ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к области медицины и вычислительной техники, в частности к программно-аппаратному комплексу и способу для бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно решение, выбранное в качестве наиболее близкого аналога, RU 152606 U1, опубл. 10.06.2015. В данном решении раскрыто стабилометрическое устройство, содержащее опорную платформу, четыре тензодатчика, жестко закрепленных одной из своих нагружаемых областей на внутренней поверхности опорной платформы, схему обработки сигналов, выполненную в виде микропроцессорного модуля, содержащего четыре синхронизированных аналогово-цифровых преобразователя, воспринимающих измерительные сигналы от каждого из тензодатчиков, нормирующих и преобразующих измерительные сигналы в информационный сигнал, содержащий данные о массе исследуемого объекта и координатах его центра давления на платформу относительно системы координат, связанной с платформой, с последующей передачей полученного информационного сигнала через последовательный интерфейс типа Universal Serial Bus в управляющий компьютер, отличающееся тем, опорная платформа выполнена в виде раздвижной рамной конструкции, оснащенной приемными площадками для установки опорных ножек кровати пациента и устройствами регулировки расстояния между приемными площадками.
Приведенное выше известное из уровня техники решение направлено на решение проблемы проведения биомедицинских и психофизиологических исследований с использованием стабилометрии.
Предлагаемое техническое решение направлено на устранение недостатков современного уровня техники и отличается от известных ранее тем, что предложенное техническое решение обеспечивает бесконтактное, высокоскоростное и точное вычисления положения центра тяжести человека в трехмерном пространстве.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической проблемой, на решение которой направлено заявленное решение, является создание программно-аппаратного комплекса для бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве. Дополнительные варианты реализации настоящего изобретения представлены в зависимых пунктах изобретения.
Технический результат заключается в осуществлении бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве.
Заявленный результат достигается за счет осуществления программно-аппаратного комплекса для бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве, содержащего:
вычислительное устройство, соединенное с бесконтактным сенсором, выполненным с возможностью получения трехмерных координат характерных точек тела человека, находящегося в поле зрения сенсора;
модуль взаимодействия с бесконтактным сенсором, выполненный с возможностью получения первичных данных от бесконтактного сенсора и предварительной обработки полученных данных для последующей их передачи в модуль стабилометрических расчетов;
модуль стабилометрических расчетов, выполненный с возможностью расчета положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени;
модуль анализа данных, выполненный с возможностью анализа и вычисления результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов.
В частном варианте реализации описываемого программно-аппаратного комплекса, модуль взаимодействия с бесконтактным сенсором выполнен с возможностью:
автоматической калибровки положения оптической оси сенсора и преобразования получаемых точек координат из системы координат, связанной с положением сенсора в независимую гравитационную систему координат для обеспечения независимости значений, получаемых первичных данных от физического расположения сенсора;
фильтрации и сглаживания первичных данных для увеличения точности последующих расчетов;
записи первичных данных для последующей эмуляции работы сенсора с возможностью постобработки из выбранного набора записей;
отправки предварительно обработанных первичных данных на вычислительное устройство.
В частном варианте реализации описываемого программно-аппаратного комплекса, модуль взаимодействия с бесконтактным сенсором имеет возможность осуществлять отправку предварительно обработанных первичных данных на вычислительное устройство, располагающееся в пределах локальной сети и имеющее возможность приема и обработки первичных данных.
В частном варианте реализации описываемого программно-аппаратного комплекса, модуль стабилометрических расчетов выполнен с возможностью:
построения трехмерной модели сегментов тела человека по данным, полученным от модуля взаимодействия с сенсором;
вычисления текущего положения центра тяжести человека в трехмерном пространстве на основании модели сегментов тела.
В частном варианте реализации описываемого программно-аппаратного комплекса, модуль анализа данных выполнен с возможностью:
вычисления сводных и медицинских характеристик положения и скорости изменения положения центра тяжести;
построения временных последовательностей координат положения и скорости изменения положения центра тяжести;
построения амплитудно-частотных характеристик координат положения и скорости изменения положения центра тяжести;
построения статистических интервальных распределений координат положения и скорости изменения положения центра тяжести, в том числе и в полярном представлении.
В частном варианте реализации описываемого программно-аппаратного комплекса, вычислительное устройство осуществляет связь с бесконтактным сенсором по USB-интерфейсу.
Заявленный технический результат также достигается за счет способа бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве, реализуемого программно-аппаратным комплексом по п. 1, и содержащим этапы, на которых:
посредством модуля взаимодействия с бесконтактным сенсором осуществляют получение первичных данных от бесконтактного сенсора и осуществляют предварительную обработку данных для последующей их передачи в модуль стабилометрических расчетов;
посредством модуля стабилометрических расчетов осуществляют расчет положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени;
посредством модуля анализа данных осуществляют анализ и вычисление результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов.
В частном варианте реализации описываемого способа посредством модуля взаимодействия с бесконтактным сенсором осуществляют:
автоматическую калибровку положения оптической оси сенсора и преобразование получаемых точек координат из системы координат, связанной с положением сенсора, в независимую гравитационную систему координат для обеспечения независимости значений, получаемых первичных данных от физического расположения сенсора;
фильтрацию и сглаживание первичных данных для увеличения точности последующих расчетов;
запись первичных данных для последующей эмуляции работы сенсора с возможностью постобработки из выбранного набора записей;
отправку предварительно обработанных первичных данных на вычислительное устройство.
В частном варианте реализации описываемого способа посредством модуля стабилометрических расчетов осуществляют:
построение трехмерной модели сегментов тела человека по данным, полученным от модуля взаимодействия с сенсором;
вычисление текущего положения центра тяжести человека в трехмерном пространстве на основании модели сегментов тела.
В частном варианте реализации описываемого способа посредством модуля анализа данных осуществляют:
вычисление сводных и медицинских характеристик положения и скорости изменения положения центра тяжести;
построение временных последовательностей координат положения и скорости изменения положения центра тяжести;
построение амплитудно-частотных характеристик координат положения и скорости изменения положения центра тяжести;
построение статистических интервальных распределений координат положения и скорости изменения положения центра тяжести, в том числе и в полярном представлении.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
Фиг. 1 иллюстрирует структурную схему технического решения.
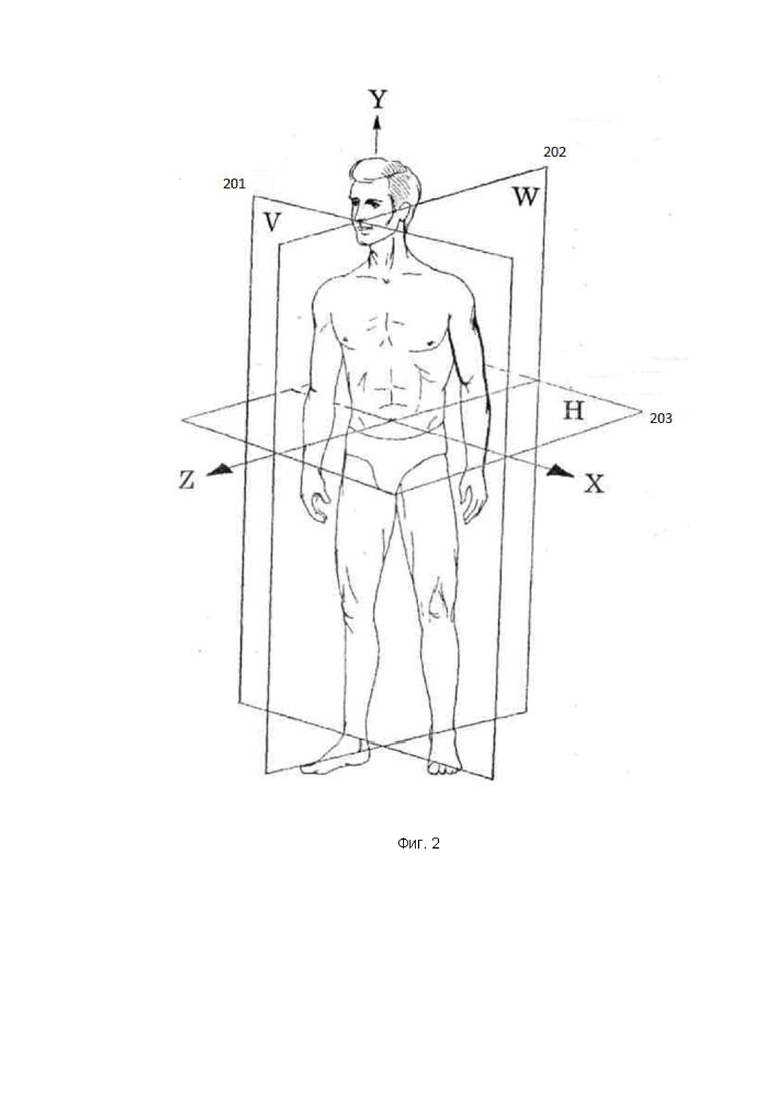
Фиг. 2 иллюстрирует плоскости в трехмерном пространстве.
