этого способа является ограниченность области применения, поскольку его реализация ориентирована только на демодуляцию сигналов частотной манипуляции. Кроме того, в указанном способе рассмотрен сам принцип демодуляции сигналов частотной манипуляции, поэтому в нем не раскрыты процедуры определения уровня порога принятия решения, существенные при демодуляции сигналов амплитудной манипуляции.
Наиболее близким является «Способ демодуляции сигналов с относительной фазовой демодуляцией» (Патент РФ № 2461119, H03D 3/02, опубл.: 10.09.2012. Бюл. № 25).
В прототипе принимают сигнал S(t), фильтруют и выравнивают его амплитуду относительно заданного уровня, вычисляют параметры сигнала и сравнивают их с предварительно заданными пороговыми величинами, присваивают значение «единица» принятому информационному элементу, если расчетные параметры сигнала превысили заданную пороговую величину, в противном случае - «нуль». Причем для вычисления параметров из отфильтрованного сигнала с выровненной амплитудой формируют матрицу оконного преобразования Фурье (ОПФ) 




Недостатком этого способа является ограниченность области применения, поскольку его реализация не обеспечивает демодуляцию сигналов АМ в условиях замираний в канале приема.
Задачей изобретения является создание способа, обеспечивающего возможность демодуляции сигналов АМ в условиях замираний в канале приема.
Техническим результатом является нормирование значений матрицы ОПФ независимо для каждого текущего значения координаты на оси времени относительно ее текущей максимальной величины.
Заявляемый технический результат достигается тем, что в известном способе принимают сигнал, фильтруют, формируют матрицу оконного преобразования Фурье, затем для каждого значения координаты на оси времени матрицы определяют значение координаты на оси частоты, при которой матрица каждый раз принимает максимальную величину, и определяют ее текущей максимальной величиной, формируют вектор модулируемого сигнала для всех координат матрицы по оси времени, из вектора модулируемого сигнала вычисляют вектор его средних значений, который принимают в качестве пороговой величины, принятому информационному элементу присваивают значение «единица» или «нуль» по результатам сравнения между собой каждого значения вектора модулируемого сигнала и величины вектора его средних значений, на оси времени определяют числовые значения координат интервалов принятых информационных элементов, вычисляют длительности интервалов, как разность между значениями координат, определяющих их границы на оси времени, и наименьшую из полученных разностей определяют в качестве длительности демодулированного символа, дополнительно рассчитывают среднеквадратическое отклонение значений матрицы оконного преобразования Фурье для каждого значения координаты на оси времени матрицы, и для каждого значения координаты на оси времени матрицы сравнивают утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени матрицы с ее текущей максимальной величиной, присваивают единичное значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени, и присваивают нулевое значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина не превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени, а вектор модулируемого сигнала для всех координат матрицы по оси времени формируют только для крайних значений координат матриц на оси частоты.
Благодаря новой совокупности существенных признаков в заявленном способе обеспечивается возможность демодуляции сигналов АМ в условиях замираний в канале приема.
Технический результат достигается за счет преобразования матрицы ОПФ принятого сигнала таким образом, что все ее значения становятся равными или единице или нулю. Для этого, для текущего значения координаты на оси времени матрицы ОПФ рассчитывают среднеквадратические отклонения ее частотных значений. Затем утроенное значение рассчитанных среднеквадратических отклонений частотных значений сравнивают с максимальными значениями ОПФ для текущего значения координаты на оси времени, которые определяют (т.е. называют) текущей максимальной величиной. И по результатам сравнения присваивают единичное значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени. А нулевое значение присваивают всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина не превысит утроенное значение ее среднеквадратических отклонений.
Заявленный способ поясняется чертежами, на которых показаны:
фиг. 1, где изображены фрагменты: временного представления сигнала АМ в канале без замираний s(t); временного представления сигнала АМ в канале с замираниями s1(t); вектор модулируемого сигнала, построенный на основе ОПФ из способа-прототипа s2(t); вектор модулируемого сигнала, построенный на основе ОПФ из заявляемого технического решения s3(t);
фиг. 2, где изображен фрагмент матрицы ОПФ 
фиг. 3, где изображен фрагмент матрицы ОПФ 
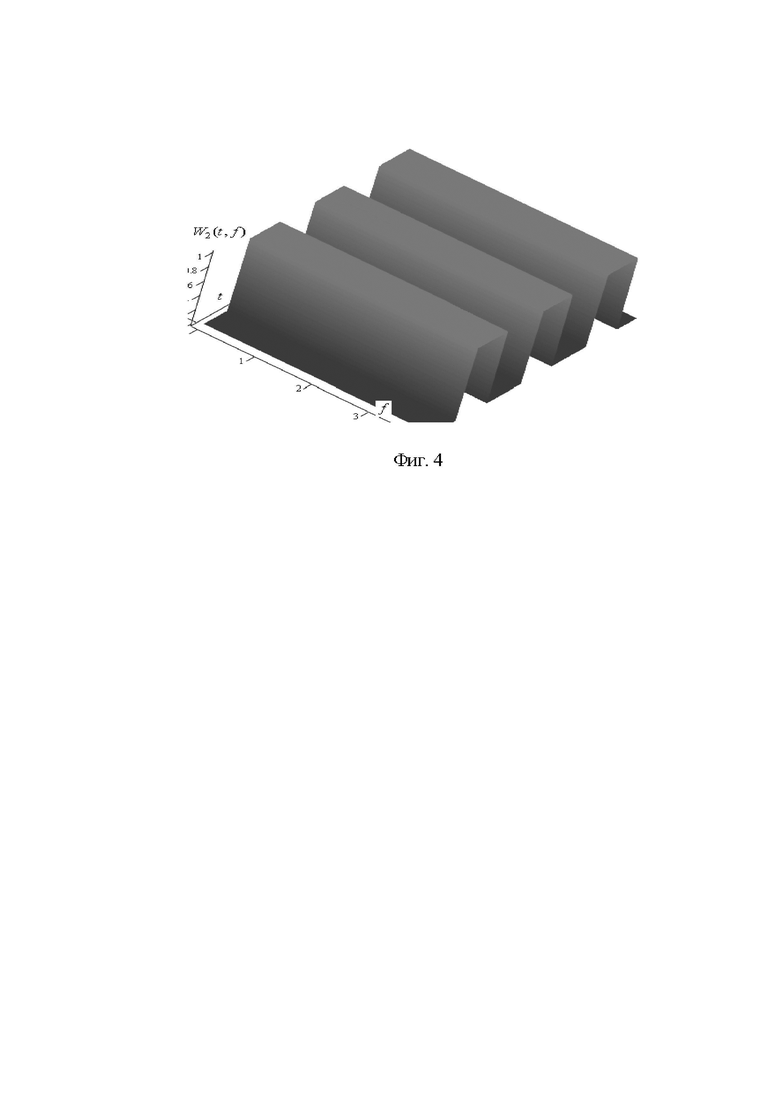
фиг. 4, где изображен фрагмент матрицы ОПФ 
Демодуляция сигналов АМ известна, см., например, [Б.Скляр. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр.: Пер. с англ. – М.: Издательский дом «Вильямс», 2003, 1114 с.].
Переход к представлению принятого сигнала s(t) на основе ОПФ обусловлен тем, что только в этом случае полученное частотно-временное представление наиболее полно характеризует исследуемые сигналы на длительности интервала их наблюдения, см. стр. 65 [Дворников С.В., Кудрявцев А.М. Теоретические основы частотно-временного анализа кратковременных сигналов: монография. СПб.: ВАС, 2010. 240 с].
При реализации процедуры ОПФ происходит усреднение энергии в пределах окна анализа, поэтому данное свойство целесообразно использовать для демодуляции сигналов АМ, см. [Дворников С.В., Сауков А.М. Модификация частотно-временных описаний нестационарных процессов на ос-нове показательных и степенных функций. Научное приборостроение. 2004. Т. 14. № 3. С. 76−85].
Сигналы АМ в каналах без замираний, см. s(t) на фиг. 1, могут быть демодулированы и на основе технического решения, представленного в способе-прототипе, поскольку на матрицах ОПФ наблюдаются контрастные пики энергии в пределах частотно-временного континуума, соответствующего временной посылке сигнала АМ. В качестве примера, на фиг. 2 показана матрица ОПФ 
Однако в каналах с замираниями возможна ситуация, когда одна или несколько посылок будет подавлены. В качестве примера на фиг. 1 представлен сигнал s1(t), он соответствует сигналу s(t) в канале с замираниями. В этом случае техническое решение, представленное в способе-прототипе, не позволит правильно демодулировать такой сигнал. В качестве примера на фиг. 3 показана матрица ОПФ
В тоже время на фиг. 4 показана матрица ОПФ
На фиг. 1 показана пунктирная линия М2, соответствующая значению вектора средних значений вектора модулируемого сигнала s3(t) для всех координат матрицы ОПФ 
Очевидно, что средний сигнальный символ по своей амплитуде больше М2, поэтому он будет демодулирован верно.
Представленный пример раскрывает физическую сущность заявляемого технического решения.
Реализация заявленного способа объясняется следующим образом.
1. Принимают сигнал.
Процедуры приема аналогового сигнала известны, и, например, рассмотрены в, см. [Способ распознавания радиосигналов, Патент РФ № 2356064, Опубл.: 20.05.2009. Бюл. № 14].
2. Фильтруют.
Процедуры фильтрации аналогового сигнала известны, и, например, рассмотрены в, см. [Способ распознавания радиосигналов, Патент РФ № 2423735, Опубл.: 10.07.2011 Бюл. № 19].
3. Формируют матрицу оконного преобразования Фурье.
Процедуры формирования матрицы ОПФ из обрабатываемого сигнала известны, и, например, рассмотрены в, см. (Дворников С.В. Теоретические основы синтеза билинейных распределений. СПб.: ВАС, 2007. 268 c.).
4. Затем для каждого значения координаты на оси времени матрицы определяют значение координаты на оси частоты, при которой матрица каждый раз принимает максимальную величину, и определяют ее текущей максимальной величиной.
Указанные процедуры известны, и рассмотрены, например, см. (Дворников С.В., Алексеева Т.Е. Распределение Алексеева и его применение в задачах частотно-временной обработки сигналов // Информация и космос. 2006. № 3. С. 9−20).
5. Рассчитывают среднеквадратическое отклонение значений матрицы оконного преобразования Фурье для каждого значения координаты на оси времени матрицы.
Расчет значения среднеквадратического отклонения известен и может быть проведен последующей формуле
между функциями взаимных корреляций K(τ) и С(τ), рассчитываемое по формуле

где N – количество частотных отсчетов матрицы ОПФ; 

В качестве примера на фиг. 3 показана матрица ОПФ, сформированная на основе сигнала s1(t).
6. Для каждого значения координаты на оси времени матрицы сравнивают утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени матрицы с ее текущей максимальной величиной.
Утроенное значение
7. Присваивают единичное значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени. И присваивают нулевое значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина не превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени,
Сравнивают абсолютные значения. Формализовать указанные процедуры для реализации процедур в автоматическом режиме можно следующим образом

В формуле (2) 
Таким образом, матрица 
Выбор порогового значения 
Процедуры сравнения известны, например, см. [Способ радиоподавления каналов связи, Патент РФ № 2450458, H04K 3/00 (2006.01), Опубл.: 10.05.2012. Бюл. № 13].
8. А вектор модулируемого сигнала для всех координат матрицы по оси времени формируют только для крайних значений координат матриц на оси частоты.
Формирование вектора модулируемого сигнала s3(t) осуществляют для всех координат матрицы по оси времени
Для примера, представленного на фиг. 4, крайними значениями матрицы 


9. Из вектора модулируемого сигнала вычисляют вектор его средних значений, который принимают в качестве пороговой величины.
Вычисление средних значений можно осуществить посредством интегратора. Формализовать указанные процедуры для реализации процедур в автоматическом режиме можно следующим образом

где М – количество временных отсчетов матрицы ОПФ.
Процедуры расчета средних значений компонент сигналов известны, например, см. [Способ обнаружения сигналов без несущей. Патент RU № 2484581, H04B 1/10 (2006.01). Опубл.: 10.06.2013. Бюл. № 16].
10. Принятому информационному элементу присваивают значение «единица» или «нуль» по результатам сравнения между собой каждого значения вектора модулируемого сигнала и величины вектора его средних значений.
Сравнивают абсолютные значения. Формализовать указанные процедуры для реализации процедур в автоматическом режиме можно следующим образом, в соответствии с формулой (4)

В качестве примера, на фиг. 1 показаны значения вектора модулируемого сигнала s2(t) и величины вектора его средних значений M2, полученные на основе матрице ОПФ 
Отметим, что матрица ОПФ 
11. На оси времени определяют числовые значения координат интервалов принятых информационных элементов, вычисляют длительности интервалов, как разность между значениями координат, определяющих их границы на оси времени, и наименьшую из полученных разностей определяют в качестве длительности демодулированного символа.
Реализация указанных процедур аналогична процедурам, реализованным в способе-прототипе.
Таким образом, благодаря новой совокупности существенных признаков в заявленном способе обеспечивается демодуляция сигнала АМ в канале приема с замираниями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демодуляции сигналов | 2022 |
|
RU2786193C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ ДЕМОДУЛЯЦИЕЙ | 2011 |
|
RU2461119C1 |
| Демодулятор сигналов амплитудной манипуляции | 2022 |
|
RU2781271C1 |
| Демодулятор сигналов амплитудной манипуляции | 2023 |
|
RU2808227C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ БЕЗ НЕСУЩЕЙ | 2012 |
|
RU2484581C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ (ВАРИАНТЫ) | 2010 |
|
RU2454014C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ БЕЗ НЕСУЩЕЙ | 2012 |
|
RU2485692C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2232485C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ ДЕМОДУЛЯЦИЕЙ | 2011 |
|
RU2469487C1 |
| СПОСОБ И СИСТЕМА С МНОГОКАНАЛЬНЫМ ДОСТУПОМ И СПЕКТРОМ РАСШИРЕНИЯ СООБЩЕНИЯ ДЛЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ МЕЖДУ МНОЖЕСТВОМ СТАНЦИЙ С ИСПОЛЬЗОВАНИЕМ КОДОВОГО РАЗДЕЛЕНИЯ СИГНАЛОВ СВЯЗИ СПЕКТРА РАСШИРЕНИЯ | 1991 |
|
RU2104615C1 |

Изобретение относится к способам приема сигналов, передаваемых методом амплитудной манипуляции (АМ). Технический результат заключается в обеспечении возможности демодуляции сигналов АМ в условиях замираний в канале приема за счет нормирования значений матрицы оконного преобразования Фурье (ОПФ) независимо для каждого текущего значения координаты на оси времени относительно ее текущей максимальной величины. Для этого для текущего значения координаты на оси времени матрицы ОПФ рассчитывают среднеквадратические отклонения ее частотных значений. Затем утроенное значение рассчитанных среднеквадратических отклонений частотных значений сравнивают с максимальными значениями ОПФ для текущего значения координаты на оси времени, которые называют текущей максимальной величиной. Присваивают единичное значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени. Нулевое значение присваивают всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина не превысит утроенное значение ее среднеквадратических отклонений. 4 ил.
Способ демодуляции сигналов с амплитудной модуляцией, заключающийся в том, что принимают сигнал, фильтруют, формируют матрицу оконного преобразования Фурье, затем для каждого значения координаты на оси времени матрицы определяют значение координаты на оси частоты, при которой матрица каждый раз принимает максимальную величину, и определяют ее текущей максимальной величиной, формируют вектор модулируемого сигнала для всех координат матрицы по оси времени, из вектора модулируемого сигнала вычисляют вектор его средних значений, который принимают в качестве пороговой величины, принятому информационному элементу присваивают значение «единица» или «нуль» по результатам сравнения между собой каждого значения вектора модулируемого сигнала и величины вектора его средних значений, на оси времени определяют числовые значения координат интервалов принятых информационных элементов, вычисляют длительности интервалов как разность между значениями координат, определяющих их границы на оси времени, и наименьшую из полученных разностей определяют в качестве длительности демодулированного символа, отличающийся тем, что рассчитывают среднеквадратическое отклонение значений матрицы оконного преобразования Фурье для каждого значения координаты на оси времени матрицы, и для каждого значения координаты на оси времени, матрицы сравнивают утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени матрицы с ее текущей максимальной величиной, присваивают единичное значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени, и присваивают нулевое значение всем значениям матрицы для текущего значения координаты на оси времени, если ее текущая максимальная величина не превысит утроенное значение ее среднеквадратических отклонений, рассчитанных для текущего значения координаты на оси времени, а вектор модулируемого сигнала для всех координат матрицы по оси времени формируют только для крайних значений координат матриц на оси частоты.
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ ДЕМОДУЛЯЦИЕЙ | 2011 |
|
RU2461119C1 |
| СПОСОБ ПЕРЕДАЧИ РЕЧЕВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2124268C1 |
| СПОСОБ ПРИЕМА OFDM СИГНАЛОВ | 2017 |
|
RU2719396C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ И ДЕМОДУЛЯЦИИ СИГНАЛА С НЕИЗВЕСТНОЙ СТРУКТУРОЙ | 2008 |
|
RU2386165C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |

