Изобретение относится к сельскохозяйственному машиностроению, в частности к роботизированным комплексам для опрыскивания растений.
Известен способ авиационной химической обработки растений (А.С. СССР №1017218, МПК A01G 7/00, 1983), согласно которому перед распылителем химикатов измеряют спектральную яркость растительного покрова, подлежащего обработке, и расход химикатов регулируют пропорционально спектральной яркости растительного покрова, подлежащего обработке.
Недостатком известного способа является то, что спектральную яркость растительного покрова определяют при условии, что в поле зрения фотометра попадает растительный покров, подлежащий обработке, размером не менее рабочей ширины захвата летательных аппаратов (30-35 м). В результате в поле зрения фотометра попадают растения с разной степенью развития по ширине и длине обрабатываемой полосы, дозу химикатов пропорционально индекса вегетации учитывается только по длине обработки, что приводит к нерациональному использованию химикатов, и следственно, происходит загрязнение окружающей среды.
Известно устройство управляемого опрыскивания (А.С. РФ №2129785, МПК А01М 7/00, 1999), заключающееся в автоматическом управлении подачей рабочего раствора на культурное или сорное растения. При движении устройства в поле зрения цветной видеокамеры находятся все распылители опрыскивателя. Когда на участке поля, обрабатываемом одним распылителем, видеокамера видит зеленый цвет обрабатываемого растения, анализатор изображения выдает команду на включение соответствующего распылителя через электроклапан.
Недостатком известного устройства является отсутствие возможности точечного внесения рабочего раствора, а следственно, больший расход последнего, загрязнению окружающей среды и повышения себестоимости возделываемых культур.
Наиболее близким устройством является автономный комплекс для точечного опрыскивания растительности (патент РФ №2767537, МПК А01М 7/00, 2006), содержащий каркас с тремя горизонтальными направляющими и установленной на них кареткой, соединенной с блоком управления и приводимой в движение шаговыми двигателями, в нижней части каретки установлены цветная видеокамера и корпус с распылителем, соединенный через насос с емкостью для рабочего раствора.
Недостатком известного устройства является цикличность работы, при этом не учитываются индивидуальные геометрические параметры обрабатываемых растений на опрыскиваемой площади с учетом фазы развития, вследствие чего увеличивается расход рабочего раствора, загрязнение окружающей среды и себестоимость возделываемых культур.
Технической задачей изобретения является повышение качества обработки растений опрыскиванием, снижение гектарного расхода рабочего раствора и негативного влияния на окружающую среду.
Технический результат достигается тем, что роботизированный комплекс для полосового опрыскивания овощных культур, согласно изобретению, содержит раму, на которой смонтированы двигатель приводящий насос, соединенный на входе с емкостью для рабочего раствора, каркас с горизонтальной направляющей и установленной ней кареткой, соединенная с блоком управления и приводимой в движение шаговым двигателем, в нижней части каретки установлены видеокамера и корпус с распылителем соединенный подвижно с выходным штуцером насоса, при этом на горизонтальной направляющей установлены две каретки, на каждой подвижной каретке установлен корпус с распылителем, оси распылителей расположены в одной вертикальной плоскости и направлены навстречу друг к другу под углом обеспечивающий направление слияния верхнего края конуса распыла с образованием потока внутрь, при этом нижние края конуса распыла не выходят за абрис расположения распылителя над почвой, а видеокамера, обладающая техническим зрением, установлена впереди на раме по центру движения и определяет проекцию контура обрабатываемых растений в вертикально-поперечной плоскости передавая сигнал на блок управления задающий перемещение подвижных кареток обеспечивающее полное покрытие контура обрабатываемых растений рабочим раствором Изобретение поясняется чертежами.
