Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося подводного источника звука и измерения его координат в мелком море с помощью акустических комбинированных приемников, координаты которых и угловое положение считаются известными.
Общеизвестен способ определения азимутального угла и угла места подводного источника звука (Гордиенко В.А., Ильичев В.И., Захаров Л.Н. Векторно-фазовые методы в акустике. М: Наука, 1989. 223 с.). В этом способе с помощью комбинированного приемника, содержащего канал звукового давления и три векторных канала, измеряются три компоненты вектора интенсивности, а азимутальный угол на источник звука и угол места в локальной координатной системе, связанной с комбинированным приемником, определяются формулами
 (1)
(1)
 (2)
(2)
где ϕ, θ - азимутальный угол и угол места, Ix, Iy, Iz - компоненты вещественной составляющей вектора интенсивности.
Однако погрешность определения азимутального угла и угла места по формулам (1)-(2) достаточно велика, и особенно, в условиях мелкого моря и низких частот. Объясняется это тем, что комбинированный приемник является точечным приемником с дипольной характеристикой направленности в векторных каналах, а его помехоустойчивость, которая также влияет на погрешность определения азимутального угла и угла места по формулам (1)-(2), невелика и оценивается в 5-6 дБ. При работе в условиях мелкого моря и низких частот вектор интенсивности приобретает вихревую составляющую, которая существенно влияет на компоненты суммарного вектора интенсивности и на их отношение. Следовательно, она влияет и на погрешность определения азимутального угла и угла места по формулам (1)-(2), которые справедливы только для условий свободного пространства (глубокого моря), когда вектор интенсивности содержит только потенциальную составляющую. Кроме того, данный способ не позволяет определять дистанцию до источника звука и, следовательно, его координаты.
Известен гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море (Патент РФ №2739000), содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, число приемников N=H/Δz (где Н - глубина моря), каждый комбинированный приемник состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, которая включает в себя N-канальную подсистему определения горизонта источника, содержащую N-канальный блок сбора и первичной обработки информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок квадратичных детекторов вертикальной компоненты вектора колебательной скорости, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок формирования направленности по вертикальному потоку мощности, первый вход которого соединен с выходом блока вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, второй вход соединен с выходом блока квадратичных детекторов вертикальной компоненты вектора колебательной скорости, N-канальный блок интеграторов, вход которого соединен с первым выходом блока формирования направленности по вертикальному потоку мощности, блок определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока интеграторов, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, причем за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вещественной составляющей вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, N-канальную подсистему пеленгования, содержащую N-канальный блок формирования М пространственных каналов в каждом из N каналов, причем М=360°/Δφ, где Δφ - заданная погрешность определения пеленга, MN-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), MN-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), MN-канальный блок формирования набора информативных параметров для помехи (П), MN-канальный блок усреднения информативных параметров для суммарного процесса (С+П), MN-канальный блок усреднения информативных параметров для помехи (П), MN-канальный блок формирования отношения сигнал-помеха (ОСП) по всем информативным параметрам, MN-канальный компаратор, N-канальный блок формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N-канальный блок формирования (ВУР) в географической системе координат, блок формирования (ВУР) гидроакустического комплекса, выход которого соединён со вторым входом устройства доступа к цифровым сетям передачи данных, N-канальную подсистему обнаружения, содержащую N-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), N-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), N-канальный блок формирования набора информативных параметров для помехи (П), N-канальный блок усреднения информативных параметров для суммарного процесса (С+П), N-канальный блок усреднения информативных параметров для помехи (П), N-канальный блок формирования (ОСП) по всем информативным параметрам, N-канальный компаратор, выделяющий в каждом канале информативный параметр, которому соответствует максимальное значение  , выход которого соединён с третьим входом устройства доступа к цифровым сетям передачи данных, в котором существенно увеличена помехоустойчивость, дальность обнаружения источника звука и определения его угловых координат.
, выход которого соединён с третьим входом устройства доступа к цифровым сетям передачи данных, в котором существенно увеличена помехоустойчивость, дальность обнаружения источника звука и определения его угловых координат.
Настоящий комплекс является наиболее близким к заявленному изобретению и принят в качестве прототипа. Недостатком этого комплекса является невозможность определения дистанции до источника звука в пассивном режиме, а, следовательно, невозможность определения его координат. Задачей настоящего изобретения является устранение этого недостатка, т.е. разработка гидроакустического комплекса, позволяющего решать и проблему обнаружения, и проблему определения координат подводного источника звука в условиях мелкого моря и низких частот в пассивном режиме.
Для достижения указанной задачи в гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, число приемников N=H/Δz (где Н - глубина моря), каждый комбинированный приемник состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, первый телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, которая включает в себя N-канальную подсистему определения горизонта источника, содержащую N-канальный блок сбора и первичной обработки информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок квадратичных детекторов вертикальной компоненты вектора колебательной скорости, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок формирования направленности по вертикальному потоку мощности, первый вход которого соединен с выходом блока вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, второй вход соединен с выходом блока квадратичных детекторов вертикальной компоненты вектора колебательной скорости, N-канальный блок интеграторов, вход которого соединен с первым выходом блока формирования направленности по вертикальному потоку мощности, блок определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока интеграторов, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, причем за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вещественной составляющей вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, N-канальную подсистему пеленгования, содержащую N-канальный блок формирования М пространственных каналов в каждом из N каналов, причем М=360°/Δφ, где Δφ - заданная погрешность определения пеленга, MN-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), MN-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), MN-канальный блок формирования набора информативных параметров для помехи (П), MN-канальный блок усреднения информативных параметров для суммарного процесса (С+П), MN-канальный блок усреднения информативных параметров для помехи (П), MN-канальный блок формирования отношения сигнал-помеха (ОСП) по всем информативным параметрам, MN-канальный компаратор, N-канальный блок формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N-канальный блок формирования (ВУР) в географической системе координат, блок формирования (ВУР) гидроакустического комплекса, выход которого соединён со вторым входом устройства доступа к цифровым сетям передачи данных, N-канальную подсистему обнаружения, содержащую N-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), N-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), N-канальный блок формирования набора информативных параметров для помехи (П), N-канальный блок усреднения информативных параметров для суммарного процесса (С+П), N-канальный блок усреднения информативных параметров для помехи (П), N-канальный блок формирования (ОСП) по всем информативным параметрам, N-канальный компаратор, выделяющий в каждом канале информативный параметр, которому соответствует максимальное значение , выход которого соединён с третьим входом устройства доступа к цифровым сетям передачи данных, дополнительно введена подсистема определения дистанции до движущегося подводного источника звука, обнаруженного в пространственном канале φ=φm, содержащая N канальный селектор, вход которого соединён с выходом N-канального блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N канальный блок формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока формирования набора информативных параметров для суммарного процесса (С+П), а второй блок связан с выходом N канального селектора, N канальный блок определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, вход которого соединён с выходом блока формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, блок определения дистанции до источника звука, зарегистрированного в пространственном канале φ=φm, первый вход которого связан с выходом блока определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, второй вход связан с выходом блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, а выход связан с четвёртым входом устройства доступа к цифровым сетям передачи данных.
В предлагаемом комплексе существенными признаками, общими с прототипом, являются гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, число приемников N=H/Δz (где Н - глубина моря), каждый комбинированный приемник состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, которая включает в себя N-канальную подсистему определения горизонта источника, содержащую N-канальный блок сбора и первичной обработки информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок квадратичных детекторов вертикальной компоненты вектора колебательной скорости, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок формирования направленности по вертикальному потоку мощности, первый вход которого соединен с выходом блока вычисления вертикальной компоненты вещественной составляющей вектора интенсивности, второй вход соединен с выходом блока квадратичных детекторов вертикальной компоненты вектора колебательной скорости, N-канальный блок интеграторов, вход которого соединен с первым выходом блока формирования направленности по вертикальному потоку мощности, блок определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока интеграторов, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, причем за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вещественной составляющей вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вещественной составляющей вектора интенсивности, N-канальную подсистему пеленгования, содержащую N-канальный блок формирования М пространственных каналов в каждом из N каналов, причем М=360°/Δφ, где Δφ - заданная погрешность определения пеленга, MN-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), MN-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), MN-канальный блок формирования набора информативных параметров для помехи (П), MN-канальный блок усреднения информативных параметров для суммарного процесса (С+П), MN-канальный блок усреднения информативных параметров для помехи (П), MN-канальный блок формирования отношения сигнал-помеха (ОСП) по всем информативным параметрам, MN-канальный компаратор, N-канальный блок формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N-канальный блок формирования (ВУР) в географической системе координат, блок формирования (ВУР) гидроакустического комплекса, выход которого соединён со вторым входом устройства доступа к цифровым сетям передачи данных, N-канальную подсистему обнаружения, содержащую N-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), N-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), N-канальный блок формирования набора информативных параметров для помехи (П), N-канальный блок усреднения информативных параметров для суммарного процесса (С+П), N-канальный блок усреднения информативных параметров для помехи (П), N-канальный блок формирования (ОСП) по всем информативным параметрам, N-канальный компаратор, выделяющий в каждом канале информативный параметр, которому соответствует максимальное значение , выход которого соединён с третьим входом устройства доступа к цифровым сетям передачи данных.
Отличительными существенными признаками являются: подсистема определения дистанции до движущегося подводного источника звука, обнаруженного в пространственном канале φ=φm, содержащая N канальный селектор, вход которого соединён с выходом N-канального блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N канальный блок формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока формирования набора информативных параметров для суммарного процесса (С+П), а второй блок связан с выходом N-канального селектора, N канальный блок определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, вход которого соединён с выходом блока формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, блок определения дистанции до источника звука, зарегистрированного в пространственном канале φ=φm, первый вход которого связан с выходом блока определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, второй вход связан с выходом блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, а выход связан с четвёртым входом устройства доступа к цифровым сетям передачи данных.
Таким образом, именно такая совокупность существенных признаков заявленного устройства позволяет не только обнаруживать подводный источник звука в условиях мелкого моря и низких частот, но и определять его координаты в пассивном режиме.
