[Область техники]
[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением для транспортного средства, которые включают в себя автономное управление движением.
[Уровень техники]
[0002]
Известно устройство помощи при удержании полосы движения, которое помогает рулевому управлению, чтобы двигаться по полосе движения, и останавливает помощь, когда величина рулевого управления водителя не меньше порогового значения определения отмены. В этом устройстве, когда удерживающая сила рулевого управления водителем для рулевого колеса (эта сила показывает, действительно ли крепко или легко водитель держит рулевое колесо) является большой, порог определения отмены изменяется на большое значение, тем самым улучшая как легкость отмены, так и эксплуатационные показатели системы (Патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP200909-214680A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако согласно вышеупомянутому предшествующему уровню техники порог определения отмены изменяется в зависимости только от величины силы удержания водителем рулевого колеса для рулевого колеса, и поэтому такое же управление выполняется независимо от сцены движения, такой как сцена, в которой желателен переход от автономного управления рулевым управлением системой к ручному управлению водителем или к сцене, в которой переход нежелателен. Таким образом, существует проблема в том, что невозможно ответить на запрос перехода в соответствии со сценой движения транспортного средства.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ управления движением и устройство управления движением для транспортного средства, которые способны реагировать на запрос перехода от автономного управления рулевым управлением к ручному управлению в соответствии со сценой движения транспортного средства.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает указанную выше проблему посредством установки множества пороговых значений отмены, соответствующих соответствующим сценам движения, извлечения порога отмены, соответствующего обнаруженной сцене движения, и определения на основе извлеченного порогового значения отмены, отменять ли автономное управление рулевым управлением, и перехода к ручному управлению водителем.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению множество пороговых значений отмены установлено в соответствии с соответствующими сценами движения, и поэтому можно ответить на запрос перехода от автономного управления рулевым управлением к ручному управлению в соответствии со сценой движения транспортного средства.
[Краткое описание чертежей]
[0008]
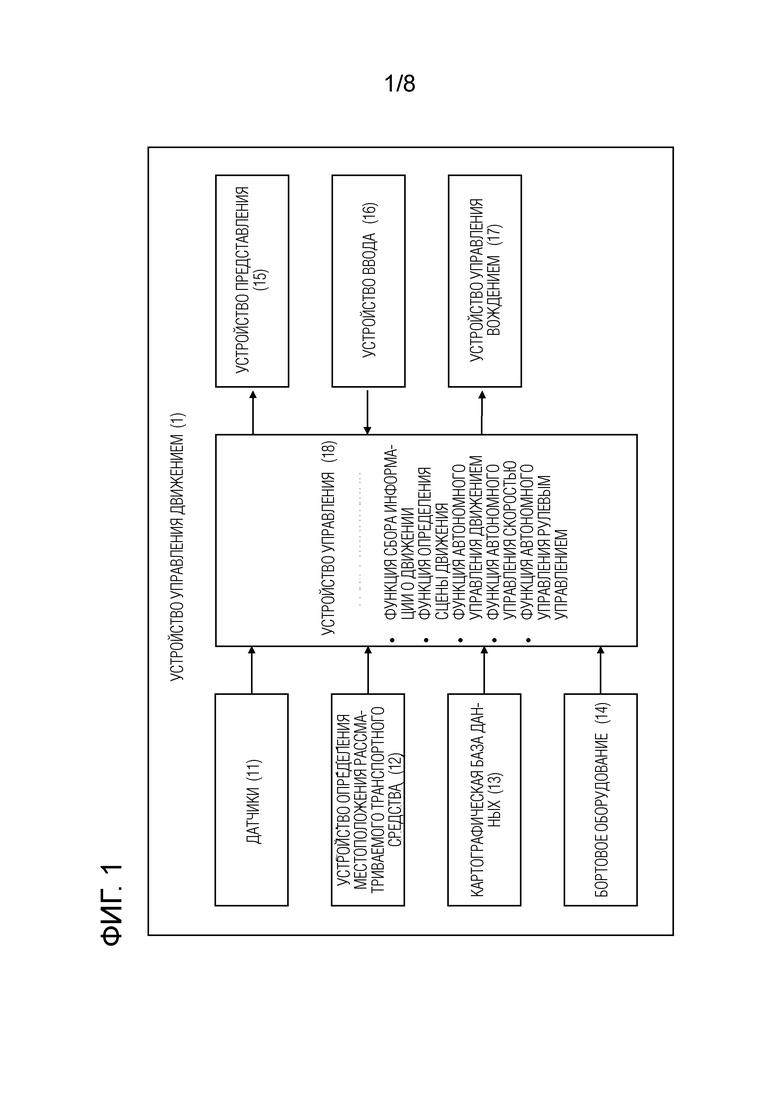
ФИГ. 1 представляет собой блок-схему, иллюстрирующую вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
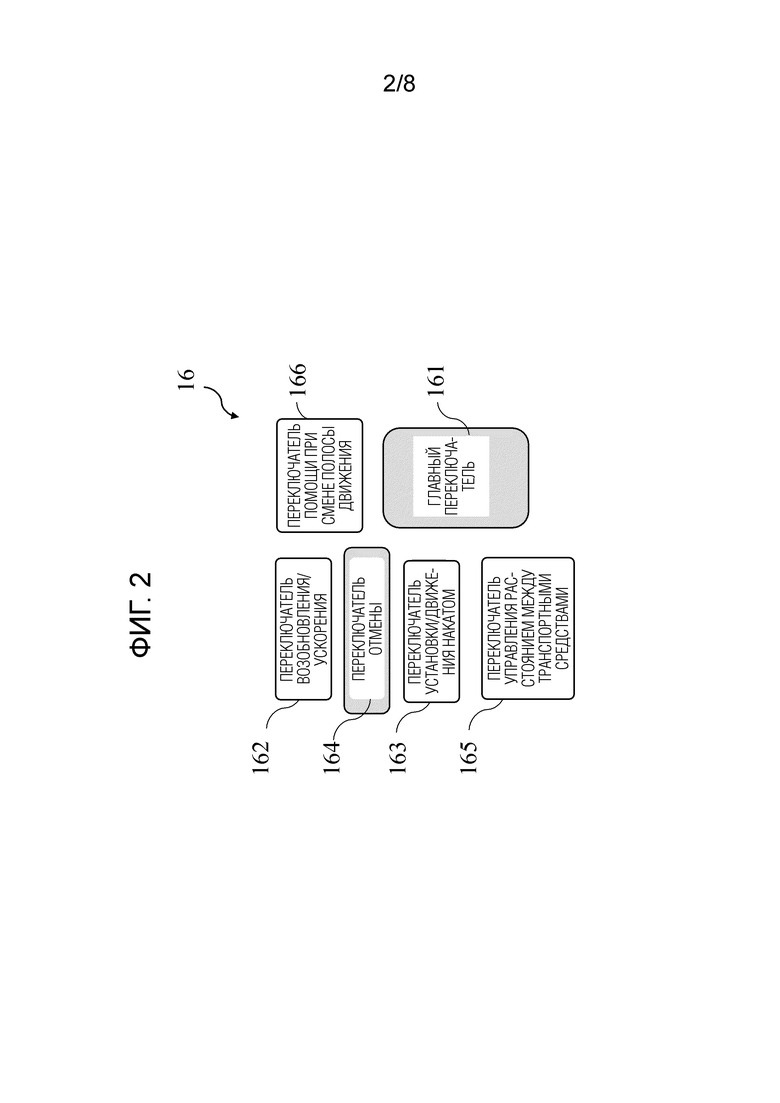
ФИГ. 2 - вид спереди, иллюстрирующий часть устройства ввода по фиг. 1.
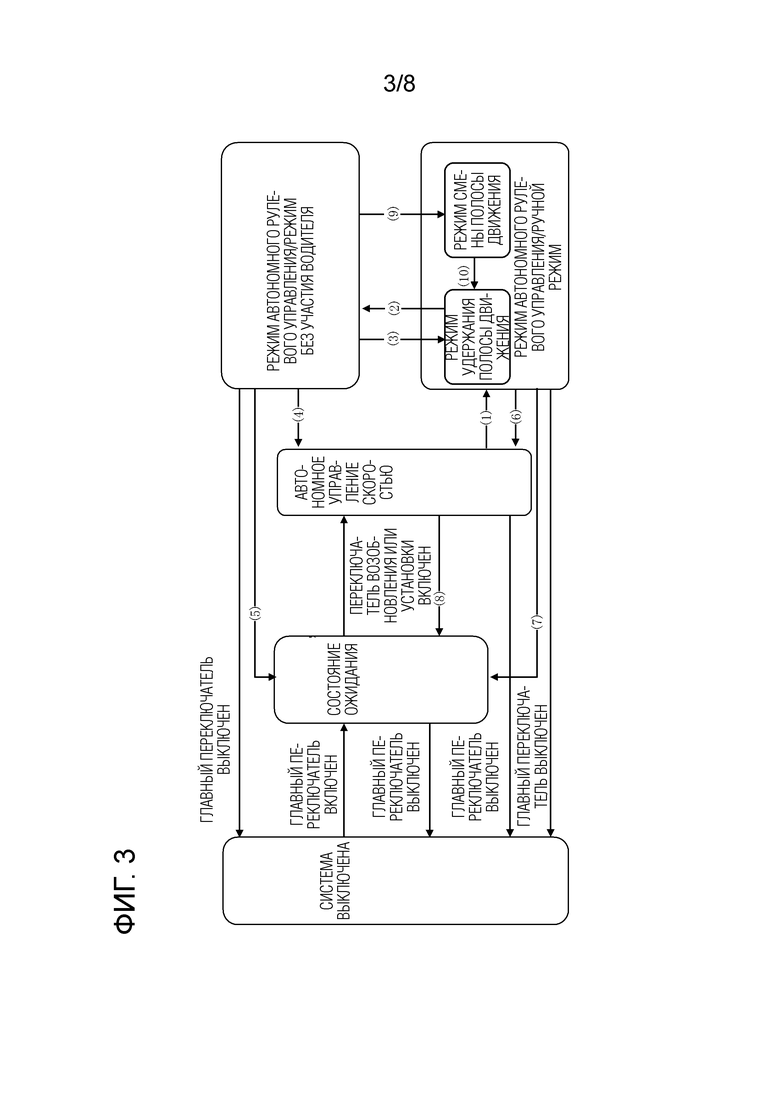
ФИГ. 3 - блок-схема, иллюстрирующая переход между состояниями устройства управления по фиг. 1.
