Изобретение относится к сельскохозяйственному машиностроению, в частности к комплексам для борьбы с сорной растительностью.
Известен способ авиационной химической обработки растений (А.С. СССР N 1017218, МПК A01G 7/00, 1983), согласно которому перед распылителем химикатов измеряют спектральную яркость растительного покрова, подлежащего обработке, и расход химикатов регулируют пропорционально спектральной яркости растительного покрова, подлежащего обработке.
Недостатком известного способа является то, что спектральную яркость растительного покрова определяют при условии, что в поле зрения фотометра попадает растительный покров, подлежащий обработке, размером не менее рабочей ширины захвата летательных аппаратов (30-35 м). В результате в поле зрения фотометра попадают растения с разной степенью развития, видимую дозу химикатов получают и слабо развитые, и хорошо развитые растения, что приводит к нерациональному использованию химикатов, и следственно, происходит загрязнение окружающей среды.
Известно устройство управляемой борьбы с сорняками (А.С. РФ N 2129785, МПК A01M 7/00, 1999), заключающееся в автоматическом управлении подачей гербицида на сорняки. При движении устройства в поле зрения цветной видеокамеры находятся все распылители опрыскивателя. Когда на участке поля, обрабатываемом одним распылителем, видеокамера видит зеленый цвет сорняка, анализатор изображения выдает команду на включение соответствующего распылителя через электроклапан.
Недостатком известного устройства является отсутствие возможности точечного внесения гербицида, а следственно, больший расход последнего, загрязнению окружающей среды и возделываемых культур.
Известны способ и устройство (патент Германии N 4132637, МПК A01M 7/00, 1993, прототип) подачи гербицидов в зависимости от количества сорняков, регулируемых оптически с обработкой результатов при помощи ЭВМ. Способ реализуется устройством, содержащим емкость с гербицидом, насос, цветную видеокамеру и командный блок. Имеются емкостью для гербицидов, приспособления для их подачи, распылители. Однако в известных способе и устройстве расход гербицидов зависит от суммарного количества сорняков, попавших в поле зрения оптического датчика.
Недостатком известного устройства является то, что при этом не учитывается индивидуальное местонахождение сорняков на опрыскиваемой площади, вследствие чего увеличивается расход гербицидов, а также загрязнению окружающей среды и возделываемых культур.
Технической задачей изобретения является повышение качества обработки почвы, снижение расхода гербицидов и негативного влияния на окружающую среду.
Технический результат достигается тем, что автономный комплекс для точечной борьбы с сорной растительностью, согласно изобретению, содержит каркас с тремя горизонтальными и одной 4 вертикальной направляющими и установленной на них кареткой, соединенной с блоком управления и приводимой в движение четырьмя шаговыми двигателями, в нижней части каретки установлены цветная видеокамера и рабочий орган, расположенный в корпусе и содержащий двигатель, соединенный с малой шестерней, которая соединена с большой шестерней и в центре которой размещен бур с насадкой для удаления сорной растительности со сквозным каналом, проводящим гербициды, при этом рабочий орган через насос соединен с емкостью для гербицида.
Изобретение поясняется чертежами.
