УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к электрически управляемой гидравлической системе для трансмиссии транспортного средства.
Настоящее изобретение также относится к способу электрического управления гидравлической системой для трансмиссии транспортного средства.
Трансмиссия транспортного средства для сцепления и передачи мощности двигателя на колеса транспортного средства может содержать множество элементов трансмиссии, например элементов сцепления и элементов управления крутящим моментом, которые необходимо приводить в действие управляемым образом в пределах непрерывного диапазона срабатывания. Другим примером элемента трансмиссии является фрикционный элемент, служащий для зажима гибкого элемента, такого как цепь или ремень, в системе бесступенчатой трансмиссии. В электрически управляемой гидравлической системе для трансмиссии транспортного средства элементы трансмиссии приводят в действие посредством гидравлического давления, управляемого посредством электрически управляемых модулей управления гидравлическим давлением, содержащих элемент в виде гидравлического клапана и электромагнитно управляемый рабочий элемент, такой как соленоид, для обеспечения работы элемента гидравлического клапана. На практике управляемое непрерывное срабатывание может быть затруднено вследствие трения, возникающего в указанных элементах. В частности, затруднено обеспечение небольших изменений срабатываний, поскольку изменение гидравлического усилия, необходимого для обеспечения небольшого изменения, может быть недостаточным для преодоления статического трения в модуле управления давлением. Выход за установленные пределы легко возникает, как только значение электромагнитной силы становится достаточно большим для преодоления статического трения.
Известный способ решения указанной проблемы заключается в добавлении низкочастотной составляющей, также называемой возмущающим сигналом, или сигналом подмешиваемых вибраций, вызывающей колебание модуля управления давлением в соответствии с частотой возмущающей составляющей, что приводит к ослаблению проявления статического трения в модуле управления давлением.
Примером электронного контроллера, имеющего гистерезисный режим привода, обеспечивающий возмущающий сигнал, является MC33816: программируемый драйвер SD6 для управления соленоидом, поставляемый компанией NXP.
Контроллер выполнен с возможностью независимого управления соответствующей одной парой переключающих элементов, размещенных в мостовой схеме, управляющей нагрузкой. В первом рабочем режиме оба переключающих элемента являются проводящими для управления нагрузкой от клемм источника питания Vboost и заземления. Во втором рабочем режиме только первый из переключающих элементов является проводящим, в результате чего возникает ток свободного хода, проходящий через первый проводящий переключающий элемент и диод свободного хода, прикрепленный к той же клемме источника питания, что и первый проводящий переключающий элемент. В третьем рабочем режиме только второй из переключающих элементов является проводящим, в результате чего возникает ток свободного хода, проходящий через второй проводящий переключающий элемент и диод свободного хода, прикрепленный к той же клемме источника питания, что и второй проводящий переключающий элемент.
Последовательно с клеммой заземления обеспечен сенсорный резистор.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение электрически управляемой гидравлической системы для трансмиссии транспортного средства, позволяющей более точно управлять срабатыванием элемента трансмиссии в трансмиссии транспортного средства.
Еще одной задачей является обеспечение более точного способа электрического управления срабатыванием элемента трансмиссии в трансмиссии транспортного средства.
В соответствии с указанной задачей предложена усовершенствованная электрически управляемая гидравлическая система для трансмиссии транспортного средства, заявленная в п. 1 формулы изобретения. Усовершенствованная электрически управляемая гидравлическая система содержит систему нагнетательного насоса и подсистему, содержащую элемент трансмиссии и электрически управляемый модуль управления гидравлическим давлением, содержащий элемент в виде гидравлического клапана для управления гидравлическим давлением, подаваемым на указанный по меньшей мере один элемент трансмиссии для приведения в действие указанного элемента трансмиссии в диапазоне срабатывания и электромагнитно управляемый рабочий элемент для обеспечения работы элемента гидравлического клапана. При этом подсистема имеет первую частоту среза, а электрически управляемый модуль управления гидравлическим давлением имеет вторую частоту (f2) среза, превышающую указанную первую частоту (f1) среза.
Усовершенствованная электрически управляемая гидравлическая система также содержит схему драйвера для обеспечения сигнала привода для обеспечения управляемого привода электромагнитно управляемого клапана. При этом схема драйвера содержит мостовую схему, имеющую первую ветвь питания и вторую ветвь питания, обеспеченные между первой клеммой источника питания и второй клеммой источника питания. При этом первая клемма источника питания и вторая клемма источника питания задают полярность источника питания. Первая ветвь питания содержит первый управляемо проводящий канал первого переключающего элемента между первой клеммой источника питания и первым узлом соединения и первый однонаправленный проводящий элемент, размещенный между первым узлом соединения и второй клеммой источника питания. Вторая ветвь питания содержит второй управляемо проводящий канал второго однонаправленного проводящего элемента между первой клеммой источника питания и вторым узлом соединения и второй переключающий элемент между вторым узлом соединения и второй клеммой источника питания. Каждый из первого и второго однонаправленных проводящих элементов размещен со своим непроводящим направлением относительно полярности источника питания, а электромагнитно управляемый рабочий элемент обеспечен в виде нагрузки между указанным первым и указанным вторым узлами соединения для приема сигнала привода.
Схемой драйвера управляет схема управления, содержащая вход для приема входного сигнала, указывающего на требуемое значение тока, подаваемого на электрически управляемый модуль управления гидравлическим давлением, и для соответствующего обеспечения управляющего сигнала, например, управляющего сигнала с широтно-импульсной модуляцией, для одновременного управления первым и вторым переключающими элементами в первом режиме, в котором оба переключающих элемента являются проводящими, и во втором режиме, в котором оба переключающих элемента являются непроводящими.
Таким образом, обеспечено резкое падение тока, проходящего через электромагнитно управляемый рабочий элемент электрически управляемого модуля управления гидравлическим давлением. При этом для уменьшения статического трения доступен существенно более широкий диапазон настройки частоты и амплитуды возмущающего сигнала, что приводит к более стабильному и точному реагированию, или чувствительности, на изменение давления соленоидного клапана. При этом управляющий сигнал имеет частоту и рабочий цикл, соответствующий возмущенному входному значению, представляющему собой входное значение указанного входного сигнала, модифицированное значением возмущения, причем значение возмущения варьируется в соответствии с периодической функцией с частотой возмущения в диапазоне, определенном указанной первой частотой (f1) и указанной второй частотой (f2). Предпочтительно частота возмущения находится в диапазоне, определяемом указанной первой частотой (f1) и указанной второй частотой (f2), причем частота возмущения значительно ниже второй частоты. Однако настоящее изобретение также применимо в случае, если частота возмущения существенно не превышает вторую частоту, например, если частота возмущения имеет значение, по существу равное второй частоте, или если частота возмущения имеет незначительно более высокое значение, в результате чего чувствительность не ниже 5 дБ от номинальной чувствительности.
В соответствии с указанной дополнительной задачей предложен соответствующий усовершенствованный способ управления гидравлической системой для трансмиссии транспортного средства, заявленный в п. 7 формулы изобретения.
В одном варианте реализации электрически управляемая гидравлическая система также содержит сенсорный элемент для обеспечения сенсорного сигнала, указывающего на фактическое значение срабатывания электрически управляемого модуля управления гидравлическим давлением, причем схема управления также выполнена с возможностью обеспечения управляющего сигнала в соответствии с отклонением между фактическим значением указанного срабатывания, указываемым сенсорным сигналом, и требуемым значением указанного срабатывания, указываемым указанным возмущенным входным значением. В одном варианте реализации данного варианта реализации сенсорный элемент представляет собой элемент датчика тока, размещенный между первым и вторым узлами соединения последовательно с электромагнитно управляемым рабочим элементом электрически управляемого модуля управления гидравлическим давлением. При этом получают высокоточный сигнал обратной связи для дальнейшего улучшения реагированию на изменение давления электрически управляемого модуля управления гидравлическим давлением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные и другие аспекты более подробно описаны со ссылкой на чертежи. На чертежах:
На ФИГ. 1 показан вариант реализации электрически управляемой гидравлической системы в соответствии с настоящим изобретением,
На ФИГ. 2 более подробно показана часть электрически управляемой гидравлической системы,
На ФИГ. 3 более подробно показан драйвер, используемый в данном варианте реализации,
На ФИГ. 4А-4D показана работа электрически управляемой гидравлической системы, известной из уровня техники,
На ФИГ. 5A-5C показана работа электрически управляемой гидравлической системы по варианту реализации по ФИГ. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Сходные элементы на различных чертежах обозначены сходными позициями, если не указано обратное.
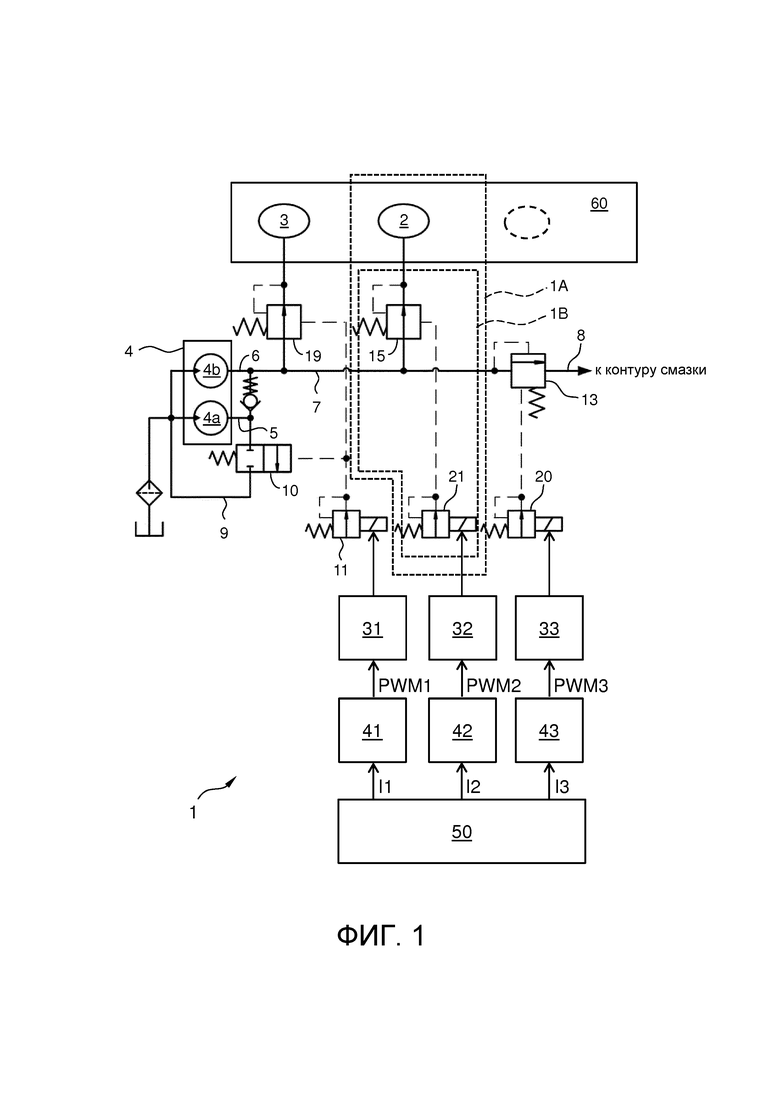
На ФИГ. 1 схематично показана электрически управляемая гидравлическая система 1 для трансмиссии 60 транспортного средства для сцепления и передачи мощности двигателя на колеса транспортного средства путем приведения в действие по меньшей мере одного элемента 2 трансмиссии транспортного средства посредством гидравлической системы. Обычно трансмиссия обеспечивает управляемое приложение мощности двигателя путем преобразования скорости и крутящего момента от источника энергии, такого как, например, двигатель внутреннего сгорания или электрическая машина . Гидравлическая система может обеспечивать приведение в действие фрикционных элементов в трансмиссии транспортного средства для сцепления входа трансмиссии с зубчатой передачей с целью передачи мощности двигателя на колеса транспортного средства. Подобная трансмиссия, например бесступенчатая трансмиссия CVT, может содержать фрикционные элементы. Фрикционные элементы могут быть реализованы в виде шкивов, между которыми посредством силы трения в бесступенчатой трансмиссии может быть зажат гибкий элемент, такой как цепь или ремень. В другом варианте трансмиссия 60 транспортного средства может обеспечивать регулируемое ступенчатым образом передаточное число. Как показано на ФИГ. 1, трансмиссия 60 транспортного средства содержит по меньшей мере один элемент 2 трансмиссии, например фрикционный элемент, и может содержать один или более других элементов трансмиссии, например, муфту 3 сцепления.
В проиллюстрированном варианте реализации управляемая гидравлическая система 1 содержит систему 4а, 4b нагнетательного насоса, электрически управляемый модуль 1В управления гидравлическим давлением, содержащий гидравлический элемент 15 срабатывания и электромагнитно управляемый рабочий элемент 21 для обеспечения работы гидравлического элемента 15 срабатывания. Управляемая гидравлическая система 1 также содержит схему 32 драйвера и схему 42 управления.
В данном варианте реализации гидравлическая система 1 содержит систему 4 нагнетательного насоса, имеющую две отводящие линии 5, 6. Система 4 нагнетательного насоса может быть выполнена в виде насоса, содержащего две насосные камеры, или в виде двух насосов, каждый из которых содержит насосную камеру, и т. д. Возможно множество вариаций. В данном случае система 4 нагнетательного насоса схематически представлена двумя насосами 4а, 4b, имеющими отводящие линии 5 и 6, соответственно.
Система 4 насоса может приводиться в действие двигателем, который также служит для подачи энергии на колеса транспортного средства и создает давление в гидравлической жидкости гидравлической системы 1. Жидкость под давлением подают в гидравлическую систему 1. Гидравлическая система 1 обычно представляет собой двойную систему, содержащую контур 7 линейного давления, в котором жидкость находится под относительно высоким давлением (примерно 5-80 бар, предпочтительно 7-70 бар) и контур 8 смазки с более низким давлением (примерно 5-10 бар, предпочтительно 6-9 бар). Контур 8 смазки в основном предназначен для охлаждения и смазки компонентов трансмиссии и ниже дополнительно не описан. Следует отметить, что диапазон высокого давления и диапазон низкого давления перекрывают друг друга, но также следует отметить, что высокое давление в любой момент времени выше, чем низкое давление, и в ходе использования не возникает перекрытий значений давления.
В контуре 7 линейного давления рабочие элементы или соленоиды обеспечивают работу клапанов в контуре линейного давления с целью управления давлением на компоненты трансмиссии, такие как элементы 2, 3 трансмиссии или муфта сцепления, или давлением в самом контуре линейного давления и т.д.
В показанном варианте реализации система 4 нагнетательного насоса имеет две отводящие линии 5, 6, связанные с контуром 7 линейного давления. Система 4 нагнетательного насоса также снабжена обводным контуром 9, управляемым посредством обводного клапана 10. Когда обводной контур 9 открыт с открытым обводным клапаном 10, через обводной контур идет поток, а выходной поток системы 4 давления уменьшен. При этом падает давление в одной из отводящих линий, в данном случае в отводящей линии 5. Когда обводной контур 9 закрыт, обводной клапан 10 также закрыт, и выходной поток одной из отводящих линий, в данном случае отводящей линии 5, подают в контур 7 линейного давления. Указанный принцип также называют функцией "форсирования", поскольку выходной поток системы 4 насоса затем быстро (практически немедленно) увеличивается. Обводным клапаном 10 управляют посредством обводного рабочего элемента 11. Благодаря наличию обходного контура 9 давление и выходной поток второго насоса или насосной камеры 4а всегда доступны, но не всегда подаются в контур 7 линейного давления. Таким образом, при отсутствии необходимости в дополнительном потоке насоса (без форсирования), двигатель потребляет меньше энергии.
В контуре 7 линейного давления выполнены различные клапаны для управления давлением на компоненты трансмиссии и/или гидравлической системы. Обеспечен не показанный на чертеже соленоидный подающий клапан, управляющий давлением на рабочих элементах или соленоидах. Обеспечен клапан 13 линейного давления, управляющий давлением в контуре 7 линейного давления. Выход клапана 13 линейного давления переходит в контур 8 смазки посредством смазочного клапана. Выход смазочного клапана обычно переходит обратно в систему 4 насоса.
Также обеспечен элемент 15 в виде гидравлического клапана для управления давлением на элемент 2 трансмиссии. Например, элемент 15 в виде гидравлического клапана может обеспечивать дополнительный поток жидкости к не показанному на чертеже избирательному клапану, управляющему муфтой переднего хода и муфтой заднего хода. Кроме того, в контуре 7 линейного давления выполнен элемент 19 гидравлического клапана, управляющий другим элементом 3 трансмиссии. В одном варианте реализации, не показанном на ФИГ. 1, контур 7 линейного давления также содержит клапан муфты сцепления и клапан управления крутящим моментом, не показанные на чертеже.
Посредством управления давлением на элемент 2 трансмиссии элемент 15 в виде гидравлического клапана приводит в действие элемент 2 трансмиссии в диапазоне срабатывания.
Электрически управляемый модуль 1B управления гидравлическим давлением задан элементом 15 в виде гидравлического клапана и электромагнитно управляемым рабочим элементом 21, таким как соленоид, обеспечивающий работу элемента 15 в виде гидравлического клапана. Аналогично, в показанном варианте реализации обеспечены другие электромагнитно управляемые рабочие элементы 11 и 20 для управления другими элементами 10, 19 и 13 в виде клапанов.
Электрически управляемый модуль 1B управления гидравлическим давлением и элемент 2 трансмиссии образуют подсистему 1A с первой частотой (f1) среза, и электрически управляемый модуль 1B управления гидравлическим давлением имеет вторую частоту (f2) среза, превышающую первую частоту (f1) среза. Частота среза, также называемая частотой отсечки, в настоящем описании определена как частота, при которой чувствительность элемента или подсистемы снижена до -3 дБ относительно номинальной чувствительности.
Как показано на ФИГ. 1, электромагнитно управляемый рабочий элемент 21 электрически управляемого модуля 1B управления гидравлическим давлением приводится в действие схемой 32 драйвера, управляемой посредством ШИМ-сигнала от схемы 42 управления. Сходным образом, обеспечены соответствующая схема 41, 43 управления и схема 31, 33 драйвера для электромагнитно управляемых рабочих элементов 11 и 20 других электрически управляемых модулей управления гидравлическим давлением. Схемами 41, 42, 43 управления управляют посредством соответствующих входных сигналов I1, I2, I3 от основного блока 50 управления, указывающих на требуемое срабатывание соответствующего элемента трансмиссии 60 транспортного средства и/или элемента гидравлической системы. В дальнейшем сигнал I2, указывающий на требуемое срабатывание элемента 2 трансмиссии, также обозначен позицией Iset.
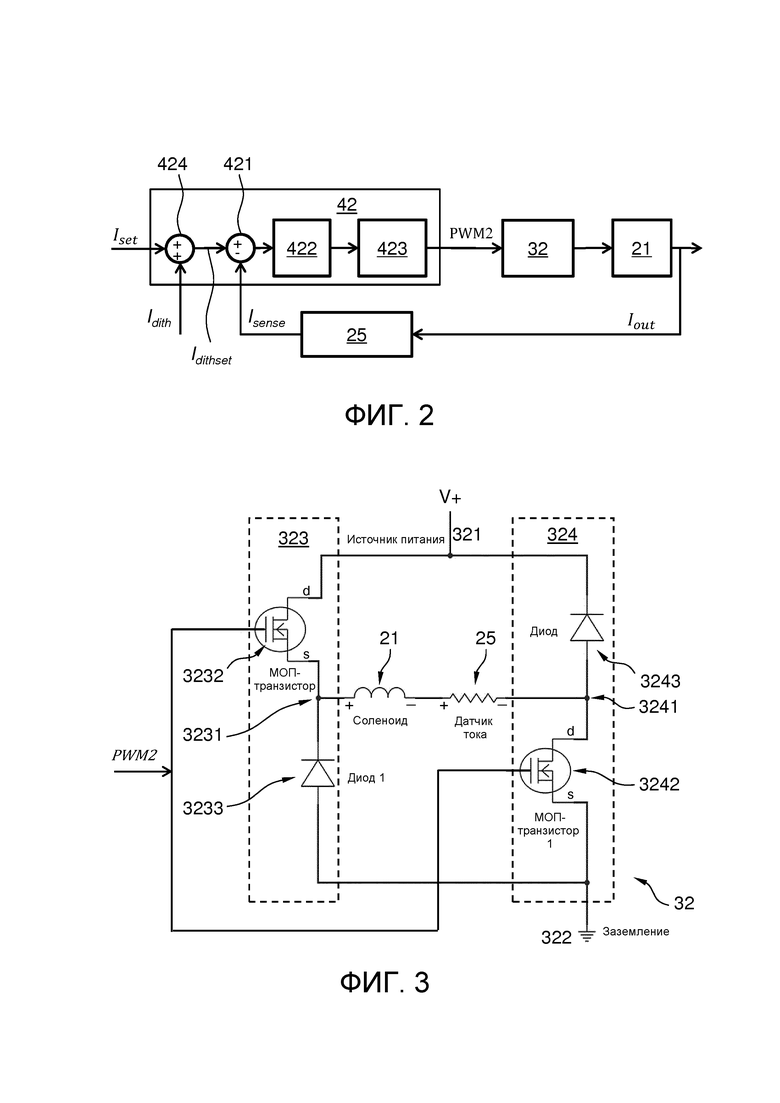
На ФИГ. 2 показана часть электрически управляемой гидравлической системы по ФИГ. 1, причем схема 42 управления показана более подробно. Схема, сходная с показанной на ФИГ. 2, может быть обеспечена и для других электромагнитно управляемых рабочих элементов, например, электромагнитно управляемых рабочих элементов 11 и 20.
Как показано на ФИГ. 2, схема 42 управления имеет вход для приема входного сигнала Iset, указывающего на требуемое значение срабатывания элемента 2 трансмиссии. Схема 42 управления содержит элемент 424 модуляции, например, сумматор, модифицирующий входное значение входного сигнала Iset с помощью значения возмущения (обозначенного позицией Idith) с целью формирования возмущенного входного сигнала Idithset. Значение возмущения варьируется в соответствии с периодической функцией с частотой возмущения (fdith) в диапазоне, определяемом первой частотой f1 среза и второй частотой f2 среза. Предпочтительно диапазон для частоты возмущения (fdith) задан таким образом, что частота возмущения (fdith) выше, чем первая частота f1 среза, и ниже, чем вторая частота f2 среза. Однако могут быть предусмотрены варианты реализации, в которых частота возмущения (fdith) равна второй частоте f2 среза или даже незначительно выше второй частоты f2 среза при условии, что вклад составляющей возмущения в сигнал привода по-прежнему обладает способностью вызывать колебание электрически управляемого модуля 1В управления гидравлическим давлением.
Схема 42 управления выполнена с возможностью обеспечения управляющего сигнала PWM2, например, управляющего сигнала с широтно-импульсной модуляцией, для управления схемой 32 драйвера в соответствии с возмущенным входным сигналом Idithset с целью обеспечения схемой 32 драйвера работы элемента 15 в виде гидравлического клапана посредством электромагнитно управляемого рабочего элемента 21 со срабатыванием, указанном в возмущенном входном сигнале. Другими словами, схема управления выводит управляющий сигнал PWM2 в виде периодического сигнала с частотой fPWM и имеет рабочий цикл, соответствующий мгновенному значению возмущенного входного сигнала.
Сигнал Idith возмущения, добавленный ко входному сигналу Iset, вводит периодическое изменение относительно требуемого значения срабатывания элемента 2 трансмиссии, указанного во входном сигнале Iset. Обычно ШИМ-частота fPWM выше, чем первая и вторая частоты среза. Частота возмущения вносит периодическое изменение в срабатывание электромагнитно управляемого рабочего элемента 21 и связанного с ним элемента 15 в виде гидравлического клапана с соответствующим уменьшением эффекта статического трения. Поскольку частота возмущения (а также ШИМ-частота) выше, чем первая частота среза, указанные периодические изменения не приводят к возмущающим вибрациям элемента трансмиссии. Например, ШИМ-частота (fPWM) может быть в от 10 до 1000 раз выше, чем частота возмущения. Например, ШИМ-частота может находиться в диапазоне от 500 до 10000 Гц, а частота возмущения может находиться в диапазоне от 10 до 500 Гц. Тем не менее, также может быть применимой и более высокая частота возмущения, например, до 10 кГц, при условии, что она значительно не превышает частоту среза электрически управляемого модуля управления гидравлическим давлением, содержащего элемент в виде гидравлического клапана и электромагнитно управляемый рабочий элемент.
В варианте реализации, показанном на ФИГ. 2, выполнен сенсорный элемент для обеспечения сенсорного сигнала Isense, указывающего на фактическое значение срабатывания элемента трансмиссии. Схема 42 управления содержит модуль 423 схемы выработки ШИМ для обеспечения управляющего сигнала PWM2 в соответствии с отклонением между фактическим значением срабатывания, указанным в сенсорном сигнале Isense, и требуемым значением срабатывания электрически управляемого модуля 1B управления гидравлическим давлением, указанным в возмущенном входном сигнале Idithset. Сенсорный элемент может непосредственно определять срабатывание элемента 15 в виде гидравлического клапана электрически управляемого модуля 1B управления гидравлическим давлением, например, посредством датчика положения. В одном варианте реализации, например, как показано на ФИГ. 3, сенсорный элемент 25 представляет собой элемент датчика тока, размещенный между первым и вторым узлами 3231, 3241 соединения последовательно с электромагнитно управляемым рабочим элементом электромагнитно управляемого рабочего элемента 1В.
Схема 42 управления может также быть выполнена с возможностью обеспечения управляющего сигнала PWM2 в соответствии с отклонением между указанным фактическим значением и требуемым значением, указанном в возмущенном входном сигнале Idithset, например, таким образом, что схема не только стремится к получению требуемого значения, но также стремится к уменьшению разности образом, зависящим от степени разности. В показанном варианте реализации схема 42 управления содержит элемент 421 вычитания для определения разностного сигнала, указывающего на отклонение, и схему 422 усиления для управления модулем 423 схемы выработки ШИМ. Схема 422 усиления представляет собой, например, схему ПИД-управления. Последняя, например, реализована в виде программного обеспечения в процессоре общего назначения или в специализированном сигнальном процессоре, или в виде специализированного аппаратного модуля.
Вариант реализации схемы 32 драйвера по ФИГ. 2 более подробно описан ниже со ссылкой на ФИГ. 3. Согласно чертежу, схема драйвера содержит мостовую схему, имеющую первую ветвь 323 питания и вторую ветвь 324 питания, обеспеченные между первой клеммой 321 источника питания и второй клеммой 322 источника питания. Первая клемма 321 источника питания и вторая клемма 322 источника питания задают полярность источника питания. В данном случае обеспечено напряжение V+, имеющее положительную полярность по отношению к напряжению заземления на клемме 322 источника питания.
Первая ветвь 323 питания содержит первый управляемо проводящий канал первого переключающего элемента 3232 между первой клеммой 321 источника питания и первым узлом 3231 соединения. Первая ветвь 323 питания также содержит первый однонаправленный проводящий элемент 3233, размещенный между первым узлом 3231 соединения и второй клеммой 322 источника питания. Вторая ветвь 324 питания содержит второй управляемо проводящий канал второго переключающего элемента 3242 между второй клеммой 322 источника питания и вторым узлом 3241 соединения. Вторая ветвь 324 питания также содержит второй однонаправленный проводящий элемент 3243 между вторым узлом 3241 соединения и первой клеммой 321 источника питания. Каждый из первого и второго однонаправленных проводящих элементов 3233, 3243 размещен со своим непроводящим направлением относительно полярности источника питания V+/заземление, а электромагнитно управляемый рабочий элемент 21 обеспечен в виде нагрузки между указанным первым и указанным вторым узлами 3231, 3241 соединения для приема сигнала привода.
Как показано на ФИГ. 3, первым и вторым переключающими элементами 3232, 3242 одновременно управляет управляющий сигнал PWM2.
В варианте реализации, показанном на ФИГ. 3, сенсорный элемент 25 представляет собой элемент датчика тока, размещенный последовательно с электромагнитно управляемым рабочим элементом 21 между первым и вторым узлами 3231, 3241 соединения. В другом варианте может быть обеспечен элемент датчика тока, индуктивным образом определяющий ток, проходящий через электромагнитно управляемый рабочий элемент 21. В другом варианте или дополнительно могут быть обеспечены сенсорные элементы, измеряющие срабатывание элемента 15 в виде гидравлического клапана электрически управляемого модуля 1B управления гидравлическим давлением и/или элемента 2 трансмиссии.