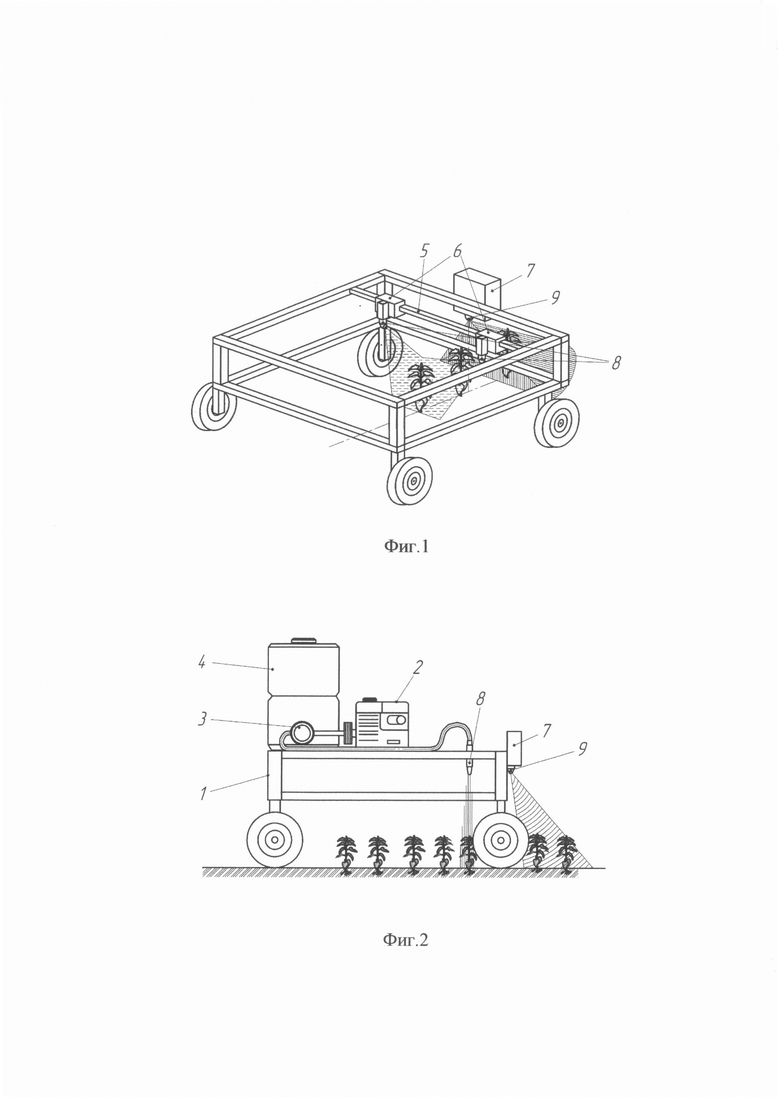
На фиг. 1 изображен роботизированный комплекс для полосового опрыскивания овощных культур, общий вид; на фиг. 2 изображен роботизированный комплекс для полосового опрыскивания овощных культур, вид с боку.
Роботизированный комплекс для полосового опрыскивания овощных культур состоит из рамы 1, на которой смонтированы двигатель 2 приводящий насос 3, соединенный на входе с емкостью 4 для рабочего раствора, горизонтальная направляющая 5 с двумя подвижными каретками 6, соединенной с блоком управления 7. Каретка 6 приводится в движение шаговым двигателем. В нижней части каретки 6 установлен корпус с распылителем 8, соединенный подвижно с выходным штуцером насоса 3. Оси распылителей 8 расположены в одной вертикальной плоскости и направлены навстречу друг к другу под углом, обеспечивающим направление слияния верхнего края конуса распыла с образованием потока внутрь, а нижние края конуса распыла не выходят за абрис расположения распылителя над почвой. Впереди на раме 1 по центру движения установлена видеокамера 9, обладающая техническим зрением. Видеокамера 9 определяет проекцию контура обрабатываемых растений в вертикально-поперечной плоскости и передает сигнал на блок управления 7. Блок управления 7 задает величину перемещения подвижных кареток 6 обеспечивающие полное покрытие контура обрабатываемых растений рабочим раствором через корпус с распылителем 8.
Работает роботизированный комплекс для полосового опрыскивания овощных культур следующим образом.
В соответствии с программой полосовой обработки сельскохозяйственного поля пестицидами или жидкими минеральными удобрениями роботизированный комплекс для полосового опрыскивания овощных культур устанавливают на край поля в точке ввода его в работу.
Роботизированный комплекс получает карту и координаты начала работ. ПО рассчитывает оптимальную траекторию движения по междурядьям растений для полного прохода поля. Используя видеокамеру 9, обладающая свойством технического зрения, в режиме реального времени, роботизированный комплекс обнаруживает все растения на своем пути. Получает информацию, о том какая растительность должна быть обработана и где она расположена. С помощью базы известных растений, предварительно загруженных в систему, определяет проекцию контура обрабатываемых растений в вертикально-поперечной плоскости и передает сигнал на блок управления 7. Блок управления 7, в режиме реального времени, задает величину перемещения подвижных кареток 6, в нижней части которых установлены корпуса с распылителями 8 соединенные подвижно с выходным штуцером насоса 3. Оси распылителей 8 расположены в одной вертикальной плоскости и направлены навстречу друг к другу под углом обеспечивающий направление слияния верхнего края конуса распыла с образованием потока внутрь, а нижние края конуса распыла не выходят за абрис расположения распылителя над почвой. Величина перемещения кареток 6 обеспечивает полное покрытие контура обрабатываемых растений рабочим раствором учитывая отклонение абриса растений от оси движения робота.
Дозирование количества пестицидов или жидких удобрений определяется в зависимости от величины абриса обрабатываемых растений на заданной площади.
Использование роботизированного комплекса для полосового опрыскивания овощных культур при обработке пестицидами или жидкими минеральными удобрениями обеспечит повышение качества обработки растений, снижение гектарного расхода рабочего раствора и негативного влияния на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный комплекс для полосового опрыскивания овощных культур | 2023 |
|
RU2811688C1 |
| Устройство роботизированного комплекса для полосового опрыскивания овощных культур | 2023 |
|
RU2822000C1 |
| Способ полосовой обработки овощных культур опрыскиванием | 2022 |
|
RU2785465C1 |
| Мобильное роботизированное шасси для надреза мульчирующей пленки над растением с последующей ее фиксацией | 2022 |
|
RU2785580C1 |
| Способ бокового опрыскивания овощных культур | 2023 |
|
RU2817070C1 |
| Способ полосовой химической обработки растений | 2019 |
|
RU2709762C1 |
| Способ полосовой химической обработки пропашных культур | 2021 |
|
RU2769737C1 |
| Мобильный робот для побелки стволов деревьев | 2022 |
|
RU2795158C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Робот-пропольщик | 2019 |
|
RU2703092C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к роботизированным комплексам для опрыскивания растений. Роботизированный комплекс содержит раму, на которой смонтированы двигатель приводящий насос, соединенный на входе с емкостью для рабочего раствора, каркас с горизонтальной направляющей и установленной на ней подвижной каретки, соединенной с блоком управления и приводимой в движение шаговым двигателем, в нижней части каретки установлены видеокамера и корпус с распылителем, соединенный подвижно с выходным штуцером насоса. На горизонтальной направляющей установлены две подвижные каретки, на каждой подвижной каретке установлен корпус с распылителем, оси распылителей расположены в одной вертикальной плоскости и направлены навстречу друг к другу под углом, обеспечивающим направление слияния верхнего края конуса распыла с образованием потока внутрь. Нижние края конуса распыла не выходят за абрис расположения распылителя над почвой, а видеокамера, обладающая техническим зрением, установлена впереди на раме по центру движения и определяет проекцию контура обрабатываемых растений в вертикально-поперечной плоскости и передает сигнал блоку управления, определяющему перемещение подвижных кареток, обеспечивающее полное покрытие контура обрабатываемых растений. Обеспечивается повышение качества обработки растений, снижение гектарного расхода рабочего раствора и негативного влияния на окружающую среду. 2 ил.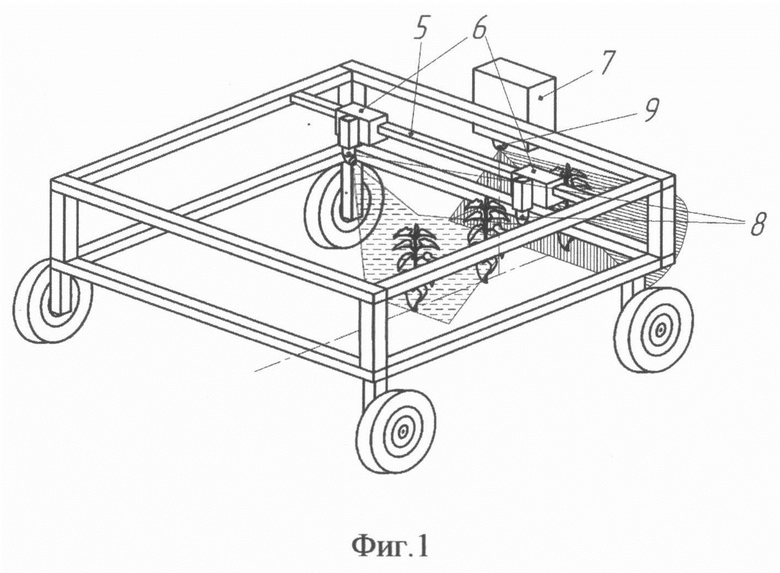
Роботизированный комплекс для полосового опрыскивания овощных культур, содержащий раму, на которой смонтированы двигатель приводящий насос, соединенный на входе с емкостью для рабочего раствора, каркас с горизонтальной направляющей и установленной на ней подвижной кареткой, соединенной с блоком управления и приводимой в движение шаговым двигателем, в нижней части каретки установлены видеокамера и корпус с распылителем, соединенный подвижно с выходным штуцером насоса, отличающийся тем, что на горизонтальной направляющей установлены две подвижные каретки, на каждой подвижной каретке установлен корпус с распылителем, оси распылителей расположены в одной вертикальной плоскости и направлены навстречу друг к другу под углом, обеспечивающим направление слияния верхнего края конуса распыла с образованием потока внутрь, при этом нижние края конуса распыла не выходят за абрис расположения распылителя над почвой, а видеокамера, обладающая техническим зрением, установлена впереди на раме по центру движения и определяет проекцию контура обрабатываемых растений в вертикально-поперечной плоскости и передает сигнал блоку управления, определяющему перемещение подвижных кареток, обеспечивающее полное покрытие контура обрабатываемых растений.
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| САМОХОДНЫЙ РОБОТ-ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ РАСТЕНИЙ ЗЕМЛЯНИКИ И ДРУГИХ НИЗКОРАСТУЩИХ КУЛЬТУР | 2015 |
|
RU2592904C1 |
| DE 4132637 C2, 27.04.1995 | |||
| CN 205233273 U, 18.05.2016 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |