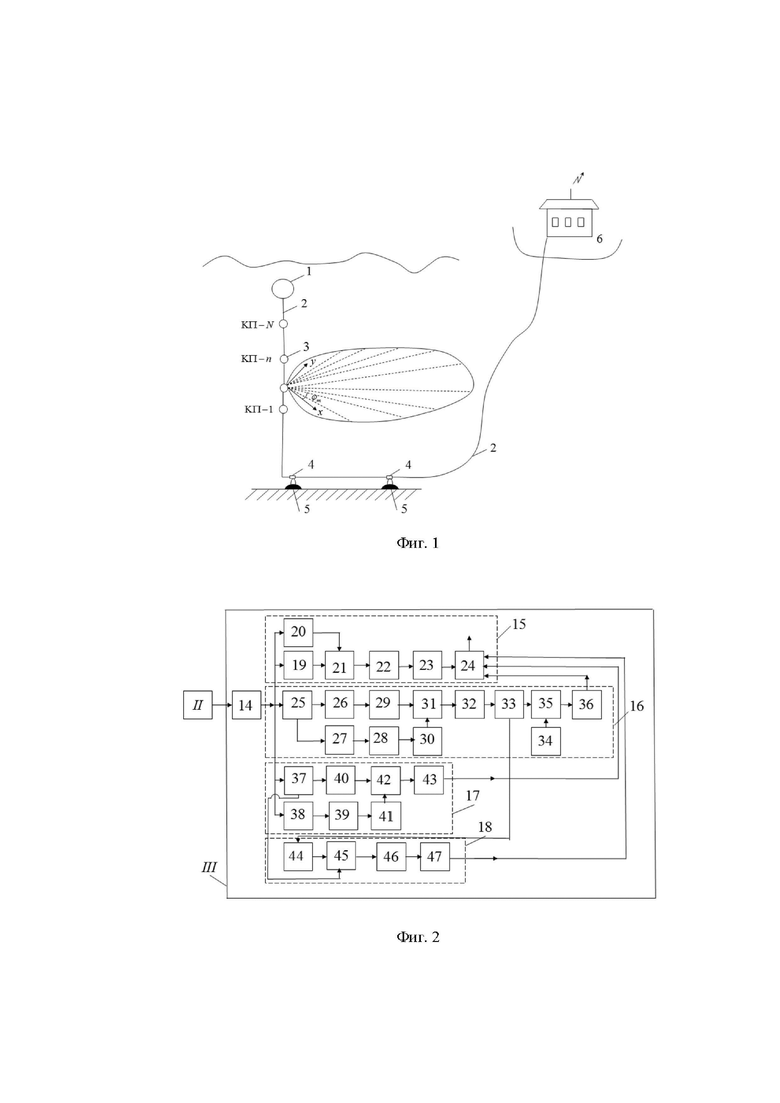
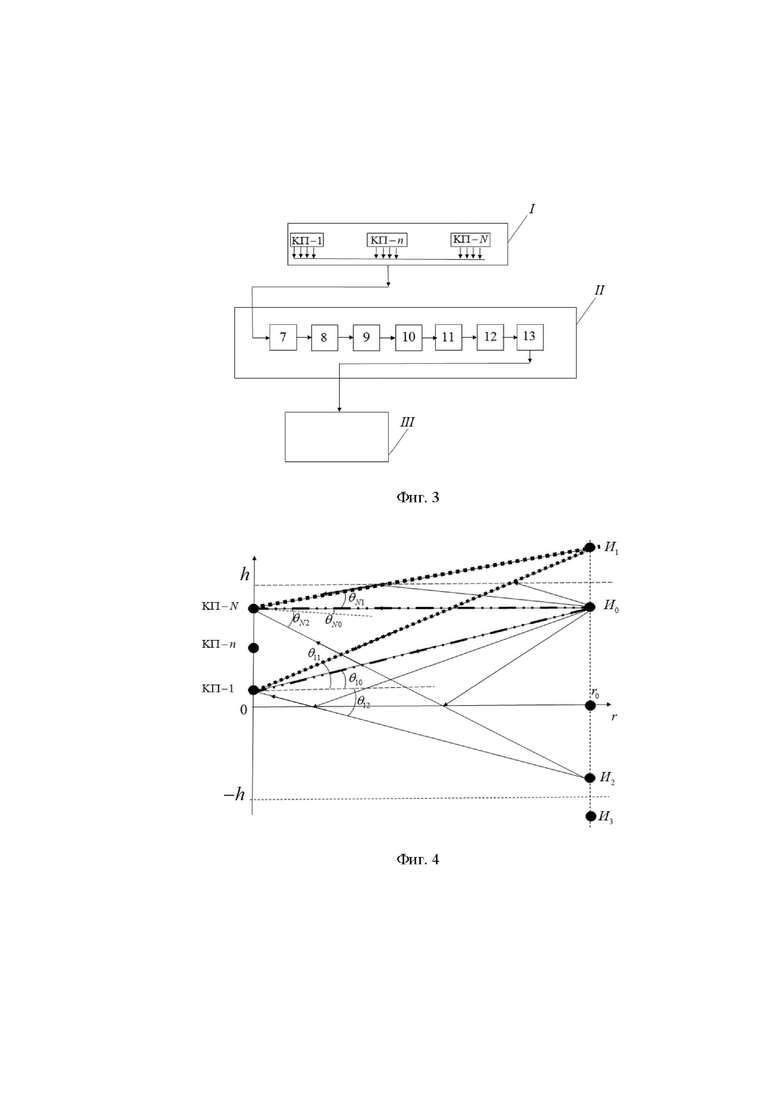
Сущность изобретения поясняется чертежами. На фиг. 1 представлена донная вертикально ориентированная эквидистантная антенна и система пространственных каналов в горизонтальной плоскости, сформированных для каждого приёмного модуля. Фиг. 2 поясняет укрупнённую блок-схему гидроакустического комплекса. Фиг.3 поясняет структуру системы сбора, обработки и отображения информации. На фиг. 4 представлены источник звука и система мнимых источников, которые появляются при работе реального источника в мелком море. Там же показан набор измеряемых значений угла места для лучей, регистрируемых каждым комбинированным приёмником, которые могут быть использованы для определения расстояния до источника звука в пассивном режиме.
Заявленный гидроакустический комплекс для обнаружения движущегося источника звука и определения его координат в мелком море содержит донную вертикально ориентированную эквидистантную антенну I, телеметрический блок II, систему III сбора, обработки и отображения информации.
Донная вертикально ориентированная эквидистантная антенна I образуется посредством N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника градиента давления и соединенных с ним усилителей (на чертеже не показаны). Схема установки антенны, поясняется фиг. 1. Антенна I включает в себя плавучесть 1, оптоволоконный кабель–трос 2, комбинированные приёмники в обтекателях 3, кабельные зажимы 4 служат для крепления кабель - троса 2 к донным якорям 5. Оптоволоконный кабель–трос 2 поступает в береговой пост 6.
Телеметрический блок II включает в себя делители напряжения 7, аналого-цифровую преобразующую схему 8, единую схему 9 электронного мультиплексирования, модулятор 10 и оптический излучатель 11, связанный оптической линией связи 12 с оптическим ресивером 13.
Система III сбора, обработки и отображения информации включает в себя N-канальный блок 14 сбора и первичной обработки информации, вход которого соединен с выходом оптического ресивера 13, N-канальную подсистему 15 определения горизонта источника, N-канальную подсистему 16 пеленгования, N-канальную подсистему 17 обнаружения и N канальную подсистему 18 определения дистанции до источника звука.
N-канальная подсистема 15 определения горизонта источника включает в себя N канальный блок 19 вертикальной компоненты вещественной составляющей вектора интенсивности, вход которого соединен с выходом блока 14 сбора и первичной обработки информации, N-канальный блок 20 квадратичных детекторов вертикальной компоненты вектора колебательной скорости, вход которого соединен с выходом блока 14 сбора, обработки и отображения информации, N-канальный блок 21 формирования направленности по вертикальному потоку мощности, первый вход которого соединен с выходом блока 19 вычисления вертикальной компоненты вектора интенсивности, второй вход соединен с выходом блока 20 квадратичных детекторов вертикальной компоненты вектора колебательной скорости, N-канальный блок 22 интеграторов, вход которого соединен с первым выходом блока 21 формирования направленности по вертикальному потоку мощности, блок 23 определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока 22 интеграторов, устройство 24 доступа к цифровым сетям передачи данных, первый вход которого соединен с выходом блока 23 определения максимума вертикальной компоненты вектора интенсивности.
N-канальная подсистема 16 пеленгования включает в себя N-канальный блок 25 формирования М пространственных каналов в каждом из N каналов, причем М=360°/Δφ, где Δφ - заданная погрешность определения пеленга, вход которого соединен с выходом N-канального блока 14 сбора и первичной обработки информации, MN-канальный блок 26 формирования набора информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом N-канального блока 25 формирования М пространственных каналов, MN-канальный блок 27 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), вход которого соединен с выходом N-канального блока 25 формирования М пространственных каналов, MN-канальный блок 28 формирования набора информативных параметров для помехи (П), вход которого соединен с выходом MN-канального блока 27 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), MN-канальный блок 29 усреднения информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом MN-канального блока 26 формирования набора информативных параметров для суммарного процесса (С+П), MN-канальный блок 30 усреднения информативных параметров для помехи (П), вход которого соединен с выходом MN-канального блока 28 формирования набора информативных параметров для помехи (П), MN-канальный блок 31 формирования (ОСП) по всем информативным параметрам, вход которого соединен с выходами блоков 29, 30 усреднения информативных параметров для суммарного процесса (С+П) и помехи (П), MN-канальный компаратор 32, вход которого соединен с выходом MN-канального блока 31 формирования (ОСП) по всем информативным параметрам, N-канальный блок 33 формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, вход которого соединен с выходом MN-канального компаратора 32, компас 34 N-го канала, N-канальный блок 35 формирования (ВУР) в географической системе координат, первый вход которого соединен с выходом N-канального блока 33 формирования (ВУР) в локальной системе координат, а второй вход соединен с выходом компаса 34 N-го канала, блок 36 формирования (ВУР) гидроакустического комплекса, вход которого соединен с выходом N-канального блока 35 формирования (ВУР) в географической системе координат, а выход соединен со вторым входом устройства 24 доступа к цифровым сетям передачи данных.
N-канальная подсистема 17 обнаружения включает в себя N-канальный блок 37 формирования набора информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом N-канального блока 14 сбора и первичной обработки информации, N-канальный блок 38 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), вход которого соединен с выходом N-канального блока 14 сбора и первичной обработки информации, N-канальный блока 39 формирования набора информативных параметров для помехи (П), вход которого соединен с выходом N-канального блока 38 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), N-канальный блок 40 усреднения информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом N-канального блока 37 формирования набора информативных параметров для суммарного процесса (С+П), N-канальный блок 41 усреднения информативных параметров для помехи (П), вход которого соединен с выходом N-канального блока 39 формирования набора информативных параметров для помехи (П), N-канальный блок 42 формирования (ОСП) по всем информативным параметрам, вход которого соединен с выходами блоков 40, 41 усреднения информативных параметров для суммарного процесса (С+П) и помехи (П), N-канальный компаратор 43, вход которого соединен с выходом N-канального блока 42 формирования (ОСП) по всем информативным параметрам, выделяющий в каждом канале информативный параметр, которому соответствует максимальное значение , выход которого соединен с третьим входом устройства 24 доступа к цифровым сетям передачи данных.
N канальная подсистема 18 определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, включает в себя N канальный селектор 44, вход которого соединён с выходом N-канального блока 33 формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N канальный блок 45 формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором 44 пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока 37 формирования набора информативных параметров для суммарного процесса (С+П), а второй вход связан с выходом N канального селектора 44, N канальный блок 46 определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, вход которого соединён с выходом блока 45, блок 47 определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, первый вход которого связан с выходом блока 46 определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, второй вход связан с выходом блока 33 формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, а выход связан с четвёртым входом устройства 24 доступа к цифровым сетям передачи данных.
Гидроакустический комплекс работает следующим образом.
Звуковая волна, излучаемая источником звука, принимается акустическими комбинированными приемниками, образующими донную вертикально ориентированную эквидистантную антенну I. Все сигналы с выходов акустических приемников поступают на вход телеметрического блока II, а после прохождения через делители напряжения 7, аналого-цифровую преобразующую схему 8 и единую схему 9 электронного мультиплексирования преобразуются в поток цифровой информации, поступающей через модулятор 10, оптический излучатель 11 и оптическую линию 12 связи на оптический ресивер 13. С выхода оптического ресивера 13 информация поступает в цифровом виде на вход блока 14 сбора, обработки и отображения информации, находящегося в системе III сбора, обработки и отображения информации. В блоке 14 сбора и первичной обработки информации сигналы вновь разделяются по отдельным каналам звукового давления и компонент вектора градиента давления (или вектора колебательной скорости). После применения быстрого преобразования Фурье (БПФ) сигналы поступают в виде соответствующих спектральных плотностей звукового давления р(ω, r(t)), компонент вектора колебательной скорости νх(ω, r(t)), νy(ω, r(t)), νz(ω, r(t)) и компонент вектора градиента давления gx(ω, r(t)), gy(ω, r(t)), gz(ω, r(t)) в соответствующие подсистемы для последующей обработки.
С выхода блока 14 сигналы поступают на вход подсистемы 15 определения горизонта источника в N канальный блок 19 вычисления вертикальной компоненты вещественной составляющей вектора интенсивности Iz(ω, r(t)) и в N канальный блок 20 квадратичных детекторов вертикальной компоненты вектора колебательной скорости с последующим формированием односторонне направленных вертикальных потоков мощности в N канальном блоке 21. Для формирования потоков мощности, направленных в сторону отрицательной оси z (от морского дна в сторону поверхности моря) используется алгоритм

где μp,n, Uν,n чувствительность канала звукового давления и канала вертикальной компоненты вектора колебательной скорости для n-го комбинированного приемника соответственно. Этот поток мощности не содержит потока мощности в поле помехи, направленного в сторону положительной оси z (от поверхности моря в сторону морского дна). Сформированные в блоке 21 односторонне направленные потоки мощности усредняются в N канальном блоке интеграторов 22, а затем подаются на вход блока 23 выбора максимального по уровню сигнала. Сигнал максимального уровня подается на первый вход устройства 24 устройства доступа к цифровым сетям передачи данных, а за горизонт источника принимается горизонт комбинированного приемника, которому соответствует максимальный уровень вертикальной компоненты вещественной составляющей вектора интенсивности.
Кроме того, сигналы с выхода блока 14 поступают в подсистему 16 пеленгования на вход блока 25 формирования М пространственных каналов в каждом из N каналов. В этом блоке происходит преобразование горизонтальных компонент вектора интенсивности νx.n(ω, r(t)), νy,n(ω, r(t)), измеренных в локальной системе координат (х,у), связанной с n-ым комбинированным приемником, в компоненты να(ω,r(t)), νβ(ω,r(t)) в повернутой на угол ϕm системе координат (α, β) по формулам (4)

где ϕm=(m-1)Δϕ, Δφ - заданная погрешность определения пеленга. С выхода блока 25 сигналы поступают на вход MN-канального блока 26 формирования набора из 13 информативных параметров для суммарного процесса (С+П) по формулам (5)
 - вещественная и мнимая составляющие комплексного вектора интенсивности.
- вещественная и мнимая составляющие комплексного вектора интенсивности.
Сформированные в блоке 26 информативные параметры полностью характеризуют структуру односторонне направленных потоков мощности в плоскости (r,z) в каждом пространственном канале с учетом присутствия вихревой составляющей вектора интенсивности. Вихревая составляющая вектора интенсивности вносит существенный вклад в суммарное поле вектора интенсивности в условиях мелкого моря и низких частот. Сигналы с выхода блока 25 поступают на вход MN-канального блока 27 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П). В качестве достаточно общего алгоритма выделения помехи (П) из суммарного процесса (С+П) можно использовать следующий алгоритм
2Δƒ0 - ширина окна Хэмминга.
где ƒ0 - средняя частота частотного канала, Δƒ0 - варьируемый параметр, примерно на порядок превышающий ширину дискретной составляющей Δƒ в спектре суммарного процесса (сигнал плюс помеха), АП(f0, t), АС+П(f0, t), параметры звукового поля (звуковое давление, компоненты вектора колебательной скорости и вектора градиента давления) для помехи (П) и для суммарного процесса (С+П), L число усредняемых спектральных отсчетов.
С выхода блока 27 выделения помехи (П) из суммарного случайного процесса (С+П) сигналы поступают в MN канальный блок 28 вычисления полного набора информативных параметров Ai (i=1-13) для помехи (П) по формулам (5). Сформированные в блоках 26, 28 наборы информативных параметров для суммарного процесса (С+П) и для помехи (П) усредняются во временной области окном Хэмминга в MN канальных блоках 29, 30 соответственно и поступают на вход MN канального блока 31 определения отношения сигнал-помеха (ОСП) по каждому информативному параметру.
Сформированные в блоке 31 значения (ОСП) по каждому информативному параметру поступают на вход MN канального компаратора 32, в котором выбирается информативный параметр, которому соответствует максимальное значение (ОСП)max из набора 13 информативных параметров. Использование набора информативных параметров, а не одного параметра, как в случае приемника звукового давления, позволяет существенно увеличить значение (ОСП) в каждом пространственном канале и, соответственно, уменьшить погрешность определения азимутального угла в каждом пространственном канале. Сигналы с выхода MN канального компаратора 32 поступают на вход N канального блока 33 формирования время - углового распределения (ВУР)n принятых сигналов во всем диапазоне изменения азимутальных углов в локальной системе координат, связанной с каждым приемником. Эти сигналы поступают на вход блока 35 формирования (ВУР) принятых сигналов в географической системе координат во всем диапазоне изменения усредненных пеленгов на шумящий объект, на второй вход которого поступают сигналы от N блоков-компасов 34. Компасы 34 определяют положение локальной системы координат n-го приемника относительно географической системы координат по формулам
где φn - пеленг на шумящий объект в географической системе координат, ϕn0 - угловое положение оси Х локальной системы координат n-го приемника относительно севера по показаниям n-го компаса. Сигналы с выхода блока 35 поступают на вход блока 36 усреднения пеленгов. Усредненный пеленг в блоке 36 определяется по формулам усреднения с весом, а в качестве весовых коэффициентов используются значения (ОСП)max,n.

Усредненные пеленги в виде усредненного (ВУР) поступают на второй вход устройства 24 доступа к цифровым сетям передачи данных.
Кроме того, сигналы с выхода N канального блока 14 поступают в подсистему обнаружения 17 на вход N канального блока 37 формирования набора информативных параметров для суммарного процесса (С+П) и на вход N канального блока 38 выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), с выхода которого сигналы поступают на вход N канального блока 39 формирования набора информативных параметров для помехи (П). В подсистеме обнаружения полный набор 16 информативных параметров формируется из следующих величин: B1=|p|2, B2=Ix, В3=Iy, B4=Iz, B5=Qx, B6=Qy, B7=QZ, B8=rotxI, B9=rotyI, B10=rotzI, B11=g1x2, B12=g1y2, В13=g1z2, B14=g2x2, B15=g2y2, B16=g2z2, p=p1+ip2, g=g1+ig2,
где g-компоненты вектора градиента давления.
Сигналы с выхода блоков 37, 39 усредняются во временной области окном Хэмминга в блоках 40, 41 и поступают на вход N канального блока 42 формирования (ОСП) по всем информативным параметрам. С выхода блока 42 сигналы поступают на вход N канального компаратора 43, в котором выбирается информативный параметр, которому соответствует максимальное значение (ОСП)max. На выходе N канального компаратора 43 формируется 3D-сонограмма в координатах частота в заданном рабочем диапазоне частот – время - нормированный уровень сигнала (дБ). Информация в виде 3D-сонограмм для каждого комбинированного приемника подается на третий вход устройства 24 доступа к цифровым сетям передачи данных, а решение об обнаружении принимается путем сравнения с пороговым значением (ОСП) максимального (ОСП)max, вычисленного в одном из каналов N-канального компаратора.
Кроме того, информация с выхода N канального блока 33 формирования время - углового распределения (ВУР)n принятых сигналов во всем диапазоне изменения азимутальных углов в локальной системе координат, связанной с каждым приемником, поступает на вход N канального селектора 44 в виде параметров пространственного канала φ=φm, в котором обнаружен источник звука. Сигнал с выхода селектора поступает на вход N канального блока 45 формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором 44 пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока 37 формирования набора информативных параметров для суммарного процесса (С+П), а второй вход связан с выходом N канального селектора 44. В этом блоке вычисляются для каждого комбинированного приёмника горизонтальная и вертикальная компоненты комплексного вектора интенсивности по формулам
 (8)
(8)

где:  определяются формулами (4).
определяются формулами (4).
 (9)
(9)
По найденным компонентам комплексного вектора интенсивности в N канальном блоке 46 определяются углы места для лучей, зарегистрированных каждой парой комбинированных приёмников (1,n), по формулам
 (10)
(10)
Измеряя углы места для лучей, зарегистрированных каждой парой комбинированных приёмников (1,n), и зная расстояние между ними, можно определить дистанцию между источником звука, обнаруженном в пространственном канале φ=φm, и приёмной антенной по формуле
 (11)
(11)
Усредняя результаты измерения дистанции по формуле (11) с весовыми коэффициентами, пропорциональными парциальной мощности (П1+Пn), приходящейся на каждое измерение, получаем искомую формулу (12).
 (12)
(12)

При выводе формул (11)-(12) следует воспользоваться представлением источника звука, работающего в мелком море (волноводе) в виде набора источников, реального и мнимых, (Бреховских Л.М. Волны в слоистых средах. М. Из-во АН СССР. 1957г. С.306). Лучевая трактовка распространения сигналов от реального источника И0 и системы мнимых источников И1, И2, И3 и т.д. до комбинированных приёмников антенны поясняется рис.4. Усреднённый с весом результат измерения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, передаётся с выхода блока 47 на четвёртый вход устройства 24 доступа к цифровым сетям передачи данных.
Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося источника звука и измерения его координат в мелком море в пассивном режиме с помощью акустических комбинированных приемников, устанавливаемых на морском дне, координаты которых и угловое положение считаются известными. В заявке описана конструкция гидроакустического комплекса, в том числе блочная система сбора, обработки и отображения информации. Обеспечивается возможность не только обнаруживать шумящий подводный объект, но и определять его координаты в пассивном режиме. 4 ил.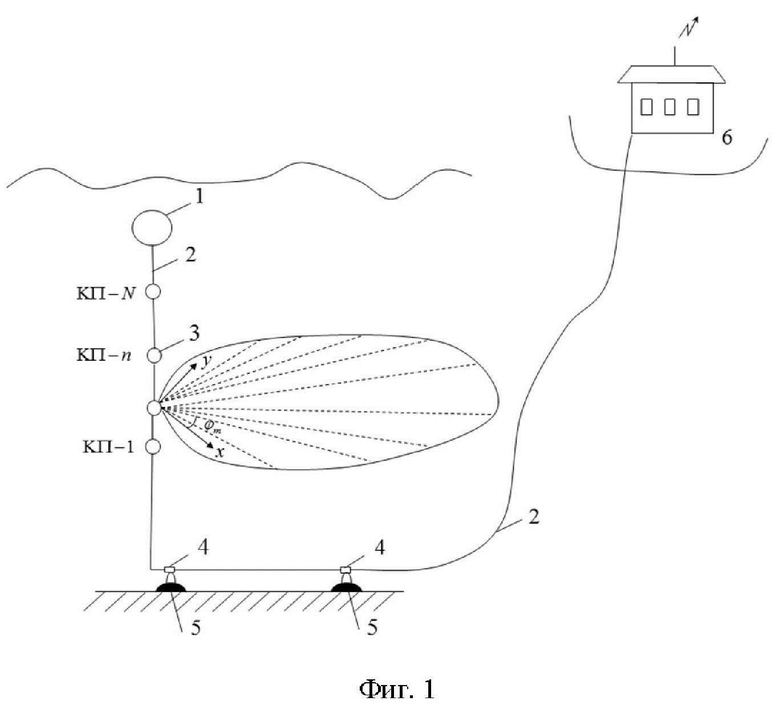
Гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, число приемников N=H/Δz (где Н - глубина моря), каждый комбинированный приемник состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей; телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и отображения информации, включающую в себя N-канальную подсистему определения горизонта источника, содержащую N-канальный блок сбора и первичной обработки информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок квадратичных детекторов вертикальной компоненты вектора колебательной скорости, вход которого соединен с выходом блока сбора и первичной обработки информации, N-канальный блок формирования направленности по вертикальному потоку мощности, первый вход которого соединен с выходом блока вычисления вертикальной компоненты вектора интенсивности, второй вход соединен с выходом блока квадратичных детекторов вертикальной компоненты вектора колебательной скорости, N-канальный блок интеграторов, вход которого соединен с первым выходом блока формирования направленности по вертикальному потоку мощности, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока интеграторов, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, причем за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности, N-канальную подсистему пеленгования, содержащую N-канальный блок формирования М пространственных каналов в каждом из N каналов, причем М=360°/Δφ, где Δφ - заданная погрешность определения пеленга, вход которого соединен с выходом N-канального блока сбора и первичной обработки информации, MN-канальный блок формирования набора информативных параметров для суммарного процесса сигнал плюс помеха (С+П), вход которого соединен с выходом N-канального блока формирования М пространственных каналов, MN-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), вход которого соединен с выходом N-канального блока формирования М пространственных каналов, MN-канальный блок формирования набора информативных параметров для помехи (П), вход которого соединен с выходом MN-канального блока выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), MN-канальный блок усреднения информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом MN-канального блока формирования набора информативных параметров для суммарного процесса (С+П), MN-канальный блок усреднения информативных параметров для помехи (П), вход которого соединен с выходом MN-канального блока формирования набора информативных параметров для помехи (П), MN-канальный блок формирования отношения сигнал-помеха (ОСП) по всем информативным параметрам, вход которого соединен с выходами блоков усреднения информативных параметров для суммарного процесса (С+П) и помехи (П), MN-канальный компаратор, вход которого соединен с выходом MN-канального блока формирования (ОСП) по всем информативным параметрам, N-канальный блок формирования время-углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, вход которого соединен с выходом MN-канального компаратора, компас N-го канала, N-канальный блок формирования (ВУР) в географической системе координат, первый вход которого соединен с выходом N-канального блока формирования (ВУР) в локальной системе координат, а второй вход соединен с выходом компаса N-го канала, блок формирования (ВУР) гидроакустического комплекса, вход которого соединен с выходом N-канального блока формирования (ВУР) в географической системе координат, а выход соединен со вторым входом устройства доступа к цифровым сетям передачи данных, N-канальную подсистему обнаружения, содержащую N-канальный блок формирования набора информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом N-канального блока сбора и первичной обработки информации, N-канальный блок выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), вход которого соединен с выходом N-канального блока сбора обработки и отображения информации, N-канальный блок формирования набора информативных параметров для помехи (П), вход которого соединен с выходом N-канального блока выделения из текущих значений суммарного случайного процесса (С+П) текущих значений помехи (П), N-канальный блок усреднения информативных параметров для суммарного процесса (С+П), вход которого соединен с выходом N-канального блока формирования набора информативных параметров для суммарного процесса (С+П), N-канальный блок усреднения информативных параметров для помехи (П), вход которого соединен с выходом N-канального блока формирования набора информативных параметров для помехи (П), N-канальный блок формирования (ОСП) по всем информативным параметрам, вход которого соединен с выходами блоков усреднения информативных параметров для суммарного процесса (С+П) и помехи (П), N-канальный компаратор, вход которого соединен с выходом N-канального блока формирования (ОСП) по всем информативным параметрам, выделяющий в каждом канале информативный параметр, которому соответствует максимальное значение  , а выход соединён с третьим входом устройства доступа к цифровым сетям передачи данных, принимают в качестве модельной статистики поля помехи в канале звукового давления и в каналах вектора колебательной скорости гауссову статистику, принимают в качестве модельной статистики поля помехи для квадратичных по полю информативных параметров лапласову статистику, вычисляют на основе принятых статистик аналитическую зависимость вероятность правильного обнаружения при заданной вероятности ложной тревоги от порогового (ОСП) по методу максимального правдоподобия, принимают решение об обнаружении путем сравнения с пороговым значением (ОСП) максимального , вычисленного в каждом канале N-канального компаратора, отличающийся тем, что в него введена N канальная подсистема определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, включающая в себя N канальный селектор, вход которого соединён с выходом N-канального блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N канальный блок формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока формирования набора информативных параметров для суммарного процесса (С+П), а второй вход связан с выходом N канального селектора, N канальный блок определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, вход которого связан с выходом блока формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, блок определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, первый вход которого связан с выходом блока определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, второй вход связан с выходом блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, а выход связан с четвёртым входом устройства доступа к цифровым сетям передачи данных.
, а выход соединён с третьим входом устройства доступа к цифровым сетям передачи данных, принимают в качестве модельной статистики поля помехи в канале звукового давления и в каналах вектора колебательной скорости гауссову статистику, принимают в качестве модельной статистики поля помехи для квадратичных по полю информативных параметров лапласову статистику, вычисляют на основе принятых статистик аналитическую зависимость вероятность правильного обнаружения при заданной вероятности ложной тревоги от порогового (ОСП) по методу максимального правдоподобия, принимают решение об обнаружении путем сравнения с пороговым значением (ОСП) максимального , вычисленного в каждом канале N-канального компаратора, отличающийся тем, что в него введена N канальная подсистема определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, включающая в себя N канальный селектор, вход которого соединён с выходом N-канального блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, N канальный блок формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, первый вход которого соединён с выходом N-канального блока формирования набора информативных параметров для суммарного процесса (С+П), а второй вход связан с выходом N канального селектора, N канальный блок определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, вход которого связан с выходом блока формирования горизонтальной и вертикальной компонент комплексного вектора интенсивности для суммарного процесса (С+П) в выбранном селектором пространственном канале φ=φm, блок определения дистанции до источника звука, обнаруженного в пространственном канале φ=φm, первый вход которого связан с выходом блока определения угла места для лучей, зарегистрированных каждым комбинированным приёмником, второй вход связан с выходом блока формирования время - углового распределения (ВУР) в локальной системе координат, связанной с комбинированным приемником, а выход связан с четвёртым входом устройства доступа к цифровым сетям передачи данных.
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| Способ обнаружения шумящих объектов в мелком и глубоком море | 2019 |
|
RU2702917C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ЗАГЛУБЛЕННОГО ИСТОЧНИКА ЗВУКА И ИЗМЕРЕНИЯ ЕГО КООРДИНАТ В МЕЛКОМ МОРЕ | 2013 |
|
RU2537472C1 |
| Гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника звука в мелком море | 2017 |
|
RU2653587C1 |