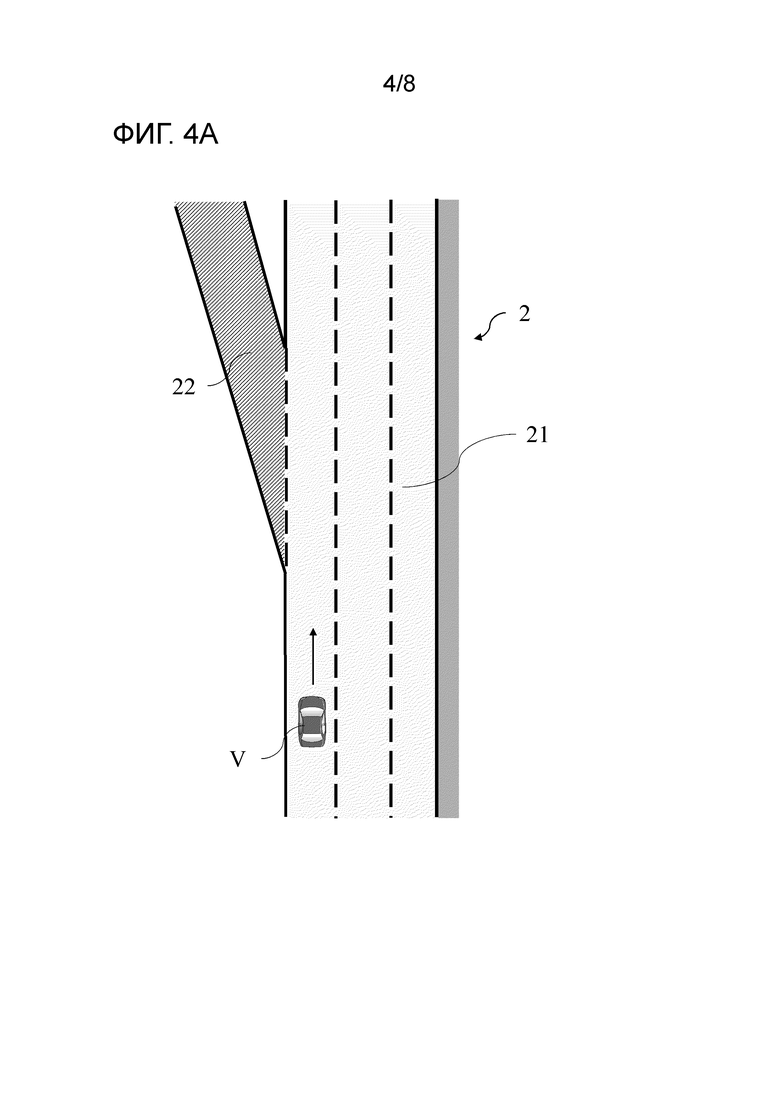
ФИГ. 4A - вид сверху, иллюстрирующий пример сцены движения (съезд с автомобильной дороги).
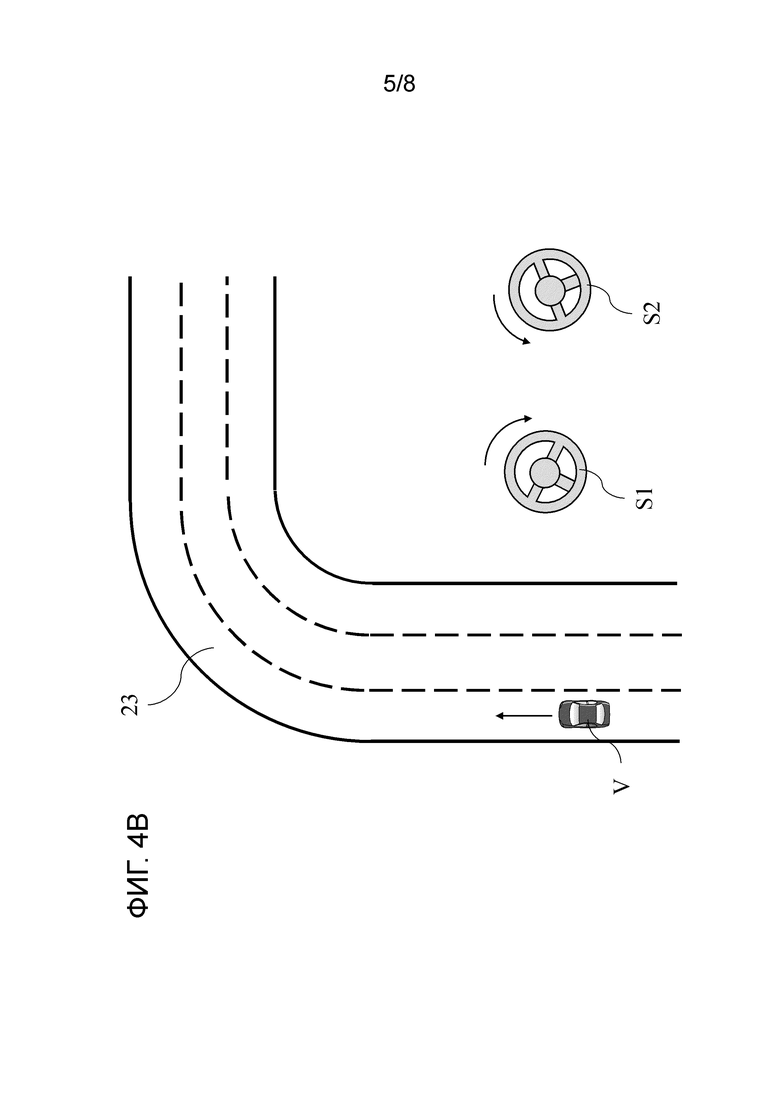
ФИГ. 4B - вид сверху, иллюстрирующий другой пример сцены движения (криволинейный маршрут).
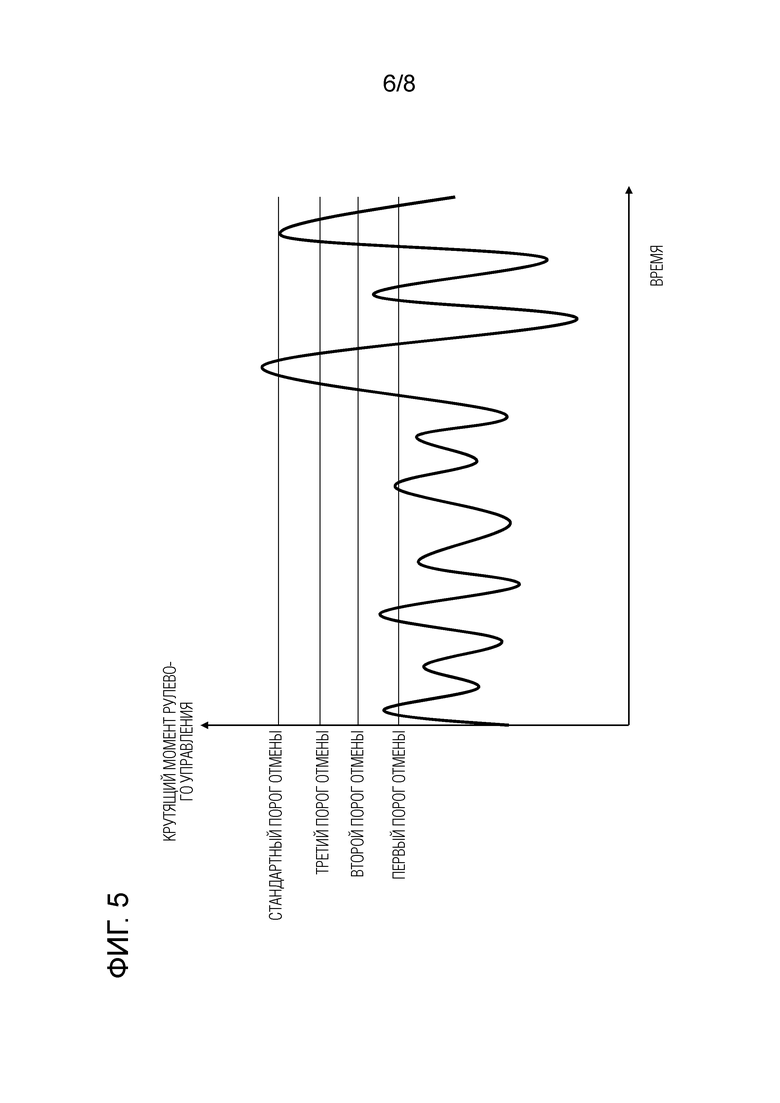
ФИГ. 5 - диаграмма, иллюстрирующая пороговое значение отмены для каждой сцены движения относительно крутящего момента рулевого управления, сохраненного в устройстве управления по фиг. 1.