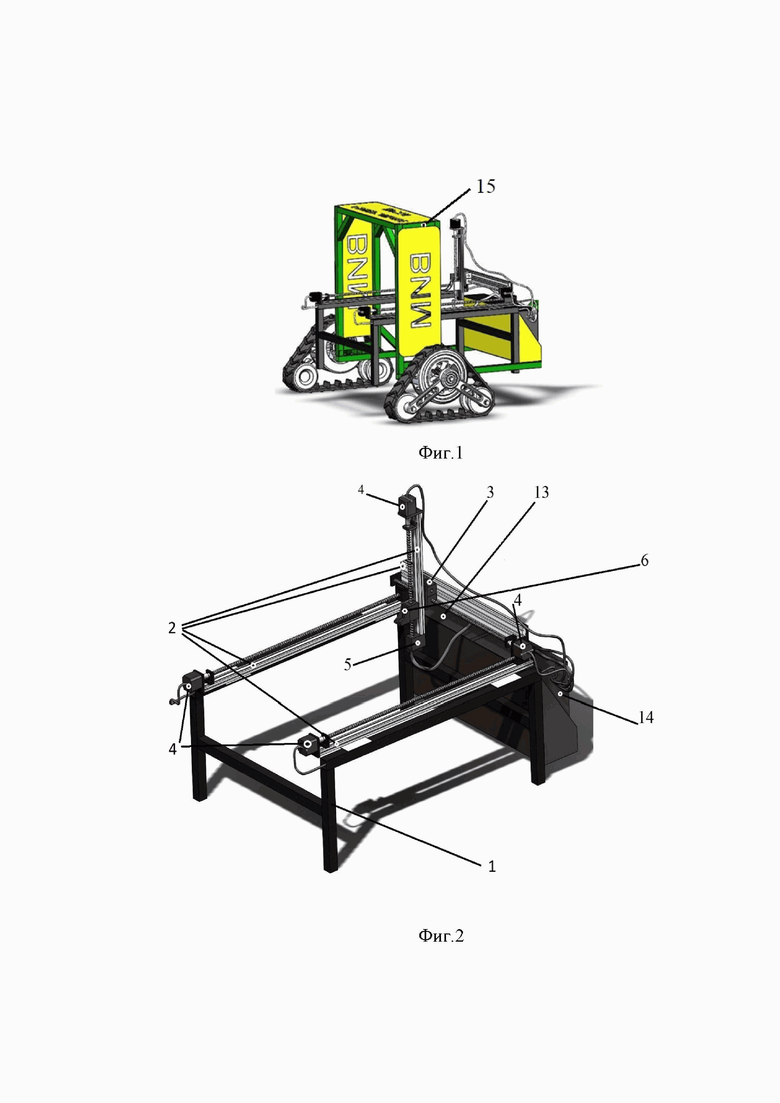
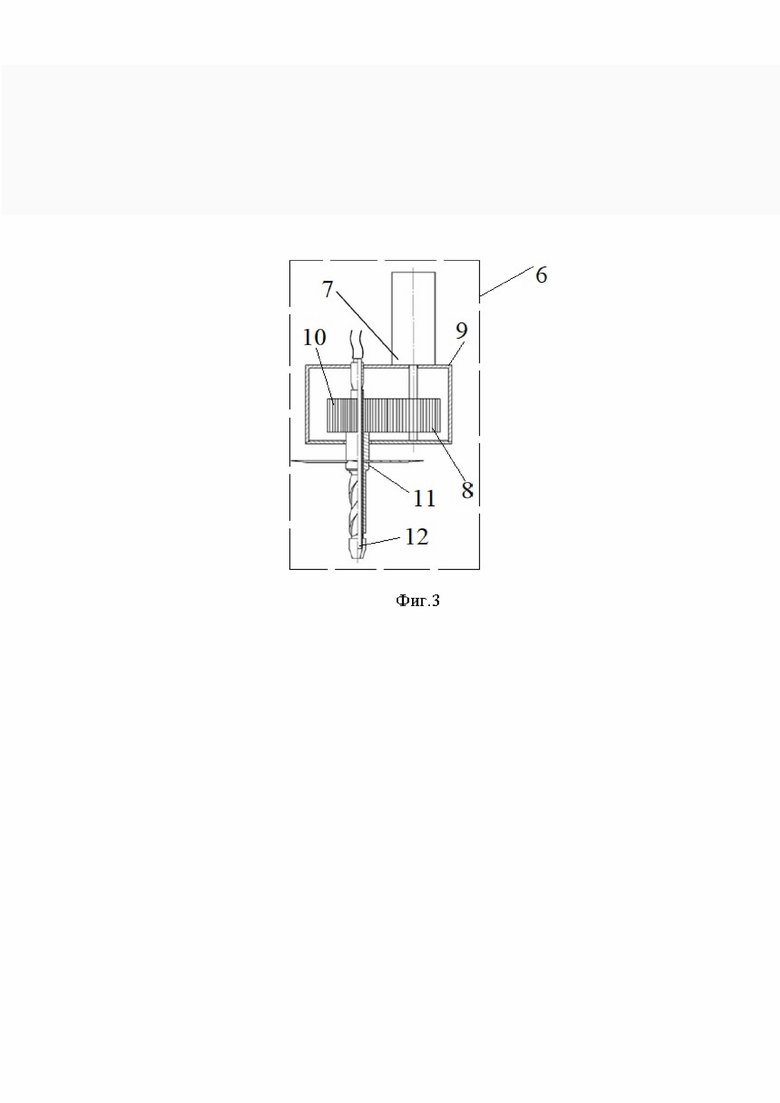
На фиг. 1 изображен автономный комплекс контроля сорной растительности - общий вид; на фиг. 2 изображена рама автономного комплекса с основными компонентами; на фиг. 3 изображен рабочий орган автономного комплекса.
Автономный комплекс для точечной борьбы с сорной растительностью состоит из каркаса 1 с тремя горизонтальными и одной вертикальной направляющими 2 и установленной на них кареткой 3, приводимой в движение четырьмя шаговыми двигателями 4, обеспечивающими ее трехмерное перемещение в рамках ограниченного объема и расположенными на каждой из направляющих 2. В нижней части каретки 3 установлены видеокамера 5 (не показана) и рабочий орган 6, включающий систему одновременного механического и химического удаления сорной растительности.
Рабочий орган 6 включает двигатель 7, соединенный с малой шестерней 8, расположенной в корпусе 9. В центре большой шестерни 10, связанной с малой шестерней 9, размещен бур 11 со сквозным каналом 12 проводящим ядохимикаты.
Рабочий орган 6 подключен к емкости 13 с гербицидом через насос (не показан). За пределами рабочей области расположены блок управления 14 и электронно-вычислительная машина (не показана) со специализированным программным обеспечением (ПО) для анализа изображений.
Автономный комплекс контроля сорной растительности работает следующим образом.
Перед началом работы каркас 1 с автономным комплексом устанавливают на самоходном агрегате 15.
Робот получает карту и координаты начала работ. ПО рассчитывает оптимальную траекторию движения для полного прохода поля. Используя ЭВМ 14, робот обнаруживает все растения на своем пути с помощью базы известных растений, предварительно загруженных в систему. Для этого он камерой 5 в режиме реального времени делает снимки почвы, пропуская через видео поток, которые в дальнейшем обрабатываются алгоритмом на основе OpenCV. На выходе комплекс получает информацию, о том какая растительность является вредоносной и где она расположена.
Первым этапом обработки почвы является механическое удаление сорной растительности с помощью специальной насадки на буре 11. Для этого по сигналу с блока управления 14 вступает в работу система позиционирования каретки 3, которая, перемещаясь по направляющим 2 в трехмерной системе координат, подводит бур 11 в заданную рабочую точку с сорным растением. Бур 11 погружается в почву и механическим путем удаляет его.
Вторым этапом является проводимый одновременно с первым этапом впрыск в почву дозированного количество гербицида, доза которого определяется в зависимости от количества сорняков на заданной площади.
Обе операции нацелены на центр растения, для получения максимального эффекта за счет близкого расположения к нему корневой системы.
Использование автономного комплекса для точечной борьбы с сорной растительностью обеспечит повышение качества обработки почвы, снижение расхода гербицидов и негативного влияния на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган автономного роботизированного комплекса для точечной борьбы с сорной растительностью | 2020 |
|
RU2730676C1 |
| Роботизированный комплекс для полосового опрыскивания овощных культур | 2023 |
|
RU2796491C1 |
| Способ точечной борьбы с сорной растительностью | 2020 |
|
RU2727831C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |
| Устройство роботизированного комплекса для полосового опрыскивания овощных культур | 2023 |
|
RU2822000C1 |
| Роботизированный комплекс для полосового опрыскивания овощных культур | 2023 |
|
RU2811688C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Устройство для комплексной обработки сельскохозяйственных культур | 2021 |
|
RU2769727C1 |
| Колесный агрегат для обработки сельскохозяйственных культур от болезней | 2022 |
|
RU2790981C1 |
| РАБОЧИЙ ОРГАН ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ И ГЕРБИЦИДОВ | 2004 |
|
RU2269885C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к комплексам для борьбы с сорной растительностью. Автономный комплекс для точечной борьбы с сорной растительностью содержит каркас с тремя горизонтальными и одной вертикальной направляющими и установленной на них кареткой, соединенной с блоком управления и приводимой в движение четырьмя шаговыми двигателями. В нижней части каретки установлены цветная видеокамера и рабочий орган, расположенный в корпусе. Рабочий орган содержит двигатель, соединенный с малой шестерней, которая соединена с большой шестерней и в центре которой размещен бур с насадкой для удаления сорной растительности со сквозным каналом, проводящим гербициды. Рабочий орган через насос соединен с емкостью для подачи гербицида. Предлагаемый автономный комплекс для точечной борьбы с сорной растительностью обеспечит повышение качества обработки почвы, снижение расхода гербицидов и негативного влияния на окружающую среду. 3 ил.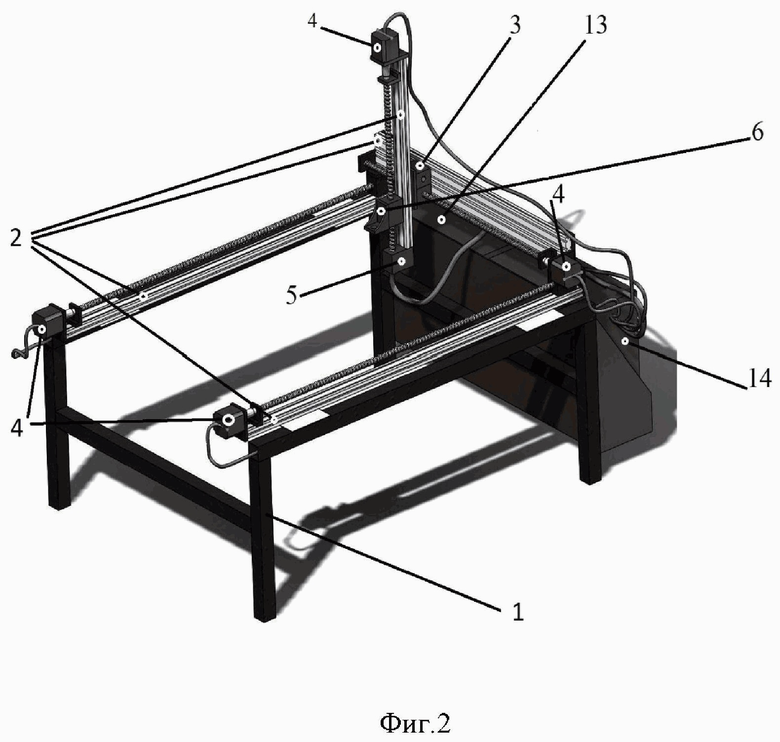
Автономный комплекс для точечной борьбы с сорной растительностью, характеризующийся тем, что содержит каркас с тремя горизонтальными и одной вертикальной направляющими и установленной на них кареткой, соединенной с блоком управления и приводимой в движение четырьмя шаговыми двигателями, в нижней части каретки установлены цветная видеокамера и рабочий орган, расположенный в корпусе и содержащий двигатель, соединенный с малой шестерней, которая соединена с большой шестерней и в центре которой размещен бур с насадкой для удаления сорной растительности со сквозным каналом, проводящим гербициды, при этом рабочий орган через насос соединен с емкостью для гербицида.
| DE 4132637 C2, 27.04.1995 | |||
| CN 111990388 A, 27.11.2020 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |

