Область техники
Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника в мелком море в пассивном режиме с помощью акустических приемников, установленных на морском дне, координаты которых и угловое положение считаются известными.
Предшествующий уровень техники
Известно устройство (Патент РФ на полезную модель №82972, МПК: Н04В 10/00) для измерения азимутального угла на источник звука и угла места в пассивном режиме, в котором используется многоканальный цифровой комбинированный гидроакустический комплекс, содержащий N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, содержащую блок сбора обработки и отображения информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора обработки и отображения информации, и формирователь диаграммы направленности, вход и выход которого соединены со входом и выходом блока сбора обработки и отображения информации. В этом устройстве измеряются компоненты вектора интенсивности Ix, Iy Iz в локальной ортогональной системе координат, связанной с акустическим комбинированным приемником, а направление на источник звука определяется по формуле

где ϕ-азимутальный угол в горизонтальной плоскости, отсчитываемый от оси X локальной системы координат, связанной с акустическим комбинированным приемником. При необходимости результаты измерений углового положения источника звука в локальной системе координат пересчитываются в пеленг.
Аналогичным образом можно определить угол места, если акустический комбинированный приемник расположен в ближней зоне источника звука

Недостатком этого устройства является невозможность значительного увеличения числа акустических комбинированных приемников и апертуры антенны из-за значительных дисперсионных искажений акустического сигнала при его распространении в мелком море. Вследствие таких искажений алгоритмы фазирования сигналов, принятых отдельными элементами антенны, которые положены в основу функционирования формирователя диаграммы направленности, и сами алгоритмы определением азимутального угла на источник звука по формуле (1) и угла места по формуле (2) становятся неэффективными. В результате дальность действия измерительной антенны не увеличивается, а погрешность измерения пеленга не уменьшается при увеличении апертуры антенны. Кроме того, недостатком этого устройства является большая погрешность измерения горизонта источника с использованием формулы (2) при работе измерительного комплекса в мелком море и малая дальность обнаружения источника звука.
Известен также гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника звука в мелком море (Патент РФ №2488133 МПК G01S 3/80, Н04В 11/00, опубл. 20.07.2013 г. бюлл. №20), в котором для увеличения дальности действия и уменьшения погрешности определения координат источника звука гидроакустическом измерительном комплексе, содержащем N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и отображения информации, содержащую блок сбора, обработки и отображения информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора, обработки и передачи информации, посредством N акустических комбинированных приемников образуется донная вертикально ориентированная эквидистантная антенна, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/Δz, где Н - глубина моря.
Кроме того, в систему сбора, обработки и отображения информации дополнительно введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока вычисления азимутального угла, а второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, причем усредненный азимутальный угол определяется формулой

где ϕn, Ixn, Iyn-азимутальный угол и компоненты вектора интенсивности, относящиеся к n-ому акустическому комбинированному приемнику, а за горизонт источника принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности. Информация с выхода блока вычисления усредненного азимутального угла и блока определения максимума вертикальной компоненты вектора интенсивности поступает на первый и второй входы устройства доступа к цифровым сетям передачи данных.
Кроме того, для увеличения дальности обнаружения движущегося источника звука и поддержания с ним акустического контакта в систему сбора, обработки и отображения информации дополнительно введены сумматор, на вход которого поступают сигналы с выхода N-канального блока вычисления вертикальной компоненты вектора интенсивности, анализатор спектра комплексной огибающей, вход которого соединен с выходом сумматора, вычислитель максимума спектра комплексной огибающей, вход которого соединен с выходом анализатора спектра комплексной огибающей, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных. Это устройство по технической сути является наиболее близким к предлагаемому изобретению.
Его недостатком является сравнительно малая помехоустойчивость и дальность действия, что объясняется тем, что элементарный приемник вертикальной компоненты вектора интенсивности является дипольным приемником, помехоустойчивость которого составляет 5-6 дБ, а вторичная обработка комплексной огибающей вертикальной компоненты вектора интенсивности повышает помехоустойчивость дополнительно всего на 5-10 дБ.
Раскрытие изобретения
В основу настоящего изобретения поставлена задача повышения помехоустойчивости элементарного комбинированного приемника и всего комплекса в целом, а также увеличение дальности действия за счет увеличения направленных свойств элементарного комбинированного приемника по горизонтальному потоку мощности и усреднения изотропной помехи в каналах измерения горизонтального потока мощности.
Для достижения поставленной задачи в гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/Δz (где Н - глубина моря), каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока вычисления азимутального угла, второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, а выход соединен со вторым входом устройства доступа к цифровым сетям передачи данных, сумматор, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, анализатора спектра комплексной огибающей, вход которого соединен с выходом сумматора, вычислитель максимума спектра комплексной огибающей, вход которого соединен с выходом анализатора спектра комплексной огибающей, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных, причем усредненный азимутальный угол определяется формулой

где ϕn, Ixn, Iyn-азимутальный угол и горизонтальные компоненты вектора интенсивности, относящиеся к n-y акустическому комбинированному приемнику, за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности, а в качестве признака обнаружения движущегося источника звука принимается степень превышения максимума спектра комплексной огибающей вертикальной компоненты вектора интенсивности, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем спектральной плотности фоновой шумовой помехи, дополнительно введена N-канальная подсистема обнаружения источника звука по горизонтальному потоку мощности. Эта подсистема содержит N-канальный блок вычисления компонент вектора колебательной скорости в повернутой системе координат, вход которого соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок вычисления компонент вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок усреднения изотропной помехи, первый вход которого соединен с выходом блока вычисления горизонтальных компонент вектора интенсивности, а второй вход соединен с выходом блока вычисления компонент вектора интенсивности в повернутой системе координат, N-канальный блок квадратичных детекторов компонент вектора колебательной скорости, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок формирования направленности по горизонтальному потоку мощности, первый вход которого соединен с выходом блока усреднения изотропной помехи, а второй вход соединен с выходом блока квадратичных детекторов компонент вектора колебательной скорости, N-канальный блок усреднения тыльного потока мощности, вход которого соединен с выходом блока формирования направленности по горизонтальному потоку мощности, N-канальный блок квадратичных детекторов потока мощности, вход которого соединен с выходом блока усреднения тыльного потока мощности, N-канальный блок интеграторов, вход которого соединен с выходом блока квадратичных детекторов потока мощности, выход соединен со входом устройства доступа к цифровым сетям передачи данных, а в качестве признака обнаружения движущегося источника звука принимается степень превышения уровня сигнала на выходе интегратора, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем фоновой шумовой помехи.
На выходе N-канального блок вычисления компонент вектора колебательной скорости в повернутой системе координат вычисляются компоненты вектора колебательной скорости να, νβ в повернутой системе координат по формулам


где  комплексные амплитуды спектральных составляющих на частоте ω на расстоянии r(t) для компонент вектора колебательной скорости в локальной системе координат, связанной с приемником, ϕ0 угол поворота.
комплексные амплитуды спектральных составляющих на частоте ω на расстоянии r(t) для компонент вектора колебательной скорости в локальной системе координат, связанной с приемником, ϕ0 угол поворота.
На выходе N-канального блока вычисления компонент вектора интенсивности в повернутой системе координат вычисляются компоненты вектора интенсивности Iα, Iβ в повернутой системе координат по формулам

p(ω,r(t)) - комплексная амплитуда спектральной составляющей на частоте со на расстоянии r(t) для звукового давления.
На выходе N-канального блока усреднения изотропной помехи вычисляются величины
На выходе N-канального блока формирования направленности по горизонтальному потоку мощности вычисляются величины
где  μр, μν чувствительность приемника звукового давления
μр, μν чувствительность приемника звукового давления
и приемника колебательной скорости на частоте со соответственно.
На выходе N-канального блока усреднения тыльного потока мощности вычисляются усредненные величины
На выходе интеграторов в N-канальном блоке интеграторов вычисляются усредненные величины

где Т, T1 предварительно определенные интервалы усреднения, причем Т≥λ/2с, с - предварительно заданная скорость движения источника звука, λ-длина волны на рабочей частоте, T1≥10T.
В предлагаемом гидроакустическом комплексе существенными признаками общими с прототипом являются:
- N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей,
- телеметрический блок, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером,
- система сброса, обработки и передачи информации, содержащая блок сбора, обработки и передачи информации, и устройство доступа к цифровым сетям передачи данных,
- акустическими комбинированными приемниками образуется донная вертикально ориентированная эквидистантная антенна, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/ Δz,
- N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации,
- блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности,
- N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации,
- N-канальный блок вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности,
- блок вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока вычисления азимутального угла, а второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности,
усредненный азимутальный угол определяется формулой

где ϕn, Ixn, Iyn-азимутальный угол и компоненты вектора интенсивности, относящиеся к n-у акустическому комбинированному приемнику,
- горизонт источника звука принимается равным горизонту акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности,
- сумматор, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности,
- анализатор спектра комплексной огибающей, вход которого соединен с выходом сумматора,
- вычислитель максимума спектра комплексной огибающей, вход которого соединен с выходом анализатора спектра комплексной огибающей
- в качестве признака обнаружения движущегося источника звука принимается степень превышения максимума спектра комплексной огибающей вертикальной компоненты вектора интенсивности, принимаемая в качестве предварительно определенного порога обнаружения, над уровнем спектральной плотности фоновой шумовой помехи.
Отличительными существенными признаками являются:
N-канальная подсистема обнаружения источника звука по горизонтальному потоку мощности, содержащая:
N-канальный блок вычисления компонент вектора колебательной скорости в повернутой системе координат, вход которого соединен с выходом блока сбора, обработки и передачи информации;
N-канальный блок вычисления компонент вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации;
N-канальный блок усреднения изотропной помехи, первый вход которого соединен с выходом блока вычисления горизонтальных компонент вектора интенсивности, а второй вход соединен с выходом блока вычисления компонент вектора интенсивности в повернутой системе координат,
N-канальный блок квадратичных детекторов компонент вектора колебательной скорости, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации;
N-канальный блок усреднения изотропной помехи, первый вход которого соединен с выходом блока вычисления горизонтальных компонент вектора интенсивности, а второй вход соединен с выходом блока вычисления компонент вектора интенсивности в повернутой системе координат,
N-канальный блок формирования направленности по горизонтальному потоку мощности, первый вход которого соединен с выходом блока усреднения изотропной помехи, а второй вход соединен с выходом блока квадратичных детекторов компонент вектора колебательной скорости,
N-канальный блок усреднения тыльного потока мощности, вход которого соединен с выходом блока формирования направленности по горизонтальному потоку мощности,
N-канальный блок квадратичных детекторов потока мощности, вход которого соединен с выходом блока усреднения тыльного потока мощности, N-канальный блок интеграторов, вход которого соединен с выходом блока квадратичных детекторов потока мощности, а выход соединен со входом устройства доступа к цифровым сетям передачи данных.
В качестве признака обнаружения движущегося источника звука принимается степень превышения уровня сигнала на выходе интегратора, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем фоновой шумовой помехи.
Таким образом, именно такая совокупность существенных признаков заявленного устройства позволяет создать гидроакустический измерительный комплекс для измерения азимутального угла на источник звука и горизонта источника, увеличить помехоустойчивость измерительного комплекса за счет формирования направленности по горизонтальному потоку мощности, усреднения изотропной помехи в каналах измерения горизонтального потока мощности, усреднения тыльного потока мощности в блоках формирования направленного приема и увеличить дальность обнаружения источника звука при работе комплекса в мелком море.
