Изобретение относится к приводу, управляемому сигналом трехпозиционного регулирования, для приведения в действие исполнительных механизмов в соответствии с родовым типом, указанным в ограничительной части п.1 формулы изобретения.
Приводимыми в действие исполнительными механизмами могут быть, например, так называемые трехпозиционные клапаны, которые могут применяться для бытовых и технологических процессов в установках для регулирования потока жидкости. Так как специалистам известны такие исполнительные механизмы и их применение, то подробно эти пункты освещаться не будут.
Известные приводы, управляемые сигналом трехпозиционного регулирования, для приведения в действие исполнительных механизмов, могут управляться только посредством сигнала трехпозиционного регулирования, подобранного специально для них, так как известные приводы рассчитаны только на особый сигнал трехпозиционного регулирования определенного типа напряжения, определенной величины напряжения (и/или величины тока) и определенной частоты сигнала.
Так как существуют различные системы напряжений, к примеру, в других странах (например, в Германии и Европе переменный ток 230 В, 50 Гц, в США переменный ток 120 В, 60 Гц), то смотря по обстоятельствам и в зависимости от места применения, используют разные сигналы трехпозиционного регулирования. Таким образом, если существует требование, чтобы известные приводы управлялись при помощи разных сигналов трехпозиционного регулирования, то необходимо применять различные приводы, согласованные с соответствующим сигналом трехпозиционного регулирования.
Итак, известным приводам присущ недостаток, заключающийся в том, что они рассчитаны только на определенный сигнал трехпозиционного регулирования. Следовательно, для различных сигналов трехпозиционного регулирования приходится применять разные приводы. Это связано с большими финансовыми затратами.
Поэтому задача изобретения состоит в том, чтобы предложить привод, который позволяет решить описанные проблемы.
В изобретении эта задача решается благодаря приводу с признаками пункта 1 формулы изобретения.
В соответствии с изобретением, привод имеет согласующую цепь для согласования привода с различными сигналами трехпозиционного регулирования в соответствии с задаваемыми параметрами. В результате получают приводной механизм, управляемый сигналами трехпозиционного регулирования, которые отличаются друг от друга типом напряжения, величиной напряжения и/или тока, а также частоты, в результате чего отпадает необходимость в различных приводах.
Предпочтительные варианты реализации изобретения приведены в зависимых пунктах формулы изобретения.
Далее изобретение будет описываться более детально, ссылаясь на предпочтительный вариант реализации в сопровождении прикрепленного чертежа (фиг.1), на котором показан привод, согласно изобретению, со схематично изображенным исполнительным механизмом и схематично изображенной схемой для примерной генерации сигналов трехпозиционного регулирования.
На фиг.1 показан привод 1, согласно изобретению, управляемый сигналом трехпозиционного регулирования, который имеет согласующую цепь 2, соответствующую изобретению, и приводной механизм 3. Кроме того, показан исполнительный механизм 5 с трансмиссией 6 и клапаном 7, связанный с приводным механизмом 3 посредством вращательного вала 4, приводящего его в действие.
Из соображений наглядности концевые выключатели или аналогичные устройства, которые могут понадобиться для работы исполнительных механизмов, не показаны. Такие устройства и принцип их действия специалистам известны, поэтому в данном описании они подробно не рассматриваются.
Далее, привод 1 соединен со схемой 8 генерации сигналов трехпозиционного регулирования постоянного или переменного тока (постоянного или переменного напряжения) с помощью клемм, в этом случае с помощью входной контактной колодки 11, посредством электрических соединений (не показаны). Схема 8 имеет источник постоянного напряжения (DC, +/-), переключатель 9 постоянного напряжения, источник переменного напряжения (AC, L/N) и переключатель 10 переменного напряжения.
Схема 8 выполнена так, что на входную контактную колодку 11 приводного механизма 1 может подаваться сигнал трехпозиционного регулирования либо постоянного, либо переменного напряжения, но не одновременно оба сигнала и постоянного, и переменного напряжения.
Изображенная схема 8 служит для пояснения принципа действия изобретения и не является составной частью изобретения.
Ниже разъясняется принцип действия привода 1 согласно изобретению.
Как было уже замечено, приводом 1 управляют сигналы трехпозиционного регулирования как переменного, так и постоянного тока.
Под сигналом трехпозиционного регулирования обычно понимают сигнал для управления исполнительными механизмами, которые определяют три положения: открыто, закрыто и стоп.
В случае исполнительного механизма, которым управляет двигатель, эти положения соответствуют сигналам вращения против часовой стрелки (например, закрыто), по часовой стрелке (например, открыто) и отсутствия движения, т.е. исполнительный механизм сохраняет текущее положение (например, центральное положение).
Для управления приводом 1 посредством сигналов трехпозиционного регулирования постоянного напряжения на отдельные клеммы (обозначенные (+)L↑ и (-)L↓) контактной колодки 11 подают постоянное напряжение. В этом случае отдельная клемма, обозначенная буквой N, контактной колодки 11 остается незанятой, то есть без функции.
Для согласования сигналов трехпозиционного регулирования постоянного напряжения согласующая цепь 2 имеет модуль 12 постоянного напряжения, который только подключает постоянное напряжение, независимо от его полярности, к драйверу 13 двигателя и преобразует подключенное постоянное напряжение в значение, которое может обрабатываться драйвером 12 двигателя в соответствии с заранее заданными параметрами, например величина напряжения. Драйвер 13 двигателя определяет полярность постоянного напряжения, поданного на отдельные клеммы (+)L↑ и (-)L↓, а затем преобразованного модулем 12 постоянного напряжения, и соответствующим образом управляет приводным механизмом 3 (вращение против часовой стрелки, вращение по часовой стрелке).
Для согласования сигналов трехпозиционного регулирования переменного напряжения согласующая цепь 2 имеет два выпрямителя 14, два стандартных оптосоединителя 15, два оптосоединителя 16 для задания направления, регулятор 17 постоянного тока и преобразователь переменного/постоянного напряжения блока питания 18.
Для управления приводом 1 посредством сигналов трехпозиционного регулирования переменного напряжения, сигнал переменного напряжения подают либо на отдельные клеммы контактной колодки 11, обозначенные (+)L↑ и N, либо на отдельные клеммы контактной колодки 11, обозначенные (-)L↓ и N.
В обоих случаях переменное напряжение, приложенное между (+)L↑ и N или (-)L↓ и N, выпрямляется выпрямителем 14, соединенным с соответствующим входом. С помощью стандартного оптосоединителя 15, соединенного с соответствующим входом (+)L↑ или (-)L↓, на блок питания 18 подается переменное напряжение. Блок питания 18 в соответствии с задаваемыми параметрами преобразует приложенное переменное напряжение в постоянное напряжение, которое может быть обработано драйвером 13 двигателя для питания приводного механизма 3.
Через оптосоединители 16 для определения направления, которые соединены с соответствующим входом (+)L↑ или (-)L↓ (последовательно с выпрямителем 14 и стандартным оптосоединителем 15), в драйвер 13 двигателя через входы указанного драйвера 13 двигателя, обозначенные ↑ и ↓, поступает сигнал о направлении вращения.
Для защиты от тока перегрузки элементов, обозначенных позициями 14, 15 и 16, текущий через эти элементы ток при помощи регулятора 17 постоянного тока ограничивается до безопасного для них значения.
Если сигнал переменного напряжения недопустимым образом подается на оба входа (+)L↑ и (-)L↓, то регулятор 17 постоянного тока ограничивает ток, текущий через элементы, обозначенные позициями 14, 15 и 16, до значения, которое не допускает как подключения стандартного оптосоединителя 15, так и возникновения неопределенных коммутационных состояний.
Изобретение не ограничивается описанными примерами реализации, которые можно модифицировать различными путями.
Так, например, привод 1 может иметь приводной механизм 3 с высоким крутящим моментом отрыва во время старта.
Кроме того, привод 1 может иметь устройства, позволяющие менять скорость вращения и/или ограничивать крутящий момент приводного механизма 3.
Далее, привод 1 может иметь средства защиты от перегрузки, предотвращающие перегрев и повреждение приводного механизма 3 из-за слишком высокой температуры. Это может быть достигнуто, например, посредством контроля температуры приводного механизма и отключения приводного механизма 3 в случае его слишком высокой температуры.
В представленном примере реализации изобретения, сигнал трехпозиционного регулирования передает питание и информацию как на входную, так и на выходную сторону согласующей цепи 2 с помощью такого же сигнала. Тем не менее, такой единый узел вполне возможно разделить и использовать отдельные сигналы и/или линии передачи. Так, например, питание может передаваться по проводам, а информация о направлении может передаваться, например, без использования проводов.
Описанная согласующая цепь 2 может применяться также для исполнительных механизмов, приводимыми в действие гидроприводами и пневматическими приводными механизмами. Разумеется, в этом случае вводятся промежуточные элементы, коммутируемые и управляемые посредством электрических сигналов согласующей цепи 2, например, гидравлические и пневматические клапаны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ ЭКСПЛУАТАЦИОННОЙ БЕЗОПАСНОСТИ ВЫСОКОМОЩНОГО ВОЛОКОННОГО ЛАЗЕРА | 2016 |
|
RU2661450C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1971 |
|
SU298922A1 |
| Регулирующее устройство | 1982 |
|
SU1078577A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С МНОГОУРОВНЕВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289191C1 |
| Гидравлическая рулевая машина | 1981 |
|
SU948773A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ ВЫПРЯМИТЕЛЯ | 1998 |
|
RU2214674C2 |
Изобретение относится к области электротехники и может быть использовано для приведения в действие исполнительных механизмов. Техническим результатом является создание электропривода для различных сигналов трехпозиционного регулирования. Привод (1), управляемый сигналом трехпозиционного регулирования, с приводным механизмом (3) для приведения в действие исполнительного механизма (5), причем привод (1) содержит согласующую цепь (2) для согласования сигнала трехпозиционного регулирования с задаваемыми параметрами. 12 з.п. ф-лы, 1 ил.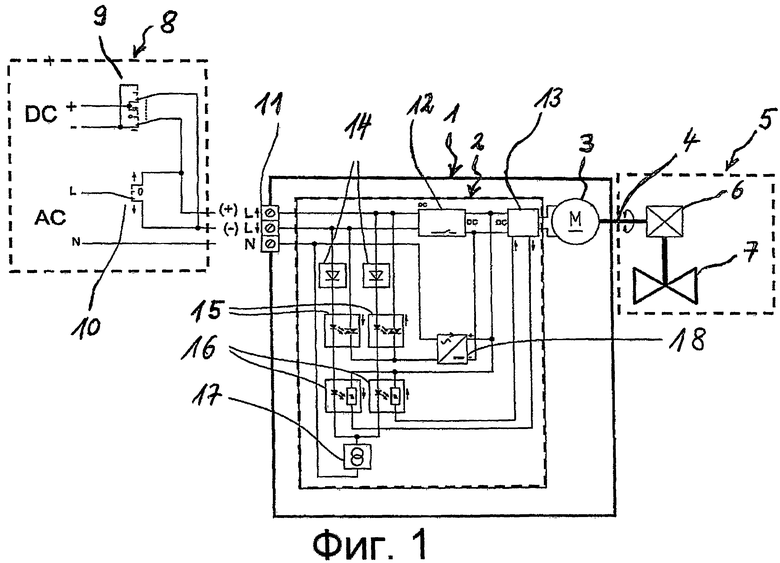
1. Привод (1), управляемый сигналом трехпозиционного регулирования, с приводным механизмом (3) для приведения в действие исполнительного механизма (5), отличающийся тем, что привод (1) имеет согласующую цепь (2) для согласования сигнала трехпозиционного регулирования с задаваемыми параметрами, причем сигнал трехпозиционного регулирования определяет три положения исполнительного механизма: открыто, закрыто и стоп, которые соответствуют сигналам вращения исполнительного механизма против часовой стрелки, например закрыто, по часовой стрелке, например открыто, и отсутствия движения, то есть сохранения исполнительным механизмом текущего положения, например центрального положения.
2. Привод (1) по п.1, отличающийся тем, что задаваемые параметры представляют собой один или несколько следующих параметров: тип напряжения - переменное или постоянное, величина напряжения, величина тока или частота сигнала трехпозиционного регулирования.
3. Привод (1) по п.1, отличающийся тем, что задаваемые параметры представляют собой один или несколько следующих параметров: тип напряжения - переменное или постоянное, диапазон значений напряжения, диапазон значений тока или диапазон частот сигнала трехпозиционного регулирования.
4. Привод (1) по п.1, отличающийся тем, что приводной механизм (3) представляет собой электродвигатель.
5. Привод (1) по п.4, отличающийся тем, что электродвигатель представляет собой бесщеточный или бесколлекторный электродвигатель.
6. Привод (1) по п.1, отличающийся тем, что приводной механизм (3) представляет собой гидравлический двигатель, управляемый посредством электрических сигналов.
7. Привод (1) по п.1, отличающийся тем, что приводной механизм (3) представляет собой пневмодвигатель, управляемый посредством электрических сигналов.
8. Привод (1) по любому из пп.1-7, отличающийся тем, что схема (8) выполнена так, что на входы (11) привода (1) может поступать сигнал трехпозиционного регулирования либо постоянного, либо переменного напряжения, но не одновременно оба сигнала и постоянного, и переменного напряжений.
9. Привод (1) по любому из пп.1-7, отличающийся тем, что согласующая цепь (2) имеет, по меньшей мере, один регулятор (17) постоянного тока.
10. Привод (1) по любому из пп.1-7, отличающийся тем, что согласующая цепь (2) имеет, по меньшей мере, одно средство (15, 16) для оптической связи электрических сигналов.
11. Привод (1) по любому из пп.1-7, отличающийся тем, что согласующая цепь (2) имеет, по меньшей мере, одно средство (12, 18), согласующее напряжение.
12. Привод (1) по любому из пп.1-7, отличающийся тем, что согласующая цепь (2) имеет модуль (12) постоянного напряжения, который лишь подключает постоянное напряжение независимо от его полярности к драйверу (13) двигателя и преобразует подключенное постоянное напряжение в значение, которое может быть обработано драйвером (13) двигателя в соответствии с заранее заданными параметрами.
13. Привод (1) по любому из пп.1-7, отличающийся тем, что согласующая цепь (2) для согласования сигналов трехпозиционного регулирования переменного напряжения имеет два выпрямителя (14), два стандартных оптосоединителя (15), два оптосоединителя (16) для задания направления, регулятор (17) постоянного тока и преобразователь (18) переменного/постоянного напряжения.
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2099848C1 |
| СХЕМА ПИТАНИЯ ЭЛЕКТРОПРИВОДА СО СГЛАЖИВАЮЩИМ ДРОССЕЛЕМ В ЦЕПИ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2224350C2 |
| Буровой станок | 1940 |
|
SU63612A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| Устройство управления асинхронным электродвигателем | 1974 |
|
SU524298A1 |
| Гербицидный состав | 1985 |
|
SU1434576A1 |
| US 20062035578 A1, 19.10.2006 | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |

