ПРЕДПОСЫЛКИ СОЗДАНИЯ ДАННОГО ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится данное изобретение
[0001] Настоящее изобретение относится к электронным устройствам управления транспортным средством, способам электронного управления транспортным средством и носителям постоянного хранения данных для вождения транспортного средства в автономном режиме.
2. Описание предшествующего уровня техники
[0002] Электронные устройства управления транспортным средством для вождения транспортного средства в автономном режиме общеизвестны. Одно из таких устройств управления содержит первый контроллер и второй контроллер. В нормальном состоянии (когда первый контроллер находится в обычном состоянии) первый контроллер управляет двигателем, тормозами, рулевым управлением и т. д. для вождения транспортного средства в автономном режиме. Если возникает сбой в части первого контроллера, второй контроллер управляет двигателем, тормозами, рулевым управлением и т. д. для вождения транспортного средства в автономном режиме. Первый контроллер и второй контроллер получают питание от аккумулятора (см. публикацию не прошедшей экспертизу японской патентной заявки № 2003-15743 (JP 2003-15743 A)).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Рассматривается возможность настраивать электронное устройство управления транспортного средства так, чтобы в случае, если возникает сбой в части первого контроллера, второй контроллер управляет двигателем, тормозами, рулевым управлением и т.д., чтобы затормозить и остановить транспортное средство при таком уменьшении скорости, которое не вынуждает пользователя беспокоиться, не требует резкого торможения следующего за ним транспортного средства. В этом случае аккумулятору нужно иметь достаточное количество электроэнергии для поддержания второго контроллера в рабочем состоянии, пока не остановится транспортное средство.
[0004] Например, если скорость транспортного средства относительно мала, когда второй контроллер начинает управление транспортным средством, время, необходимое для остановки транспортного средства, относительно невелико. Соответственно, второй контроллер потребляет относительно небольшое количество электроэнергии в течение периода с момента, когда второй контроллер начинает торможение транспортного средства, до тех пор, пока не остановится транспортное средство (здесь и далее именуемого как «период замедления»). С другой стороны, если скорость транспортного средства относительно высока, когда второй контроллер начинает управление транспортным средством, период торможения относительно большой. Поэтому второй контроллер потребляет относительно большое количество электроэнергии в течение периода торможения. Как описано выше, потребление электроэнергии вторым контроллером в течение периода торможения изменяется в зависимости от скорости транспортного средства, когда второй контроллер начинает управление транспортным средством. Поэтому необходимо определить емкость аккумулятора с учетом максимального энергопотребления второго контроллера. Соответственно, транспортное средство нуждается в оснащении аккумулятором большой емкости. Это увеличивает стоимость аккумулятора и, следовательно, увеличивает стоимость комплектующих транспортного средства.
[0005] Настоящее изобретение обеспечивает электронное устройство управления транспортным средством, способ электронного управления транспортным средством и носитель постоянного хранения данных, которые могут снизить стоимость комплектующих деталей транспортного средства.
[0006] Электронное устройство управления транспортным средством в соответствии с первым аспектом настоящего изобретения содержит устройство обнаружения, выполненное с возможностью обнаружения состояния пользователя, сидящего на сиденье, где пользователь управляет средством управления вождением транспортного средства, первое устройство управления и второе устройство управления. Первое устройство управления выполнено с возможностью питания от первого аккумулятора, установленного на транспортном средстве. Первое устройство управления выполнено с возможностью обращения к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства. Первое устройство управления выполнено с возможностью определения максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя. Состояние пользователя определяется устройством обнаружения. Первое устройство управления выполнено с возможностью вождения транспортного средства в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость. Второе устройство управления выполнено с возможностью питания от второго аккумулятора, установленного на транспортном средстве. Второе устройство управления выполнено с возможностью обращения к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем. Первое время равно необходимому периоду времени, исчисляемому с момента, когда показывается информация для побуждения пользователя начать ручное вождение с помощью средства управления вождением, до тех пор, пока пользователь не начнет ручное вождение. База данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, задана таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже чем максимально допустимая скорость, соответствующая первому состоянию пользователя, когда первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию. Второе устройство управления выполнено с возможностью определения первого времени, соответствующего обнаруженному состоянию пользователя. Второе устройство управления выполнено с возможностью включать представление информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством. Второе устройство управления выполнено с возможностью вождения транспортного средства в автономном режиме со времени переключения при скоростях, равных или меньших, чем максимально допустимая скорость во время переключения. Максимально допустимая скорость представляет собой такую скорость, при которой транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение. Второе время представляет собой продолжительность работы аккумулятора за вычетом первого времени. Продолжительность работы аккумулятора равна периоду времени, исчисляемому с момента, когда второй аккумулятор находится в полностью заряженном состоянии, до того времени, когда второй аккумулятор больше не может продолжать обслуживать второе устройство управления, не будучи зараженным. Второе устройство управления выполнено с возможностью остановки транспортного средства, если пользователь не начинает ручное вождение в течение периода со времени переключения до того, как истечет определенное первое время.
[0007] Например, продолжительность работы аккумулятора равна периоду времени с момента, в который первый аккумулятор становится непригодным для снабжения электроэнергией, до тех пор, как второй аккумулятор не может больше подавать электроэнергию на второе устройство управления в случае, когда второй аккумулятор продолжает подавать электроэнергию на второе устройство управления при максимальном потреблении энергии вторым устройством управления (значение, рассчитанное с учетом всех условий движения).
[0008] Для того, чтобы применить электронное устройство управления транспортным средством в соответствии с настоящим изобретением к транспортному средству, в транспортном средстве прежде всего обеспечивается как можно большее пространство, и в качестве второго аккумулятора используется устройство аккумулирования энергии, которое может быть размещено в этом пространстве. Затем максимально допустимая скорость для каждого состояния пользователя может быть определена в соответствии с емкостью второго аккумулятора. Например, когда монтажное пространство для второго аккумулятора в транспортном средстве относительно невелико, и продолжительность работы батареи второго аккумулятора относительно невелика, максимально допустимой скорости для каждого состояния пользователя присваиваются относительно небольшие значения. Как описано выше, когда первое устройство управления не может управлять транспортным средством, второе устройство управления может получать питание от второго аккумулятора малой емкости для торможения и остановки транспортного средства. Таким образом, согласно настоящему изобретению можно использовать второй аккумулятор с небольшой емкостью, и стоимость комплектующих деталей транспортного средства может быть снижена. Другими словами, электронное устройство управления транспортным средством в соответствии с настоящим изобретением также применимо к транспортному средству (малому транспортному средству), на котором может быть установлен только аккумулятор с относительно небольшой емкостью. То есть, электронное устройство управления транспортным средством в соответствии с настоящим изобретением является в высокой степени универсальным.
[0009] В электронном устройстве управления транспортным средством в соответствии с первым аспектом настоящего изобретения устройство обнаружения может содержать первое устройство обнаружения и второе устройство обнаружения. Первое устройство управления может быть выполнено с возможностью определения максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя. Состояние пользователя может определяться первым устройством обнаружения. Второе устройство управления может быть выполнено с возможностью определения первого времени, соответствующего состоянию пользователя, определенному вторым устройством обнаружения.
[0010] При такой конфигурации, даже если в первом устройстве обнаружения происходит сбой, второе устройство обнаружения может определить состояние пользователя, и, таким образом, второе устройство обнаружения может вести транспортное средство в автономном режиме.
[0011] Настоящее изобретение также относится к способу, который используется в электронном устройстве управления транспортным средством, и к носителю, предназначенному для долговременного хранения информации, хранящему компьютерную программу, которая выполняется электронным устройством управления транспортного средства.
[0012] Способ электронного управления транспортного средства в соответствии со вторым аспектом настоящего изобретения применяется к электронному устройству управления транспортного средства, содержащему: устройство обнаружения; первое устройство управления, выполненное с возможностью питания от первого аккумулятора, установленного на транспортном средстве; и второе устройство управления, выполненное с возможностью питания от второго аккумулятора, установленного на транспортном средстве. Способ электронного управления транспортным средством включает обнаружение с помощью устройства обнаружения состояния пользователя, сидящего на сиденье, где пользователь управляет средством управления вождением транспортного средства. Способ электронного управления транспортным средством содержит обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства с помощью первого устройства управления. Способ электронного управления транспортным средством содержит определение максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя, с помощью первого устройства управления. Состояние пользователя определяется устройством обнаружения. Способ электронного управления транспортным средством включает вождение транспортного средства в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость, с помощью первого устройства управления. Способ электронного управления транспортным средством содержит обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем с помощью второго устройства управления. Первое время равно необходимому периоду времени, исчисляемому с момента, когда показывается информация для принуждения пользователя начать ручное вождение с помощью средства управления вождением, до тех пор, пока пользователь не начнет ручное вождение. База данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, устанавливается таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, когда первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию. Способ электронного управления транспортным средством содержит определение первого времени, соответствующего обнаруженному состоянию пользователя, с помощью второго устройства управления. Способ электронного управления транспортным средством содержит включение представления информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством, с помощью второго устройства управления. Способ электронного управления транспортным средством включает вождение транспортного средства в автономном режиме с момента переключения при скоростях, равных или меньших, чем максимально допустимая скорость во время переключения, с помощью второго устройства управления. Максимально допустимая скорость представляет собой такую скорость, при которой транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение. Второе время равно продолжительности работы аккумулятора за вычетом первого времени. Продолжительность работы аккумулятора равна периоду времени, исчисляемому с момента, когда второй аккумулятор находится в полностью заряженном состоянии, до тех пор, как второй аккумулятор больше не может продолжать обсдуживать второе устройство управления, не будучи заряженным. Способ электронного управления транспортным средством включает остановку транспортного средства с помощью второго устройства управления, если пользователь не начинает ручное вождение в течение периода от времени переключения до того, как истечет определенное первое время.
[0013] Носитель, предназначенный для долговременного хранения информации, в соответствии с третьим аспектом настоящего изобретения, хранит инструкции, которые выполняются одним или несколькими процессорами, и которые заставляют один или несколько процессоров выполнять функции электронного устройства управления транспортным средством. Электронное устройство управления транспортным средством содержит устройство обнаружения; первое устройство управления, выполненное с возможностью питания от первого аккумулятора, установленного на транспортном средстве; и второе устройство управления, выполненное с возможностью питания от второго аккумулятора, установленного на транспортном средстве. Функции содержат обнаружение устройством обнаружения состояния пользователя, сидящего на сиденье, где пользователь управляет средством управления вождением транспортного средства. Функции содержат обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства с помощью первого устройства управления. Функции содержат определение с помощью первого устройства управления максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя. Состояние пользователя определяется устройством обнаружения. Функции содержат вождение транспортного средства в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость, с помощью первого устройства управления. Функции содержат обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем с помощью второго устройства управления. Первое время равно необходиому периоду времени, исчисляемому с момента, когда показывается информация для побуждения пользователя начать ручное вождение с помощью управления средством управления вождением, до тех пор, пока пользователь не начнет ручное вождение. База данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, устанавливается таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, когда первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию. Функции содержат определение первого времени, соответствующего обнаруженному состоянию пользователя, с помощью второго устройства управления. Функции содержат включение представления информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством, с помощью второго устройства управления. Функции содержат вождение транспортного средства в автономном режиме со времени переключения при скоростях, равных или меньших, чем максимально допустимая скорость во время переключения, с помощью второго устройства управления. Максимально допустимая скорость представляет собой такую скорость, при которой транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение. Второе время представляет собой продолжительность работы аккумулятора за вычетом первого времени. Продолжительность работы аккумулятора представляет собой период времени, исчисляемый с момента, когда второй аккумулятор находится в полностью заряженном состоянии, до тех пор, как второй аккумулятор больше не может продолжать обслуживание второго устройства управления, не будучи заряженным. Функции содержат остановку транспортного средства с помощью второго устройства управления, если пользователь не начинает ручное вождение в течение периода со времени переключения до того, как истечет определенное первое время.
[0014] Другие задачи, другие отличительные признаки и сопутствующие преимущества настоящего изобретения становятся легко понятными из следующего описания варианта осуществления настоящего изобретения, который приведен со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Отличительные признаки, преимущества и техническая и промышленная значимость иллюстративных вариантов осуществления данного изобретения будут раскрыты ниже со ссылкой на сопровождающие чертежи, на которых одинаковые знаки обозначают одинаковые элементы, и где:
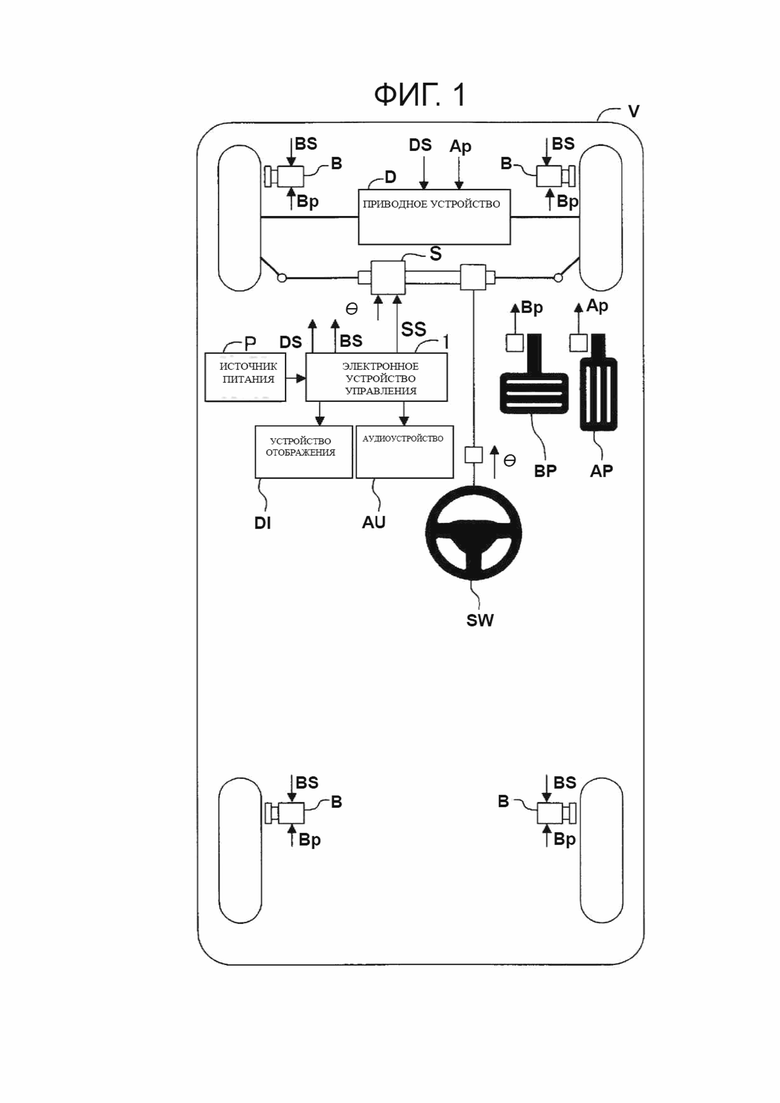
ФИГ. 1 представляет собой блок-схему транспортного средства, к которому применяется электронное устройство управления транспортным средством в соответствии с вариантом осуществления настоящего изобретения;
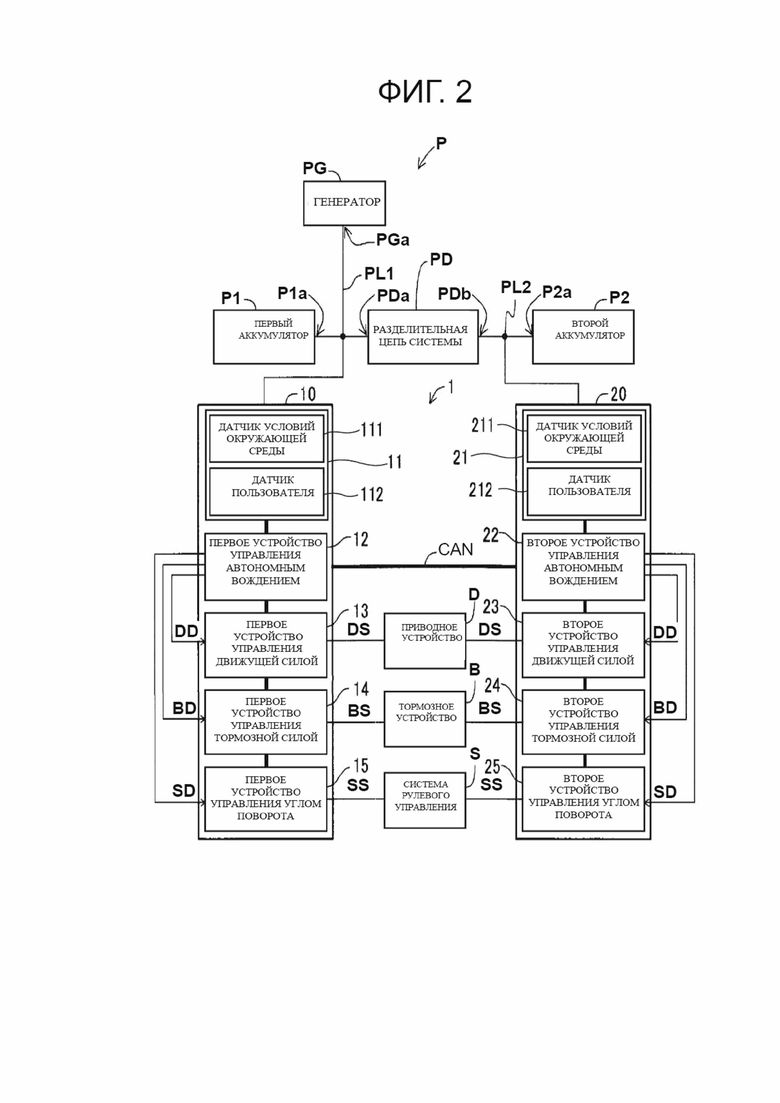
ФИГ. 2 представляет собой блок-схему электронного устройства управления транспортного средства, показанного на ФИГ. 1;
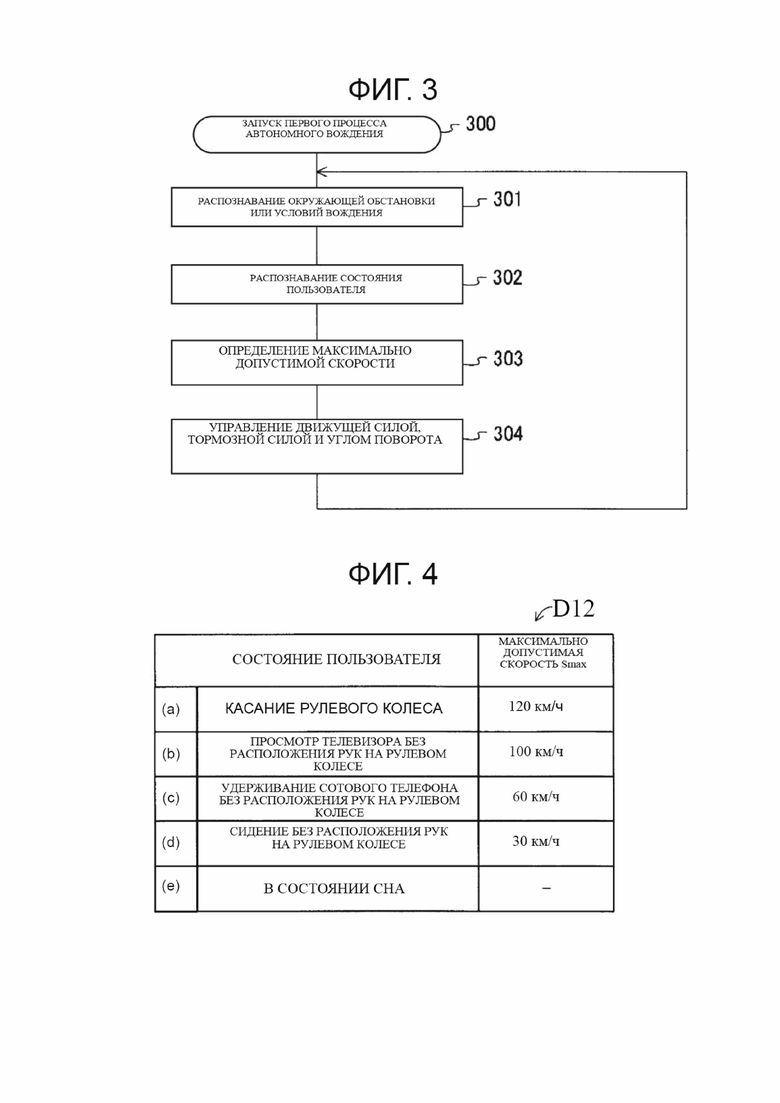
ФИГ. 3 представляет собой блок-схему первой программы автономного вождения транспортного средства;
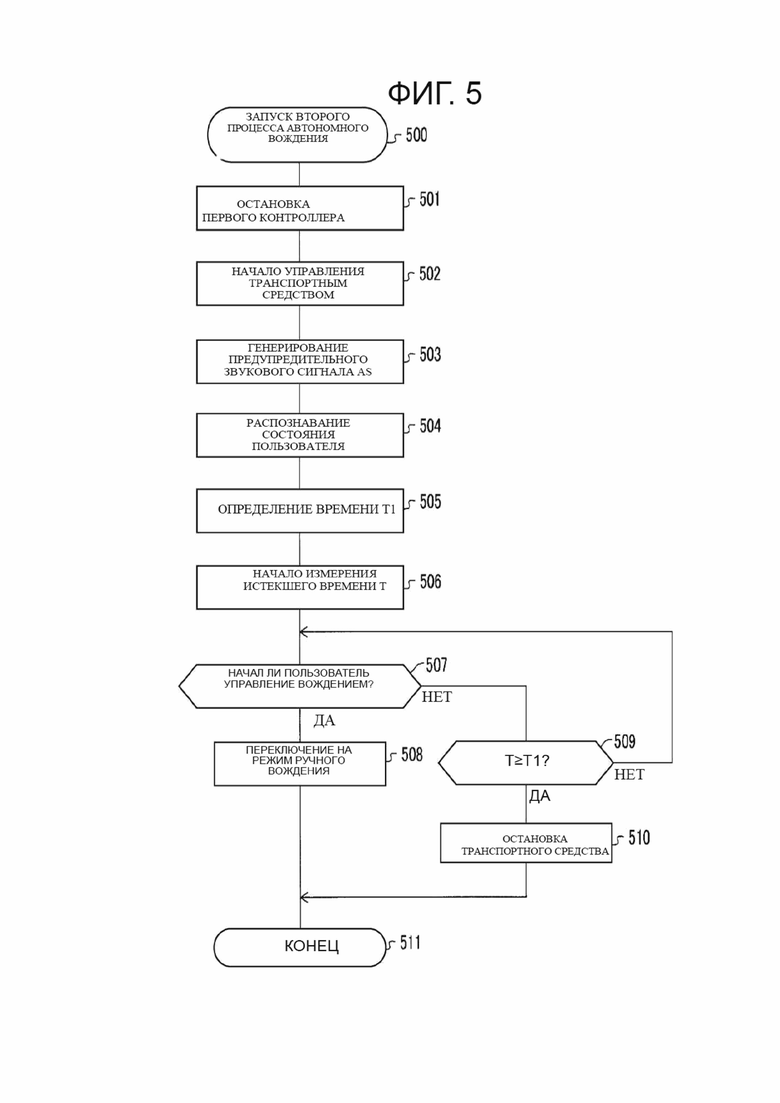
ФИГ. 4 представляет собой концептуальную схему первой базы данных;
ФИГ. 5 представляет собой блок-схему второй программы автономного вождения транспортного средства;
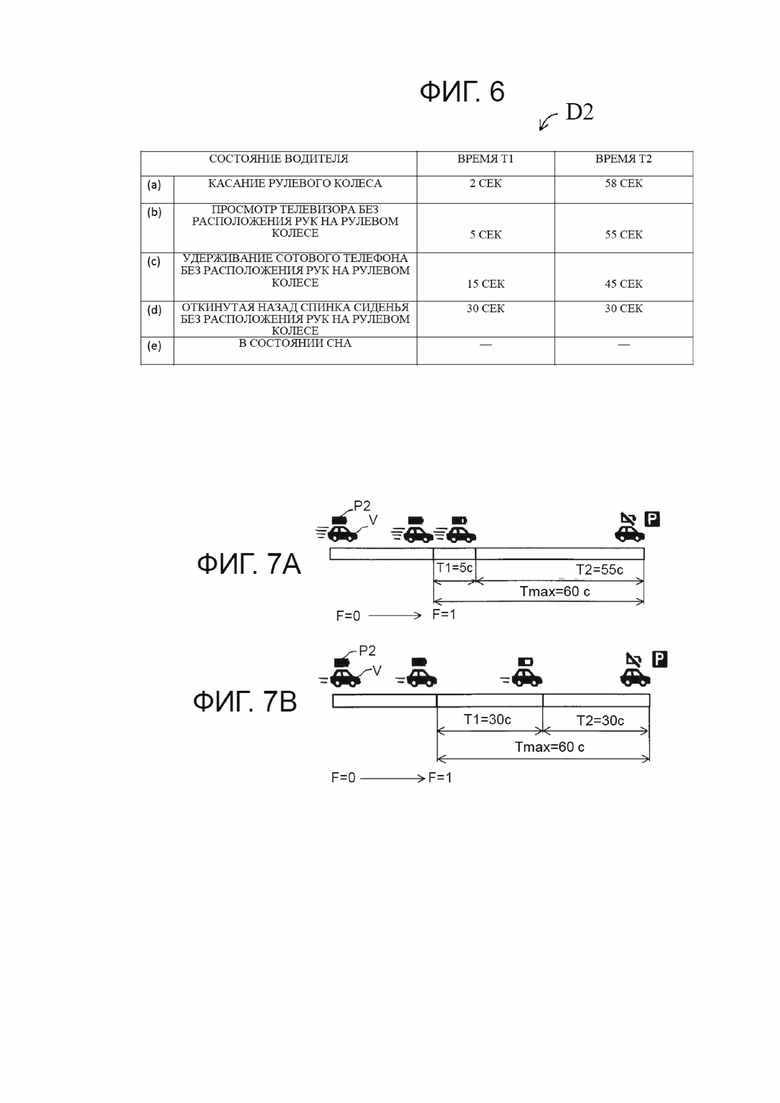
ФИГ. 6 представляет собой концептуальную схему второй базы данных;
ФИГ. 7A представляет собой концептуальную схему, показывающую процесс, в котором второй центральный процессор (ЦП) принимает управление транспортным средством от первого ЦП, чтобы остановить транспортное средство; и
ФИГ. 7B представляет собой концептуальную схему, показывающую процесс, в котором второй ЦП принимает управление транспортным средством от первого ЦП для остановки транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0016] Как показано на ФИГ. 1, электронное устройство 1 управления транспортным средством (устройство управления автономным вождением) 1, в соответствии с вариантом осуществления настоящего изобретения применяется к транспортному средству V. Транспортное средство V содержит приводное устройство D (двигатель, трансмиссию и т. д.), тормозное устройство B и систему рулевого управления S. Кроме того, транспортное средство V содержит педаль акселератора AP, педаль тормоза BP и рулевое колесо SW. Педаль акселератора AP, педаль тормоза BP и рулевое колесо SW являются средствами управления вождением для ручного управления приводным устройством D, тормозным устройством B и системой рулевого управления S, соответственно. Транспортное средство V дополнительно содержит устройство DI для отображения видео или изображения и аудиоустройство AU для генерирования звука.
[0017] Транспортное средство V управляется либо в режиме с ручным управлением, либо в режиме автономного управления. Режим с ручным управлением представляет собой режим работы, при котором пользователь транспортного средства V (водитель), управляет педалью акселератора AP, педалью тормоза BP и рулевым колесом SW для управления транспортным средством V в соответствии с механизмами их работы. Педаль акселератора AP, педаль тормоза BP и рулевое колесо SW соединены с приводным устройством D, тормозным устройством B и системой рулевого управления S, соответственно, посредством хорошо известной гидравлической системы. Приводное устройство D создает движущую силу в зависимости от степени действия (силы нажатия) Ap педали акселератора AP. Тормозное устройство B создает тормозное усилие в зависимости от степени действия (силы нажатия) Bp педали тормоза BP. Система рулевого управления S изменяет угол поворота в зависимости от степени действия (угла поворота) и рулевого колеса SW. Устройство (первый контроллер 10, который будет подробно описан ниже), являющееся частью электронного устройства 1 управления транспортным средством, может управлять, когда электронное устройство 1 управления транспортным средством может нормально функционировать в режиме с ручным управлением. Первый контроллер 10 может быть выполнен с возможностью помогать водителю при выполнении операций вождения (например, для снижения усилий действия операторов вождения).
[0018] Режим автономного управления представляет собой режим работы, в котором электронное устройство 1 управления транспортным средством управляет приводным устройством D, тормозным устройством B и системой рулевого управления S для вождения транспортного средства в автономном режиме V в сторону места назначения, указанного пользователем. То есть, приводное устройство D создает движущую силу в соответствии с управляющим сигналом DS. Тормозное устройство B генерирует тормозное усилие в соответствии с управляющим сигналом BS. Система рулевого управления S изменяет угол поворота в соответствии с управляющим сигналом SS. Поэтому пользователю не нужно управлять педалью акселератора AP, педалью тормоза BP, рулевым колесом SW и т. д. в режиме автономного управления. Пользователь транспортного средства V может переключить режим работы с режима с ручным управлением на режим автономного управления путем управления средством управления выбором режима работы (переключатель, сенсорная панель и т. д.), не показано. Кроме того, пользователь может переключить режим работы с режима автономного управления на режим с ручным управлением путем управления средством управления выбором режима работы.
[0019] В частности, главное электронное устройство управления (ЭБУ), не показано, следит за процессом переключения режима работы, который осуществляют с помощью средства управления выбором режима работы (процессом выбора режима работы, который осуществляет пользователь). Как только главное ЭБУ обнаруживает, что выбран режим автономного управления, главное ЭБУ дает команду электронному устройству 1 управления транспортным средством на управление приводным устройством D, тормозным устройством B и системой рулевого управления S для управления транспортного средства в автономном режиме V. Как только главное ЭБУ обнаруживает, что выбран режим движения с ручным управлением, главное ЭБУ дает электронному устройству 1 управления транспортным средством команду прекратить управление приводным устройством D, тормозным устройством B и системой рулевого управления S. В этом случае главное ЭБУ может дать команду электронному устройству 1 управления транспортным средством осуществить контроль для оказания помощи водителю в выполнении операций вождения. Как будет подробно описано далее, когда в электронном устройстве 1 управления транспортного средства происходит сбой (отказ), главное ЭБУ блокирует операцию переключения с режима движения с ручным управлением на режим автономного управления. Когда режим работы переключен, главное ЭБУ дает команду аудиоустройству AU генерировать заранее определенный звук и дает команду устройству отображения DI показать заранее определенное изображение.
[0020] Транспортное средство V дополнительно содержит источник питания P, который подает электроэнергию на электронное устройство 1 управления транспортным средством. Как показано на ФИГ. 2, источник питания P содержит генератор PG, первый аккумулятор P1, второй аккумулятор P2 и разделительную цепь системы PD.
[0021] Генератор PG приводится в действие приводным устройством D и вырабатывает электрическую энергию. Выходные клеммы PGa (положительная клемма и отрицательная клемма (опорный потенциал)) генератора PG подключены к цепи электрического питания PL1.
[0022] Первый аккумулятор P1 влючает хорошо известный свинцово-кислотный аккумулятор. Второй аккумулятор P2 включает хорошо известный литий-ионный аккумулятор. Емкость второго аккумулятора P2 меньше, чем емкость первого аккумулятора P1. Второй аккумулятор P2 меньше, чем первый аккумулятор P1. Второй аккумулятор P2 может содержать накопитель энергии, состоящий из конденсатора большой емкости (оксидно-электролитический алюминиевый конденсатор, двухслойный электрохимический конденсатор и т. д.).
[0023] Клеммы P1a (положительная клемма и отрицательная клемма) первого аккумулятора P1 подключены к цепи электрического питания PL1. Клеммы P2a (положительная клемма и отрицательная клемма) второго аккумулятора P2 подключены к цепи электрического питания PL2.
[0024] Разделительная цепь системы PD содержит хорошо известный преобразователь постоянного тока в постоянный ток (DC-to-DC), состоящий из схемы переключения, трансформатора и т. д. Клемма PDa цепи на первичной стороне (входной стороне) трансформатора преобразователя постоянного тока в постоянный ток, которая составляет разделительную цепь системы PD, подключена к цепи электрического питания PL1. Клемма PDb цепи на вторичной стороне (выходной стороне) трансформатора разделительной цепи системы PD подключена к цепи электрического питания PL2. То есть, разделительная цепь системы PD электромагнитно связывает систему электропитания (цепь электрического питания PL1) на стороне первого аккумулятора P1 и систему электропитания (цепь электрического питания PL2) на стороне второго аккумулятора P2. Разделительная цепь системы PD электрически изолирует друг от друга систему электрического питания на стороне первого аккумулятора P1 и систему электрического питания на стороне второго аккумулятора P2. Соответственно, например, даже если положительный и отрицательный электроды первого аккумулятора P1 короткозамкнутые, второй аккумулятор P2 почти не зависит от такого сбоя первого аккумулятора P1. Поэтому электроэнергия может подаваться на устройство (второй контроллер 20, который будет описан позже), подключенное к цепи электрического питания PL2. Разделительная цепь системы PD может содержать устройство, имеющее ту же функцию, что и преобразователь постоянного тока в постоянный ток, вместо преобразователя постоянного тока в постоянный ток. Примером устройства, имеющего ту же функцию, что и преобразователь постоянного тока в постоянный ток, является устройство, состоящее из реле, диода и т.д.
[0025] Выработка электроэнергии от генератора PG подается на первый аккумулятор P1 для зарядки первого аккумулятора P1. Выработка электроэнергии от генератора PG также подается на второй аккумулятор P2 через разделительную цепь системы PD для зарядки второго аккумулятора P2. Когда генератор PG не вырабатывает электрическую энергию, электрическая энергия первого аккумулятора P1 может подаваться на второй аккумулятор P2 через разделительную цепь системы PD для зарядки второго аккумулятора P2. Емкость второго аккумулятора P2 относительно невелика. Соответственно, количество электроэнергии, хранящейся во втором аккумуляторе P2, достигает своего максимального значения (полностью заряженного состояния) в относительно короткий срок после того, как запускается приводное устройство D транспортного средства V и начинает работу генератор PG.
[0026] Электронное устройство управления транспортным средством 1 содержит первый контроллер 10 и второй контроллер 20. Первый контроллер 10 и второй контроллер 20 подключены к шине связи CAN (шине обмена сообщениями автомобильных систем без участия бортового компьютера).
[0027] Первый контроллер 10 содержит первый датчик 11, первое устройство 12 управления автономным вождением, первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота. Первый датчик 11, первое устройство 12 управления автономным вождением, первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота подключены к шине связи CAN. Клеммы питания устройств, которые входят в состав первого контроллера 10, подключены к цепи электрического питания PL1. То есть, электрическая энергия первого аккумулятора P1 подается на первый датчик 11, первое устройство 12 управления автономным вождением, первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота через цепь электрического питания PL1.
[0028] Первый датчик 11 содержит датчик 111 условий окружающей среды. Датчик 111 условий окружающей среды получает данные для идентификации (распознавания) окружающей обстановки или условий вождения транспортного средства V. Датчик 111 условий окружающей среды содержит оптический датчик (цифровую камеру), радар, навигационную систему, датчик скорости транспортного средства и т. д. Оптический датчик фотографирует изображение дороги впереди транспортного средства V. Радар определяет расстояние до препятствия, находящегося около транспортного средства V. Навигационная система определяет текущее положение (широту и долготу) транспортного средства V. Датчик скорости транспортного средства определяет скорость транспортного средства V. Данные, представляющие результаты обнаружения каждого устройства, входящего в датчик 111 условий окружающей среды, подаются на первое устройство 12 управления автономным вождением через шину связи CAN.
[0029] Первый датчик 11 также содержит датчик 112 пользователя. Датчик 112 пользователя получает данные для идентификации (распознавания) состояния (позы, поведения и т. д.) пользователя транспортного средства V. В контексте данного документа пользователь относится к пользователю, сидящему на сиденье, где расположены педаль акселератора AP, педаль тормоза BP и рулевое колесо SW. Датчик 112 пользователя содержит оптический датчик (цифровую камеру), датчик сиденья, датчик касания и т. д. Оптический датчик фиксирует изображение пользователя. Датчик сиденья определяет угол наклона спинки сиденья. Датчик касания определяет, касается ли пользователь рулевого колеса SW. Датчик 112 пользователя может дополнительно содержать датчики, которые определяют степень действия Ap педали акселератора AP, степень действия Bp педали тормоза BP и степень действия и (угол поворота) рулевого колеса SW. Данные, представляющие результаты обнаружения каждого устройства, включенного в датчик 112 пользователя, подаются на первое устройство 12 управления автономным вождением через шину связи CAN.
[0030] Первое устройство 12 управления автономным вождением содержит микрокомпьютер, состоящий из арифметического блока (здесь и далее именуемого как «первый ЦП»), устройства хранения данных, таймера и т. д.
[0031] Первый ЦП имеет функцию самодиагностики для определения, произошел ли сбой в первой системе, которая состоит из первого аккумулятора P1 и первого контроллера 10. Когда приводное устройство D транспортного средства V запускается, первый ЦП устанавливает в исходное положение флаг ошибки F, предусмотренный при этом, на «0», указывая, что первая система находится в нормальном состоянии. Далее первый ЦП начинает контроль за выходным напряжением первого аккумулятора P1. Пока выходное напряжение первого аккумулятора P1 находится в пределах заранее определенного диапазона напряжения, первый ЦП не будет обновлять флаг ошибки F. Когда выходное напряжение первого аккумулятора P1 выходит за пределы заранее определенного диапазона напряжения, первый ЦП обновляет флаг ошибки F до «1», указывая на то, что в первой системе произошел сбой.
[0032] Первый ЦП также периодически посылает сигнал запроса отклика на первый датчик 11, первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота. Первый датчик 11, первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота выполнены с возможностью отправлять заранее определенный сигнал отклика в первый ЦП в течение заранее определенного времени после получения сигнала запроса отклика. Первый ЦП не будет обновлять флаг ошибки F, если первый ЦП получает сигналы отклика от первого датчика 11, первого устройства 13 управления движущей силой, первого устройства 14 управления тормозной силой и первого устройства 15 управления углом поворота в течение заранее определенного времени после того, как первый ЦП отправил сигнал запроса отклика. Первый ЦП обновляет флаг ошибки F до «1», если первый ЦП не сумел получить сигналы отклика от любого или нескольких из первого датчика 11, первого устройства 13 управления движущей силой, первого устройства 14 управления тормозной силой и первого устройства 15 управления углом поворота в течение заранее определенного времени после того, как первый ЦП отправил сигнал запроса отклика. Главное ЭБУ периодически считывает флаг ошибки F. Если флаг ошибки F равен «0», главное ЭБУ разрешает переключение режима работы. Если флаг ошибки F равен «1», главное ЭБУ запрещает операцию переключения из режима с ручным управлением на режим автономного управления по инициативе пользователя и не будет изменять режим работы.
[0033] Когда главное ЭБУ обнаруживает, что режим автономного управления был выбран пользователем (режим работы был переключен с режима с ручным управлением на режим автономного управления), при этом флаг ошибки F равен «0», главное ЭБУ дает первому ЦП команду выполнить первую программу автономного вождения, показанную на ФИГ. 3.
[0034] На этапе 300 первый ЦП запускает первый процесс автономного вождения. Затем первый ЦП запрашивает данные, представляющие собой зафиксированное изображение дороги впереди транспортного средства V, расстояние до препятствия, текущее положение транспортного средства V, скорость транспортного средства V и т. д. от датчика 111 условий окружающей среды. На этапе 301 первый ЦП идентифицирует (распознает) окружающую обстановку или условия вождения транспортного средства V (угол в градусах, на который изогнута полоса движения, положение транспортного средства V на полосе движения, дистанцию следования, наличие или отсутствие препятствий и т. д.) на основе указанных данных. После этого первый ЦП запрашивает данные, отображающие зафиксированное изображение пользователя, угол наклона спинки сиденья, касается ли пользователь рулевого колеса (SW) и т. д. от датчика 112 пользователя. На этапе 302 первый ЦП идентифицирует (распознает) состояние пользователя (посадку, поведение (например, изменение положения рук, изменение линии взгляда) и т. д.) на основе указанных данных.
[0035] В устройстве хранения данных первого устройства 12 управления автономным вождением хранится база данных D1, отображающая зависимость между состоянием пользователя и максимально допустимой скоростью Smax для автономного вождения, показанная на ФИГ. 4 в виде справочной таблицы (таблицы соответствия). Как будет подробно описано далее, когда первый контроллер 10 становится непригодным для управления транспортным средством V, второй контроллер 20 берет на себя управление транспортным средством V. Как только второй контроллер 20 начинает управление транспортным средством V, показывается информация для того, чтобы побудить пользователя начать управление средствами управления вождением. Требуется определенное количество времени, исчисляемое с момента, когда показывается эта информация, до того, как пользователь фактически начнет управление вождением транспортного средства V. Здесь и далее это время также просто обозначается как «время начала ручного вождения». Как показано на ФИГ. 4, относительно большое значение присвоено максимально допустимой скорости Smax, соответствующей состоянию пользователя, в котором «время начала ручного вождения относительно короткое» (см., например, (a) на ФИГ. 4). Относительно малое значение присвоено максимально допустимой скорости Smax, соответствующей состоянию пользователя, в котором «время начала ручного вождения относительно длительное» (см., например, (d) на ФИГ. 4). Время начала ручного вождения получают статистически. Значения, присвоенные максимально допустимой скорости Smax, соответствующей каждому состоянию в базе данных D1, не ограничиваются примером ФИГ. 4, и максимально допустимой скорости Smax могут быть присвоены другие значения. «Состояние пользователя» в базе данных D1 не ограничивается состояниями, показанными на ФИГ. 4, и может включать другие состояния.
[0036] Возвращаясь к ФИГ. 3, на этапе 303 первый ЦП обращается к базе данных D1 и определяет (считывает) максимально допустимую скорость Smax, соответствующую распознаваемому состоянию пользователя.
[0037] Затем первый ЦП управляет приводным устройством D, тормозным устройством B и системой рулевого управления S на этапе 304. В частности, первый ЦП устанавливает способ автономного вождения транспортного средства V (направление, в котором транспортному средству V следует двигаться (желаемое направление) и скорость, с которой транспортному средству V следует двигаться (желаемая скорость)), исходя из установленной окружающей обстановки или условий вождения и установленной максимально допустимой скорости Smax. В это время первый ЦП устанавливает желаемую скорость так, чтобы желаемая скорость не превышала максимально допустимую скорость Smax. Первый ЦП управляет первым устройством 13 управления движущей силой, первым устройством 14 управления тормозной силой и первым устройством 15 управления углом поворота так, чтобы транспортное средство V двигалось в установленном порядке. Первое устройство 13 управления движущей силой, первое устройство 14 управления тормозной силой и первое устройство 15 управления углом поворота, управляемые таким образом первым ЦП, управляют приводным устройством D, тормозным устройством B и системой рулевого управления S, соответственно. То есть, как показано на ФИГ. 3, первый ЦП составляет параметры необходимой величины, представляющие собой необходимую величину DD движущей силы, необходимую величину BD тормозной силы и необходимую величину SD угла поворота, соответственно, в зависимости от результатов распознавания. Первый ЦП предоставляет параметры необходимой величины первому устройству 13 управления движущей силой, первому устройству 14 управления тормозной силой и первому устройству 15 управления углом поворота. Затем программа возвращается к этапу 301.
[0038] Первое устройство 13 управления движущей силой генерирует управляющий сигнал DS в зависимости от необходимой величины DD движущей силы и подает управляющий сигнал DS на приводное устройство D. То есть, первое устройство 13 управления движущей силой управляет приводным устройством D так, чтобы движущая сила, вызванная приводным устройством D, соответствовала необходимой величине DD.
[0039] Первое устройство 14 управления тормозной силой генерирует управляющий сигнал BS в зависимости от необходимой величины BD тормозной силы и подает управляющий сигнал BS на тормозное устройство B. То есть, первое устройство 14 управления тормозной силой управляет тормозным устройством B так, чтобы тормозная сила, вызванная тормозным устройством B, соответствовала необходимой величине BD.
[0040] Первое устройство 15 управления углом поворота генерирует управляющий сигнал SS на основе необходимой величины SD угла поворота и подает управляющий сигнал SS на систему рулевого управления S. То есть, первое устройство 15 управления углом поворота управляет системой рулевого управления S так, чтобы угол поворота соответствовал необходимой величине SD.
[0041] Когда первый ЦП распознает, что пользователь спит на этапе 302, первый ЦП немедленно начинает «процесс торможения и остановки транспортного средства V».
[0042] Как будет подробно описано далее, если устанавливают, что в первой системе произошел сбой и что первый ЦП непригоден для управления транспортным средством V (когда флаг ошибки F равен «1»), второй контроллер 20 управляет транспортным средством V вместо первого контроллера 10. Второй контроллер 20 включает второй датчик 21, второе устройство 22 управления автономным вождением, второе устройство 23 управления движущей силой, второе устройство 24 управления тормозной силой и второе устройство 25 управления углом поворота. Эти устройства аналогичны первому датчику 11, первому устройству 12 управления автономным вождением, первому устройству 13 управления движущей силой, первому устройству 14 управления тормозной силой и первому устройству 15 управления углом поворота первого контроллера 10, соответственно. Второй датчик 21, второе устройство 22 управления автономным вождением, второе устройство 23 управления движущей силой, второе устройство 24 управления тормозной силой и второе устройство 25 управления углом поворота подключены к шине связи CAN. Клеммы питания устройств, которые составляют второй контроллер 20, подключены к цепи электрического питания PL2. То есть, электрическая энергия второго аккумулятора P2 подается на второй датчик 21, второе устройство 22 управления автономным вождением, второе устройство 23 управления движущей силой, второе устройство 24 управления тормозной силой и второе устройство 25 управления углом поворота через цепь электрического питания PL2.
[0043] В режиме автономного управления арифметический блок (здесь и далее именуемый как «второй ЦП») второго устройства 22 управления автономным вождением периодически считывает флаг ошибки F первого ЦП через шину связи CAN. Когда считанный флаг ошибки F равен «0», второй ЦП останавливает второе устройство 23 управления движущей силой, второе устройство 24 управления тормозной силой и второе устройство 25 управления углом поворота.
[0044] Когда флаг ошибки считывания F равен «1» или второй ЦП не сумел считать флаг ошибки F (когда первый ЦП не отвечает), второй ЦП выполняет вторую программу автономного вождения, показанную на ФИГ. 5. На этапе 500 второй ЦП запускает второй процесс автономного вождения. На этапе 501 второй ЦП посылает сигнал для приостановки первого устройства 13 управления движущей силой, первого устройства 14 управления тормозной силой и первого устройства 15 управления углом поворота, чтобы остановить эти устройства. Далее, на этапе 502, второй ЦП начинает управление транспортным средством V вместо первого ЦП. То есть, второй ЦП управляет вторым устройством 23 управления движущей силой, вторым устройством 24 управления тормозной силой и вторым устройством 25 управления углом поворота на основе данных, полученных от второго датчика 21, для управления транспортным средством V в автономном режиме. Максимально допустимая скорость Smax при этом равна скорости, когда второй ЦП принимает управление транспортным средством V от первого ЦП.
[0045] На этапе 503 второй ЦП дает команду аудиоустройству AU генерировать предупредительный звуковой сигнал AS, чтобы заставить пользователя привести в действие средства вождения для начала ручного вождения. Этот предупредительный звуковой сигнал может быть сообщением, озвучивающим «Пожалуйста, начните ручное вождение». В это же время второй ЦП может дать команду устройству отображения DI показать сообщение: «Пожалуйста, начните ручное вождение». То есть, второй ЦП предупреждает пользователя с помощью или визуальных, или акустических средств.
[0046] Требуется определенное количество времени, исчисляемого с момента, когда генерируется предупредительный звуковой сигнал AS, до того времени, когда пользователь готов осуществлять управление вождением транспортного средства V. Это время зависит от состояния пользователя, когда сгенерирован предупредительный звуковой сигнал AS. Поэтому второй ЦП ждет, пока пользователь начнет управление вождением, при этом управляя транспортным средством V в автономном режиме. В том случае, если пользователь не начинает управление вождением даже после того, как истекает заранее определенное первое время T1 в соответствии с состоянием пользователя, когда сгенерирован предупредительный звуковой сигнал AS, второй ЦП тормозит и останавливает транспортное средство V. Когда второй ЦП распознает, что пользователь спит, второй ЦП немедленно начинает «процесс торможения и остановки транспортного средства V».
[0047] В частности, на этапе 504 второй ЦП запрашивает данные, отображающие состояние пользователя, от датчика 212 пользователя и распознает состояние пользователя на основе указанных данных.
[0048] В устройстве хранения данных второго устройства 22 управления автономным вождением хранится база данных D2, отображающая зависимость между состоянием пользователя и первым временем T1, показанная на ФИГ. 6 в виде справочной таблицы (таблицы соответствия). Статистически полученные значения по умолчанию (например, средние значения) были присвоены первому времени T1, соответствующему каждому состоянию пользователя. На этапе 505 второй ЦП обращается к базе данных D2 и определяет (считывает) первое время T1, соответствующее распознаваемому состоянию пользователя. Значения, присвоенные первому времени T1, соответствующему каждому состоянию в базе данных D2, не ограничиваются примером ФИГ. 6, и первому времени T1 могут быть присвоены другие значения. «Состояние пользователя» в базе данных D2 не ограничивается состояниями, показанными на ФИГ. 6, и может включать другие состояния.
[0049] После этого, на этапе 506, второй ЦП начинает измерение истекшего времени T, исчисляемого с момента текущего времени с помощью таймера.
[0050] На этапе 507 второй ЦП запрашивает данные, отображающие состояние пользователя, от датчика 212 пользователя, и на основании указанных данных определяет, начал ли пользователь управление вождением. Если пользователь начал управление вождением (например, когда пользователь начал управление рулевым колесом SW (этап 507: Да)), второй ЦП дает команду главному ЭБУ переключить режим работы транспортного средства V на режим ручного вождения на этапе 508 и завершает второй процесс автономного вождения на этапе 511. То есть, в этом случае, даже если пользователь не управляет средством управления выбором режима, переключение режима работы на режим с ручным управлением включается пользователем, начинающим управление вождением. После этого второе устройство 23 управления движущей силой, второе устройство 24 управления тормозной силой и второе устройство 25 управления углом поворота останавливаются.
[0051] Если на этапе 507 пользователь не начал управление вождением (например, когда пользователь не касается рулевого колеса SW (этап 507: Нет)), второй ЦП на этапе 509 определяет, достигло ли истекшее время T установленного первого времени T1. Если истекшее время T еще не достигло первого времени T1 (этап 509: Нет), программа возвращается к этапу 507. Если истекшее время T достигло определенного первого времени T1 (этап 509: Да), второй ЦП останавливает транспортное средство V в течение заранее определенного второго времени T2, которое будет описано позже, на этапе 510. Например, второй ЦП перемещает транспортное средство V с полосы обгона на полосу движения, тормозя при этом транспортное средство V с постоянным или переменным замедлением (отрицательным ускорением). Затем второй ЦП перемещает транспортное средство V на обочину дороги и останавливает транспортное средство V на обочине дороги. Второй ЦП завершает второй процесс автономного вождения на этапе 511. Замедление в этом случае заранее устанавливается на такую величину, которая не вынуждает пользователя беспокоиться, не требует резко тормозить следующее за ним транспортное средство.
[0052] Второе время T2 равно продолжительности работы аккумулятора Tmax (например, «60 секунд», см. ФИГ. 7A и 7B) за вычетом первого времени T1 (T2 = Tmax - T1). Продолжительность работы аккумулятора Tmax равна максимальному времени до тех пор, как второй аккумулятор P2, который полностью заряжен и который больше не заряжается, не может больше продолжать обслуживать второй контроллер 20. То есть, второе время T2 равно времени, в течение которого второй контроллер 20 может эксплуатироваться при максимальной мощности второго аккумулятора P2 за вычетом количества электроэнергии, потребленной вторым контроллером 20 в течение первого времени T1. Соответственно, когда первое время T1 относительно короткое (например, «5 секунд»), находящееся в распоряжении время T2 для остановки транспортного средства V, относительно длительное (например, «55 секунд» (см. ФИГ. 7A)). Поэтому в данном случае максимально допустимой скорости Smax присвоена относительно большая величина (см. (a) на ФИГ. 4). С другой стороны, когда первое время T1 относительно длинное (например, «30 секунд»), находящееся в распоряжении время T2 для остановки транспортного средства V относительно короткое (например, «30 секунд» (см. ФИГ. 7B)). Поэтому максимально допустимой скорости Smax присвоена относительно небольшая величина, чтобы транспортное средство V могло быть остановлено за такое относительно короткое время T2, так, чтобы не заставлять беспокоиться пользователя, и так, чтобы не требовать резкого торможения следующего транспортного средства (см. (d) на ФИГ. 4).
[0053] Как описано выше, скорость, при которой первый ЦП автономно управляет транспортным средством V, ограничена значениями, равными или меньшими, чем максимально допустимая скорость Smax, в зависимости от состояния пользователя. Максимально допустимая скорость Smax равна максимальному значению скорости, при которой второй ЦП может остановить транспортное средство V (например, второй ЦП может затормозить и остановить транспортное средство V при постоянном замедлении) в течение второго времени T2, то есть в течение времени работы аккумулятора Tmax за вычетом первого времени T1, из скоростей в тот момент, когда второй ЦП начинает тормозить транспортное средство V. Для того чтобы применить электронное устройство управления транспортным средством 1, скомпонованное, как описано выше, к транспортному средству V, в транспортном средстве V прежде всего обеспечивается как можно большее пространство, и в качестве второго аккумулятора P2 используется устройство аккумулирования энергии, которое может быть размещено в этом пространстве. Затем определяют максимально допустимую скорость Smax для каждого состояния пользователя в зависимости от емкости второго аккумулятора P2. Например, когда транспортное средство V является небольшим транспортным средством и монтажное пространство для второго аккумулятора P2 относительно невелико, а продолжительность работы аккумулятора Tmax относительно мала, максимально допустимой скорости Smax для каждого состояния пользователя присваиваются относительно небольшие значения. Как описано выше, когда первый контроллер 10 не может управлять транспортным средством V, второй контроллер 20 может получать питание от второго аккумулятора P2 небольшой емкости для торможения и остановки транспортного средства V. Согласно настоящему варианту осуществления изобретения, поскольку в качестве второго аккумулятора P2 может использоваться устройство аккумулирования энергии небольшой емкости, стоимость комплектующих деталей транспортного средства V может быть снижена. Другими словами, электронное устройство управления транспортным средством 1 также применимо к небольшим транспортным средствам. То есть, электронное устройство управления транспортным средством 1 является в высокой степени универсальным. Модификации
[0054] Настоящее изобретение не ограничивается приведенным выше вариантом осуществления изобретения, и в пределах объема настоящего изобретения могут быть созданы различные модификации.
Первая модификация
[0055] Например, база данных D1 может быть доступной для редактирования потребителем (пользователем). В частности, когда пользователь увеличивает максимально допустимую скорость Smax для определенного состояния X в базе данных D1, второй ЦП уменьшает первое время T1 для этого состояния X в базе данных D2 в соответствии со степенью увеличения максимально допустимой скорости Smax. База данных D2 может быть доступной для редактирования потребителем. В частности, когда потребитель увеличивает первое время T1 для определенного состояния X в базе данных D2, первый ЦП уменьшает максимально допустимую скорость Smax для этого состояния X в базе данных D1 в соответствии со степенью увеличения первого времени T1. При такой конфигурации способ управления автономным вождением транспортного средства V с помощью первого ЦП и второго ЦП может быть изменен в соответствии с предпочтениями потребителя. Пример исполнения технического оснащения настоящего изобретения описан выше. Однако настоящее изобретение не ограничивается электронным устройством управления транспортным средством, но может представлять собой способ, который выполняется электронным устройством управления транспортным средством и машинно-читаемым носителем, предназначенным для долговременного хранения информации, хранящим инструкции, которые заставляют компьютер выполнять функции электронного устройства управления транспортным средством.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2668138C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754019C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И ИНТЕРФЕЙС УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2754020C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2774085C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753080C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2755428C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753082C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2755426C1 |
Электронное устройство управления транспортным средством содержит устройство обнаружения, выполненное с возможностью обнаруживать состояние пользователя, первое устройство управления и второе устройство управления. Второе устройство управления выполнено с возможностью обращаться к базе данных, определяющей зависимость между состоянием пользователя и первым временем, и управлять транспортным средством в автономном режиме при скоростях, равных или меньших, чем максимально допустимая скорость, со времени переключения, которое равно времени, при котором первое устройство управления становится непригодным для управления транспортным средством. Базу данных задают таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, если первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию. Достигается повышение надежности. 3 н. и 1 з.п. ф-лы, 8 ил.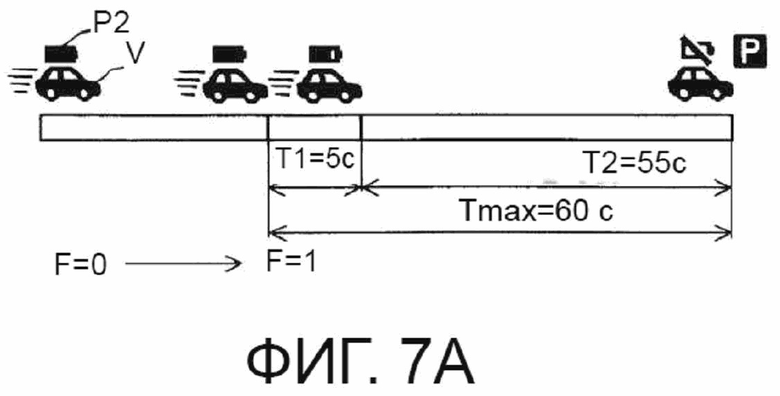
1. Электронное устройство управления транспортным средством, содержащее:
устройство обнаружения, выполненное с возможностью определять состояние пользователя, сидящего на сиденье, когда пользователь управляет средством управления вождением транспортного средства;
первое устройство управления, выполненное с возможностью:
получать питание от первого аккумулятора, установленного на транспортном средстве,
обращаться к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства,
определять максимально допустимую скорость транспортного средства, которая соответствует состоянию пользователя, причем состояние пользователя определяется указанным устройством обнаружения, и
управлять транспортным средством в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость; и
второе устройство управления, выполненное с возможностью:
получать питание от второго аккумулятора, установленного на транспортном средстве,
обращаться к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, причем первое время равно необходимому периоду времени, исчисляемому с момента, когда показывается информация для побуждения пользователя начать ручное вождение путем управления средством управления вождением, до тех пор, пока пользователь не начнет ручное вождение, и базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, установленным таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, если первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию,
определять первое время, соответствующее обнаруженному состоянию пользователя,
включать представление информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством,
управлять транспортным средством в автономном режиме со времени переключения при скоростях, равных или меньших, чем максимально допустимая скорость во время переключения, причем максимально допустимая скорость является такой скоростью, что транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение, причем второе время равно продолжительности работы аккумулятора за вычетом первого времени, а продолжительность работы аккумулятора равна периоду времени, исчисляемому с момента, когда второй аккумулятор находится в больше заряженном и полностью заряженном состоянии, до того времени, когда второй аккумулятор не может продолжать обслуживать второе устройство управления, не будучи заряженным, и
останавливать транспортное средство, если пользователь не начинает ручное вождение в течение периода времени со времени переключения до того, как истечет определенное первое время.
2. Электронное устройство управления транспортным средством по п. 1, где:
устройство обнаружения содержит первое устройство обнаружения и второе устройство обнаружения;
первое устройство управления выполнено с возможностью определять максимально допустимую скорость транспортного средства, которая соответствует состоянию пользователя, причем состояние пользователя определяется первым устройством обнаружения; и
второе устройство управления выполнено с возможностью определять первое время, соответствующее состоянию пользователя, определенному вторым устройством обнаружения.
3. Способ электронного управления транспортным средством, применимый к электронному устройству управления транспортным средством, содержащему устройство обнаружения, первое устройство управления, выполненное с возможностью получать питание от первого аккумулятора, установленного на транспортном средстве, и второе устройство управления, выполненное с возможностью получать питание от второго аккумулятора, установленного на транспортном средстве, причем способ электронного управления транспортным средством содержит:
обнаружение состояния пользователя, сидящего на сиденье, при помощи устройства обнаружения, где пользователь управляет средством управления вождением транспортного средства;
обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства при помощи первого устройства управления;
определение при помощи первого устройства управления максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя, причем состояние пользователя определяется при помощи устройства обнаружения;
вождение транспортного средства в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость, при помощи первого устройства управления;
обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем при помощи второго устройства управления, причем первое время равно необходимому периоду времени, исчисляемому с момента, когда показывается информация для побуждения пользователя начать ручное вождение путем управления средством управления вождением, до тех пор, пока пользователь не начнет ручное вождение, и базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, установленным таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, если первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию;
определение первого времени, соответствующего обнаруженному состоянию пользователя, при помощи второго устройства управления;
включение представления информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством, с помощью второго устройства управления;
вождение транспортного средства в автономном режиме со времени переключения при скоростях, равных или меньших, чем максимально допустимая скорость во время переключения, при помощи второго устройства управления, причем максимально допустимая скорость является такой скоростью, что транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение, причем второе время равно продолжительности работы аккумулятора за вычетом первого времени, а продолжительность работы аккумулятора равна периоду времени, исчисляемому с момента, когда второй аккумулятор находится в полностью заряженном состоянии, до тех пор, как второй аккумулятор больше не может продолжать обслуживать второе устройство управления, не будучи заряженным; и
остановку транспортного средства вторым устройством управления, если пользователь не начинает ручное вождение в течение периода времени со времени переключения до того, как истечет определенное первое время.
4. Носитель, предназначенный для долговременного хранения информации, хранящий инструкции, которые выполняемы одним или несколькими процессорами и которые заставляют один или несколько процессоров выполнять функции электронного устройства управления транспортным средством, указанного электронного устройства управления транспортным средством, в том числе устройства обнаружения, первого устройства управления, выполненного с возможностью получать питание от первого аккумулятора, установленного на транспортном средстве, и второго устройства управления, выполненного с возможностью получать питание от второго аккумулятора, установленного на транспортном средстве, причем функции содержат:
обнаружение с помощью устройства обнаружения состояния пользователя, сидящего на сиденье, где пользователь управляет средством управления вождением транспортного средства;
обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и максимально допустимой скоростью транспортного средства при помощи первого устройства управления;
определение первым устройством управления максимально допустимой скорости транспортного средства, которая соответствует состоянию пользователя, причем состояние пользователя определяется при помощи устройства обнаружения;
вождение транспортного средства в автономном режиме при скоростях, равных или меньших, чем определенная максимально допустимая скорость, при помощи первого устройства управления;
обращение к базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем при помощи второго устройства управления, причем первое время равно необходимому периоду времени, исчисляемому с момента, когда показывается информация для побуждения пользователя начать ручное вождение путем управления средством управления вождением, до тех пор, пока пользователь не начнет ручное вождение, и базе данных, которая заранее определяет зависимость между состоянием пользователя и первым временем, установленным таким образом, что максимально допустимая скорость, соответствующая второму состоянию пользователя, ниже, чем максимально допустимая скорость, соответствующая первому состоянию пользователя, если первое время, соответствующее второму состоянию, больше, чем первое время, соответствующее первому состоянию пользователя;
определение первого времени, соответствующего обнаруженному состоянию пользователя, при помощи второго устройства управления;
включение представления информации пользователю транспортного средства во время переключения, то есть момент времени, в который первое устройство управления становится непригодным для управления транспортным средством, с помощью второго устройства управления;
вождение транспортного средства в автономном режиме со времени переключения при скоростях, равных или меньших, чем максимально допустимая скорость, во время переключения при помощи второго устройства управления, причем максимально допустимая скорость является такой, что транспортное средство можно остановить в течение второго времени путем торможения транспортного средства при замедлении, абсолютное значение которого меньше, чем заранее определенное значение, причем второе время равно продолжительности работы аккумулятора за вычетом первого времени, а продолжительность работы аккумулятора равна периоду времени, исчисляемому с момента, когда второй аккумулятор находится в полностью заряженном состоянии, до тех пор, как второй аккумулятор больше не может продолжать обслуживать второе устройство управления, не будучи заряженным; и
остановку транспортного средства вторым устройством управления, если пользователь не начинает ручное вождение в течение периода времени со времени переключения до того, как истечет определенное первое время.
| US 2019315351 A1, 17.10.2019 | |||
| US 2019340090 A1, 07.11.2019 | |||
| KR 2020008532 5A, 14.07.2020. |