Новизна предлагаемого устройства заключается в том, что в нем с использованием смешанных алгоритмов аддитивно - мультипликативной обработки сформированы восемь пространственных каналов с характеристиками направленности вида
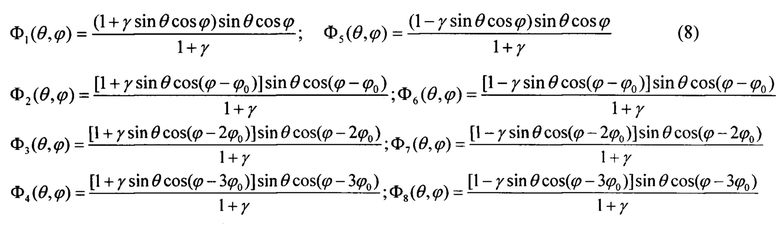
При оптимальном выборе весового коэффициента γ=5/3 коэффициент осевой концентрации, определяющий помехоустойчивость приемной системы, достигает максимального значения К=8, что позволяет увеличить помехоустойчивость измерительного комплекса в режиме обнаружения на 3-4 дБ в сравнении с прототипом.
Кроме того, усреднение изотропной составляющей помехи в каналах измерения горизонтальных потоков мощности позволяет повысить помехоустойчивость комбинированного приемника примерно на 10 дБ, как это подтверждено экспериментально в работе Щуров В.А., Щуров А.В. Помехоустойчивость гидроакустического комбинированного приемника // Акустический журнал. 2002. Т. 48, №1. С. 110-119.
Кроме того, в предлагаемом изобретении учтена особенность формирования односторонне направленного приема по потоку мощности. Эта особенность заключается в том, поток мощности в тыльном направлении не обращается в нуль, а становится знакопеременным с нулевым средним значением. По этой причине в каждый канал N-канальной подсистемы обнаружения источника звука по горизонтальному потоку мощности включен 8-канальный блок (по числу сформированных пространственных каналов) усреднения тыльного потока мощности, вход которого соединен с выходом блока формирования направленности по горизонтальному потоку мощности.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
Краткое описание чертежей
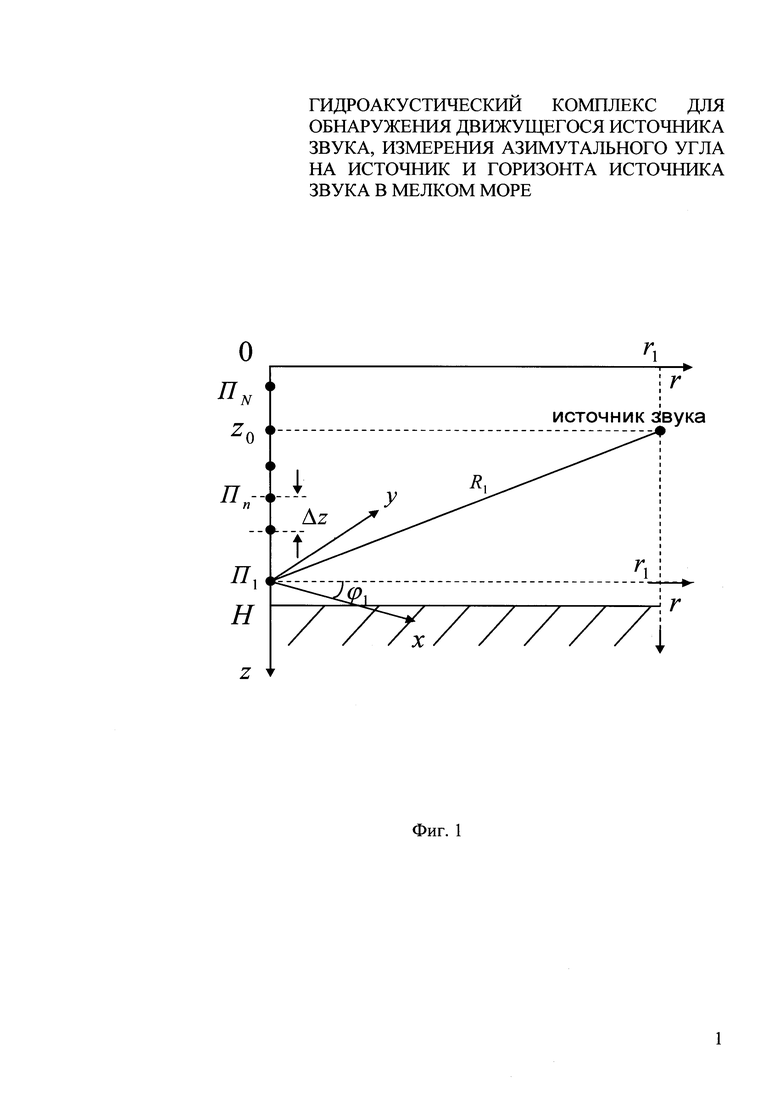
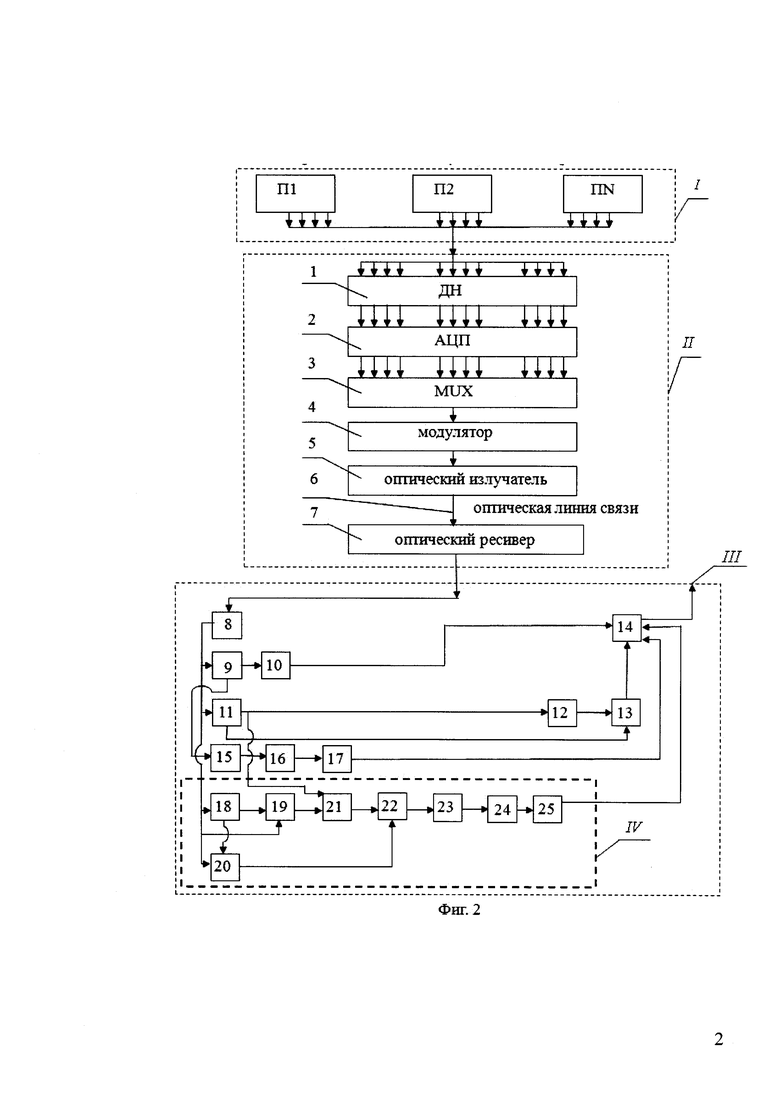
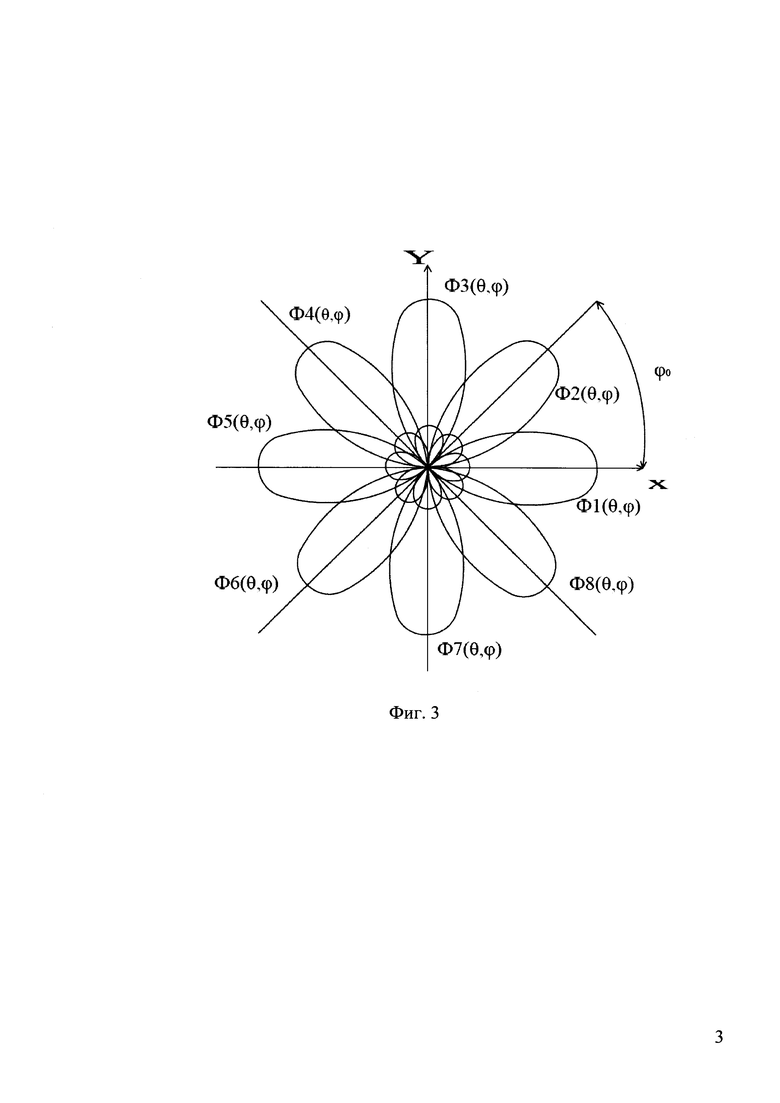
Сущность изобретения поясняется чертежами, где: на фиг. 1 представлена донная вертикально ориентированная эквидистантная антенна и схема расположения акустических приемников и источника звука относительно локальной системы координат; на фиг. 2 представлена блок-схема гидроакустического измерительного комплекса, на фиг. 3 представлены характеристики направленности отдельного комбинированного приемника, образующие 8 - канальный статический веер характеристик направленности.
Заявленный гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник звука и горизонта источника в мелком море содержит донную вертикально ориентированную эквидистантную антенну I, телеметрический блок II и систему III сбора, обработки и передачи информации.
Донная вертикально ориентированная эквидистантная антенна I образуется посредством N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей (на чертеже не показаны). Геометрия расположения акустических приемников и источника звука относительно локальной системы координат поясняется фиг. 1.
Телеметрический блок включает: делители напряжения 1, аналого-цифровую преобразующую схему 2, единую схему 3 электронного мультиплексирования, модулятор 4 и оптический излучатель 5, связанный оптической линией 6 связи с оптическим ресивером 7. Система III сбора, обработки и передачи информации содержит: блок 8 сбора, обработки и передачи информации, N-канальный блок 9 вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока 8, блок 10 определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока 9 вычисления вертикальной компоненты вектора интенсивности, N-канальный блок 11 вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока 8 сбора, обработки и отображения информации, N-канальный блок 12 вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности, блок 13 вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока 12 вычисления азимутального угла, а второй вход соединен со вторым выходом N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности. Информация с выхода блока 13 вычисления усредненного азимутального угла и блока 10 определения максимума вертикальной компоненты вектора интенсивности поступает на первый и второй входы устройства 14 доступа к цифровым сетям передачи данных. Для решения проблемы обнаружения источника звука в систему III сбора, обработки и передачи информации включены сумматор 15, вход которого соединен с выходом N-канального блока 9 вычисления вертикальной компоненты вектора интенсивности, анализатор 16 спектра комплексной огибающей, вход которого соединен с выходом сумматора 15, вычислитель 17 максимума спектра комплексной огибающей, вход которого соединен с выходом анализатора 16 спектра комплексной огибающей, а выход соединен с третьим входом устройства 14 доступа к цифровым сетям передачи данных.
Кроме того, для повышения помехоустойчивости системы, увеличения вероятности правильного обнаружения и увеличения дальности обнаружения в систему III сбора, обработки и передачи информации включена N-канальная подсистема IV обнаружения источника звука по горизонтальному потоку мощности.
Эта подсистема содержит N-канальный блок 18 вычисления компонент вектора колебательной скорости в повернутой системе координат, вход которого соединен с выходом блока 8 сбора, обработки и передачи информации; N-канальный блок 19 вычисления компонент вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока 18 вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока 8 сбора, обработки и передачи информации; N-канальный блок 20 квадратичных детекторов компонент вектора колебательной скорости, первый вход которого соединен с выходом блока 18 вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока 8 сбора, обработки и передачи информации; N-канальный блок 21 усреднения изотропной помехи, первый вход которого соединен с выходом блока 19 вычисления компонент вектора интенсивности в повернутой системе координат, а второй вход соединен с выходом блока 11 вычисления горизонтальных компонент вектора интенсивности; N-канальный блок 22 формирования направленности по горизонтальному потоку мощности, первый вход которого соединен с выходом блока 21 усреднения изотропной помехи, а второй вход соединен с выходом блока 20 квадратичных детекторов компонент вектора колебательной скорости, N-канальный блок 23 усреднения тыльного потока мощности, вход которого соединен с выходом блока 22 формирования направленности по горизонтальному потоку мощности, N-канальный блок 24 квадратичных детекторов потока мощности, вход которого соединен с выходом блока 23 усреднения тыльного потока мощности, N-канальный блок 25 интеграторов, вход которого соединен с выходом блока 24 квадратичных детекторов потока мощности, а выход соединен со входом устройства 14 доступа к цифровым сетям передачи данных, а в качестве признака обнаружения движущегося источника звука принимается степень превышения уровня сигнала на выходе интегратора, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем фоновой шумовой помехи.
Гидроакустический комплекс работает следующим образом.
Звуковая волна, излучаемая источником звука, принимается акустическими комбинированными приемниками, образующими донную вертикально ориентированную эквидистантную антенну I. Все сигналы с выходов акустических приемников поступают на вход телеметрического блока II, а после прохождения через делители напряжения 1, аналого-цифровую преобразующую схему 2 и единую схему 3 электронного мультиплексирования преобразуются в поток цифровой информации, поступающий через модулятор 4, оптический излучатель 5 и оптическую линию 6 связи на оптический ресивер 7. С выхода оптического ресивера 7 информация поступает в цифровом виде на вход блока 8 сбора, обработки и отображения информации, находящегося в системе III сбора, обработки и отображения информации. В блоке 8 сбора, обработки и отображения информации сигналы вновь разделяются по отдельным каналам звукового давления и компонент вектора колебательной скорости и после применения быстрого преобразования Фурье (БПФ) поступают в виде соответствующих спектральных плотностей p(ω,r(t)),
vz(ω,r(t)), νx(ω,r(t)), νy(ω,r(t)) в соответствующие блоки для последующей обработки.
С первого выхода блока 8 сигналы поступают в N-канальный блок 9 вычисления вертикальной компоненты вектора интенсивности Iz(ω,r(t))=Re p(ω,r(t))vz*(ω,r(t)) для каждого из N акустических комбинированных приемников с последующим нахождением максимального из этих значений в блоке 10. За горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимальное значение вертикальной компоненты вектора интенсивности, а соответствующая информация поступает на первый вход устройства 14 доступа к цифровым сетям передачи данных. Та же сигнальная информация с выхода блока 8 сбора, обработки и отображения информации поступает на вход N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности, с первого выхода которого численные значения горизонтальных компонент вектора интенсивности Ix(ω,r(t)), Iy(ω,r(t)) поступают на вход N-канального блока 12 вычисления азимутального угла. Численные оценки азимутального угла на источник звука, вычисленные по формуле (1) для каждого из N акустических комбинированных приемников, усредняются в блоке 13 по формуле (3), а усредненные значения азимутального угла передаются на второй вход устройства 14 доступа к цифровым сетям передачи данных.
Кроме того, сигналы с выхода блока 9 вычисления вертикальной компоненты вектора интенсивности подаются на вход сумматора 15, с выхода которого суммарный сигнал вертикальной компоненты вектора интенсивности поступает на вход анализатора 16 спектра комплексной огибающей, выполняющего вторичную спектральную обработку комплексной огибающей сигнала вертикальной компоненты вектора интенсивности.
С выхода анализатора 16 спектра комплексной огибающей сигнал поступает на вход вычислителя 17 максимума спектра комплексной огибающей, выход которого соединен с третьим входом устройства 14 доступа к цифровым сетям передачи данных. В качестве критерия обнаружения движущегося источника звука берется обычно степень превышение максимума спектральной плотности комплексной огибающей вертикальной компоненты вектора интенсивности по отношению к уровню спектральной плотности фоновой шумовой помехи. Сама степень превышения обычно измеряется в децибелах и называется порогом обнаружения, который предварительно задается оператором.
Кроме того, сигналы с выхода блока 8 поступают на вход N-канальной подсистемы IV обнаружения источника звука по горизонтальному потоку мощности. В этой подсистеме с использованием аддитивно - мультипликативных алгоритмов обработки формируются 8 пространственных каналов типа статического веера характеристик направленности. Это позволяет организовать в каждом пространственном канале однонаправленный прием с повышенным по сравнению с прототипом коэффициентом концентрации и, соответственно, с повышенной помехоустойчивостью приемной системы в режиме обнаружения. Характеристики направленности отдельного комбинированного приемника поясняются фиг 3 для угла поворота ϕ0=45°. Ширина характеристики направленности в каждом пространственном канале составляет 70°, а восемь пространственных каналов позволяют перекрыть весь диапазон изменения азимутального угла.
С этой целью сигналы с выхода блока 8 поступают на вход блока 18 вычисления компонент вектора колебательной скорости в повернутой системе координат и далее в N-канальный блок 19 вычисления компонент вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока 18 вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока 8 сбора, обработки и передачи информации. С другого выхода блока 8 сигналы поступают в N-канальный блок 20 квадратичных детекторов компонент вектора колебательной скорости, первый вход которого соединен с выходом блока 18 вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока 8 сбора, обработки и передачи информации. Сигналы с блоков 11, 19 поступают в N-канальный блок 21 усреднения изотропной помехи. С выхода этого блока сигналы поступают на первый вход N-канальный блока 22 формирования направленности по горизонтальному потоку мощности, на второй вход которого поступают сигналы с выхода блока 20 квадратичных детекторов компонент вектора колебательной скорости. Сигналы с выхода блока 22 формирования направленности по горизонтальному потоку мощности поступают на вход N-канального блока 23 усреднения тыльного потока мощности.
Далее сигналы поступают в N-канальный блок 24 квадратичных детекторов потока мощности, вход которого соединен с выходом блока 23 усреднения тыльного потока мощности. Квадратичное детектирование позволяет уменьшить влияние боковых лепестков характеристики направленности и устранить знакопеременные составляющие выходных сигналов. После детектирования сигналы поступают в N-канальный блок 25 интеграторов, вход которого соединен с выходом блока 24 квадратичных детекторов потока мощности, а выход соединен со входом устройства 14 доступа к цифровым сетям передачи данных, а в качестве признака обнаружения движущегося источника звука принимается степень превышения уровня сигнала на выходе интегратора, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем фоновой шумовой помехи.
Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника в мелком море в пассивном режиме с помощью акустических приемников, установленных на морском дне, координаты которых и угловое положение считаются известными. Технический результат - дополнительное увеличение помехоустойчивости элементарного комбинированного приемника и всего комплекса в целом, а также увеличение дальности действия. Для достижения указанной цели в гидроакустический комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/ Δz (где Н - глубина моря), каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации и устройство доступа к цифровым сетям передачи данных, N-канальный блок вычисления вертикальной компоненты вектора интенсивности, блок определения максимума вертикальной компоненты вектора интенсивности, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, N-канальный блок вычисления азимутального угла, блок вычисления усредненного азимутального угла, сумматор, анализатора спектра комплексной огибающей, вычислитель максимума спектра комплексной огибающей, дополнительно введена N-канальная подсистема обнаружения источника звука по горизонтальному потоку мощности. Это позволяет увеличить помехоустойчивость измерительного комплекса в режиме обнаружения на 3-4 дБ в сравнении с прототипом. Дополнительное увеличение помехоустойчивости до 10 дБ в сравнении с прототипом дает реализация процедуры усреднения изотропной помехи в каналах измерения горизонтальных потоков мощности. С увеличением помехоустойчивости измерительного комплекса увеличивается и его дальность обнаружения. 3 ил.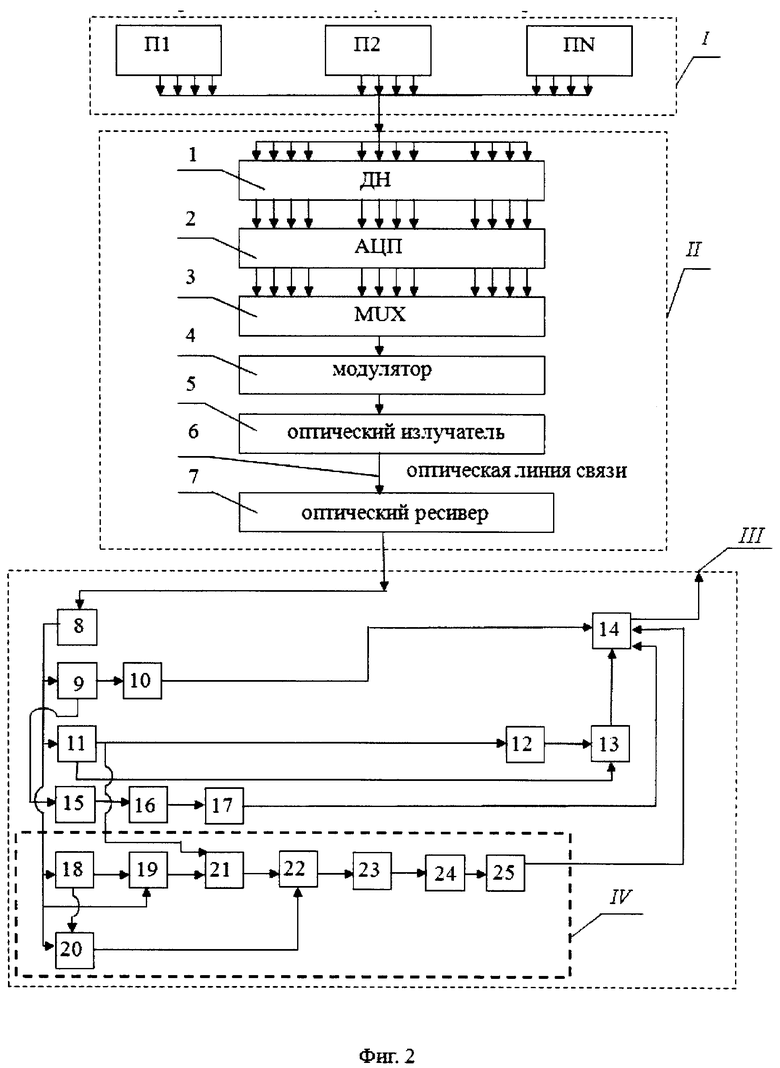
Гидроакустический измерительный комплекс, содержащий N акустических комбинированных приемников, образующих донную вертикально ориентированную эквидистантную антенну, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников N=H/Δz (где H - глубина моря), каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, причем в блок сбора, обработки и передачи информации введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутального угла, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненного азимутального угла, первый вход которого соединен с выходом N-канального блока вычисления азимутального угла, второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, а выход соединен со вторым входом устройства доступа к цифровым сетям передачи данных, сумматор, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, анализатор спектра комплексной огибающей, вход которого соединен с выходом сумматора, вычислитель максимума спектра комплексной огибающей, вход которого соединен с выходом анализатора спектра комплексной огибающей, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных, причем усредненный азимутальный угол определяется формулой

где ϕn, Ixn, Iyn - азимутальный угол и горизонтальные компоненты вектора интенсивности, относящиеся к n-y акустическому комбинированному приемнику, за горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности, а в качестве признака обнаружения движущегося источника звука принимается степень превышения максимума спектра комплексной огибающей вертикальной компоненты вектора интенсивности, принимаемая в качестве предварительно определенного порога обнаружения, над уровнем спектральной плотности фоновой шумовой помехи, отличающийся тем, что в систему сбора, обработки и передачи информации введена N-канальная подсистема обнаружения по горизонтальному потоку мощности, содержащая N-канальный блок вычисления компонент вектора колебательной скорости в повернутой системе координат, вход которого соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок вычисления компонент вектора интенсивности в повернутой системе координат, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок квадратичных детекторов компонент вектора колебательной скорости, первый вход которого соединен с выходом блока вычисления компонент вектора колебательной скорости в повернутой системе координат, а второй вход соединен с выходом блока сбора, обработки и передачи информации; N-канальный блок усреднения изотропной помехи, первый вход которого соединен с выходом блока вычисления горизонтальных компонент вектора интенсивности, а второй вход соединен с выходом блока вычисления компонент вектора интенсивности в повернутой системе координат, N-канальный блок формирования направленности по горизонтальному потоку мощности, первый вход которого соединен с выходом блока усреднения изотропной помехи, а второй вход соединен с выходом блока квадратичных детекторов компонент вектора колебательной скорости, N-канальный блок усреднения тыльного потока мощности, вход которого соединен с выходом блока формирования направленности по горизонтальному потоку мощности, N-канальный блок квадратичных детекторов потока мощности, вход которого соединен с выходом блока усреднения тыльного потока мощности, N-канальный блок интеграторов, вход которого соединен с выходом блока квадратичных детекторов потока мощности, а выход соединен со входом устройства доступа к цифровым сетям передачи данных, а в качестве признака обнаружения движущегося источника звука принимается степень превышения уровня сигнала на выходе интегратора, принимаемая в качестве предварительно определенного порога обнаружения, над предварительно определенным уровнем фоновой шумовой помехи.
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ЗВУКА, ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА НА ИСТОЧНИК И ГОРИЗОНТА ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2488133C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА НА ИСТОЧНИК ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2474836C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ЗАГЛУБЛЕННОГО ИСТОЧНИКА ЗВУКА И ИЗМЕРЕНИЯ ЕГО КООРДИНАТ В МЕЛКОМ МОРЕ | 2013 |
|
RU2537472C1 |
| US 8620082 B1, 31.12.2013 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |