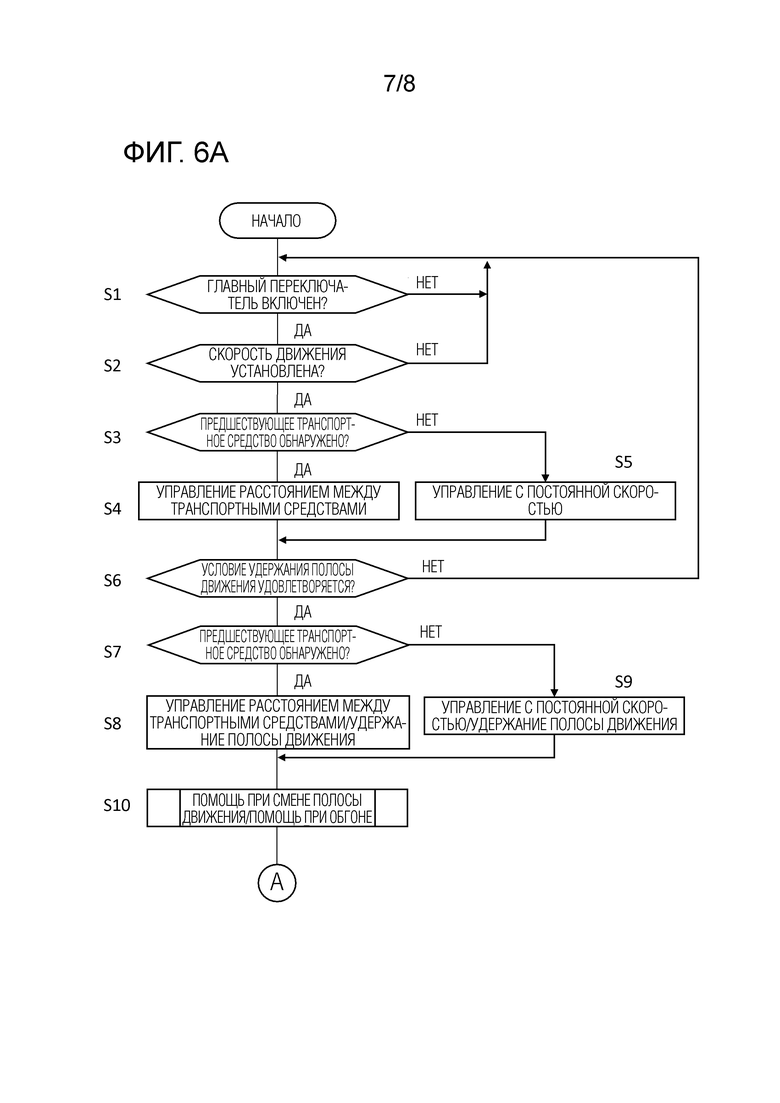
ФИГ. 6A - блок-схема (часть 1), иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
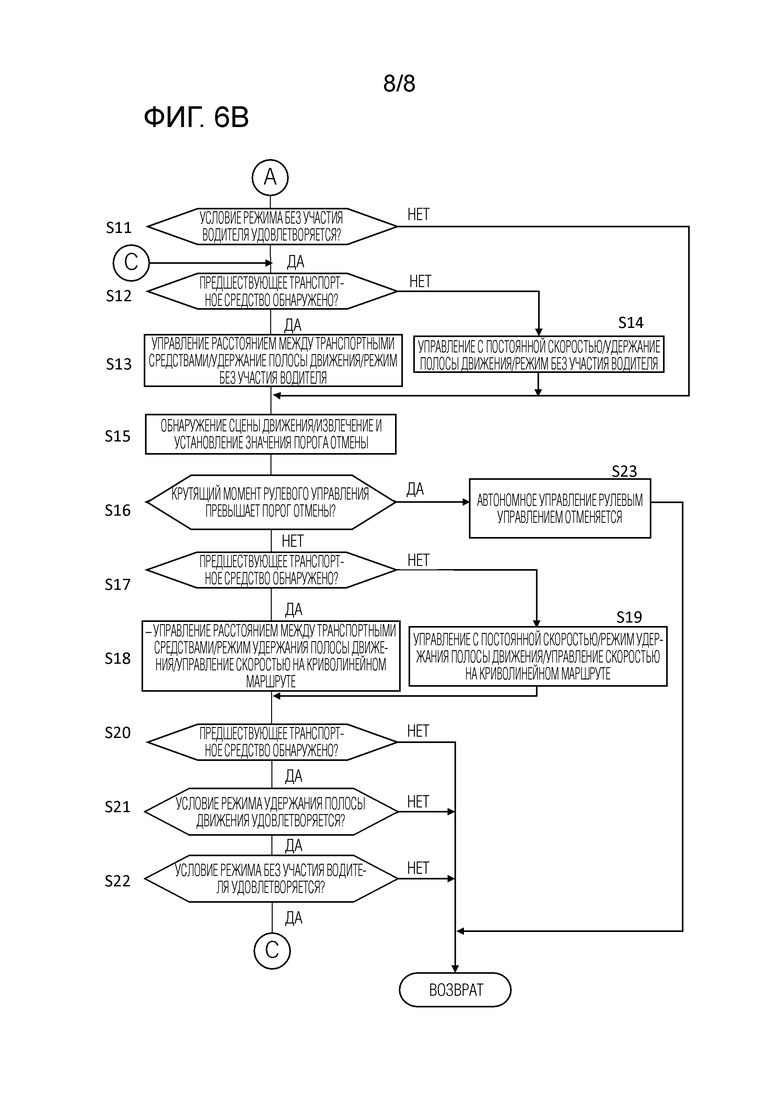
ФИГ. 6B - блок-схема (часть 2), иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
ФИГ. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 1 управления движением для транспортного средства согласно варианту осуществления настоящего изобретения. Устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления представляет вариант осуществления для выполнения способа управления движением для транспортного средства согласно настоящему изобретению. Как показано на фиг. 1, устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления включает в себя датчики 11, устройство 12 определения местоположения рассматриваемого транспортного средства, картографическую базу данных 13, бортовое оборудование 14, устройство 15 представления, устройство ввода 16, устройство 17 управления вождением и устройство управления 18. Эти устройства соединены друг с другом, например, через сеть контроллеров (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0010]
Датчики 11 обнаруживают состояние движения рассматриваемого транспортного средства. Примеры датчиков 11 включают, например, переднюю камеру, которая фиксирует изображения впереди рассматриваемого транспортного средства, заднюю камеру, которая фиксирует изображения позади рассматриваемого транспортного средства, передний радар, который обнаруживает препятствия впереди объекта съемки, задний радар, который обнаруживает препятствия позади рассматриваемого транспортного средства, боковые радары, которые обнаруживают препятствия, существующие с правой и левой стороны рассматриваемого транспортного средства, датчик скорости транспортного средства, который определяет скорость транспортного средства рассматриваемого транспортного средства, датчик, который определяет направление вращения рулевого колеса, датчик, определяющий крутящий момент рулевого управления, приложенный к рулевому колесу, датчик касания (датчик емкости), определяющий, держит ли водитель руль или нет, бортовая камера, фиксирующая изображения водителя, и т. д. Датчики 11 могут быть представлены одним из вышеописанных различных датчиков или также могут быть сконфигурированы как комбинация двух или более датчиков. Результаты обнаружения датчиков 11 выводятся в устройство 18 управления с предопределенными временными интервалами.
[0011]
Устройство 12 определения местоположения рассматриваемого транспортного средства состоит из блока GPS, гироскопа, датчика скорости транспортного средства и т.д. Устройство 12 определения местоположения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, используя блок GPS, чтобы периодически получать информацию о местоположении целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущее положение целевого транспортного средства на основе полученной информации о местоположении целевого транспортного средства, информацию об изменении угла, полученную от гироскопического датчика, и скорость транспортного средства, полученную от датчика скорости транспортного средства. Информация местоположения целевого транспортного средства, определяемая устройством 12 определения местоположения рассматриваемого транспортного средства, выводится в устройство 18 управления с предопределенными временными интервалами.
[0012]
Картографическая база данных 13 представляет собой память, которая хранит трехмерную высокоточную картографическую информацию, включая информацию о местоположении различных объектов и конкретных точек, и доступна с устройства 18 управления. Трехмерная высокоточная картографическая информация, хранящаяся в картографической базе данных 13, представляет собой трехмерную высокоточную картографическую информацию, основанную на форме дороги, обнаруженную при движении по реальной дороге с использованием транспортного средства для сбора данных, и, в трехмерной высокоточной картографической информации, подробные и высокоточные элементы информации о местоположении, такие как криволинейный маршрут и размер криволинейности (например, кривизна или радиус кривизны), точка слияния и точка ответвления дороги, пункт оплаты проезда, местоположение, в котором количество полос уменьшается, и зона обслуживания/зона парковки ассоциируются с картографической информацией как с трехмерной информацией.
[0013]
Бортовое оборудование 14 включает в себя различные модули, установленные в транспортном средстве, и управляется водителем. Примеры такого бортового оборудования включают в себя рулевое колесо, педаль акселератора, педаль тормоза, навигационное устройство, указатели поворота, дворники, фонари, звуковой сигнал и другие специальные переключатели. Когда водитель управляет бортовым оборудованием 14, информация о его работе выводится на устройство 18 управления.
[0014]
Устройство 15 представления представлено, например, такими устройствами, как дисплей навигационного устройства, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в измерительный блок, проекционный дисплей, проецируемый на лобовое стекло, динамик аудиоустройства и сиденье со встроенными вибрирующими телами. Устройство 15 представления информирует водителя информацией представления и информацией о смене полосы движения, что будет описано ниже, под управлением устройства 18 управления.
[0015]
Устройство 16 ввода представляет собой, например, устройство, такое как кнопочный переключатель или сенсорная панель, расположенная на экране дисплея, с помощью которой водитель может вводить информацию вручную, или микрофон, с помощью которого водитель может вводить информацию голосом. В настоящем варианте осуществления водитель может управлять устройством 16 ввода, тем самым вводя информацию установки в ответ на информацию представления, которая представлена устройством 15 представления. ФИГ. 2 является видом спереди, иллюстрирующим часть устройства ввода 16 настоящего варианта осуществления, и представляет пример, включающий в себя набор кнопочных переключателей, расположенных на части со спицами или подобном элементе рулевого колеса. Проиллюстрированное устройство ввода 16 включает в себя кнопочные переключатели, используемые при установке ВКЛ/ВЫКЛ функции автономного управления скоростью и функции автономного управления рулевым управлением устройства 18 управления, а кнопочные переключатели включают в себя главный переключатель (MAIN SW) 161, переключатель (RES +) возобновления/ускорения 162, переключатель установки/движения накатом (SET -) 163, переключатель отмены (CANCEL) 164, переключатель управления расстоянием между транспортными средствами (DISTANCE) 165 и переключатель помощи при смене полосы движения (L/C) 166.
[0016]
Главный переключатель 161 представляет собой переключатель для включения/выключения источника питания системы, который выполняет функцию автономного управления скоростью и функцию автономного управления рулевым управлением устройства 18 управления. Переключатель 162 возобновления/ускорения представляет собой переключатель для выключения работы функции автономного управления скоростью, а затем возобновления функции автономного управления скоростью на заданной скорости перед состоянием ВЫКЛ, для увеличения заданной скорости и/или для следования за предшествующим транспортным средством, чтобы остановиться, а затем перезапуститься. Переключатель 163 установки/движения накатом представляет собой переключатель для запуска функции автономного управления скоростью на скорости при движении и/или снижения установленной скорости. Переключатель 164 отмены является переключателем для выключения функции автономного управления скоростью. Переключатель 165 управления расстоянием между транспортными средствами - это переключатель для установки расстояния между транспортными средствами от предшествующего транспортного средства и, например, переключатель для выбора одного из множества этапов установки, таких как короткое расстояние/среднее расстояние/большое расстояние. Переключатель 166 помощи при смене полосы движения является переключателем для подачи команды (принятия) начала смены полосы движения, когда устройство 18 управления подтверждает начало смены полосы движения с водителем.
[0017]
Дополнительно или в качестве альтернативы набору кнопочных переключателей, показанных на фиг. 2, переключатели указателей поворота или другого бортового оборудования 14 также могут использоваться в качестве устройства ввода 16, и может быть принята конфигурация, при которой водитель включает переключатель указателей поворота в ответ на запрос от устройства 18 управления относительно того, выполнять ли смену полосы движения автоматически или автономно, и вводит согласие или разрешение на смену полосы движения. Информация о установке, вводимая устройством ввода 16, выводится на устройство 18 управления.
[0018]
Устройство 17 управления вождением управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство движется с постоянной установленной скоростью или движется, чтобы следовать за предшествующим транспортным средством, используя функцию автономного управления скоростью, устройство 17 управления вождением управляет работой приводного механизма (включая работу двигателя внутреннего сгорания в случае автомобиля с двигателем или работу электродвигателя для движения в случае электромобиля, а также включая распределение крутящего момента для двигателя внутреннего сгорания и электродвигателя для движения в случае гибридного автомобиля) и операцией торможения для достижения ускорения/замедления и скорости движения, так что скорость рассматриваемого транспортного средства становится установленной скоростью или, когда есть предшествующее транспортное средство, расстояние между транспортными средствами между рассматриваемым транспортным средством и предшествующим транспортным средством становится постоянным расстоянием. Дополнительно или в качестве альтернативы, когда функция автономного управления рулевым управлением используется для выполнения управления удержанием полосы движения для обнаружения маркеров полосы движения, по которой движется рассматриваемое транспортное средство (в дальнейшем также называемой полосой движения рассматриваемого транспортного средства) и управления положением движения транспортного средства рассматриваемое транспортное средство в направлении ширины дороги, так что рассматриваемое транспортное средство движется, например, в центре полосы движения рассматриваемого транспортного средства, или когда для объекта используются функция помощи при смене полосы движения, функция помощи при обгоне или функция помощи при движении по маршруту транспортное средство для выполнения автоматического управления сменой полосы движения, такого как обгон предшествующего транспортного средства или изменение направления движения, или когда функция помощи при повороте вправо или влево используется для управления движением для поворота вправо или влево на перекрестке и т.п. рулевое управление рассматриваемого транспортного средства выполняется посредством управления работой рулевого привода в дополнение к работе приводного механизма и тормозное действие для достижения ускорения/замедления и скорости движения. Устройство 17 управления вождением управляет движением рассматриваемого транспортного средства в соответствии с инструкциями от устройства 18 управления, которые будут описаны ниже. Любой из других известных способов также может использоваться в качестве метода управления движением, выполняемого устройством 17 управления вождением.
[0019]
Устройство 18 управления состоит из постоянной памяти (ПЗУ), в которой хранятся программы для управления движением рассматриваемого транспортного средства, центрального процессора (ЦП), который выполняет программы, хранящиеся в ROM, и оперативной памяти (RAM), который служит доступным запоминающим устройством. В качестве замены или в дополнение к ЦП можно использовать микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и т.п. как рабочая схема.
[0020]
Устройство 18 управления выполняет программы, хранящиеся в ПЗУ, с использованием ЦП, тем самым обеспечивая функцию сбора информации о движении для получения информации, касающейся состояния движения рассматриваемого транспортного средства, функцию определения сцены движения для определения сцены движения рассматриваемого транспортного средства и функция автономного управления движением для автономного управления скоростью движения и/или рулевого управления рассматриваемого транспортного средства (функция автономного управления движением включает в себя функцию автономного управления скоростью для автономного управления скоростью движения рассматриваемого транспортного средства и функцию автономного управления рулевым управлением для автономного управления рулевое управление рассматриваемого транспортного средства).
[0021]
Функция получения информации о движении устройства 18 управления является функцией, используемой для получения информации о движении, касающейся состояния движения рассматриваемого транспортного средства. Например, устройство 18 управления использует функцию получения информации движения для получения в качестве информации движения информации изображения внешней среды вокруг транспортного средства, захваченной передней камерой и задней камерой, включенными в датчики 11, и/или результатов обнаружения посредством переднего радара, заднего радара и боковых радаров, включенных в датчики 11. Дополнительно или в качестве альтернативы, устройство 18 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о скорости транспортного средства собственно рассматриваемого транспортного средства, определенную датчиком скорости транспортного средства, включенным в состав датчиков 11, и/или информацию изображения лица водителя, захваченную бортовой камерой, включенной в состав датчиков 11.
[0022]
Дополнительно или альтернативно, устройство 18 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении текущую информацию о местоположении рассматриваемого транспортного средства от устройства 12 определения местоположения рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, устройство 18 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении информацию о местоположении криволинейных маршрутов и размер криволинейности (например, кривизну или радиус кривизны), точки слияния дорог, точки разветвления, пункты оплаты проезда, местоположения, в которых количество полос уменьшается, зоны обслуживания (SA) / парковочные зоны (PA) и т.д. из картографической базы данных 13. Кроме того, устройство 18 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о работе с бортовым оборудованием 14, выполняемой водителем, от бортового оборудования 14.
[0023]
Функция определения сцены движения устройства 18 управления является функцией для обращения к таблице, хранящейся в ПЗУ устройства 18 управления, для определения сцены движения, в которой движется рассматриваемое транспортное средство. В таблице, хранящейся в ПЗУ устройства 18 управления, например, сцена движения, подходящая для смены полосы движения или обгона, и условия ее определения сохраняются для каждой сцены движения. Устройство 18 управления использует функцию определения сцены движения, чтобы обращаться к таблице, хранящейся в ПЗУ, и определять, является ли сцена движения рассматриваемого транспортного средства сценой движения, подходящей, например, для смены полосы движения или обгона.
[0024]
Предполагается, например, что четыре условия: «впереди идет предшествующее транспортное средство», «скорость транспортного средства предшествующего транспортного средства меньше установленной скорости транспортного средства рассматриваемого транспортного средства», «прибытие к предшествующему транспортному средству находится в пределах заранее определенного времени» и «направление смены полосы движения не является условием запрета смены полосы движения» устанавливаются в качестве условий определения для «сцены догона предшествующего транспортного средства ». В этом случае устройство 18 управления использует функцию определения места движения, чтобы определить, удовлетворяет ли рассматриваемое транспортное средство указанным выше условиям, например, на основе результатов обнаружения передней камерой и/или передним радаром, включенным в состав датчиков 11, скорость транспортного средства рассматриваемого транспортного средства, обнаруженная датчиком скорости транспортного средства, и информация о местоположении рассматриваемого транспортного средства, полученная устройством 12 определения положения рассматриваемого транспортного средства, и, когда вышеуказанные условия удовлетворены, определяет, что рассматриваемое транспортное средство находится в «сцена догона предшествующего транспортного средства».
[0025]
Функция автономного управления движением устройства 18 управления представляет собой функцию, используемую для автономного управления движением рассматриваемого транспортного средства без зависимости от действий водителя, и включает в себя функцию автономного управления скоростью, используемую для автономного управления скоростью движения рассматриваемого транспортного средства, и функцию автономного управления рулевым управлением, используемая для автономного управления рулевым управлением рассматриваемого транспортного средства. Функция автономного управления скоростью и функция автономного управления рулевым управлением настоящего варианта осуществления будут описаны ниже.
[0026]
«Функция автономного управления скоростью»
Функция автономного управления скоростью - это функция, используемая при обнаружении предшествующего транспортного средства для движения, чтобы следовать за предшествующим транспортным средством при выполнении управления расстоянием между транспортными средствами, чтобы поддерживать расстояние между транспортными средствами в соответствии со скоростью транспортного средства с верхним пределом. скорости транспортного средства, установленной водителем. Функция автономного управления скоростью также используется при обнаружении отсутствия предшествующего транспортного средства для выполнения движения с постоянной скоростью со скоростью транспортного средства, установленной водителем. Первое также называется контролем расстояния между транспортными средствами, а второе - также регулированием постоянной скорости. Функция автономного управления скоростью может включать в себя функцию, используемую при обнаружении ограничения скорости полосы движения с использованием функции сбора информации о движении для автоматического принятия скорости знака ограничения скорости в качестве установленной скорости транспортного средства.
[0027]
Чтобы активировать функцию автономного управления скоростью, водитель сначала приводит в действие переключатель 162 возобновления/ускорения или переключатель 163 установки/движения накатом устройства 16 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения. Например, когда переключатель 163 установки/движения накатом нажимается, когда рассматриваемое транспортное средство движется со скоростью 70 км/ч, текущая скорость движения устанавливается без каких-либо изменений, но если скорость, желаемая водителем, составляет 80 км/ч, возобновление Переключатель 162 возобновления/ускорения может быть нажат несколько раз для увеличения установленной скорости. Напротив, если скорость, желаемая водителем, составляет 60 км/ч, переключатель 163 установки/движения накатом можно нажимать множество раз для уменьшения установленной скорости. Расстояние между транспортными средствами, требуемое водителем, может быть выбрано, например, из множества этапов установок, таких как короткое расстояние/среднее расстояние/большое расстояние, путем приведения в действие переключателя 165 управления расстоянием между транспортными средствами устройства ввода 16, проиллюстрированного на ФИГ. 2.
[0028]
При управлении с постоянной скоростью, устройство 17 управления вождением управляет работой приводного механизма, такого как двигатель и тормоз, одновременно возвращая данные скорости транспортного средства, полученные датчиком скорости транспортного средства, чтобы поддерживать скорость движения, которая устанавливается посредством водителя. Это управление с постоянной скоростью выполняется при использовании датчиков 11, таких как передний радар, который обнаруживает препятствие впереди рассматриваемого транспортного средства, чтобы обнаруживать, что нет предшествующего транспортного средства впереди рассматриваемого транспортного средства на его полосе движения.
[0029]
При управлении расстоянием между транспортными средствами устройство 17 управления вождением управляет работой приводного механизма, такого как двигатель и тормоз, одновременно возвращая данные о расстоянии между транспортными средствами, обнаруженные датчиками 11 (передний радар), чтобы поддерживать расстояние между транспортными средствами, устанавливаемое водителем, с верхним пределом скорости движения, устанавливаемым водителем. Это управление расстоянием между транспортными средствами выполняется при использовании датчиков 11, таких как передний радар, который обнаруживает препятствие впереди рассматриваемого транспортного средства, чтобы обнаруживать, что впереди него находится транспортное средство, идущее по его полосе движения, и обнаруживать расстояние между транспортными средствами (в данном случае предшествующее транспортное средство является транспортным средством, расположенным непосредственно перед рассматриваемым транспортным средством). Если предшествующее транспортное средство останавливается, пока рассматриваемое транспортное средство движется под контролем расстояния между транспортными средствами, рассматриваемое транспортное средство также прекращает следовать за предшествующим транспортным средством, и если предшествующее транспортное средство трогается с места в течение 30 секунд после остановки рассматриваемого транспортного средства, рассматриваемое транспортное средство также начинает движение для повторного следования за предшествующим транспортным средством с помощью системы контроля расстояния между транспортными средствами. Если рассматриваемое транспортное средство останавливается более чем на 30 секунд, рассматриваемое транспортное средство не запускается автоматически или автономно, даже когда предшествующее транспортное средство запускается, и после того, как предшествующее транспортное средство стартует, рассматриваемое транспортное средство начинает движение, чтобы снова следовать за предшествующим транспортным средством с помощью управления расстоянием между транспортными средствами, когда нажат переключатель 162 возобновления/ускорения или педаль акселератора.
[0030]
Функция автономного управления скоростью по настоящему варианту осуществления может включать в себя, в дополнение к вышеописанному управлению с постоянной скоростью и управлению расстоянием между транспортными средствами, функцию управления скоростью на криволинейном маршруте, используемую для управления скоростью, чтобы иметь возможность двигаться со скоростью, соответствующей размеру кривой (например, кривизне или радиусу кривизны кривой) при движении по криволинейному маршруту. Эта функция управления скоростью на криволинейном маршруте является функцией управления скоростью при движении по криволинейному маршруту только в том случае, если работает функция автономного управления скоростью. Обнаруживается ли криволинейный маршрут впереди рассматриваемого транспортного средства таким образом, что, например, когда пункт назначения вводится в навигационное устройство и устанавливается маршрут к пункту назначения, определение выполняется со ссылкой на картографическую базу данных 13 относительно того, есть ли данные карты в виде криволинейного маршрута на маршруте.
[0031]
«Функция автономного управления рулевым управлением »
Функция автономного управления рулевым управлением - это функция, используемая для управления работой исполнительного механизма рулевого управления, тем самым выполняя управление рулевым управлением рассматриваемого транспортного средства. Эта функция автономного управления рулевым управлением включает в себя: функцию удержания полосы движения (функция поддержания ширины полосы движения), в которой рулевое управление управляется таким образом, чтобы двигаться, например, рядом с центром полосы движения, чтобы помочь рулевому управлению водителя; функция помощи при смене полосы движения, при которой, когда водитель управляет поворотным рычагом, рулевое управление управляется так, чтобы помогать работе рулевого колеса, необходимой для смены полосы движения; функция помощи при обгоне, при которой при обнаружении впереди транспортного средства, скорость которого ниже установленной, используется дисплей для подтверждения водителем, выполнять ли операцию обгона, и когда водитель нажимает переключатель приема, осуществляется управление рулевым управлением для помощи при обгоне; функция помощи при движении по маршруту, при которой, когда водитель вводит пункт назначения в навигационное устройство или подобное устройство и прибывает в точку смены полосы движения, необходимую для движения по маршруту, дисплей используется для подтверждения водителем того, следует ли выполнять изменение полосы, и когда водитель приводит в действие переключатель приема, рулевое управление управляется для помощи при смене полосы движения; и другие функции.
[0032]
ФИГ. 3 представляет собой блок-схему, иллюстрирующую переход между состояниями каждой функции, установленной в устройстве 18 управления. Система, показанная на чертеже, означает автономную систему управления движением, реализованную устройством 18 управления. Когда главный переключатель 161 на фиг. 2 включается из состояния ВЫКЛ системы, показанного на фигуре, система переходит в состояние ожидания. Из этого состояния ожидания автономное управление скоростью активируется путем включения переключателя 163 установки/движения накатом или переключателя 162 возобновления/ускорения по фиг. 2. Это позволяет начать вышеописанное управление с постоянной скоростью или управление расстоянием между транспортными средствами, и водитель может управлять рассматриваемым транспортным средством, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0033]
Во время выполнения автономного управления скоростью, когда условие (1) на фиг. 3 выполняется, режим переходит в режим удержания полосы движения автономного режима рулевого управления/ручного режима. Примеры условия (1) включают в себя, но не ограничиваются перечисленным, условие, при котором выполняются все следующие условия: обнаруживаются маркеры полосы движения с обеих сторон рассматриваемого транспортного средства; водитель держит руль; автомобиль движется по центру полосы движения; указатели поворота не работают; стеклоочиститель не работает на высокой скорости (HI); и когда предоставляется высокоточная карта, в пределах примерно 200 м впереди нет пункта пропуска, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается. Ручной режим относится к режиму, в котором автономное управление рулевым управлением не работает, если водитель не держит рулевое колесо, в то время как режим без участия водителя относится к режиму, в котором автономное управление рулевым управлением работает, даже когда водитель отпускает рулевое колесо.
[0034]
Во время выполнения режима удержания полосы движения автономного режима рулевого управления/ручного режима, когда условие (2) на фиг. 3 выполняется, режим переходит в режим удержания полосы движения автономного режима рулевого управления/режима без участия водителя. Примеры условия (2) включают, но не ограничиваются перечисленным, условие, при котором выполняются все следующие условия: рассматриваемое транспортное средство движется по автомобильной дороге; транспортное средство движется по дороге, конструктивно отделенной от встречной полосы; транспортное средство движется по дороге, для которой подготовлена высокоточная карта; транспортное средство движется со скоростью не выше установленной; сигналы GPS эффективны; водитель держит руль; водитель смотрит вперед; в пределах 800 м впереди нет дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается; в пределах 500 м впереди нет резкого поворота 100R или меньше; транспортное средство не движется по туннелю, превышающему 500 м от входа в туннель; и педаль акселератора не нажата.
[0035]
Напротив, во время выполнения режима удержания полосы движения автономного режима рулевого управления/режима без участия водителя, когда условие (3) на фиг. 3 выполняется, режим переходит в режим удержания полосы движения автономного режима рулевого управления/ручного режима. Примеры условия (3) включают, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: рассматриваемое транспортное средство движется по дороге, отличной от автомобильной дороги; транспортное средство движется по участку с двусторонним движением; транспортное средство движется по дороге, для которой не подготовлена высокоточная карта; автомобиль движется со скоростью выше установленной; сигналы GPS больше не принимаются; водитель не смотрит вперед в течение 5 секунд после срабатывания сигнализации прямого взгляда; камера монитора водителя больше не может обнаружить водителя; в пределах 800 м впереди есть любой из дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается; при движении со скоростью транспортного средства менее примерно 40 км/ч имеется крутой поворот 100R или менее в пределах примерно 200 м впереди; при движении со скоростью около 40 км/ч или более впереди на расстоянии около 200 м имеется резкий поворот 170R или менее; транспортное средство движется по туннелю, превышающему 500 м от входа в туннель; водитель нажал на педаль акселератора, удерживая руль; и сработала тревога приближения.
[0036]
Во время выполнения режима удержания полосы движения автономного режима рулевого управления/режима без участия водителя, когда условие (4) на фиг. 3 выполняется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (4) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: маркеры полосы движения с обеих сторон рассматриваемого транспортного средства больше не обнаруживаются в течение определенного периода времени; водитель управлял рулевым колесом (так называемая операция блокировки/вмешательства); и стеклоочиститель ветрового стекла работал на высокой скорости (HI). Во время выполнения режима удержания полосы движения в режиме автономного рулевого управления/режиме без участия водителя, когда условие (5) на фиг. 3 выполняется, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (5) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в положение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система транспортного средства выключена; противоскользящая тормозная система сработала; включен режим снега; сработал аварийный тормоз; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за контроля скорости транспортного средства; передняя камера обнаружила плохую видимость, например, неспособность правильно распознать объект из-за грязи, подсветки, дождя/туман и т.п.; передний радар обнаружил экранирование или радиопомехи; передний радар обнаружил отклонение оси; боковой радар обнаружил экранирование или радиопомеху; и боковой радар обнаружил отклонение оси.
[0037]
Во время выполнения автономного режима рулевого управления/ручного режима, когда условие (6) на фиг. 3 выполняется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (6) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: маркеры полосы движения с обеих сторон рассматриваемого транспортного средства больше не обнаруживаются; водитель задействовал рулевое колесо (так называемая операция блокировки/вмешательства); водитель включил указатели поворота; стеклоочиститель сработал на высокой скорости (HI); транспортное средство прибыло на пункт взимания платы за проезд при составлении высокоточной карты; и передняя камера обнаружила плохую видимость, например невозможность правильно распознать объект из-за грязи, подсветки, дождя/тумана и т.п. Во время выполнения режима автономного управления рулевым управлением/ручного режима, когда условие (7) на фиг. 3 выполняется, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (7) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в положение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система транспортного средства выключена; противоскользящая тормозная система сработала; включен режим снега; аварийный тормоз сработал; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за управления скоростью транспортного средства; передний радар обнаружил экранирование или радиопомехи; и передний радар обнаружил отклонение оси.
[0038]
Во время выполнения автономного управления скоростью, когда условие (8) на фиг. 3 выполняется, управление переходит в состояние ожидания. Примеры условия (8) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: водитель нажал на тормоз; водитель задействовал переключатель 164 отмены по фиг. 2; открылась одна или несколько дверей рассматриваемого транспортного средства; ремень безопасности водителя был отпущен; датчик сиденья обнаружил, что водителя больше нет на сиденье водителя; рычаг выбора перешел в положение, отличное от «D» или «M»; стояночный тормоз задействован; противоскользящая тормозная система транспортного средства выключена; противоскользящая тормозная система сработала; включен режим снега; аварийный тормоз сработал; состояние остановки продолжается около 3 минут после остановки транспортного средства из-за управления скоростью транспортного средства; передний радар обнаружил экранирование или радиопомехи; и передний радар обнаружил отклонение оси.
[0039]
Во время выполнения режима удержания полосы движения автономного режима рулевого управления/режима без участия водителя, когда условие (9) на фиг. 3 выполняется, режим переходит в режим смены полосы движения автономного режима рулевого управления/ручного режима. Примеры условия (9) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: когда система предложила смену полосы движения, водитель нажал переключатель 166 помощи при смене полосы движения по фиг. 2; и водитель включил указатели поворота.
[0040]
Во время выполнения режима смены полосы движения автономного режима рулевого управления/ручного режима, когда условие (10) на фиг. 3 выполняется, режим переходит в режим удержания полосы движения автономного режима рулевого управления/ручного режима. Примеры условия (10) включают в себя, но не ограничиваются перечисленным, условие, при котором удовлетворяется любое из следующих условий: ограничение скорости было превышено до начала выполнения смены полосы движения (далее сокращенно LCP); водитель нажал на педаль акселератора, удерживая руль до запуска LCP; LCP больше не может быть запущен в течение 10 секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся автомобиль; LCP больше не может быть запущен, и транспортное средство подошло слишком близко к точке разветвления после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения для движения по маршруту; маневр по смене полосы движения (далее сокращенно LCM) больше не может быть начат в течение 5 секунд после срабатывания LCP; скорость транспортного средства упала ниже 50 км/ч после запуска LCP и до запуска LCM; на соседней полосе больше нет места, необходимого для смены полосы движения после работы с LCP и перед запуском LCM; водитель выполнил операцию отмены перед запуском LCM; маркеры дорожек больше не могут быть обнаружены до запуска LCM; перед запуском LCM было определено, что нет соседней полосы движения в направлении смены полосы движения или что на определенном расстоянии впереди не будет смежной полосы движения; перед запуском LCM было определено, что впереди на определенном расстоянии имеется кривая с радиусом кривизны 250 м или менее; перед запуском LCM было определено, что на определенном расстоянии впереди есть участок, на котором тип разметки полосы движения запрещает смену полосы движения на соседнюю полосу; боковой радар обнаружил экранирование или радиопомехи перед запуском LCM; боковой радар обнаружил отклонение оси до запуска LCM; сработала ручная сигнализация (это условие устанавливается, когда выполняется одно из следующих условий: водитель не удерживает рулевое колесо в течение примерно 2 секунд после срабатывания LCP; водитель не удерживает рулевое колесо в течение примерно 2 секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся автомобиль; и водитель не удерживает рулевое колесо в течение примерно 2 секунд после нажатия переключателя 166 помощи при смене полосы движения во время предложения смены полосы движения для движения по маршруту); водитель выключил указатели поворота; и LCP была завершена.
[0041]
Система выключается, когда главный переключатель 161 выключен в любом из автономного режима рулевого управления/режима без участия водителя, автономного рулевого управления/ручного режима, автономного управления скоростью и состояния ожидания.
[0042]
Во время выполнения автономного управления рулевым управлением (ручной режим или режим без участия водителя) в вышеописанном переходе между состояниями, когда выполняется условие, что водитель управлял рулевым колесом в условии (4) или (6), автономное управление рулевым управлением отключается (отменяется) и переходит в автономное управление скоростью с помощью рулевого колеса водителя. Обнаружение того, управлял ли водитель рулевым колесом, выполняется с помощью датчика крутящего момента, который определяет крутящий момент рулевого управления, приложенный к рулевому колесу, и когда обнаруженный крутящий момент рулевого управления превышает предварительно установленный порог отмены, выполняется определение: сделал, чтобы водитель управлял рулевым колесом. Операция вмешательства водителя для отмены автономного управления рулевым управлением и перехода к ручному управлению водителем не ограничивается операцией вращения рулевого колеса и также может быть операцией кнопки вмешательства или тому подобного.
[0043]
В настоящем варианте осуществления множество порогов отмены установлено в соответствии с соответствующими сценами движения. То есть порог отмены устанавливается на относительно небольшое значение в случае сцены движения, в которой желателен переход от автономного управления рулевым управлением к ручному управлению водителем, в то время как порог отмены устанавливается на относительно большое значение в случае сцены движения, в которой переход нежелателен. Например, фиг. 4A представляет собой вид сверху, иллюстрирующий главную дорогу 21 и выездную дорогу 22 автомобильной дороги 2, имеющей три полосы движения с каждой стороны, и предполагается, что главная дорога 21 представляет область, для которой подготовлена трехмерная высокоточная картографическая информация, в то время как выездная дорога 22 и последующие дороги представляют собой область, для которой не подготовлена трехмерная высокоточная картографическая информация. В этом случае, когда рассматриваемое транспортное средство V движется из состояния движения по главной дороге 21 к выездной дороге 22, условие отмены, заключающееся в том, что «маркеры полосы движения с обеих сторон рассматриваемого транспортного средства больше не обнаруживаются» в вышеописанном условия (4) и (6) удовлетворяются, поэтому автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем.
[0044]
Можно сказать, что такая первая сцена движения для движения изнутри области, подверженной автономному управлению рулевым управлением, за пределы области представляет собой сцену движения, в которой желательно перейти от автономного управления рулевым управлением к ручному управлению водителем, как только возможный. Как показано на фиг. 5, поэтому первый порог отмены, меньший, чем стандартный порог отмены, установлен для первой сцены движения, такой как выезд или выезд с проезжей части проиллюстрированной автомобильной дороги. Посредством этой установки водитель может просто приложить небольшой крутящий момент рулевого управления к рулевому колесу, чтобы отменить автономное управление рулевым управлением и перейти к ручному управлению. ФИГ. 5 представляет собой схему, иллюстрирующую пороговое значение отмены для каждой сцены движения относительно крутящего момента рулевого управления, сохраненного в устройстве 18 управления. Стандартный порог отмены относится к минимальному значению крутящего момента рулевого колеса, управляемого водителем, и это значение требуется для отмены автономного управления рулевым управлением и перехода к ручному управлению водителем. Таким образом, когда крутящий момент рулевого колеса, управляемого водителем, превышает, по меньшей мере, стандартный порог отмены, автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем.
[0045]
ФИГ. 4B - вид сверху, иллюстрирующий автомобильную дорогу, включающую в себя криволинейный маршрут, и рассматриваемое транспортное средство V собирается повернуть направо по криволинейному маршруту 23. По сравнению со случаем, когда стандартный порог отмены используется для движения по прямому маршруту, при повороте криволинейного маршрута 23 водитель может захотеть управлять транспортным средством со своим собственным ощущением от вождения, и поэтому можно сказать, что такое сцена - это сцена движения, в которой желательно как можно скорее перейти от автономного управления рулевым управлением к ручному управлению водителем. Как показано на фиг. 5, поэтому второй порог отмены, меньший, чем стандартный порог отмены, установлен для второй сцены движения по криволинейному маршруту 23. Однако обратите внимание, что если ошибка в крутящем моменте рулевого управления (разница между выходным значением от устройства 17 управления вождением и фактическим значением крутящего момента рулевого управления) обнаруживается из-за автономного управления рулевым управлением, произойдет непреднамеренная отмена, поэтому второй порог отмены установлено значение, превышающее первое пороговое значение отмены.
[0046]
Кроме того, как показано на фиг. 4B, в случае S2, в котором, когда рассматриваемое транспортное средство V должно повернуть направо по криволинейному маршруту 23, направление поворота рассматриваемого транспортного средства V и направление поворота рулевого колеса являются противоположными направлениями, водитель может не удерживать рулевое колесо, поэтому считается, что лучше продолжить автономное рулевое управление. То есть третий порог отмены в случае S2, в котором направление поворота рассматриваемого транспортного средства V и направление поворота рулевого колеса являются противоположными направлениями, устанавливается как относительно большее значение, чем второе пороговое значение отмены в случае S1 в котором направление поворота рассматриваемого транспортного средства V и направление поворота рулевого колеса являются идентичными.
[0047]
Затем будет описан процесс управления движением согласно настоящему варианту осуществления со ссылкой на фиг. 6A и 6B. Фиг. 6A и 6B - блок-схемы, иллюстрирующие процесс управления движением согласно настоящему варианту осуществления. Устройство 18 управления выполняет процесс управления движением, который будет описан ниже, с заранее определенными интервалами времени. Следующее описание будет сделано в предположении, что устройство 18 управления использует функцию автономного управления движением для выполнения автономного управления скоростью и автономного управления рулевым управлением, и рассматриваемое транспортное средство движется рядом с выездом с автомобильной дороги или по криволинейному маршруту, в то время как управление удержанием полосы движения для управления положением при движении рассматриваемого транспортного средства в направлении ширины выполняется таким образом, что рассматриваемое транспортное средство движется по полосе движения со скоростью, которая устанавливается водителем.
[0048]
Сначала на этапе S1 по фиг. 6A, выполняется определение того, включен ли главный переключатель 161 устройства 18 управления, и когда главный переключатель 161 выключен, этап S1 повторяется до тех пор, пока главный переключатель 161 не будет включен. Когда главный переключатель 161 включен, процесс переходит к этапу S2, на котором определяется, установлена ли скорость движения водителем. Если скорость движения не установлена, процесс возвращается к этапу S1, с которого этапы S1 и S2 повторяются до тех пор, пока скорость движения не будет установлена. Установка скорости движения выполняется водителем, приводящим в действие переключатель 162 возобновления/ускорения или переключатель 163 установки/движения накатом устройства 16 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения.
[0049]
Когда скорость движения установлена, запускается автономное управление скоростью. На этапе S3 передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения, и когда есть предшествующее транспортное средство. транспортного средства, процесс переходит к этапу S4, на котором выполняется управление расстоянием между транспортными средствами, в то время как, когда нет предшествующего транспортного средства, процесс переходит к этапу S5, на котором выполняется управление с постоянной скоростью. Это позволяет водителю вести рассматриваемое транспортное средство с желаемой скоростью, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0050]
Во время выполнения управления расстоянием между транспортными средствами на этапе S4 или управления с постоянной скоростью на этапе S5, на этапе S6 выполняется определение того, выполняется ли вышеописанное условие (1) для перехода в режим удержания полосы движения автономное рулевое управление/ручной режим устраивает. Когда условие (1) удовлетворяется, процесс переходит к этапу S7, а когда условие (1) не удовлетворяется, процесс возвращается к этапу S1.
[0051]
На этапе S7 передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения, и когда есть предшествующее транспортное средство, процесс переходит к этапу S8, на котором выполняется режим управления расстоянием между транспортными средствами/удержания полосы движения, в то время как при отсутствии предшествующего транспортного средства процесс переходит к этапу S9, на котором выполняется режим управления с постоянной скоростью/удержания полосы движения. В этом состоянии выполняется процесс выполнения для функции помощи при смене полосы движения и/или функции помощи при обгоне этапа S10.
[0052]
Во время выполнения режима управления расстоянием между транспортными средствами/удержания полосы движения на этапе S8 или режима управления с постоянной скоростью/удержания полосы движения на этапе S9 определение выполняется на последующем этапе S11 на фиг. 6В относительно того, удовлетворяется ли вышеописанное условие (2) для перехода в режим автономного рулевого управления/режима без участия водителя. Когда условие (2) удовлетворяется, процесс переходит к этапу S12, а когда условие (2) не удовлетворяется, процесс переходит к этапу S15. На этапе S12, на котором выполняется условие (2) перехода в режим автономного рулевого управления/режима без участия водителя, передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, действительно ли впереди рассматриваемого транспортного средства на его полосе движения находится предшествующее транспортное средства. Когда есть предшествующее транспортное средство, процесс переходит к этапу S13, на котором выполняется управление расстоянием между транспортными средствами/режим удержания полосы движения/режим без участия водителя, в то время как, когда предшествующего транспортного средства нет, процесс переходит к этапу S14, на котором выполняется управление с постоянной скоростью/режим удержания полосы движения/режим без участия водителя.
[0053]
На этапе S15 сцена движения, такая как съезд, выезд с дороги или криволинейный маршрут автомобильной дороги, существующей впереди рассматриваемого транспортного средства на его маршруте, обнаруживается в картографической базе данных 13, извлекается порог отмены, соответствующий обнаруженной сцене движения, и устанавливается значение порога отмены. Например, когда перед рассматриваемым транспортным средством есть выезд или выезд на автомобильную дорогу, порог отмены устанавливается равным первому пороговому значению отмены. Когда есть криволинейный маршрут и направление поворота рассматриваемого транспортного средства и направление поворота рулевого колеса совпадают, порог отмены устанавливается равным второму пороговому значению отмены, в то время как при наличии криволинейного маршрута и направления поворота, рассматриваемое транспортное средство и направление поворота рулевого колеса являются противоположными направлениями, порог отмены устанавливается равным третьему пороговому значению отмены.
[0054]
На этапе S16 определяется, превышает ли крутящий момент рулевого управления, обнаруженный датчиком крутящего момента, установленный порог отмены, и когда крутящий момент рулевого управления превышает установленный порог отмены, процесс переходит к этапу S23, на котором автономное управление рулевым управлением отменяется, а затем процесс возвращается к этапу S1. Когда крутящий момент рулевого управления не превышает установленный порог отмены, процесс переходит к этапу S17. Затем, на этапе S17, передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для обнаружения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения. Когда есть предшествующее транспортное средство, процесс переходит к этапу S18, на котором выполняется управление расстоянием между транспортными средствами/режим удержания полосы движения/управление скоростью на криволинейном маршруте, в то время как, когда предшествующего транспортного средства нет, процесс переходит к этапу S19, в при котором выполняется управление с постоянной скоростью/режим удержания полосы движения/управление скоростью на криволинейном маршруте. Благодаря этой операции, при попытке двигаться по крутой кривой на высокой скорости, можно двигаться со скоростью, соответствующей размеру криволинейного маршрута, даже если установка функции управления скоростью криволинейного маршрута выключена.
[0055]
На этапе S20 передний радар (из числа датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для обнаружения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения. Когда есть предшествующее транспортное средство, процесс переходит к этапу S21, на котором выполняется определение, как на этапе S6, относительно того, выполнено ли условие (1) для перехода в режим удержания полосы движения автономного рулевого управления/ручного управления. режим удовлетворяется, и когда выполняется условие (1), процесс переходит к этапу S22. На этапе S22, как и на этапе S11, выполняется определение того, удовлетворяется ли условие (2) для перехода в режим автономного рулевого управления/режим без участия водителя, и когда условие (2) удовлетворяется, процесс возвращается к этапу S12, с которого продолжаются последующие процессы. С другой стороны, когда нет предшествующего транспортного средства и ни условие (1), ни (2) не удовлетворяются, процесс возвращается к этапу S1, с которого продолжаются последующие процессы.
[0056]
Как описано выше, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления устанавливается множество пороговых значений отмены, соответствующих соответствующим сценам движения. То есть порог отмены устанавливается на относительно небольшое значение в случае сцены движения, в которой желателен переход от автономного управления рулевым управлением к ручному управлению водителем, в то время как порог отмены устанавливается на относительно большое значение в случае сцены движения, в которой переход нежелателен, и поэтому можно ответить на запрос перехода от автономного управления рулевым управлением к ручному управлению в соответствии со сценой движения транспортного средства.
[0057]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, первая сцена движения для движения изнутри области, подверженной автономному управлению рулевым управлением, за пределы области, первый порог отмены меньше стандартного установлен порог отмены, и поэтому можно отреагировать на сцену движения, в которой желательно как можно скорее перейти от автономного управления рулевым управлением к ручному управлению водителем.
[0058]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, сцена движения включает в себя вторую сцену движения по криволинейному маршруту, и второй порог отмены, меньший, чем стандартный порог отмены, установлен для второй сцены движения; следовательно, можно отреагировать на сцену движения, в которой желательно как можно скорее перейти от автономного управления рулевым управлением к ручному управлению водителем. Однако обратите внимание, что если ошибка в крутящем моменте рулевого управления (разница между выходным значением от устройства 17 управления вождением и фактическим значением крутящего момента рулевого управления) обнаруживается из-за автономного управления рулевым управлением, произойдет непреднамеренная отмена, поэтому второй порог отмены установлен на значение, превышающее первое пороговое значение отмены.
[0059]
Кроме того, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, во второй сцене движения по криволинейному маршруту порог отмены в случае сцены движения, в которой направление поворота транспортного средства и направление поворота рулевого колеса, управляемого водителем, являются противоположными направлениями, устанавливается как большее значение, чем в случае сцены движения, в которой направление поворота транспортного средства и направление поворота рулевого колеса, управляемое водителем в том-же направлении. С помощью этой установки можно ответить на запрос о том, что водитель хочет управлять транспортным средством, со своим собственным ощущением от вождения и в ситуации, когда водитель не держит рулевое колесо.
[Описание позиционных обозначений]
[0060060]
1 Устройство управления движением
11 Датчики
12 Устройство определения местоположения рассматриваемого транспортного средства
13 Картографическая база данных
14 Бортовое оборудование
15 Устройство представления
16 Устройство ввода
161 Главный переключатель
162 Переключатель возобновления/ускорения
163 Переключатель установки/движения накатом
164 Переключатель отмены
165 Переключатель управления расстоянием между транспортными средствами
166 Переключатель помощи при смене полосы движения
17 Устройство управления вождением
18 Устройство управления
Изобретение относится к способу управления движением. Способ управления движением транспортного средства содержит установку множества пороговых значений отмены, соответствующих соответствующим сценам движения, причем пороговые значения отмены используются для отмены автономного управления рулевым управлением и перехода к ручному управлению водителем, обнаружение сцены движения транспортного средства во время выполнения автономного рулевого управления, извлечение порога отмены, соответствующего обнаруженной сцене движения, из множества установленных пороговых значений отмены и определение на основе извлеченного порога отмены, отменять ли автономное управление рулевым управлением и переходить к ручному управлению водителем. Автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем, когда крутящий момент рулевого колеса, управляемого водителем, превышает стандартный порог отмены, сцена движения включает в себя первую сцену движения из области, находящейся под автономным управлением рулевым управлением, за пределы области и первый порог отмены, меньший, чем стандартный порог отмены, устанавливается для первой сцены движения. Достигается своевременный переход от автономного управления рулевым управлением к ручному управлению в соответствии со сценой движения транспортного средства. 3 н. и 3 з.п. ф-лы, 8 ил.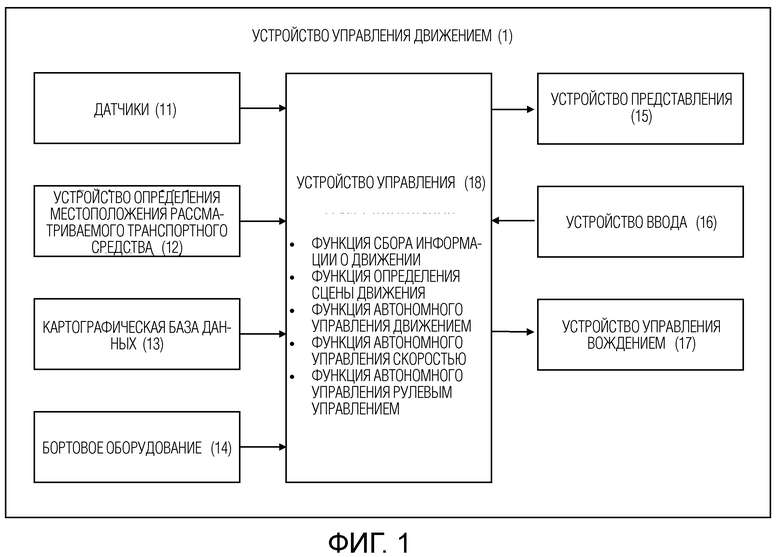
1. Способ управления движением транспортного средства, включая автономное управление рулевым управлением для автономного управления рулевым управлением транспортного средства, причем способ управления движением содержит:
установку множества пороговых значений отмены, соответствующих соответствующим сценам движения, причем пороговые значения отмены используются для отмены автономного управления рулевым управлением и перехода к ручному управлению водителем;
обнаружение сцены движения транспортного средства во время выполнения автономного рулевого управления;
извлечение порога отмены, соответствующего обнаруженной сцене движения, из множества установленных пороговых значений отмены и
определение на основе извлеченного порога отмены, отменять ли автономное управление рулевым управлением и переходить к ручному управлению водителем, в котором
в случае, когда автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем, когда крутящий момент рулевого колеса, управляемого водителем, превышает стандартный порог отмены,
сцена движения включает в себя первую сцену движения из области, находящейся под автономным управлением рулевым управлением, за пределы области, и
первый порог отмены, меньший, чем стандартный порог отмены, устанавливается для первой сцены движения.
2. Способ управления движением транспортного средства, включая автономное управление рулевым управлением для автономного управления рулевым управлением транспортного средства, причем способ управления движением содержит:
установку множества пороговых значений отмены, соответствующих соответствующим сценам движения, причем пороговые значения отмены используются для отмены автономного управления рулевым управлением и перехода к ручному управлению водителем;
обнаружение сцены движения транспортного средства во время выполнения автономного рулевого управления;
извлечение порога отмены, соответствующего обнаруженной сцене движения, из множества установленных пороговых значений отмены и
определение, на основе извлеченного порога отмены, отменять ли автономное управление рулевым управлением и переходить к ручному управлению водителем, в котором
в случае, когда автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем, когда крутящий момент рулевого колеса, управляемого водителем, превышает стандартный порог отмены,
сцена движения включает в себя вторую сцену движения по криволинейному маршруту, и
второй порог отмены, меньший, чем стандартный порог отмены, устанавливается для второй сцены движения.
3. Способ управления движением для транспортного средства по п. 1, в котором
сцена движения включает в себя вторую сцену движения по криволинейному маршруту, и
второй порог отмены, меньший, чем стандартный порог отмены, и больший, чем первый порог отмены, устанавливается для второй сцены движения.
4. Способ управления движением транспортного средства по п. 1, отличающийся тем, что
сцена движения включает в себя вторую сцену движения по криволинейному маршруту, и
во второй сцене движения порог отмены в случае сцены движения, в которой направление поворота транспортного средства и направление поворота рулевого колеса, управляемого водителем, являются противоположными направлениями, устанавливается как большее значение, чем в случае сцены движения, в которой направление поворота транспортного средства и направление поворота рулевого колеса, которым управляет водитель, являются идентичными направлениями.
5. Способ управления движением для транспортного средства по любому из пп. 1-4, в котором сцена движения обнаруживается из данных карты, которые предварительно сохранены.
6. Устройство управления движением для транспортного средства, включая автономное управление рулевым управлением для автономного управления рулевым управлением транспортного средства, причем устройство управления движением сконфигурировано так, чтобы, когда крутящий момент рулевого колеса, управляемого водителем, превышает пороговое значение отмены, отменять автономное управление рулевым управлением и переходить к ручному управлению водителем, при этом устройство управления движением работает для того, чтобы:
устанавливать множество пороговых значений отмены, соответствующих соответствующим сценам движения;
обнаруживать сцену движения транспортного средства во время выполнения автономного рулевого управления;
извлекать порог отмены, соответствующий обнаруженной сцене движения, из множества установленных пороговых значений отмены и
определять на основе извлеченного порога отмены, отменять ли автономное управление рулевым управлением и переходить к ручному управлению водителем,
в котором
в случае, когда автономное управление рулевым управлением отменяется и переходит к ручному управлению водителем, когда крутящий момент рулевого колеса, управляемого водителем, превышает стандартный порог отмены,
сцена движения включает в себя первую сцену движения из области, находящейся под автономным управлением рулевым управлением, за пределы области, и
первый порог отмены, меньший, чем стандартный порог отмены, устанавливается для первой сцены движения.
| JP 2016159781 A, 05.09.202016 | |||
| JP 6410655 B2, 17.11.2016 | |||
| US 8825258 B2, 02.09.2014 | |||
| CN 104680840 B, 14.05.2019 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643896C2 |