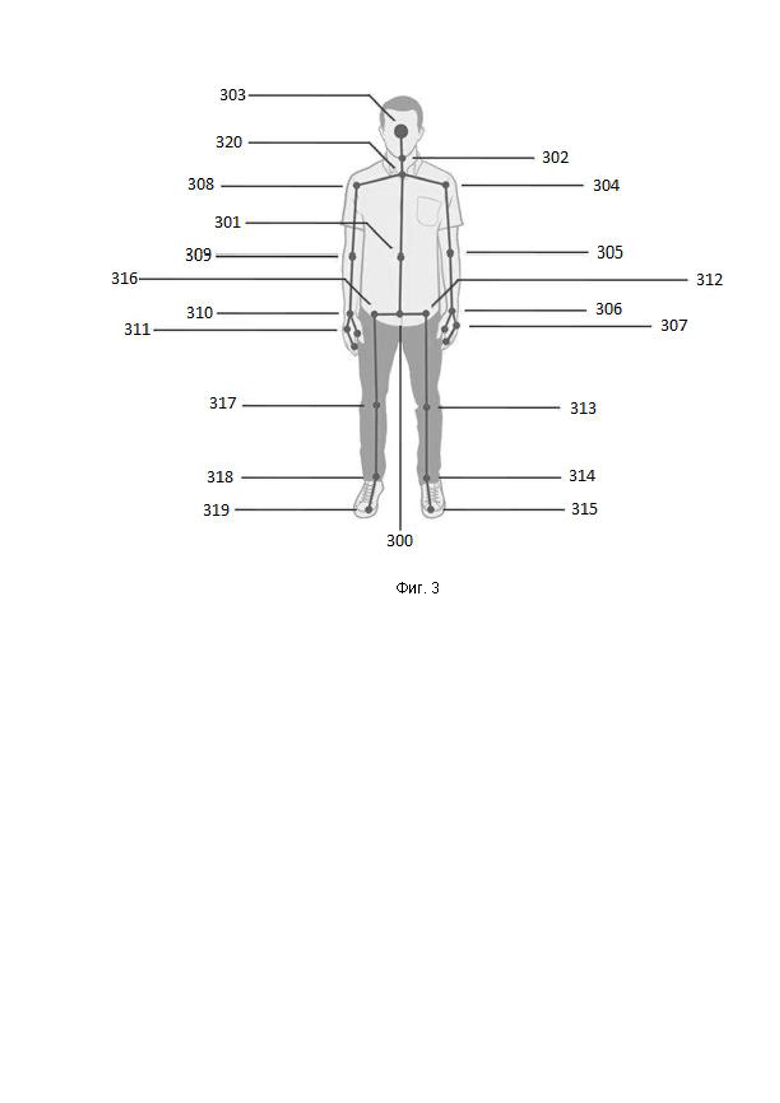
Фиг. 3 иллюстрирует характерные точки тела, используемые в расчетах.
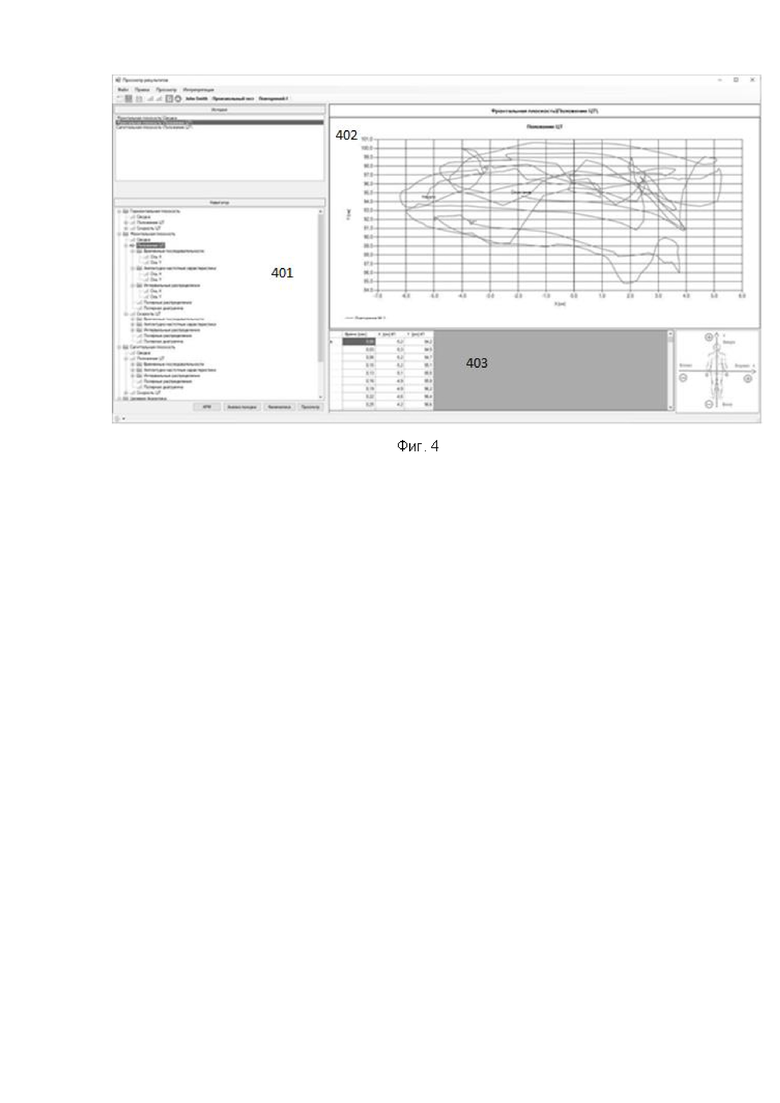
Фиг. 4 иллюстрирует пример полученных результатов анализа.
Фиг. 5 иллюстрирует систему координат бесконтактного сенсора.
Фиг. 6 иллюстрирует пример общей схемы вычислительного устройства.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Изобретение относится к области медицины и вычислительной техники, в частности, к задачам стабилометрического анализа, анализа биомеханики и кинематики движений, анализа походки человека.
Сферой применения предлагаемого технического решения является его использование в медицинской диагностике, реабилитации после травм, инсультов, при заболеваниях опорно-двигательного аппарата, спортивной медицине.
Ключевой первичной информацией для последующей обработки в рамках решения вышеуказанных задач являются данные о положении центра тяжести человека в процессе проведения замеров в реальном масштабе времени.
Известные из уровня техники технические решения используют традиционные существующие способы для вычисления положения центра тяжести человека (ЦТ), базирующиеся на использовании стабилометрических платформ (стабилоплатформ). Стабилоплатформа представляет собой неподвижную электромеханическую напольную платформу, снабженную датчиками измерения вертикально прилагаемой к ней силы для определения центра давления, создаваемого располагающимся на платформе человеком. Сигналы от тензометрических датчиков, измеряющих силы давления на опорную поверхность в разных точках, передаются на компьютер, где по этим данным выполняется расчет координат положения ЦТ в горизонтальной плоскости. Основными недостатками существующих решений являются следующие:
1) Необходимость нахождения человека для выполнения измерений на платформе, что не допускает вычисление положения ЦТ в процессе движения перемещающегося объекта (например, при анализе походки, бега, прыжков).
2) Невозможность или высокую погрешность вычисления положения ЦТ для объекта, выполняющего интенсивные физические упражнения из-за воздействия инерционных сил на опору.
3) Принципиальная невозможность определения положения ЦТ в трехмерном пространстве, так как методика вычислений по давлению на опору позволяет определить только проекции координат на горизонтальную плоскость.
Технической задачей настоящего изобретения является создание технического решения, которое позволило бы, с одной стороны, определять положение центра тяжести человека без необходимости его нахождения на каком-либо стационарном оборудовании (платформе), а, с другой стороны, определять положение центра тяжести человека не только для статического положения человека, но и для динамического, в том числе в процессе перемещения человека в пространстве (ходьба, бег, тренировки). Еще одним важным требованием для поставленной технической задачи является определение координат положения центра тяжести в трехмерном пространстве (в трех плоскостях, Фиг. 2).
Использование предлагаемого технического решения позволяет повысить эффективность, расширить доступность и упростить применение методик, основанных на анализе ЦТ, для следующих практических задач:
1. Медицинская диагностика.
2. Детальное исследование объема движений и баланса тела.
3. Физическая реабилитация.
4. Медицинская экспертиза (доказательная медицина).
5. Спортивная медицина.
6. Проведение научных исследований по кинематике и биомеханике человека.
Предлагаемое техническое решение представляет собой программно-аппаратный комплекс в следующем составе:
1. Вычислительное устройство;
2. Бесконтактный сенсор;
3. Модуль взаимодействия с сенсором;
4. Модуль стабилометрических расчетов;
5. Модуль анализа данных.
Вычислительное устройство.
Вычислительное устройство может быть соединено кабелем по интерфейсу USB с бесконтактным сенсором и содержать установленное программное обеспечение.
Бесконтактный сенсор.
Бесконтактный сенсор - это лазерно-оптическая система, состоящая из одной или нескольких камер различных параметров и лазерного активного приемника-передатчика.
Модуль взаимодействия с сенсором.
Основной задачей модуля является получение первичных данных от сенсора и их предварительная обработка для последующего использования в модуле стабилометрических расчетов. Для решения этой задачи модуль обеспечивает следующие процессы обработки данных:
1. Автоматическую калибровку положения оптической оси сенсора и преобразование получаемых координат точек из системы координат, связанной с положением сенсора, в независимую гравитационную систему координат для обеспечения независимости значений, получаемых первичных данных от физического расположения сенсора.
2. Фильтрацию и сглаживание первичных данных для увеличения точности последующих расчетов.
3. Режимы записи первичных данных с последующей эмуляцией работы сенсора для постобработки из выбранного набора записей.
4. Поставку предварительно обработанных первичных данных как получателям на том же компьютере, так и получателям на любом компьютере в пределах локальной сети.
Особенностями модуля являются реализация построения трехмерной модели тела человека в независимой системе координат в реальном масштабе времени и возможность внедрения его в системы сетевой распределенной обработки данных. Кроме того, получаемая модель тела человека может использоваться не только для решения задачи стабилометрического анализа, но и для других важных медицинских областей, таких как: биомеханика, кинематика движений, анализ походки и т.п.
Модуль стабилометрических расчетов.
Основной задачей модуля является расчет положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени. Для решения этой задачи модуль обеспечивает следующие процессы обработки данных:
1. Построение трехмерной модели сегментов тела человека по данным, полученным от модуля взаимодействия с сенсором;
2. Вычисление текущего положения центра тяжести человека в трехмерном пространстве, на основании модели сегментов тела;
Особенностью модуля является реализация методики вычисления положения центра тяжести человека в трехмерном пространстве по координатам характерных точек тела человека.
Модуль анализа данных.
Основной задачей модуля является анализ и вычисление результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов. Для решения данной задачи модуль обеспечивает следующие процессы обработки данных:
1. Вычисление сводных и специализированных медицинских характеристик положения и скорости изменения положения центра тяжести, включая экстремумы значений, средние значения, REC, RMS, С90.
2. Построение временных последовательностей координат положения и скорости изменения положения центра тяжести.
3. Построение амплитудно-частотных характеристик координат положения и скорости изменения положения центра тяжести.
4. Построение статистических интервальных распределений координат положения и скорости изменения положения центра тяжести, в том числе и в полярном представлении.
Особенностью модуля является расчет и получение вышеуказанных характеристик для каждой из трех плоскостей: горизонтальной, фронтальной и сагиттальной. Приведенные ранее аналоги выдают результаты только для горизонтальной плоскости, вследствие принципиально другой методики получения исходных данных.
Настоящее техническое решение сводится к применению бесконтактного сенсора для получения координат характерных точек тела человека с дальнейшей их обработкой вычислительными алгоритмами для получения конечных результатов.
Бесконтактный сенсор представляет собой устройство для получения трехмерных координат характерных точек тела человека (Фиг. 3), находящегося в поле зрения сенсора. Диапазон дальности до человека для оптимальной работы сенсора составляет от 1.5 до 6 метров. В процессе работы сенсор выдает значения трехмерных координат 20-ти характерных точек тела в реальном масштабе времени с частотой около 30 раз в секунду. Бесконтактный сенсор является устройством, содержащим в своей конструкции камеры, работающие в видимом оптическом и инфракрасном (ИК) диапазонах, активные ИК излучатели и микропроцессор обработки данных. При нахождении человека (Фиг. 1, поз. 101) в поле зрения сенсора (Фиг. 5, поз. 503), устройство определяет характерный контур фигуры человека с помощью камер и выполняет замеры трехмерных координат характерных точек тела (Фиг. 3) с помощью активных ИК излучателей. В результате сенсор выдает в реальном масштабе времени трехмерные координаты характерных точек тела в системе координат, связанных с оптической осью сенсора (Фиг. 5, поз. 502).
Такие характеристики позволяют решить поставленную техническую задачу для двигающегося человека и получать итоговые результаты в трехмерном пространстве. Таким образом, от сенсора принимаются трехмерные координаты каждой характерной точки в системе координат (СК), связанной с сенсором (Фиг. 5):

Учитывая то, что оптическая ось сенсора может не находиться в горизонтальной плоскости, требуется преобразование полученных координат в СК, где ось Y совпадает с гравитационной вертикалью. Угол наклона оптической оси вычисляется как:
где: z и у - соответствующие составляющие кватерниона плоскости пола, определенного сенсором. Используя полученный угол наклона, выполняется преобразование координат характерных точек тела в гравитационную СК:

Завершающим этапом обработки первичных данных от сенсора является преобразование координат характерных точек в локальную СК, связанную с человеком. За точку начала локальной СК принимается средняя точка между проекциями ступней на опорную поверхность (пол), при этом плоскость осей XY учитывает поворот тела человека относительно сенсора:

Где: х, у, z - координаты точки начала локальной СК в глобальной СК; β - угол поворота тела.
После обработки первичных данных выполняются основные вычисления и анализ полученных данных. Для расчета координат ЦТ человека строится модель сегментов тела в трехмерном пространстве, где координаты ЦТ каждого сегмента тела рассчитываются как:

где: индекс н - характерная точка тела, являющаяся началом сегмента тела; индекс к - характерная точка тела, являющаяся окончанием сегмента тела; r - безразмерное статистическое смещение (от 0 до 1) координат ЦТ сегмента, относительно его начала.
В модели используются 14 основных значимых сегментов, выделенных на теле человека. На основании полученной модели сегментов тела человека выполняется расчет координат ЦТ человека в трехмерном пространстве по формуле:
где: w - безразмерная статистическая доля (от 0 до 1) массы сегмента в общей массе тела человека.
Дополнительно, для кинематического и динамического анализа движения тела, выполняется расчет скоростей и ускорений характерных точек тела методом численного дифференцирования:


где: V - скорость характерной точки тела в момент времени t; А - ускорение характерной точки тела в момент времени t.
Вышеуказанные алгоритмы и методики использованы в техническом решении в виде реализации программно-аппаратного комплекса.
Поток данных с координатами характерных точек тела от сенсора (Фиг. 1, поз. 103) получает Модуль взаимодействия с сенсором (Фиг. 1, поз. 104). Так как получаемые координаты точек тела привязаны к системе координат сенсора (Фиг. 5), то прямое их использование в дальнейших расчетах может привести к значительным погрешностям в случаях, когда оптическая ось сенсора (Фиг. 5, поз. 502) не находится в гравитационной горизонтальной плоскости. Данную проблему можно решить, если при установке сенсора использовать дополнительные измерительные инструменты для его юстировки. Однако, такое решение не является оптимальным, так как усложняет процесс использования комплекса. В данном техническом решении применен более оптимальный способ - автоматическая программная юстировка. Программная юстировка использует данные о расположении плоскости пола, получаемых от сенсора и, с заданной периодичностью, вычисляет положение оптической оси сенсора (Фиг. 5, поз. 502) в гравитационной системе координат. На основании этих данных Модуль выполняет преобразование координат точек тела из системы координат сенсора в гравитационную систему координат. Для полученного набора координат Модуль применяет функции сглаживания и фильтрации данных для компенсации возможных погрешностей измерений сенсора. Модуль содержит три встроенных алгоритма сглаживания и фильтрации, использование которых задается в его настройках. Кроме реализации процессов получения и обработки данных от сенсора в реальном масштабе времени, Модуль содержит функции сохранения потоков первичных данных в хранилище (Фиг. 1, поз. 105) с возможностью полной эмуляции работы сенсора для пост-обработки данных. Модуль выполнен как отдельное приложение-сервис и реализует функцию поставки данных как для приложений-клиентов на том же компьютере, так и для приложений-клиентов в локальной сети по протоколу TCP/IP (Фиг. 1, поз. 106). Таким образом, Модуль взаимодействия с сенсором реализует формирование наборов координат точек тела в гравитационной системе координат со сглаженными значениями координат и последующую поставку наборов данных локальным и/или удаленным клиентам в реальном масштабе времени.
Поток данных (Фиг. 1, поз. 106) от Модуля взаимодействия с сенсором (Фиг. 1, поз. 104) получает Модуль стабилометрических расчетов (Фиг. 1, поз. 107). Ключевой методикой, реализованной в Модуле, является алгоритм расчета трехмерных координат текущего положения центра тяжести человека по текущим значениям координат характерных точек тела (Фиг. 3). Реализация алгоритма выполняет следующие последовательные действия:
1. Преобразование координат характерных точек тела в локальную систему координат модели тела человека;
2. Построение модели сегментов тела человека в локальной системе координат. Сегментами модели являются плечи, предплечья, ладони, бедра, голени, стопы и т.д;
3. Вычисление текущего положения центра тяжести на основании положений в пространстве сегментов тела и их среднестатистических долей в общем весе человека. В результате Модуль стабилометрических расчетов реализует расчет текущего положения центра тяжести в локальной трехмерной системе координат, связанной с человеком (Фиг. 2) в реальном масштабе времени.
Поток трехмерных координат положения центра тяжести (Фиг. 1, поз.108) от Модуля стабилометрических расчетов (Фиг. 1, поз.107) получает Модуль анализа данных (Фиг. 1, поз.109). Для анализа получаемых данных модуль применяет следующие методики:
1. Численное дифференцирование значений координат положения центра тяжести для получения скоростей смещения центра тяжести для каждой из трех пространственных координат.
2. Алгоритмы для вычисления сводных специализированных медицинских характеристик.
3. Алгоритмы преобразования Фурье для получения амплитудно-частотных характеристик и частотного анализа.
4. Алгоритмы статистического анализа для получения интервальных распределений.
Результирующие данные сгруппированы отдельно для каждой из трех плоскостей (Фиг. 2), которые содержат следующие данные, отдельно для положения и скорости центра тяжести:
1. Сводные данные;
2. Временные последовательности;
3. Амплитудно-частотные характеристики;
4. Интервальные распределения;
5. Полярные распределения.
В результате, Модуль анализа данных обеспечивает широкий набор данных по результатам анализа трехмерных координат положения и скорости изменения положения центра тяжести (Фиг. 4, поз.401), которые представлены как в графическом (Фиг. 4, поз.402), так и в табличном (Фиг. 4, поз.403) видах.
Для иллюстрации технического решения приведены фигуры чертежей.
На Фиг. 1 представлена структурная схема технического решения.
Позиции:
101. Пациент;
102. Бесконтактный сенсор;
103. Поток данных с координатами характерных точек тела;
104. Программный модуль взаимодействия с сенсором;
105. Хранилище первичных данных для пост-обработки;
106. Поток предварительно обработанных первичных данных;
107. Программный модуль стабилометрических расчетов;
108. Поток данных с координатами центра тяжести;
109. Программный модуль анализа данных;
110. Результаты анализа.
На Фиг. 2 далее представлены плоскости в трехмерном пространстве. Позиции:
201. Фронтальная плоскость;
202. Сагиттальная плоскость;
203. Горизонтальная плоскость;
На Фиг. 3 далее представлены характерные точки тела, используемые в ^счетах.
Позиции:
300. Центр таза;
301. Центр позвоночника;
302. Шея;
303. Голова;
304. Левое плечо;
305. Левый локоть;
306. Левое запястье;
307. Левая ладонь;
308. Правое плечо;
309. Правый локоть;
310. Правое запястье;
311. Правая ладонь;
312. Левое бедро;
313. Левое колено;
314. Левая лодыжка;
315. Левая ступня;
316. Правое бедро;
317. Правое колено;
318. Правая лодыжка;
319. Правая ступня;
320. Центр между ключицами.
На Фиг. 4 представлен пример полученных результатов анализа. Позиции:
401. Список для выбора расчетной характеристики (в примере выбрана стабилограмма центра тяжести для фронтальной плоскости);
402. Графическое представление значений результатов выбранной расчетной характеристики;
403. Табличное представление значений результатов выбранной расчетной характеристики.
На Фиг. 5 представлена система координат бесконтактного сенсора. Позиции:
501. Бесконтактный сенсор;
502. Оптическая ось сенсора;
503. Поле зрения сенсора.
На Фиг. 6 далее будет представлена общая схема вычислительного устройства (600), обеспечивающего обработку данных, необходимую для реализации заявленного решения.
В общем случае устройство (600) содержит такие компоненты, как: один или более процессоров (601), по меньшей мере одну память (602), средство хранения данных (603), интерфейсы ввода/вывода (604), средство В/В (605), средства сетевого взаимодействия (606).
Процессор (601) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (600) или функциональности одного или более его компонентов. Процессор (601) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (602).
Память (602), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал.
Средство хранения данных (603) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (603) позволяет выполнять долгосрочное хранение различного вида информации, например, вышеупомянутых файлов с наборами данных пользователей, базы данных, содержащих записи измеренных для каждого пользователя временных интервалов, идентификаторов пользователей и т.п.
Интерфейсы (604) представляют собой стандартные средства для подключения и работы с серверной частью, например, USB, RS232, RJ45, LPT, COM, HDMI, PS/2, Lightning, FireWire и т.п.
Выбор интерфейсов (604) зависит от конкретного исполнения устройства (600), которое может представлять собой персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п.
В качестве средств В/В данных (605) в любом воплощении системы, реализующей описываемый способ, должна использоваться клавиатура. Аппаратное исполнение клавиатуры может быть любым известным: это может быть как встроенная клавиатура, используемая на ноутбуке или нетбуке, так и обособленное устройство, подключенное к настольному компьютеру, серверу или иному компьютерному устройству. Подключение при этом может быть, как проводным, при котором соединительный кабель клавиатуры подключен к порту PS/2 или USB, расположенному на системном блоке настольного компьютера, так и беспроводным, при котором клавиатура осуществляет обмен данными по каналу беспроводной связи, например, радиоканалу, с базовой станцией, которая, в свою очередь, непосредственно подключена к системному блоку, например, к одному из USB-портов. Помимо клавиатуры, в составе средств В/В данных также может использоваться: джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
Средства сетевого взаимодействия (606) выбираются из устройства, обеспечивающего сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п.С помощью средств (605) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM.
Компоненты устройства (600) сопряжены посредством общей шины передачи данных (610).
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ИНФОРМАТИВНОСТИ СТАБИЛОМЕТРИЧЕСКОГО ИССЛЕДОВАНИЯ И АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2665957C2 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| Контактное устройство для измерения конфигурации и размеров объемного тела, система измерения конфигурации и размеров объемного тела, способ измерения конфигурации и размеров объемного тела | 2017 |
|
RU2663387C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО ВЫБОРА ОДЕЖДЫ | 2020 |
|
RU2805003C2 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497451C1 |
| СПОСОБ АНАЛИЗА УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОПОРНЫХ ТОЧЕК СКЕЛЕТНОЙ МОДЕЛИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 2022 |
|
RU2786306C1 |
| Способ контроля положения и дыхания пациента с применением набора инфракрасных датчиков глубины | 2019 |
|
RU2732735C1 |
| СПОСОБ ОТСЛЕЖИВАНИЯ (ТРЕКИНГА) В РЕАЛЬНОМ ВРЕМЕНИ АНАТОМИЧЕСКИХ ОРИЕНТИРОВ ОБЪЕКТА | 2021 |
|
RU2771745C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ С ПОМОЩЬЮ ЖЕСТОВ И 3D-СЕНСОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455676C2 |
| СПОСОБ И СИСТЕМА ВЫЯВЛЕНИЯ ТРЕВОЖНЫХ СОБЫТИЙ ПРИ ВЗАИМОДЕЙСТВИИ С УСТРОЙСТВОМ САМООБСЛУЖИВАНИЯ | 2019 |
|
RU2713876C1 |



Группа изобретений относится к медицине, а именно к способам бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве и программно-аппаратным комплексам для этого. Комплекс содержит вычислительное устройство, бесконтактный сенсор, модуль взаимодействия с бесконтактным сенсором, модуль стабилометрических расчетов и модуль анализа данных. Вычислительное устройство соединено с бесконтактным сенсором, выполненным с возможностью получения трехмерных координат характерных точек тела человека. Модуль взаимодействия с бесконтактным сенсором выполнен с возможностью: получения первичных данных от бесконтактного сенсора и предварительной обработки полученных данных для последующей их передачи в модуль стабилометрических расчетов; автоматической калибровки положения оптической оси сенсора и преобразования получаемых точек координат из системы координат, связанной с положением сенсора в независимую гравитационную систему координат для обеспечения независимости значений, получаемых первичных данных от физического расположения сенсора; фильтрации и сглаживания первичных данных; записи первичных данных для последующей эмуляции работы сенсора с возможностью постобработки из выбранного набора записей; отправки предварительно обработанных первичных данных на вычислительное устройство. Модуль стабилометрических расчетов выполнен с возможностью расчета положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени. Модуль анализа данных выполнен с возможностью анализа и вычисления результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов. Достигается возможность бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве. 2 н. и 6 з.п. ф-лы, 6 ил.
1. Программно-аппаратный комплекс для бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве, содержащий:
вычислительное устройство, соединенное с бесконтактным сенсором, выполненным с возможностью получения трехмерных координат характерных точек тела человека, находящегося в поле зрения сенсора;
модуль взаимодействия с бесконтактным сенсором, выполненный с возможностью:
получения первичных данных от бесконтактного сенсора и предварительной обработки полученных данных для последующей их передачи в модуль стабилометрических расчетов;
автоматической калибровки положения оптической оси сенсора и преобразования получаемых точек координат из системы координат, связанной с положением сенсора, в независимую гравитационную систему координат для обеспечения независимости значений получаемых первичных данных от физического расположения сенсора;
фильтрации и сглаживания первичных данных для увеличения точности последующих расчетов;
записи первичных данных для последующей эмуляции работы сенсора с возможностью постобработки из выбранного набора записей;
отправки предварительно обработанных первичных данных на вычислительное устройство;
модуль стабилометрических расчетов, выполненный с возможностью расчета положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени;
модуль анализа данных, выполненный с возможностью анализа и вычисления результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов.
2. Программно-аппаратный комплекс по п. 1, в котором модуль взаимодействия с бесконтактным сенсором имеет возможность осуществлять отправку предварительно обработанных первичных данных на вычислительное устройство, располагающееся в пределах локальной сети и имеющее возможность приема и обработки первичных данных.
3. Программно-аппаратный комплекс по п. 1, в котором модуль стабилометрических расчетов выполнен с возможностью:
построения трехмерной модели сегментов тела человека по данным, полученным от модуля взаимодействия с сенсором;
вычисления текущего положения центра тяжести человека в трехмерном пространстве на основании модели сегментов тела.
4. Программно-аппаратный комплекс по п. 1, в котором модуль анализа данных выполнен с возможностью:
вычисления сводных и медицинских характеристик положения и скорости изменения положения центра тяжести;
построения временных последовательностей координат положения и скорости изменения положения центра тяжести;
построения амплитудно-частотных характеристик координат положения и скорости изменения положения центра тяжести;
построения статистических интервальных распределений координат положения и скорости изменения положения центра тяжести, в том числе и в полярном представлении.
5. Программно-аппаратный комплекс по п. 1, в котором вычислительное устройство выполнено с возможностью осуществлять связь с бесконтактным сенсором по USB-интерфейсу.
6. Способ бесконтактного вычисления положения центра тяжести человека в трехмерном пространстве, реализуемый программно-аппаратным комплексом по п. 1, содержащий этапы, на которых:
посредством модуля взаимодействия с бесконтактным сенсором осуществляют:
получение первичных данных от бесконтактного сенсора и осуществляют предварительную обработку данных для последующей их передачи в модуль стабилометрических расчетов;
автоматическую калибровку положения оптической оси сенсора и преобразование получаемых точек координат из системы координат, связанной с положением сенсора, в независимую гравитационную систему координат для обеспечения независимости значений получаемых первичных данных от физического расположения сенсора;
фильтрацию и сглаживание первичных данных для увеличения точности последующих расчетов;
запись первичных данных для последующей эмуляции работы сенсора с возможностью постобработки из выбранного набора записей;
отправку предварительно обработанных первичных данных на вычислительное устройство;
посредством модуля стабилометрических расчетов осуществляют расчет положения центра тяжести человека в трехмерной системе координат в реальном масштабе времени;
посредством модуля анализа данных осуществляют анализ и вычисление результатов о положении центра тяжести, полученных от модуля стабилометрических расчетов.
7. Способ по п. 6, в котором посредством модуля стабилометрических расчетов осуществляют:
построение трехмерной модели сегментов тела человека по данным, полученным от модуля взаимодействия с сенсором;
вычисление текущего положения центра тяжести человека в трехмерном пространстве на основании модели сегментов тела.
8. Способ по п. 6, в котором посредством модуля анализа данных осуществляют:
вычисление сводных и медицинских характеристик положения и скорости изменения положения центра тяжести;
построение временных последовательностей координат положения и скорости изменения положения центра тяжести;
построение амплитудно-частотных характеристик координат положения и скорости изменения положения центра тяжести;
построение статистических интервальных распределений координат положения и скорости изменения положения центра тяжести, в том числе и в полярном представлении.
| WO 2013084031 A1, 13.06.2013 | |||
| СПОСОБ ПОВЫШЕНИЯ ИНФОРМАТИВНОСТИ СТАБИЛОМЕТРИЧЕСКОГО ИССЛЕДОВАНИЯ И АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2665957C2 |
| US 2005182341 A1, 18.08.2005 | |||
| АППАРАТНЫЙ КОМПЛЕКС ДЛЯ РЕГИСТРАЦИИ, АНАЛИЗА И МОДЕЛИРОВАНИЯ СТРУКТУРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 2010 |
|
RU2442533C2 |
| JP 2002213923 A, 31.07.2002. | |||