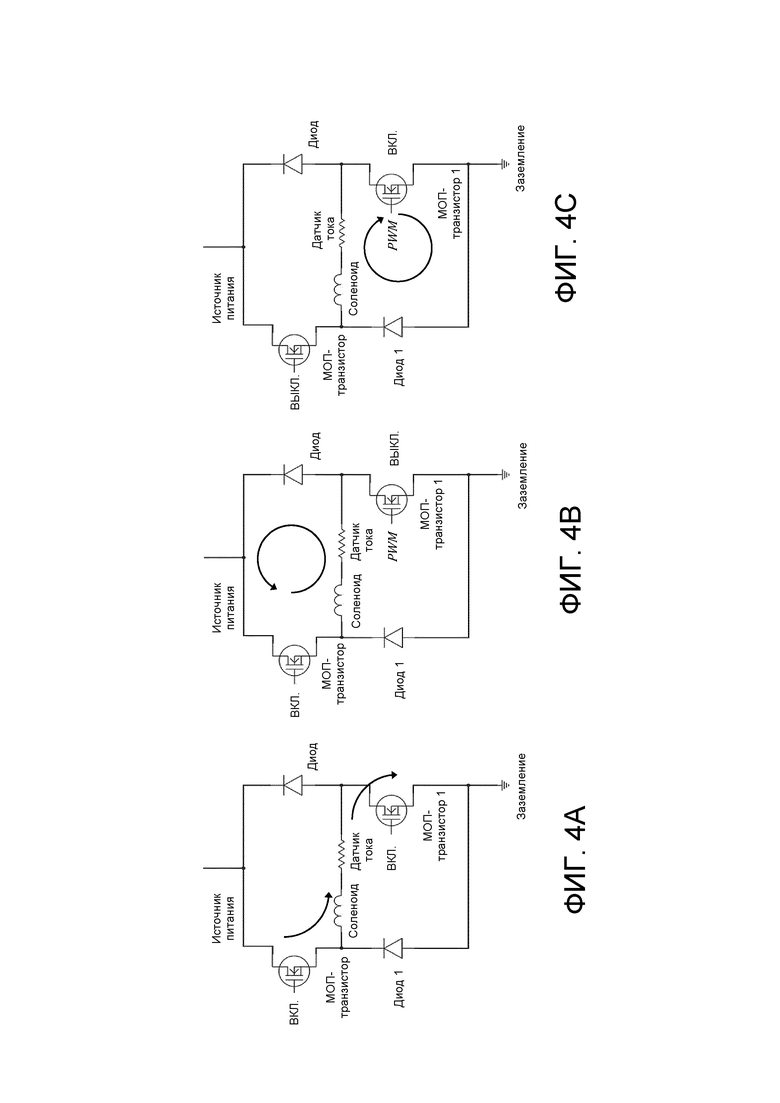
На ФИГ. 4A-D показана работа известного из уровня техники каскада драйвера, в котором в один момент времени выключают лишь один из переключающих элементов. В проиллюстрированном примере применяют сигнал возмущения с амплитудой 150 мА и частотой 75 Гц. Целевой средний ток составляет 200 мА.
На ФИГ. 4А показана первая стадия цикла привода, на которой оба переключающих элемента являются проводящими, а на ФИГ. 4В показана вторая стадия цикла привода, на которой верхний из переключающих элементов является проводящим, а нижний является непроводящим. На ФИГ. 4С показана третья стадия цикла привода, на которой нижний из переключающих элементов является проводящим и верхний является проводящим.
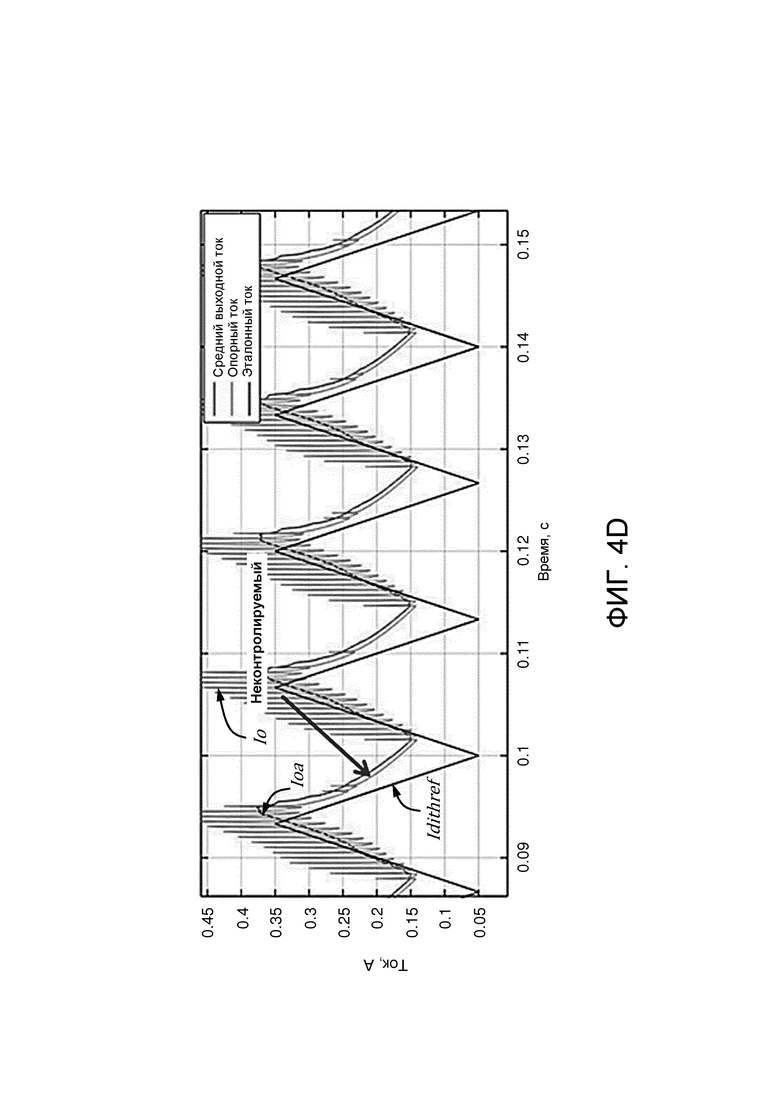
Соответствующие сигналы проиллюстрированы на ФИГ. 4D. На указанном чертеже позицией Idithref отмечено требуемое значение тока, имеющее целевое среднее значение в 200 мА и включающее сигнал возмущения для уменьшения статического трения. Позицией Io отмечен фактический ток через электромагнитно управляемый рабочий элемент 21. Указанный сигнал содержит высокочастотный компонент, введенный путем ШИМ-модуляции, с частотой примерно 2 кГц. Средний ток без высокочастотной составляющей, но включая составляющую возмущения с более низкой частотой, обозначен как Ioa. При рассмотрении ФИГ. 4D очевидно, что возникает значительное отклонение между требуемым током, обозначенным позицией Idithref, и средним током Ioa. Подобный результат указывает на то, что в указанной известной конфигурации сигнал возмущения вносит систематическое отклонение. Указанное систематическое отклонение заключается в относительно медленном уменьшении тока через электромагнитно управляемый рабочий элемент в ходе второй и третьей стадий цикла привода, как показано ниже. Обычно электромагнитно управляемый рабочий элемент электрически управляемого модуля управления гидравлическим давлением представляет собой соленоид, имеющий индуктивные характеристики.
В целях упрощения предположим, что переключающие элементы и диоды имеют идеальные характеристики переключения. Постоянная времени соленоидного клапана обозначена позицией τ, а ток, проходящий через соленоид при включении МОП-транзистора посредством сигнала ШИМ, обозначен позицией Ion. В таком случае ток через соленоид в режиме ВКЛ определяют по формуле:
 (1)
(1)
Ток, проходящий через соленоид при выключении МОП-транзистора посредством сигнала ШИМ, обозначен позицией Ioff. В таком случае ток через соленоид в режиме ВЫКЛ определяют по формуле:
 (2)
(2)
Контроллер тока управляет рабочим циклом сигнала ШИМ с целью поддержания требуемого значения тока Idithref. Однако электрическая постоянная времени и инерция золотника выше для соленоидных клапанов прямого действия, поскольку требуемая выходная сила является высокой. При использовании известной из уровня техники схемы входной ШИМ управляет напряжением на всем соленоиде между напряжением источника питания и прямым падением напряжения диода (≈0). Энергия, сохраненная в обмотке соленоида, должна быть разряжена в сопротивлении обмотки и в диоде. В указанном случае обеспечен более медленный путь разряда для сохраненной энергии, что указано в уравнении (2), так как согласно уравнению (1) и (2) отрицательный наклон, или ниспадающий фронт, тока соленоида ограничен. В случае превышения приложенным наклоном возмущения указанного предела ток в соленоиде становится неуправляемым, в результате чего средний ток Ioa выше, чем заданный ток Idithref. Указанная конфигурация накладывает значительные ограничения на применимые амплитуду и частоту возмущения для соленоидных клапанов прямого действия.
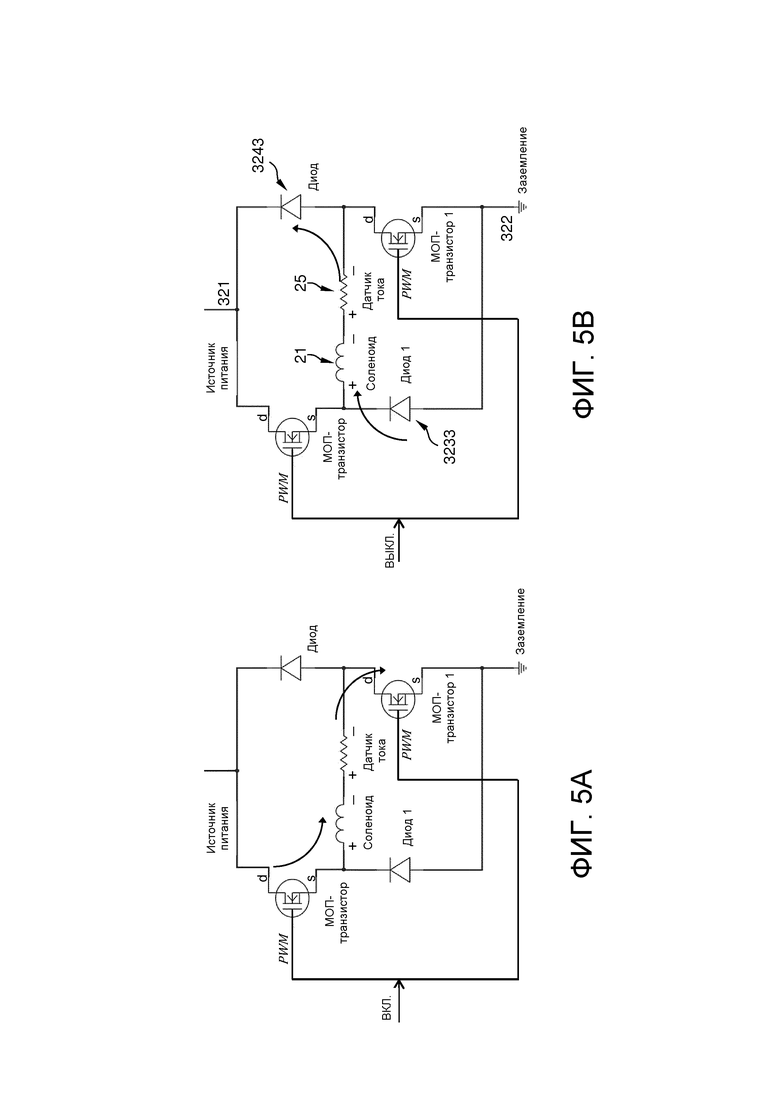
На ФИГ. 5A-C показана работа драйвера в электрически управляемой гидравлической системе по настоящему изобретению. В данном примере применяют сигнал возмущения с амплитудой 200 мА и частотой 200 Гц. Средний ток составляет 300 мА.
В системе по настоящему изобретению переключающие элементы одновременно переключают в проводящее состояние, как показано на ФИГ. 5A, и в непроводящее состояние, как показано на ФИГ. 5B.
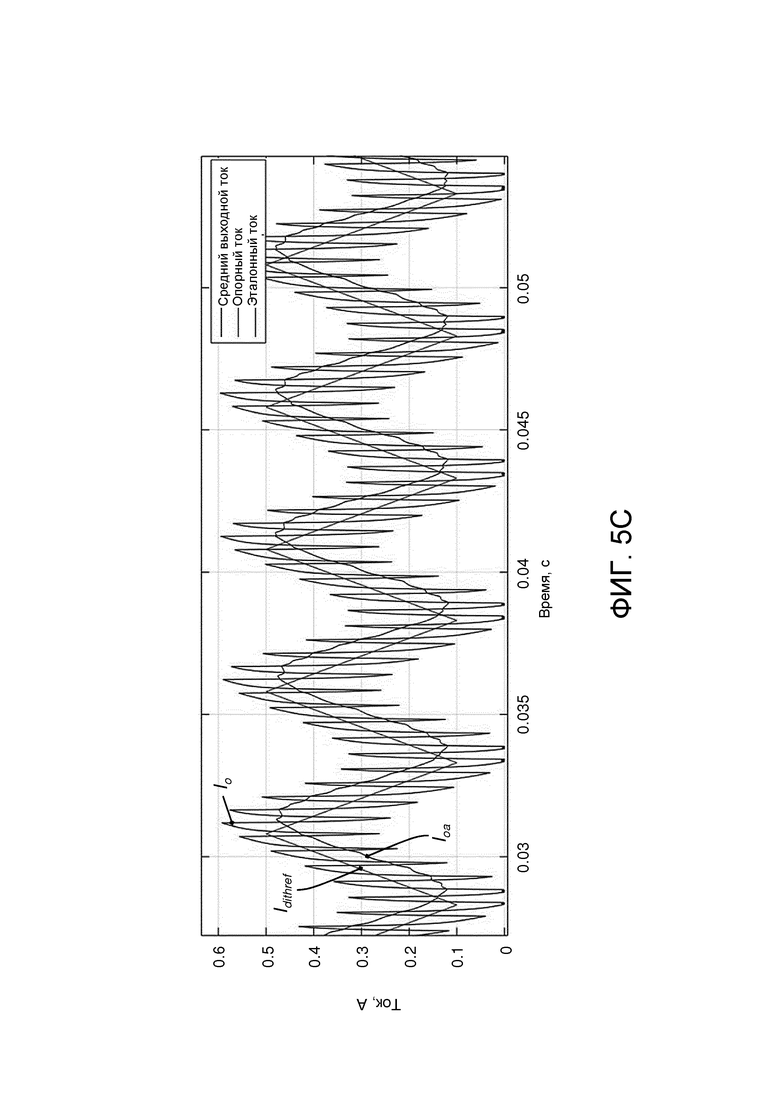
Соответствующие сигналы проиллюстрированы на ФИГ. 5C. На указанном чертеже позицией Idithref отмечено требуемое значение тока, имеющее целевое среднее значение в 300 мА и включающее сигнал возмущения для уменьшения статического трения. Позицией Io отмечен фактический ток через электромагнитно управляемый рабочий элемент 21 электрически управляемого модуля 1B управления гидравлическим давлением. Указанный сигнал содержит высокочастотный компонент, введенный путем ШИМ-модуляции, с частотой примерно 2 кГц. Средний ток без высокочастотной составляющей обозначен как Ioa. При рассмотрении ФИГ. 5C очевидно, что средний ток Ioa близко соответствует требуемому значению Idithref. Указанный результат достигнут благодаря тому, что на второй стадии цикла привода, согласно ФИГ. 5B, оба переключающих элемента одновременно находятся в непроводящем состоянии. В результате единственный доступный путь тока, через который может быть разряжен соленоид, образован цепью, содержащей однонаправленный проводящий элемент 3233, соленоид 21, необязательный элемент 25 датчика тока и однонаправленный проводящий элемент 3243. При этом напряжение питания на клеммах 321, 322, вызывает активное снижение тока в соответствии со следующим уравнением (3).
 (3)
(3)
По сравнению со случаем, заданным уравнением (2), при этом в цикле возмущения достигнуто значительно более быстрое снижение тока. Следовательно, новая электрически управляемая гидравлическая система обеспечивает существенно более широкий диапазон настройки частоты и амплитуды возмущения для компенсации статического трения. Таким образом, могут быть достигнуты более стабильные и точные реагирования на изменение давления, проявляемые электрически управляемым модулем 1B управления гидравлическим давлением.
В частности, высокоточное реагирования на изменение давления достигнуто благодаря тому, что сенсорный элемент 25 в электрически управляемой гидравлической системе представляет собой элемент датчика тока, размещенный последовательно с электромагнитно управляемым рабочим элементом 21 электрически управляемого модуля 1B управления гидравлическим давлением между первым и вторым узлами 3231, 3241 соединения. Сенсорный элемент 25 выполнен с возможностью определения тока Io, проходящего через электромагнитно управляемый рабочий элемент, в течение всего цикла драйвера, т.е. не только в проводящем состоянии переключающих элементов 3232, 3242, но также и в их непроводящем состоянии. При этом средний ток Ioa может быть определен более точно, что обеспечивает еще более точное управление элементом трансмиссии посредством электрически управляемого модуля 1B управления гидравлическим давлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы и системы для управления коммутацией напряжения | 2016 |
|
RU2713140C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДОРОЖНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2130839C1 |
| СИСТЕМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533956C2 |
| УПРАВЛЯЕМЫЙ ПРИВОД | 2008 |
|
RU2475931C2 |
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2226160C2 |
| РЕЛЕ СИСТЕМЫ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЯМИ КОРОБКИ ПЕРЕДАЧ | 2009 |
|
RU2509940C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657624C1 |
| Система автоматического управления и защиты многоступенчатой трансмиссии транспортного средства | 1988 |
|
SU1523417A1 |
| ПРОТИВООБЛЕДЕНИТЕЛЬНЫЕ СИСТЕМЫ | 2019 |
|
RU2800691C2 |
Изобретение относится к трансмиссиям транспортных средств. Электрически управляемая гидравлическая система для трансмиссии транспортного средства содержит систему нагнетательного насоса и подсистему, содержащую электрически управляемый модуль управления гидравлическим давлением. Подсистема имеет первую частоту среза, а электрически управляемый модуль имеет вторую частоту среза, превышающую первую частоту. Схема драйвера содержит мостовую схему с первой и второй ветвями питания между первой и второй клеммой источника питания. Ветви питания содержат управляемо проводящие каналы переключающих элементов и однонаправленные проводящие элементы. Электромагнитно управляемый рабочий элемент выполнен в виде нагрузки между первым и вторым узлами соединения. Управляющий сигнал схемы управления имеет рабочий цикл, соответствующий возмущенному входному значению. Значение возмущения варьируется в соответствии с периодической функцией с частотой возмущения в диапазоне, определенном первой и второй частотой. Повышается точность управления. 2 н. и 6 з.п. ф-лы, 5 ил.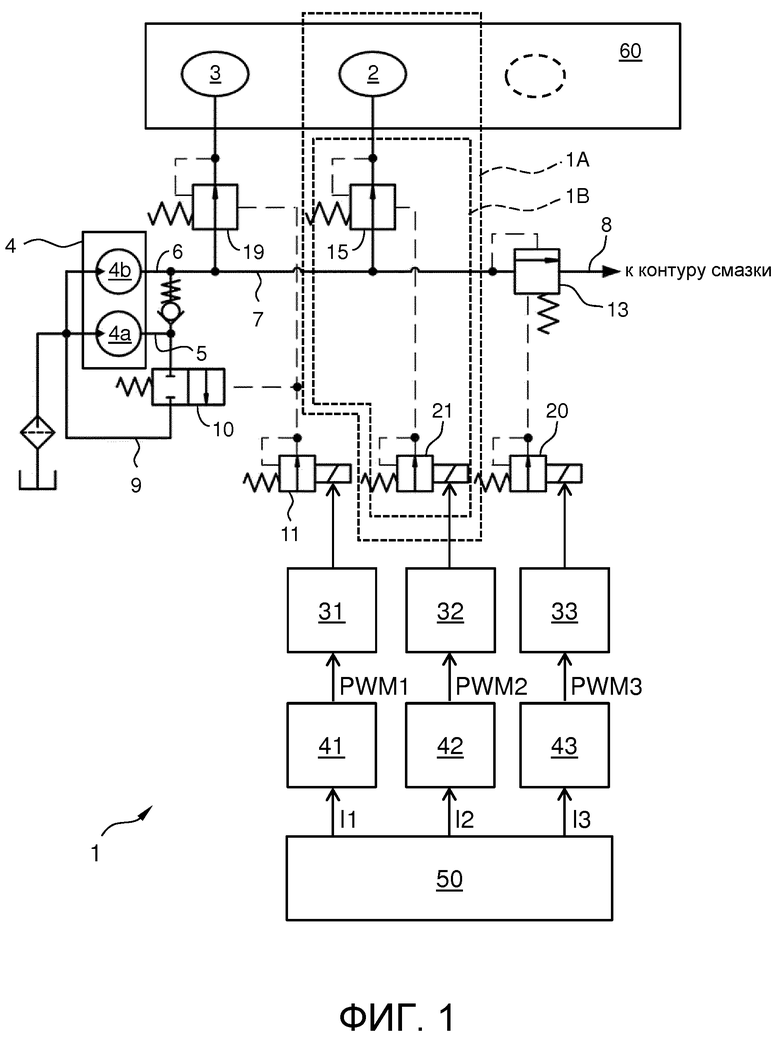
1. Электрически управляемая гидравлическая система для трансмиссии транспортного средства для сцепления и передачи мощности двигателя на колеса транспортного средства путем приведения в действие по меньшей мере одного элемента трансмиссии транспортного средства посредством гидравлической системы, причем гидравлическая система содержит:
- систему нагнетательного насоса;
- подсистему (1А), содержащую:
- по меньшей мере один элемент трансмиссии;
- электрически управляемый модуль управления гидравлическим давлением, содержащий элемент в виде гидравлического клапана для управления гидравлическим давлением, подаваемым на указанный по меньшей мере один элемент трансмиссии для обеспечения срабатывания указанного элемента трансмиссии в диапазоне срабатывания и электромагнитно управляемый рабочий элемент для обеспечения работы элемента в виде гидравлического клапана;
- причем подсистема имеет первую частоту среза, а электрически управляемый модуль управления гидравлическим давлением имеет вторую частоту среза, превышающую указанную первую частоту среза,
- схему драйвера для обеспечения сигнала привода для обеспечения управляемого привода электрически управляемого модуля управления гидравлическим давлением, причем:
схема драйвера содержит мостовую схему, имеющую первую ветвь питания и вторую ветвь питания, обеспеченные между первой клеммой источника питания и второй клеммой источника питания,
первая клемма источника питания и вторая клемма источника питания задают полярность источника питания,
первая ветвь питания содержит первый управляемо проводящий канал первого переключающего элемента между первой клеммой источника питания и первым узлом соединения и первый однонаправленный проводящий элемент, размещенный между первым узлом соединения и второй клеммой источника питания,
вторая ветвь питания содержит второй управляемо проводящий канал второго переключающего элемента между второй клеммой источника питания и вторым узлом соединения и второй однонаправленный проводящий элемент между вторым узлом соединения и первой клеммой источника питания,
каждый из первого и второго однонаправленных проводящих элементов размещен со своим непроводящим направлением относительно полярности источника питания, а
электромагнитно управляемый рабочий элемент обеспечен в виде нагрузки между указанным первым и указанным вторым узлами соединения для приема сигнала привода;
- схему управления, имеющую вход для приема входного сигнала (Iset), указывающего на требуемое значение указанного срабатывания указанного элемента трансмиссии, и для соответствующего обеспечения управляющего сигнала для одновременного управления первым и вторым переключающими элементами в первом режиме, в котором оба переключающих элемента являются проводящими, и во втором режиме, в котором оба переключающих элемента являются непроводящими,
причем управляющий сигнал имеет рабочий цикл, соответствующий возмущенному входному значению (Idithset), представляющему собой входное значение указанного входного сигнала, модифицированное значением возмущения (обозначенным позицией Idith),
причем значение возмущения варьируется в соответствии с периодической функцией с частотой (fdith) возмущения в диапазоне, определенном указанной первой частотой и указанной второй частотой.
2. Электрически управляемая гидравлическая система по п. 1, в которой управляющий сигнал подан в виде сигнала с широтно-импульсной модуляцией, имеющего ШИМ-частоту (fPWM), превышающую указанную вторую частоту.
3. Электрически управляемая гидравлическая система по п. 1 или 2, также содержащая сенсорный элемент для обеспечения сенсорного сигнала (Isense), указывающего на фактическое значение срабатывания элемента в виде гидравлического клапана указанного электрически управляемого модуля управления гидравлическим давлением,
причем схема управления также выполнена с возможностью обеспечения управляющего сигнала в соответствии с отклонением между фактическим значением указанного срабатывания, указываемым сенсорным сигналом (Isense), и требуемым значением указанного срабатывания, указываемым посредством указанного возмущенного входного значения (Idithset).
4. Электрически управляемая гидравлическая система по п. 3, в которой сенсорный элемент представляет собой элемент датчика тока, размещенный между первым и вторым узлами соединения последовательно с электромагнитно управляемым рабочим элементом электрически управляемого модуля управления гидравлическим давлением.
5. Электрически управляемая гидравлическая система по одному из предыдущих пунктов, в которой управляющий сигнал подан в виде сигнала с широтно-импульсной модуляцией, имеющего ШИМ-частоту (fPWM) в диапазоне от 500 до 10000 Гц.
6. Электрически управляемая гидравлическая система по одному из предыдущих пунктов, в которой частота возмущения (fdith) находится в диапазоне от 10 до 10000 Гц.
7. Электрически управляемая гидравлическая система по п. 6, в которой частота возмущения (fdith) находится в диапазоне от 10 до 500 Гц.
8. Способ электрического управления трансмиссией транспортного средства для сцепления и передачи мощности двигателя на колеса транспортного средства, причем система имеет по меньшей мере один элемент трансмиссии, а способ обеспечен для указанного управления путем приведения в действие указанного по меньшей мере одного элемента трансмиссии в диапазоне срабатывания с использованием электрически управляемого модуля управления гидравлическим давлением для приведения в действие указанного по меньшей мере одного элемента трансмиссии посредством гидравлической системы,
причем электрически управляемый модуль управления гидравлическим давлением содержит элемент в виде гидравлического клапана для управления гидравлическим давлением, подаваемым на указанный по меньшей мере один элемент трансмиссии, и электромагнитно управляемый рабочий элемент для обеспечения работы элемента в виде гидравлического клапана;
причем способ включает:
- прием входного сигнала (Iset), указывающего на требуемое значение указанного срабатывания в указанном диапазоне срабатывания;
- модификацию указанного входного сигнала значением возмущения (обозначенным позицией Idith), причем значение возмущения варьируется в соответствии с периодической функцией с частотой (fdith) возмущения;
- выработку управляющего сигнала с рабочим циклом, соответствующим возмущенному входному значению (Idithset),
- управление с помощью указанного управляющего сигнала парой из первого и второго электрических переключающих элементов, причем:
первый элемент размещен в первой ветви источника электропитания между первой клеммой источника питания и первым узлом соединения,
первая ветвь источника электропитания также содержит первый однонаправленный элемент между первым узлом соединения и второй клеммой источника питания,
второй переключающий элемент размещен во второй ветви источника электропитания между второй клеммой источника питания и вторым узлом соединения,
вторая ветвь источника электропитания также содержит второй однонаправленный элемент между вторым узлом соединения и первой клеммой источника питания, и
каждый из первого и второго однонаправленных проводящих элементов размещен со своим непроводящим направлением относительно полярности источника питания, заданной указанной первой и указанной второй клеммами источника питания,
- определение с помощью указанного управляющего сигнала тока в цепи привода для привода электромагнитно управляемого рабочего элемента электрически управляемого модуля управления гидравлическим давлением, причем:
управляющий сигнал попеременно обеспечивает переход первого и второго переключающих элементов одновременно в проводящий режим и в непроводящий режим,
элемент трансмиссии и электрически управляемый модуль управления гидравлическим давлением образуют подсистему с первой частотой среза,
электрически управляемый модуль управления гидравлическим давлением имеет вторую частоту среза, превышающую указанную первую частоту среза, а
частота (fdith) возмущения находится в диапазоне, определенном указанной первой частотой среза и указанной второй частотой среза.
| US 6023988 A, 15.02.2000 | |||
| US 2010087999 A1, 08.04.2010 | |||
| РЕЛЕ СИСТЕМЫ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЯМИ КОРОБКИ ПЕРЕДАЧ | 2009 |
|
RU2509940C2 |

